
A Current Control Approach for an Abnormal Grid Supplied Ultra Sparse Z-Source Matrix Converter with a Particle Swarm Optimization Proportional-Integral Induction Motor Drive Controller


 and
and 
Abstract
:1. Introduction
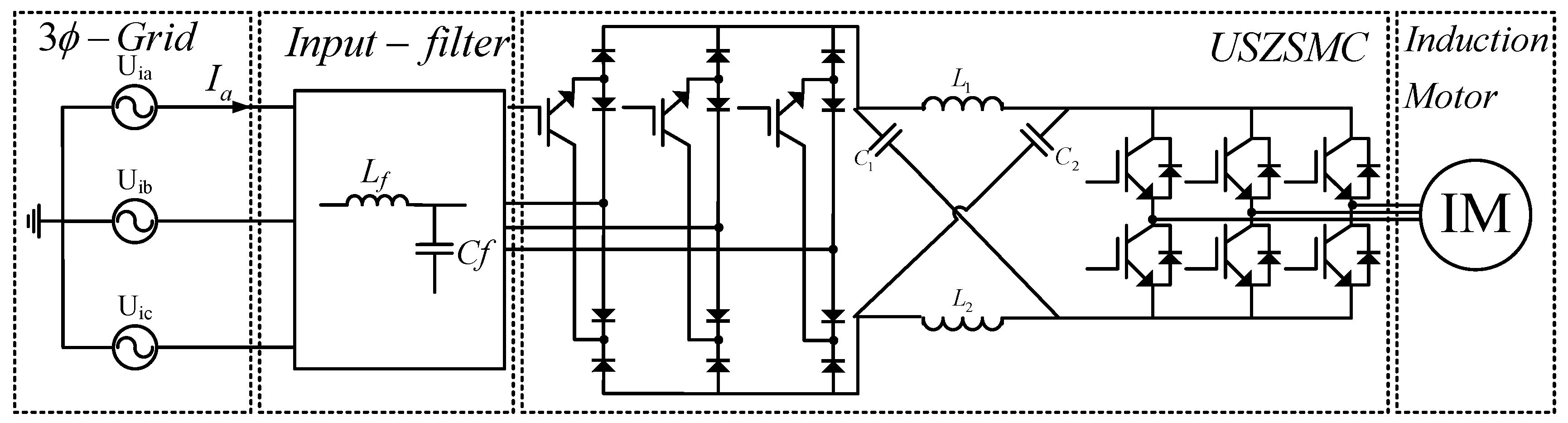
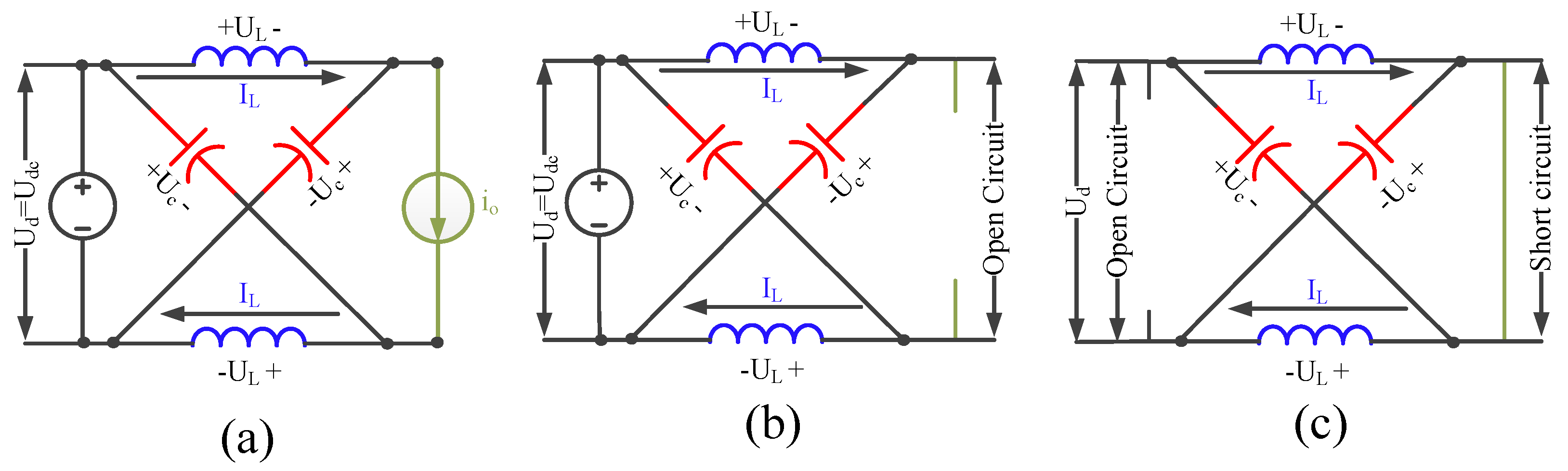
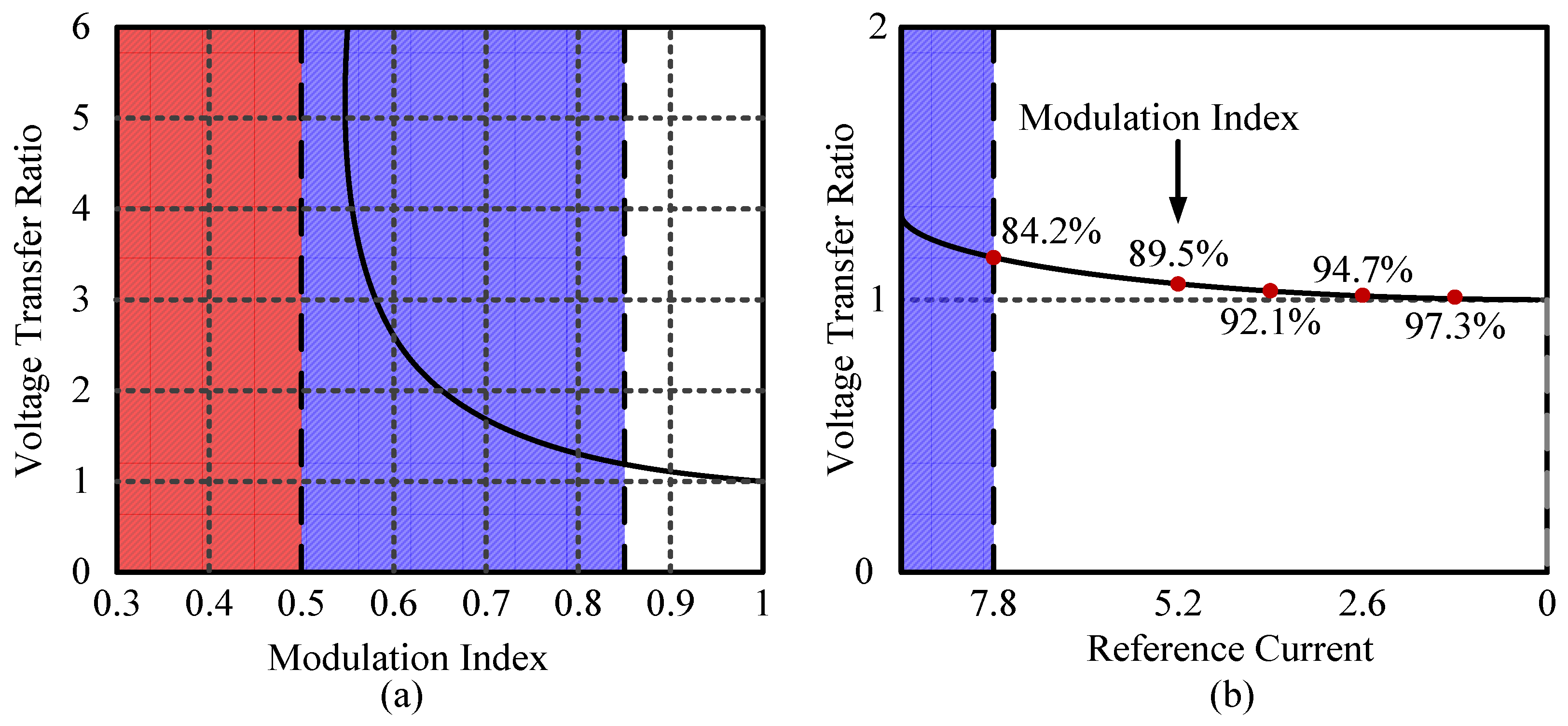
2. Z-Source and Voltage Transfer Ratio
- (1)
- Quasi-Direct AC/AC conversion with no DC-link energy storage elements.
