
Electromechanical Coupling Dynamic Characteristics of the Dual-Motor Electric Drive System of Hybrid Electric Vehicles


Abstract
:1. Introduction
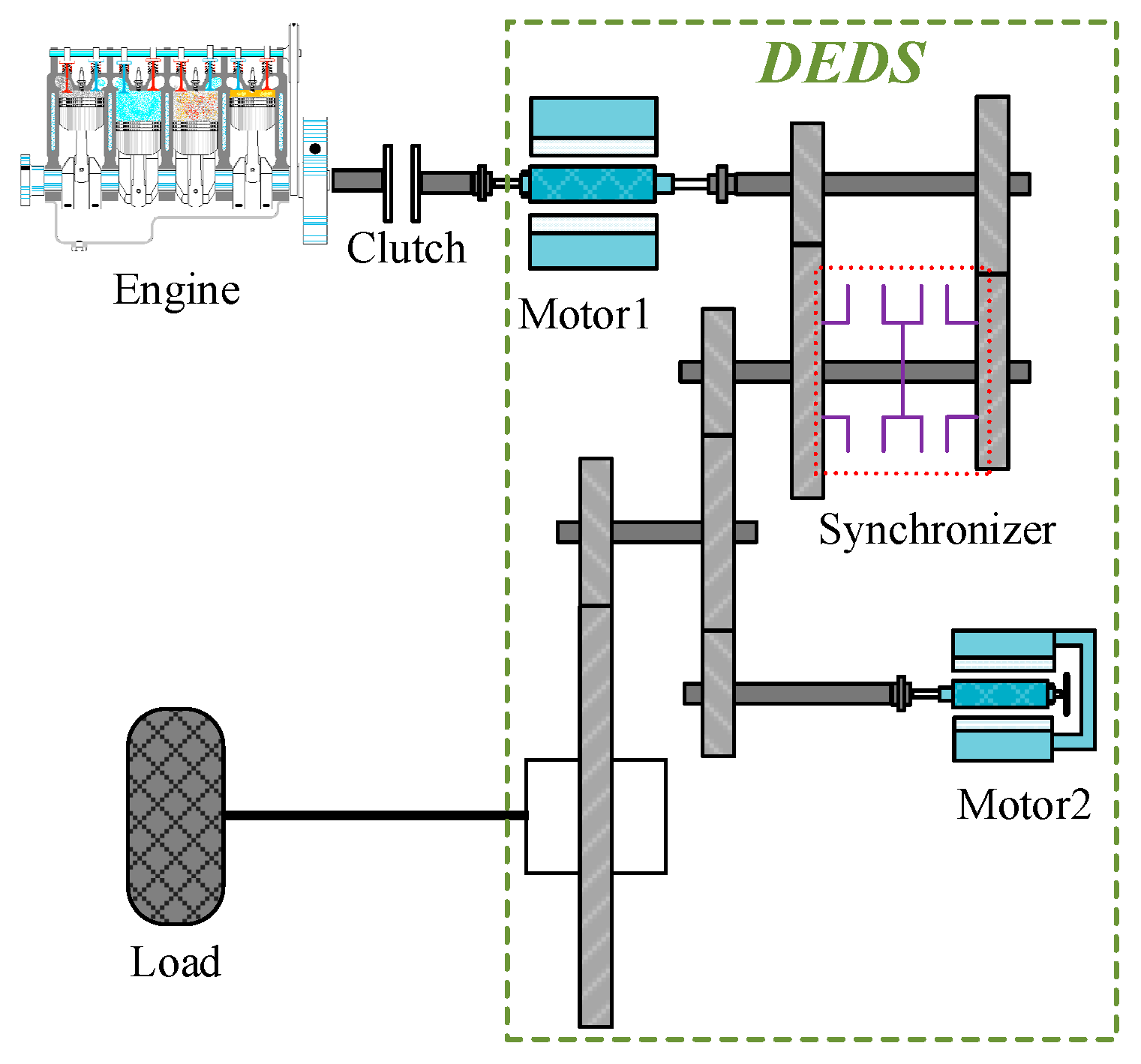
2. Electromechanical Coupling Dynamics Model of the DEDS of an HEV
2.1. Model of a PMSM
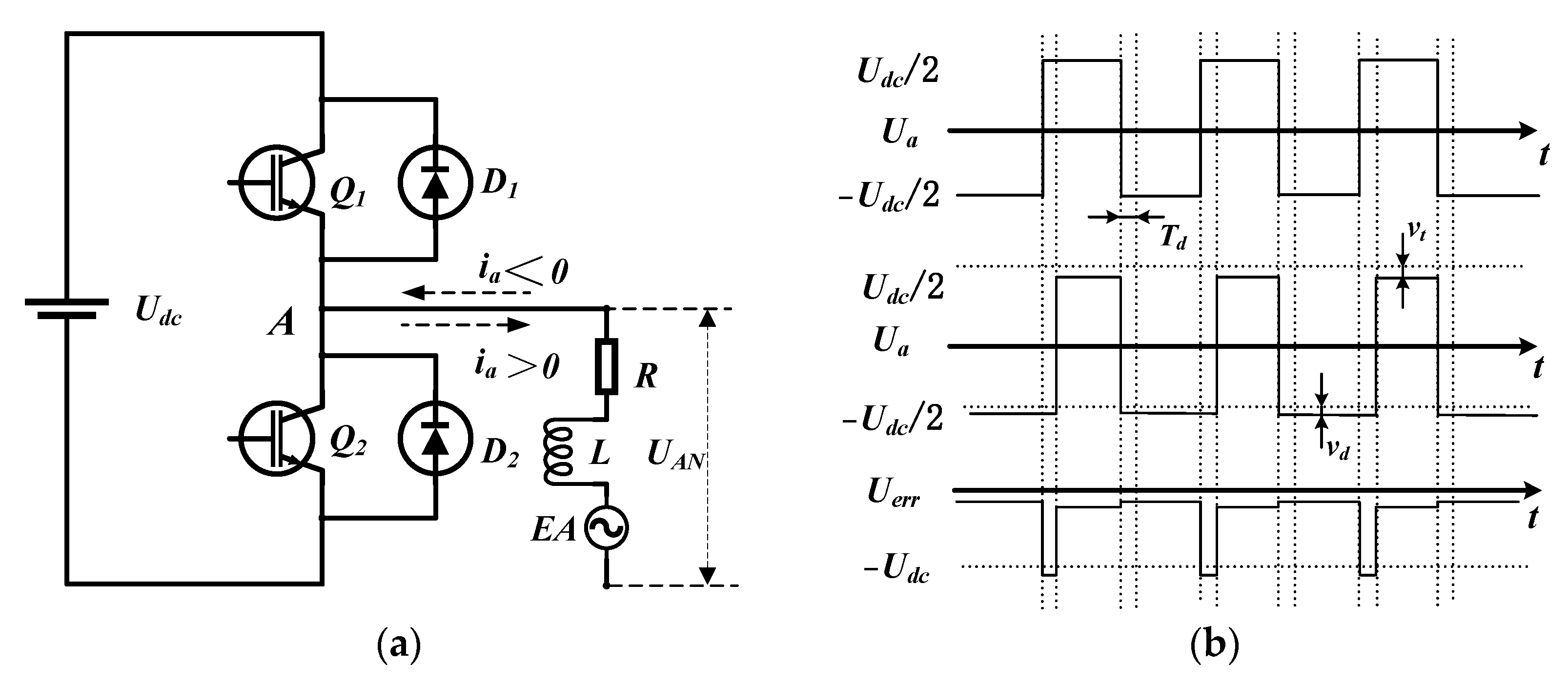
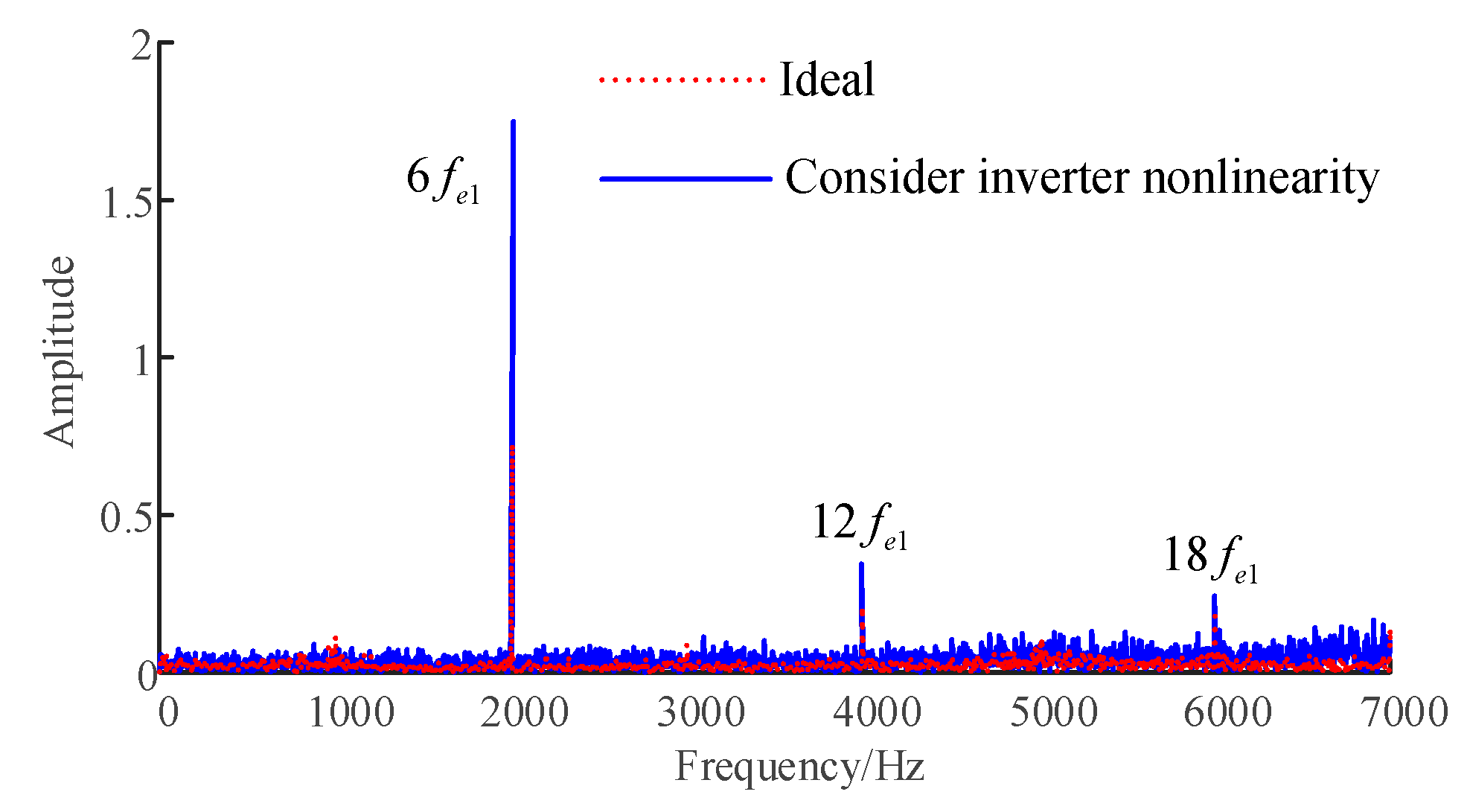
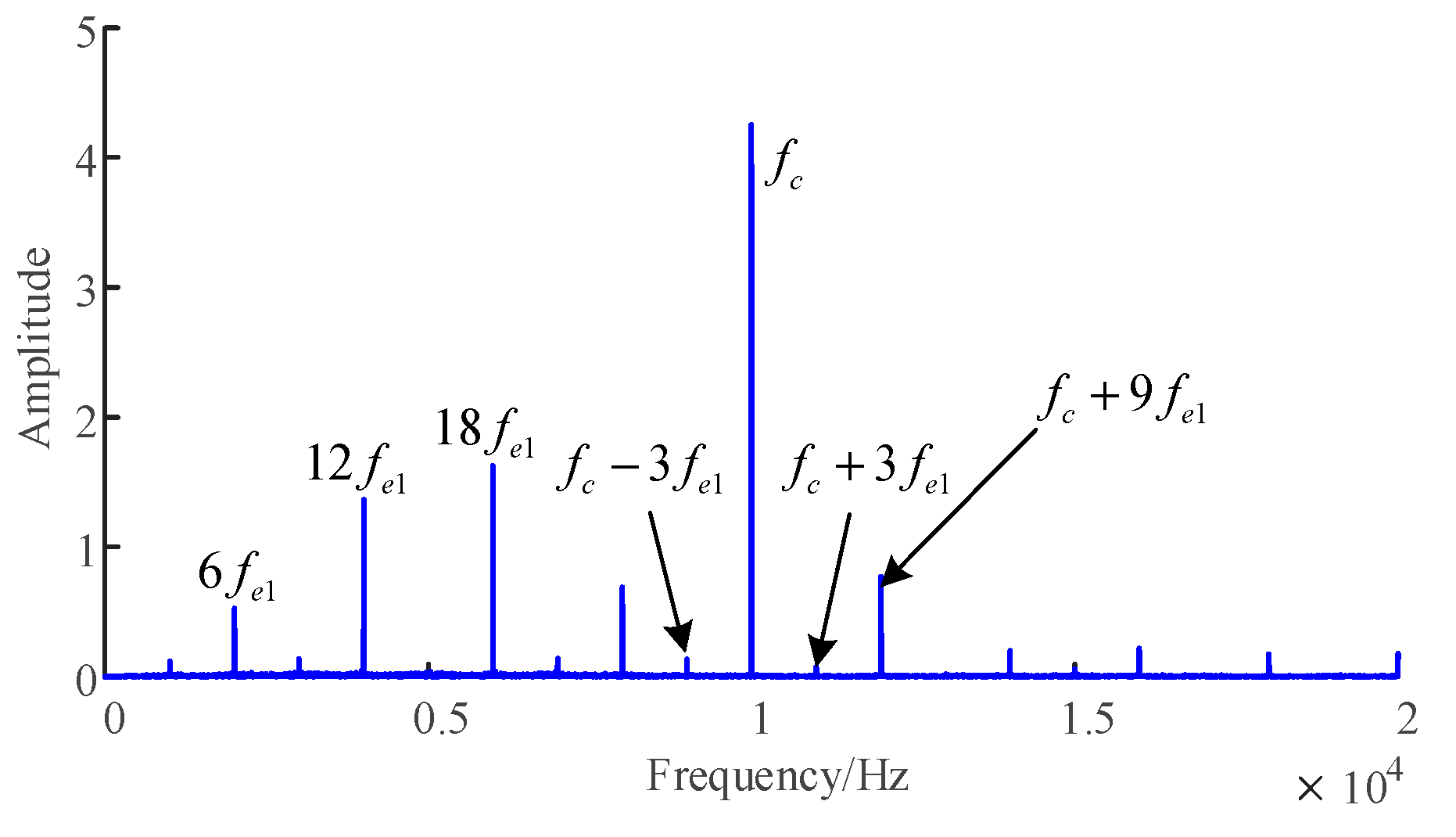
2.2. Nonlinear Model of the Inverter
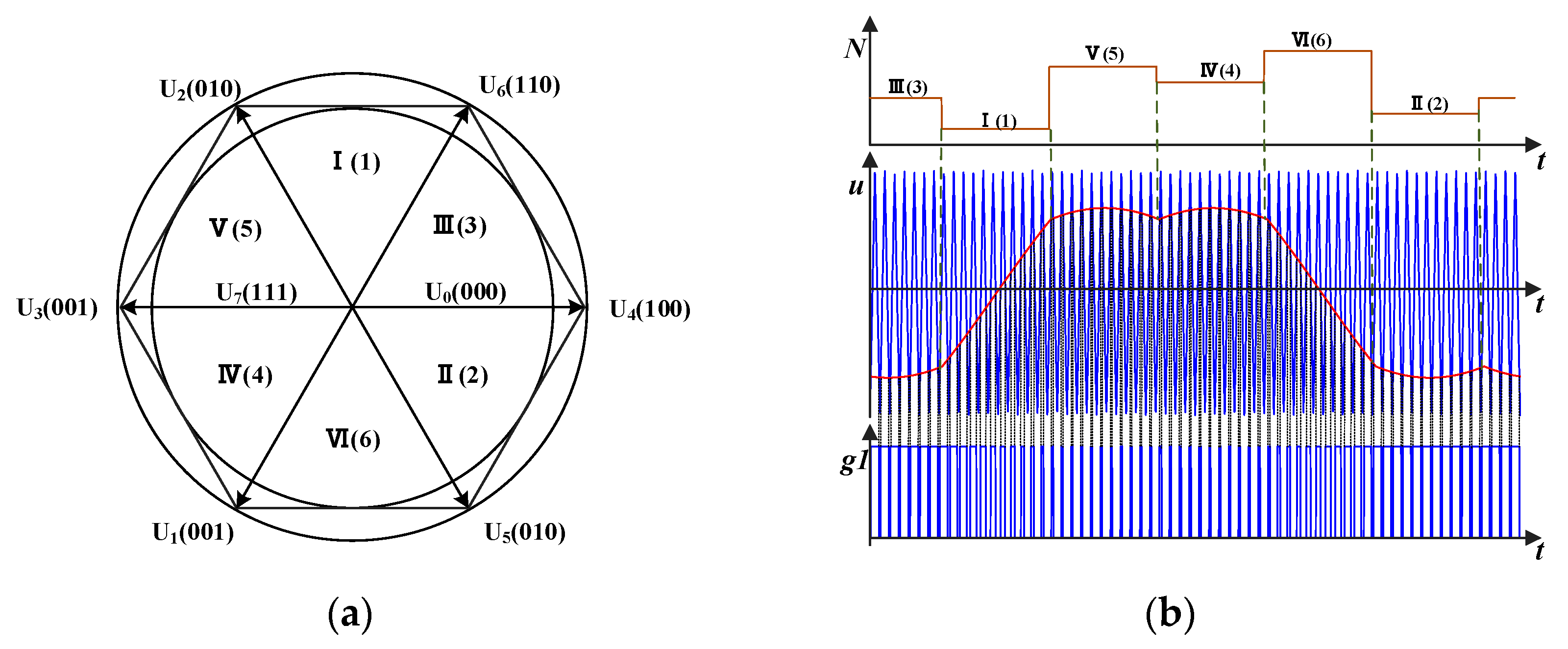
2.3. Implementation of the SVPWM Algorithm
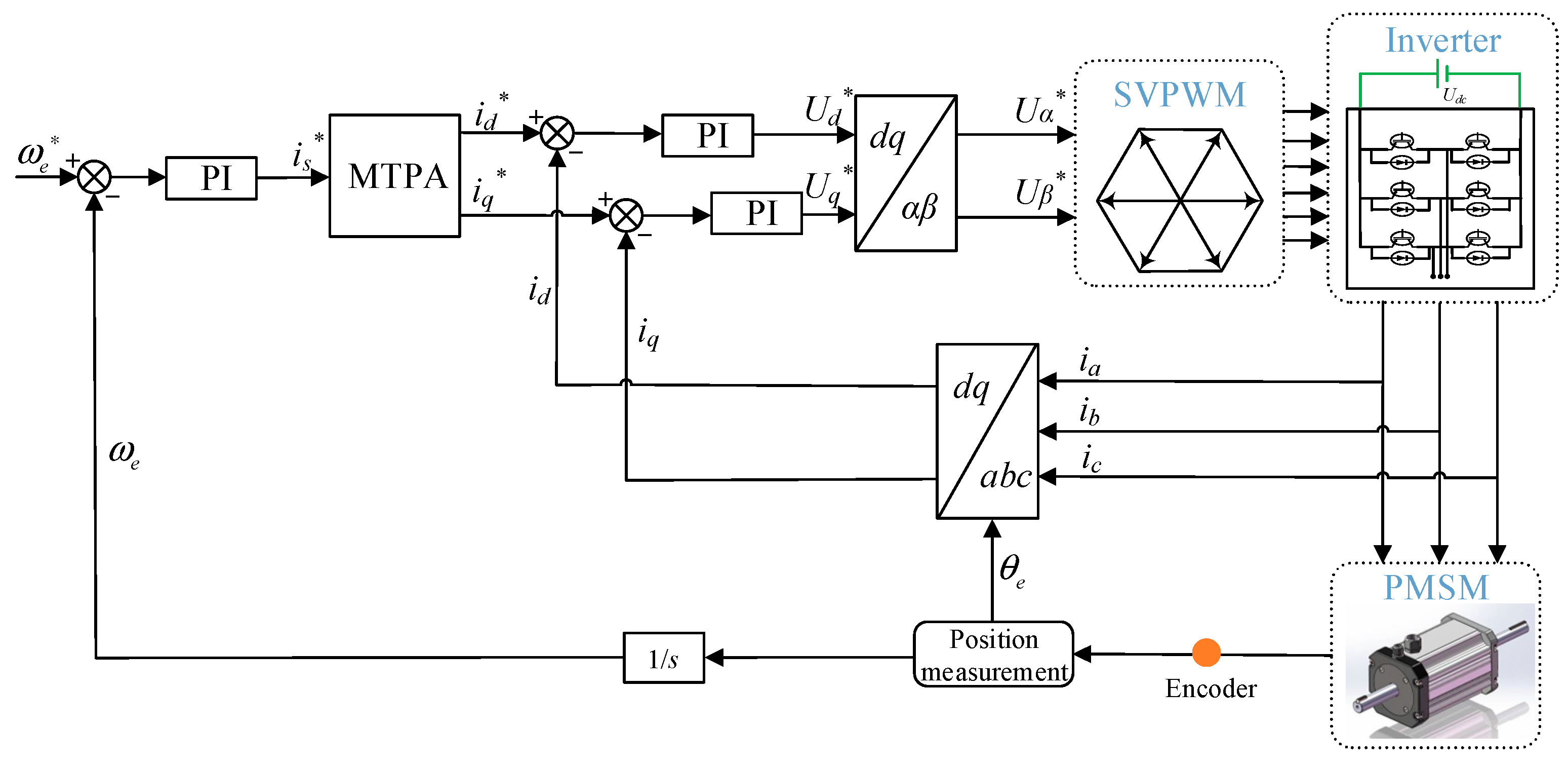
2.4. Vector Control Model for PMSM
2.5. Model of Gear System Dynamic of the DEDS
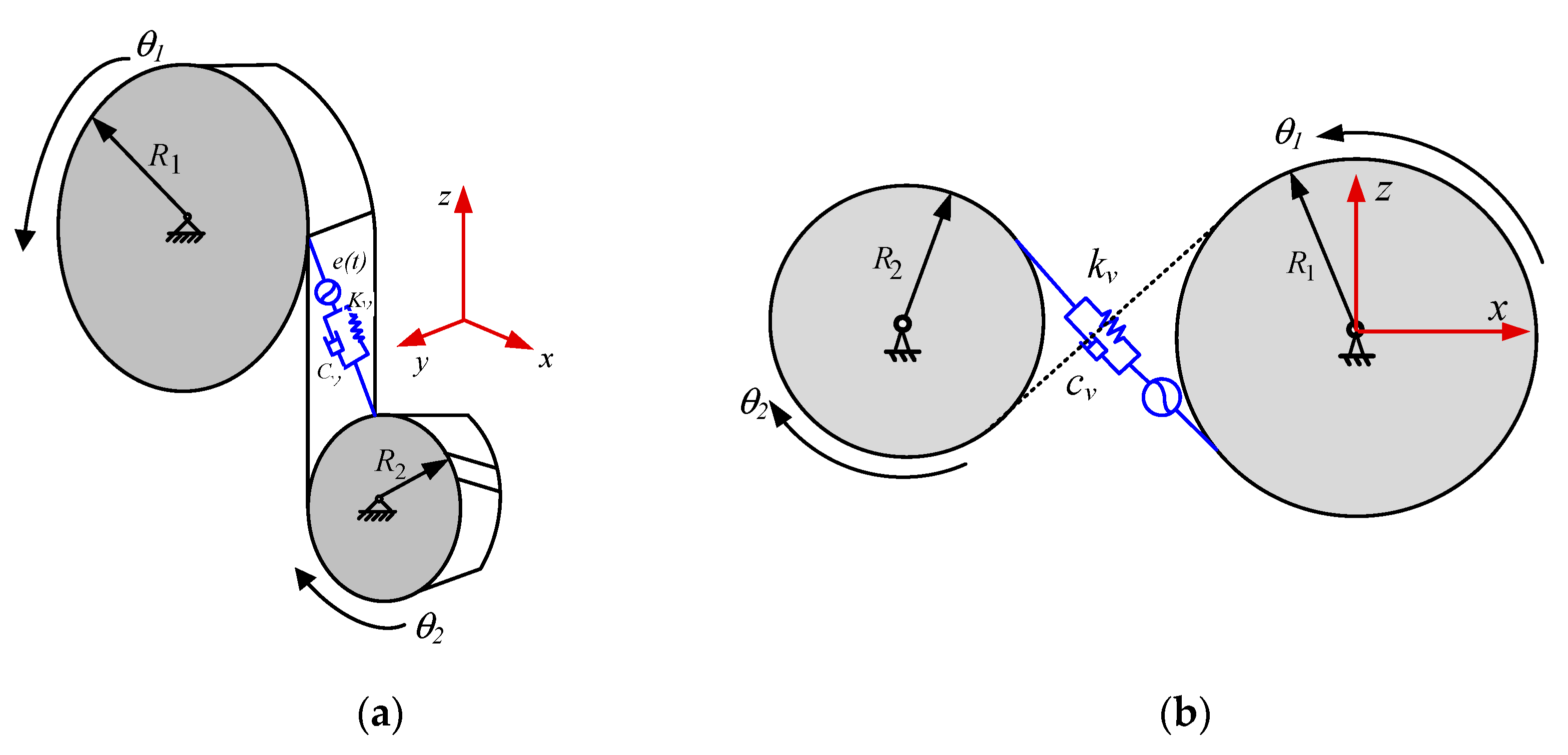
2.5.1. Model of Gear Pair Torsional Vibration
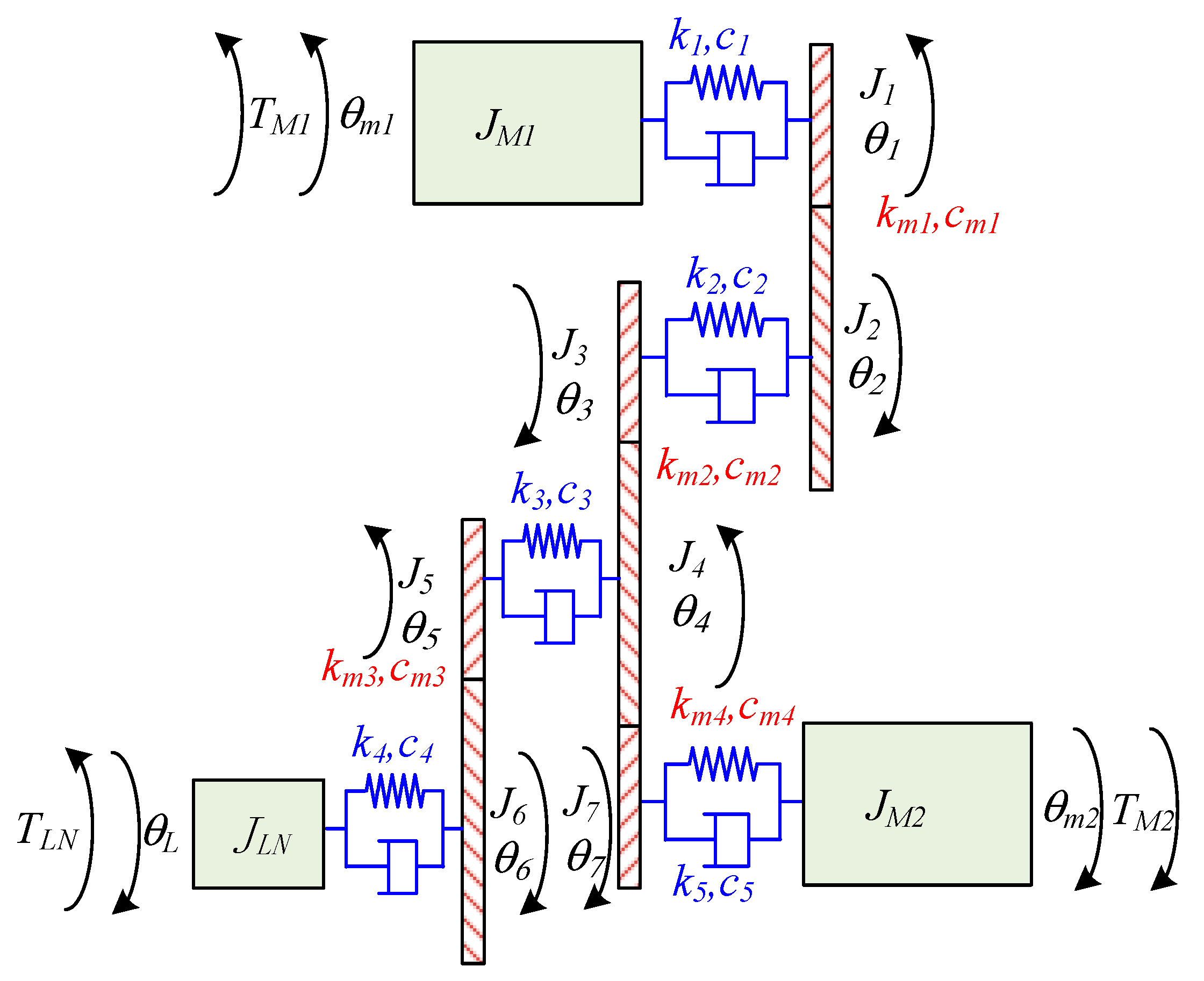
2.5.2. Dynamic Model of Transmission System
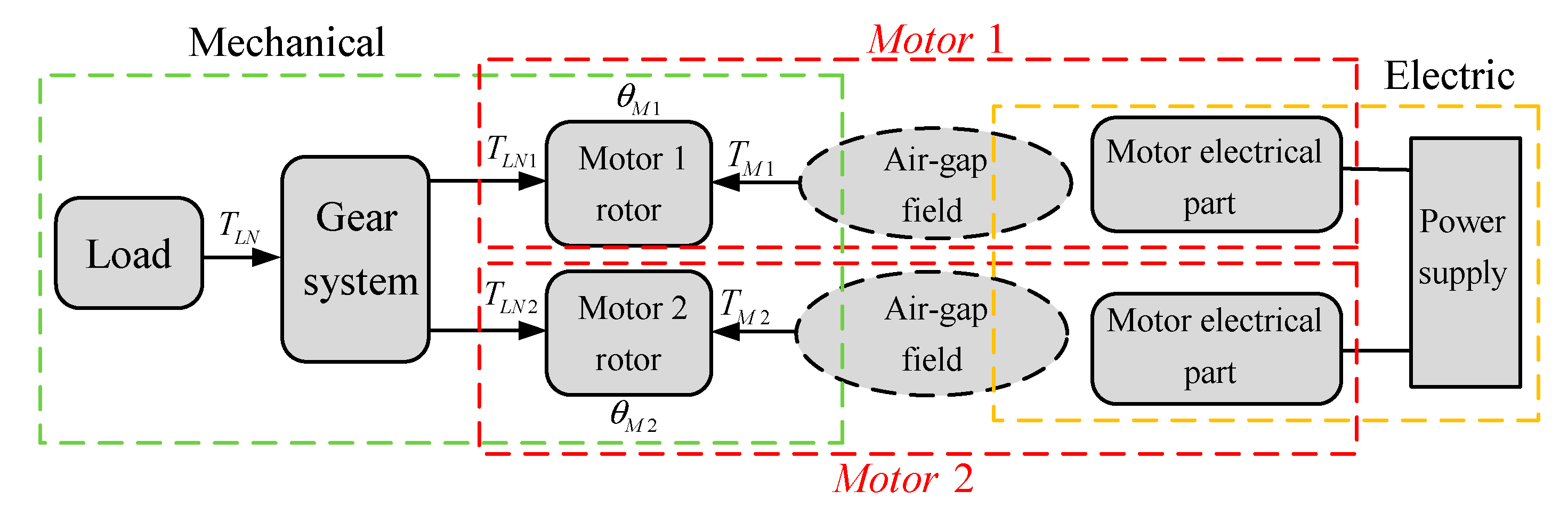
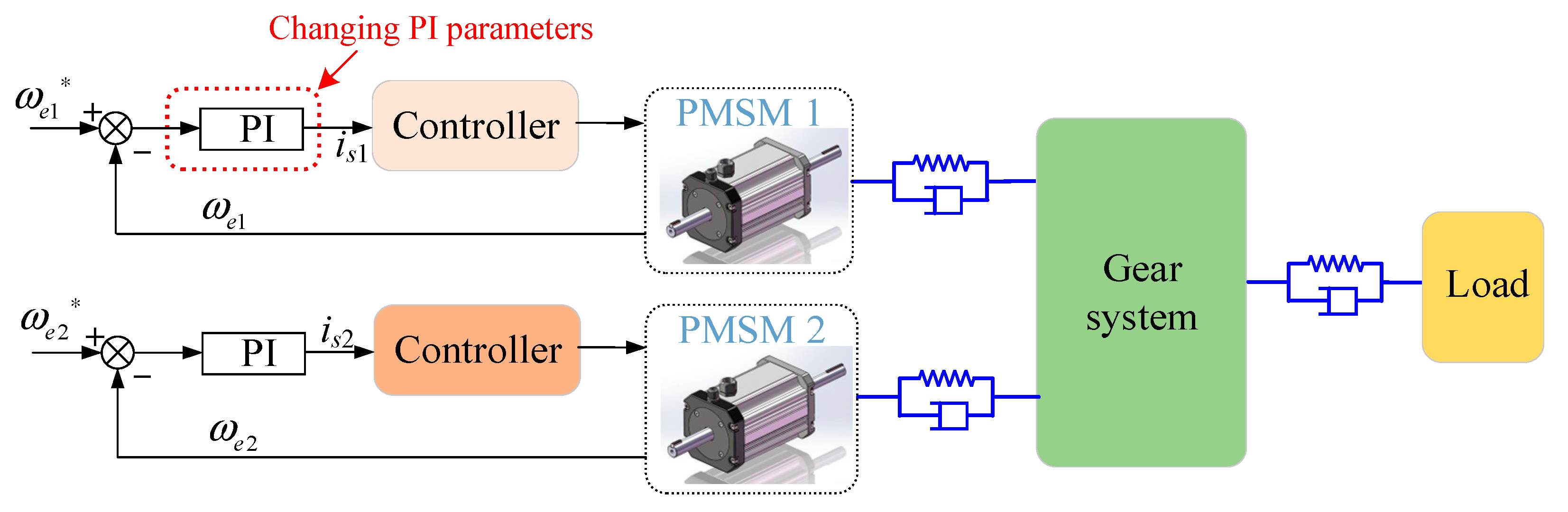
2.6. Electromechanical Coupling Model of the DEDS
2.7. Analysis of the Inherent Torsional Vibration Characteristics of the DEDS
3. Analysis of Electromechanical Coupling Dynamics of the DEDS under Steady-State Conditions
3.1. Single-Motor Drive Mode
3.2. Dual-Motor Drive Mode
4. Analysis of Electromechanical Coupling Dynamics of the DEDS under Impact Conditions
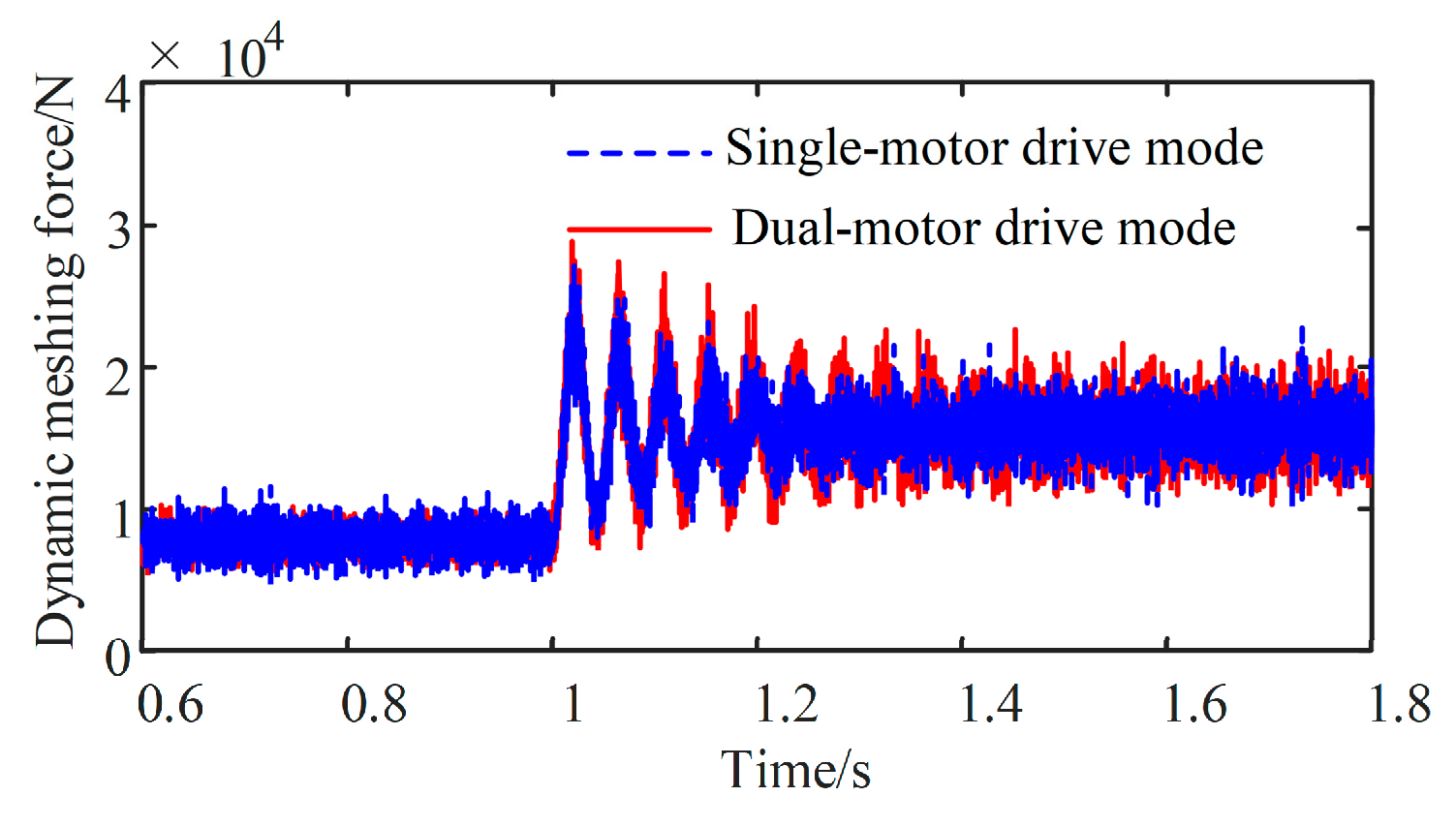
4.1. Single-Motor Drive Mode
4.2. Dual-Motor Drive Mode
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| HEV | Hybrid electric vehicle | ||
| DEDS | Dual-motor electric drive system | ||
| PMSM | Permanent magnet synchronous motor | ||
| DC | Direct current | ||
| IGBT | Insulated gate bipolar transistor | ||
| SVPWM | Space vector pulse width modulation | ||
| PWM | Pulse width modulation | ||
| PSD | Power spectral density | ||
| PI | Proportional integral | ||
| Formula Symbols | |||
