
Advanced Pareto Front Non-Dominated Sorting Multi-Objective Particle Swarm Optimization for Optimal Placement and Sizing of Distributed Generation


Abstract
:1. Introduction
2. Distributed Generation (DG) Modeling
3. Problem Formulation
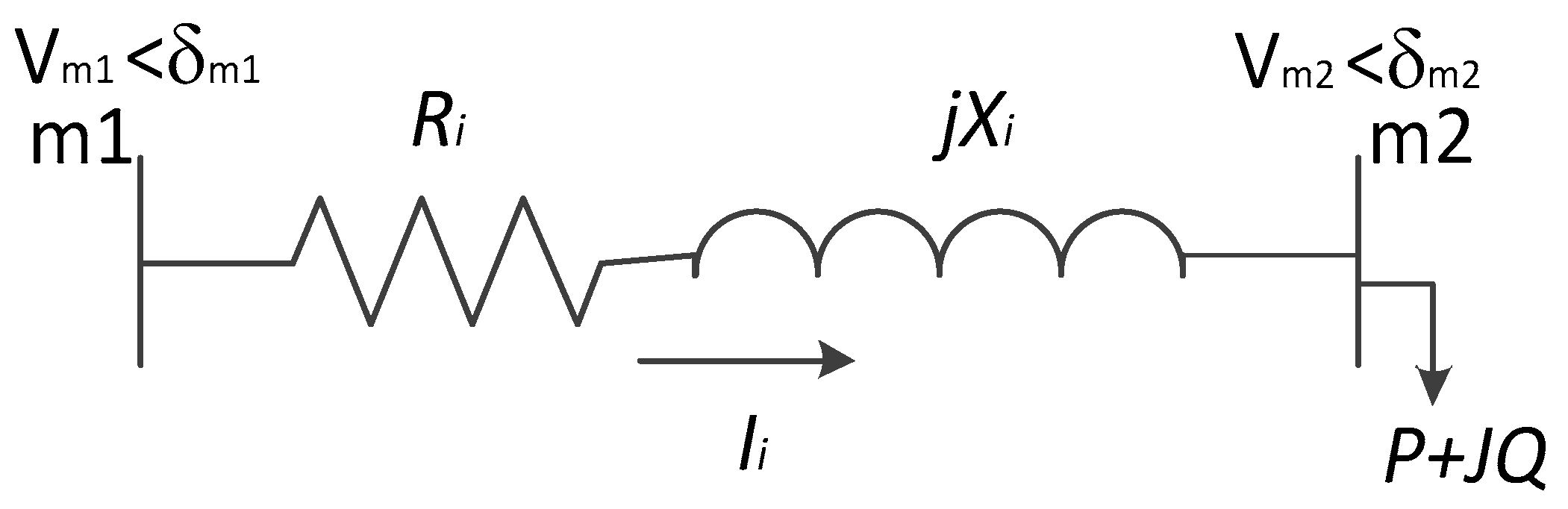
3.1. Load Flow Technique
3.2. Objective Functions
3.2.1. Power Loss Reduction
3.2.2. Voltage Stability Index
3.3. Network Constraints
3.3.1. Power Balance
3.3.2. Position of DG
3.3.3. Voltage Profile
4. Multi-Objective Optimization (MOO), Dominate, Non-Dominated and Pareto Optimal Solution
- i
- MOO: It can be expressed as follows:where is the function of and is the total number of objective functions. The and are the decision variable and its space respectively. and are the constraint functions of the problem respectively.
- ii
- Dominated: Let us say a decision vector is said to dominate , if and only if, the following conditions are satisfied.
- ▪
- The solution in decision vector is no worse than decision vector in all objectives.
- ▪
- The solution in decision vector is strictly better than in all objectives.
- iii
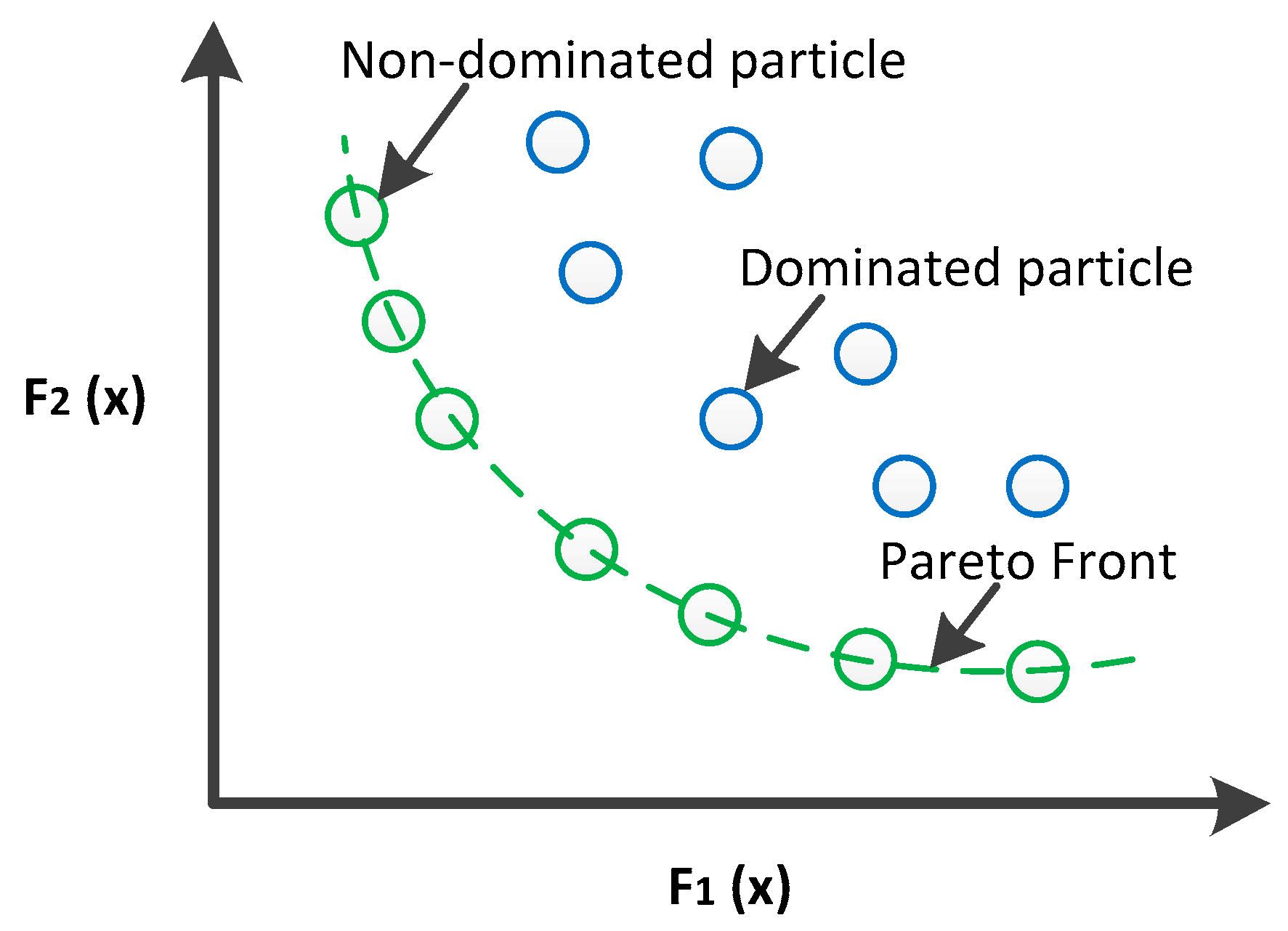
- Non-dominated:A solution is said to be non-dominated or Pareto solution of set , if , and there is no solution for which dominates .
- iv
- Pareto-optimal solution:Supposed that all the non-dominated solutions of set are in set , then Pareto front of set is is given as in Equation (19) and can be seen in Figure 2.