- (2)
- Sinusoidal input current in phase with mains voltage.
- (3)
- Zero DC-link current commutation scheme resulting in lower modulation complexity and very high reliability.
- (4)
- Low complexity of power circuit/power modules available.
- (5)
- The ultra-sparse matrix converter shows extremely low realization effort, in case unidirectional power flow can be accepted (admissible displacement of 30° the input current fundamental and input voltage, as well as for the output voltage fundamental and output current), accordingly, a possible application area would be variable speed permanent-magnet synchronous motor (PMSM) or IM drives with low dynamics.
3. The Current Control of Voltage Source Inverter (VSI)
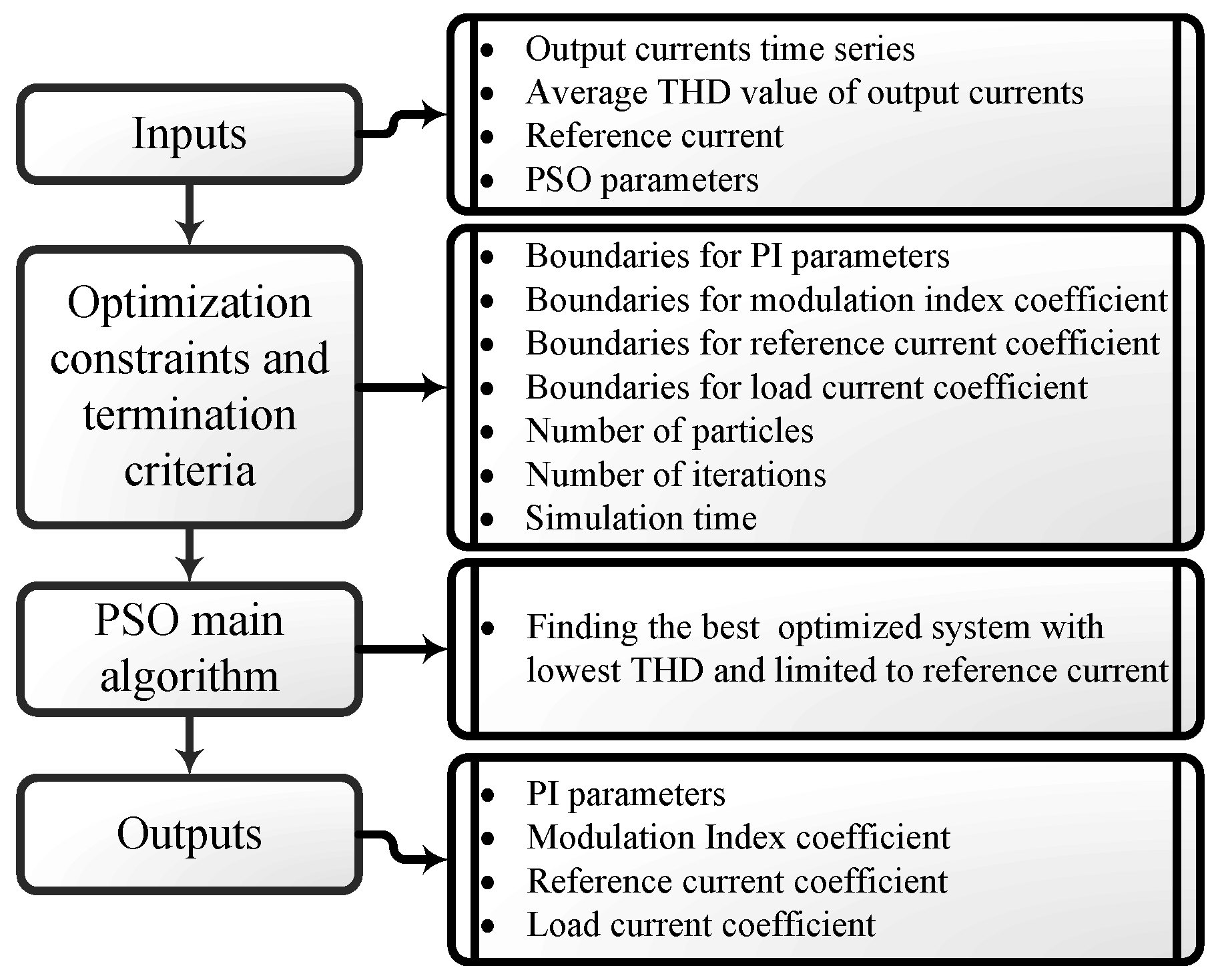
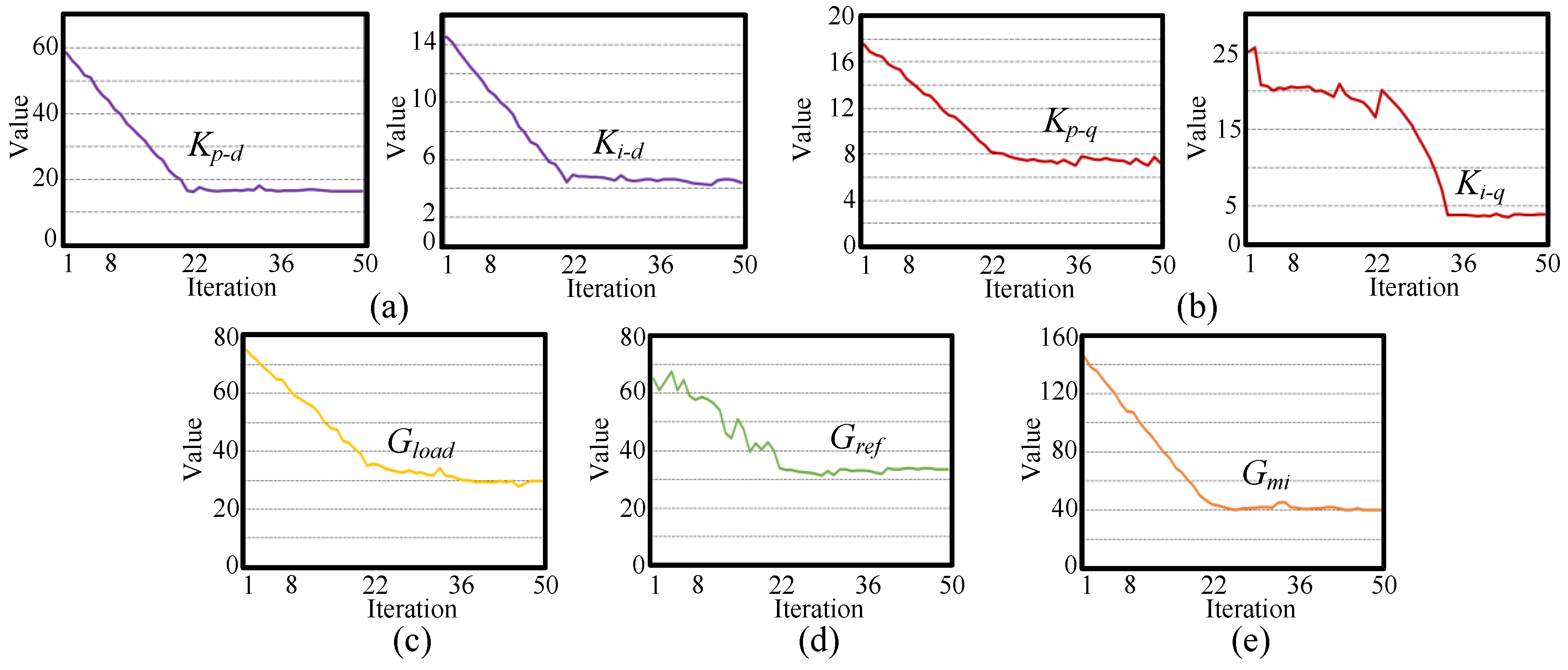
4. The Optimum Control
- Their memory of their own best position or local best (lb), which allows it to remember the best position in the feasible search space that has been visited, and
