
Cloud-Based Deep Learning for Co-Estimation of Battery State of Charge and State of Health


 , ,
, , 
Abstract
:1. Introduction
1.1. Literature Review
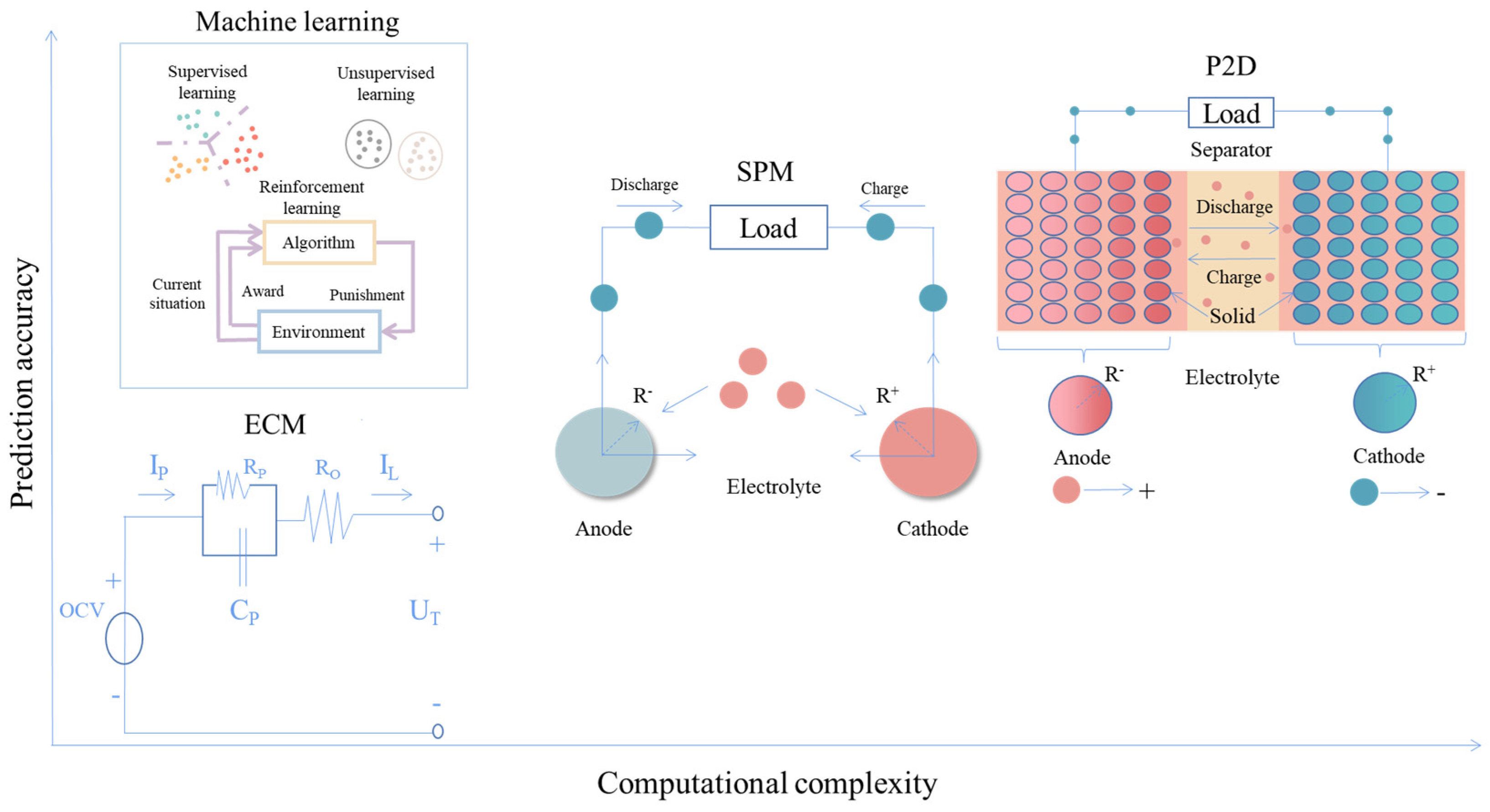
1.1.1. Modelling and Predicting Battery States
1.1.2. Cloud-Based Progress on Battery State Prediction
1.2. Major Challenges Involved
- (1)
- Although data-driven machine learning techniques introduce considerable savings in computational cost compared with the traditional numerical methods (e.g., solving PDEs using finite elements), it still requires complex formulations and elaborate computer codes. Performing such tasks requires scheduling the training of computational algorithms in a more powerful computing environment. This is where cloud systems have come into play.
- (2)
- Upon identifying cell conditions in real-world applications, there will be cell-to-cell, pack-to-pack and batch-to-batch variation, even with the most state-of-the-art manufacturing techniques. These cells would exhibit distinct states after long-term incubation. The specific approach to the predictive modelling of such battery systems significantly relies on the amount of data available and on the cell itself.
- (3)
- In field applications such as EVs, the operation of the batteries depends not only on user driving patterns but also on environmental factors. Lab tests cannot incorporate diverse driving cycles and resting periods. Uncertainty arising from the randomness of high-dimensional parameter spaces make it difficult to perfectly match lab experiments to field applications.
- (4)
- Last, but perhaps most important: even with open sharing of test data, reproducibility and generalization issues make it rather challenging to transfer academic progress to industry. However, the cloud-computing system provides a very flexible platform for analyzing, training and developing new frameworks and standardized benchmarks, which can be leveraged to improve our observational, empirical and physical understanding of real-life battery systems in a more intelligent manner.