| Stator voltage of the d axis | Stator voltage of the q axis | ||
| Stator current of the d axis | Stator current of the q axis | ||
| Flux linkage of the d axis | Flux linkage of the q axis | ||
| Electric angular velocity | Stator resistance | ||
| Power of PMSM | Rated speed of PMSM | ||
| Rated Torque of PMSM | Flux linkage of permanent magnets | ||
| Inductance component of the d axis | Inductance component of the q axis | ||
| Battery direct current voltage | Number of pole pairs | ||
| Electromagnetic torque of PMSM 1 | Electromagnetic torque of PMSM 2 | ||
| Dead time of the inverter | Delay time of the inverter | ||
| IGBT turn-on time | IGBT turn-off time | ||
| Average error voltage of A-phase bridge | Conduction voltage drops of freewheeling diode | ||
| Pulse width modulation cycle | Voltage drops of IGBT switch | ||
| Modulated wave frequency | Modulation carrier frequency | ||
| Target speed of the motor | Target current | ||
| Current instruction of the d axis | Current instruction of the q axis | ||
| Voltage instruction of the d axis | Voltage instruction of the d axis | ||
| Voltage instruction of the SVPWM | Voltage instruction of the SVPWM | ||
| Carrier frequency | Meshing displacement of the gear | ||
| Gear pair meshing stiffness | Gear pair meshing damping | ||
| Gear meshing error | b | Gear pair clearance | |
| Rotational inertia of motor 1 | Stiffness of shaft 1 | ||
| Rotational inertia of motor 2 | Stiffness of shaft 2 | ||
| Rotational inertia of gear 1 | Stiffness of shaft 3 | ||
| Rotational inertia of gear 2 | Stiffness of shaft 4 | ||
| Rotational inertia of gear 3 | Stiffness of shaft 5 | ||
| Rotational inertia of gear 4 | Meshing force of gear pair 1 | ||
| Rotational inertia of gear 5 | Meshing force of gear pair 2 | ||