- Knowledge of the global or their neighborhood’s best or global best (gb), which is the best value obtained so far by any particle in the neighborhood of the particle.
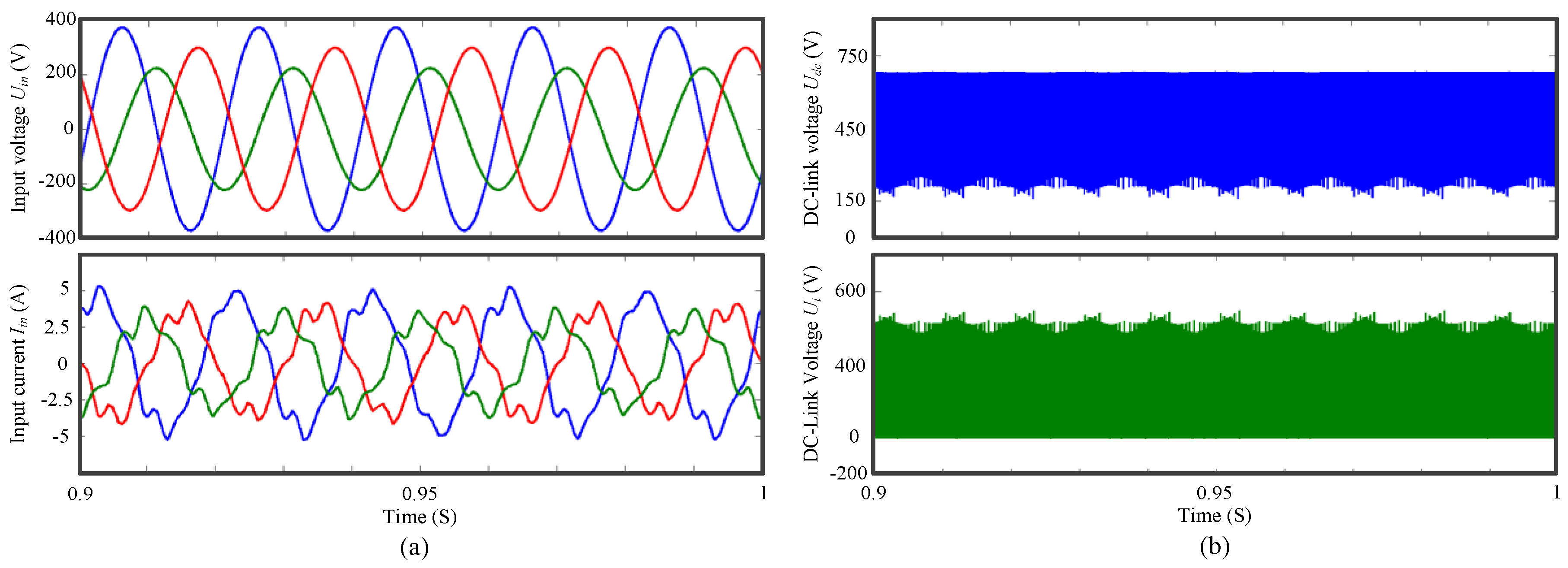
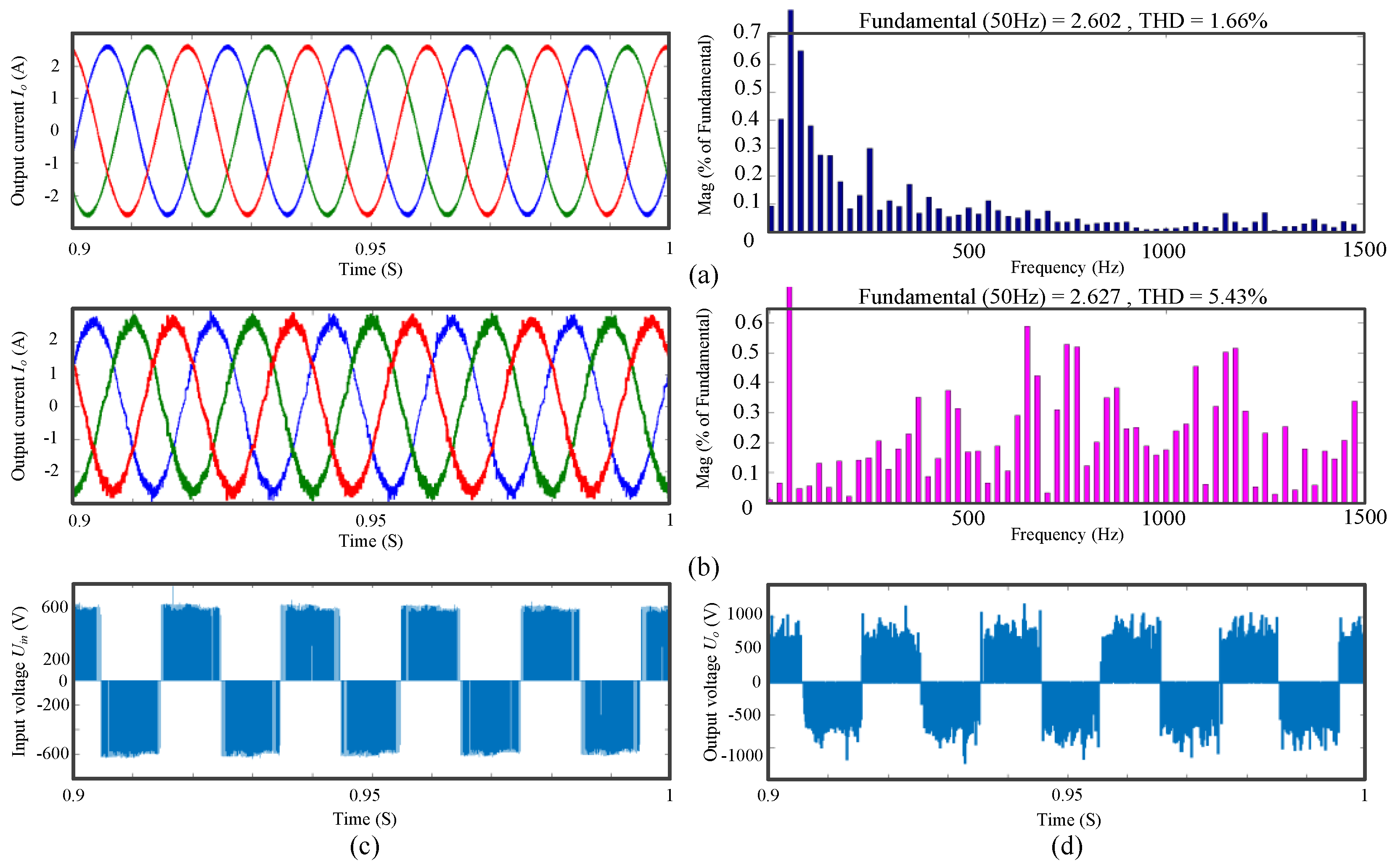
5. Simulation Results
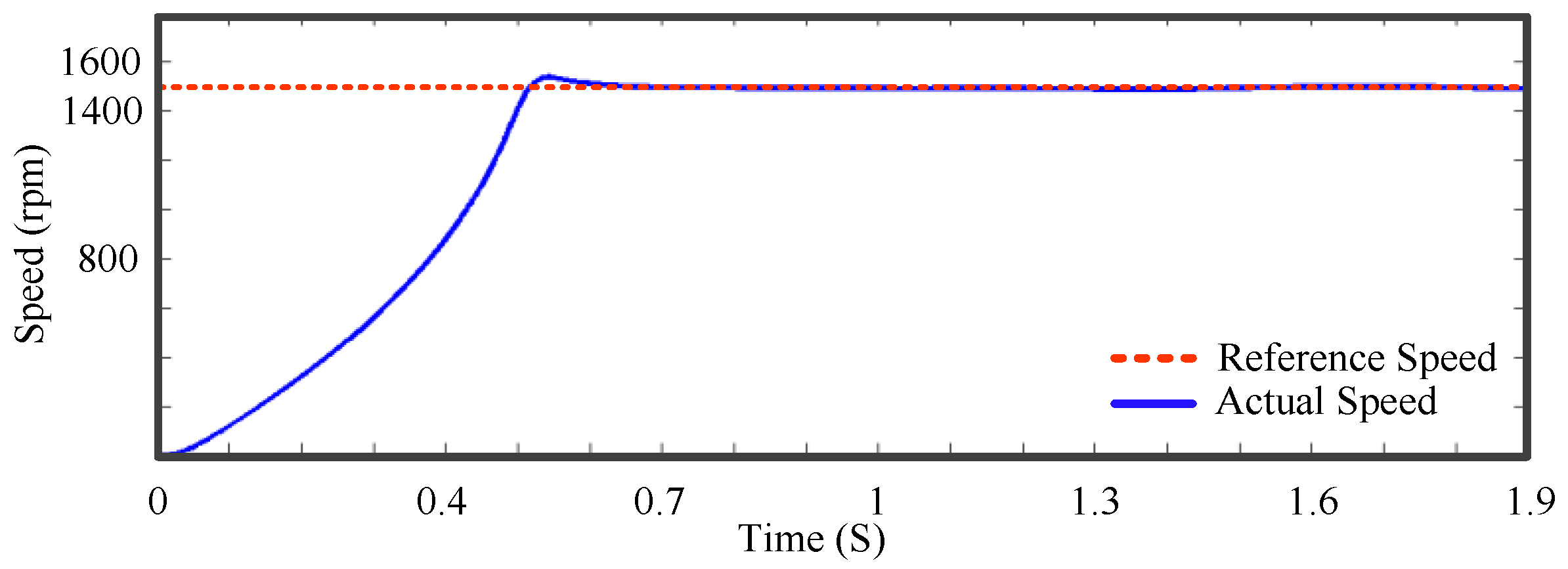
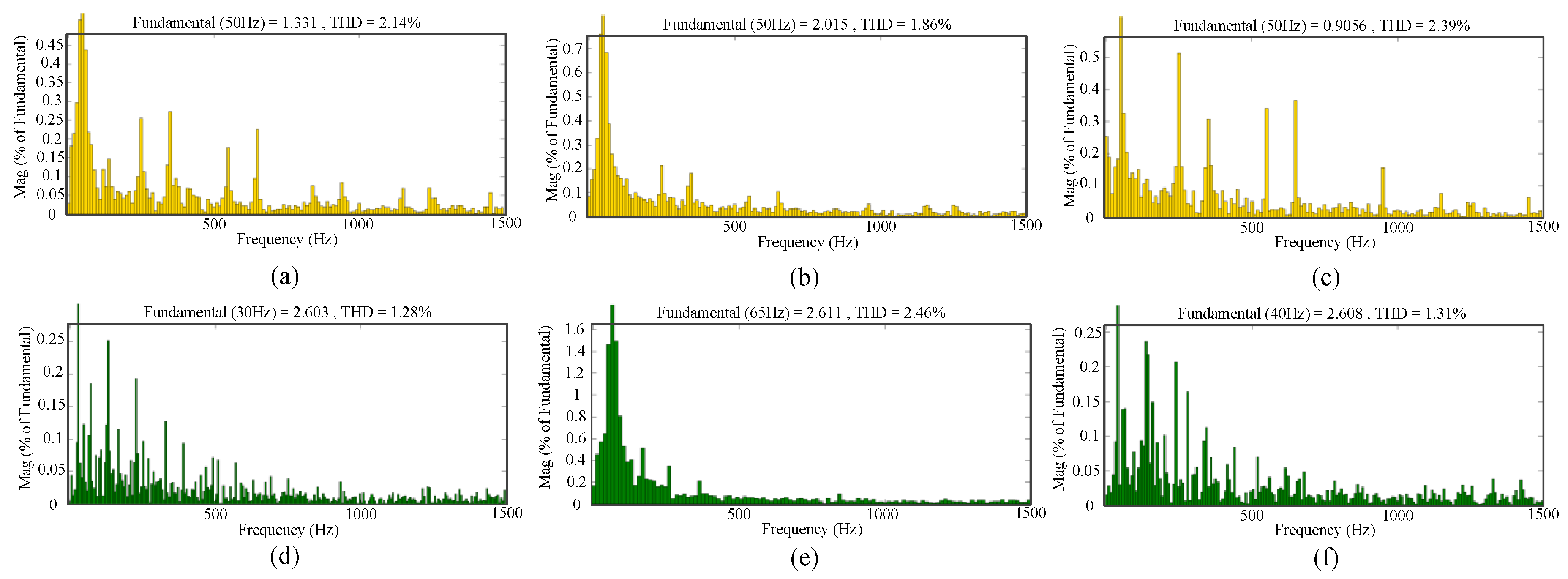
5.1. Steady-State Response
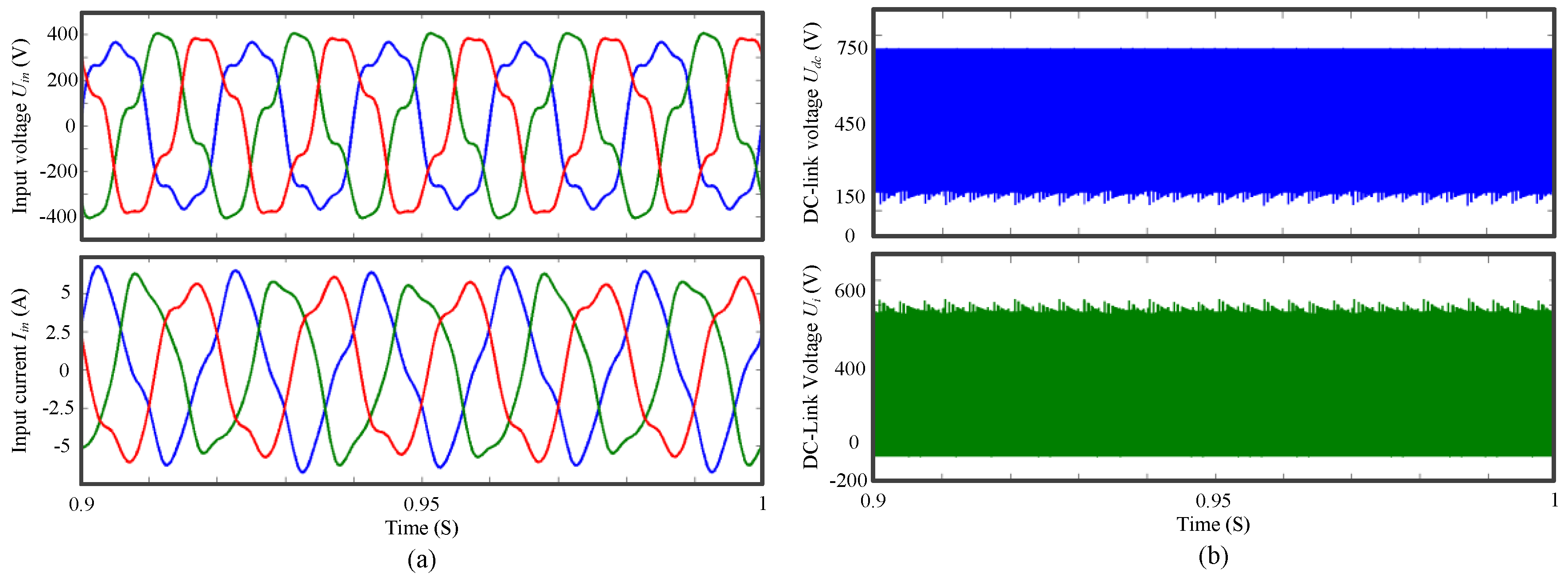
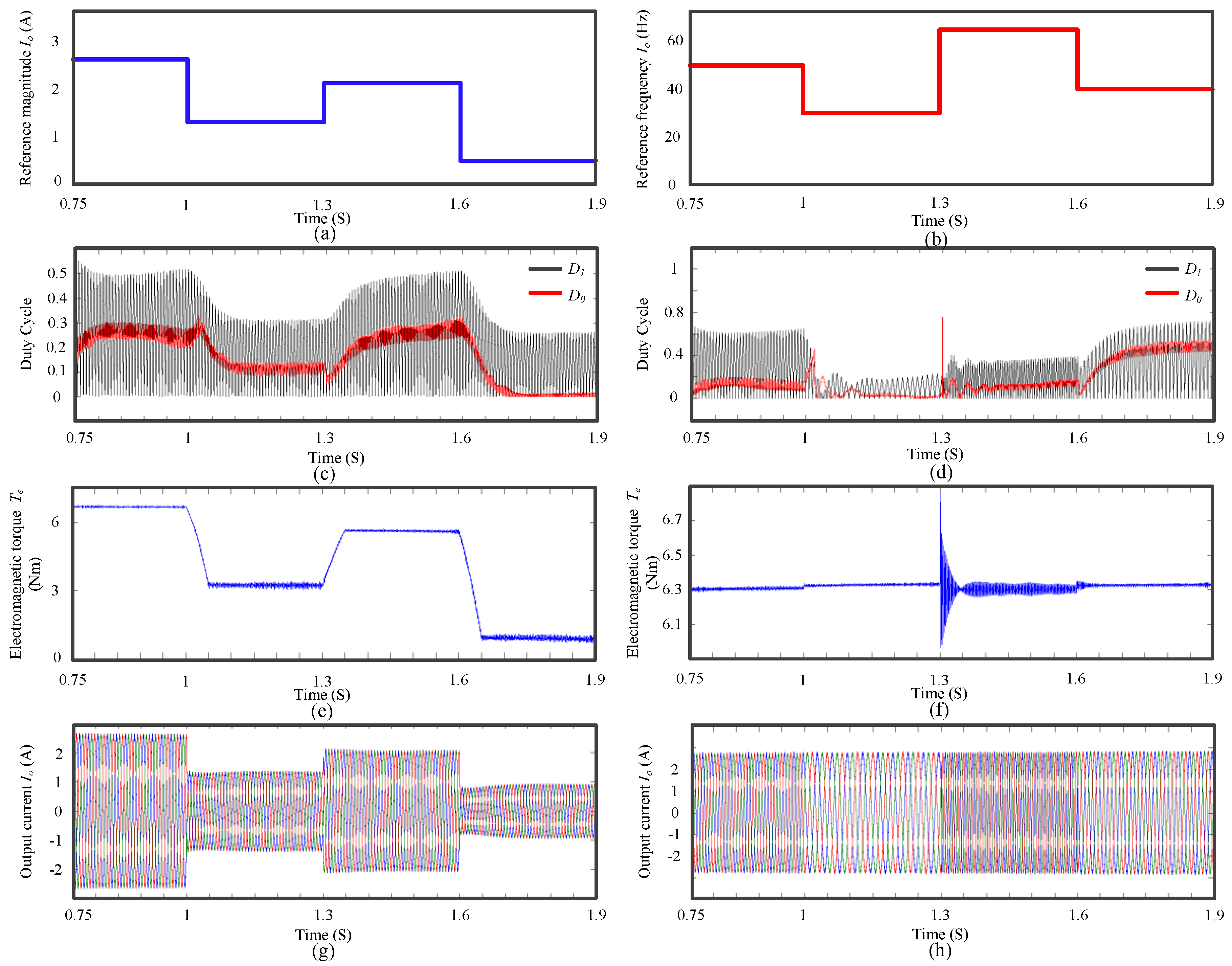
5.2. Dynamic Response
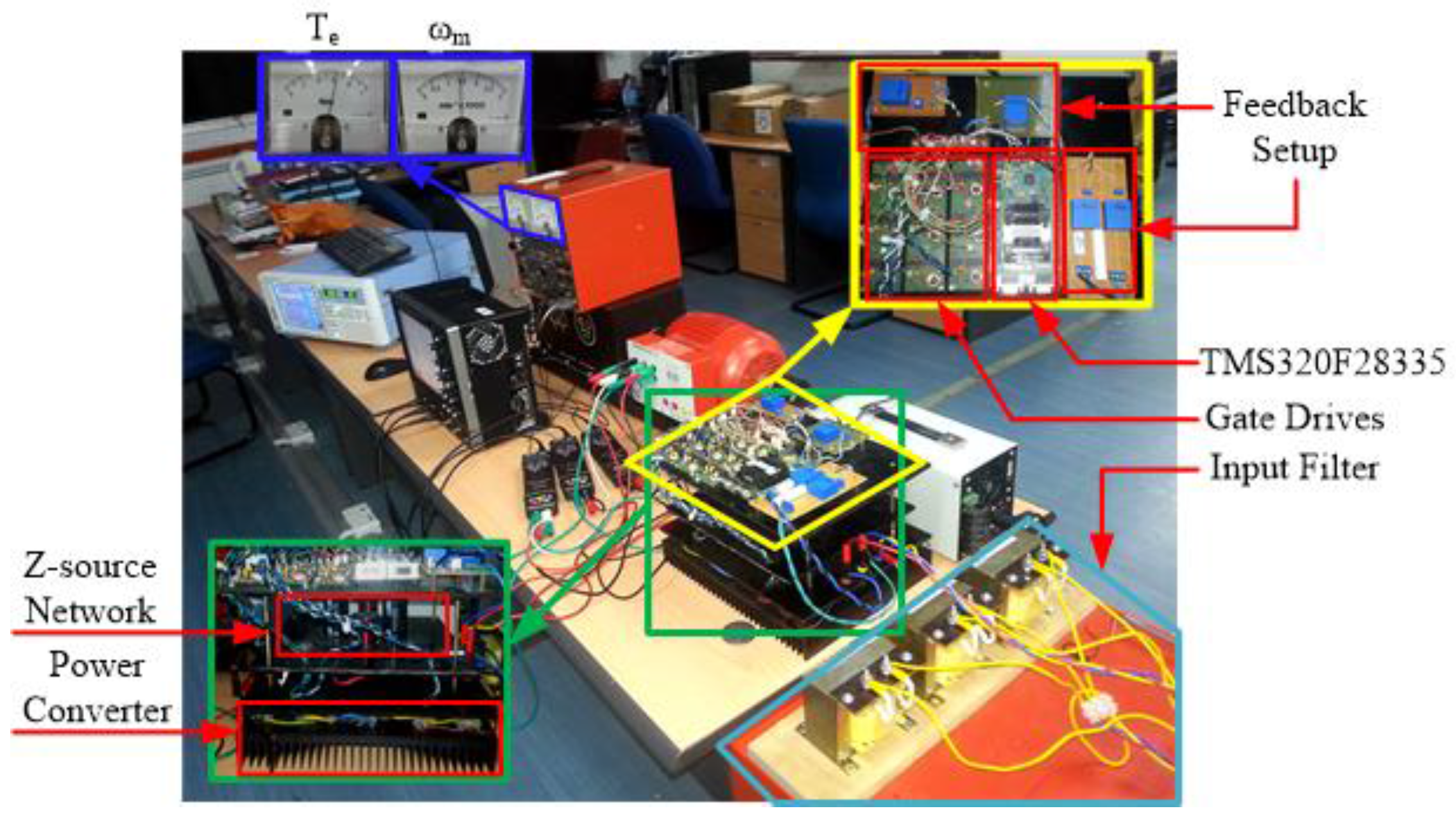
6. Experimental Results
6.1. Steady-State Response
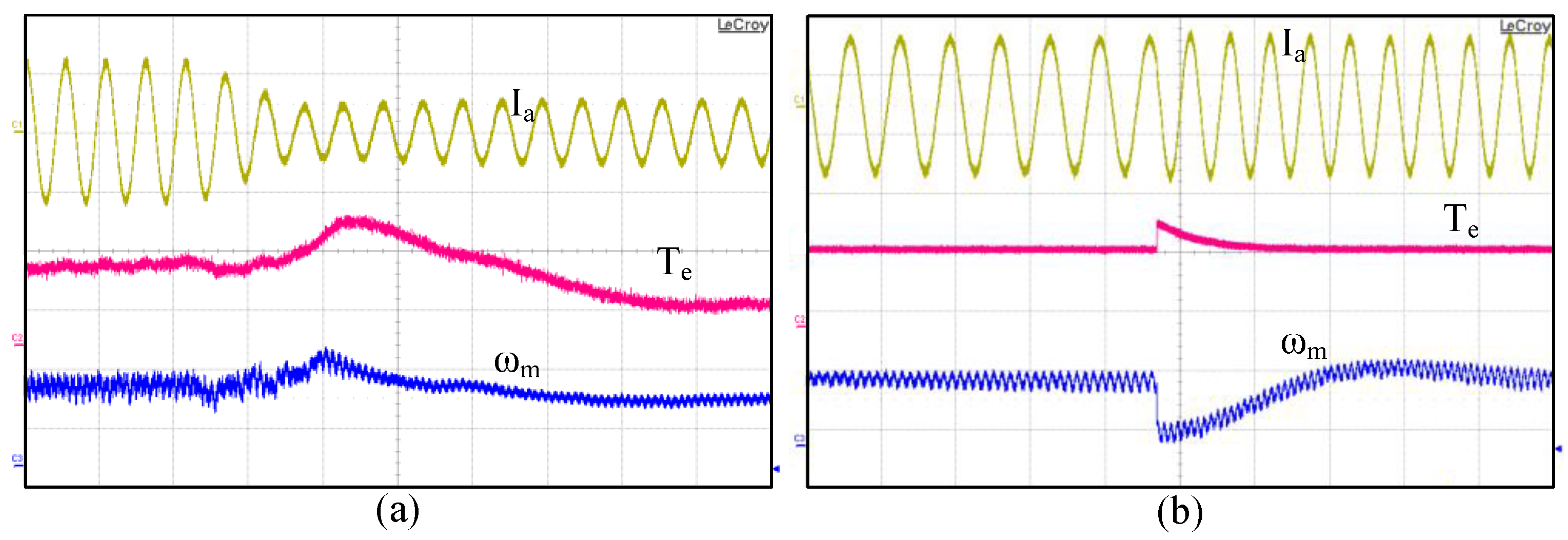
6.2. Dynamic Response
7. Discussion
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brunson, C.; Empringham, L.; de Lillo, L.; Wheeler, P.; Clare, J. Open-Circuit Fault Detection and Diagnosis in Matrix Converters. IEEE Trans. Power Electron. 2015, 30, 2840–2847. [Google Scholar] [CrossRef]
