
Acceleration-Insensitive Pressure Sensor for Aerodynamic Analysis


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Origin of Research on Influence of Acceleration on Pressure Processing
2. Study of the Influence of Acceleration in Classic MEMS Transducers
2.1. Methodology
2.2. Initial Verification of Transducer Sensitivity to Static Acceleration
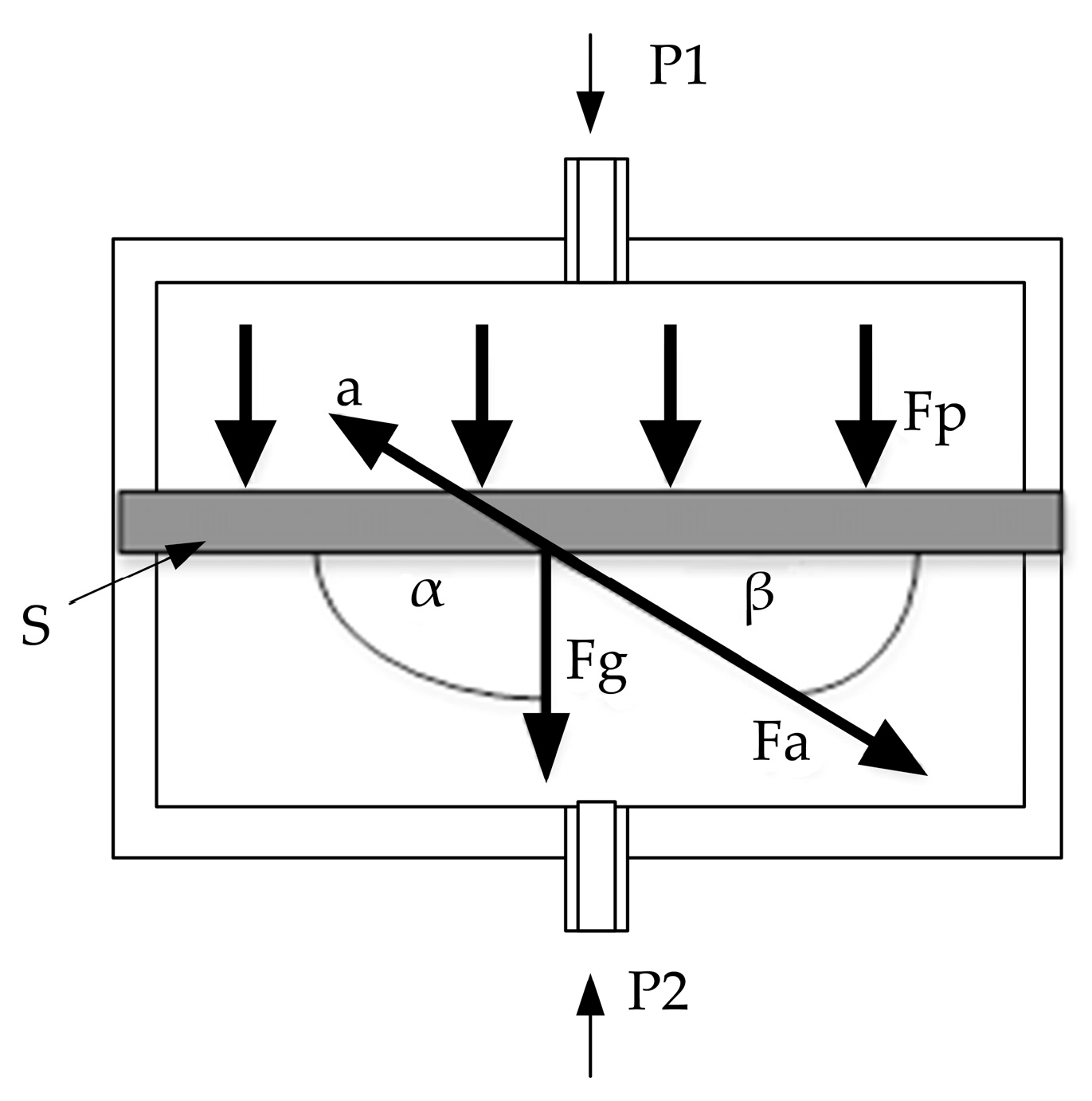
- Fp—pressure force, N;
- S—surface of the membrane, m2;
- Δp—pressure difference, Pa.
- Fg—gravitational force, N;
- mm—mass of the membrane, kg;
- mz—mass of the gel separator, kg;
- g—gravitational acceleration; 9.81 ms−2;
- α—angle between the plane of the membrane and the vertical direction in which gravitational force acts, °;
- Uout—output signal from the transducer, V;
- Uz—supply voltage of the transducer’s bridge; V;
- K—amplification of transducer.
- Fa—acceleration force, N;
- mm—mass of the membrane, kg;
- mz—mass of the gel separator, kg;
- dv/dt—acceleration of the moving sensor or object with a sensor; ms−2;
- β—angle between the plane of the membrane and the direction of movement of the object, °;
- Uout—output signal from the transducer, V;
- Uz—supply voltage of the transducer’s bridge; V;
- K—amplification of the transducer.
- ΣF—sum of forces, N;
- S—surface of the membrane, m2;
- Δp—pressure difference, Pa;
- mm—mass of the membrane, kg;
- mz—mass of the gel separator, kg;
- (mm + mz)—mass of the membrane and gel separator, kg;
- g—gravitational acceleration; 9.81 ms−2;
- dv/dt—acceleration of the moving sensor or the object with a sensor, ms−2;
- Uout—output signal from the transducer, V;
- Uz—supply voltage of the transducer’s bridge; V;
- K—amplification of the transducer;
- Fg—gravitational force, N;
- Fa—acceleration force, N;
- α—angle between the plane of the membrane and the vertical direction in which gravitational force acts, °;
- β—angle between the plane of the membrane and direction of movement of the object, °.
