
Study of Wind Turbine Fault Diagnosis Based on Unscented Kalman Filter and SCADA Data

Abstract
:1. Introduction
2. System Model
2.1. Wind Power Generation Model
2.2. Gearbox Thermal Model
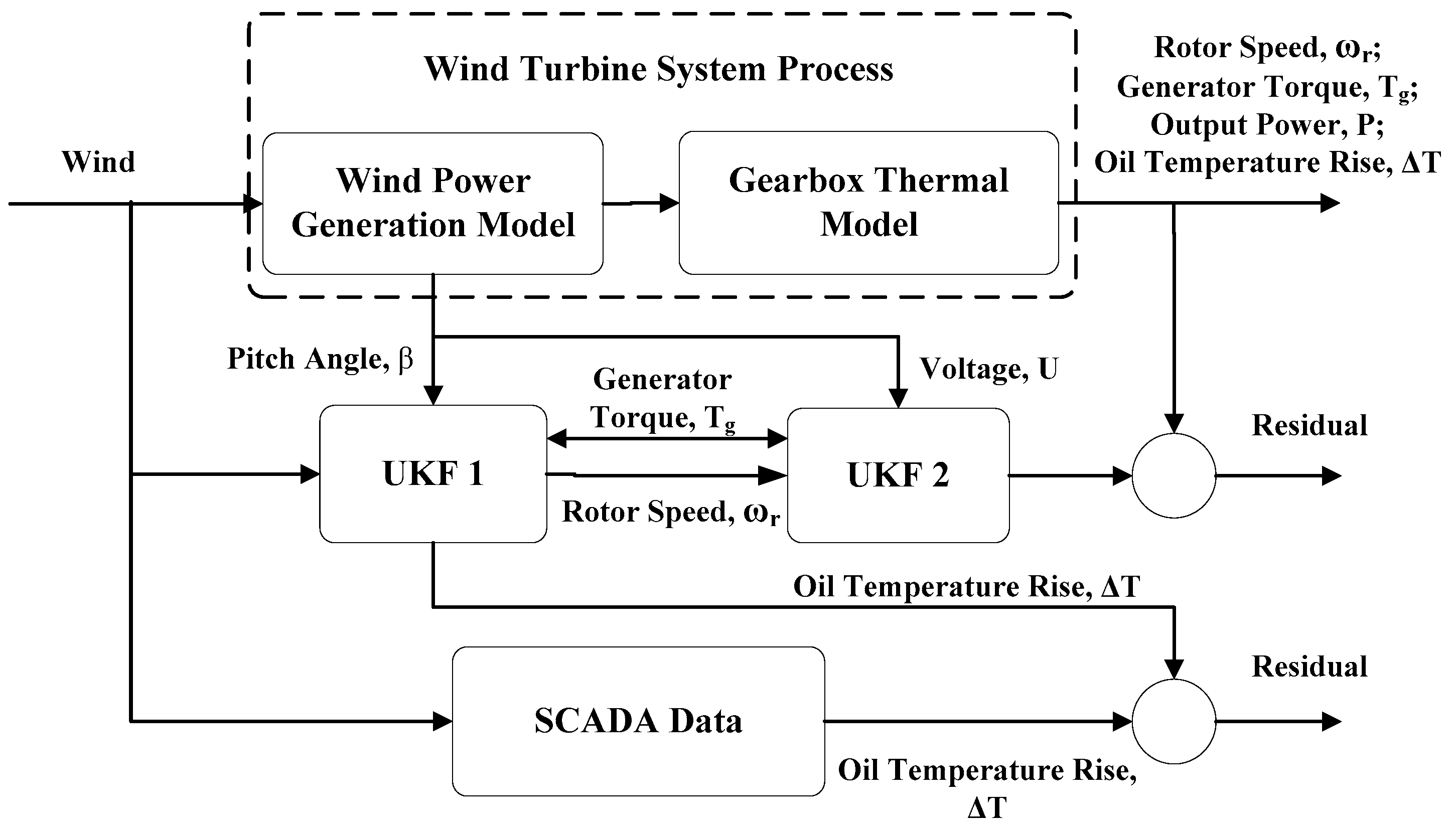
2.3. Unscented Kalman Filter Model
2.4. Fault Injection and Description
- Fault 1:
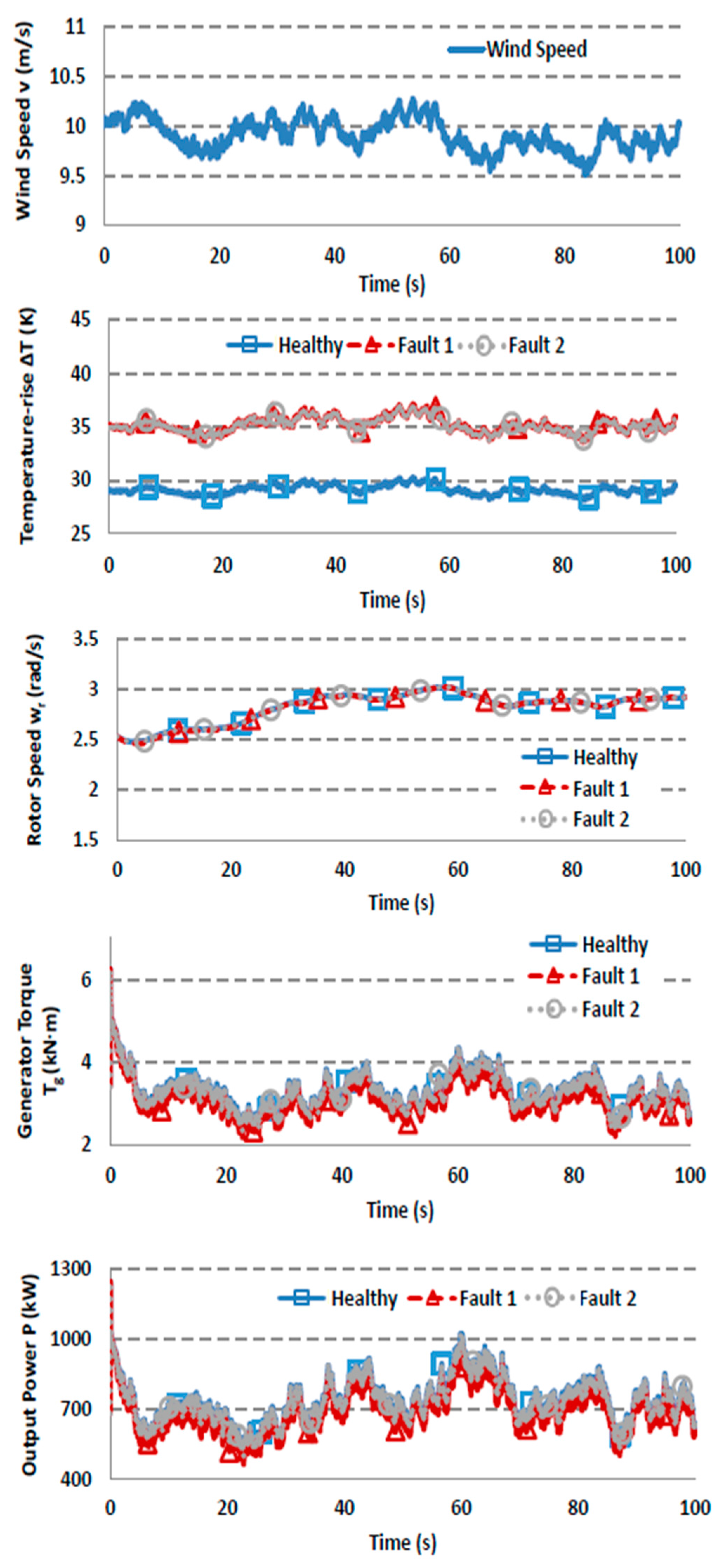
- Due to wearing of the gearbox, the mechanical energy transmission efficiency reduces to 92%, which further lead to reduce of output torque and power. Additional losses of energy dissipate as heat in the gearbox, which results in abnormal temperature-rise [16].
