
Basic Characteristics and Design of a Novel Hybrid Magnetic Bearing for Wind Turbines


Abstract
:1. Introduction
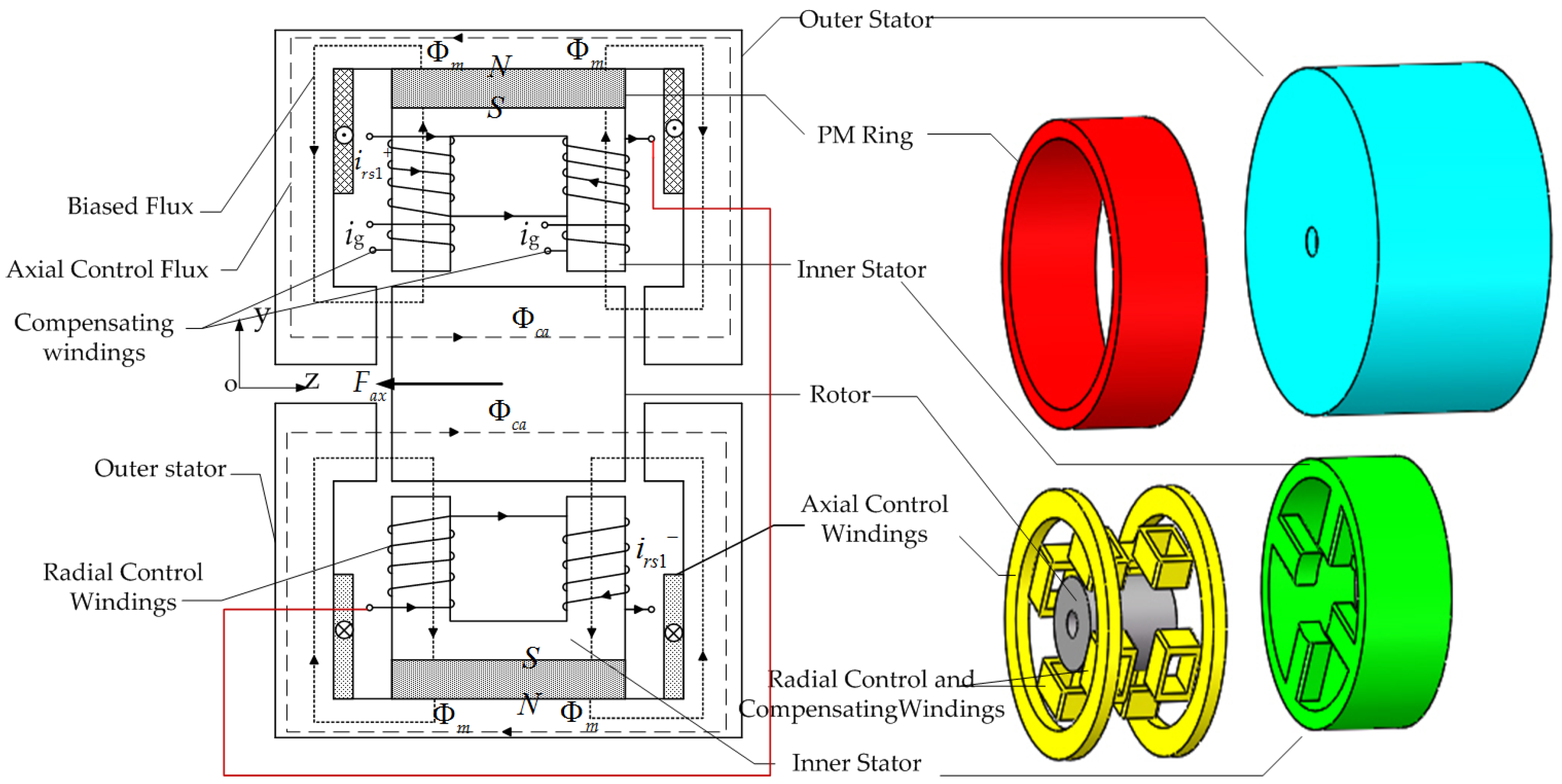
2. Configuration and Operation Principle
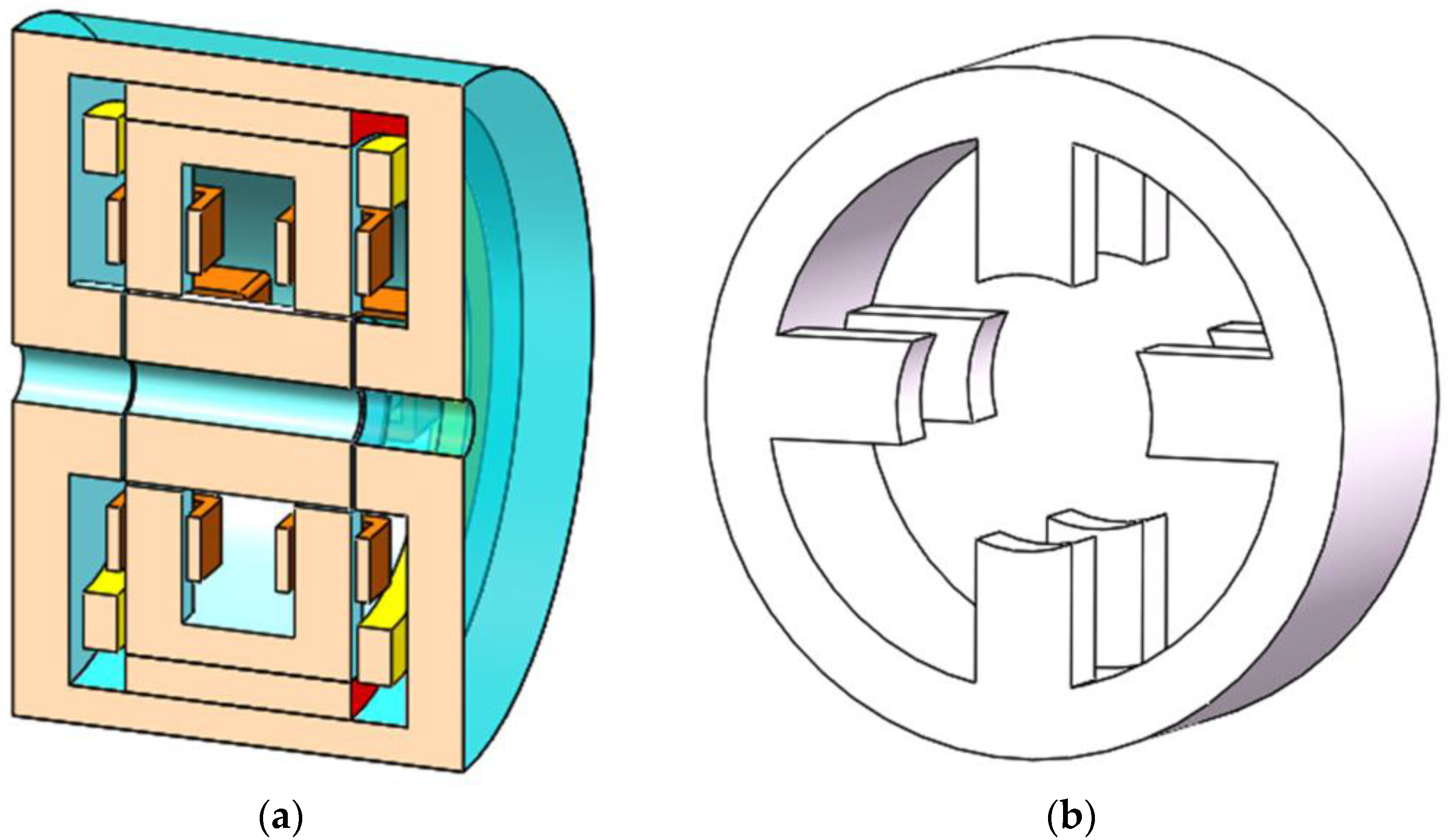
2.1. Structure of the 5-DOF HMB
2.2. Principle of Radial Suspension Force Generation
2.3. Principle of Axial Suspension Force Generation
2.4. Principle of Gravity Compensation
3. Accurate Magnetic Circuit Analysis
- (1)
- The reluctance of the stator iron core and of rotor core is not considered.