1.3. Contributions of the Work
- (a)
- Field data, which exhibits irregular loading conditions, dynamic operating scenarios, and path-dependent deterioration processes, is generated and uploaded to the cloud, reflecting real-world usage and making reliable predictions meaningful.
- (b)
- A specialized attention-based transformer neural network model is designed to learn parameters in the high-dimensional stochastic thermodynamic and kinetic battery system. The proposed transformer model has the advantage of strong generalization and robustness in the small data regime.
- (c)
- We examine the evolution of batteries using deep learning approaches in the time-resolved context and demonstrate how transformer neural networks, which automatically extract useful features, have the potential to overcome the limitations that have hindered the widespread adoption of data-driven machine learning-based techniques to date.
- (d)
- The designed cloud-based data-driven framework provides a highly flexible digital solution for a wide range of diverse physical, chemical and electrochemical problems in a way that produces promising results for the target outputs.
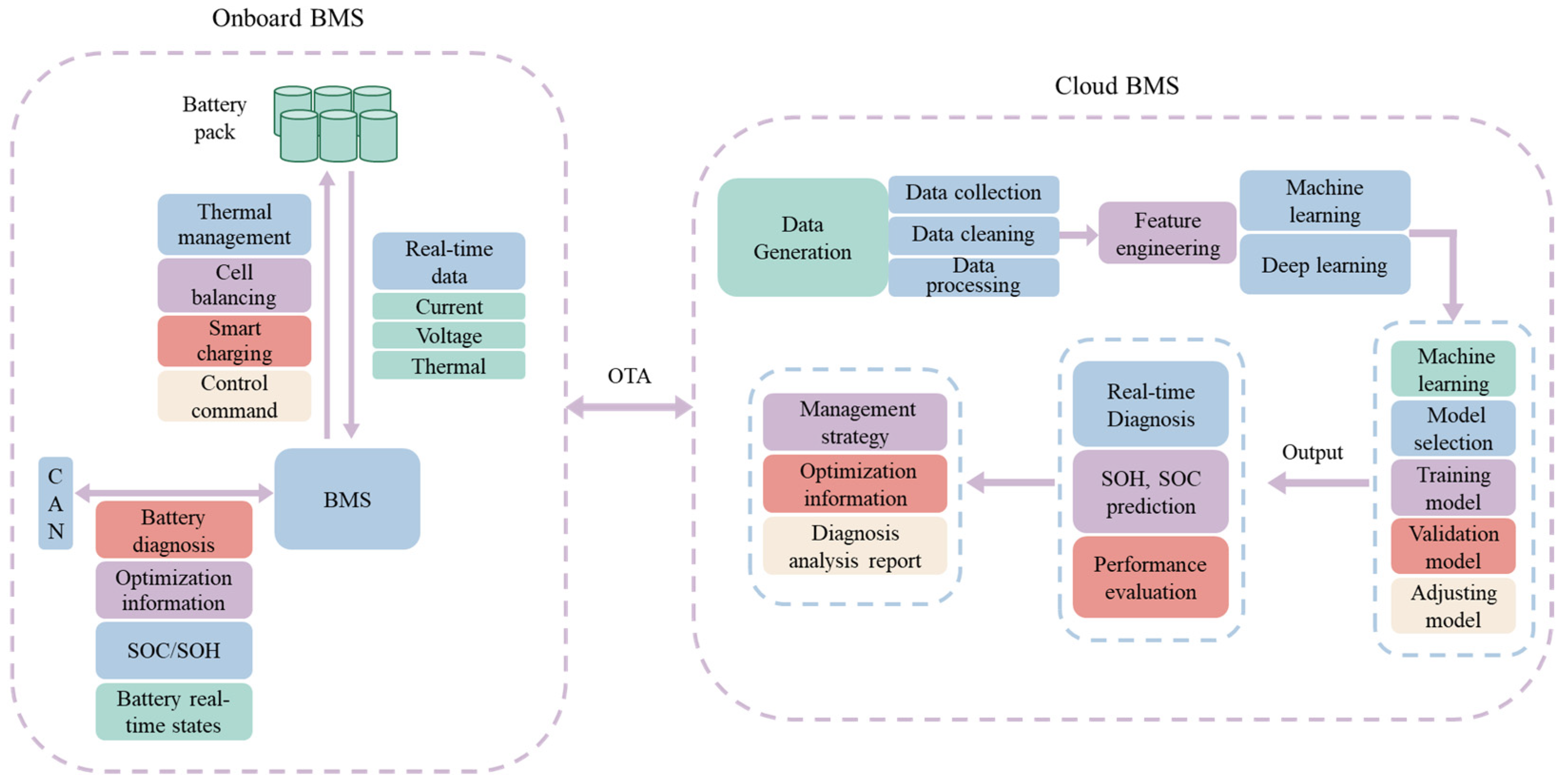
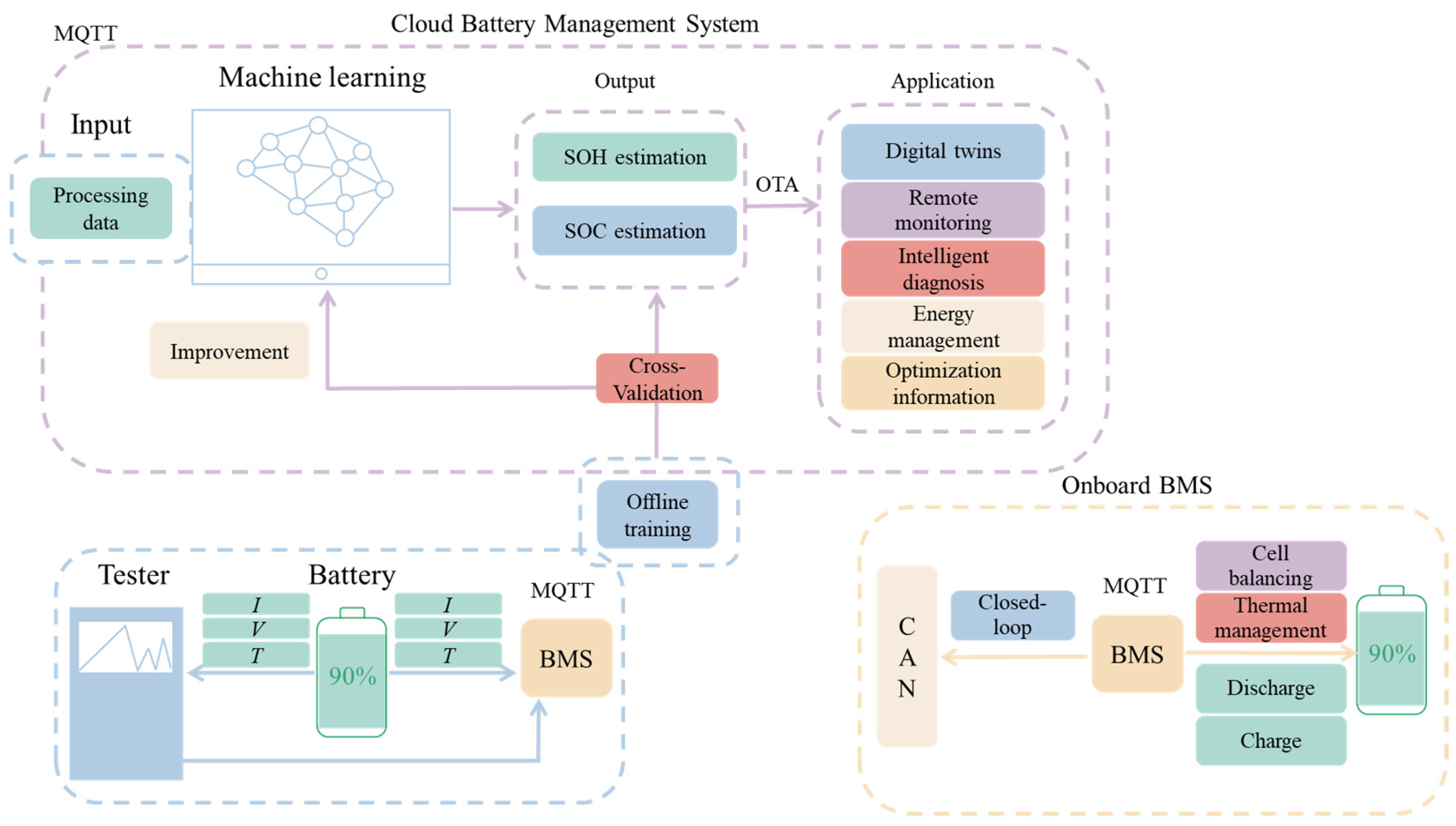
