
Sensorless Control of Interior Permanent Magnet Synchronous Motor in Low-Speed Region Using Novel Adaptive Filter

Abstract
:1. Introduction
2. IPMSM Model and PLL-Type Estimator
2.1. IPMSM Model
2.2. PLL-Type Estimation Algorithm
3. Sensorless Control Scheme
3.1. High Frequency Model Analysis
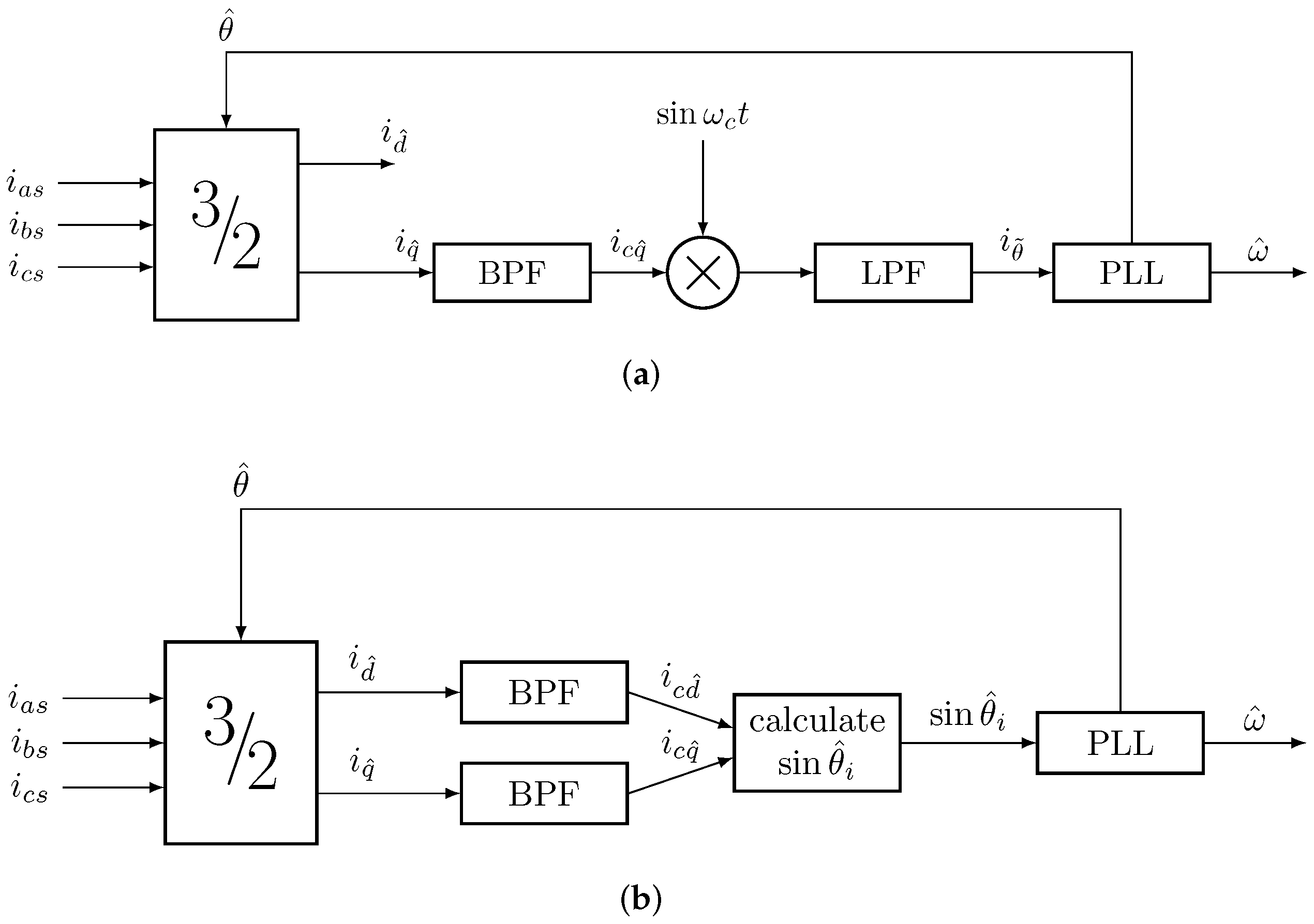
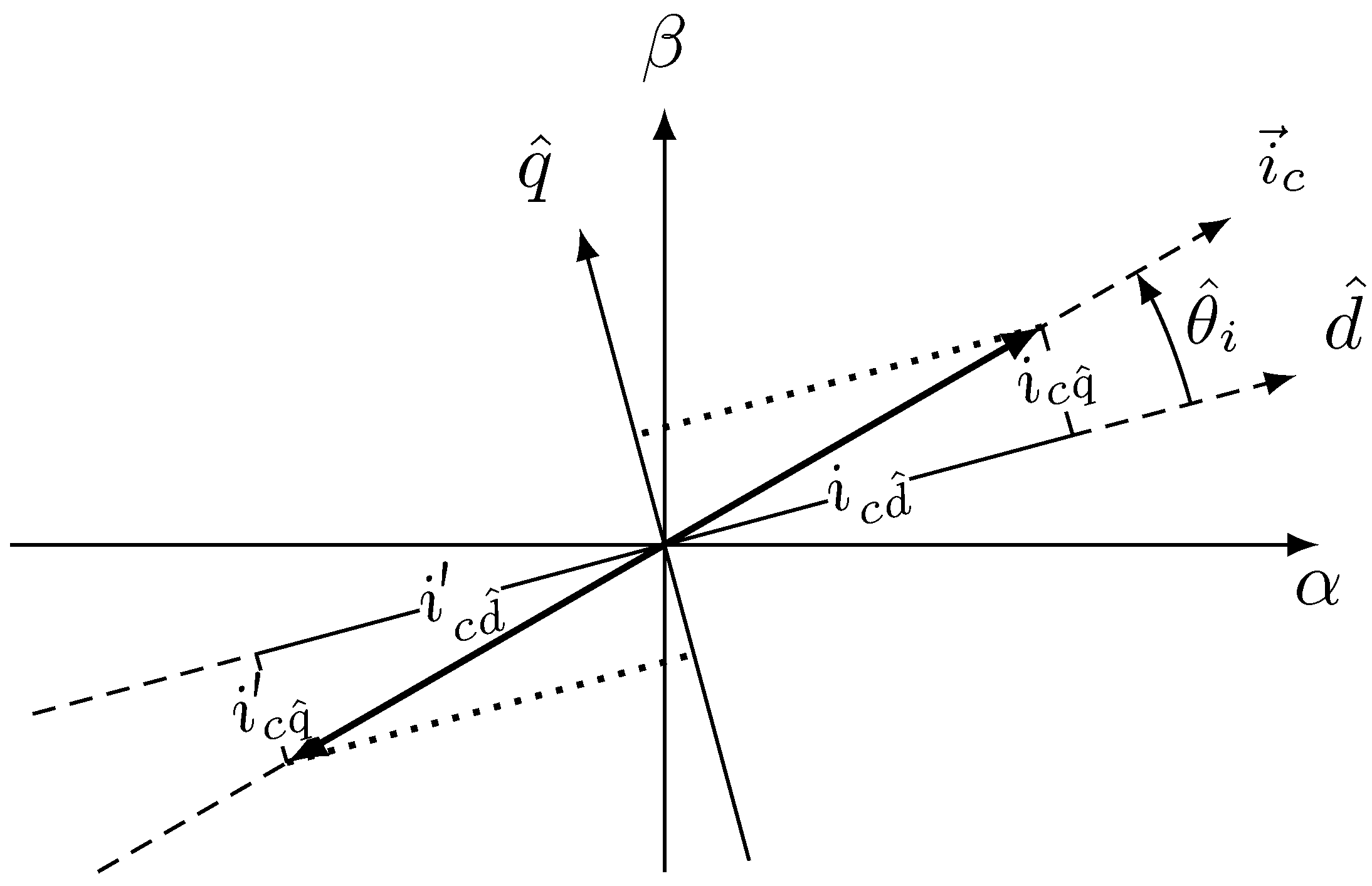
3.2. Estimator Analysis
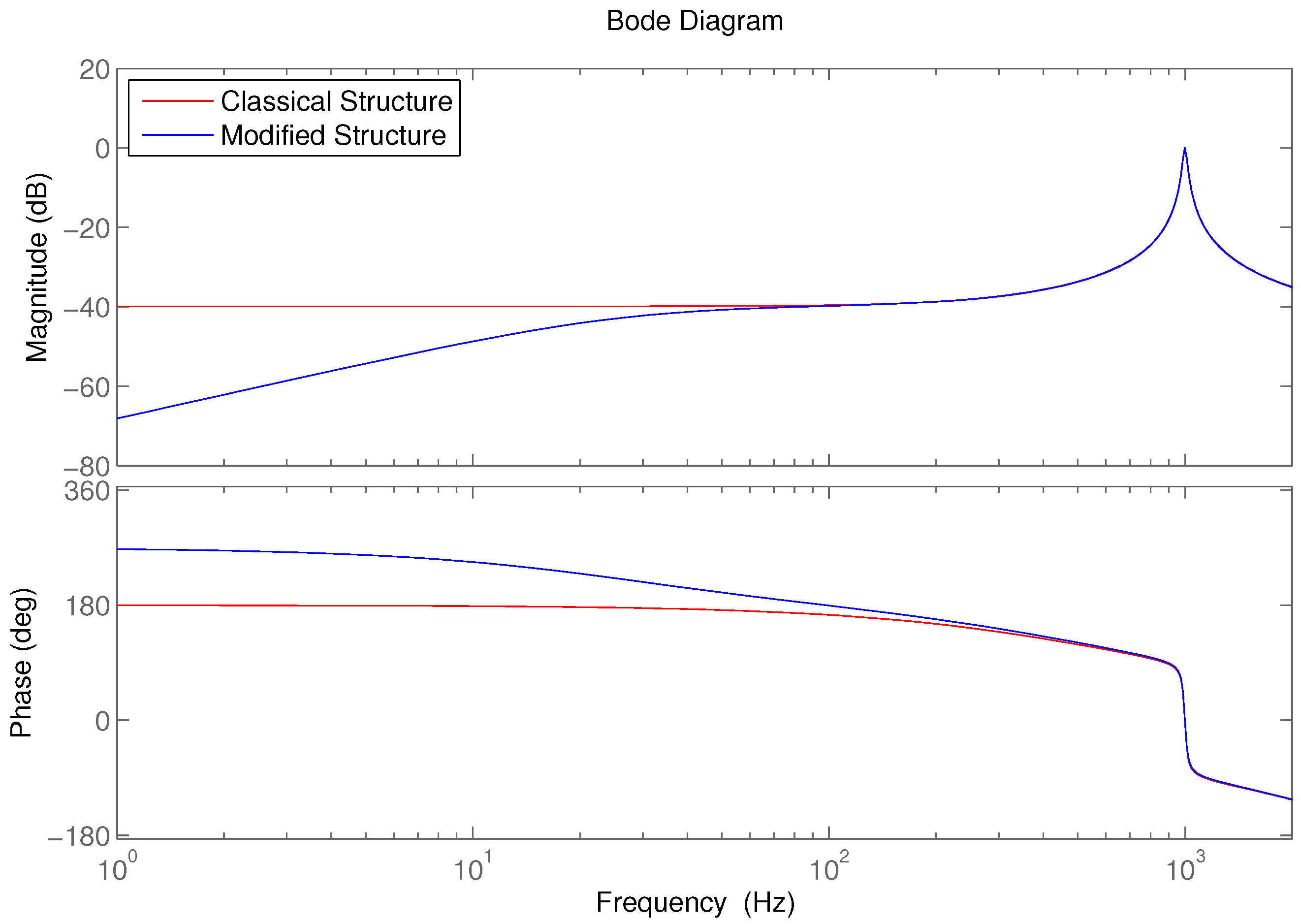
4. Adaptive Filter
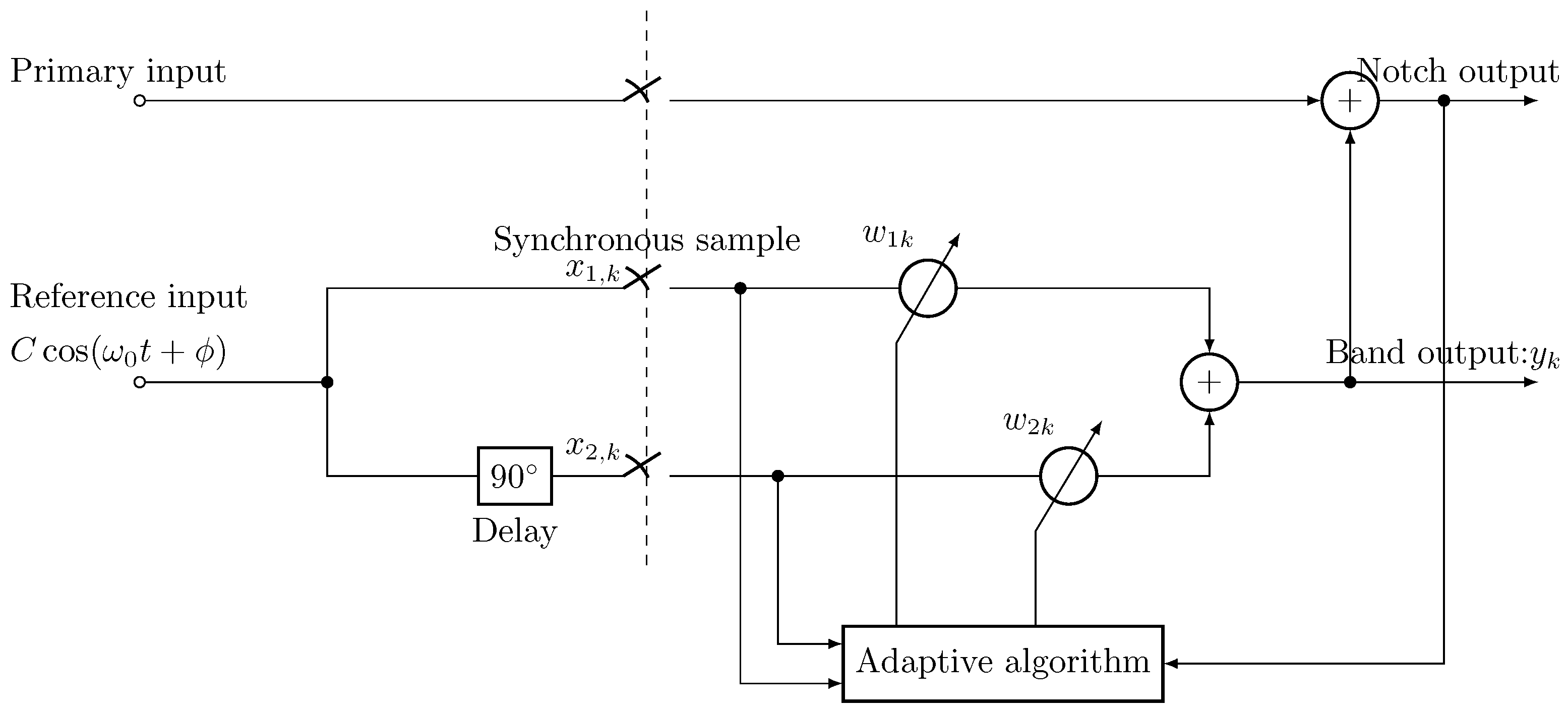
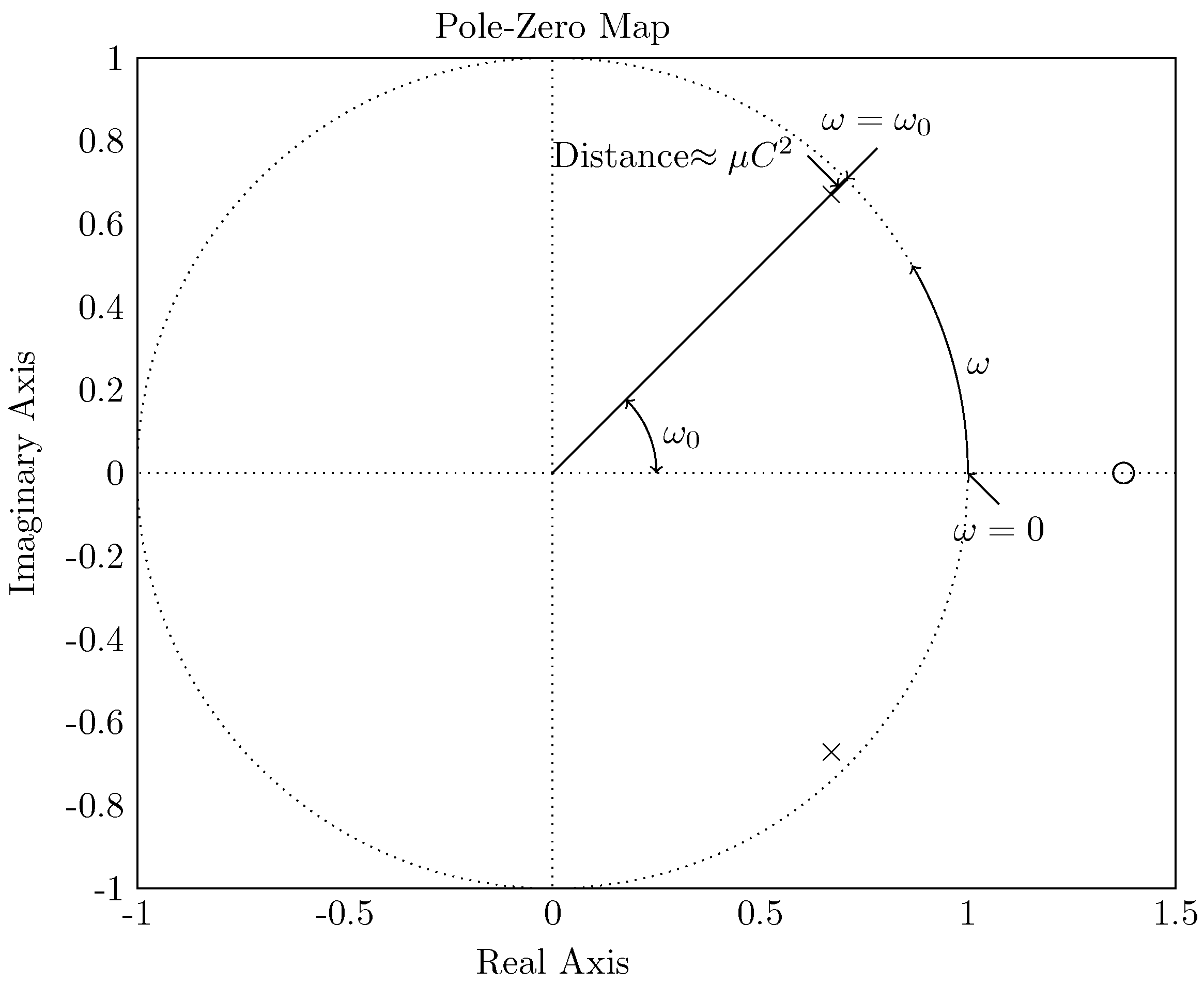
4.1. Structure of the Adaptive Filter
4.2. Structure of the Modified Adaptive Filter
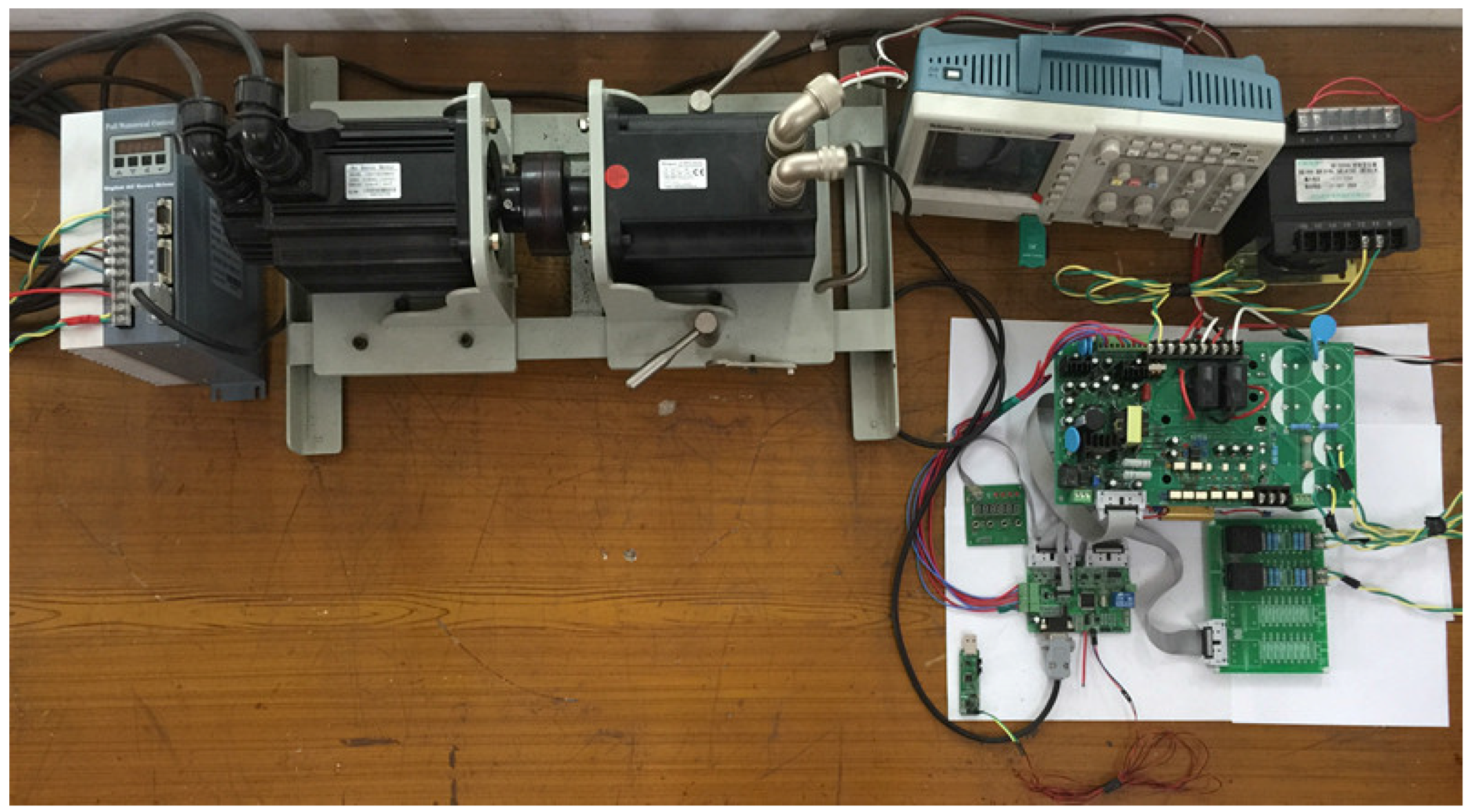
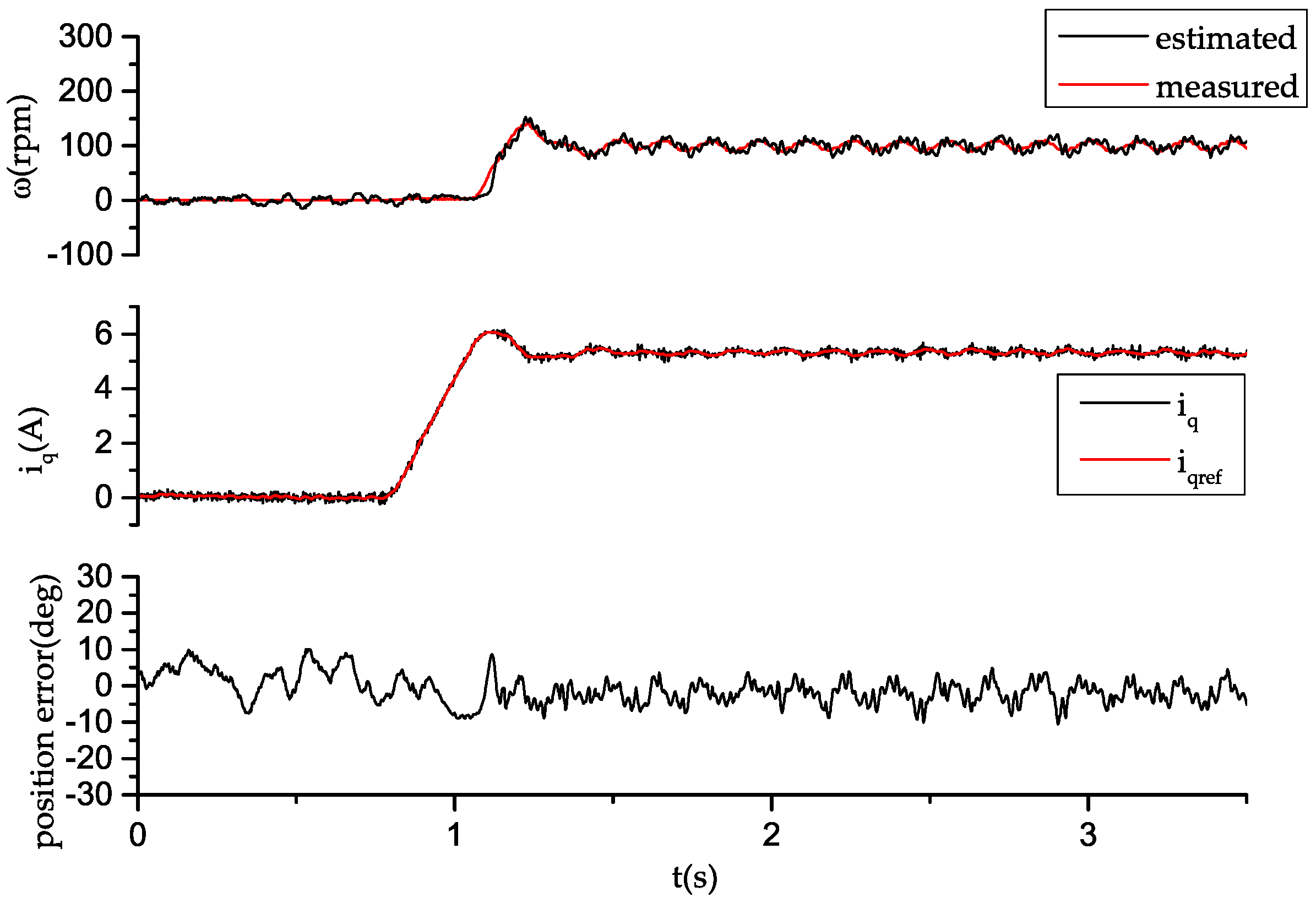
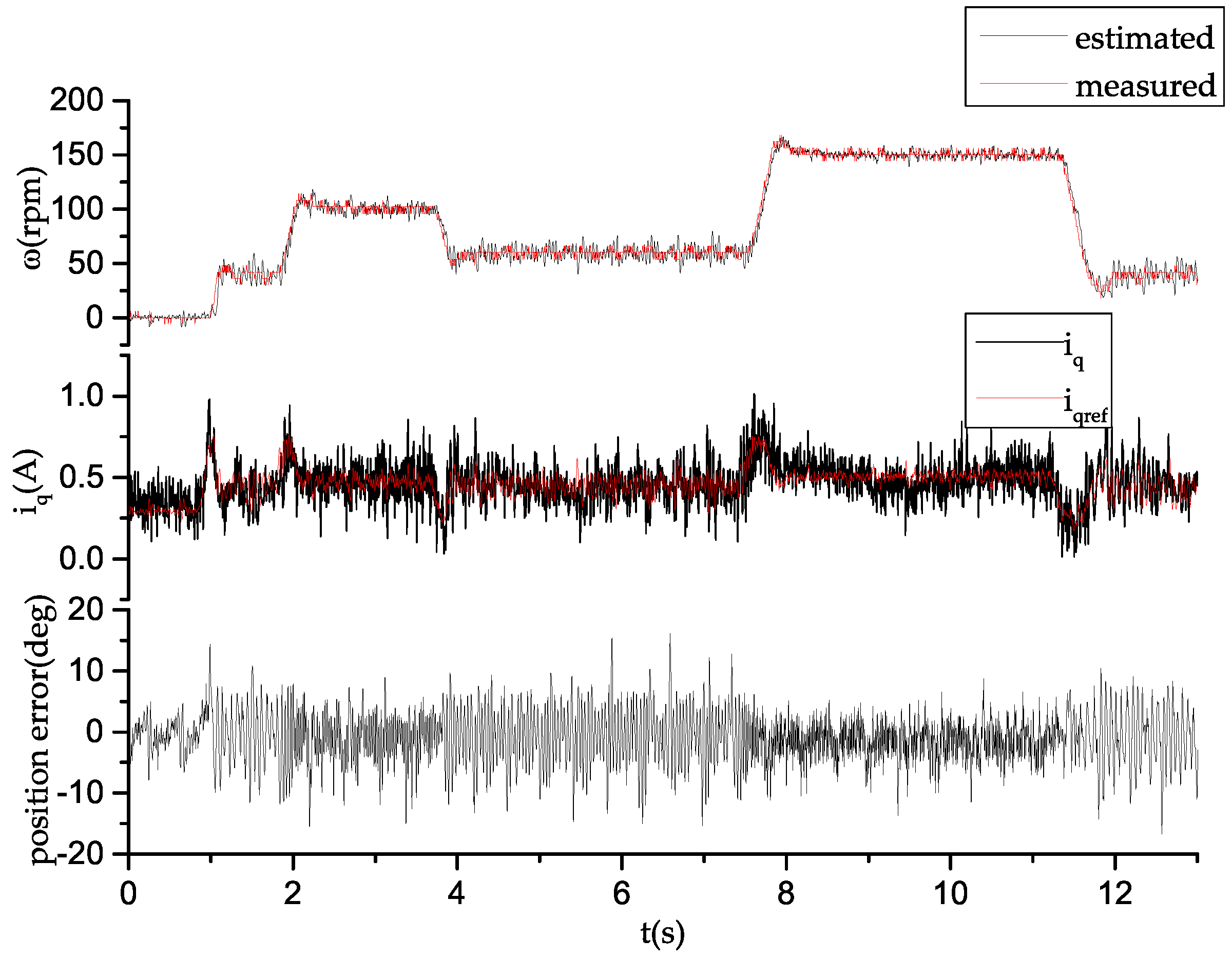
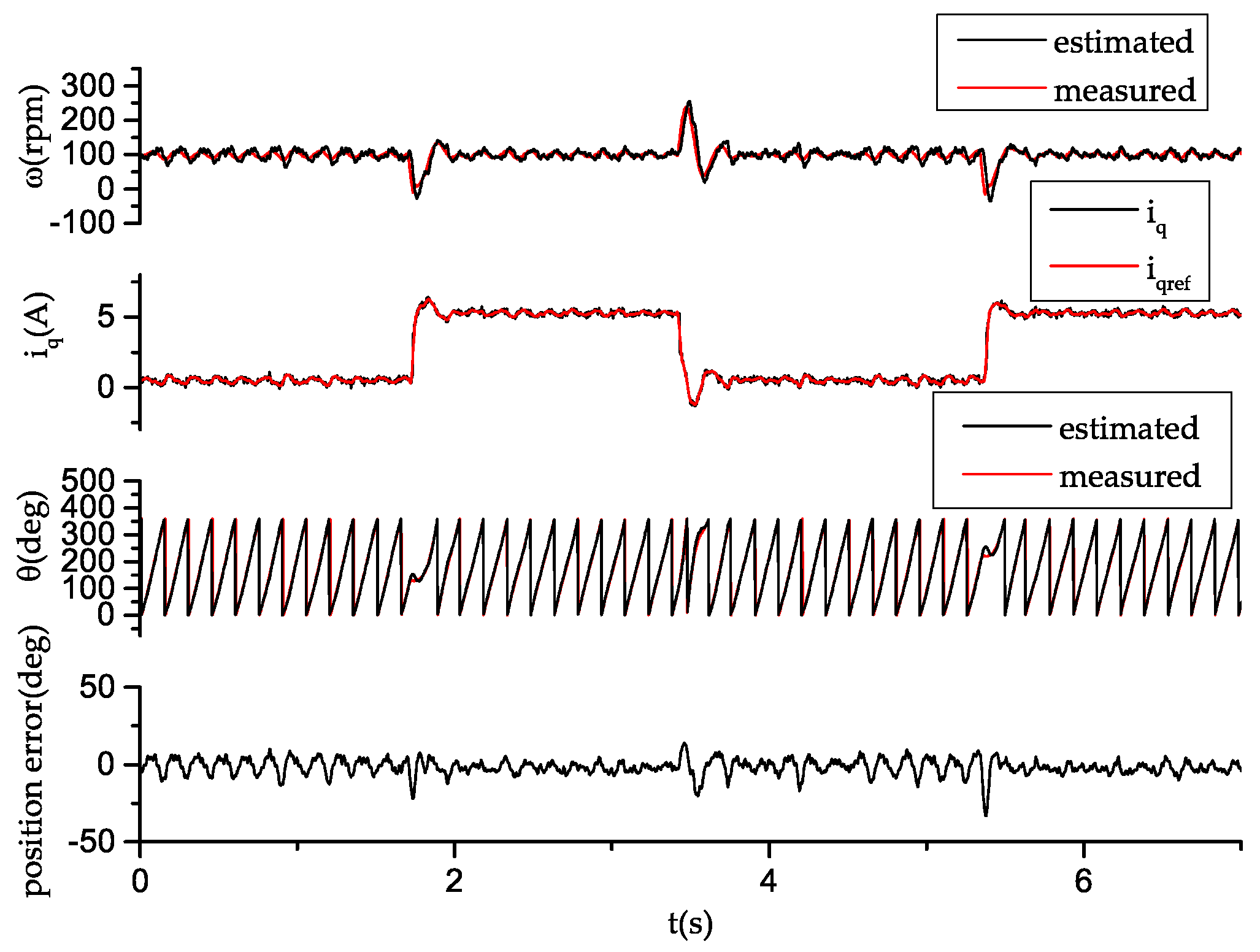
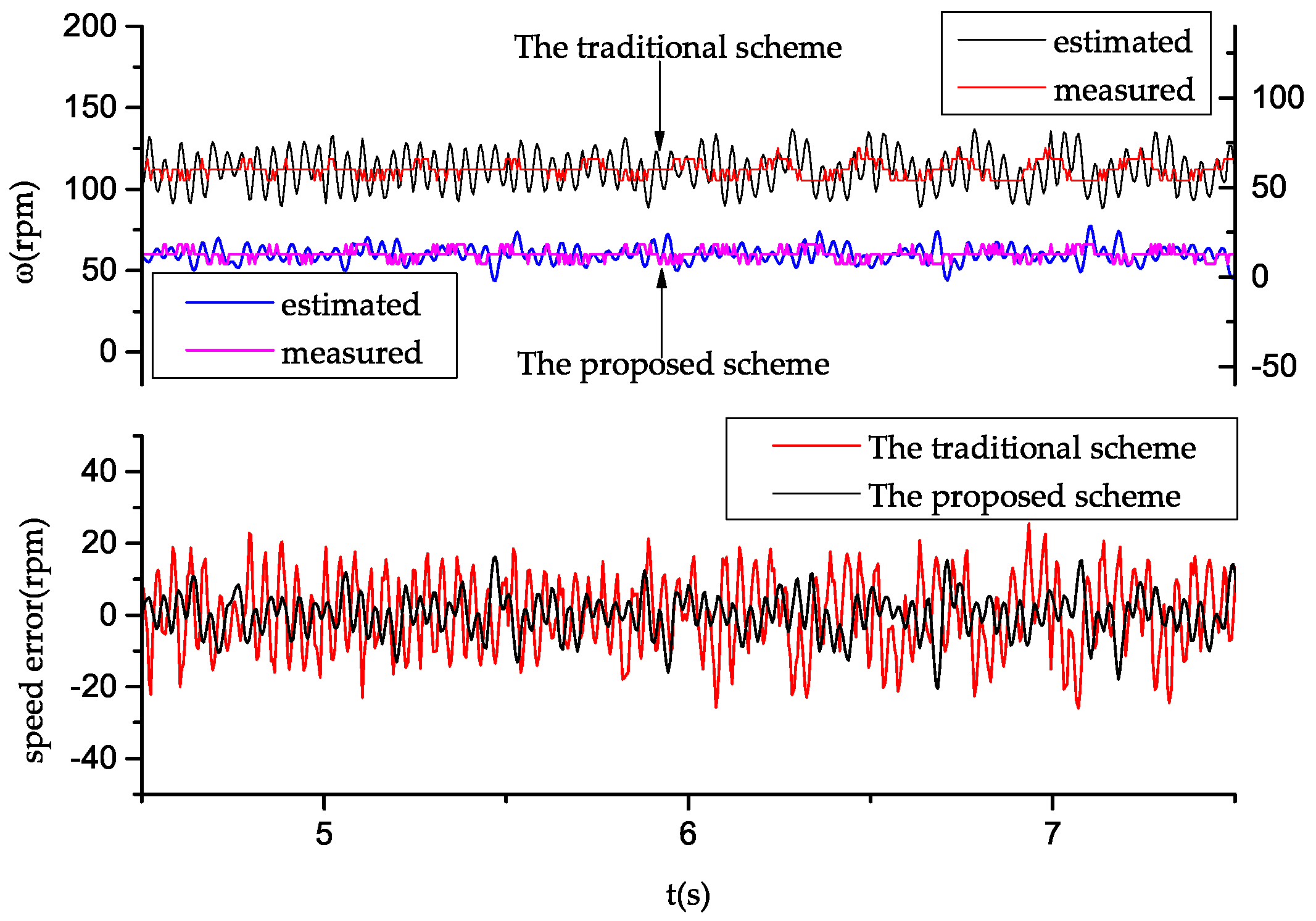
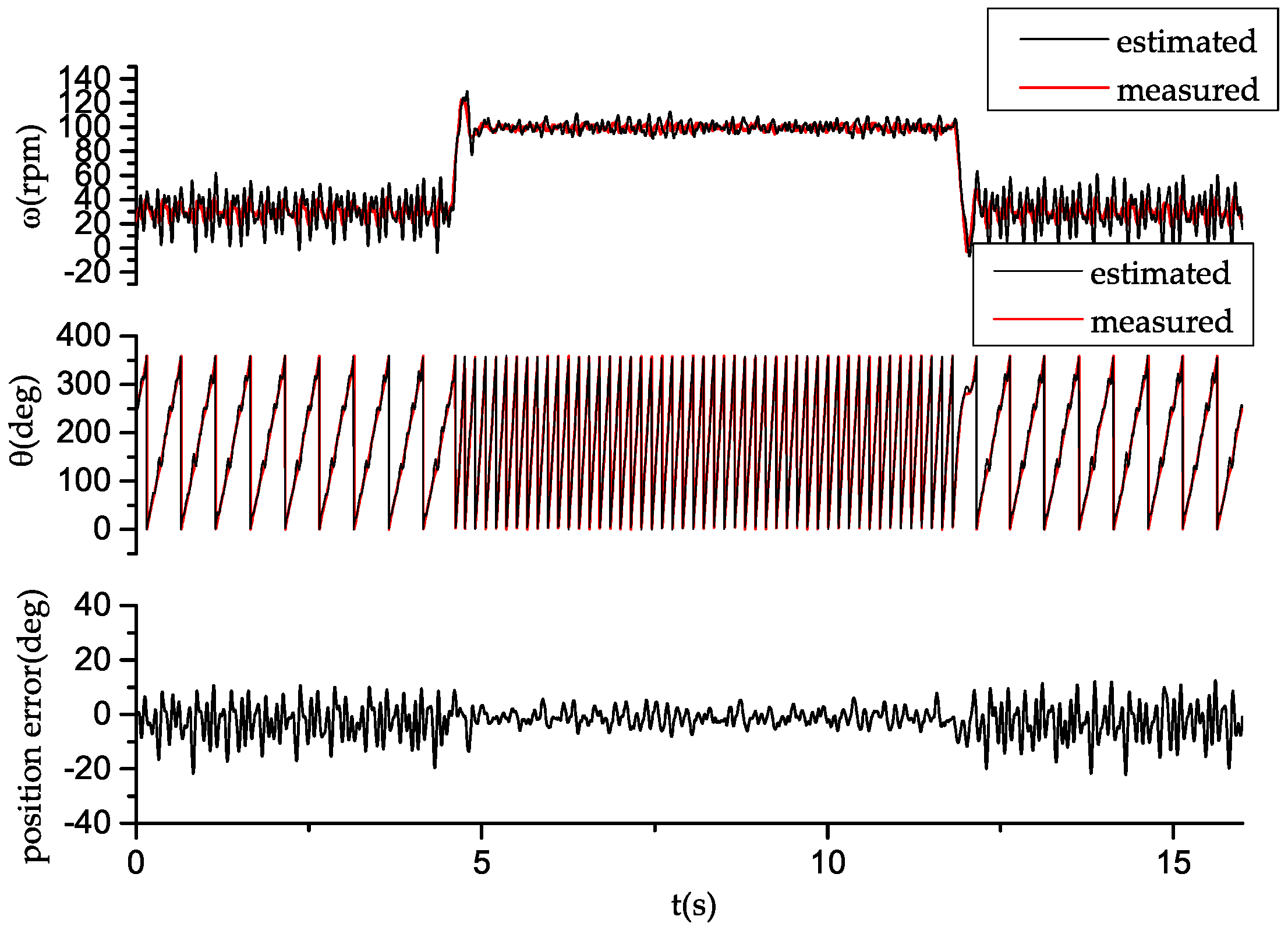
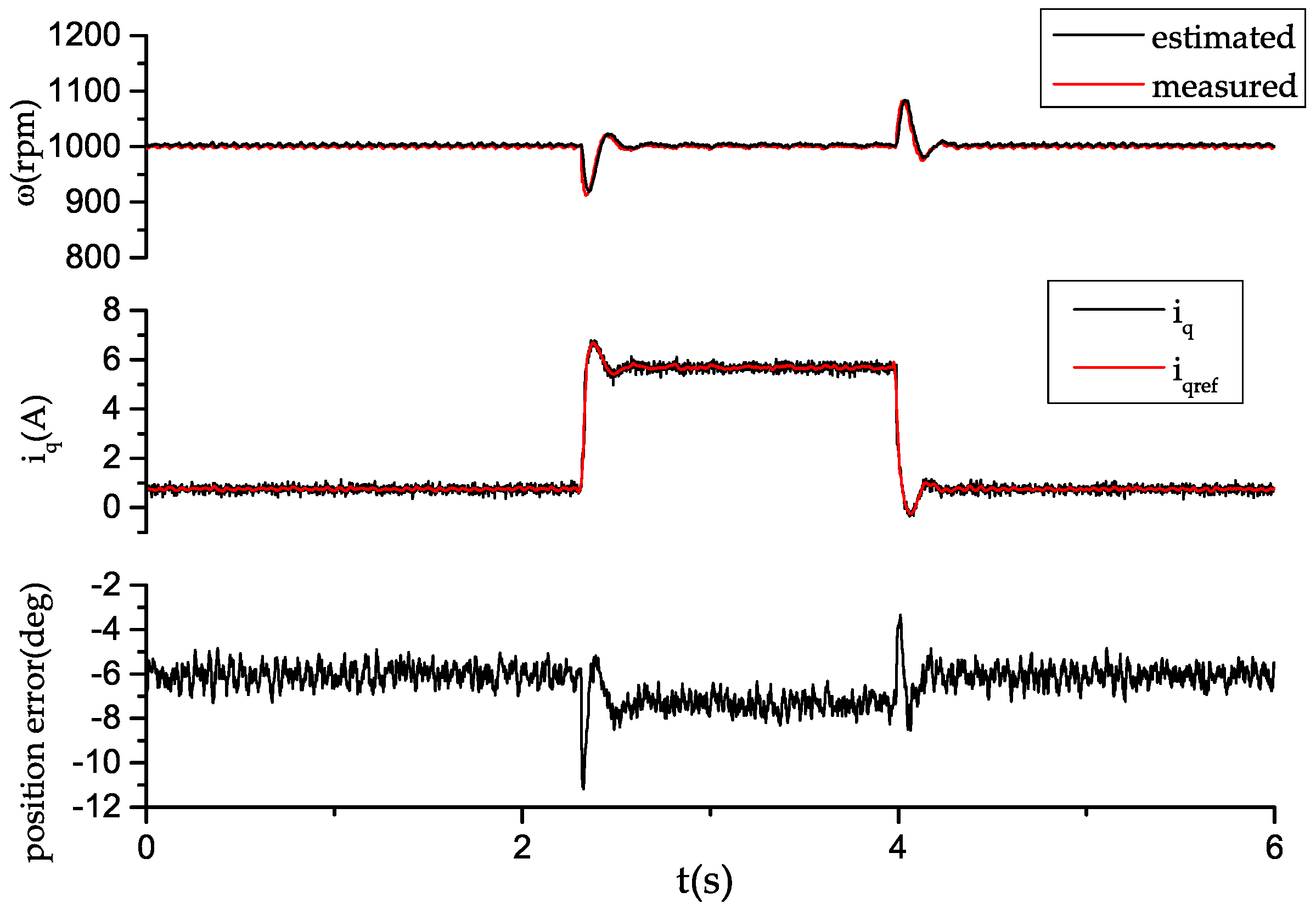
5. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Holtz, J. Sensorless control of induction motor drives. Proc. IEEE 2002, 90, 1359–1394. [Google Scholar] [CrossRef]
- Wu, R.; Slemon, G.R. A permanent magnet motor drive without a shaft sensor. IEEE Trans. Ind. Appl. 1991, 27, 1005–1011. [Google Scholar] [CrossRef]
- Sepe, R.B.; Lang, J.H. Real-Time Observer-Based (Adaptive) Control of a Permanent-Magnet Synchronous Motor without Mechanical Sensors. IEEE Trans. Ind. Appl. 1992, 28, 1345–1352. [Google Scholar] [CrossRef]
- Jansen, P.L.; Lorenz, R.D. Transducerless Position and Velocity Estimation in Induction and Salient AC Machines. IEEE Trans. Ind. Appl. 1995, 31, 240–247. [Google Scholar] [CrossRef]
- Shinnaka, S. New “D-state-observer”-based vector control for sensorless drive of permanent-magnet synchronous motors. IEEE Trans. Ind. Appl. 2005, 41, 825–833. [Google Scholar] [CrossRef]
- Piippo, A.; Hinkkanen, M.; Luomi, J. Analysis of an adaptive observer for sensorless control of interior permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2008, 55, 570–576. [Google Scholar] [CrossRef]
- Alahakoon, S.; Fernando, T.; Trinh, H.; Sreeram, V. Unknown input sliding mode functional observers with application to sensorless control of permanent magnet synchronous machines. J. Frankl. Inst. 2013, 350, 107–128. [Google Scholar] [CrossRef]
- Kim, H.; Son, J.; Lee, J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM. IEEE Trans. Ind. Electron. 2011, 58, 4069–4077. [Google Scholar]
- Bolognani, S.; Tubiana, L.; Zigliotto, M. Extended Kalman filter tuning in sensorless PMSM drives. IEEE Trans. Ind. Appl. 2003, 39, 1741–1747. [Google Scholar] [CrossRef]
- Quang, N.K.; Hieu, N.T.; Ha, Q.P. FPGA-based sensorless PMSM speed control using reduced-order extended kalman filters. IEEE Trans. Ind. Electron. 