- Fault 2:
- Lubricating oil leakage is a common failure mode of WT. It is assumed that the lubrication oil leakage leads to the reduction of its flow rate from 0.84 L/s to 0.24 L/s. The heat dissipated through lubrication oil is reduced and therefore results in temperature-rise of gearbox.
- Fault 3:
- This paper simulates pitch system failure by setting pitch angle as 45° when wind speed is below rated wind speed range. Increase of pitch angel will lead to decrease of mechanical energy extracted by WT and then power generation.
3. Simulation Results and Analysis
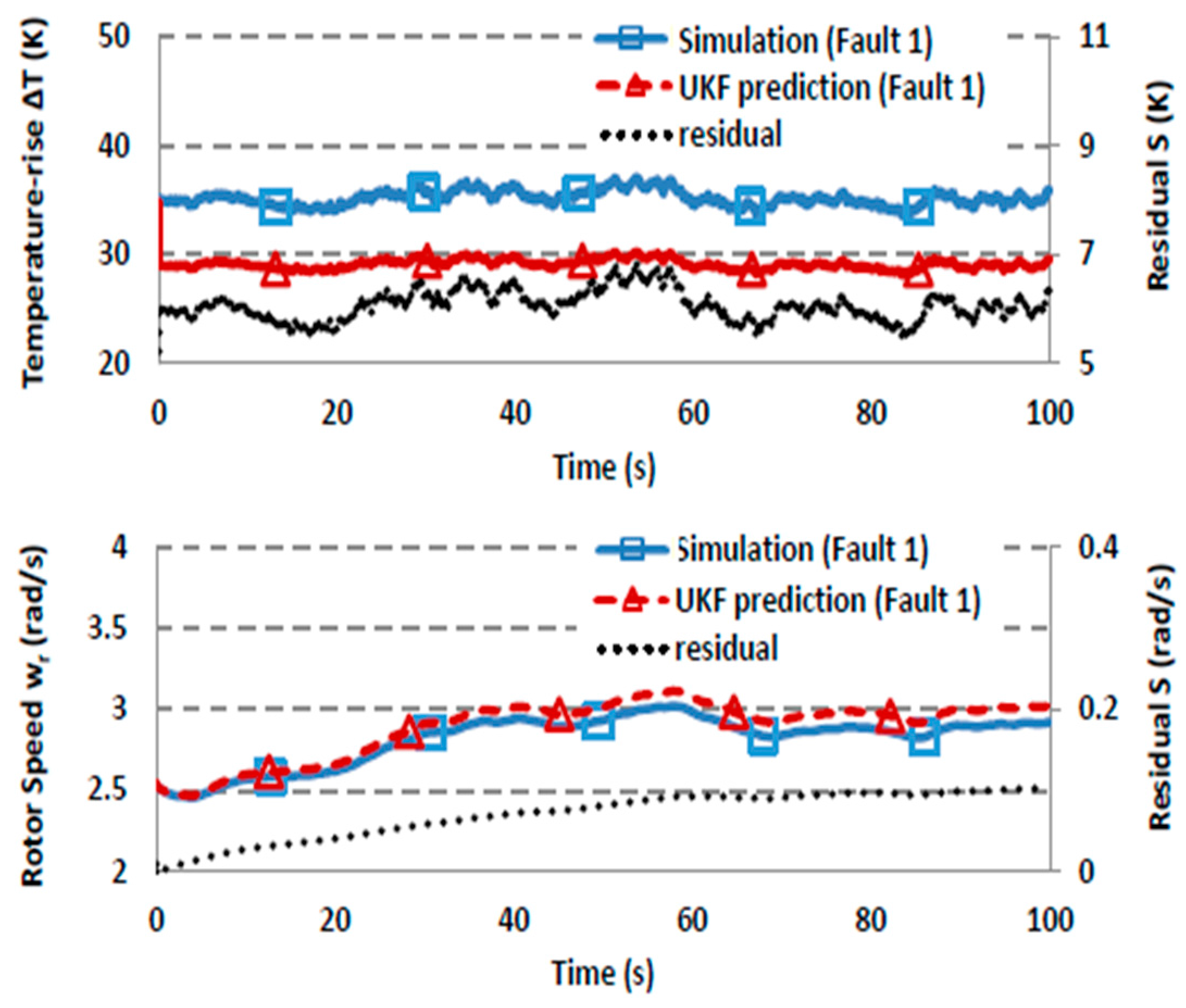
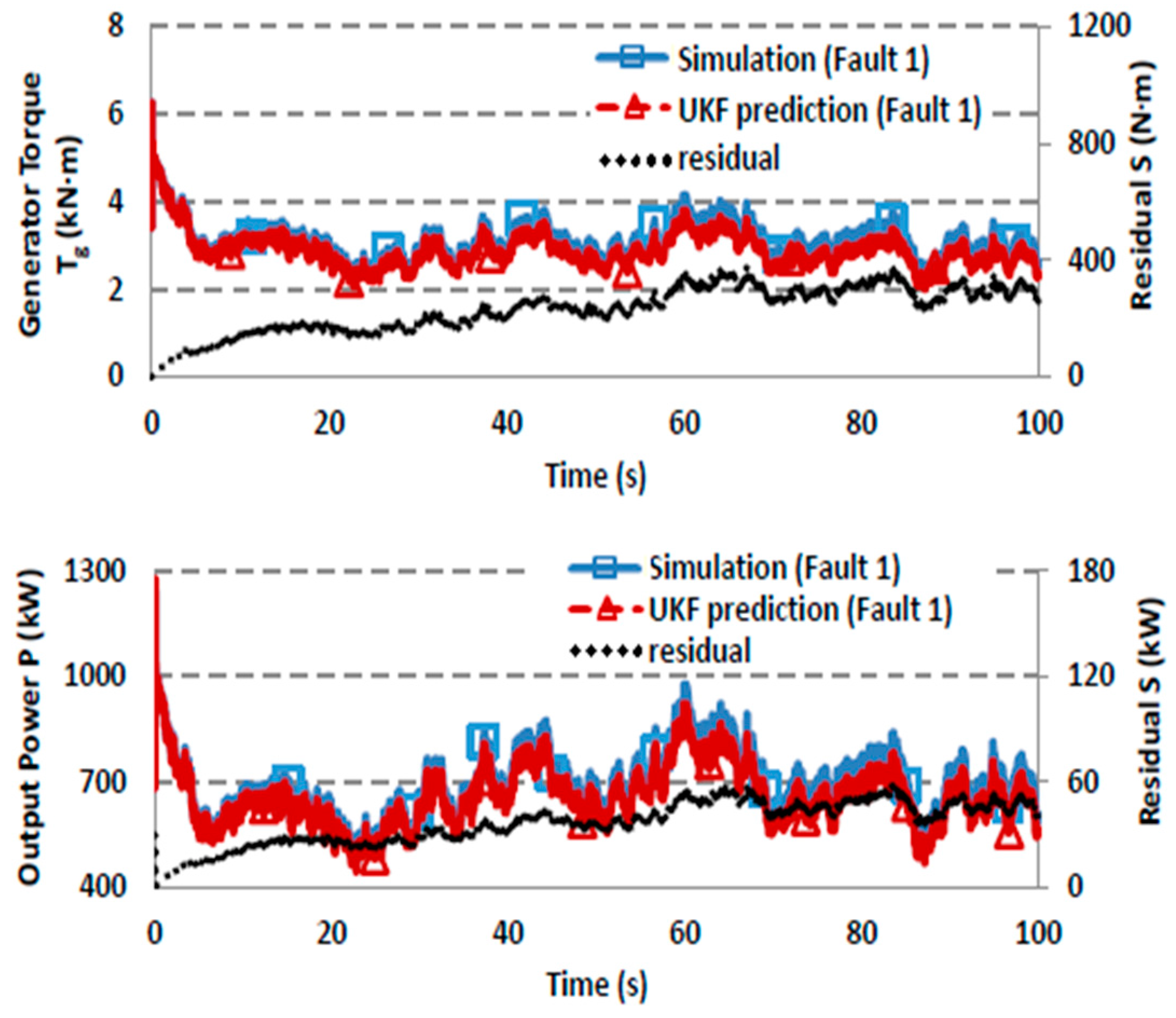
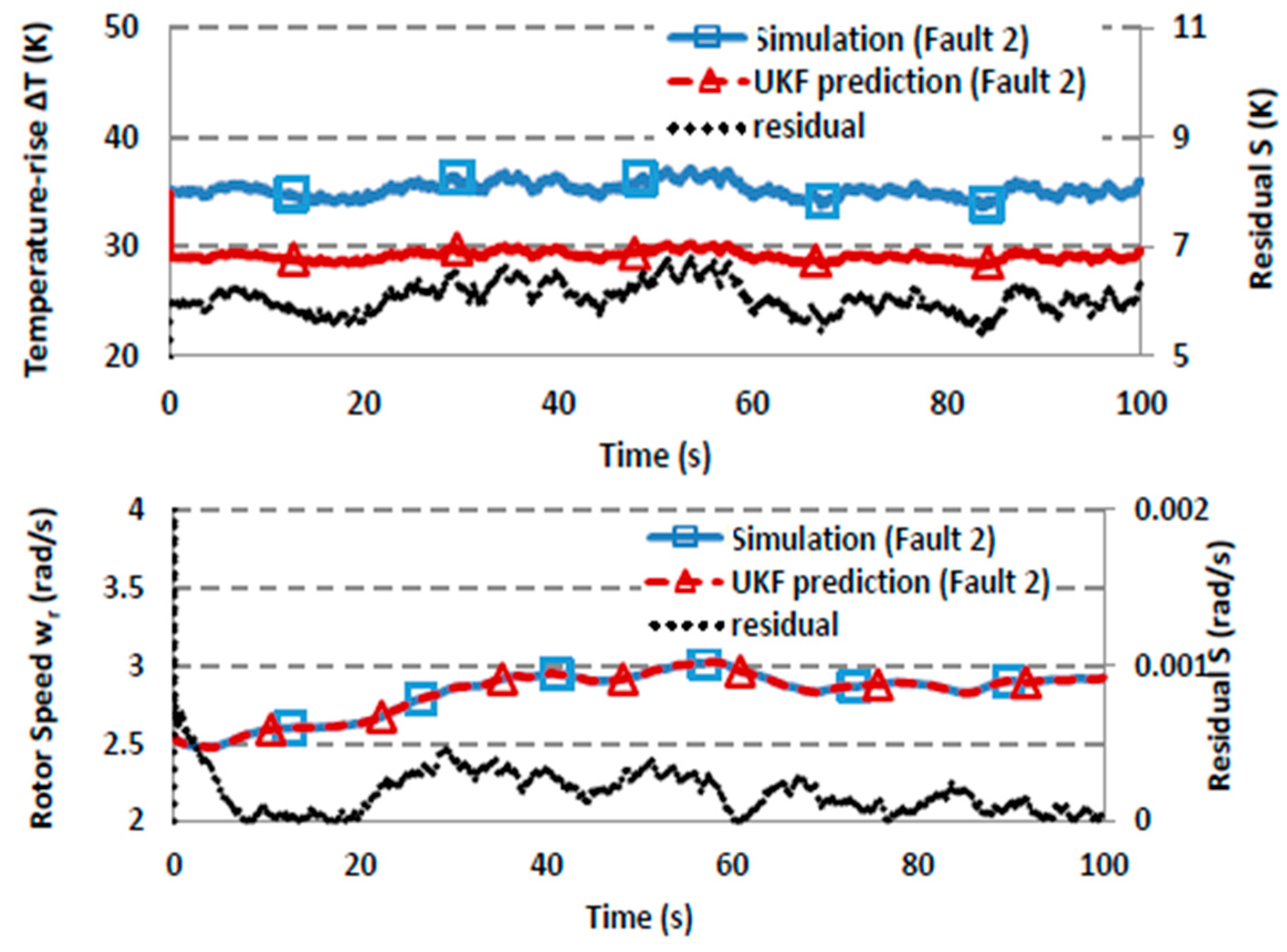
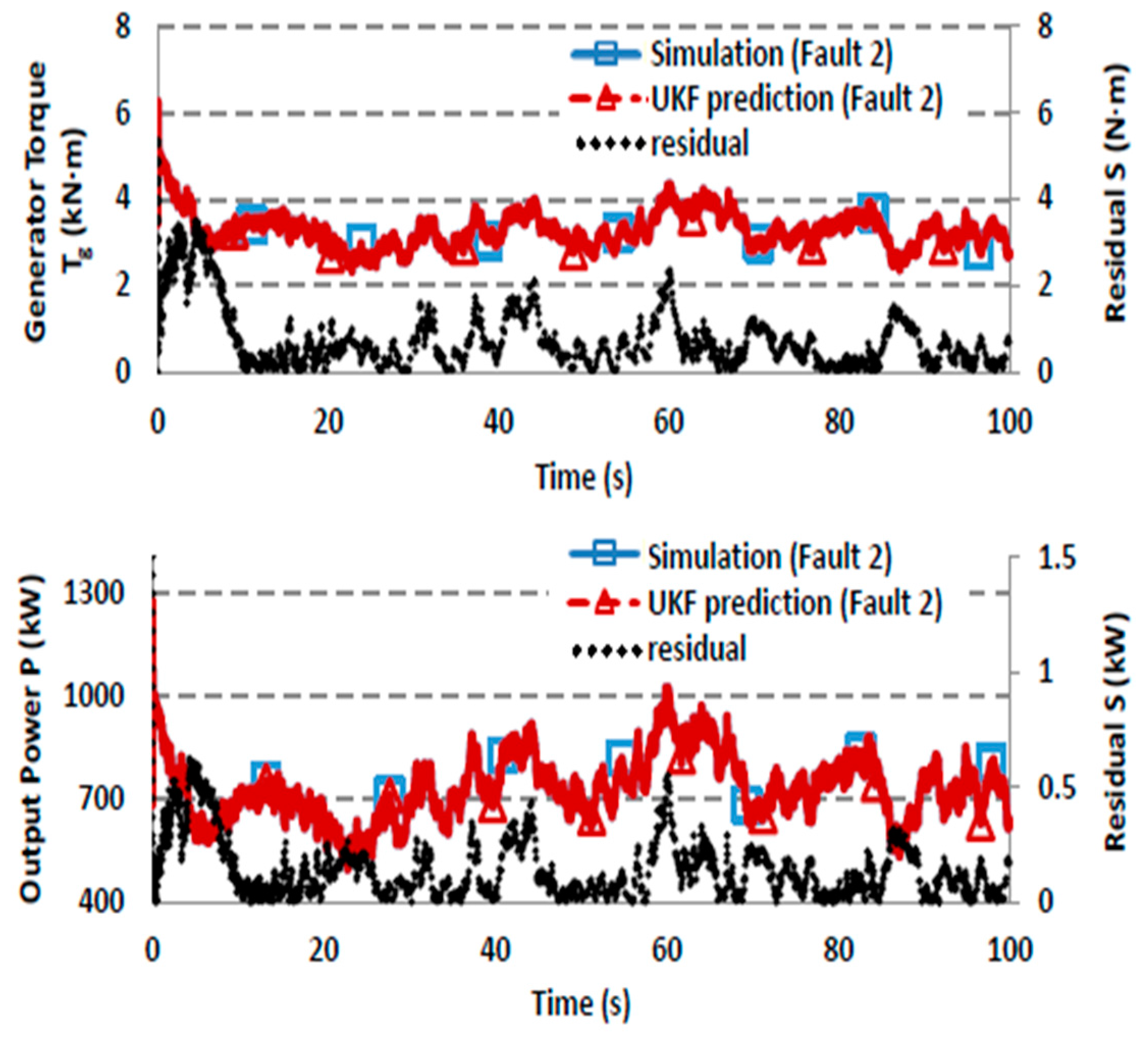
3.1. Diagnosis of Faults 1 and 2