- (2)
- Finite coercivities and magnetic saturation are ignored.
- (3)
- The influence of the compensating current is ignored.
3.1. Accurate Analysis of Equivalent Magnetic Circuit of the PM Ring
3.2. Equivalent Magnet Circuit of the Suspension Control Windings
3.3. Expression of the Suspension Force
3.4. Maximum Suspension Force
4. Structure Parameter Design
4.1. Magnetic Flux Density in the Air Gap
4.2. Selection of the Magnetic Pole Areas
4.3. Electric Loading and Air Gap Length
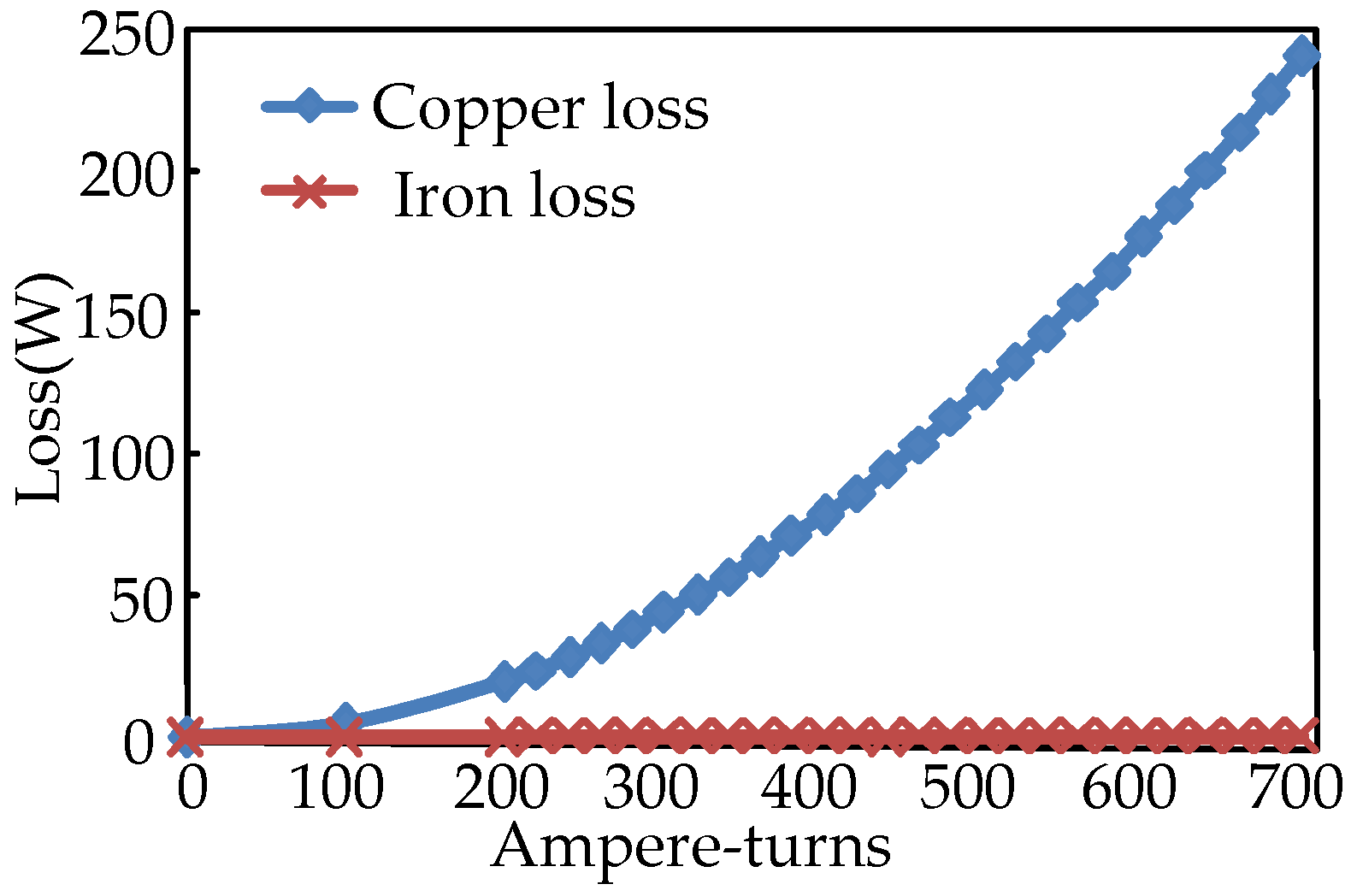
5. Losses in HBM