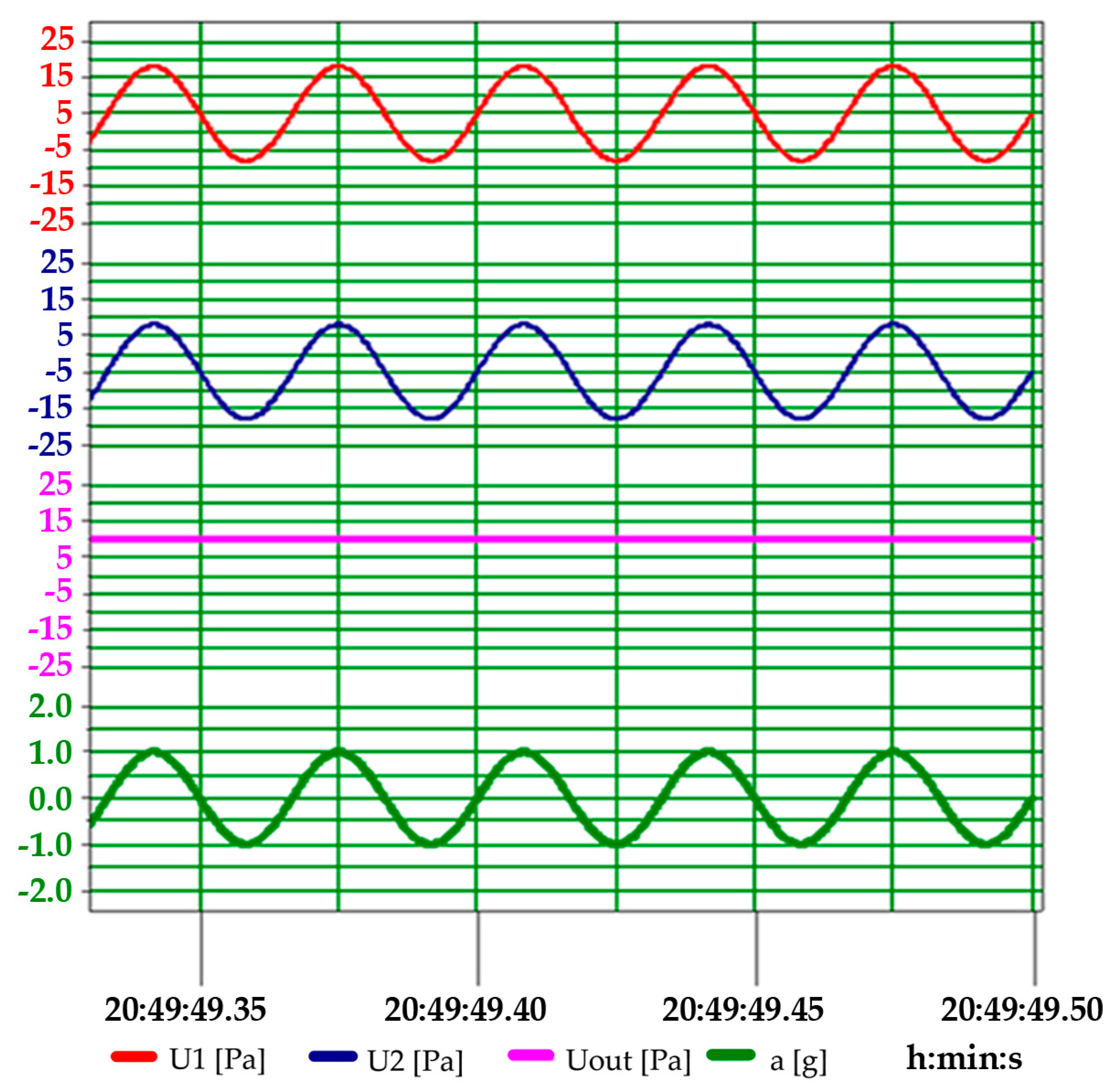
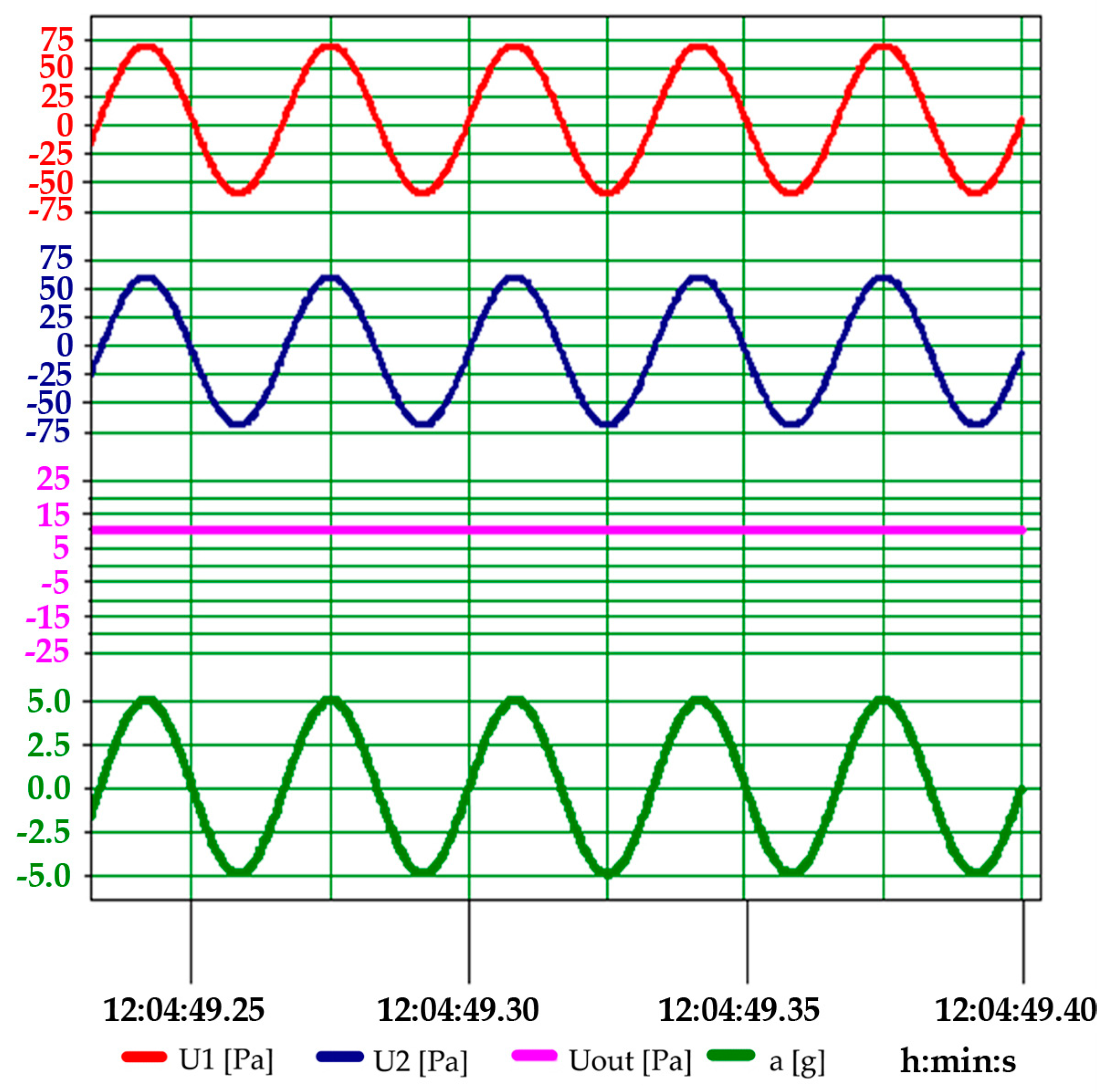
2.3. Verification of Transducer Sensitivity to Dynamic Acceleration
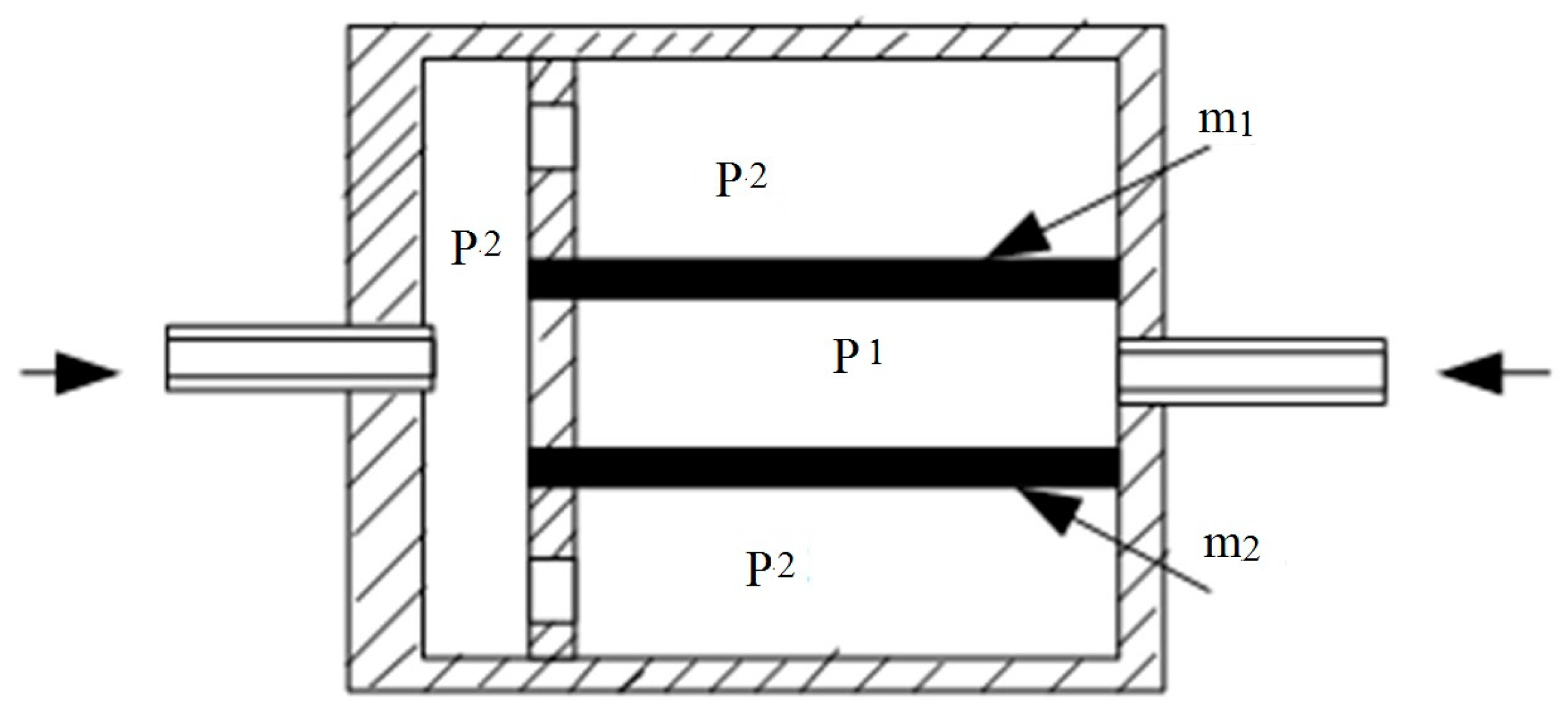
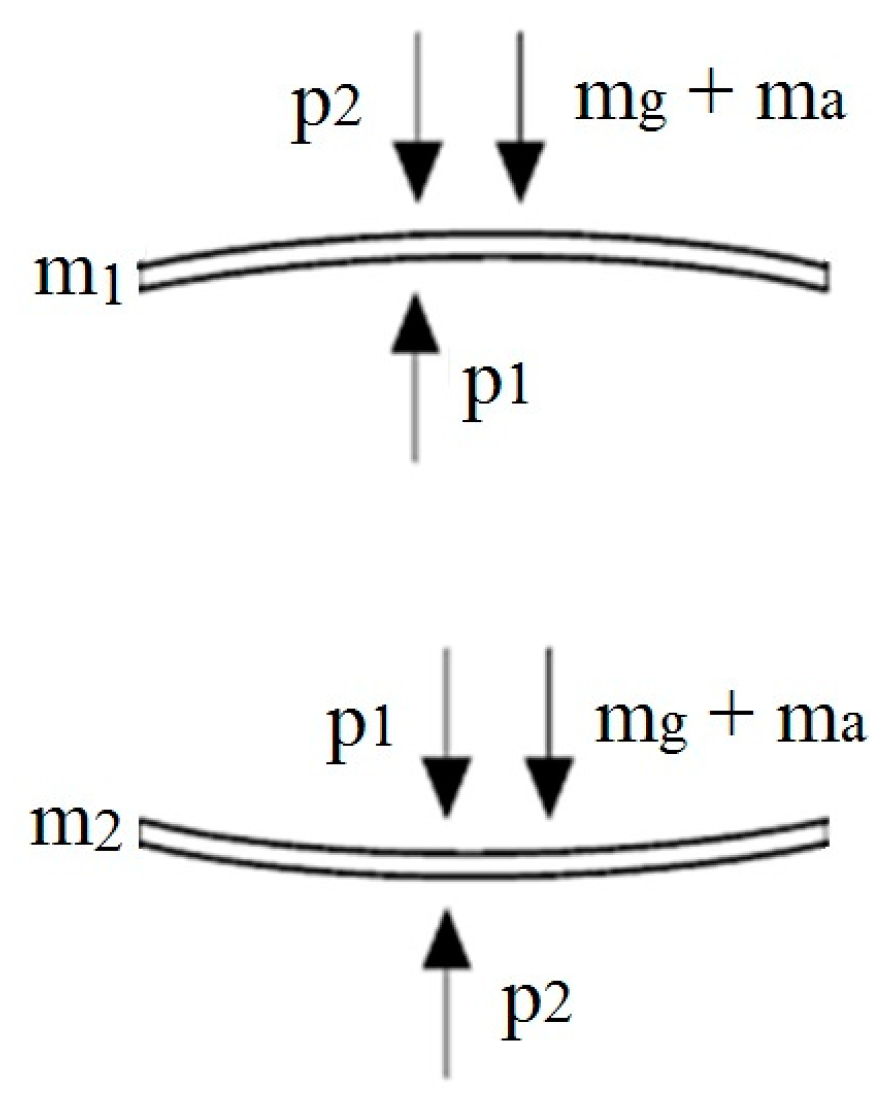
3. Acceleration-Insensitive Transducer Concept
- U1—output signal, V;
- k—amplification factor;
- Δp—pressure difference, Pa;
- m = mm + mz—mass of the membrane and gel separator, kg;
- mm—mass of the membrane, kg;
- mz—mass of the gel separator, kg;
- g—gravitational acceleration; 9.81 ms−2;
- a—acceleration of the moving sensor or the object with a sensor; ms−2.
- U2—output signal, V;
- k—amplification factor;
- −Δp—pressure difference, Pa;
- m = mm + mz—mass of the membrane and gel separator, kg;
- mm—mass of the membrane, kg;
- mz—mass of the gel separator, kg;
- g—gravitational acceleration; 9.81 ms−2;
- a—acceleration of the moving sensor or the object with a sensor; ms−2.
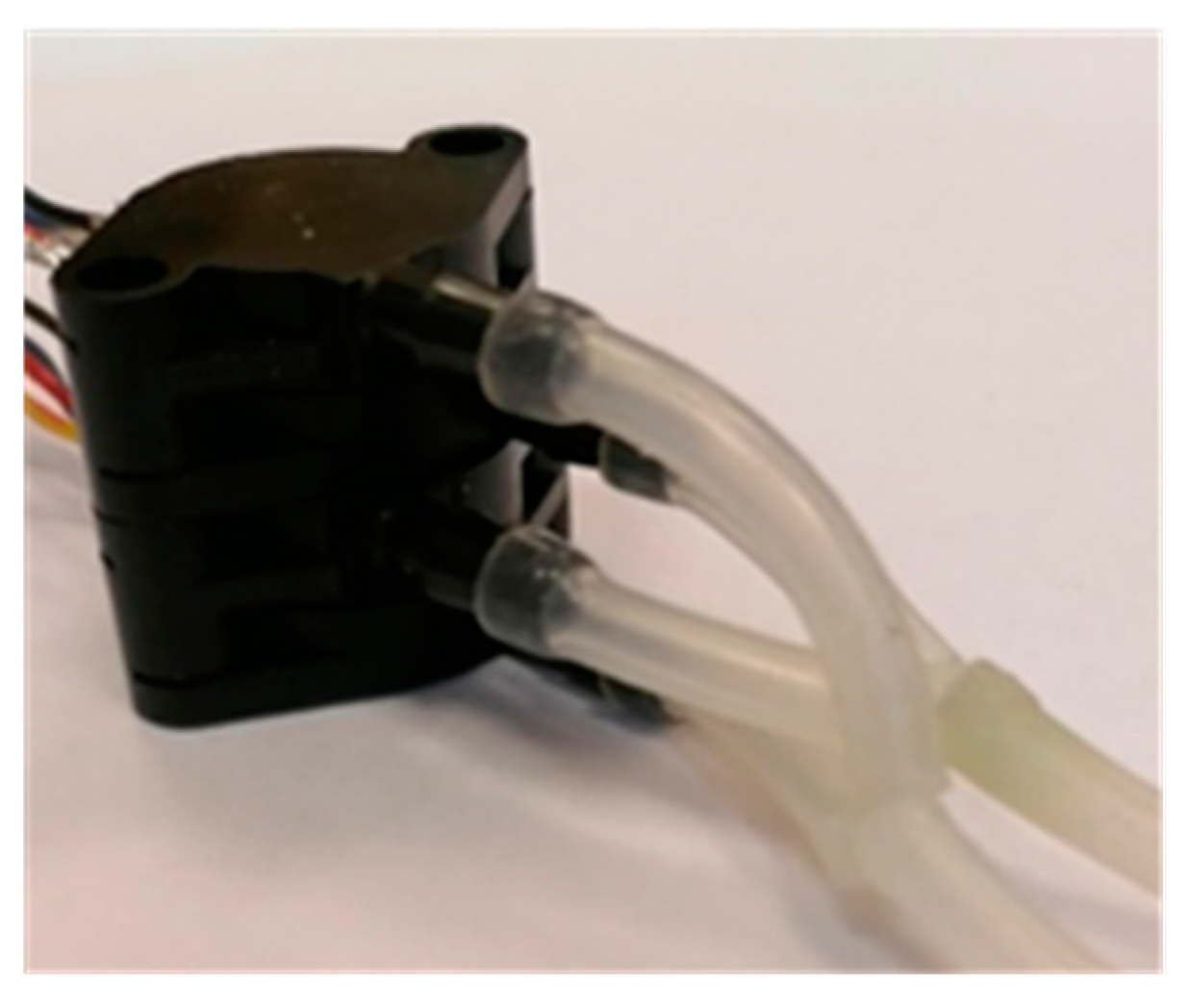
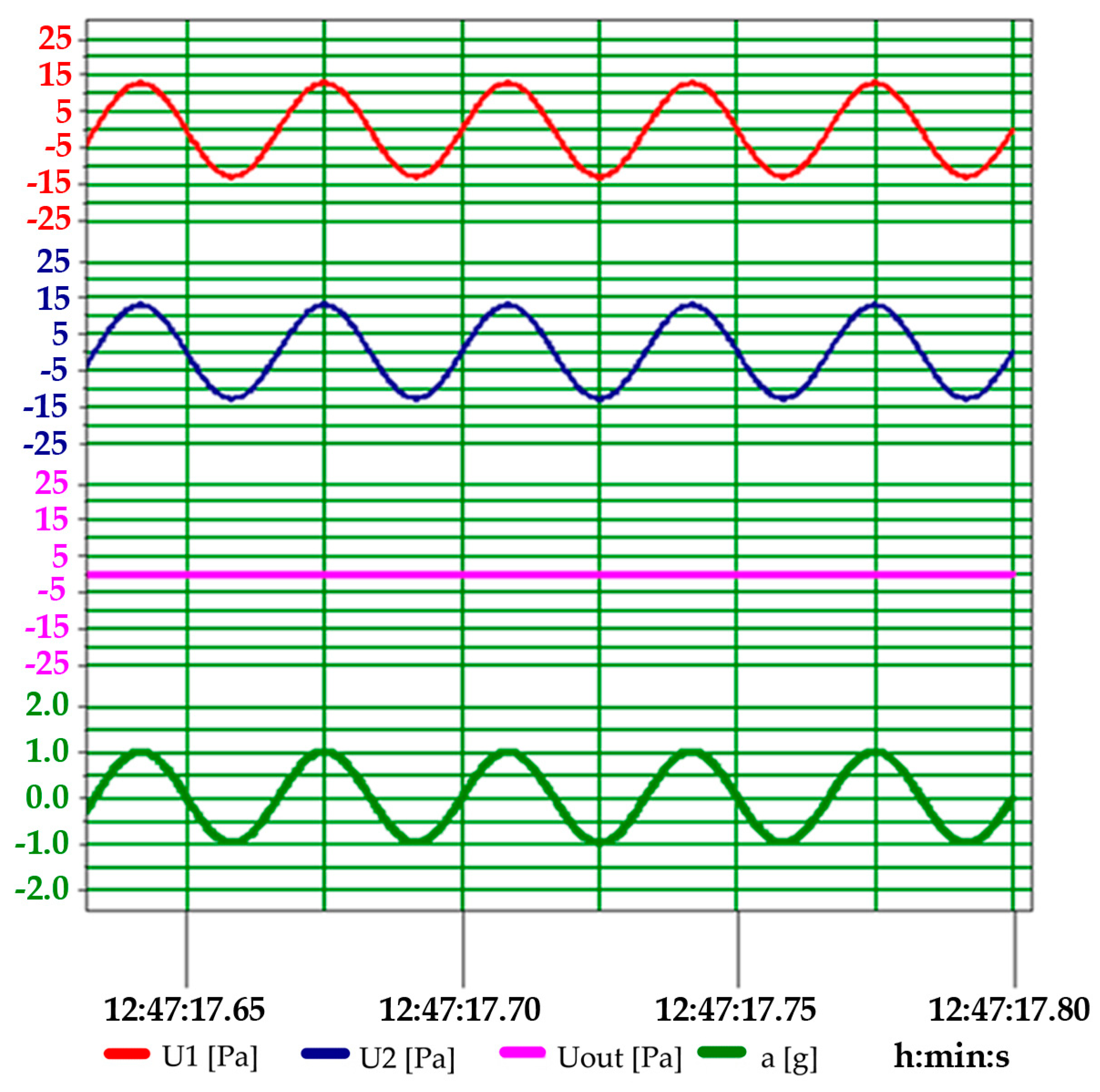
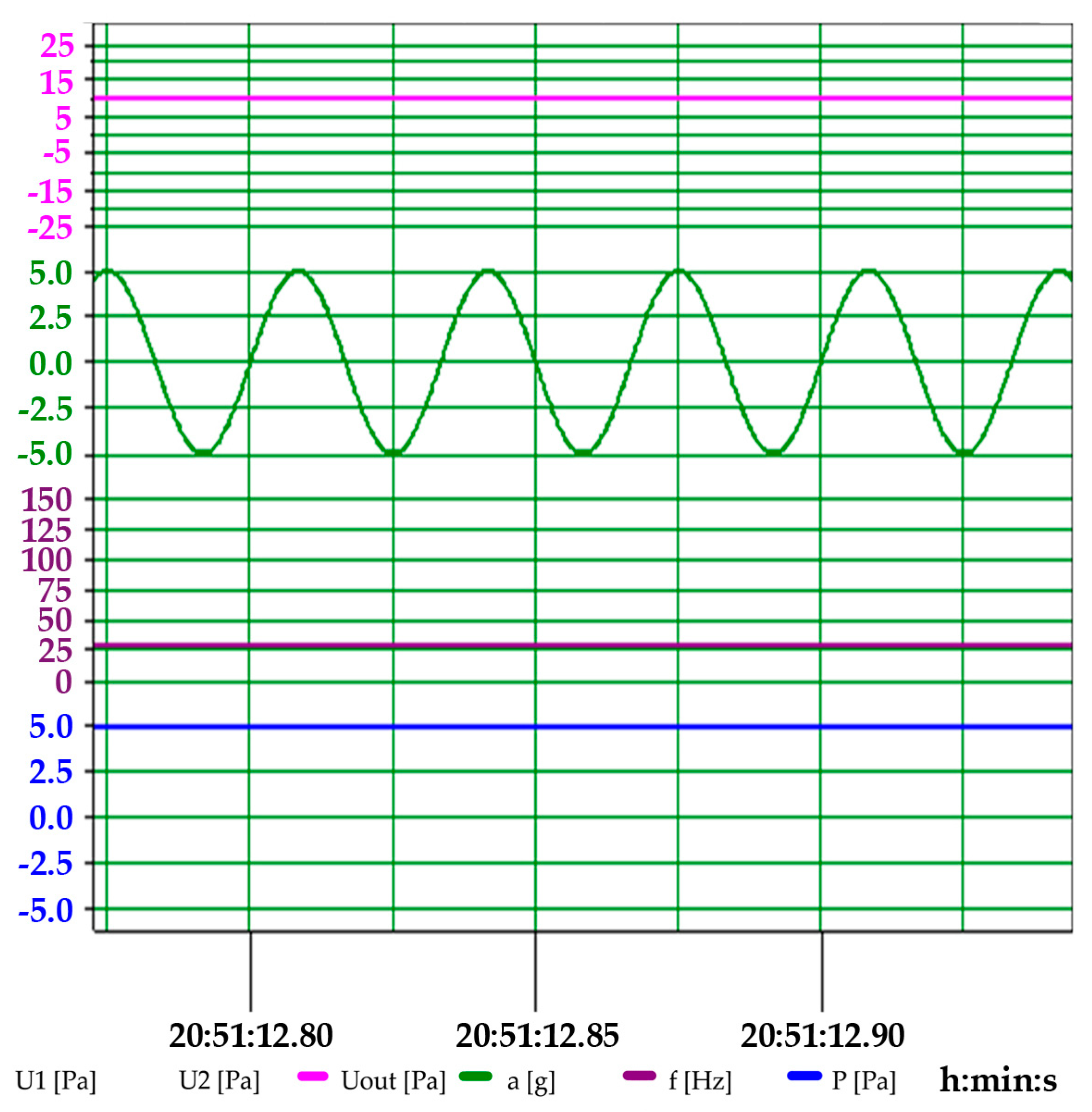
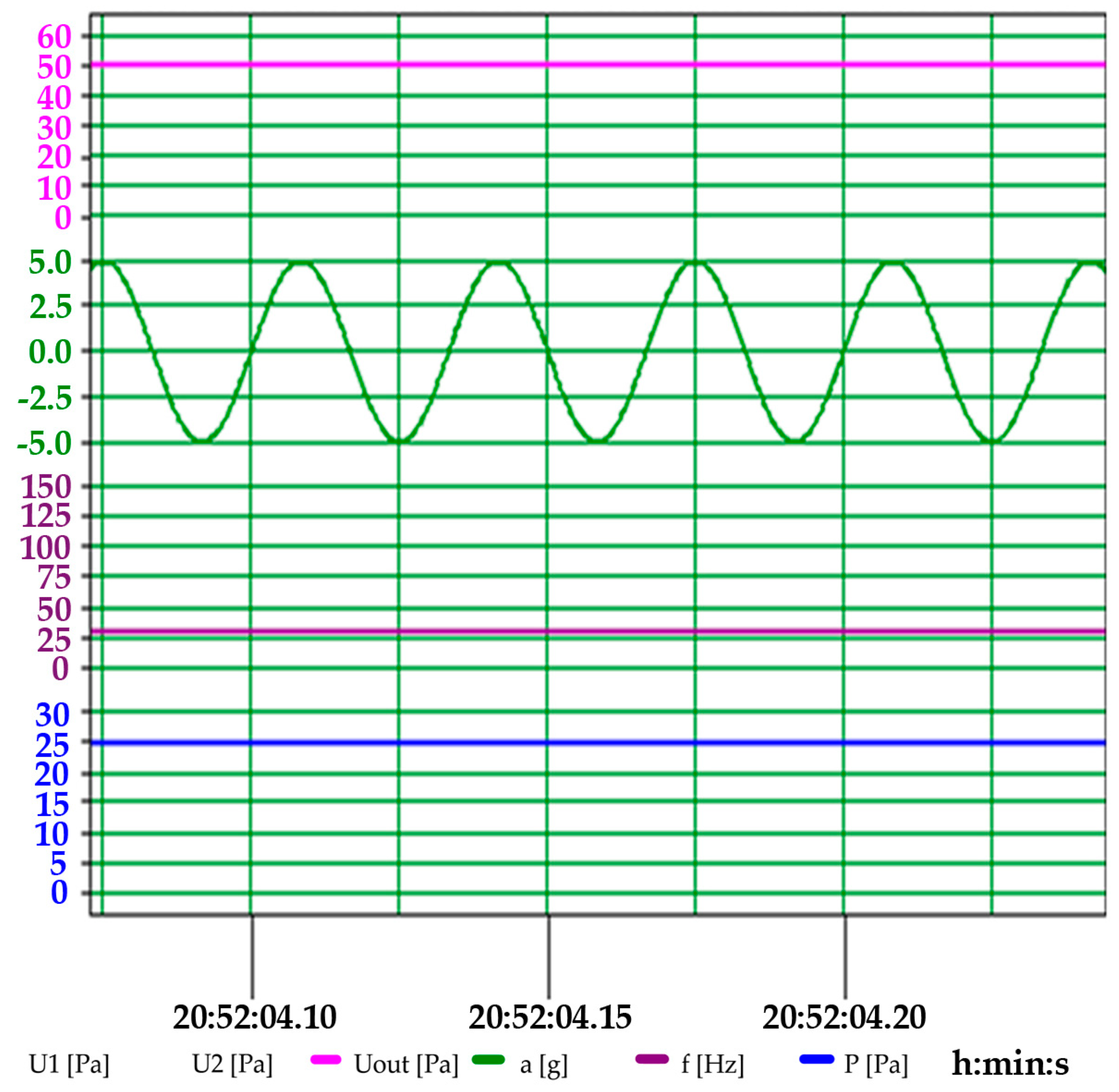
Results of Experiment with a Double-Membrane Sensor
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Szczerba, Z.; Szczerba, P. Selected properties of modern pressure transducers. Electro Technical Rev. 2016, 1, 192–195. [Google Scholar] [CrossRef]