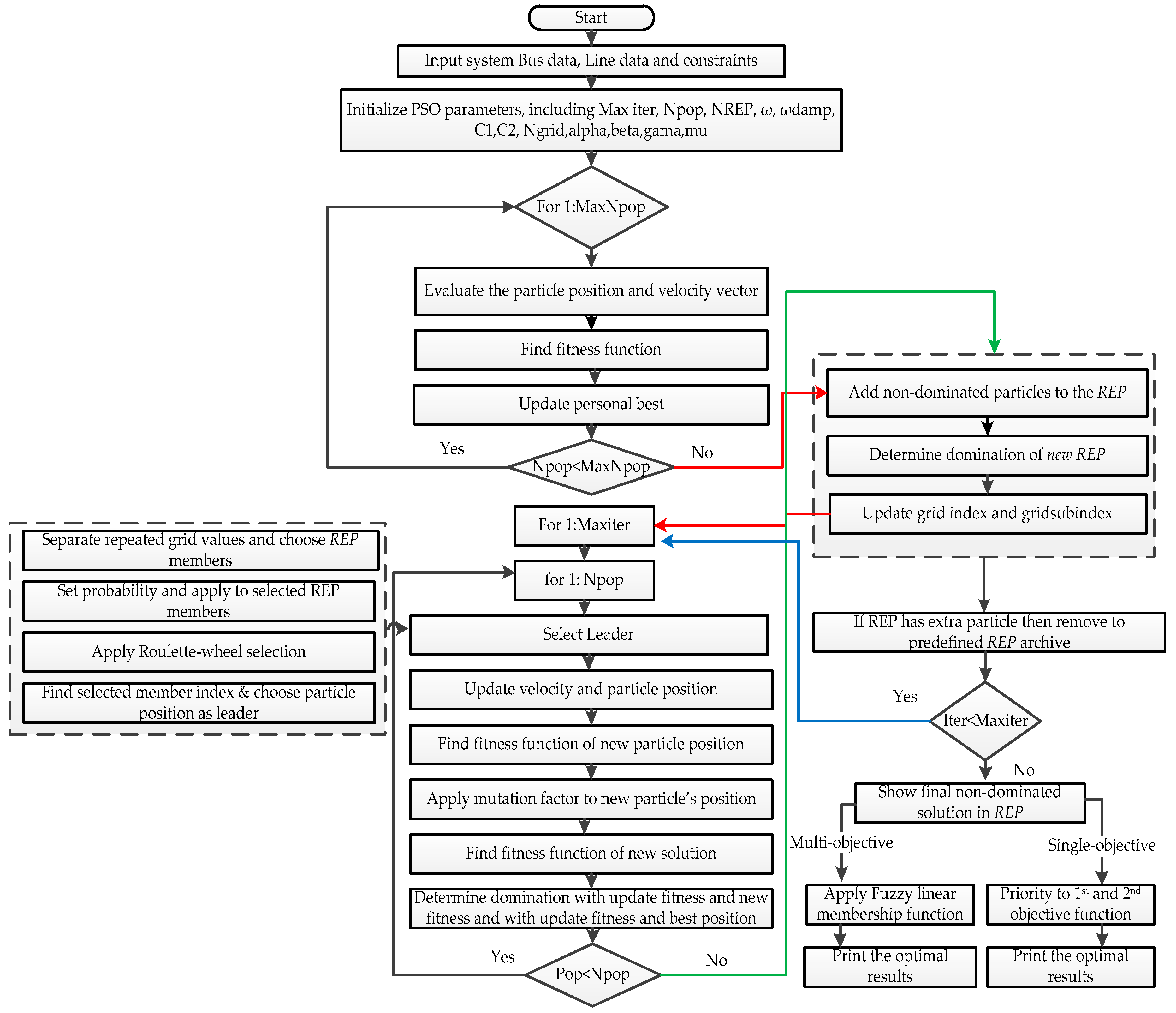
Multi-Objective Particle Swarm Optimization (PSO) Optimization Algorithm
| Algorithm 1. Pseudocode for mutation operator |
| % mu = mutation rate % rr = reducing rate % iter = current iteration % maxiter = maximum iteration % varmax = particle’s upper boundary % varmin = particle’s lower boundary |
| 1: initialize reducing rate (rr) |
| rr = (1 − (iter − 1)/(maxiter − 1))^(1/mu) |
| 2: if rand < rr |
| 3: function mutation_factor (particle, rr, varmax, varmin) |
| 4: Calculate mutation range (m_range) |
| m_range = (varmax − varmin) × rr |
| 5: Assign particle’s upper and lower bounds |
| ub = particle + m_range |
| lb = particle − m_range |
| 6: Verify particle’s upper and lower bounds |
| if ub > varmax then ub = varmax |
| if lb < varmin then lb = varmin |
| 7: Assign new values to particle within upper and lower bounds |
| particle = unifrnd (lb, ub) |
| 8: end function |
- Initialization: initialize the population.