6. FEA, Unbalanced Force versus Displacement and Comparison
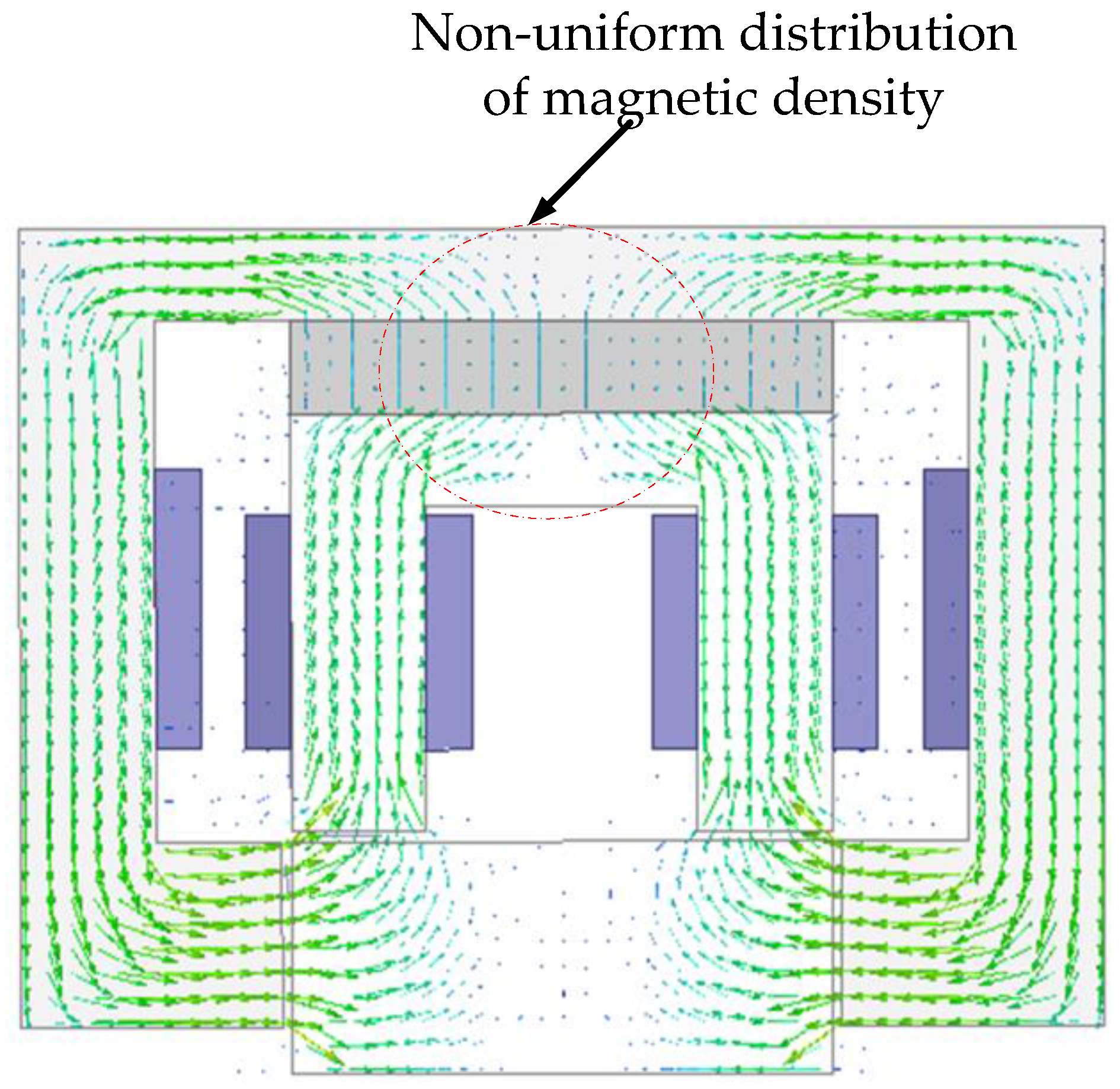
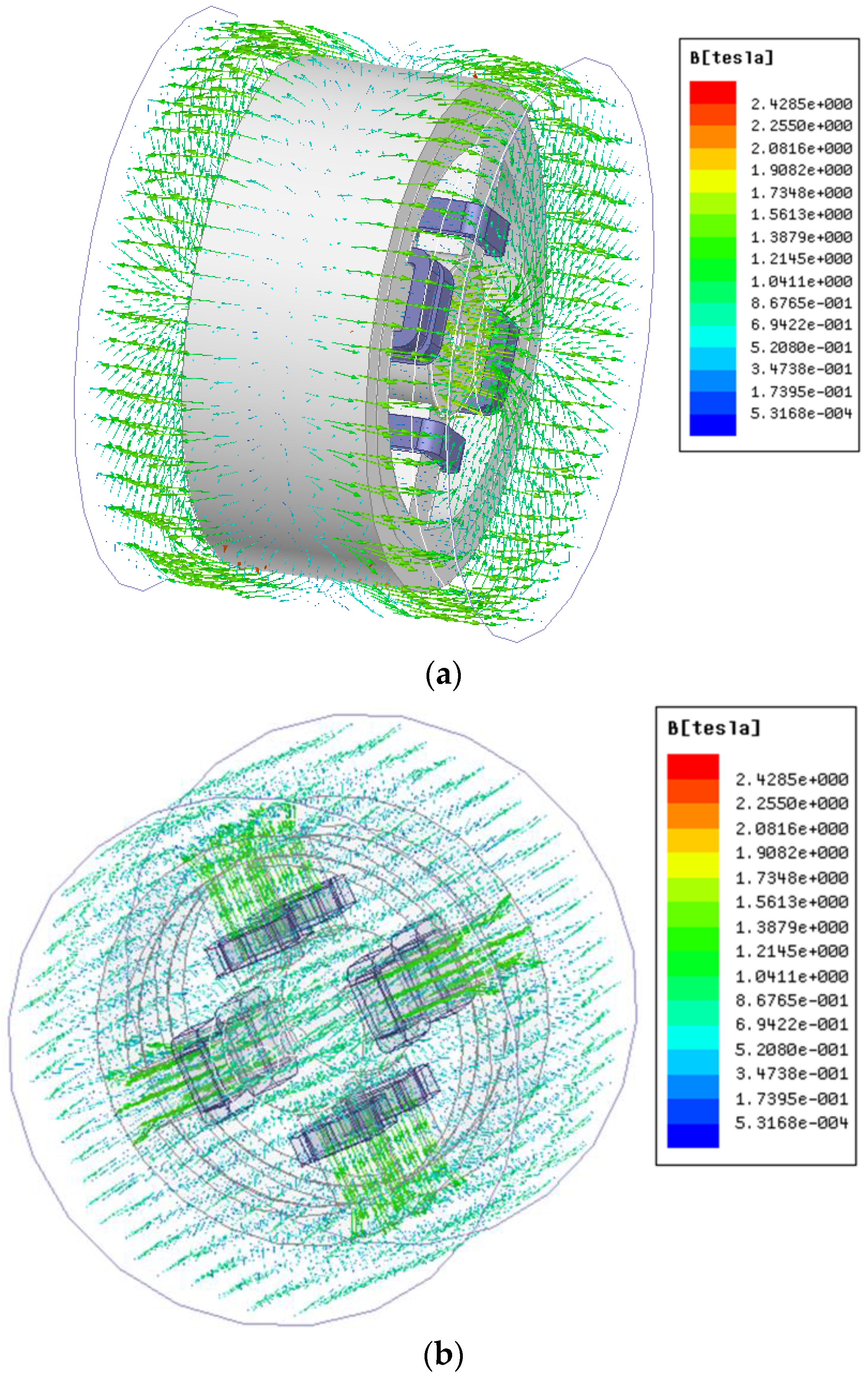
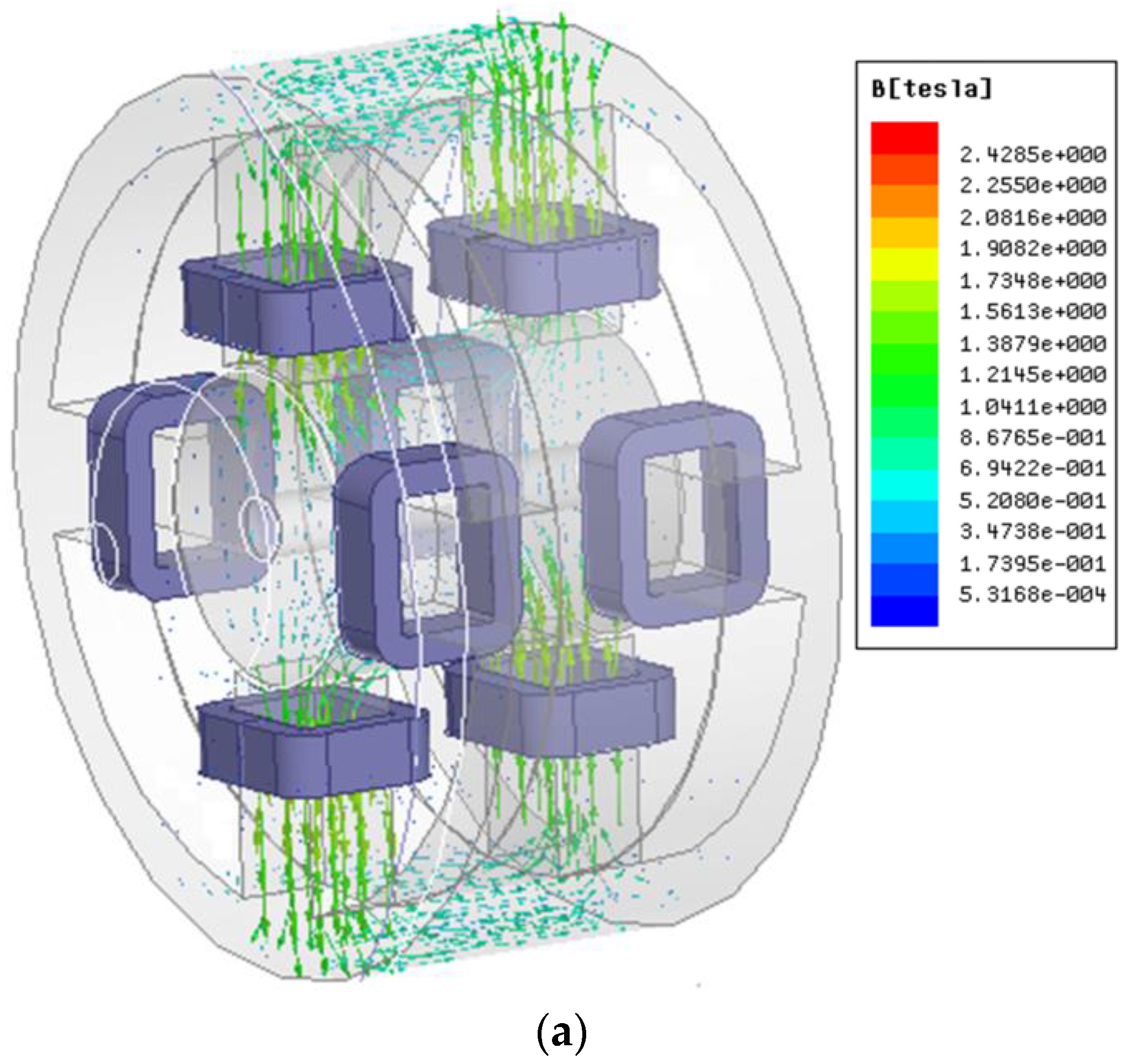
6.1. FEA
6.2. Unbalanced Force versus Displacement in Radial and Axial Directions
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ouyang, H.; Liu, F.; Zhang, G.M. Vibration suppression for rotor system of magnetic suspended wind turbines using cross-feedback-based sliding mode control. In Proceedings of the IEEE International Symposlum on System Integration, Nagoya, Japan, 11–13 December 2015; pp. 112–115.