- Szczerba, Z.; Szczerba, P.; Szczerba, K. Sensitivity of Piezoresistive Pressure Sensors to Acceleration. Energies 2022, 15, 493. [Google Scholar] [CrossRef]
- Mazur, D.; Szczerba, Z.; Gołębiowski, L.; Smoleń, A.; Gołębiowski, M. Modeling and Analysis of the AFPM Generator in a Small Wind Farm System. In Methods and Techniques of Signal Processing in Physical Measurements; MSM 2018. Lecture Notes in Electrical Engineering; Hanus, R., Mazur, D., Kreischer, C., Eds.; Springer Nature: Basel, Switzerland, 2019; Volume 548, pp. 202–210. [Google Scholar] [CrossRef]
- Szczerba, Z.; Szczerba, P.; Szczerba, K. Differential Pressure Transducer Patent P—240391. Available online: https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.431352 (accessed on 1 January 2023).
- Szczerba, Z. Pressure Sensor and Pressure Measuring Method, Patent P-225030. Available online: https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.406992?lng=Pl (accessed on 1 January 2023).
- August, R.; Maudie, T.; Miller, T.F.; Thompson, E. Acceleration sensitivity of micromachined pressure sensors. Proc. SPIE 3876 Micromachined Devices Compon. 1999, 46–53. [Google Scholar] [CrossRef]
- Bao, M.H. Micro Mechanical Transducers. Handbook of Sensors and Actuators; Elsevier: Amsterdam, The Netherlands, 2000; ISBN 9780080524030/9780444505583. [Google Scholar]