| Rotational inertia of gear 6 | Meshing force of gear pair 3 | ||
| Rotational inertia of gear 7 | Meshing force of gear pair 4 | ||
| Rotational inertia of load | Rotation angle of gear 1 | ||
| Damping of shaft 1 | Rotation angle of gear 2 | ||
| Damping of shaft 2 | Rotation angle of gear 3 | ||
| Damping of shaft 3 | Rotation angle of gear 4 | ||
| Damping of shaft 4 | Rotation angle of gear 5 | ||
| Damping of shaft 5 | Rotation angle of gear 6 | ||
| Radius of gear 1 | Rotation angle of gear 7 | ||
| Radius of gear 2 | Rotation angle of motor 1 | ||
| Radius of gear 3 | Rotation angle of motor 2 | ||
| Radius of gear 4 | Load torque of system | ||
| Radius of gear 5 | Load torque of motor 1 | ||
| Radius of gear 6 | Load torque of motor 1 | ||
| Radius of gear 7 | Angular displacement matrix of system | ||
| Motor 1 to load transmission ratio | Motor 2 to load transmission ratio | ||
| Inertia matrix of system | Stiffness matrix of system | ||
| Damping matrix of system | Meshing damping of gears | ||
| Natural frequency of motor 1 drive mode of system | Natural frequency of motor 2 drive mode of system | ||
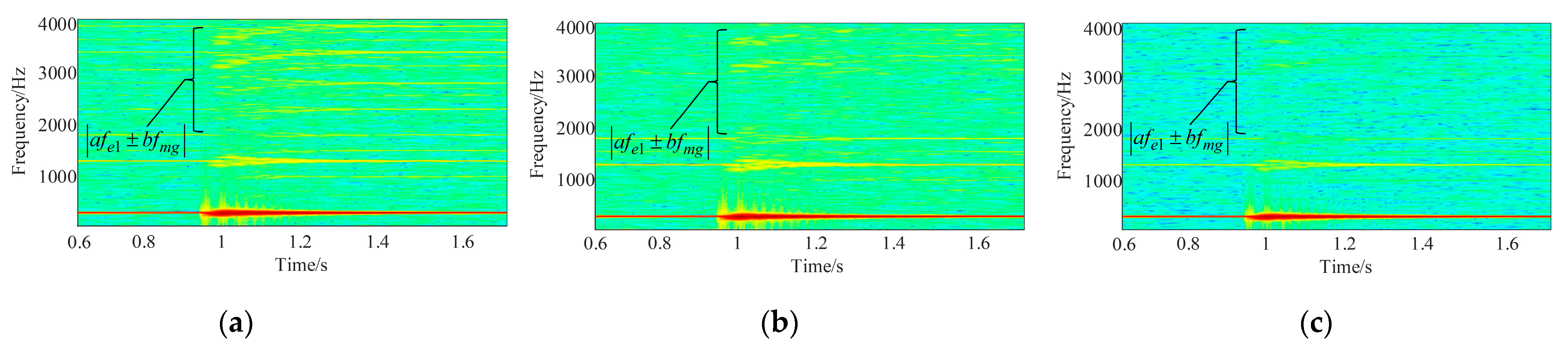
| Current frequencies of motor 1 | Current frequencies of motor 2 | ||
| Meshing frequency of gear pair 1 | Meshing frequency of gear pair 2 | ||
| Meshing frequency of gear pair 3 | Meshing frequency of gear pair 4 | ||
| Speed of motors 1 | Speed of motors 2 | ||
| Average speed of two motors | Ratio factor of the speed of the two motors | ||
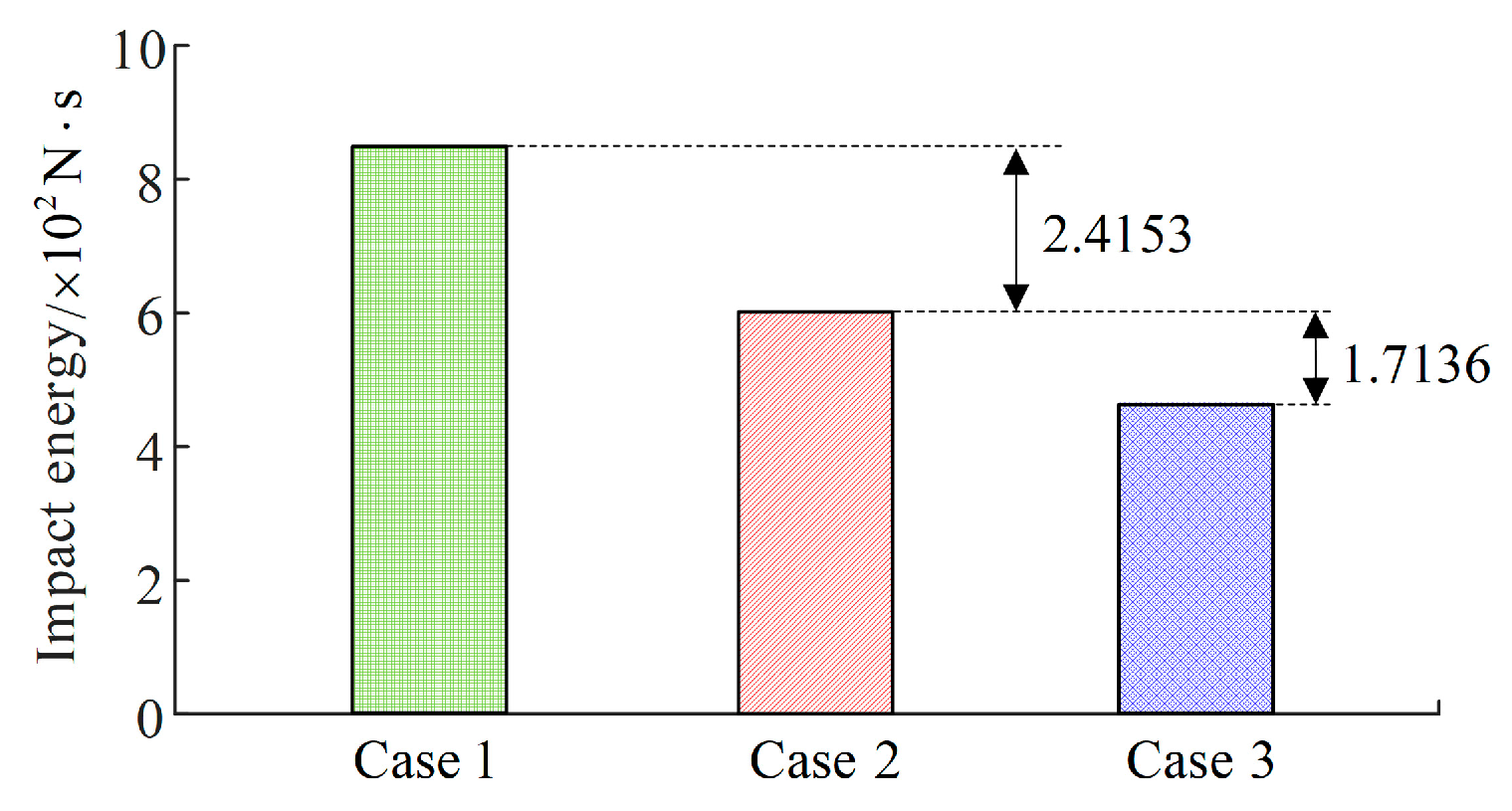
| Speed synchronization error | Impact energy | ||
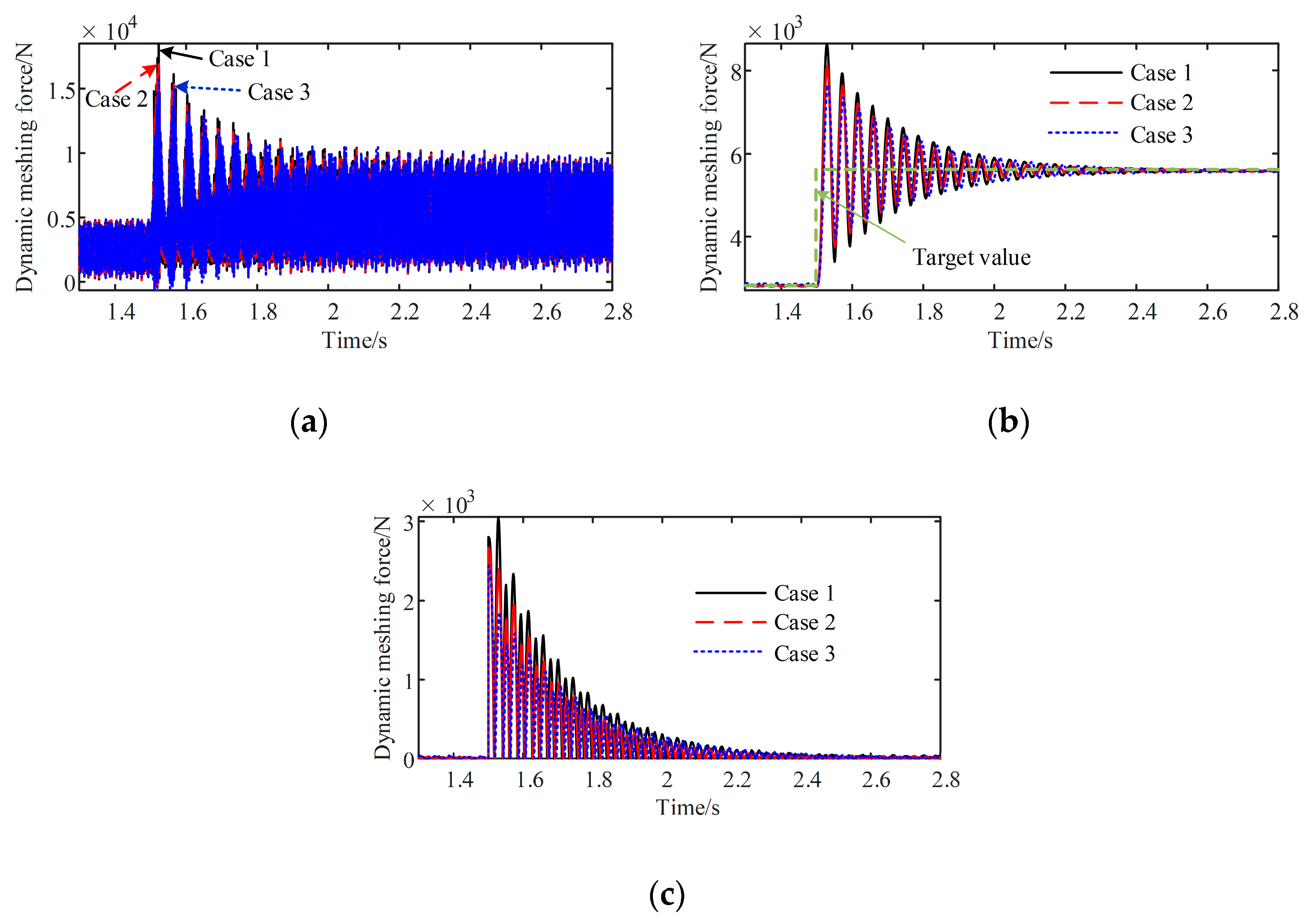
| Actual value of dynamic meshing force | Dynamic meshing force steady-state target value | ||
References