2. Key Components of Cloud BMS
2.1. Physical Entity
2.2. IoT
2.3. Cloud
2.4. Modelling
3. Methodologies
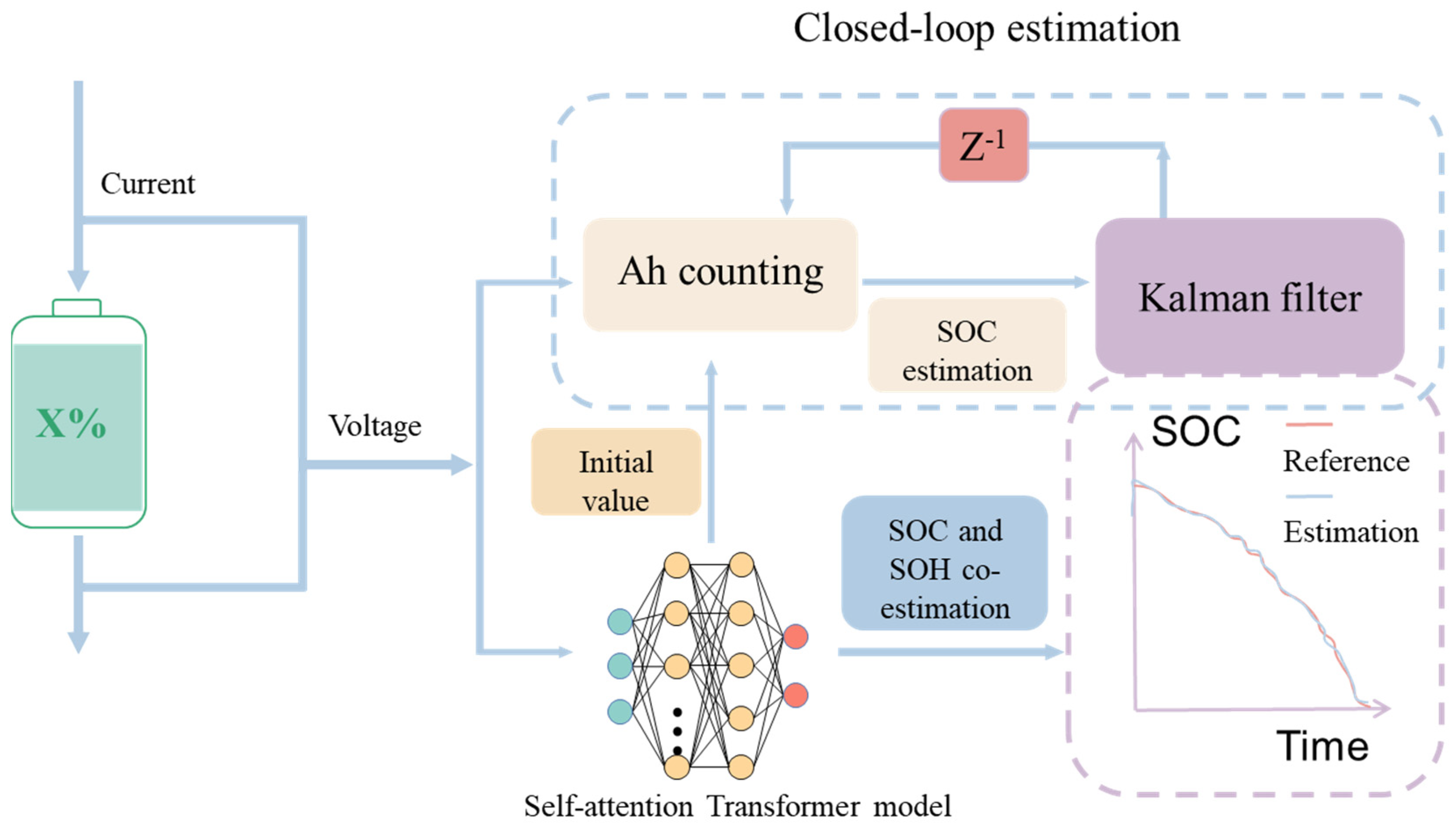
3.1. Transformer Neural Networks for Co-Estimation
3.1.1. Data Processing
3.1.2. Embedding
3.1.3. Dual Encoder
3.2. Data Generation
3.3. Evaluation Criteria
4. Performance of Cloud-Based BMS
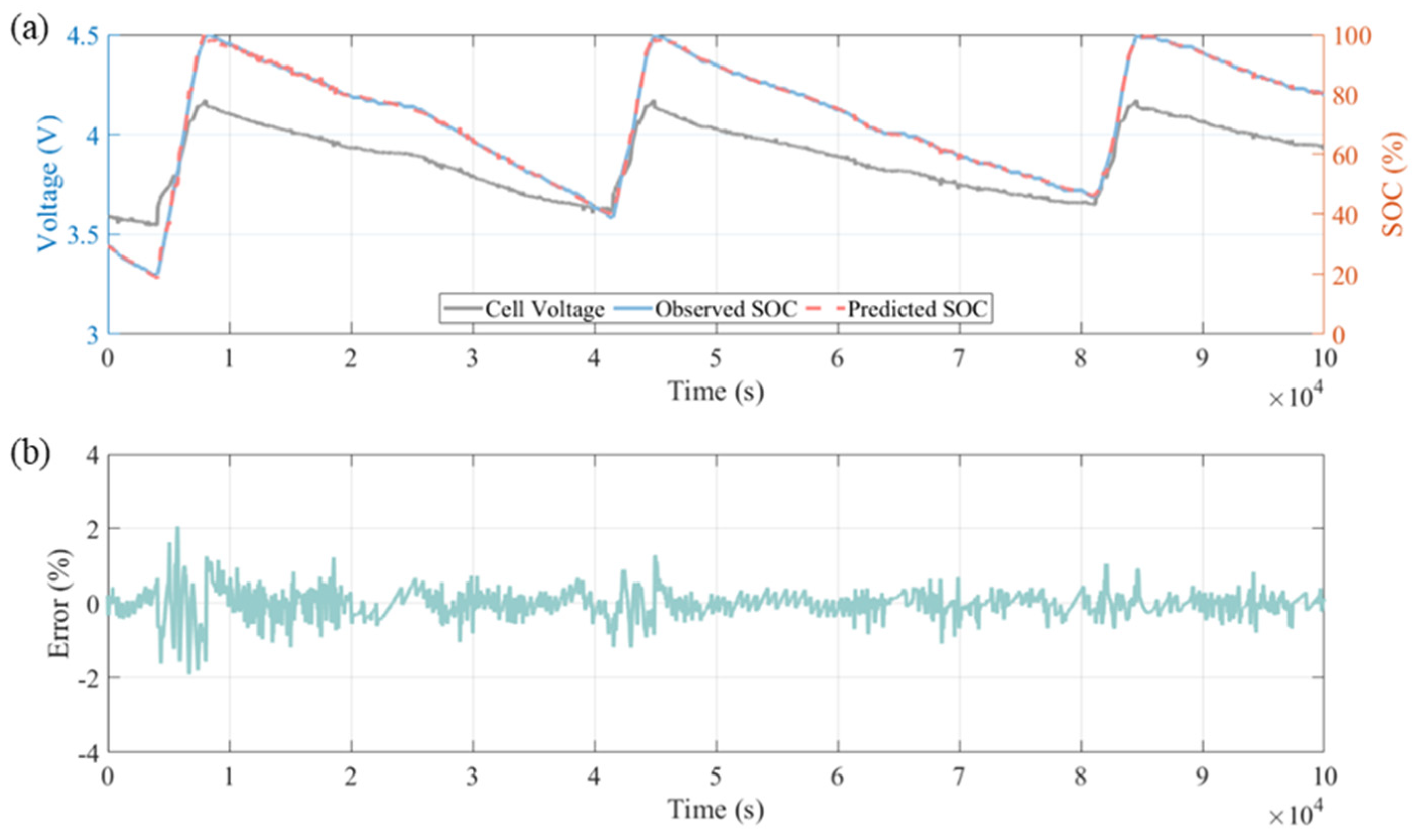
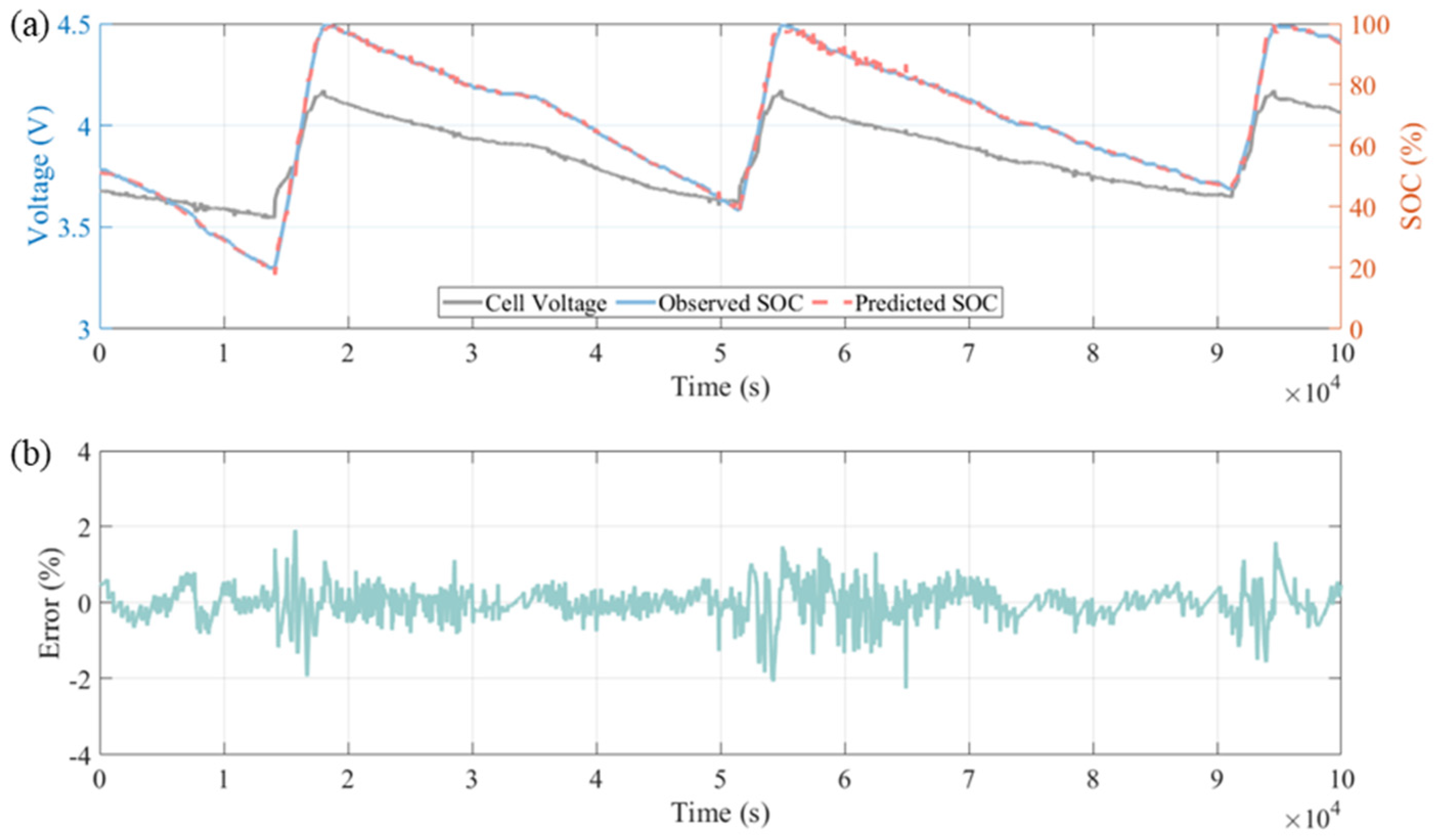
4.1. SOC Estimation Results
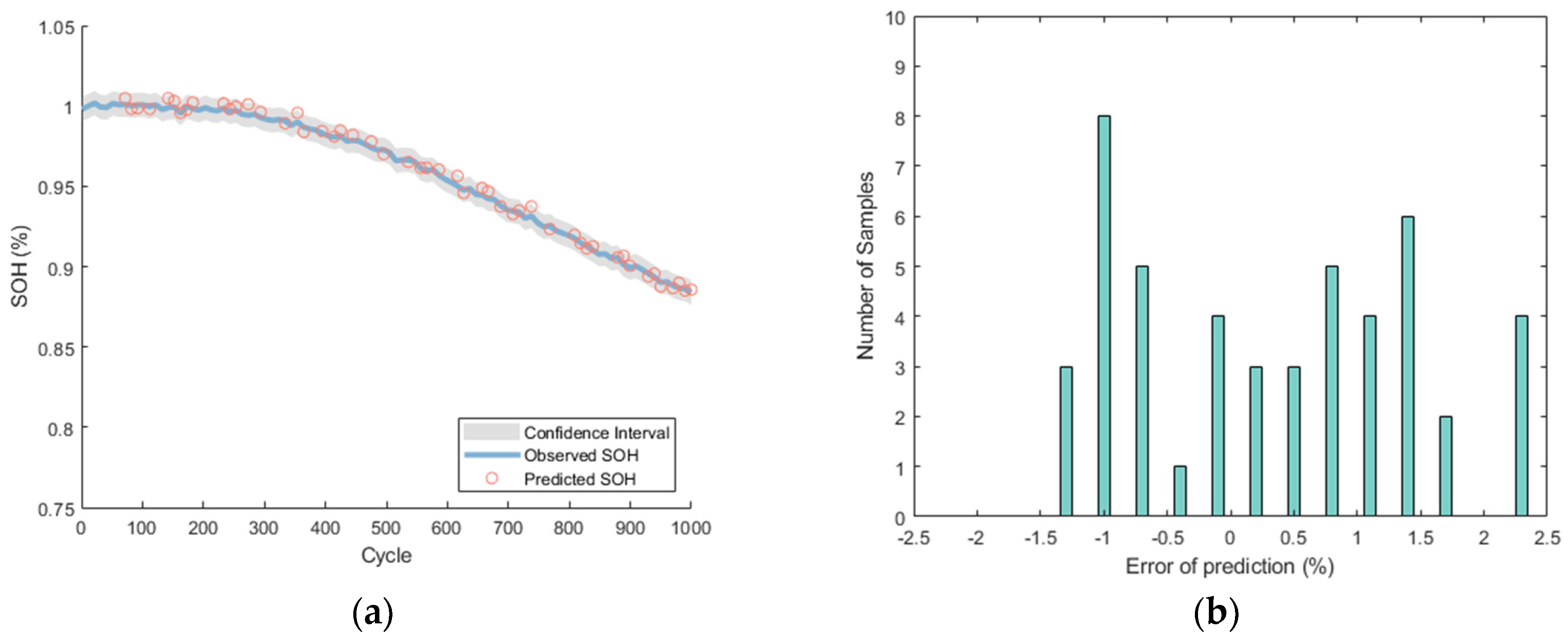
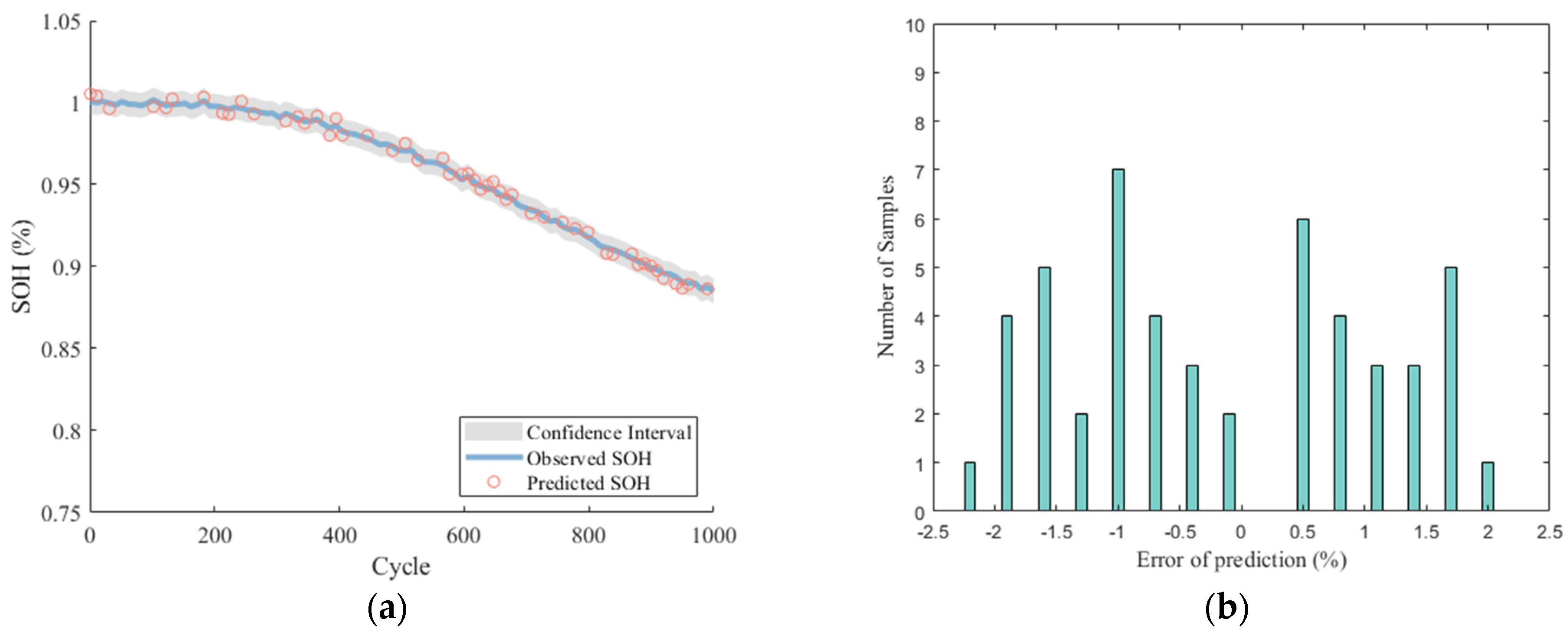
4.2. SOH Estimation Results
5. Outlook
- (i)
- There is a significant opportunity for synergy between onboard-BMS and cloud-BMS technologies. Urgent and real-time tasks should be allocated to onboard BMS, while complex tasks that involve multiple scales and temporal dependencies should be distributed to cloud BMS.
- (ii)
- Machine-learning models rely heavily on observational data, and new algorithms and mathematics are needed to yield accurate and robust methods that can handle high signal-to-noise ratios and outliers. These methods should also be able to generalize well beyond the training data. However, the model requires craftsmanship and elaborate implementations on different cell chemistries.
- (iii)
- Battery behavior in EV applications is much more complex than in lab tests due to unprecedented spatial and temporal coverage. Working with noisy data and limited training sets and dealing with under-constrained battery problems with uncertain boundary conditions are major challenges that need to be addressed.
- (iv)
- Developing deep learning architectures for modeling multiscale and multiphysics battery systems is currently done empirically, which is time-consuming. Training and optimizing deep neural networks can also be expensive. Emerging meta-learning techniques and transfer learning may offer promising directions to explore.