2014, 61, 6574–6582. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Tuovinen, T.; Harnefors, L.; Luomi, J. A combined position and stator-resistance observer for salient PMSM drives: Design and stability analysis. IEEE Trans. Power Electron. 2012, 27, 601–609. [Google Scholar] [CrossRef]
- Holtz, J. Acquisition of position error and magnet polarity for sensorless control of PM synchronous machines. IEEE Trans. Ind. Appl. 2008, 44, 1172–1180. [Google Scholar] [CrossRef]
- DeKock, H.W.; Kamper, M.J.; Kennel, R.M. Anisotropy Comparison of Reluctance and PM Synchronous Machines for Position Sensorless Control Using HF Carrier Injection. IEEE Trans. Power Electron. 2009, 24, 1905–1913. [Google Scholar] [CrossRef]
- Jang, J.H.; Sul, S.K.; Ha, J.I.; Ide, K.; Sawamura, M. Sensorless Drive of Surface-Mounted Permanent-Magnet Motor by High-Frequency Signal Injection Based on Magnetic Saliency. IEEE Trans. Ind. Appl. 2003, 39, 1031–1039. [Google Scholar] [CrossRef]
- Corley, M.; Lorenz, R. Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds. IEEE Trans. Ind. Appl. 1998, 34, 784–789. [Google Scholar] [CrossRef]
- Briz, F.; Degner, M.W.; Garcia, P.; Lorenz, R.D. Comparison of saliency-based sensorless control techniques for AC machines. IEEE Trans. Ind. Appl. 2004, 40, 1107–1115. [Google Scholar] [CrossRef]
- Liu, J.M.; Zhu, Z.Q. Sensorless Control Strategy by Square-Waveform High-Frequency Pulsating Signal Injection Into Stationary Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 171–180. [Google Scholar] [CrossRef]
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives; CRC Press: New York, NY, USA, 2010; pp. 423–451. [Google Scholar]
- Widrow, B.; Stearns, S. Adaptive Signal Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1985; pp. 302–361. [Google Scholar]