- For .
- Initialize .
- Initialize the velocity of each particle.
- For .
- Initialize .
- Run load flow and find the fitness function of each particle in population.
- Update the personal best .
- Determine domination among the particles and save the non-dominated particles in repository archive (). The new generated solutions are added to repository and the dominated solutions are removed from repository.
- Find the leader (global best) from of every particle.
- In order to select the leader from members of the repository front, firstly the member of repository front is gridded and then the roulette wheel technique is used so that cells with lower congestion have more chance to be selected. Finally, one of the selected grid’s members is chosen randomly.
- Update the speed of each particle using Equation (22).
- Update the new position of each particle (personal best) using Equations (23)–(25).
- Run load flow and find the fitness function of each particle in population.
- Apply mutation factor.
- Add non-dominated solution set of the recent population in the repository.
- Determine the domination among the particles and save the non-dominated particles in repository archive .
- Check the size of the repository. If the repository exceeds the predefined limit, remove the extra members.
- If the convergence of algorithm occurs, the operation will stop, otherwise, go to step 6.
- The rest of the members in the repository will be taken for the final solution.
- For single-objective, the priority is given to only that objective function.
- For multi-objective, the optimal compromise solution will be chosen.
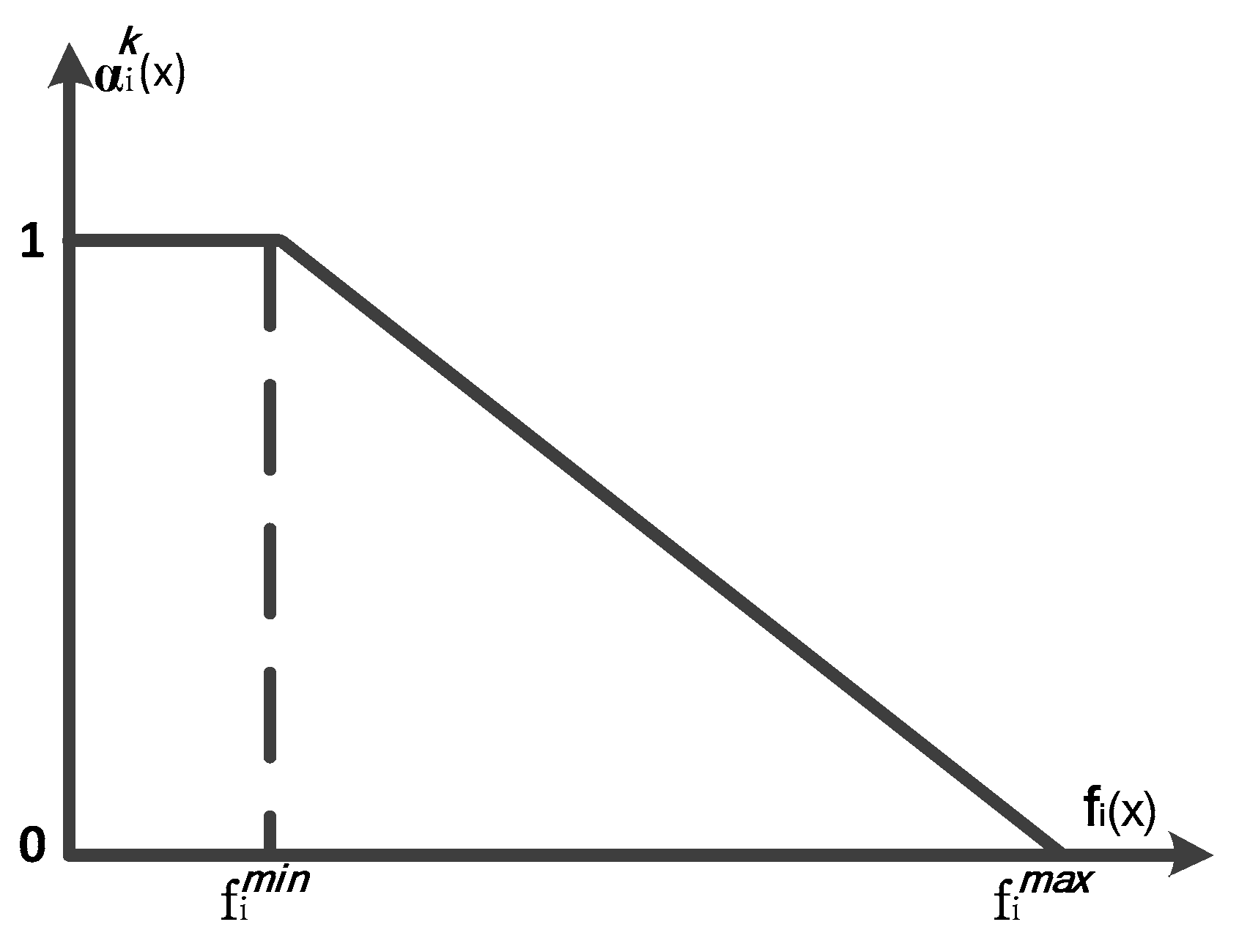
5. Fuzzy Decision Model
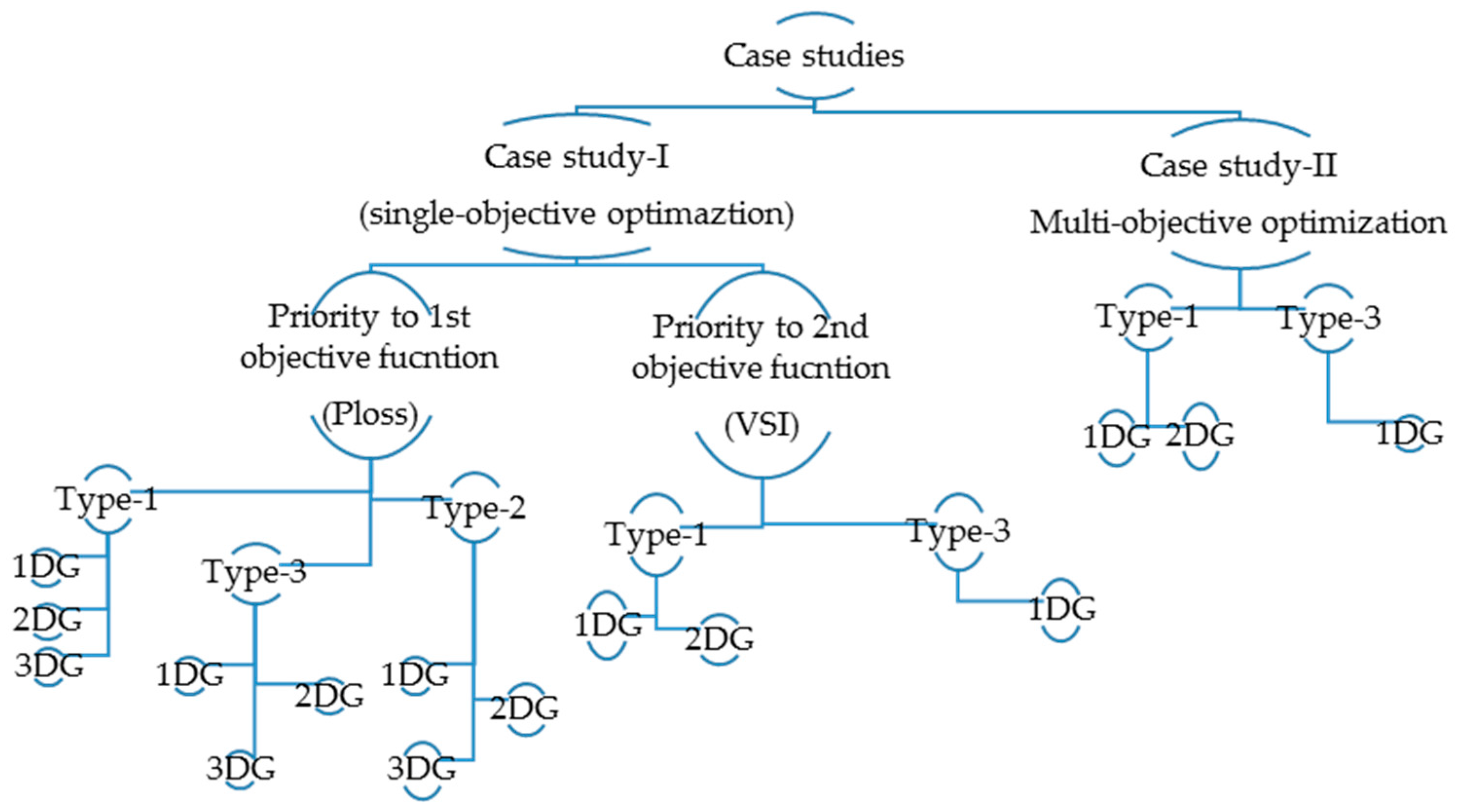
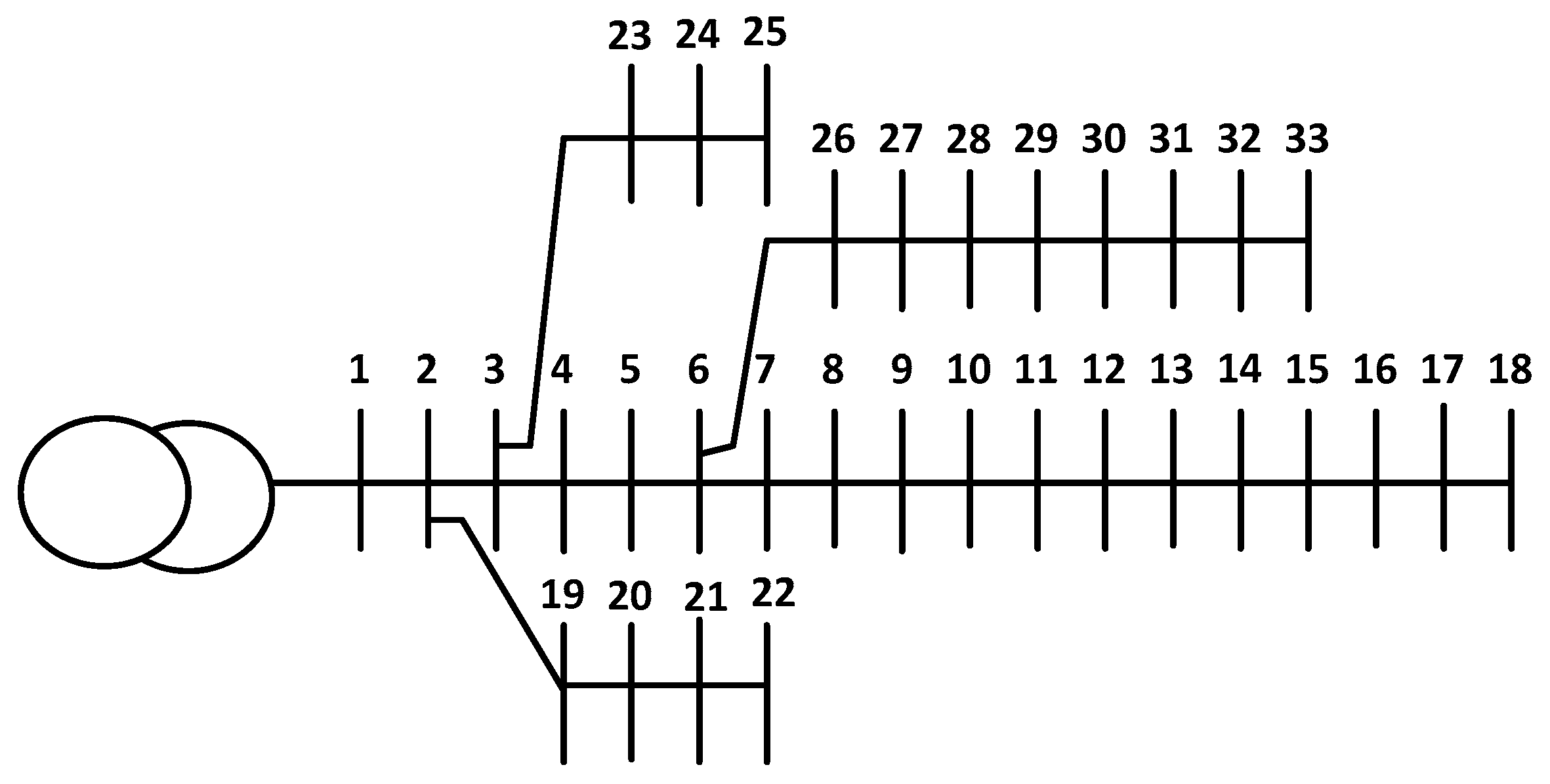
6. Case Studies
6.1. Case Study-I: Single-Objective Optimization
6.1.1. Priority to 1st Objective Function (Ploss)
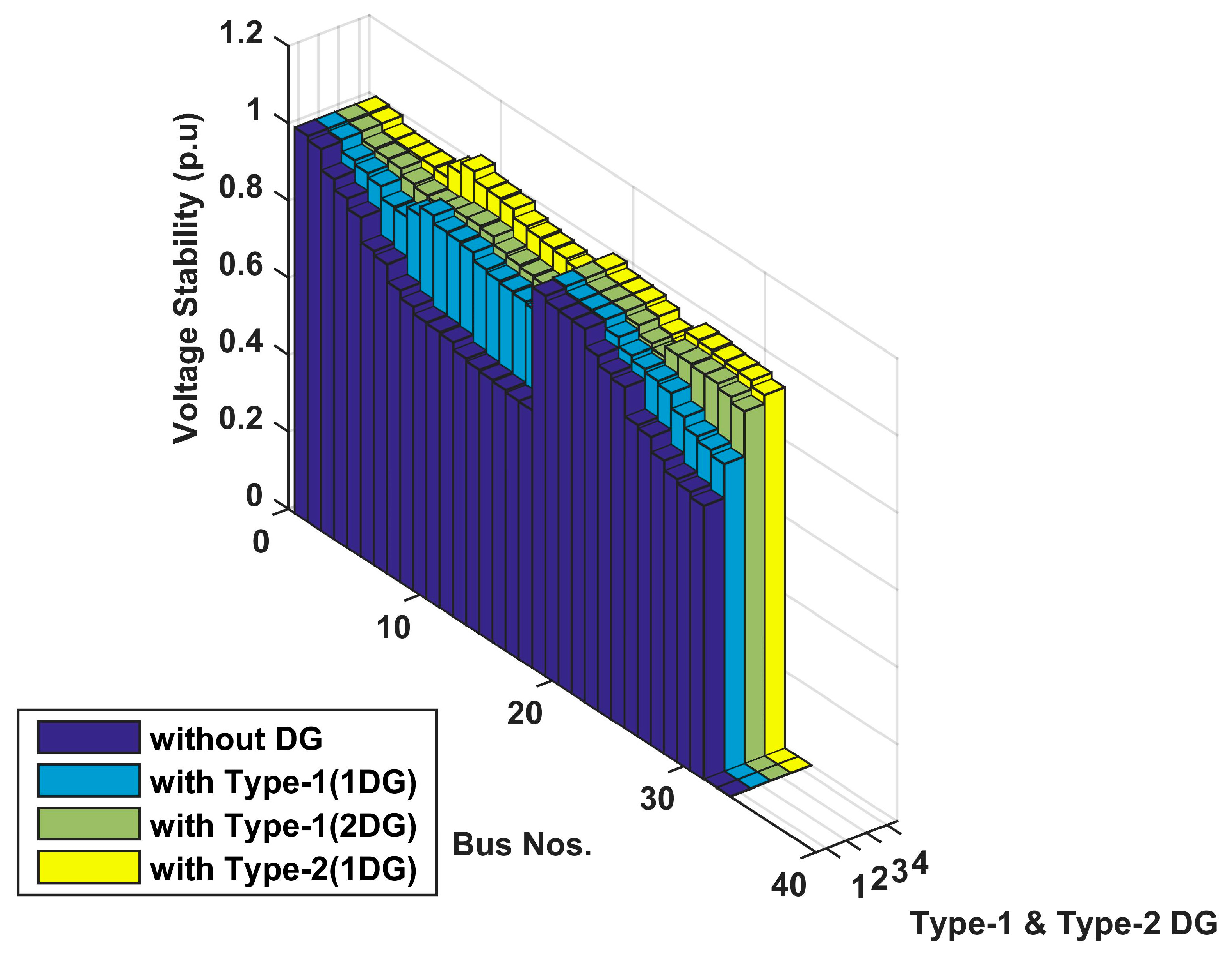
