

An Influence of Spatial Harmonics on an Electromagnetic Torque of a Symmetrical Six-Phase Induction Machine


Abstract
:1. Introduction
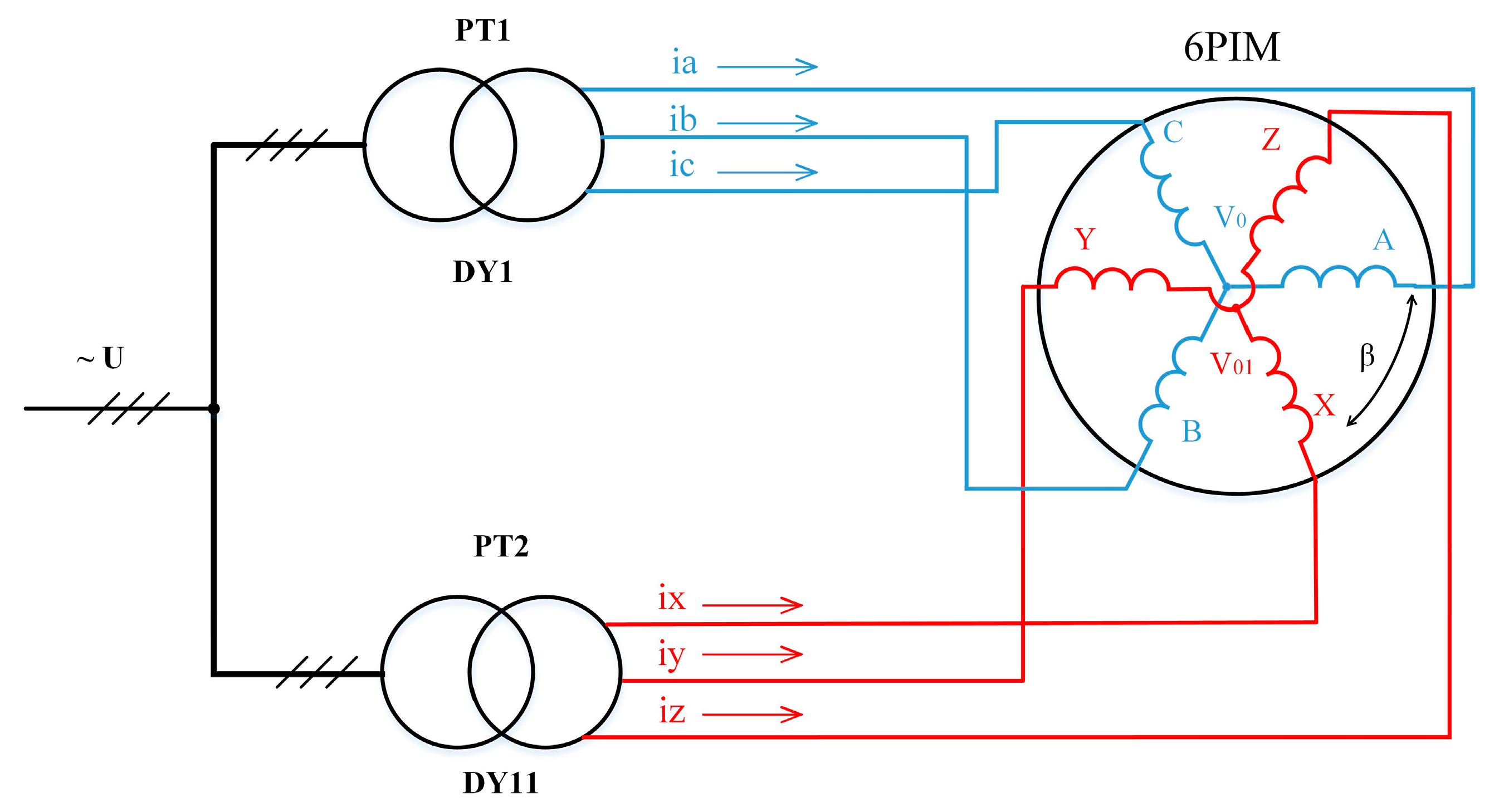
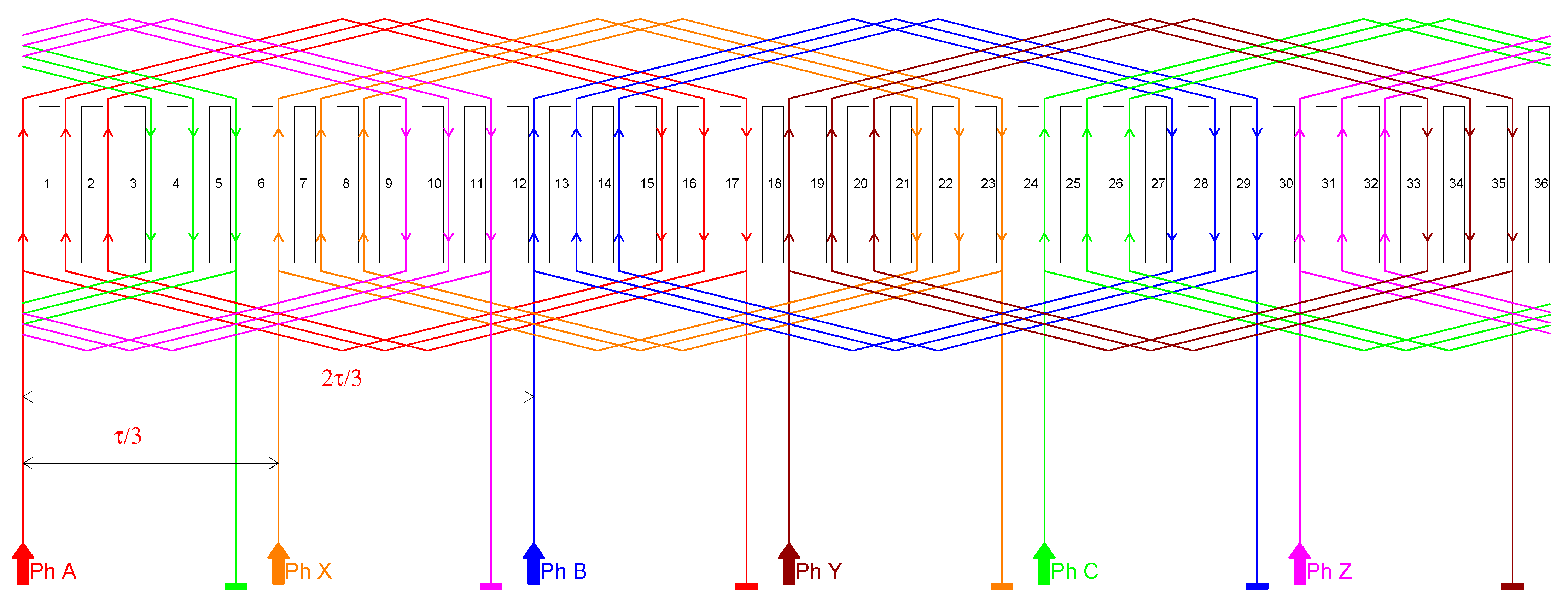
2. An Analytical Description of the 6PIM MMF and Electromagnetic Torque Taking into Account Spatial Harmonics
3. Mathematical Model Description of Symmetrical 6PIM Taking into Account Spatial Harmonics
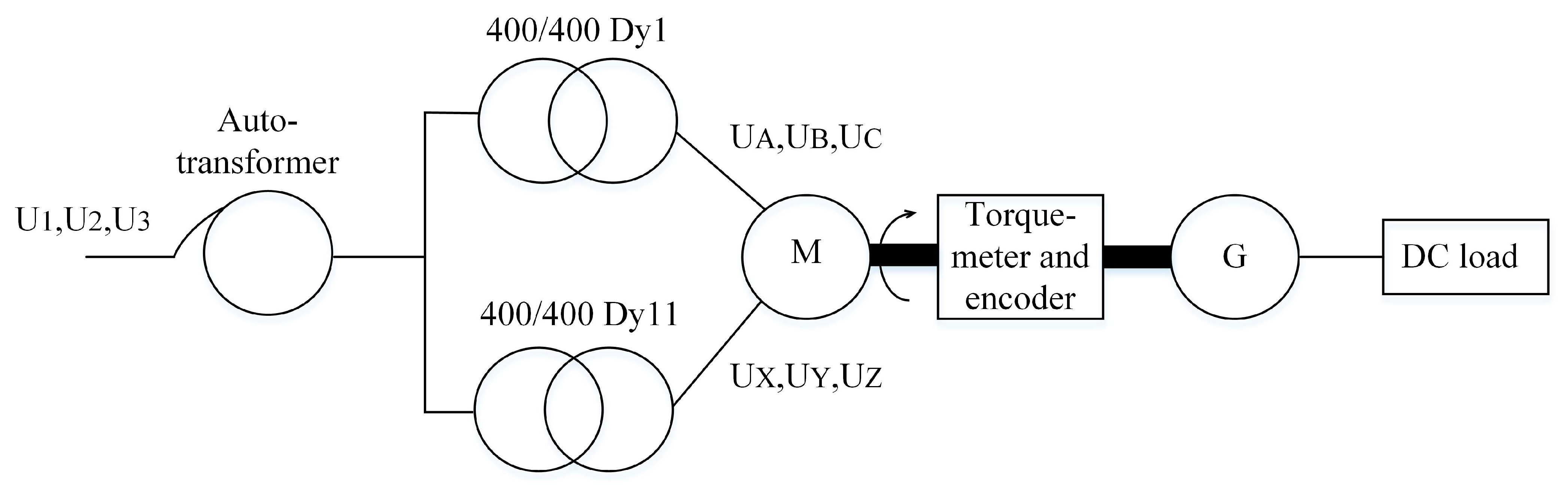
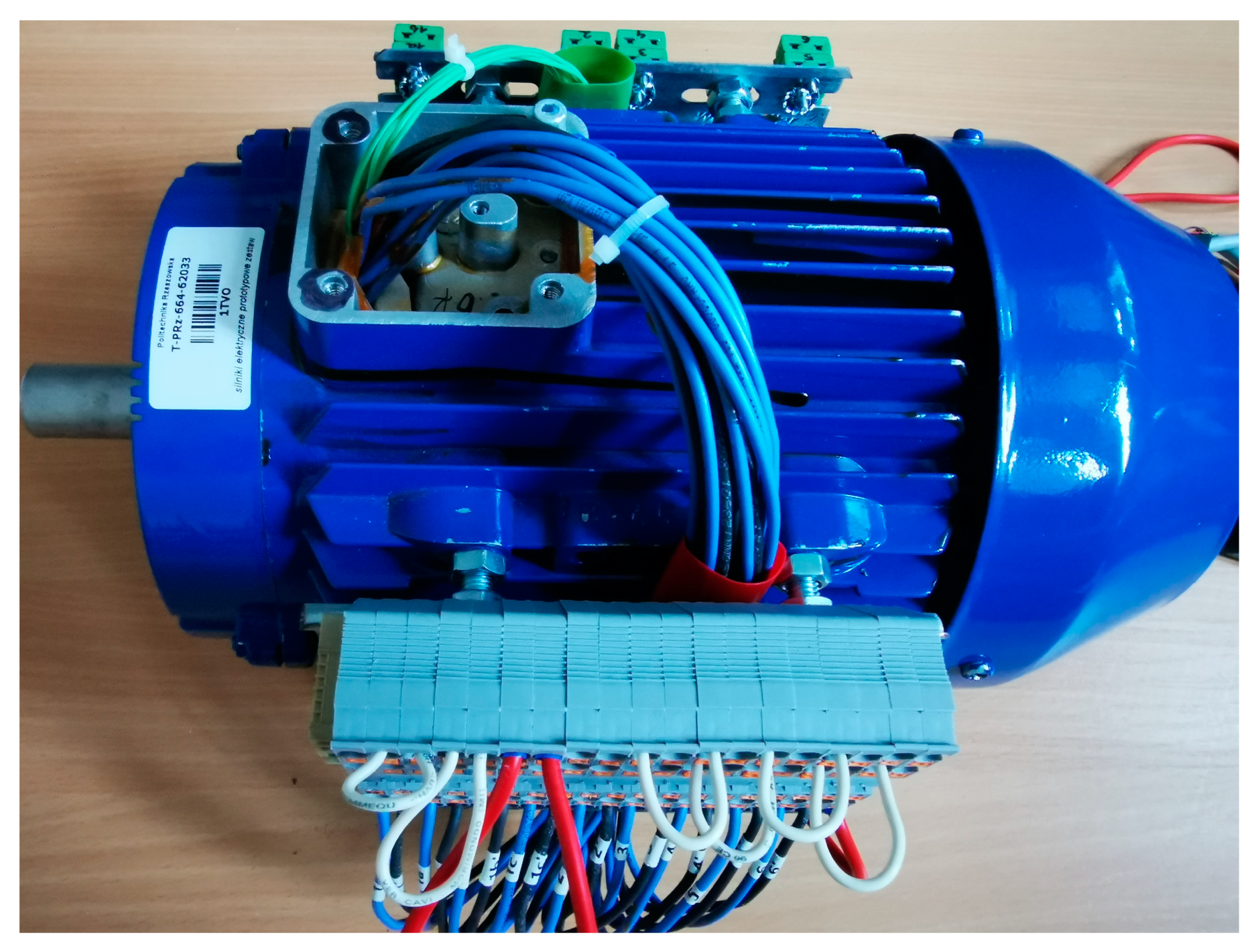
4. Experimental Test Bench
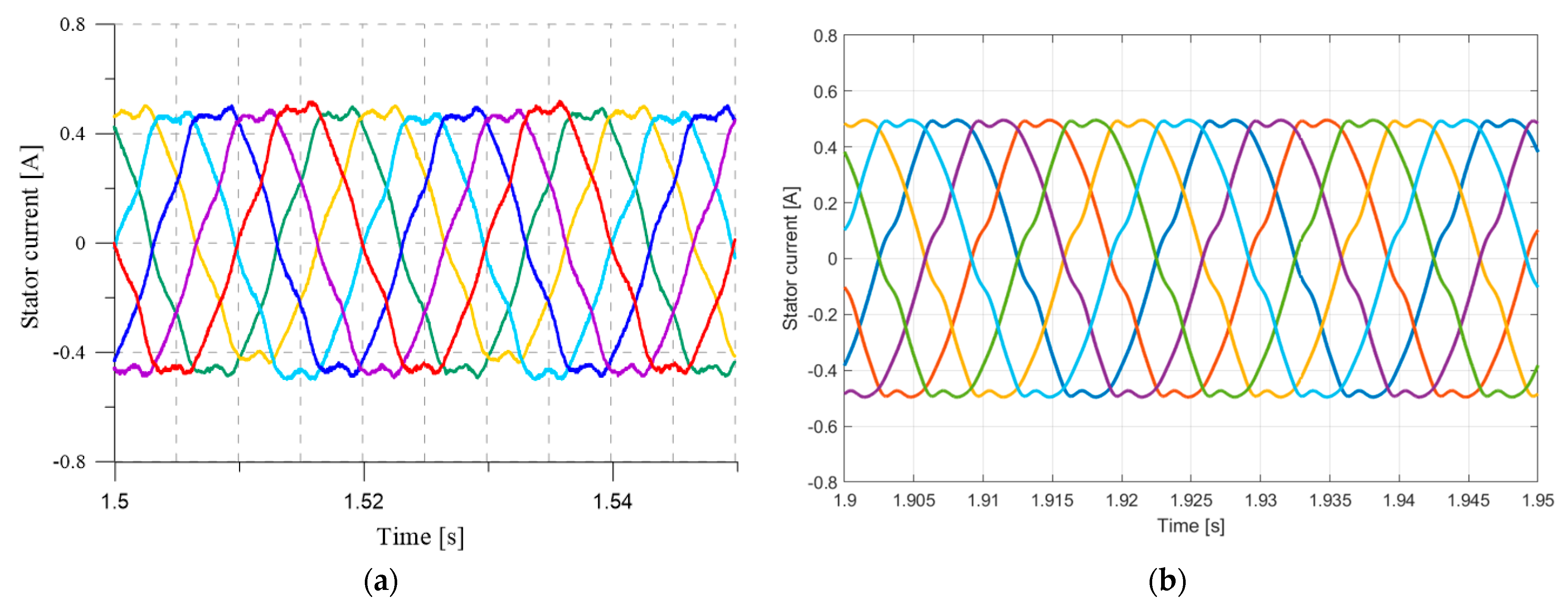
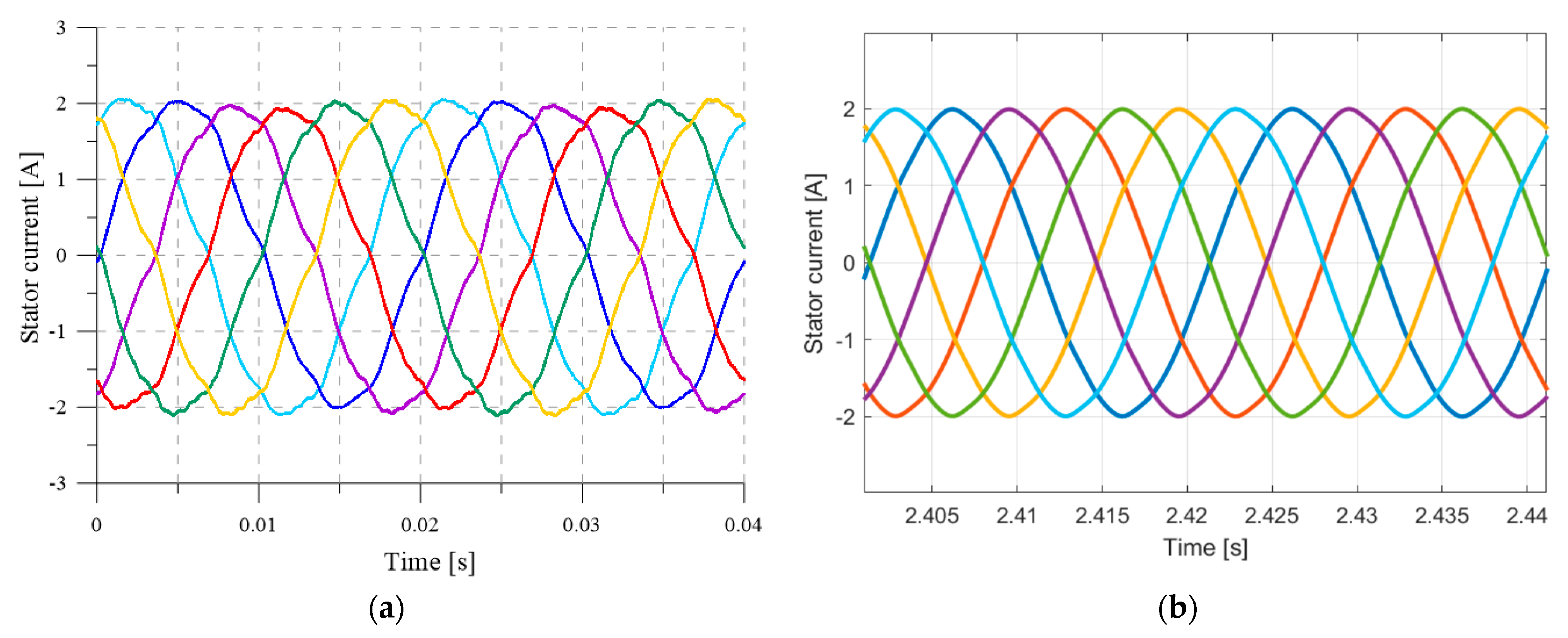
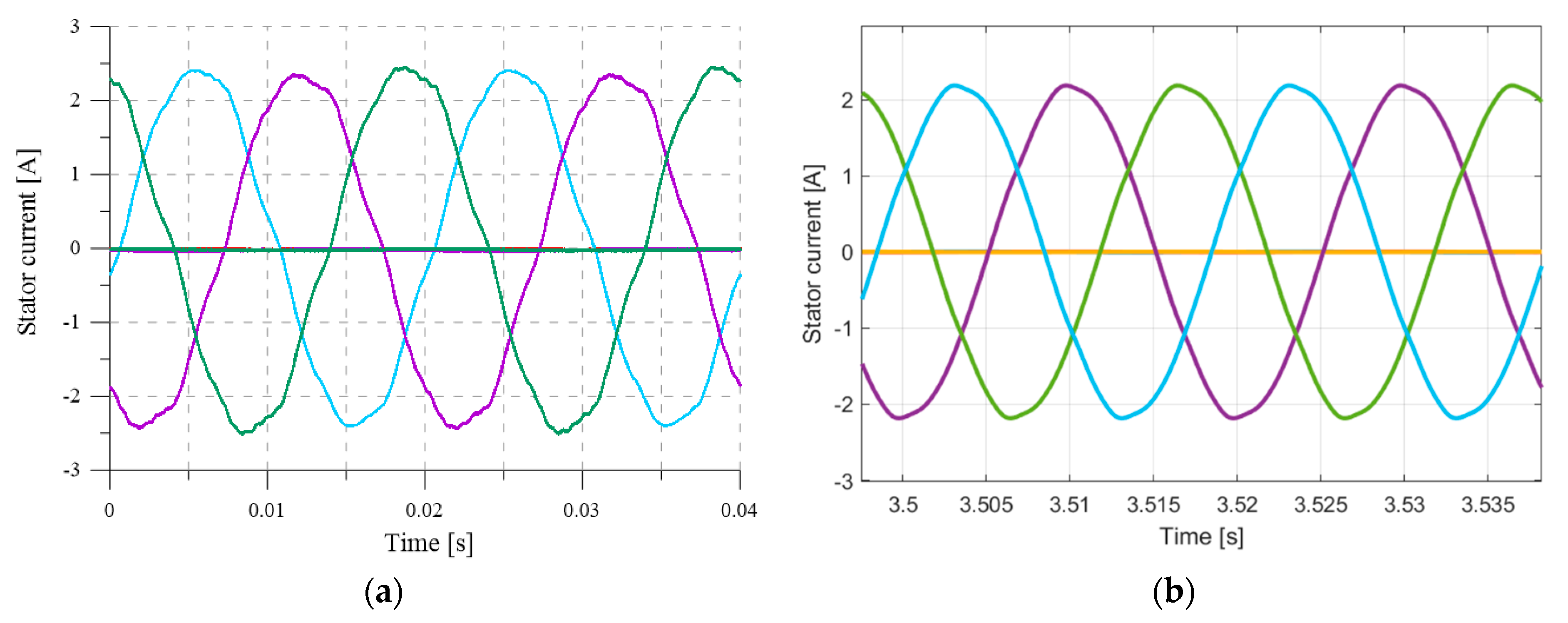
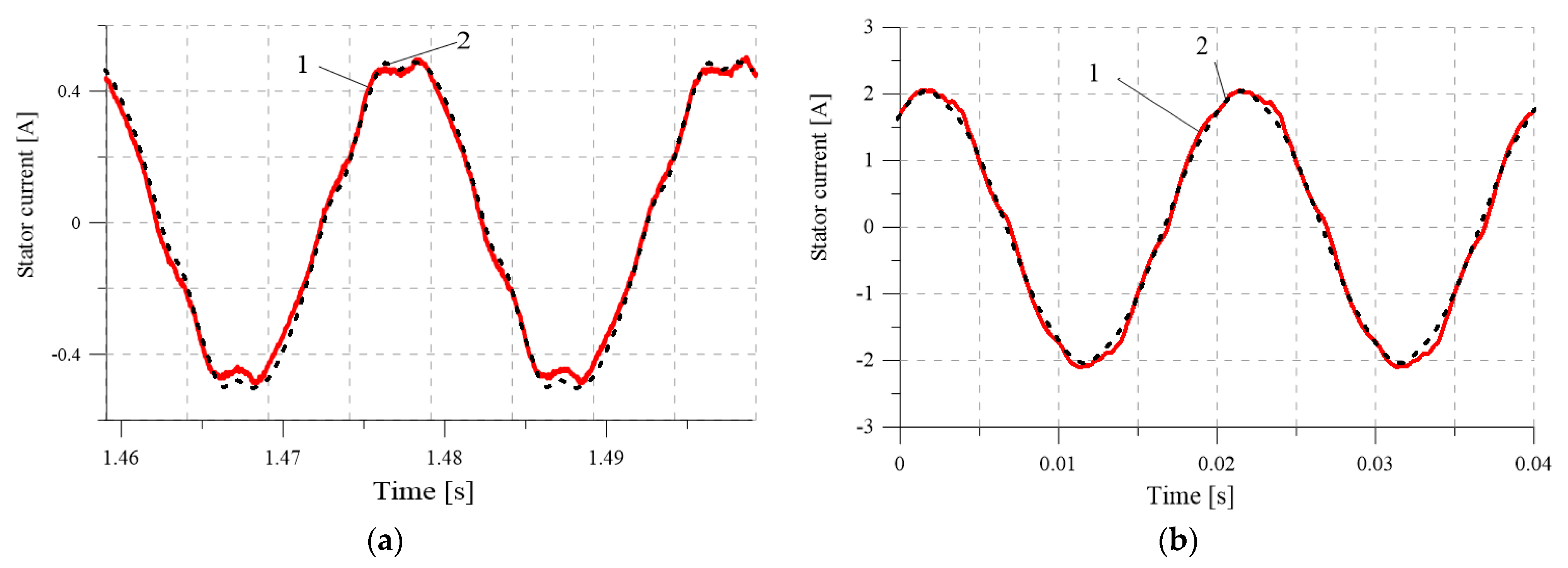
5. Experimental and Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Levi, E. Editorial—Special Issue on Multi-Phase Motor Drives. EPE J. 2004, 14, 4. [Google Scholar]
- Levi, E. Advances in converter control and innovative exploitation of additional degrees of freedom for multiphase machines. IEEE Trans. Ind. Electron. 2016, 63, 433–448. [Google Scholar] [CrossRef]
- Shchur, I.; Jancarczyk, D. Electromagnetic Torque Ripple in Multiple Three-Phase Brushless DC Motors for Electric Vehicles. Electronics 2021, 10, 3097. [Google Scholar] [CrossRef]
- Barrero, F.; Duran, M.J. Recent advances in the design, modeling and control of multiphase machines—Part 1. IEEE Trans. Ind. Electron. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Bojoi, R.; Farina, F.; Profumo, F.; Tenconi, A. Dual-Three Phase Induction Machine Drives Control—A Survey. IEEJ Trans. Ind. Appl. 2006, 126, 420–429. [Google Scholar] [CrossRef]