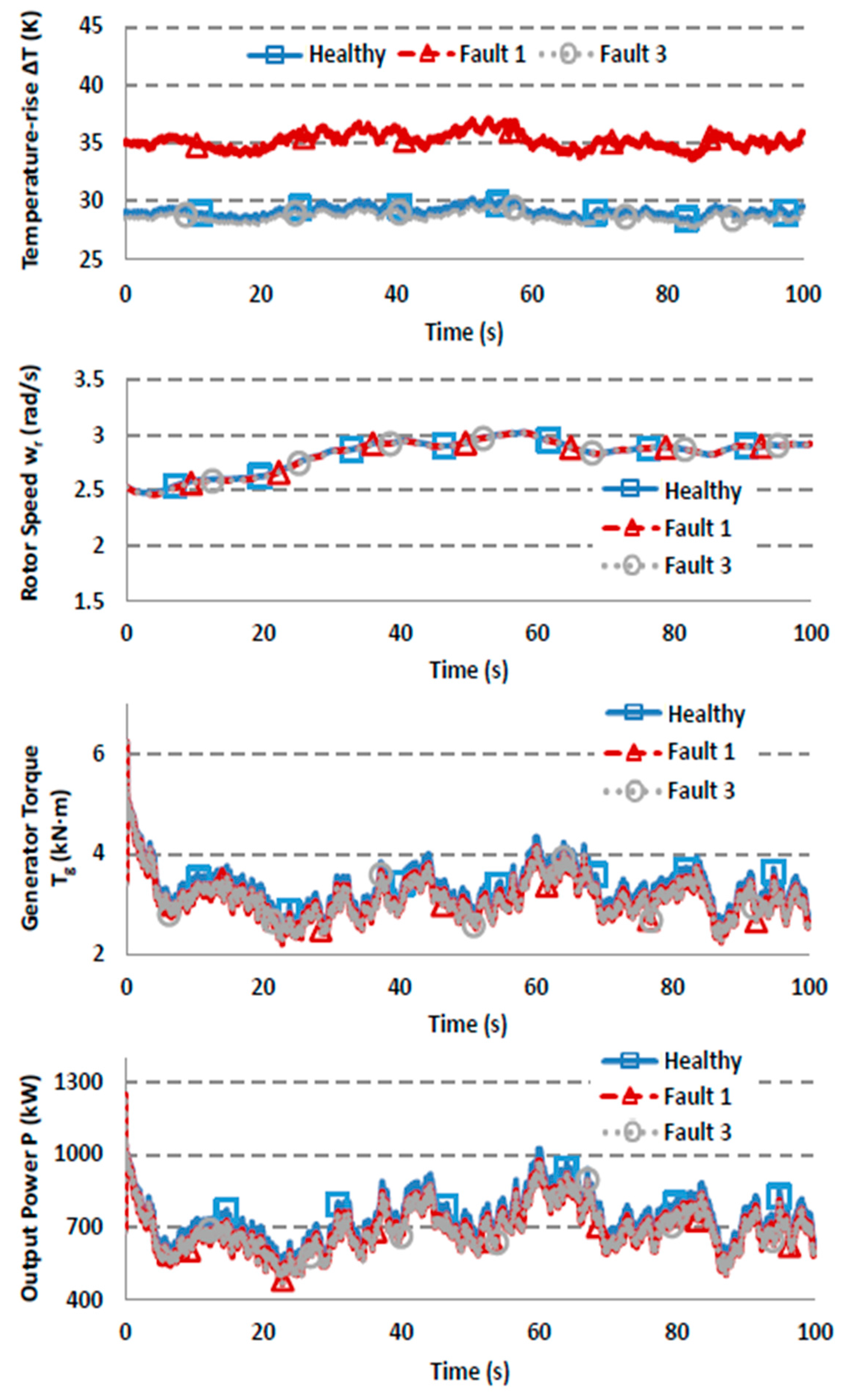
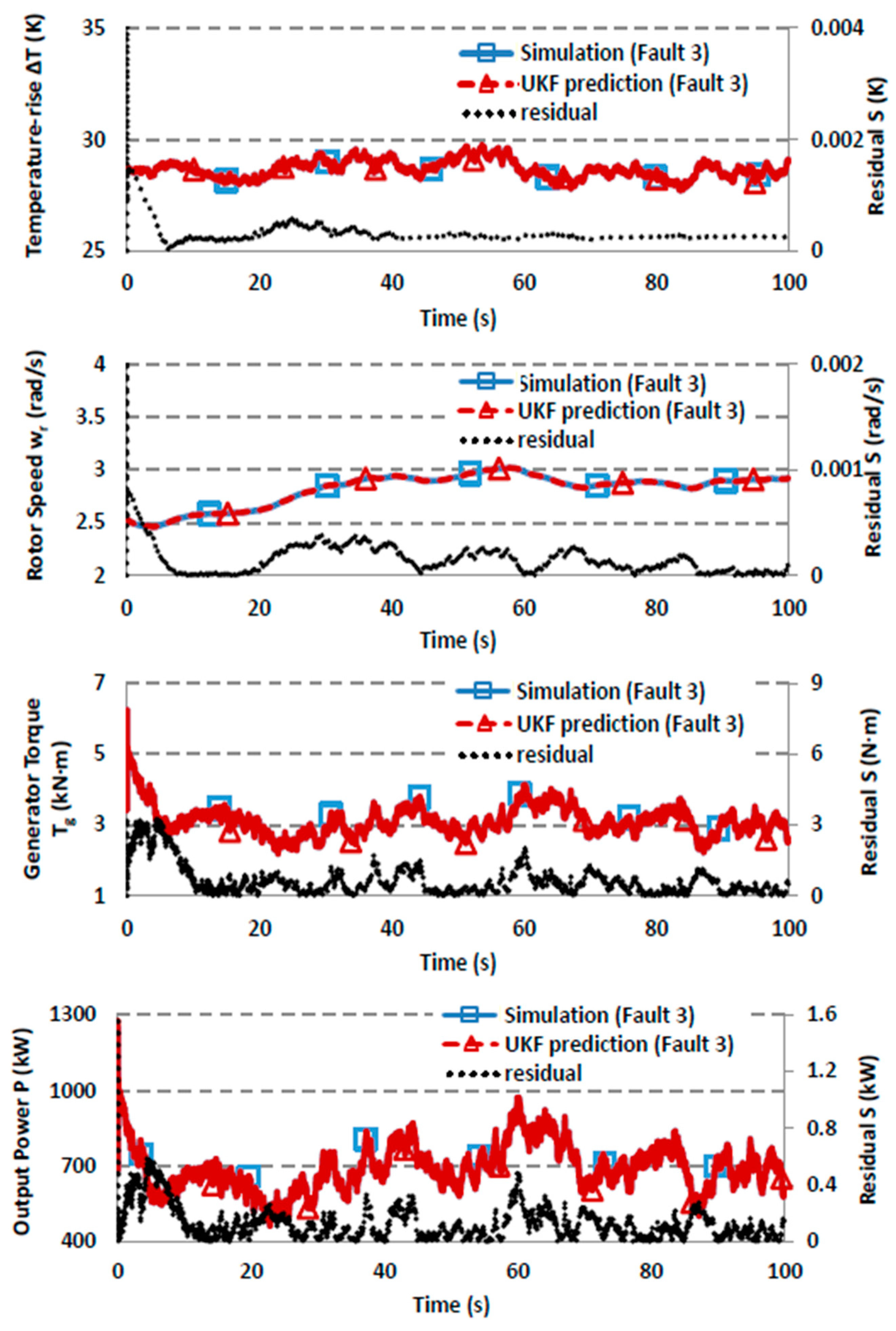
3.2. Diagnosis of Faults 1 and 3
3.3. Discussion
- (i)
- Fault 1 is representing such types of failures: due to a certain subcomponent (the gearbox in this case) degradation, local parameter (transmission efficiency) variation of the subcomponents causes WT different dynamic response. The control system changes certain process parameters (Tg and ωr in this case) to adapt to the varied local parameters, and then to maintain a stable system according to control strategy. Analyzing residuals tendency of rotor speed, generator torque, output power and oil temperature-rise between simulated and UKF predicted results can identify Fault 1 from Faults 2 and 3.
- (ii)