- Bishop, R.H. The Mechatronics Handbook; The University of Texas at Austin: Austin, TX, USA, 2002; ISBN 0-8493-0066-5. [Google Scholar]
- Büttgenbach, S.; Constantinou, I.; Dietzel, A.; Leester-Schädel, M. Case Studies in Micromechatronics; Springer: Cham, Switzerland, 2020; ISBN 978-3-662-61319-1/978-3-662-61320-7. [Google Scholar]
- Changzheng, W.; Wei, Z.; Quan, W.; Xiaoyuan, X.; Xinxin, L. TPMS (tire-pressure monitoring system) sensors: Monolithic integration of surface-micromachined piezoresistive pressure sensor and self-testable accelerometer. Microelectron. Eng. 2012, 91, 167–173. [Google Scholar]
- Dhanaselvam, P.S.; Kumar, D.S.; Ramakrishnan, V.N.; Ramkumar, K.; Balamurugan, N.B. Pressure Sensors Using Si/ZnO Heterojunction Diode. Silicon 2021, 14, 4121–4127. [Google Scholar] [CrossRef]
- Gao, L.; Wang, M.; Wang, W.; Xu, H.; Wang, Y.; Zhao, H.; Cao, K.; Xu, D.; Li, L. Highly Sensitive Pseudocapacitive Iontronic Pressure Sensor with Broad Sensing Range. Nano-Micro Lett. 2021, 13, 1–14. [Google Scholar] [CrossRef]
- Jiang, B.; Xing-lin, Q.; Jiakai, L.; Bo, J. Design of Piezoresistive MEMS Pressure Sensor Chip for Special Environments. Sens. Transducers IFSA 2014, 174, 1. [Google Scholar]
- Kordrostami, Z.; Hassanli, K.; Akbarian, A. MEMS piezoresistive pressure sensor with patterned thinning of diaphragm. Microelectron. Int. 2020, 37, 147–153. [Google Scholar] [CrossRef]