- Muyeen, S.M. Wind Energy Conversion Systems Technology and Trends; China Machine Press: Beijing, China, 2013. [Google Scholar]
- Zhu, H.; Ding, S.; Jv, J. Modeling for three-pole radial hybrid magnetic bearing considering edge effect. Energies 2016, 9, 345. [Google Scholar] [CrossRef]
- Ding, W.; Liu, L.; Lou, J.Y. Design and control of a high-speed switched reluctance machine with conical magnetic bearings for aircraft application. IET Electr. Power Appl. 2012, 7, 179–190. [Google Scholar] [CrossRef]
- Chow, S.T.; Shyh, L.C. Design and control of a ring-type flywheel battery system with hybrid halbach magnetic bearings. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France, 8–11 July 2014; pp. 1558–1562.
- Ji, L.; Xu, L.X.; Jin, C.W. Research on a low power consumption six-pole heteropolar hybrid magnetic bearing. IEEE Trans. Magn. 2013, 49, 4918–4926. [Google Scholar] [CrossRef]
- Yonmook, P. Design and implementation of an electromagnetic levitation system for active magnetic bearing wheels. IET Control Theory Appl. 2014, 8, 139–148. [Google Scholar]
- Wu, D.; Liu, X.; Zhu, Z.Q.; Pride, A.; Deodhar, R.; Sasaki, T. Switched flux hybrid magnet memory machine. IET Electr. Power Appl. 2015, 9, 160–170. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, Y. A novel integrated structure with a radial displacement sensor and a permanent magnet biased radial magnetic bearing. Sensors 2014, 14, 1950–1960. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.L.; Sun, J.J. Decoupling structure for heteropolar permanent magnet biased radial magnetic bearing with subsidiary air-gap. IEEE Trans. Magn. 2014, 50, 8300208. [Google Scholar] [CrossRef]
- Liu, G.; Mao, K. A novel power failure compensation control method for active magnetic bearings used in high-speed permanent magnet motor. IEEE Trans. Power. 2016, 31, 4565–4575. [Google Scholar] [CrossRef]
- Jiang, K.J.; Zhu, C.S.; Chen, L.L. Unbalance compensation by recursive seeking unbalance mass position in active magnetic bearing-rotor system. IEEE Trans. Ind. Electron. 2015, 62, 5655–5664. [Google Scholar]
- Liu, Ch.; Liu, G. Equivalent damping control of radial twist motion for permanent magnetic bearings based on radial position variation. IEEE Trans. Ind. Electron. 2015, 62, 6417–6427. [Google Scholar] [CrossRef]
- Bachovchin, K.D.; Hoburg, J.F.; Post, R.F. Stable levitation of a passive magnetic bearing. IEEE Trans. Magn. 2013, 49, 609–617. [Google Scholar] [CrossRef]
- Imoberdorf, P.; Nussbaumer, T.; Johann, W. Analysis of a combined radial-axial magnetic bearing for a high-speed system. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD), Brighton, UK, 19–21 April 2010.
- Daoud, M.I.; Abdel-Khalik, A.S.; Massoud, A.; Ahmed, S.; Abbasy, N.H. A design example of an 8-pole radial AMB for flywheel energy storage. In Proceedings of the 2012 20th International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 1153–1159.