- (v)
- Battery performance fluctuates unpredictably throughout its operational life. Precise forecasting and modeling of long-range spatio-temporal dependencies across cell, pack, and system levels are essential for efficient learning algorithms. A promising approach might involve hybrid modeling, combining physical process models with configurable, structured data-driven machine learning.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, M.; Lu, J.; Chen, Z.; Amine, K. 30 years of lithium-ion batteries. Adv. Mater. 2018, 30, 1800561. [Google Scholar] [CrossRef] [PubMed]
- Sulzer, V.; Mohtat, P.; Aitio, A.; Lee, S.; Yeh, Y.T.; Steinbacher, F.; Khan, M.U.; Lee, J.W.; Siegel, J.B.; Howey, D.A. The challenge and opportunity of battery lifetime prediction from field data. Joule 2021, 5, 1934–1955. [Google Scholar] [CrossRef]
- Gibney, E. Europe sets its sights on the cloud: Three large labs hope to create a giant public--private computing network. Nature 2015, 523, 136–138. [Google Scholar] [CrossRef] [PubMed]
- Bosch Mobility Solutions: Battery in the Cloud. Available online: https://www.bosch-mobility-solutions.com/en/solutions/software-and-services/battery-in-the-cloud/battery-in-the-cloud/ (accessed on 19 August 2022).
- Panasonic Announces UBMC Service: A Cloud-Based Battery Management Service to Ascertain Battery State in Electric Mobility Vehicles. Available online: https://news.panasonic.com/global/press/data/2020/12/en201210-1/en201210-1.pdf (accessed on 19 August 2022).
- HUAWEI: CloudLi. Available online: https://carrier.huawei.com/en/products/digital-power/telecom-energy/Central-Office-Power (accessed on 19 August 2022).
- National Monitoring and Management Platform for NEVs. Available online: http://www.bitev.org.cn/a/48.html (accessed on 19 August 2022).
- Zheng, Y.; Ouyang, M.; Han, X.; Lu, L.; Li, J. Investigating the error sources of the online state of charge estimation methods for lithium-ion batteries in electric vehicles. J. Power Sources 2018, 377, 161–188. [Google Scholar] [CrossRef]
- Hu, X.; Xu, L.; Lin, X.; Pecht, M. Battery lifetime prognostics. Joule 2020, 4, 310–346. [Google Scholar] [CrossRef]
- Berecibar, M. Machine-learning techniques used to accurately predict battery life. Nature 2019, 568, 325–326. [Google Scholar] [CrossRef] [PubMed]
- Ng, M.F.; Zhao, J.; Yan, Q.; Conduit, G.J.; Seh, Z.W. Predicting the state of charge and health of batteries using data-driven machine learning. Nat. Mach. Intell. 2020, 2, 161–170. [Google Scholar] [CrossRef]
- Dineva, A.; Csomós, B.; Sz, S.K.; Vajda, I. Investigation of the performance of direct forecasting strategy using machine learning in State-of-Charge prediction of Li-ion batteries exposed to dynamic loads. J. Energy Storage 2021, 36, 102351. [Google Scholar] [CrossRef]
- Yang, F.; Wang, D.; Xu, F.; Huang, Z.; Tsui, K.L. Lifespan prediction of lithium-ion batteries based on various extracted features and gradient boosting regression tree model. J. Power Sources 2020, 476, 228654. [Google Scholar] [CrossRef]
- Severson, K.A.; Attia, P.M.; Jin, N.; Perkins, N.; Jiang, B.; Yang, Z.; Chen, M.H.; Aykol, M.; Herring, P.K.; Braatz, R.D. Data-driven prediction of battery cycle life before capacity degradation. Nat. Energy 2019, 4, 383–391. [Google Scholar] [CrossRef]
- Babaeiyazdi, I.; Rezaei-Zare, A.; Shokrzadeh, S. State of charge prediction of EV Li-ion batteries using EIS: A machine learning approach. Energy 2021, 223, 120116. [Google Scholar] [CrossRef]
- Richardson, R.R.; Osborne, M.A.; Howey, D.A. Battery health prediction under generalized conditions using a Gaussian process transition model. J. Energy Storage 2019, 23, 320–328. [Google Scholar] [CrossRef]
- Jiao, M.; Wang, D.; Qiu, J. A GRU-RNN based momentum optimized algorithm for SOC estimation. J. Power Sources. 2020, 459, 228051. [Google Scholar] [CrossRef]
- Cui, Z.; Kang, L.; Li, L.; Wang, L.; Wang, K. A hybrid neural network model with improved input for state of charge estimation of lithium-ion battery at low temperatures. Renew. Energy 2022, 198, 1328–1340. [Google Scholar] [CrossRef]
- Che, Y.; Liu, Y.; Cheng, Z. SOC and SOH identification method of li-ion battery based on SWPSO-DRNN. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4050–4061. [Google Scholar] [CrossRef]
- Schmitt, J.; Horstkötter, I.; Bäker, B. Electrical lithium-ion battery models based on recurrent neural networks: A holistic approach. J. Energy Storage 2023, 58, 106461. [Google Scholar] [CrossRef]
- Sherstinsky, A. Fundamentals of recurrent neural network (rnn) and long short-term memory (lstm) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Ahmed, S.; Nielsen, I.E.; Tripathi, A.; Siddiqui, S.; Rasool, G.; Ramachandran, R.P. Transformers in time-series analysis: A tutorial. arXiv 2022, arXiv:2205.01138. [Google Scholar]