- Liu, Y.; Tang, D.; Ju, J. Electromechanical Coupling Dynamic and Vibration Control of Robotic Grinding System for Thin-Walled Workpiece. Actuators 2023, 12, 37. [Google Scholar] [CrossRef]
- Yi, Y.; Tan, X.; Xuan, L.; Liu, C. Dynamic Interaction Behavior of an Electric Motor Drive Multistage Gear Set. IEEE Access 2020, 8, 66951–66960. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, J.; Liu, C.; Wang, J.; Yao, D. Dynamic Characteristics of a Traction Drive System in High-Speed Train Based on Electromechanical Coupling Modeling under Variable Conditions. Energies 2022, 15, 1202. [Google Scholar] [CrossRef]
- Jiang, S.; Li, W.; Wang, Y.; Yang, X.; Xu, S. Study on Electromechanical Coupling Torsional Resonance Characteristics of Gear System Driven by PMSM: A Case on Shearer Semi-direct Drive Cutting Transmission System. Nonlinear Dyn. 2021, 104, 1205–1225. [Google Scholar] [CrossRef]
- Abouzeid, A.F.; Guerrero, J.M.; Vicente-Makazaga, I.; Muniategui-Aspiazu, I.; Endemano-Isasi, A.; Briz, F. Torsional Vibration Suppression in Railway Traction Drives. IEEE Access 2022, 10, 32855–32869. [Google Scholar] [CrossRef]
- Sheng, L.; Li, W.; Jiang, S.; Chen, J.; Liu, A. Nonlinear Torsional Vibration Analysis of Motor Rotor System in Shearer Semi-direct Drive Cutting Unit under Electromagnetic and Load Excitation. Nonlinear Dyn. 2019, 96, 1677–1691. [Google Scholar] [CrossRef]
- Li, Y.; Wu, H.; Xu, X.; Cai, Y.; Sun, X. Analysis on electromechanical coupling vibration characteristics of in-wheel motor in electric vehicles considering air gap eccentricity. Bull. Pol. Acad. Sci. Tech. Sci. 2019, 67, 851–862. [Google Scholar] [CrossRef]
- Hu, J.; Peng, T.; Jia, M.; Yang, Y.; Guan, Y. Study on Electromechanical Coupling Characteristics of an Integrated Electric Drive System for Electric Vehicle. IEEE Access 2019, 7, 166493–166508. [Google Scholar] [CrossRef]