- Levi, E.; Barrero, F.; Duran, M.J. Multiphase machines and drives—Revisited. IEEE Trans. Ind. Electron. 2016, 63, 429–432. [Google Scholar] [CrossRef]
- Bojoi, R.; Caponet, M.C.; Grieco, G.; Lazzari, M.; Tenconi, A.; Profumo, F. Computation and measurements of the DC link current in six-phase voltage source PWM inverters for AC motor drives. In Proceedings of the Power Conversion Conference, Osaka, Japan, 2–5 April 2002; pp. 953–958. [Google Scholar] [CrossRef]
- Levi, E. Multiphase Electric Machines for Variable-Speed Applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Guzman, H.; Gonzalez, I.; Barrero, F.; Durán, M. Open-Phase Fault Operation on Multiphase Induction Motor Drives. Induction Motors—Applications, Control and Fault Diagnostics; IntechOpen: London, UK, 2015. [Google Scholar] [CrossRef]
- Munim, W.N.W.A.; Duran, M.J.; Che, H.S.; Bermúdez, M.; González-Prieto, I.; Rahim, N.A. A Unified Analysis of the Fault Tolerance Capability in Six-Phase Induction Motor Drives. IEEE Trans. Power Electron. 2017, 32, 7824–7836. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H.; Diallo, D.; Zeraoulia, M. Advanced Fault-Tolerant Control of Induction-Motor Drive for EV/HEV Traction Applications: From Conventional to Modern and Intelligent Control Techniques. IEEE Trans. Veh. Tech. 2007, 56, 519–528. [Google Scholar] [CrossRef]