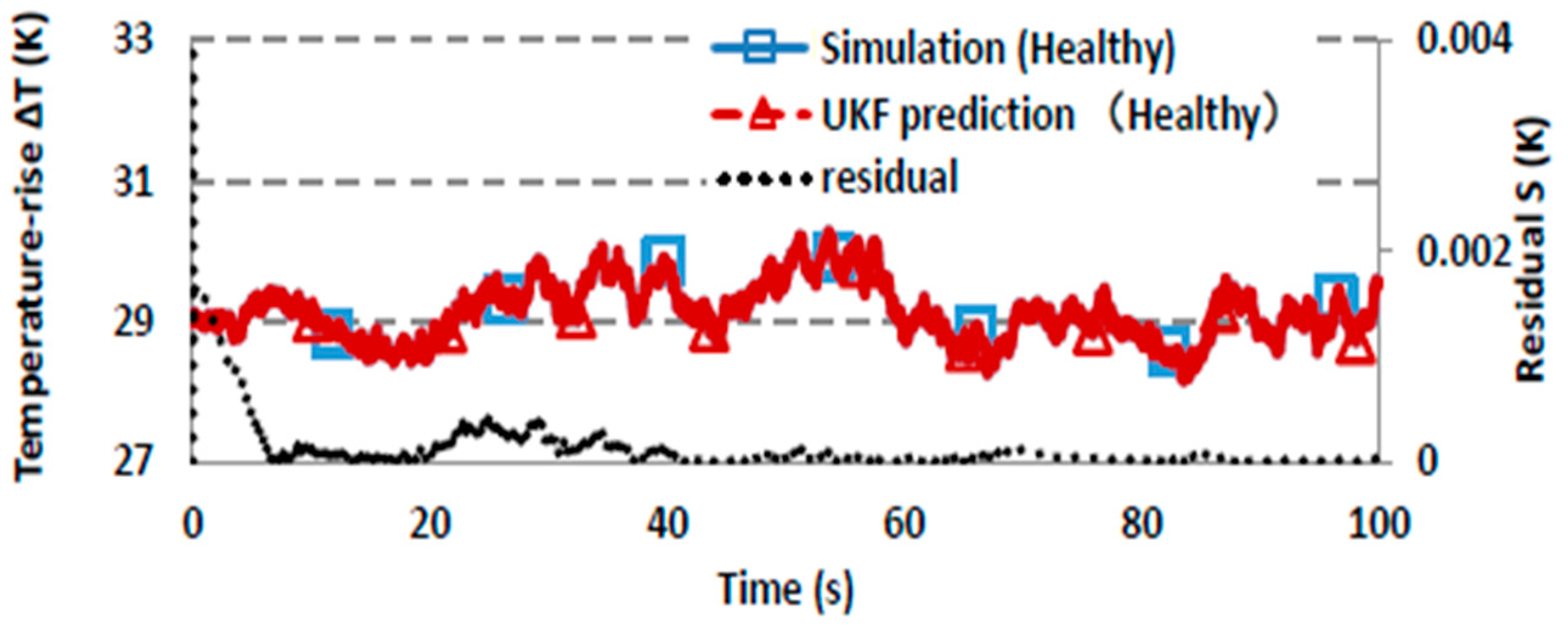
- Fault 2 is presenting such types of failures: As not all subcomponents degradation will actively lead to WT different dynamic response, some failures only affect system performance. Assuming gearbox oil leakage had neglected effects on gearbox heat dissipation and only causes the portion of energy loss through oil to decrease. Unaffected system process parameters (Tg and U) are the input of UKF model. It makes UKF prediction the same as WT output under healthy condition. The actual WT output with fault compared to UKF model (healthy situation) shows consistent temperature rise residual. In this case, UKF model is designed for less sensitive to Fault 2 comparing to Fault 1. However, the different fault signatures can be defined for the two failures identification.
- (iii)
- Fault 3 is presenting such types of failures: key control parameters (pitch angle) of the system are varied due to components (pitch system) failure which directly changes the system response. With the UKF model defined with such parameters as an input controlled vector, the UKF model shows good adaptability for such varied input parameters. It delivers similar estimation output as the WT actually output under faulty condition. A proper UKF model can be re-defined in order to detect these types of failures for example to add additional module to judge the rationality of the input parameters of UKF. Although the UKF designed exhibits lower sensitivity to Fault 3, but Fault 1 can be easily identified from it.