- Zhang, W.Y.; Zhu, H.Q. Precision modeling method specifically for AC magnetic bearings. IEEE Trans. Magn. 2013, 49, 5543–5553. [Google Scholar] [CrossRef]
- Kim, S.H.; Shin, J.W.; Ishiyama, K. Magnetic bearings and synchronous magnetic axial coupling for the enhancement of the driving performance of magnetic wireless pumps. IEEE Trans. Magn. 2014, 50, 8300208. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Zhu, H.Q. Control system design for a five-degree-of-freedom electrospindle supported with AC hybrid magnetic bearings. IEEE/ASME Trans. 2015, 20, 2525–2537. [Google Scholar] [CrossRef]
- Lin, F.J.; Chen, S.Y.; Huang, M.S. Intelligent double integral sliding-mode control for five-degree-of-freedom active magnetic bearing system. IET Control Theory Appl. 2011, 5, 1287–1303. [Google Scholar] [CrossRef]
- Liu, S.; Song, L.; Li, S.; Wang, J.; Lei, X. Decoupling active and passive hybrid axial and radial magnetic bearing. In Proceedings of the 4th International Conference on Control, Automation and Information Sciences (ICCAIS), Changshu, China, 29–31 October 2015; pp. 402–407.
- Dash, S.K.; Swarup, K.S.; Rajan, K.K. Design optimization of large gap single axis thrust magnetic bearing actuator. Int. J. Appl. Electromagn. Mech. 2015, 47, 661–675. [Google Scholar]
- Wang, G.; Xu, L.X. Structure and magnetic circuit analysis of permanent magnet biased magnetic bearing with five degrees of freedom. Dev. Innov. Mach. Electr. Prod. 2003, 6, 16–18. [Google Scholar]
- Masuzawa, T.; Kojima, J.; Onuma, H. Micro magnetic bearing for an axial flow artificial heart. In Proceedings of the 9th International Symposium on Magnetic Bearings, Lexington, KY, USA, 3–6 August 2004; pp. 89–94.
- Wang, X.; Fang, J.C.; Fan, Y.H.; Sun, J.J. Axial force tilting permanent-magnet-biased magnetic bearing with five degrees of freedom and magnetic field decoupling design. Proc. CSEE 2011, 31, 91–98. [Google Scholar]
- Schweitzer, G.; Maslen, E.H. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; China Machine Press: Beijing, China, 2012. [Google Scholar]
- Nerg, J.; Rilla, M.; Pyrhonen, J. Thermal analysis of radial-flux electrical machines with a high power density. IEEE Trans. Ind. Electron. 2008, 55, 3543–3554. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Axial air gap length, g1, mm | 1 |
| Radial air gap length, g0, mm | 1 |
| Height of PM, hm, mm | 10 |
| Maximum number of ampere turns, Nrirs, Naiax | 700 |
| Axial length of outer stator, mm | 240 |
| Outer diameter of outer stator, mm | 342 |
| Axial length of rotor, mm | 120 |
| Outer diameter of rotor, mm | 100 |
| Axial length of PM ring, mm | 120 |
| Height of the inner stator tooth, mm | 70 |
| Width of the inner stator tooth, mm | 30 |
| Yokes of inner and outer stator, mm | 20 |
| Relative permeability of PM, μr | 1.1 |
| Remanence for PM, Br, T | 1.25 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Zhang, W.; Sun, Y.; Xu, P. Basic Characteristics and Design of a Novel Hybrid Magnetic Bearing for Wind Turbines. Energies 2016, 9, 905. https://doi.org/10.3390/en9110905
Yu Y, Zhang W, Sun Y, Xu P. Basic Characteristics and Design of a Novel Hybrid Magnetic Bearing for Wind Turbines. Energies. 2016; 9(11):905. https://doi.org/10.3390/en9110905
Chicago/Turabian StyleYu, Yanjun, Weiyu Zhang, Yuxin Sun, and Peifeng Xu. 2016. "Basic Characteristics and Design of a Novel Hybrid Magnetic Bearing for Wind Turbines" Energies 9, no. 11: 905. https://doi.org/10.3390/en9110905
APA StyleYu, Y., Zhang, W., Sun, Y., & Xu, P. (2016). Basic Characteristics and Design of a Novel Hybrid Magnetic Bearing for Wind Turbines. Energies, 9(11), 905. https://doi.org/10.3390/en9110905