- Gan, C.; Li, X.; Yu, Z.; Ni, K.; Wang, S.; Qu, R. Modular Seven-Leg Switched Reluctance Motor Drive With Flexible Winding Configuration and Fault-Tolerant Capability. IEEE Trans. Transp. Electrif. 2022. [Google Scholar] [CrossRef]
- Xiaodong, L.; Yilmaz, L. Harmonic analysis for induction motors. In Proceedings of the IEEE CCECE/CCGEIJ, Ottawa, ON, Canada, 7–10 May 2006; pp. 172–176. [Google Scholar] [CrossRef]
- Park, S.-H.; Chin, J.-W.; Cha, K.-S.; Ryu, J.-Y.; Lim, M.-S. Investigation of AC Copper Loss Considering Effect of Field and Armature Excitation on IPMSM With Hairpin Winding. In Proceedings of the IEEE Transactions on Industrial Electronics, Singapore, 16–19 October 2023. [Google Scholar] [CrossRef]
- Kabir, M.A.; Jaffar, M.Z.M.; Wan, Z.; Husain, I. Design and experimental evaluation of a multilayer AC winding configuration for sinusoidal MMF with shorter end-turn length. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition, Cincinnati, OH, USA, 1–5 October 2017; pp. 5834–5839. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Lipo, T.A. Analysis of concentrated winding induction machines for adjustable speed drive applications-experimental results. IEEE Trans. Energy Convers. 1994, 9, 695–700. [Google Scholar] [CrossRef]