6.1.2. Priority to 2nd Objective Function (VSI)
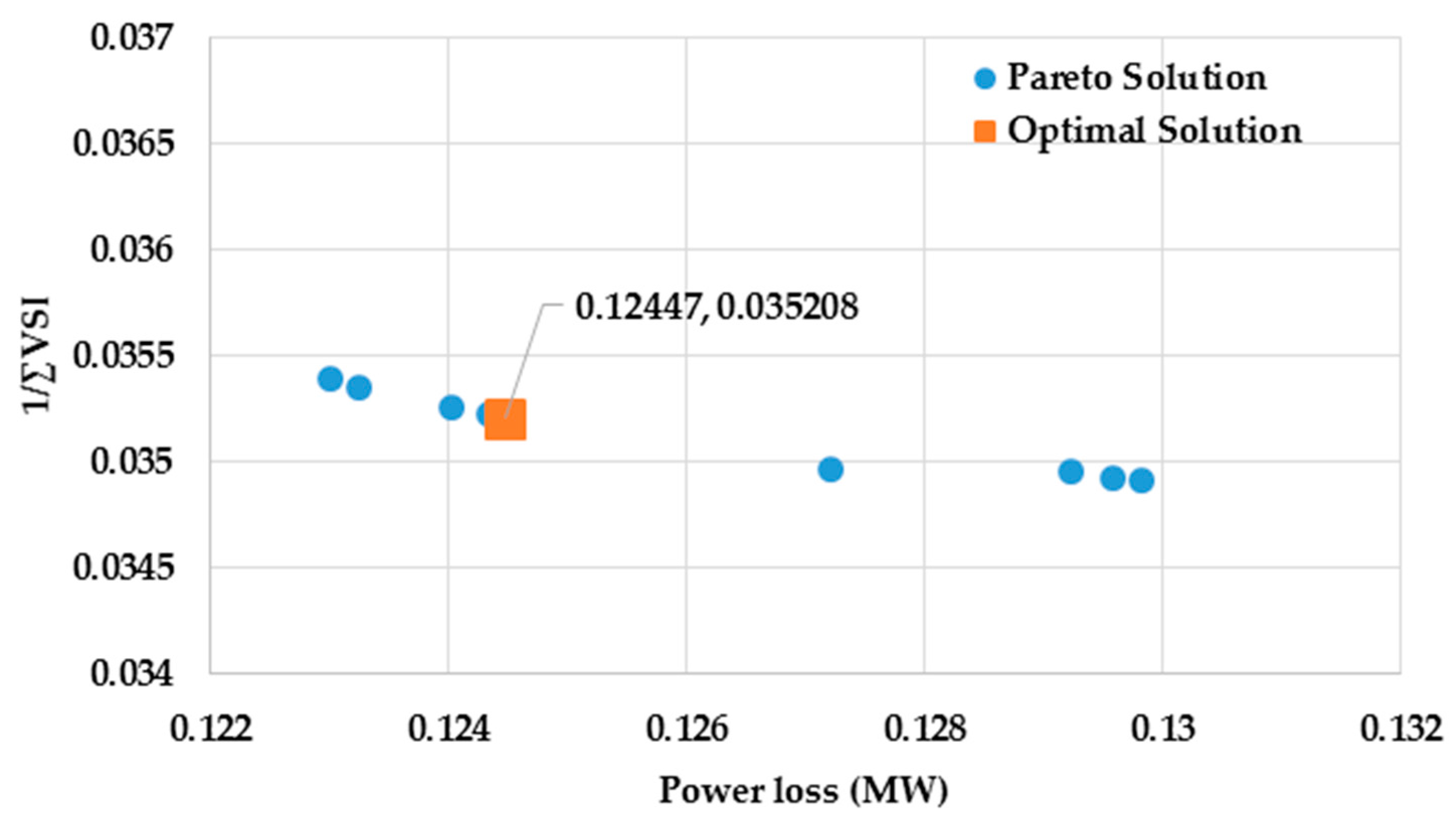
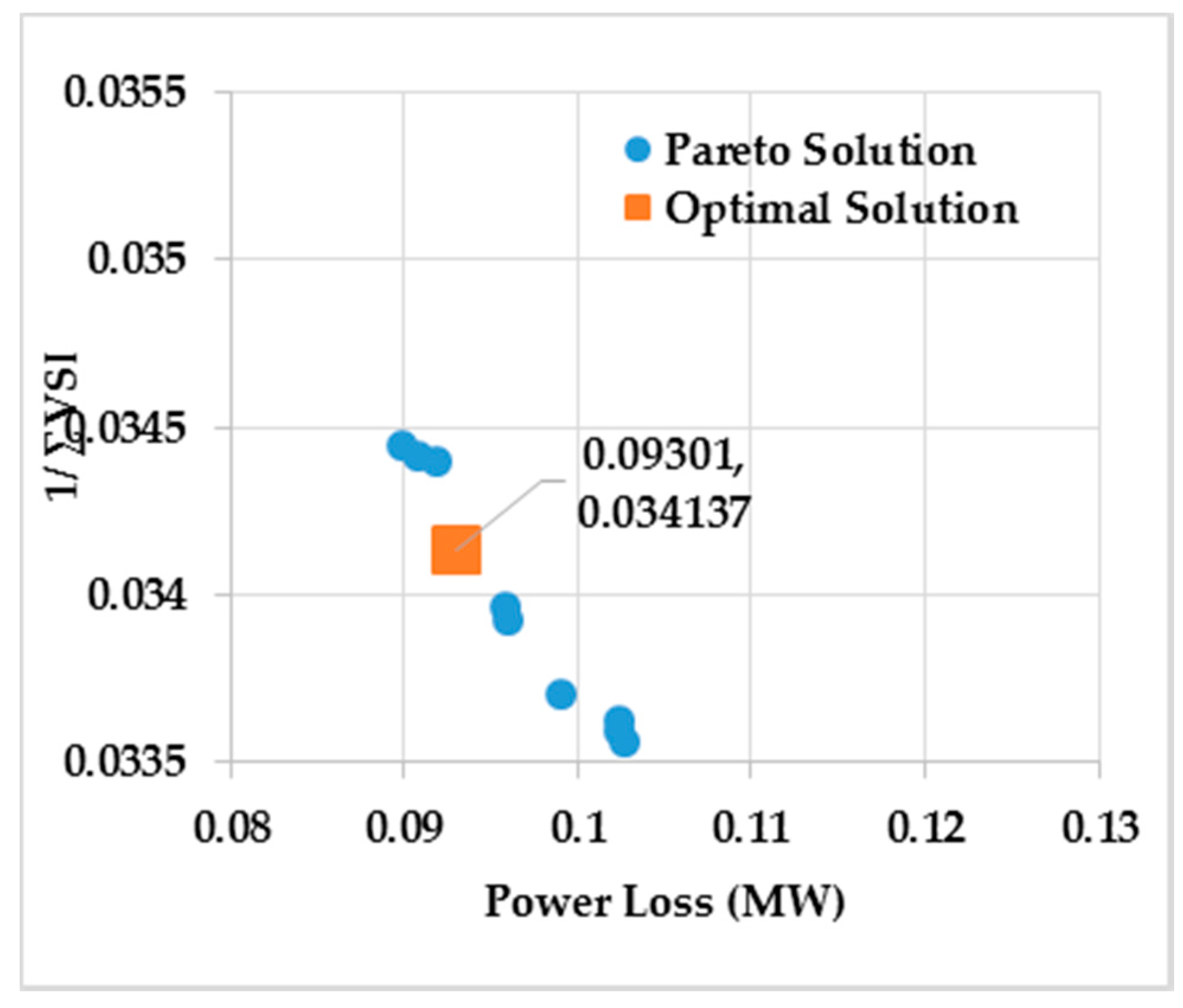
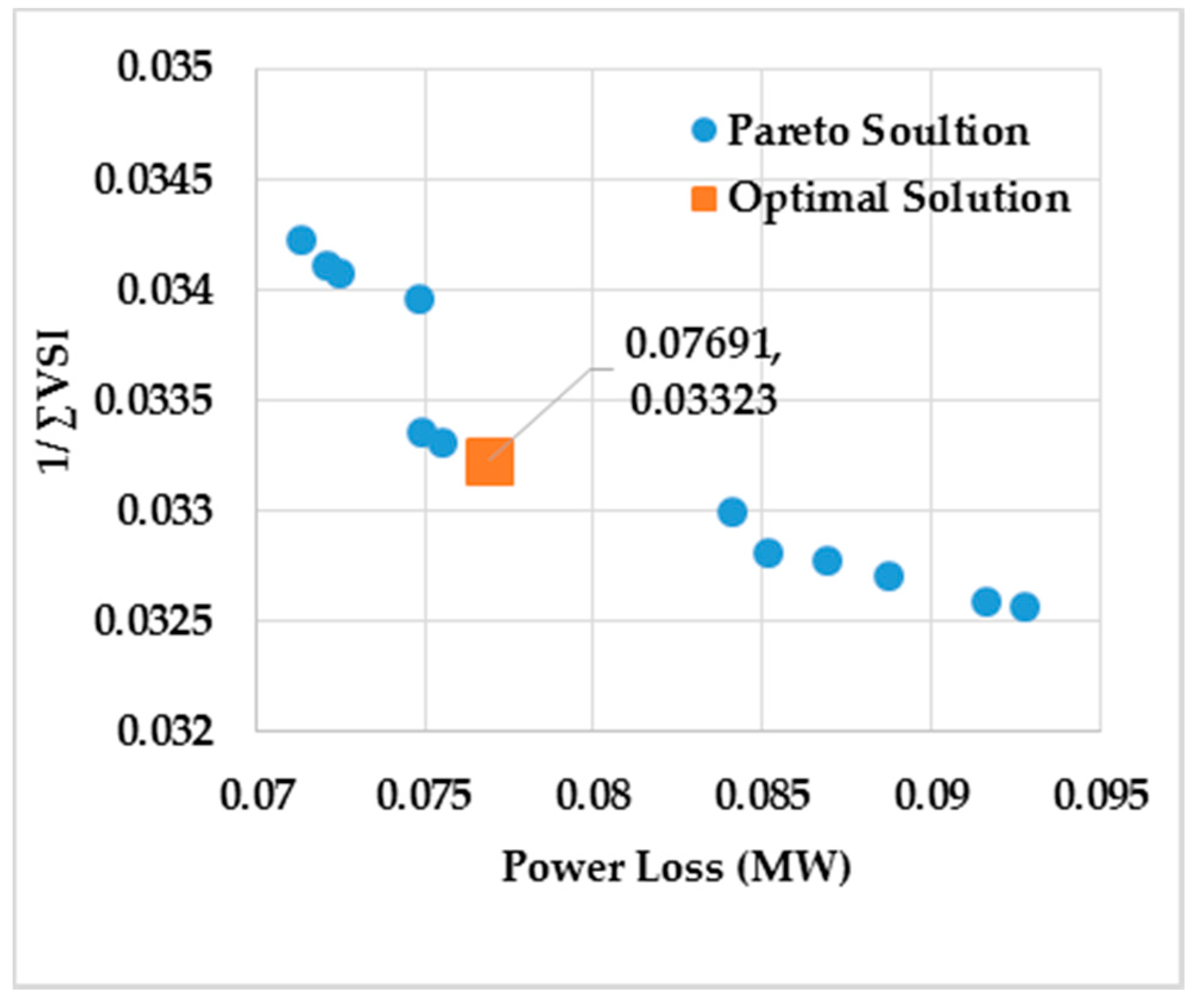
6.2. Case Study-II: Multi-Objective Optimization
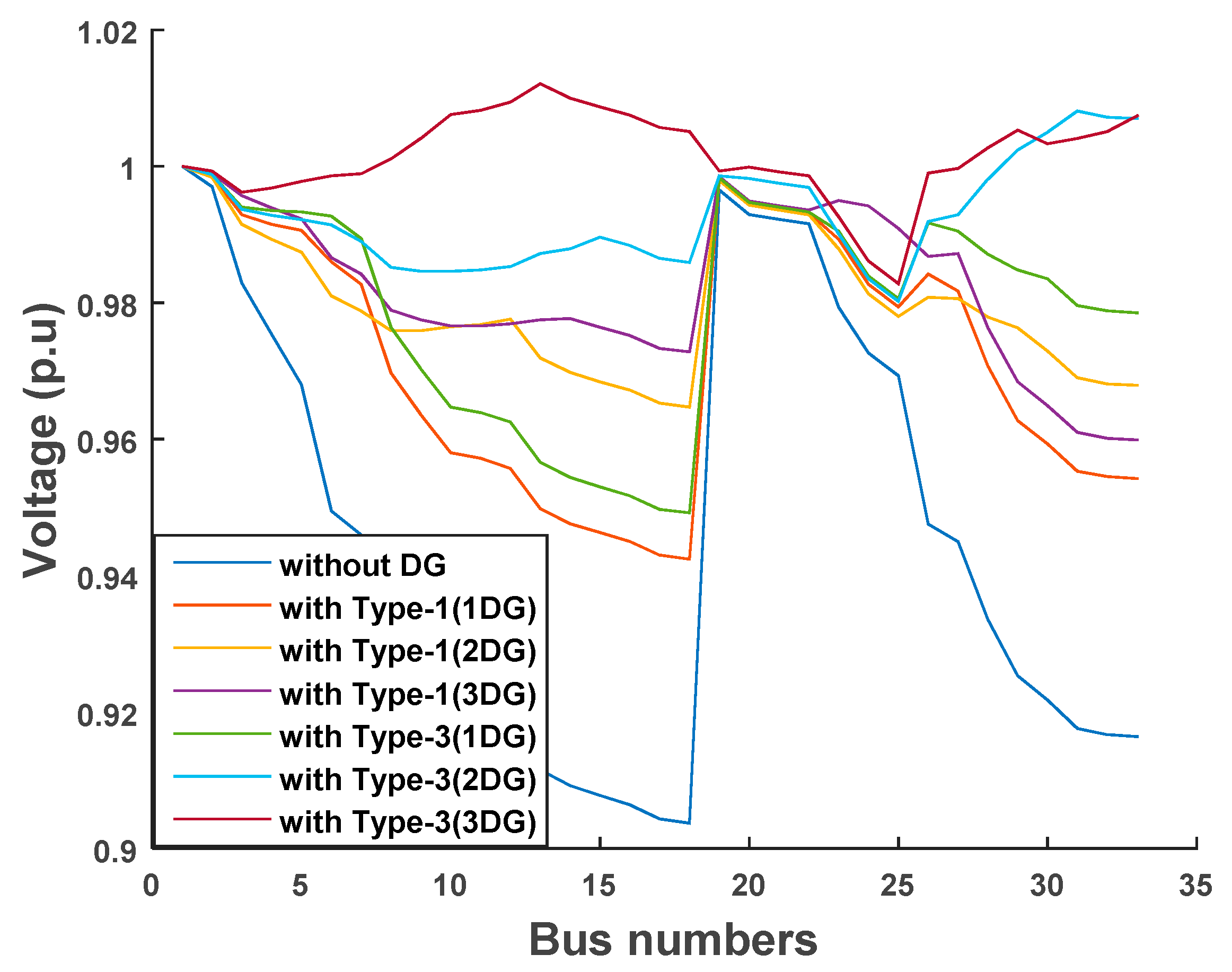
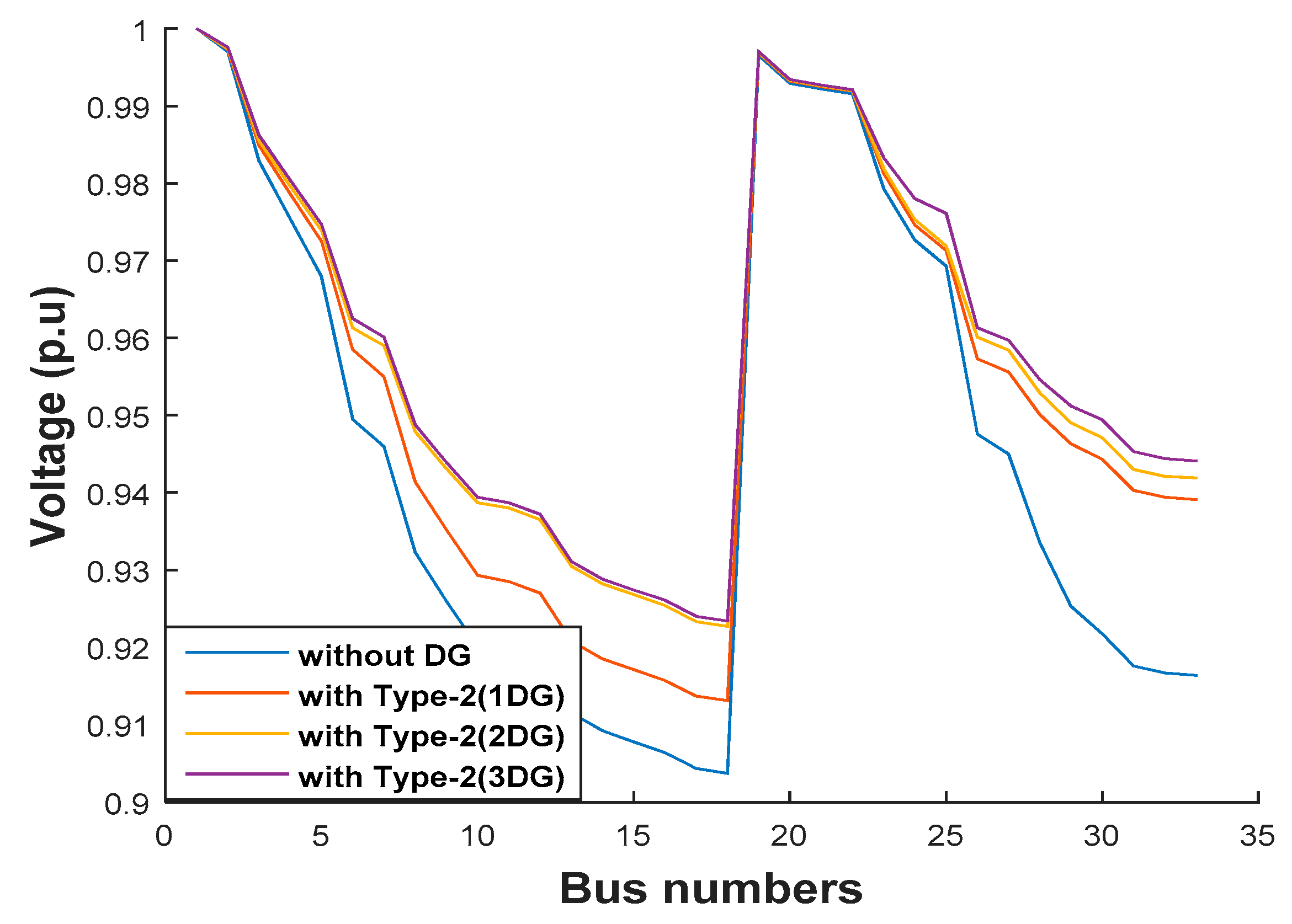
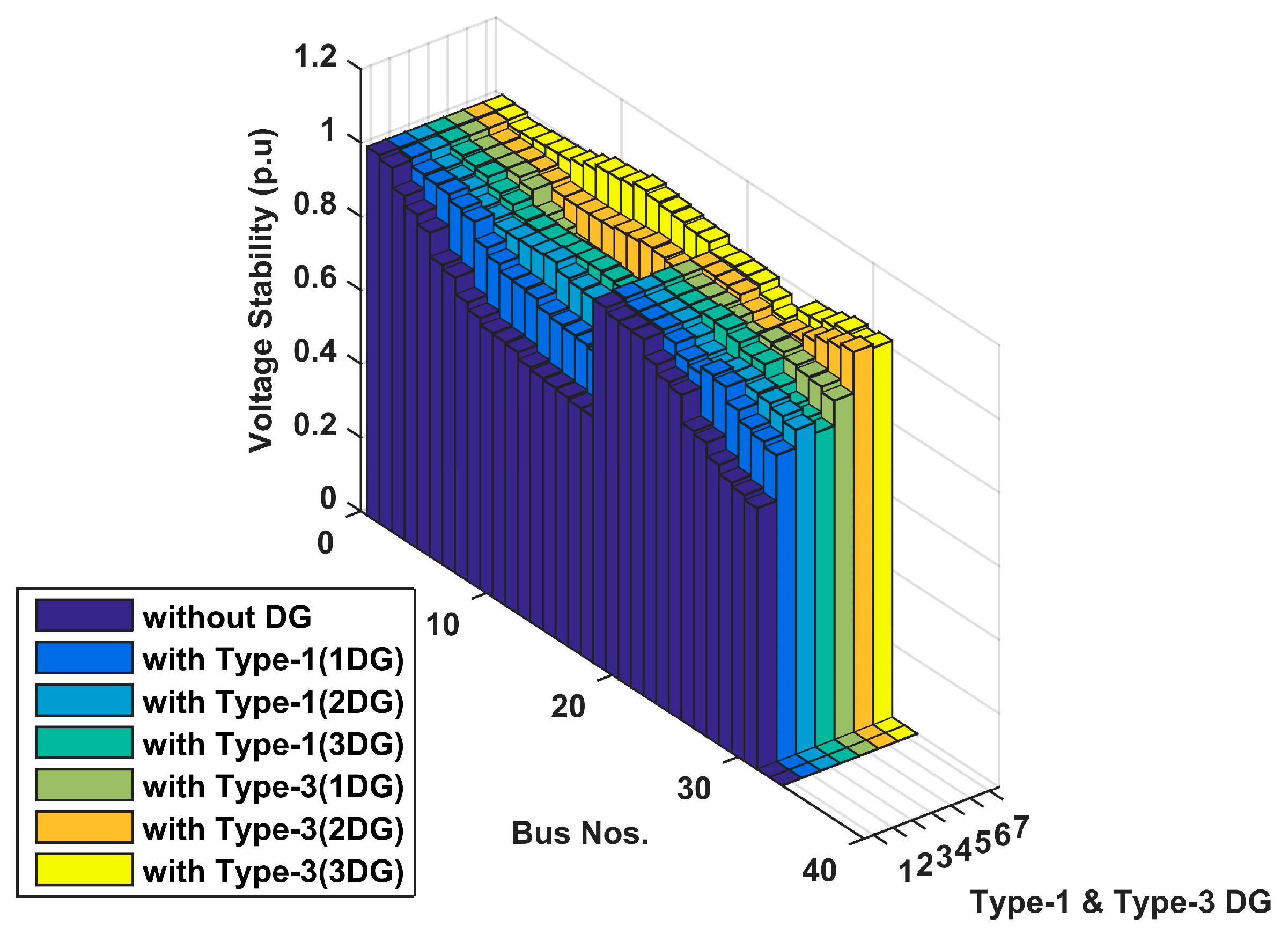
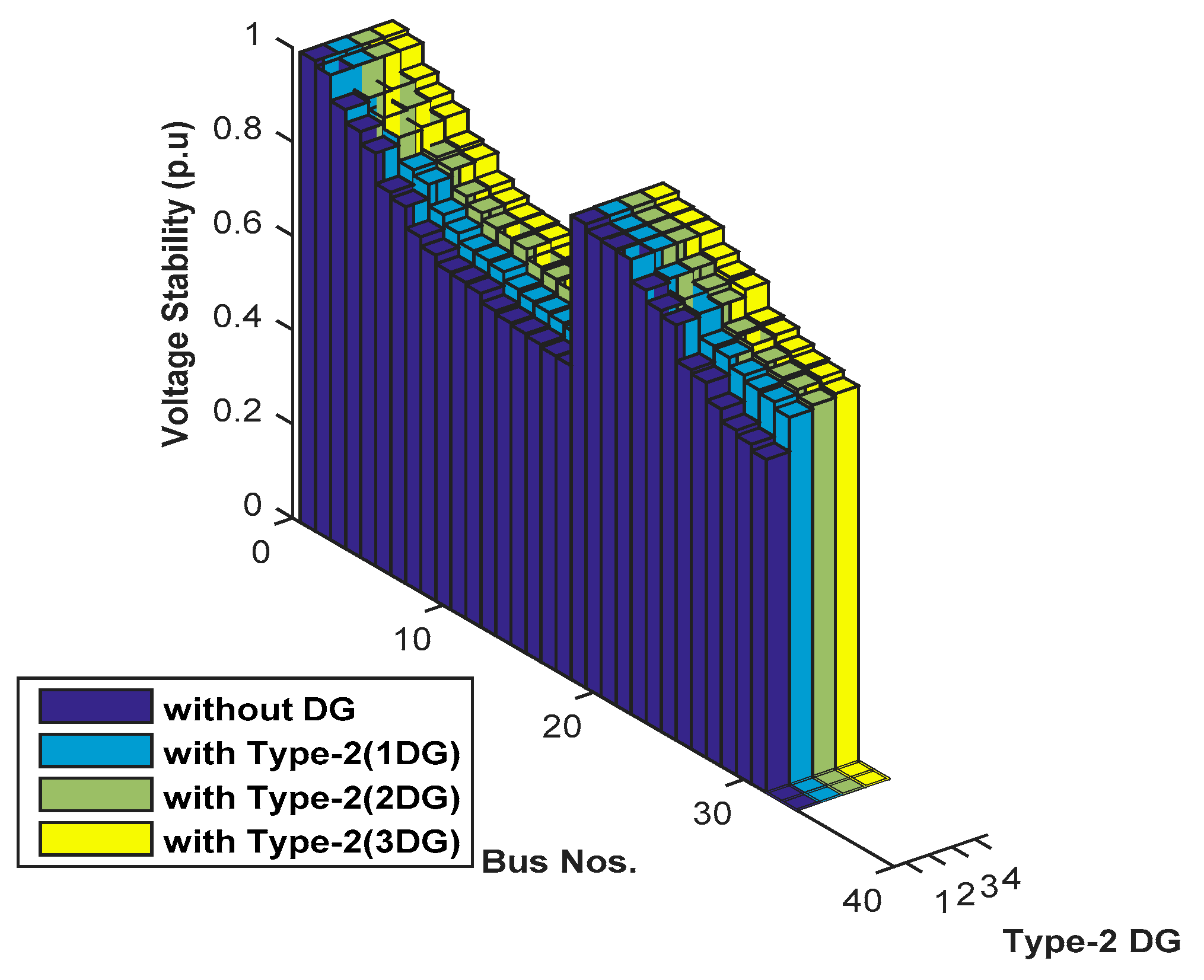
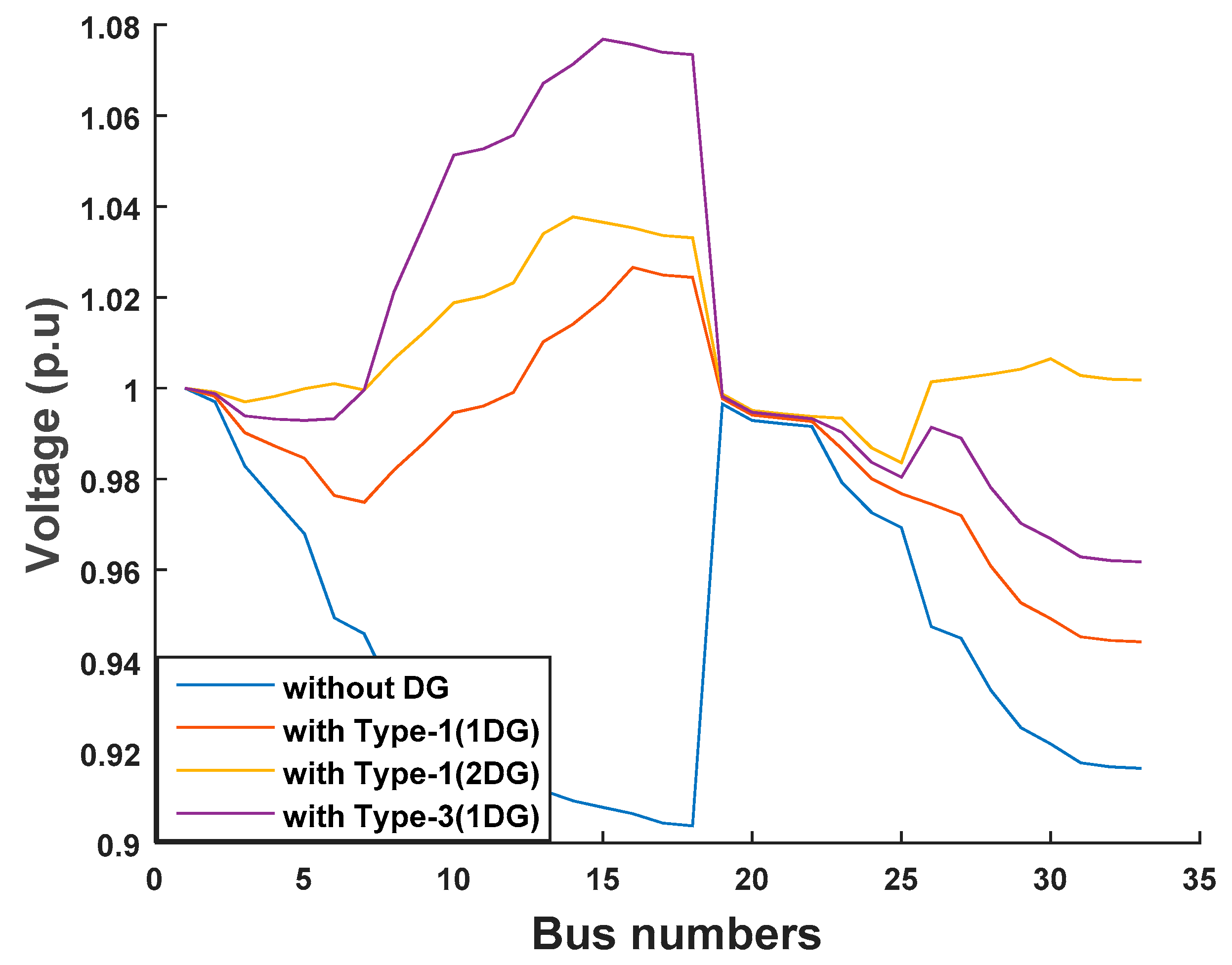
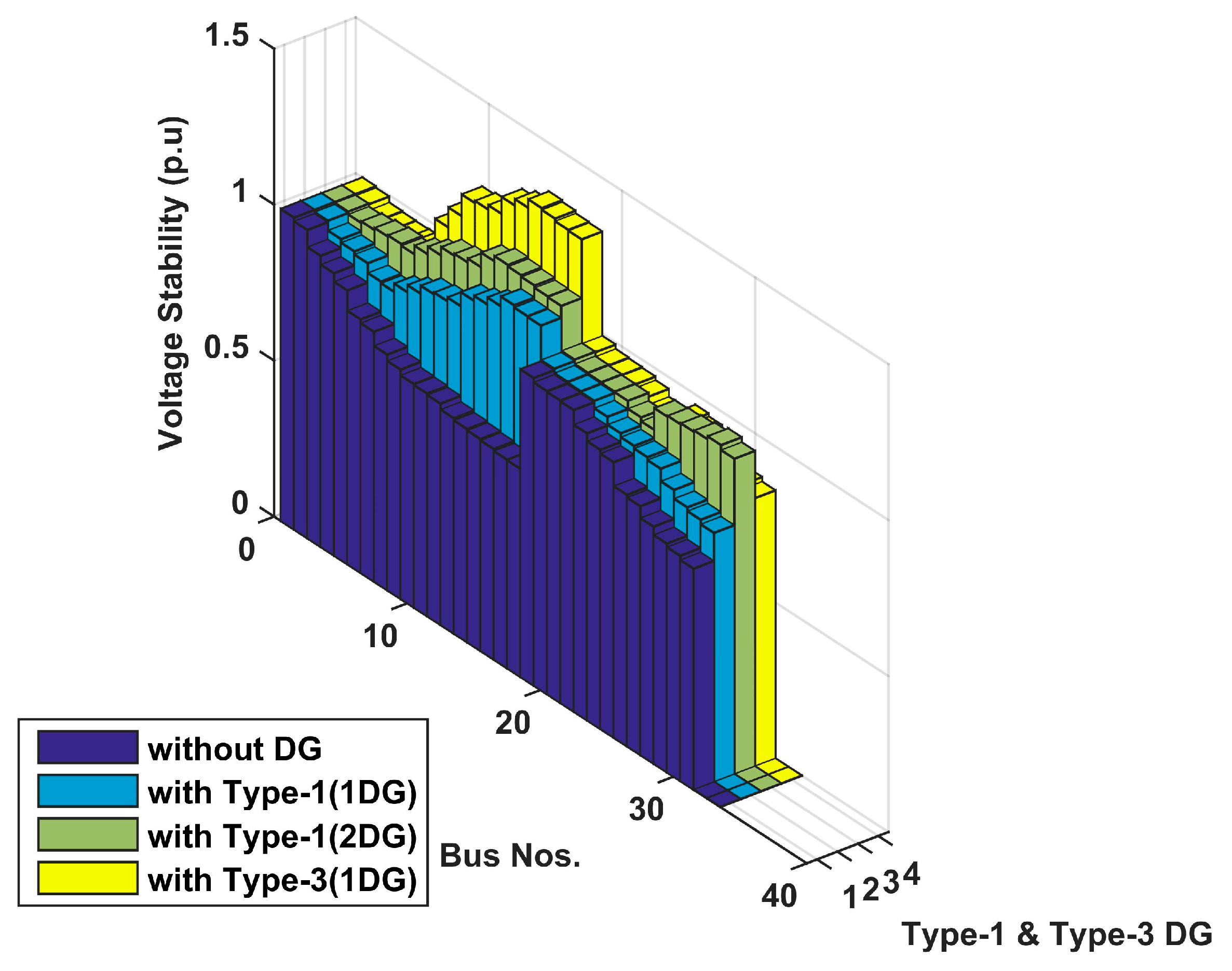
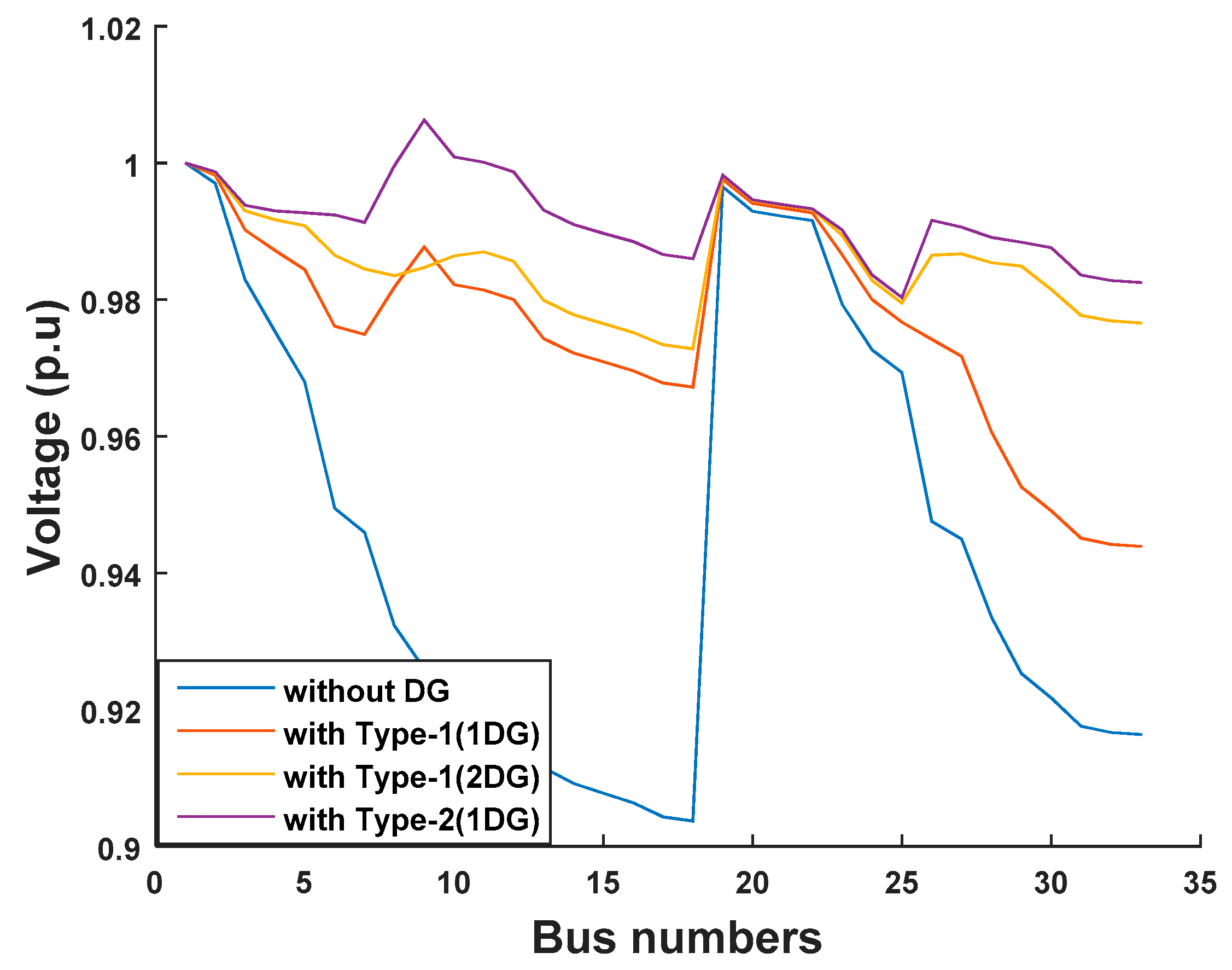
Voltage Profile and Voltage Stability for Case Study-II
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Volt | |
| Kilo/mega watt | |
| Kilo-volt/mega-volt ampere | |
| Kilo-volt/mega-volt ampere reactive | |
| m1 and m2 are buses name | |
| is the branch name connected between bus m1 and m2 | |
| Per unit | |
| Active power DG | |
| min. value of Active power DG | |
| max. value of Active power DG | |
| reactive power DG | |