- Chen, R.; Liu, C.; Qin, D. Electromechanical Dynamic Analysis of the Integrated System of Switched Reluctance Motor and Planetary Gear Transmission. J. Vib. Eng. Technol. 2022, 10, 581–599. [Google Scholar] [CrossRef]
- Huo, J.; Wu, H.; Sun, W.; Zhang, Z.; Wang, L.; Dong, J. Electromechanical Coupling Dynamics of TBM Main Drive System. Nonlinear Dyn. 2017, 90, 2687–2710. [Google Scholar] [CrossRef]
- Chen, X.; Han, S.; Li, J.; Deng, T.; Wei, H. Investigation of Electromechanical Coupling Lateral/torsional Vibration in a High-speed Rotating Continuous Flexible Shaft of PMSM. Appl. Math. Model. 2020, 77, 506–521. [Google Scholar] [CrossRef]
- Shi, X.; Sun, D.; Kan, Y.; Zhou, J.; You, Y. Dynamic Characteristics of a New Coupled Planetary Transmission under Unsteady Conditions. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 280. [Google Scholar] [CrossRef]
- Fan, W.; Yang, Y.; Su, X. Dynamic Modeling and Vibration Characteristics Analysis of Transmission Process for Dual-Motor Coupling Drive System. Symmetry 2020, 12, 1171. [Google Scholar] [CrossRef]
- Hu, C.; Tang, X.; Zou, L.; Yang, K.; Li, Y.; Zheng, L. Numerical and Experimental Investigations of Noise and Vibration Characteristics for a Dual-motor Hybrid Electric Vehicle. IEEE Access 2019, 7, 77052–77062. [Google Scholar] [CrossRef]
- Wang, W.; Li, Y.; Shi, J.; Lin, C. Vibration Control Method for an Electric City Bus Driven by a Dual Motor Coaxial Series Drive System Based on Model Predictive Control. IEEE Access 2018, 6, 41188–41200. [Google Scholar] [CrossRef]
- Yue, H.; He, H.; Han, M. Study on Torsional Vibration Characteristics and Suppression of Electric Vehicles with Dual-motor Drive System. J. Frankl. Inst. 2023, 360, 380–402. [Google Scholar] [CrossRef]