- El-Refaie, A.M.; Shah, M.R. Comparison of Induction Machine Performance with Distributed and Fractional-Slot Concentrated Windings. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AL, Canada, 5–9 October 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Neto, L.M.; Camacho, J.R.; Salerno, C.H.; Alvarenga, B.P. Analysis of a three-phase induction machine including time and space harmonic effects: The a, b, c reference frame. IEEE Trans. Energy Convers 1999, 14, 80–85. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Masoud, M.I.; Ahmed, S.; Massoud, A.M. Effect of Current Harmonic Injection on Constant Rotor Volume Multiphase Induction Machine Stators: A Comparative Study. IEEE Trans. Ind. Appl. 2012, 48, 2002–2013. [Google Scholar] [CrossRef]
- Stincescu, R.B.; Viarouge, P.; Cros, J.; Kamwa, I. A general approach of space and time harmonics interactions in induction motors. In Proceedings of the IEEE International Electric Machines and Drives Conference, Hartford, CO, USA, 17–20 May 1999; pp. 366–368. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Martinez-Roman, J.; Puche-Panadero, R.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. Induction machine model with space harmonics for the diagnosis of rotor eccentricity, based on the convolution theorem. Int. J. Electr. Power Energy Syst. 2020, 117, 105625. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Martinez-Roman, J.; Puche-Panadero, R.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. Induction machine model with space harmonics for fault diagnosis based on the convolution theorem. Int. J. Electr. Power Energy Syst. 2018, 100, 463–481. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.; Deng, W. Impact of rotor eccentricity on electromagnetic vibration and noise of permanent magnet synchronous motor. J. Vibroeng. 2018, 20, 923–935. [Google Scholar] [CrossRef]