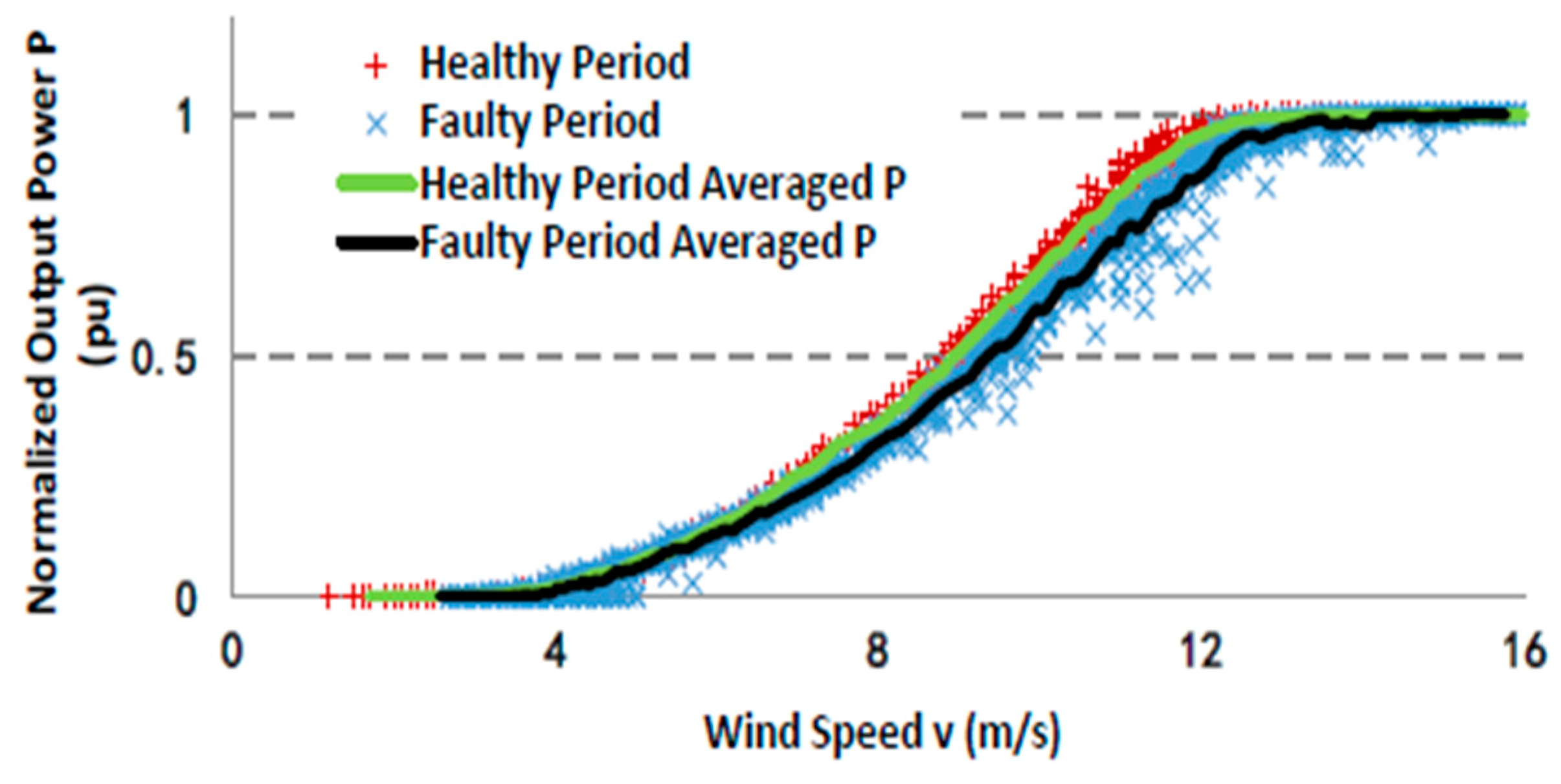
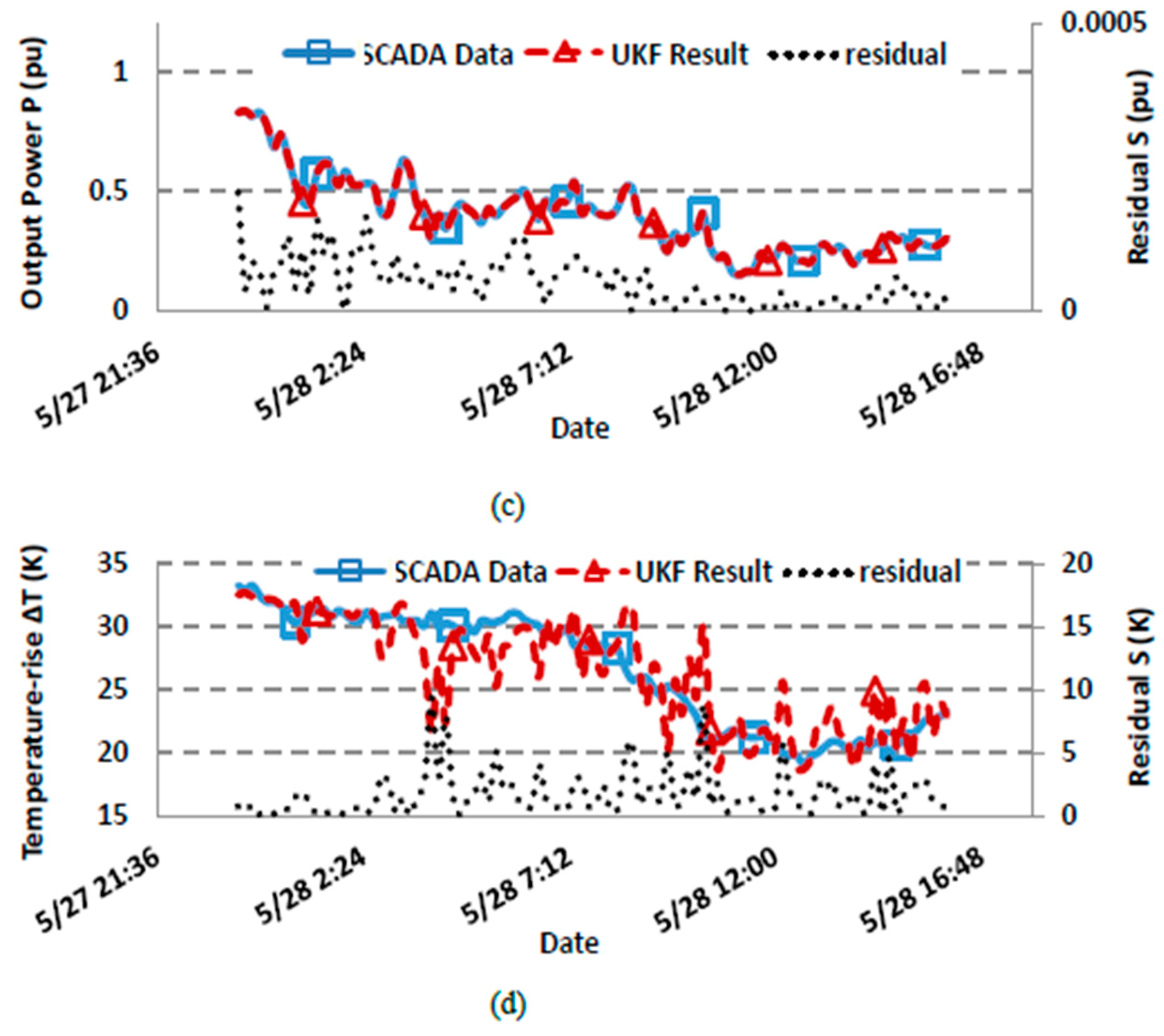
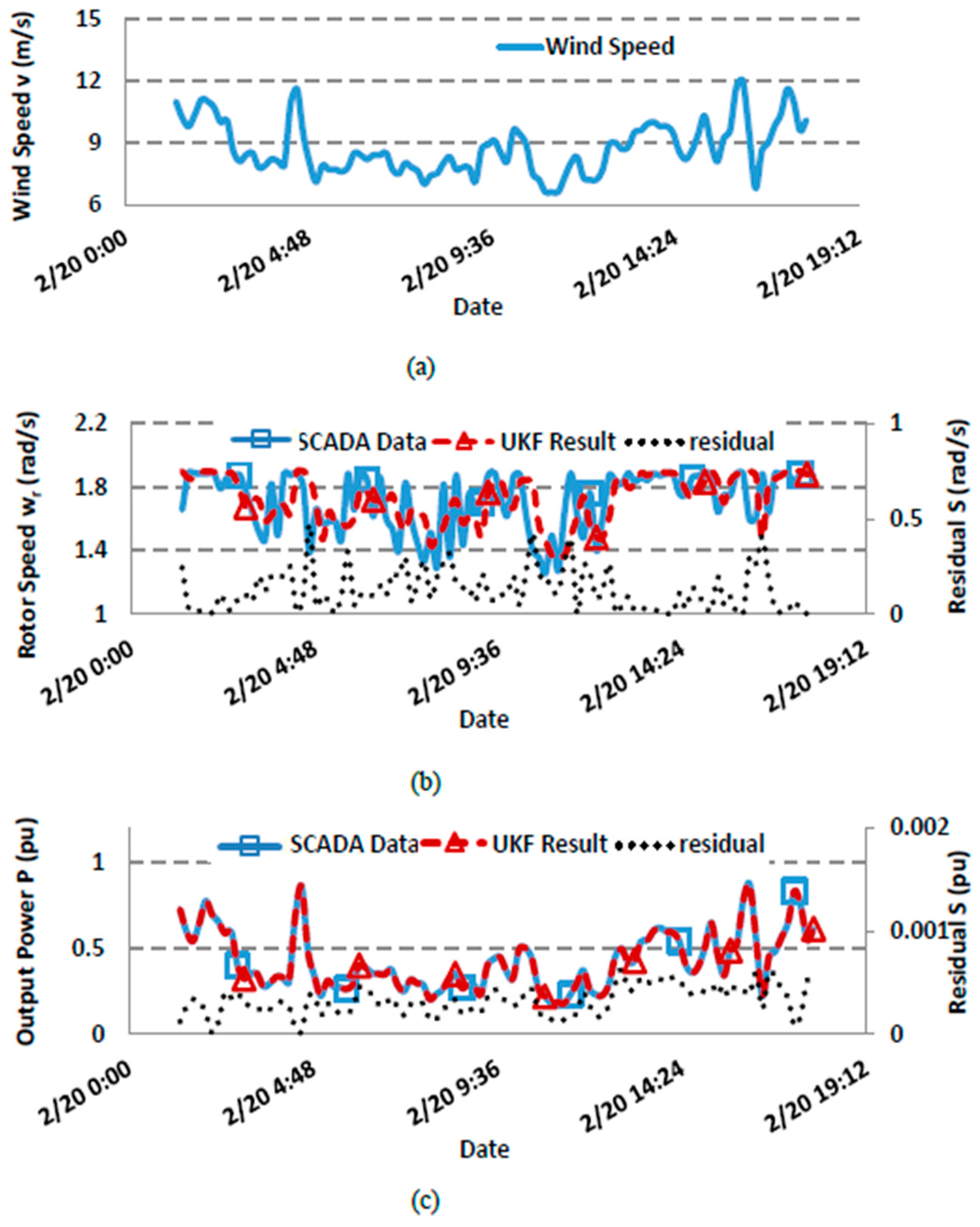
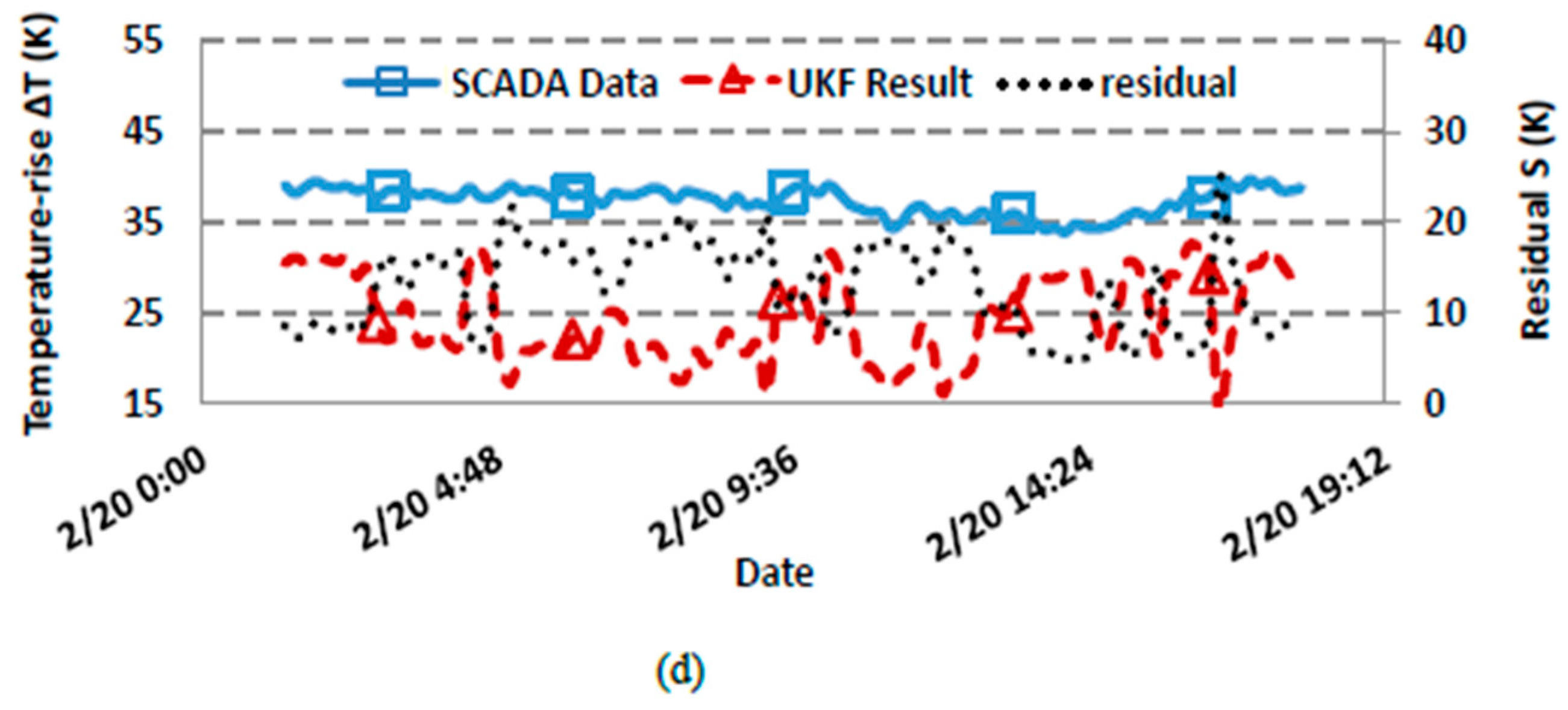
4. SCADA Data Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yang, W.; Tavner, P.J.; Crabtree, C.J.; Feng, Y.; Qiu, Y. Wind turbine condition monitoring: Technical and commercial challenges. Wind Energy 2014, 17, 673–693. [Google Scholar] [CrossRef] [Green Version]
- Márquez, F.P.; Tobias, A.M.; Pérez, J.M.; Papaelias, M. Condition monitoring of wind turbines: Techniques and methods. Renew. Energy 2012, 46, 169–178. [Google Scholar] [CrossRef]
- Lu, B.; Li, Y.; Wu, X.; Yang, Z. A review of recent advances in wind turbine condition monitoring and fault diagnosis. In Proceedings of the IEEE Power Electronics and Machines in Wind Applications 2009, Lincoln, NE, USA, 24–26 June 2009.