- Accetta, A.; Cirrincione, M.; Pucci, M.; Vitale, G. Sensorless control of PMSM fractional horsepower drives by signal injection and neural adaptive-band filtering. IEEE Trans. Ind. Electron. 2012, 59, 1355–1366. [Google Scholar] [CrossRef]
- Wang, G.; Li, T.; Zhang, G.; Gui, X.; Xu, D. Position estimation error reduction using recursive-least-square adaptive filter for model-based sensorless interior permanent-magnet synchronous motor drives. IEEE Trans. Ind. Electron. 2014, 61, 5115–5125. [Google Scholar] [CrossRef]
- Stensby, J. Phase-Locked Loops: Theory and Applications; CRC Press: New York, NY, USA, 1997; pp. 211–252. [Google Scholar]
- Harnefors, L.; Nee, H.P. A general algorithm for speed and position estimation of AC motors. IEEE Trans. Ind. Electron. 2000, 47, 77–83. [Google Scholar] [CrossRef]
- Wallmark, O.; Harnefors, L.; Carlson, O. An improved speed and position estimator for salient permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2005, 52, 255–262. [Google Scholar] [CrossRef]
- Piippo, A.; Salomaki, J.; Luomi, J. Signal injection in sensorless PMSM drives equipped with inverter output filter. IEEE Trans. Ind. Appl. 2008, 44, 1614–1620. [Google Scholar] [CrossRef]
- Wang, G.; Yang, R.; Xu, D. DSP-based control of sensorless IPMSM drives for wide-speed-range operation. IEEE Trans. Ind. Electron. 2013, 60, 720–727. [Google Scholar] [CrossRef]
- Holtz, J. Initial rotor polarity detection and sensorless control of PM synchronous machines. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference, 41st IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rating and Parameters | Value | Unit |
|---|---|---|
| Rated speed | 1500 | rpm |
| Rated torque | 7.5 | Nm |
| Number of pole pairs | 4 | P |
| Stator resistance | 0.49 | Ω |
| d-axis inductance | 5.81 | mH |
| q-axis inductance | 8.65 | mH |
| rotor flux | 0.14 | Wb |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, L.; Zhao, J.; Sun, J. Sensorless Control of Interior Permanent Magnet Synchronous Motor in Low-Speed Region Using Novel Adaptive Filter. Energies 2016, 9, 1084. https://doi.org/10.3390/en9121084
Tian L, Zhao J, Sun J. Sensorless Control of Interior Permanent Magnet Synchronous Motor in Low-Speed Region Using Novel Adaptive Filter. Energies. 2016; 9(12):1084. https://doi.org/10.3390/en9121084
Chicago/Turabian StyleTian, Lisi, Jin Zhao, and Jiajiang Sun. 2016. "Sensorless Control of Interior Permanent Magnet Synchronous Motor in Low-Speed Region Using Novel Adaptive Filter" Energies 9, no. 12: 1084. https://doi.org/10.3390/en9121084
APA StyleTian, L., Zhao, J., & Sun, J. (2016). Sensorless Control of Interior Permanent Magnet Synchronous Motor in Low-Speed Region Using Novel Adaptive Filter. Energies, 9(12), 1084. https://doi.org/10.3390/en9121084