- Sun, Y.; Li, X.; Su, M.; Wang, H.; Dan, H.; Xiong, W. Indirect Matrix Converter-Based Topology and Modulation Schemes for Enhancing Input Reactive Power Capability. IEEE Trans. Power Electron. 2015, 30, 4669–4681. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Loh, P.C.; Blaabjerg, F. A three-phase dual-input matrix converter for grid integration of two AC type energy resources. IEEE Trans. Ind. Electron. 2013, 60, 20–30. [Google Scholar] [CrossRef]
- Andreu, J.; Kortabarria, I.; Ormaetxea, E.; Ibarra, E.; Martin, J.L.; Apiñaniz, S. A step forward towards the development of reliable matrix converters. IEEE Trans. Ind. Electron. 2012, 59, 167–183. [Google Scholar] [CrossRef]
- Sebtahmadi, S.; Pirasteh, H.; Kaboli, S.; Radan, A.; Mekhilef, S. A 12-Sector Space Vector Switching Scheme for Performance Improvement of Matrix-Converter-Based DTC of IM Drive. IEEE Trans. Power Electron. 2015, 30, 3804–3817. [Google Scholar] [CrossRef]
- Song, W.; Zhong, Y.; Zhang, H.; Sun, X.; Zhang, Q.; Wang, W. A study of Z-source dual-bridge matrix converter immune to abnormal input voltage disturbance and with high voltage transfer ratio. IEEE Trans. Ind. Inform. 2013, 9, 828–838. [Google Scholar] [CrossRef]
- Karaman, E.; Farasat, M.; Trzynadlowski, A.M. A comparative study of series and cascaded Z-source matrix converters. IEEE Trans. Ind. Electron. 2014, 61, 5164–5173. [Google Scholar] [CrossRef]
- Aten, M.; Towers, G.; Whitley, C.; Wheeler, P.; Clare, J.; Bradley, K. Reliability comparison of matrix and other converter topologies. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 867–875. [Google Scholar] [CrossRef]
- Li, X.; Su, M.; Sun, Y.; Dan, H.; Xiong, W. Modulation strategies based on mathematical construction method for matrix converter under unbalanced input voltages. IET Power Electron. 2013, 6, 434–445. [Google Scholar] [CrossRef]
- Yousefi-Talouki, A.; Pellegrino, G.; Mengoni, M.; Zarri, L. Self-commissioning algorithm for matrix converter, nonlinearity compensation. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 4077–4083.