| min. value of reactive power DG | |
| max. value of reactive power DG | |
| Voltage stability indicator | |
| Multi-objective optimization | |
| Multi-objective particle swarm optimization | |
| Distribution static compensator | |
| Obj-1 | Objective-1 |
| Obj-2 | Objective-2 |
| BA | Bat algorithm |
| ABC | Artificial bee colony |
| BSA | Backtracking search algorithm |
References
- El-Fergany, A. Optimal allocation of multi-type distributed generators using backtracking search optimization algorithm. Int. J. Electr. Power Energy Syst. 2015, 64, 1197–1205. [Google Scholar] [CrossRef]
- Kansal, S.; Kumar, V.; Tyagi, B. Optimal placement of different type of DG sources in distribution networks. Int. J. Electr. Power Energy Syst. 2013, 53, 752–760. [Google Scholar] [CrossRef]
- Yammani, C.; Maheswarapu, S.; Matam, S.K. A Multi-objective Shuffled Bat algorithm for optimal placement and sizing of multi distributed generations with different load models. Int. J. Electr. Power Energy Syst. 2016, 79, 120–131. [Google Scholar] [CrossRef]
- Peng, X.; Lin, L.; Zheng, W.; Liu, Y. Crisscross Optimization Algorithm and Monte Carlo Simulation for Solving Optimal Distributed Generation Allocation Problem. Energies 2015, 8, 13641–13659. [Google Scholar] [CrossRef]
- Prakash, P.; Khatod, D.K. Optimal sizing and siting techniques for distributed generation in distribution systems: A review. Renew. Sustain. Energy Rev. 2016, 57, 111–130. [Google Scholar] [CrossRef]
- Acharya, N.; Mahat, P.; Mithulananthan, N. An analytical approach for DG allocation in primary distribution network. Int. J. Electr. Power Energy Syst. 2006, 28, 669–678. [Google Scholar] [CrossRef]
- Quoc, H.D.; Mithulananthan, N. An optimal operating strategy of DG unit for power loss reduction in distribution systems. In Proceedings of the 2012 7th IEEE International Conference on Industrial and Information Systems (ICIIS), Chennai, India, 6–9 August 2012; pp. 1–6.