- Wei, J.; Shu, R.; Qin, D.; Lim, T.C.; Zhang, A. Study of Synchronization Characteristics of a Multi-source Driving Transmission System under an Impact Load. Int. J. Precis. Eng. Manuf. 2016, 17, 1157–1174. [Google Scholar] [CrossRef]
- Xiong, H.; Zhang, M.; Zhang, R. A New Synchronous Control Method for Dual Motor Electric Vehicle Based on Cognitive-inspired and Intelligent Interaction. Future Gener. Comput. Syst. 2019, 94, 536–548. [Google Scholar] [CrossRef]
- Wang, D.; Yang, F.; Jiang, X.; Shi, S.; Ma, S. Electromechanical Coupling Dynamic Characteristics of Differential Speed Regulation System Considering Inverter Harmonics under Variable Operating Conditions. IEEE Access 2022, 10, 12057–12069. [Google Scholar] [CrossRef]
- Han, L.; Wang, D.; Yang, F.; He, W. Vibration Characteristics of the Dual Electric Propulsion System of Vessels under Electromechanical Coupling Excitation. Machines 2022, 10, 449. [Google Scholar] [CrossRef]
- Zhang, Q.; Fan, Y. The Online Parameter Identification Method of Permanent Magnet Synchronous Machine under Low-Speed Region Considering the Inverter Nonlinearity. Energies 2022, 15, 4314. [Google Scholar] [CrossRef]
- Ge, S.; Qiu, L.; Zhang, Z.; Guo, D.; Ren, H. Integrated Impacts of Non-Ideal Factors on the Vibration Characteristics of Permanent Magnet Synchronous Motors for Electric Vehicles. Machines 2022, 10, 73. [Google Scholar] [CrossRef]
- Hu, J.; Yang, Y.; Jia, M.; Guan, Y.; Fu, C.; Liao, S. Research on Harmonic Torque Reduction Strategy for Integrated Electric Drive System in Pure Electric Vehicle. Electronics 2020, 9, 1241. [Google Scholar] [CrossRef]
- Chen, Z.; Ning, J.; Wang, K.; Zhai, W. An Improved Dynamic Model of Spur Gear Transmission Considering Coupling Effect between Gear Neighboring Teeth. Nonlinear Dyn. 2021, 106, 339–357. [Google Scholar] [CrossRef]