- Kutsyk, A.; Korkosz, M.; Semeniuk, M.; Bogusz, P.; Lozynskyy, A.; Kozyra, J.; Łukasik, Z. Electromagnetic and Electromechanical Compatibility Improvement of a Multi-Winding Switch Control-Based Induction Motor—Theoretical Description and Mathematical Modeling. Energies 2022, 15, 8038. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Gonzalez-Prieto, I.; Yepes, A.G.; Duran, M.J.; Doval-Gandoy, J. Symmetrical Six-Phase Induction Machines: A Solution for Multiphase Direct Control Strategies. In Proceedings of the 22nd IEEE International Conference on Industrial Technology, Shanghai, China, 22–25 August 2021; pp. 1362–1367. [Google Scholar] [CrossRef]
- Vukosavic, S.N.; Jones, M.; Levi, E.; Varga, J. Rotor fux oriented control of a symmetrical six-phase induction machine. Electr. Power Syst. Res. 2005, 75, 142–152. [Google Scholar] [CrossRef]
- Nabi, H.P.; Dadashi, P.; Shoulaie, A. A novel structure for vector control of a symmetrical six-phase induction machine with three current sensors. In Proceedings of the 10th International Conference on Environment and Electrical Engineering, Rome, Italy, 8–11 May 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Mezani, S.; Laporte, B.; Takorabet, N. Complex finite element computation of induction motors with consideration of space harmonics. In Proceedings of the IEEE International Electric Machines and Drives Conference, Madison, MI, USA, 1–4 June 2003; Volume 1, pp. 264–268. [Google Scholar] [CrossRef]