- Biggio, L.; Bendinelli, T.; Kulkarni, C.; Fink, O. Dynaformer: A Deep Learning Model for Ageing-aware Battery Discharge Prediction. arXiv 2022, arXiv:2206.02555. [Google Scholar]
- Drake, N. Cloud computing beckons scientists. Nature 2014, 509, 543–544. [Google Scholar] [CrossRef]
- Li, K.; Zhou, P.; Lu, Y.; Han, X.; Li, X.; Zheng, Y. Battery life estimation based on cloud data for electric vehicles. J. Power Sources 2020, 468, 228192. [Google Scholar] [CrossRef]
- Li, S.; He, H.; Wei, Z.; Zhao, P. Edge computing for vehicle battery management: Cloud-based online state estimation. J. Energy Storage 2022, 55, 105502. [Google Scholar] [CrossRef]
- Zhao, J.; Nan, J.; Wang, J.; Ling, H.; Lian, Y.; Burke, A. Battery Diagnosis: A Lifelong Learning Framework for Electric Vehicles. In Proceedings of the 2022 IEEE Vehicle Power and Propulsion Conference (VPPC), Merced, CA, USA, 1–4 November 2022; IEEE: New York, NY, USA, 2022; pp. 1–6. [Google Scholar]
- Aykol, M.; Herring, P.; Anapolsky, A. Machine learning for continuous innovation in battery technologies. Nat. Rev. Mater. 2020, 5, 725–727. [Google Scholar] [CrossRef]
- Zhao, J.; Burke, A.F. Electric Vehicle Batteries: Status and Perspectives of Data-Driven Diagnosis and Prognosis. Batteries 2022, 8, 142. [Google Scholar] [CrossRef]
- Mohammadi, F.; Rashidzadeh, R. An overview of IoT-enabled monitoring and control systems for electric vehicles. IEEE Instru. Meas Mag. 2021, 24, 91–97. [Google Scholar] [CrossRef]
- Yang, S.; He, R.; Zhang, Z.; Cao, Y.; Gao, X.; Liu, X. CHAIN: Cyber hierarchy and interactional network enabling digital solution for battery full-lifespan management. Matter 2020, 3, 27–41. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Llion, J.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is All you Need. Adv. Neural. Inf. Process Syst. 2017, 30, 3–5. [Google Scholar]
- Wolf, T.; Debut, L.; Sanh, V.; Chaumond, J.; Delangue, C.; Moi, A.; Cistac, P.; Rault, T.; Louf, R.; Rush, A.M. Transformers: State-of-the-art natural language processing. In Proceedings of the 2020 Conference on Empirical Methods in Natural Language Processing: System Demonstrations, Online, 1 October 2020; EMNLP: New York, NY, USA, 2020; pp. 38–45. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; IEEE: New York, NY, USA, 2021; pp. 10012–10022. [Google Scholar]
- Zhao, J.; Ling, H.; Wang, J.; Burke, A.F.; Lian, Y. Data-driven prediction of battery failure for electric vehicles. Iscience 2022, 25, 104172. [Google Scholar] [CrossRef]
- Zhao, J.; Ling, H.; Liu, J.; Wang, J.; Burke, A.F.; Lian, Y. Machine learning for predicting battery capacity for electric vehicles. eTransportation 2023, 15, 100214. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, N.; Lu, W.; Wang, J. Deep-learning-based seismic data interpolation: A preliminary result. Geophysics 2019, 84, 11–20. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Cell type | Nickel Manganese Cobalt (NMC) |
| Nominal open circuit voltage | 3.6 V |
| Nominal capacity | 135 Ah |
| Operating voltage window | 4.2 V to 2.5 V |
| Operating current density | Up to 1 C during charging vs. up to 6 C during discharging/driving |
| Operating temperature window | Less than 45 °C protected by thermal management |
| Hyperparameter | Value/Method |
|---|---|
| Layers | 10 layers with 8 heads per layer |
| Training | 65 k gradient updates, 4096 sequence length, 64 batch size (262,144 tokens) |
| Learning Rate | Maximum of 1 × 10−3, linear warmup of 500 steps |
| Dropout | 0.2 rate |
| Optimizer | Adam with starting learning rate of 2 |
| Implementation | Use TensorFlow and PyTorch for efficient implementation |
| Layer Normalization | Normalize input to each layer of the transformer |
| Weight Tying | Tie decoder and output layer weights |
| Label Smoothing | Apply label smoothing to target labels |
| Early Stopping | Stop training when validation loss stops improving |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, D.; Zhao, J.; Wang, Z.; Zhao, H.; Eze, C.; Wang, J.; Lian, Y.; Burke, A.F. Cloud-Based Deep Learning for Co-Estimation of Battery State of Charge and State of Health. Energies 2023, 16, 3855. https://doi.org/10.3390/en16093855
Shi D, Zhao J, Wang Z, Zhao H, Eze C, Wang J, Lian Y, Burke AF. Cloud-Based Deep Learning for Co-Estimation of Battery State of Charge and State of Health. Energies. 2023; 16(9):3855. https://doi.org/10.3390/en16093855
Chicago/Turabian StyleShi, Dapai, Jingyuan Zhao, Zhenghong Wang, Heng Zhao, Chika Eze, Junbin Wang, Yubo Lian, and Andrew F. Burke. 2023. "Cloud-Based Deep Learning for Co-Estimation of Battery State of Charge and State of Health" Energies 16, no. 9: 3855. https://doi.org/10.3390/en16093855
APA StyleShi, D., Zhao, J., Wang, Z., Zhao, H., Eze, C., Wang, J., Lian, Y., & Burke, A. F. (2023). Cloud-Based Deep Learning for Co-Estimation of Battery State of Charge and State of Health. Energies, 16(9), 3855. https://doi.org/10.3390/en16093855