- Shu, R.; Wei, J.; Tan, R.; Wu, X.; Fu, B. Investigation of Dynamic and Synchronization Properties of a Multi-motor Driving System: Theoretical Analysis and Experiment. Mech. Syst. Signal Process. 2021, 153, 107496. [Google Scholar] [CrossRef]
- Li, M.; Yang, Y.; Hu, M.; Qin, D. Influence of Motor Control Characteristics on Load Sharing Behavior of Torque Coupling Gear Set. J. Vibroeng. 2016, 18, 4539–4549. [Google Scholar] [CrossRef] [Green Version]
- Zhu, E.; Pang, J.; Sun, N.; Gao, H.; Sun, Q.; Chen, Z. Airship Horizontal Trajectory Tracking Control Based on Active Disturbance Rejection Control (ADRC). Nonlinear Dyn. 2014, 75, 725–734. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Motor 1 | Motor 2 | |
| Power P (kW) Number of pole pairs Pn Rated speed n (rpm) Rated torque Te (Nm) Stator resistance R () D axis inductance Ld (mH) Q axis inductance Lq (mH) | 90 5 4000 214 0.012 0.196 0.149 | 80 5 4800 153 0.012 0.101 0.296 |
| Parameter | Value |
|---|---|
| Battery DC voltage udc (V) Modulation carrier period TPWM (us) Dead time td (us) IGBT turn-on time ton (us) IGBT turn-on time toff (us) The conduction voltage drops of freewheeling diode vd (V) | 450 100 4 1 2 2 |
| Voltage drops of IGBT switch vt (V) Modulation carrier frequency fc (kHz) | 3 10 |
| Parameter | Value |
|---|---|
| Stiffness (Nm/rad) | k1 = k5 = 1.2 × 106; k2 = k3 = 1 × 107; k4 = 8 × 103 |
| Damping (Nm s/rad) | c1= c5 = 4; c2= c3= c4 = 1.7 |
| Inertia (kg m2) | JM1 = 6.15 × 10−3; JM2 = 5.36 × 10−3; JLN = 0.36; J1 = 1.51 × 10−4; J2 = 1.32 × 10−3; J3 = 1.67 × 10−4; J4 = 7.2 × 10−3; J5 = 1.92 × 10−4; J6 = 1.2 × 10−2; J7 = 1.69 × 10−4 |
| Meshing damping cm | 100 |
| Transmission ratio r1 | 10.5 |
| Transmission ratio r2 | 8.75 |
| Order | 0 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|---|