- Qiu, Y.; Feng, Y.; Tavner, P.; Richardson, P.; Erdos, G.; Chen, B. Wind turbine SCADA alarm analysis for improving reliability. Wind Energy 2012, 15, 951–966. [Google Scholar] [CrossRef]
- Feng, Y.; Qiu, Y.; Crabtree, C.J.; Long, H.; Tavner, P.J. Monitoring wind turbine gearbox. Wind Energy 2013, 16, 728–740. [Google Scholar] [CrossRef]
- Kim, K.; Parthasarathy, G.; Uluyol, O.; Foslien, W.; Sheng, S.; Fleming, P. Use of SCADA Data for failure detection in wind turbines. In Proceedings of the 2011 Energy Sustainability Conference and Fuel Cell Conference, Washington, DC, USA, 7–10 August 2011.
- Zaher, A.S.; McArthur, S.D.; Infield, D.G.; Patel, Y. Online Wind Turbine Fault Detection through Automated SCADA Data Analysis. Wind Energy 2009, 12, 574–593. [Google Scholar] [CrossRef]
- Qiao, W.; Lu, D. A Survey on Wind Turbine Condition Monitoring and Fault Diagnosis—Part II: Signals and Signal Processing Methods. IEEE Trans. Ind. Electron. 2015, 62, 6536–6545. [Google Scholar] [CrossRef]
- Yang, W.; Court, R.; Jiang, J. Wind turbine condition monitoring by the approach of SCADA data analysis. Renew. Energy 2013, 53, 365–376. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Hong, H. Wind Turbine Fault Diagnosis and Fault-Tolerant Torque Load Control against Actuator Faults. IEEE Trans. Control Syst. Technol. 2015, 23, 1351–1372. [Google Scholar] [CrossRef]
- Odgaard, P.F.; Stoustrup, J. Gear-box fault detection using time-frequency based methods. Annu. Rev. Control 2015, 40, 50–58. [Google Scholar] [CrossRef]
- Venkatasubramanian, V.; Rengaswamy, R.; Yin, K.; Kavuri, S.N. A review of process fault detection and diagnosis: Part I: Quantitative model based methods. Comput. Chem. Eng. 2003, 27, 293–311. [Google Scholar] [CrossRef]
- Wilkinson, M.; Darnell, B.; Van Delft, T.; Harman, K. Comparison of methods for wind turbine condition monitoring with SCADA data. IET Renew. Power Gener. 2014, 8, 390–397. [Google Scholar] [CrossRef]
- Cross, P.; Ma, X. Nonlinear system identification for model-based condition monitoring of wind turbines. Renew. Energy 2014, 71, 166–175. [Google Scholar] [CrossRef] [Green Version]
- Dey, S.; Pisu, P.; Ayalew, B. A comparative study of three fault diagnosis schemes for wind turbines. IEEE Trans. Control Syst. Technol. 2015, 23, 1853–1868. [Google Scholar] [CrossRef]
- Qiu, Y.; Feng, Y.; Sun, J.; Zhang, W.; Infield, D. Applying thermophysics for wind turbine drivetrain fault diagnosis using SCADA data. IET Renew. Power Gener. 2016, 10, 661–668. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Zhang, W.; Cao, M.; Feng, Y.; Infield, D. An electro-thermal analysis of a variable-speed doubly-fed induction generator in a wind turbine. Energies 2015, 8, 3386–3402. [Google Scholar] [CrossRef] [Green Version]
- Mengnan, C.; Yingning, Q.; Yanhui, F.; Hao, W.; Infield, D. Wind turbine fault diagnosis based on unscented Kalman Filter. In Proceedings of the International Conference on Renewable Power Generation (RPG 2015), Beijing, China, 17–18 October 2015.
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Gonçalves, D.E.; Fernandes, C.M.; Martins, R.C.; Seabra, J.H. Torque loss in a gearbox lubricated with wind turbine gear oils. Lubr. Sci. 2013, 25, 297–311. [Google Scholar] [CrossRef]
- Bergman, T.L.; Incropera, F.P.; DeWitt, D.P.; Lavine, A.S. Fundamentals of Heat and Mass Transfer, 6th ed.; John Wiley & Sons: New York, NY, USA, 2006; p. 100. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; Wiley-Interscience: New York, NY, USA, 2006. [Google Scholar]
- Mirzaee, A.; Salahshoor, K. Fault diagnosis and accommodation of nonlinear systems based on multiple-model adaptive unscented Kalman Filter and switched MPC and H-infinity loop-shaping controller. J. Process Control 2012, 22, 626–634. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| air density | 1.225 kg/m3 | |
| R | wind rotor radius | 31 m |
| Jr | rotor rotational inertia | 2,460,106 kg∙m2 |
| Jg | generator rotational inertia | 52 kg∙m2 |
| N | drive ratio | 100 |
| ω1 | synchronous speed | 157 rad/s |
| p1 | pole number | 2 |
| m1 | phase number | 3 |
| rs | stator resistance | 0.029 Ω |
| rr | converted rotor resistance | 0.023 Ω |
| xs | stator leakage reactance | 0.18 Ω |
| xr | converted rotor leakage reactance | 0.18 Ω |
| C | correction factor | 0.811 |
| Fault Cases | System Process Simulation | Cascaded UKF Model | ||
|---|---|---|---|---|
| System Parameters Variation | State Space Vector and Control Vectors | Monitoring Performances | Residual Tendencies | |
| Fault 1 | Ƞ ↓ | UKF1: [ωr, ΔT]T, [v,β]T UKF2: Tg, [ωg, U]T | ΔT, ωr, Tg, P | S(ΔT) ↑, S(ωr) ↑, S(Tg) ↑, S(P) ↑ |
| Fault 2 | q ↓ | ΔT, ωr, Tg, P | S(ΔT) ↑, S(ωr)~0, S(Tg)~0, S(P)~0 | |
| Fault 3 | β (=45°) | ΔT, ωr, Tg, P | S(ΔT)~0, S(ωr)~0, S(Tg)~0, S(P)~0 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, M.; Qiu, Y.; Feng, Y.; Wang, H.; Li, D. Study of Wind Turbine Fault Diagnosis Based on Unscented Kalman Filter and SCADA Data. Energies 2016, 9, 847. https://doi.org/10.3390/en9100847
Cao M, Qiu Y, Feng Y, Wang H, Li D. Study of Wind Turbine Fault Diagnosis Based on Unscented Kalman Filter and SCADA Data. Energies. 2016; 9(10):847. https://doi.org/10.3390/en9100847
Chicago/Turabian StyleCao, Mengnan, Yingning Qiu, Yanhui Feng, Hao Wang, and Dan Li. 2016. "Study of Wind Turbine Fault Diagnosis Based on Unscented Kalman Filter and SCADA Data" Energies 9, no. 10: 847. https://doi.org/10.3390/en9100847
APA StyleCao, M., Qiu, Y., Feng, Y., Wang, H., & Li, D. (2016). Study of Wind Turbine Fault Diagnosis Based on Unscented Kalman Filter and SCADA Data. Energies, 9(10), 847. https://doi.org/10.3390/en9100847