- Oliveira, F.T.; Donsion, M.P. A finite element model of an induction motor considering rotor skew and harmonics. Renew. Energy Power Qual. J. 2017, 15, 119–122. [Google Scholar] [CrossRef]
- Carbonieri, M.; Bianchi, N.; Alberti, L. Induction motor mapping using rotor field-oriented analysis technique. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition, Baltimore, ML, USA, 29 September–3 October 2019; pp. 2321–2328. [Google Scholar] [CrossRef]
- Leonardo, L.D.; Popescu, M.; Tursini, M.; Parasiliti, F.; Carbonieri, M. Transient Modeling of Induction Motors considering Space Harmonics. In Proceedings of the 2020 International Conference on Electrical Machines, Gothenburg, Sweden, 23–26 August 2020; pp. 2553–2559. [Google Scholar] [CrossRef]
- Plakhtyna, O.; Kutsyk, A.; Lozynskyy, A. Method of average voltages in integration step: Theory and application. Electr. Eng. 2020, 102, 2413–2422. [Google Scholar] [CrossRef]
- Plakhtyna, O.; Kutsyk, A.; Semeniuk, M. An analysis of fault modes in an electrical power-generation system on a real-time simulator with a real automatic excitation controller of a synchronous generator. Elektrotehniski Vestn. Electrotech. Rev. 2019, 86, 104–109. [Google Scholar]