- Palczynska, A.; Gromala, P.J.; Mayer, D.; Han, B.; Melz, T. In-situ investigation of EMC relaxation behavior using piezoresistive stress sensor. Microelectron. Reliab. 2016, 62, 58–62. [Google Scholar] [CrossRef]
- Nag, M.; Kumar, A.; Pratap, B. A novel graphene pressure sensor with zig–zag shaped piezoresistors for maximum strain coverage for enhancing the sensitivity of the pressure sensor. Int. J. Simul. Multidiscip. Des. Optim. 2021, 12, 14. [Google Scholar] [CrossRef]
- Menna, F.; Nocerino, E.; Chemisky, B.; Remondino, F.; Drap, P. Accurate scaling and levelling in underwater photogrammetry with a pressure sensor. ISPRS—Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2021, XLIII-B2-2, 667–672. [Google Scholar] [CrossRef]
- Ni, Z.; Yang, C.; Xu, D.; Zhou, H.; Zhou, W.; Li, T.; Xiong, B.; Li, X. Monolithic Composite “Pressure + Acceleration + Temperature + Infrared” Sensor Using a Versatile Single-Sided “SiN/Poly-Si/Al” Process-Module. Sensors 2013, 13, 1085–1101. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, H.; Li, Z.; Gu, M.; Hu, Y.; Xu, L.; Jiang, D.; Cheng, S.; Zou, Y.; Deng, Y.; Shi, B.; et al. A Bioresorbable Dynamic Pressure Sensor for Cardiovascular Postoperative Care. Adv. Mater. 2021, 33. [Google Scholar] [CrossRef]
- Raab, C.; Rohde-Brandenburger, K. Dynamic flight load measurements with MEMS pressure sensors. CEAS Aeronaut. J. 2021, 12, 737–753. [Google Scholar] [CrossRef]