- Schönberger, J.; Friedli, T.; Round, S.; Kolar, J. An ultra sparse matrix converter with a novel active clamp circuit. In Proceedings of the Power Conversion Conference (PCC’07), Nagoya, Japan, 2–5 April 2007; pp. 784–791.
- Siwakoti, Y.P.; Peng, F.Z.; Blaabjerg, F.; Loh, P.C.; Town, G.E. Impedance-source networks for electric power conversion part I: A topological review. IEEE Trans. Power Electron. 2015, 30, 699–716. [Google Scholar] [CrossRef]
- Trentin, A.; Zanchetta, P.; Empringham, L.; de Lillo, L.; Wheeler, P.; Clare, J. Experimental comparison between direct matrix converter and indirect matrix converter based on efficiency. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 2580–2587.
- Rohouma, W.; Zanchetta, P.; Wheeler, P.W.; Empringham, L. A Four-Leg Matrix Converter Ground Power Unit with Repetitive Voltage Control. IEEE Trans. Power Electron. 2015, 62, 2032–2040. [Google Scholar] [CrossRef]
- Corres, J.M.; Bravo, J.; Arregui, F.J.; Matias, I.R. Unbalance and harmonics detection in induction motors using an optical fiber sensor. IEEE Sens. J. 2006, 6, 605–612. [Google Scholar] [CrossRef]
- Al-Badri, M.; Pillay, P.; Angers, P. A Novel Full-Load Efficiency Estimation Technique for Induction Motors Operating with Unbalanced Voltages. IEEE Trans. Ind. Appl. 2016, 52, 2843–2855. [Google Scholar] [CrossRef]
- Kai, S.; Daning, Z.; Lipei, H.; Matsuse, K. Compensation control of matrix converter fed induction motor drive under abnormal input voltage conditions. In Proceedings of the 2004 IEEE 39th IAS Annual Meeting Industry Applications Conference, Seattle, WA, USA, 3–7 October 2004; pp. 1–630.
- Nielsen, P.; Blaabjerg, F.; Pedersen, J.K. Space vector modulated matrix converter with minimized number of switchings and a feedforward compensation of input voltage unbalance. In Proceedings of the 1996 International Conference on Power Electronics, Drives and Energy Systems for Industrial Growth, Delhi, India, 8–11 January 1996; Volume 2, pp. 833–839.