- Kutsyk, A.; Lozynskyy, A.; Vantsevitch, V.; Plakhtyna, O.; Demkiv, L. A Real-Time Model of Locomotion Module DTC Drive for Hardware-In-The-Loop Implementation. Przegląd Elektrotechniczny 2021, 97, 60–65. [Google Scholar] [CrossRef]
- Kuznyetsov, O. Mathematical model of a three-phase induction machine in a natural abc reference frame utilizing the method of numerical integration of average voltages at the integration step and its application to the analysis of electromechanical systems. Math. Probl. Eng. 2019, 2019, 4581769. [Google Scholar] [CrossRef]
- Kłosowski, Z. The analysis of the possible use of wind turbines for voltage stabilization in the power node of MV line with the use of a real-time simulator. Przegląd Elektrotechniczny 2015, 1, 20–27. (In Polish) [Google Scholar]
- Kutsyk, A.; Semeniuk, M.; Korkosz, M.; Podskarbi, G. Diagnosis of the Static Excitation Systems of Synchronous Generators with the Use of Hardware-In-the-Loop Technologies. Energies 2021, 14, 6937. [Google Scholar] [CrossRef]
- Lozynskyy, A.; Kozyra, J.; Łukasik, Z.; Ku´smi´nska-Fijałkowska, A.; Kutsyk, A.; Paranchuk, Y.; Kasha, L. A Mathematical Model of Electrical Arc Furnaces for Analysis of Electrical Mode Parameters and Synthesis of Controlling Influences. Energies 2022, 15, 1623. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
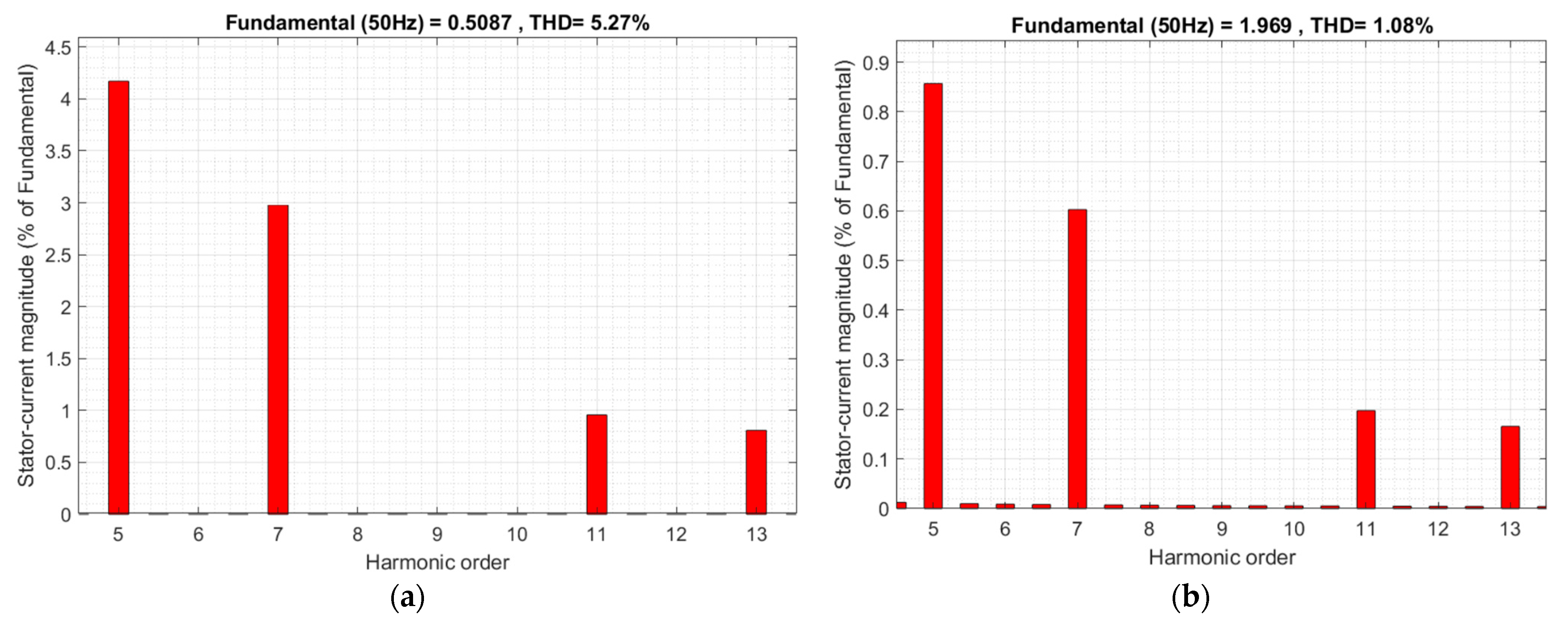
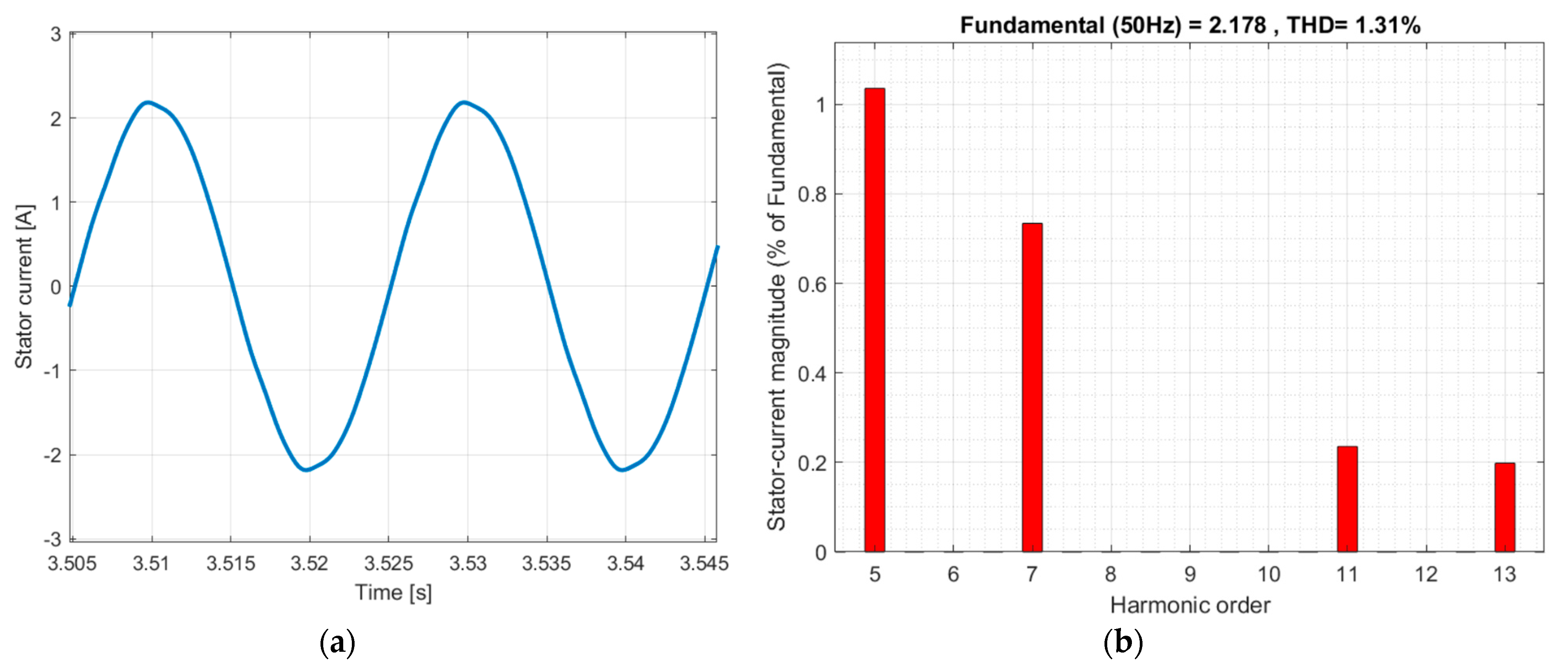
| Harmonic Order | Stator Current Harmonic Magnitude, % | Electromagnetic Torque Harmonic Magnitude, % |
|---|---|---|
| 0 | 0 | 100 |