- Rónai, L.; Lénárt, J.; Szabó, T. Development of a Low-cost Pressure Sensor. Int. J. Eng. Manag. Sci. 2020, 5, 33–38. [Google Scholar] [CrossRef]
- Wang, J.; Xia, X.; Li, X. Monolithic Integration of Pressure Plus Acceleration Composite TPMS Sensors with a Single-Sided Micromachining Technology. J. Microelectromechanical Syst. 2011, 21, 284–293. [Google Scholar] [CrossRef]
- Wilson, J.S. Sensor Technology Handbook; Elsevier: Amsterdam, The Netherlands, 2005; ISBN 0-7506-7729-5. [Google Scholar]
- Xu, F.; Ma, T. Modeling and Studying Acceleration-Induced Effects of Piezoelectric Pressure Sensors Using System Identification Theory. Sensors 2019, 19, 1052. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Zhao, Y.; Jiang, Z.; Sun, J. A monolithic silicon multi-sensor for measuring three-axis acceleration, pressure and temperature. J. Mech. Sci. Technol. 2008, 22, 731–739. [Google Scholar] [CrossRef]
- Kapuscinski, T.; Szczerba, P.; Rogalski, T.; Rzucidlo, P.; Szczerba, Z. A Vision-Based Method for Determining Aircraft State during Spin Recovery. Sensors 2020, 20, 2401. [Google Scholar] [CrossRef]
- Rzasa, M.; Czapla-Nielacna, B. Analysis of the Influence of the Vortex Shedder Shape on the Metrological Properties of the Vortex Flow Meter. Sensors 2021, 21, 4697. [Google Scholar] [CrossRef]