| (Hz) | 0 | 22.1 | 56.4 | 159.2 | 255.3 | 734.8 |
| (Hz) | 0 | 23.3 | 58.6 | 159.2 | 255.3 | 734.8 |
| Working Mode | System Load Torque (Nm) | Motor Speed (rpm) | |
|---|---|---|---|
| Motor 1 | Motor 2 | ||
| Single-motor drive mode | 1155 | 3000 | / |
| Dual-motor drive mode | 1155 | 3000 | 2500 |
| Working Mode | System Load Torque (Nm) | Motor Speed (rpm) | ||
|---|---|---|---|---|
| Before Impact | After Impact | Motor 1 | Motor 2 | |
| Single-motor drive mode | 1155 | 2310 | 3000 | / |
| Dual-motor drive mode | 1155 | 2310 | 3000 | 2500 |
| Case Name | Damping (Nm∙s/rad) | Stiffness (Nm/rad) |
|---|---|---|
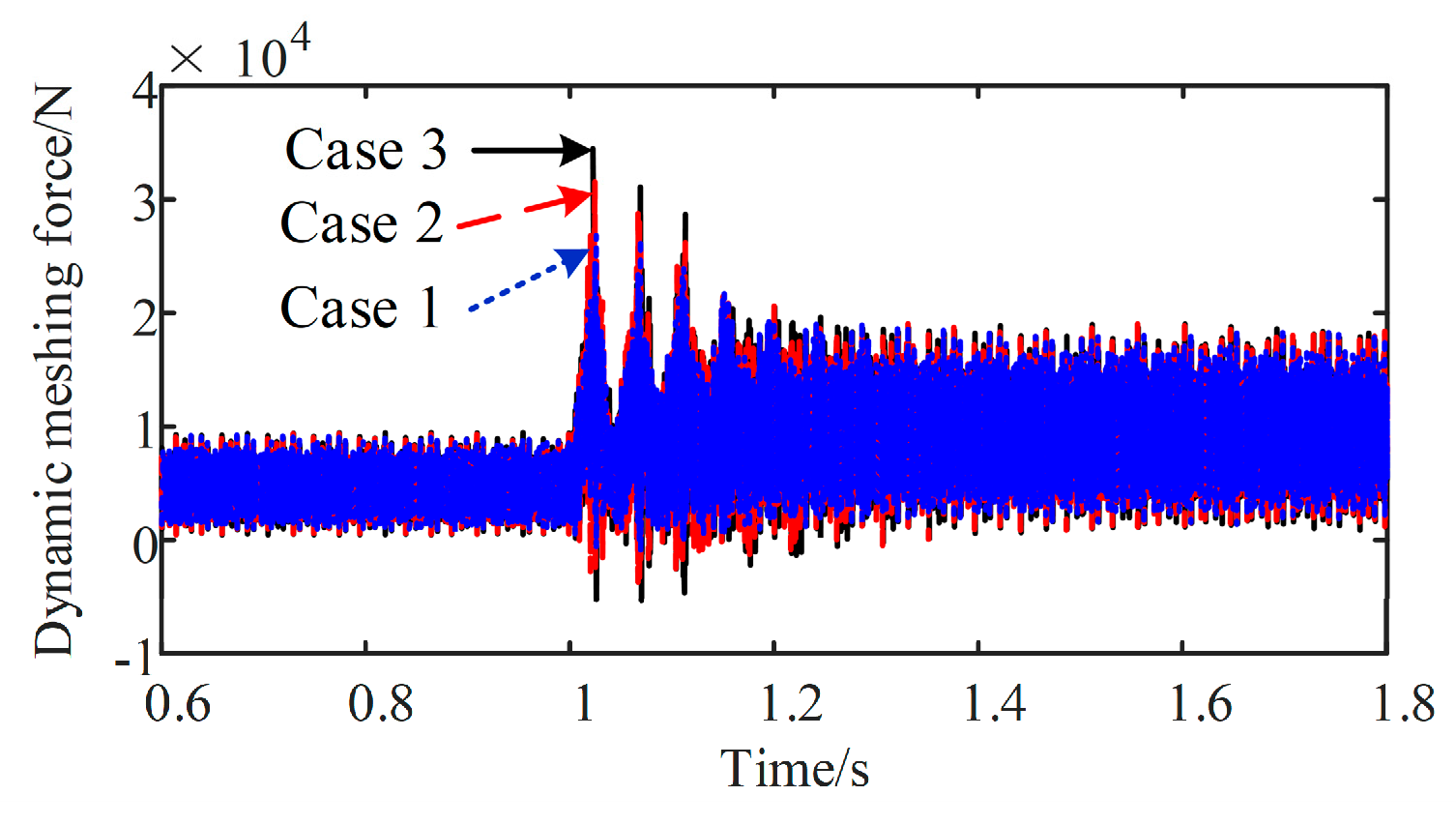
| Case 1 Case 2 Case 3 Case 4 | 4 4 4 40 | 103 104 105 105 |
| Case 5 | 400 | 105 |
| PI Parameter Combinations | |
|---|---|
| Case 1 Case 2 Case 3 | 8.4432 6.0279 4.8503 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, S.; Hou, S.; Yao, M. Electromechanical Coupling Dynamic Characteristics of the Dual-Motor Electric Drive System of Hybrid Electric Vehicles. Energies 2023, 16, 3190. https://doi.org/10.3390/en16073190
Ge S, Hou S, Yao M. Electromechanical Coupling Dynamic Characteristics of the Dual-Motor Electric Drive System of Hybrid Electric Vehicles. Energies. 2023; 16(7):3190. https://doi.org/10.3390/en16073190
Chicago/Turabian StyleGe, Shuaishuai, Shuang Hou, and Mingyao Yao. 2023. "Electromechanical Coupling Dynamic Characteristics of the Dual-Motor Electric Drive System of Hybrid Electric Vehicles" Energies 16, no. 7: 3190. https://doi.org/10.3390/en16073190
APA StyleGe, S., Hou, S., & Yao, M. (2023). Electromechanical Coupling Dynamic Characteristics of the Dual-Motor Electric Drive System of Hybrid Electric Vehicles. Energies, 16(7), 3190. https://doi.org/10.3390/en16073190