| 1 | 100 | 0 |
| 5 | 4.17 | 0 |
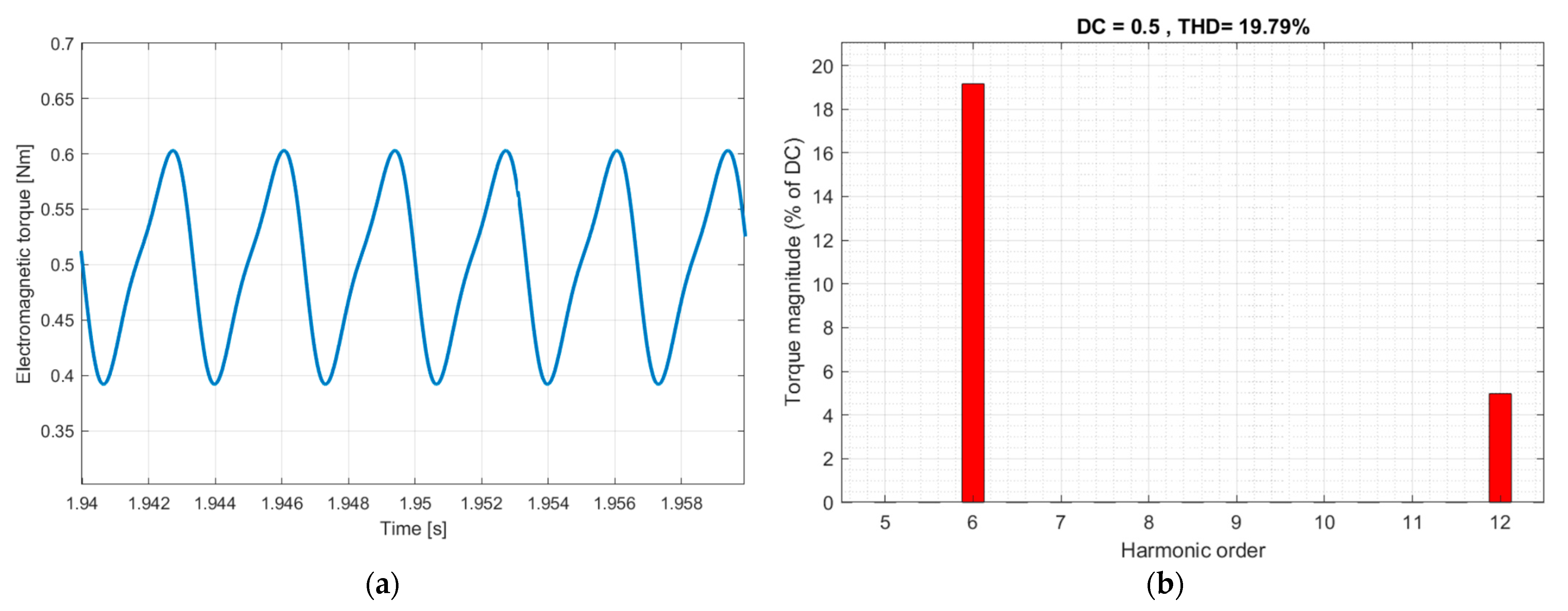
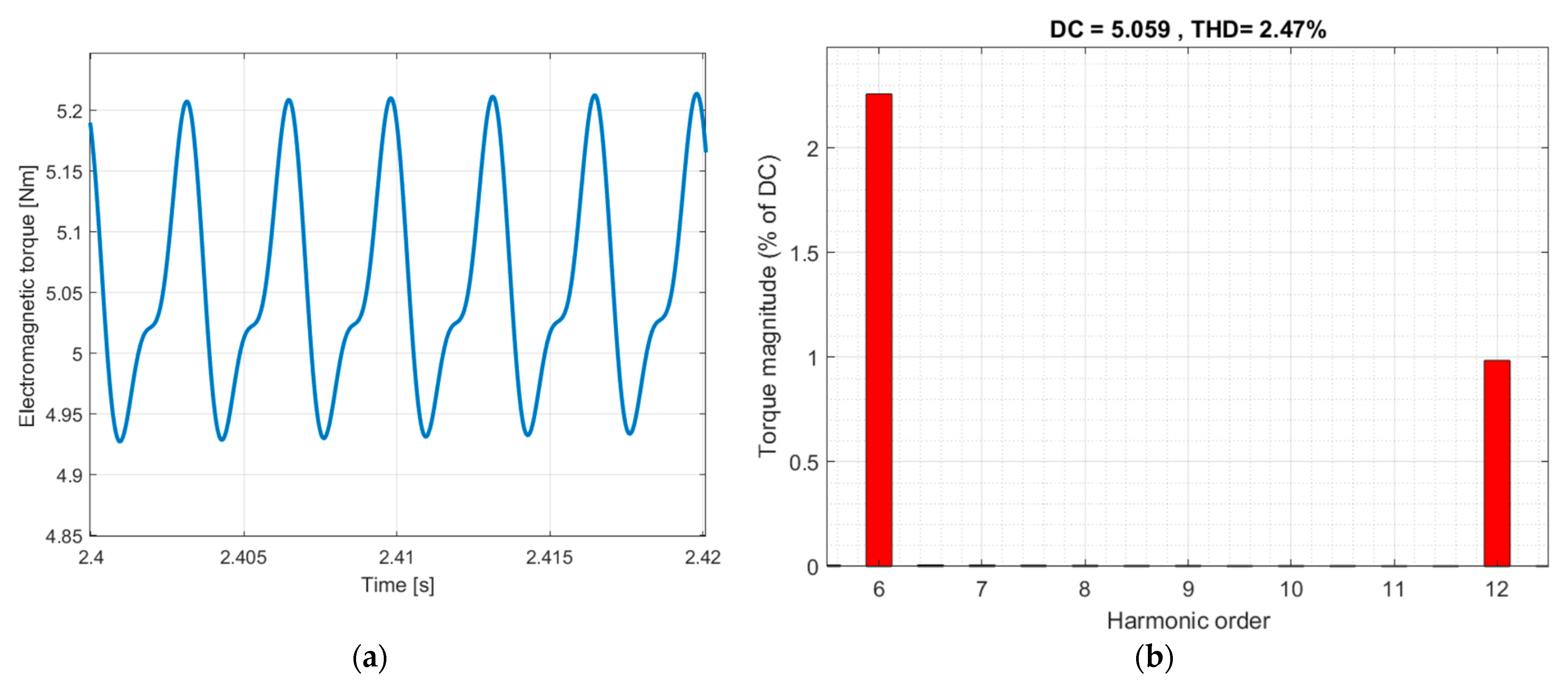
| 6 | 0 | 19.18 |
| 7 | 2.98 | 0 |
| 11 | 0.96 | 0 |
| 12 | 0 | 4.92 |
| 13 | 0.81 | 0 |
| 17 | 0.02 | 0 |
| 18 | 0 | 0.12 |
| Mode of 6PIM | THD,% | |
|---|---|---|
| Stator Current | Electromagnetic Toque | |
| 10% load mode | 5.27 | 19.79 |
| nominal load | 1.08 | 2.47 |
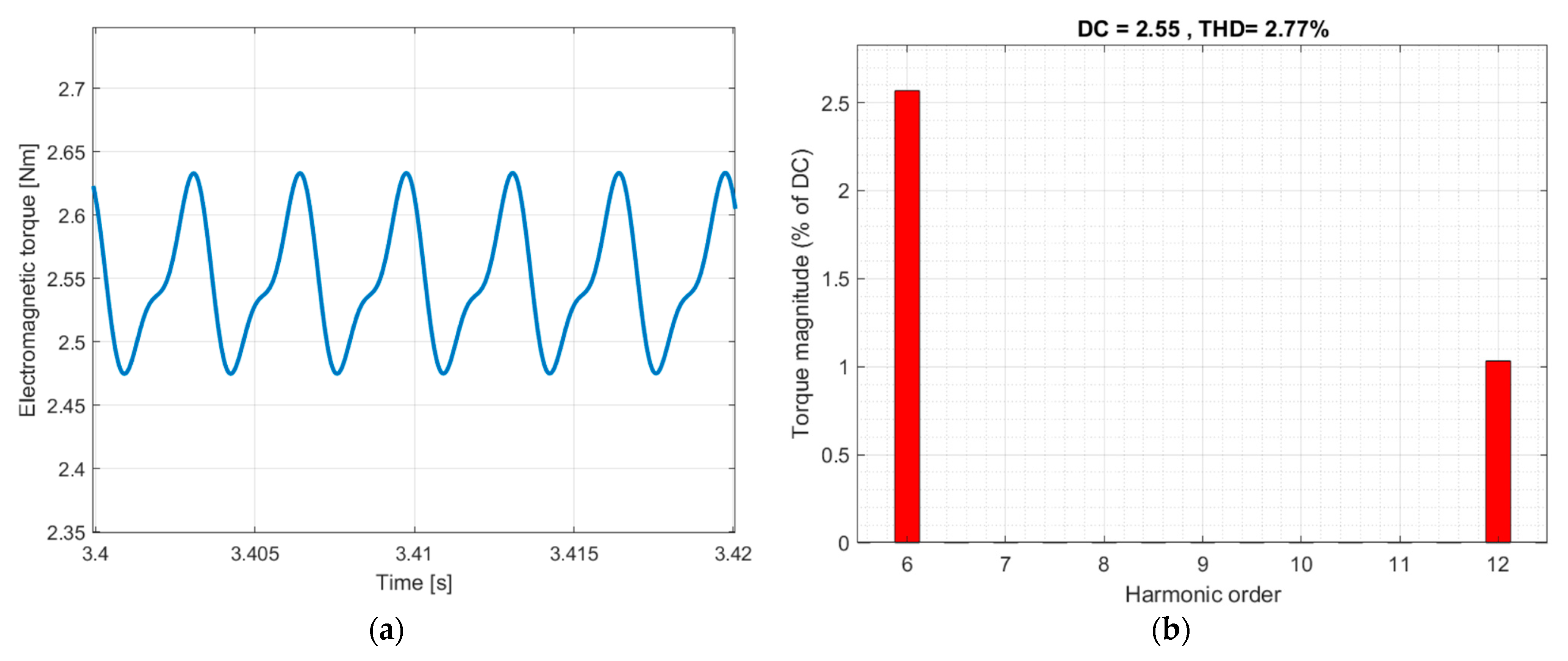
| 50% load and three open-phase ABC fault | 1.13 | 2.77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kutsyk, A.; Korkosz, M.; Semeniuk, M.; Nowak, M. An Influence of Spatial Harmonics on an Electromagnetic Torque of a Symmetrical Six-Phase Induction Machine. Energies 2023, 16, 3813. https://doi.org/10.3390/en16093813
Kutsyk A, Korkosz M, Semeniuk M, Nowak M. An Influence of Spatial Harmonics on an Electromagnetic Torque of a Symmetrical Six-Phase Induction Machine. Energies. 2023; 16(9):3813. https://doi.org/10.3390/en16093813
Chicago/Turabian StyleKutsyk, Andriy, Mariusz Korkosz, Mykola Semeniuk, and Marek Nowak. 2023. "An Influence of Spatial Harmonics on an Electromagnetic Torque of a Symmetrical Six-Phase Induction Machine" Energies 16, no. 9: 3813. https://doi.org/10.3390/en16093813
APA StyleKutsyk, A., Korkosz, M., Semeniuk, M., & Nowak, M. (2023). An Influence of Spatial Harmonics on an Electromagnetic Torque of a Symmetrical Six-Phase Induction Machine. Energies, 16(9), 3813. https://doi.org/10.3390/en16093813