- Tomaszewska-Wach, B.; Rzasa, M. A Correction Method for Wet Gas Flow Metering Using a Standard Orifice and Slotted Orifices. Sensors 2021, 21, 2291. [Google Scholar] [CrossRef] [PubMed]
- Mariello, M.; Blad, T.; Mastronardi, V.; Madaro, F.; Guido, F.; Staufer, U.; Tolou, N.; De Vittorio, M. Flexible piezoelectric AlN transducers buckled through package-induced preloading for mechanical energy harvesting. Nano Energy 2021, 85, 105986. [Google Scholar] [CrossRef]
- Pytel, K.; Szczerba, Z.; Farmaha, I.; Kurdziel, F.; Kalwar, A.; Gumula, S. Acquisition of Signals in a Wind Tunnel Using the Dasylab Software Package. In Proceedings of the 2020 IEEE XVIth International Conference on the Perspective Technologies and Methods in MEMS Design (MEMSTECH), Lviv, Ukraine, 22–26 April 2020. [Google Scholar] [CrossRef]
- Pytel, K.; Hudy, W.; Kurdziel, F.; Kalwar, A.; Gumula, S.; Soliman, M.H. Application of Correlation Analysis for Impact Assessment of Air Quality on the Possibility of Using Chosen Source of Renewable Energy. In Proceedings of the 2020 IEEE XVIth International Conference on the Perspective Technologies and Methods in MEMS Design (MEMSTECH), Lviv, Ukraine, 22–26 April 2020. [Google Scholar] [CrossRef]
- Pytel, K.; Marikutsa, U.; Szczerba, Z.; Kurdziel, F.; Kalwar, A.; Soliman, M.H. Application of Information Technology Engineering Tools to Simulate an Operation of a Flow Machine Rotor. In Proceedings of the 2020 IEEE XVIth International Conference on the Perspective Technologies and Methods in MEMS Design (MEMSTECH), Lviv, Ukraine, 22–26 April 2020. [Google Scholar] [CrossRef]