- Casadei, D.; Serra, G.; Tani, A. Reduction of the input current harmonic content in matrix converters under input/output unbalance. IEEE Trans. Ind. Electron. 1998, 45, 401–411. [Google Scholar] [CrossRef]
- Gozde, H. Comparative analysis of swarm optimization-based control method for direct matrix converter. Electr. Eng. 2015, 97, 1–13. [Google Scholar] [CrossRef]
- Ruiz-Cruz, R.; Sanchez, E.N.; Ornelas-Tellez, F.; Loukianov, A.G.; Harley, R.G. Particle swarm optimization for discrete-time inverse optimal control of a doubly fed induction generator. IEEE Trans. Cybern. 2013, 43, 1698–1709. [Google Scholar] [CrossRef] [PubMed]
- Siwakoti, Y.P.; Blaabjerg, F.; Loh, P.C.; Town, G.E. High-voltage boost quasi-Z-source isolated DC/DC converter. IET Power Electron. 2014, 7, 2387–2395. [Google Scholar] [CrossRef]
- Zheng, P.F. Z-source inverter. IEEE Trans. Ind. Appl. 2003, 39, 504–510. [Google Scholar] [CrossRef]
- Liu, S.; Ge, B.; Jiang, X.; Abu-Rub, H.; Peng, F.Z. Comparative Evaluation of Three Z-Source/Quasi-Z-Source Indirect Matrix Converters. IEEE Trans. Ind. Electron. 2015, 62, 692–701. [Google Scholar] [CrossRef]
- Shen, M.; Joseph, A.; Wang, J.; Peng, F.Z.; Adams, D.J. Comparison of traditional inverters and Z-source inverter for fuel cell vehicles. IEEE Trans. Power Electron. 2007, 22, 1453–1463. [Google Scholar] [CrossRef]
- Enjeti, P.N.; Choudhury, S.A. A new control strategy to improve the performance of a PWM AC to DC converter under unbalanced operating conditions. IEEE Trans. Power Electron. 1993, 8, 493–500. [Google Scholar] [CrossRef]
- Liu, X.; Loh, P.C.; Wang, P.; Han, X. Improved modulation schemes for indirect Z-source matrix converter with sinusoidal input and output waveforms. IEEE Trans. Power Electron. 2012, 27, 4039–4050. [Google Scholar] [CrossRef]
- Wijekoon, T.; Klumpner, C.; Zanchetta, P.; Wheeler, P.W. Implementation of a hybrid AC–AC direct power converter with unity voltage transfer. IEEE Trans. Power Electron. 2008, 23, 1918–1926. [Google Scholar] [CrossRef]
- Klumpner, C. A hybrid indirect matrix converter immune to unbalanced voltage supply, with reduced switching losses and improved voltage transfer ratio. In Proceedings of the 21st Annual IEEE Applied Power Electronics Conference and Exposition (APEC’06), Dallas, TX, USA, 19–23 March 2006; p. 7.
- Park, K.; Lee, K.-B.; Blaabjerg, F. Improving output performance of a Z-source sparse matrix converter under unbalanced input-voltage conditions. IEEE Trans. Power Electron. 2012, 27, 2043–2054. [Google Scholar] [CrossRef]
- Kolar, J.W.; Schafmeister, F.; Round, S.D.; Ertl, H. Novel three-phase AC–AC sparse matrix converters. IEEE Trans. Power Electron. 2007, 22, 1649–1661. [Google Scholar] [CrossRef]
- Round, S.; Schafmeister, F.; Heldwein, M.; Pereira, E.; Serpa, L.; Kolar, J. Comparison of performance and realization effort of a very sparse matrix converter to a voltage DC link pwm inverter with active front end. Inst. Electr. Eng. J. (Ind. Appl. Mag.) 2006, 126, 578–588. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Symbol | Value |
|---|---|---|
| Rated power | S | 1100 VA |
| Rated torque | Te,base | 6.3 Nm |
| Rated voltage | Vl−l | 380 V |
| Number of poles | 2P | 2 |
| Rated frequency | f | 50 Hz |
| Stator resistance | Rs | 21.405 Ω |
| Stator reactance | Xls | 1.842 Ω |
| Mutual reactance | Xm | 54.09 Ω |
| Rotor resistance | R′r | 22.395 Ω |
| Rotor reactance | X′lr | 1.834 Ω |
| Friction factor | J | 0.0131 kg/m2 |
| Reference | Element Quantity of MC Topology | Voltage Transfer Ratio | Element Quantity of Z-Source | Z-Source Elements | Switching Frequency (kHz) | Output Current THD | Abnormal Ratio | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sw | D | L | C | Sw | D | L (H) | C (F) | |||||
| [6] | 15 | 18 | >1 | 2 | 2 | 0 | 0 | 0.65 m | 12.4 µ | 10 | 1.73% | 20% |
| [27] | 9 | 18 | >1 | 2 | 2 | 0 | 0 | 20 m | 470 μ | 5 * | Not mentioned | Balanced |
| [28] | 18 | 18 | 1 | 1 | 1 | 4 | 5 | 1.1 m | 20 μ | 10 | 15% | 10% |
| [29] | 18 | 18 | 0.955 | 0 | 1 | 4 | 4 | - | 1.5 m | 10 | Not mentioned | 10% |
| [30] | 12 | 30 | 1.15 | 2 | 2 | 1 | 1 | 3 m | 60 μ | 7.5 | 5.12% | 30% |
| This work | 9 | 18 | >1 | 2 | 2 | 0 | 0 | 0.25 m | 170 μ | 10 | 1.66% | 40% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sebtahmadi, S.S.; Borhan Azad, H.; Islam, D.; Seyedmahmoudian, M.; Horan, B.; Mekhilef, S. A Current Control Approach for an Abnormal Grid Supplied Ultra Sparse Z-Source Matrix Converter with a Particle Swarm Optimization Proportional-Integral Induction Motor Drive Controller. Energies 2016, 9, 899. https://doi.org/10.3390/en9110899
Sebtahmadi SS, Borhan Azad H, Islam D, Seyedmahmoudian M, Horan B, Mekhilef S. A Current Control Approach for an Abnormal Grid Supplied Ultra Sparse Z-Source Matrix Converter with a Particle Swarm Optimization Proportional-Integral Induction Motor Drive Controller. Energies. 2016; 9(11):899. https://doi.org/10.3390/en9110899
Chicago/Turabian StyleSebtahmadi, Seyed Sina, Hanieh Borhan Azad, Didarul Islam, Mehdi Seyedmahmoudian, Ben Horan, and Saad Mekhilef. 2016. "A Current Control Approach for an Abnormal Grid Supplied Ultra Sparse Z-Source Matrix Converter with a Particle Swarm Optimization Proportional-Integral Induction Motor Drive Controller" Energies 9, no. 11: 899. https://doi.org/10.3390/en9110899
APA StyleSebtahmadi, S. S., Borhan Azad, H., Islam, D., Seyedmahmoudian, M., Horan, B., & Mekhilef, S. (2016). A Current Control Approach for an Abnormal Grid Supplied Ultra Sparse Z-Source Matrix Converter with a Particle Swarm Optimization Proportional-Integral Induction Motor Drive Controller. Energies, 9(11), 899. https://doi.org/10.3390/en9110899