- Hudy, W.; Piaskowska-Silarska, M.; Pytel, K.; Gumula, S.; Marikutsa, U.; Farmaha, I. Application of evolutionary algorithms to analysis the possibilities of wind energy use. In Proceedings of the 2019 20th International Carpathian Control Conference (ICCC), Krakow-Wieliczka, Poland, 26–29 May 2019. [Google Scholar] [CrossRef]





















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szczerba, Z.; Szczerba, P.; Szczerba, K.; Pytel, K. Acceleration-Insensitive Pressure Sensor for Aerodynamic Analysis. Energies 2023, 16, 3040. https://doi.org/10.3390/en16073040
Szczerba Z, Szczerba P, Szczerba K, Pytel K. Acceleration-Insensitive Pressure Sensor for Aerodynamic Analysis. Energies. 2023; 16(7):3040. https://doi.org/10.3390/en16073040
Chicago/Turabian StyleSzczerba, Zygmunt, Piotr Szczerba, Kamil Szczerba, and Krzysztof Pytel. 2023. "Acceleration-Insensitive Pressure Sensor for Aerodynamic Analysis" Energies 16, no. 7: 3040. https://doi.org/10.3390/en16073040
APA StyleSzczerba, Z., Szczerba, P., Szczerba, K., & Pytel, K. (2023). Acceleration-Insensitive Pressure Sensor for Aerodynamic Analysis. Energies, 16(7), 3040. https://doi.org/10.3390/en16073040