- Hung, D.Q.; Mithulananthan, N.; Bansal, R. Analytical strategies for renewable distributed generation integration considering energy loss minimization. Appl. Energy 2013, 105, 75–85. [Google Scholar] [CrossRef]
- Aman, M.; Jasmon, G.; Mokhlis, H.; Bakar, A. Optimal placement and sizing of a DG based on a new power stability index and line losses. Int. J. Electr. Power Energy Syst. 2012, 43, 1296–1304. [Google Scholar] [CrossRef]
- Keane, A.; O’Malley, M. Optimal utilization of distribution networks for energy harvesting. IEEE Trans. Power Syst. 2007, 22, 467–475. [Google Scholar] [CrossRef]
- Keane, A.; O’Malley, M. Optimal allocation of embedded generation on distribution networks. IEEE Trans. Power Syst. 2005, 20, 1640–1646. [Google Scholar] [CrossRef]
- Atwa, Y.; El-Saadany, E. Probabilistic approach for optimal allocation of wind-based distributed generation in distribution systems. IET Renew. Power Gener. 2011, 5, 79–88. [Google Scholar] [CrossRef]
- Atwa, Y.; El-Saadany, E.; Salama, M.; Seethapathy, R. Optimal renewable resources mix for distribution system energy loss minimization. IEEE Trans. Power Syst. 2010, 25, 360–370. [Google Scholar] [CrossRef]
- Abdelsalam, A.A.; Zidan, A.A.; El-Saadany, E.F. Optimal DG Allocation in Radial Distribution Systems with High Penetration of Non-linear Loads. Electr. Power Compon. Syst. 2015, 43, 1487–1497. [Google Scholar] [CrossRef]
- Yuvaraj, T.; Ravi, K.; Devabalaji, K. DSTATCOM allocation in distribution networks considering load variations using bat algorithm. Ain Shams Eng. J. 2015. [Google Scholar] [CrossRef]
- Mohandas, N.; Balamurugan, R.; Lakshminarasimman, L. Optimal location and sizing of real power DG units to improve the voltage stability in the distribution system using ABC algorithm united with chaos. Int. J. Electr. Power Energy Syst. 2015, 66, 41–52. [Google Scholar] [CrossRef]
- Devabalaji, K.; Ravi, K.; Kothari, D. Optimal location and sizing of capacitor placement in radial distribution system using Bacterial Foraging Optimization Algorithm. Int. J. Electr. Power Energy Syst. 2015, 71, 383–390. [Google Scholar] [CrossRef]
- Imran, A.M.; Kowsalya, M. Optimal size and siting of multiple distributed generators in distribution system using bacterial foraging optimization. Swarm Evol. Comput. 2014, 15, 58–65. [Google Scholar] [CrossRef]
- El-Fergany, A. Multi-objective Allocation of Multi-type Distributed Generators along Distribution Networks Using Backtracking Search Algorithm and Fuzzy Expert Rules. Electr. Power Compon. Syst. 2016, 44, 252–267. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Hegazy, Y.G.; El-Khattam, W.; Othman, M.M. A Multi-objective Optimization for Sizing and Placement of Voltage-controlled Distributed Generation Using Supervised Big Bang-Big Crunch Method. Electr. Power Compon. Syst. 2015, 43, 105–117. [Google Scholar] [CrossRef]
- Moradi, M.H.; Zeinalzadeh, A.; Mohammadi, Y.; Abedini, M. An efficient hybrid method for solving the optimal sitting and sizing problem of DG and shunt capacitor banks simultaneously based on imperialist competitive algorithm and genetic algorithm. Int. J. Electr. Power Energy Syst. 2014, 54, 101–111. [Google Scholar] [CrossRef]
- Mistry, K.D.; Roy, R. Enhancement of loading capacity of distribution system through distributed generator placement considering techno-economic benefits with load growth. Int. J. Electr. Power Energy Syst. 2014, 54, 505–515. [Google Scholar] [CrossRef]
- Elsheikh, A.; Helmy, Y.; Abouelseoud, Y.; Elsherif, A. Optimal capacitor placement and sizing in radial electric power systems. Alex. Eng. J. 2014, 53, 809–816. [Google Scholar] [CrossRef]
- Devi, S.; Geethanjali, M. Optimal location and sizing determination of Distributed Generation and DSTATCOM using Particle Swarm Optimization algorithm. Int. J. Electr. Power Energy Syst. 2014, 62, 562–570. [Google Scholar] [CrossRef]
- Kayal, P.; Chanda, C. Strategic approach for reinforcement of intermittent renewable energy sources and capacitor bank for sustainable electric power distribution system. Int. J. Electr. Power Energy Syst. 2016, 83, 335–351. [Google Scholar] [CrossRef]
- Gong, Q.; Lei, J.; Ye, J. Optimal Siting and Sizing of Distributed Generators in Distribution Systems Considering Cost of Operation Risk. Energies 2016, 9, 61. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, J.; Yang, J.; Liang, H.; Zhang, J. Multi-objective planning of multi-type distributed generation considering timing characteristics and environmental benefits. Energies 2014, 7, 6242–6257. [Google Scholar] [CrossRef]
- Farjah, E.; Bornapour, M.; Niknam, T.; Bahmanifirouzi, B. Placement of combined heat, power and hydrogen production fuel cell power plants in a distribution network. Energies 2012, 5, 790–814. [Google Scholar] [CrossRef]
- Liu, K.-Y.; Sheng, W.; Liu, Y.; Meng, X.; Liu, Y. Optimal sitting and sizing of DGs in distribution system considering time sequence characteristics of loads and DGs. Int. J. Electr. Power Energy Syst. 2015, 69, 430–440. [Google Scholar] [CrossRef]
- Sheng, W.; Liu, K.; Liu, Y.; Meng, X.; Li, Y. Optimal Placement and Sizing of Distributed Generation via an Improved Nondominated Sorting Genetic Algorithm II. IEEE Trans. Power Deliv. 2015, 30, 569–578. [Google Scholar] [CrossRef]
- Zeinalzadeh, A.; Mohammadi, Y.; Moradi, M.H. Optimal multi objective placement and sizing of multiple DGs and shunt capacitor banks simultaneously considering load uncertainty via MOPSO approach. Int. J. Electr. Power Energy Syst. 2015, 67, 336–349. [Google Scholar] [CrossRef]
- Aman, M.M.; Jasmon, G.B.; Bakar, A.H.A.; Mokhlis, H. A new approach for optimum simultaneous multi-DG distributed generation Units placement and sizing based on maximization of system loadability using HPSO (hybrid particle swarm optimization) algorithm. Energy 2014, 66, 202–215. [Google Scholar] [CrossRef]
- Haque, M. Efficient load flow method for distribution systems with radial or mesh configuration. IEE Proc. Gener. Transm. Distrib. 1996, 143, 33–38. [Google Scholar] [CrossRef]
- Sajjadi, S.M.; Haghifam, M.R.; Salehi, J. Simultaneous placement of distributed generation and capacitors in distribution networks considering voltage stability index. Int. J. Electr. Power Energy Syst. 2013, 46, 366–375. [Google Scholar] [CrossRef]
- Chakravorty, M.; Das, D. Voltage stability analysis of radial distribution networks. Int. J. Electr. Power Energy Syst. 2001, 23, 129–135. [Google Scholar] [CrossRef]
- Kennedy, J. Particle swarm optimization. In Encyclopedia of Machine Learning; Springer: New York, NY, USA, 2010; pp. 760–766. [Google Scholar]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Kansal, S.; Sai, B.B.; Tyagi, B.; Kumar, V. Optimal placement of distributed generation in distribution networks. Int. J. Eng. Sci. Technol. 2011, 3, 47–55. [Google Scholar] [CrossRef]
- Oda, E.S.; Abdelsalam, A.A.; Abdel-Wahab, M.N.; El-Saadawi, M.M. Distributed generations planning using flower pollination algorithm for enhancing distribution system voltage stability. Ain Shams Eng. J. 2015. [Google Scholar] [CrossRef]
- Gözel, T.; Eminoglu, U.; Hocaoglu, M. A tool for voltage stability and optimization (VS&OP) in radial distribution systems using matlab graphical user interface (GUI). Simul. Model. Pract. Theory 2008, 16, 505–518. [Google Scholar]
- Moradi, M.H.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar] [CrossRef]
- Manafi, H.; Ghadimi, N.; Ojaroudi, M.; Farhadi, P. Optimal placement of distributed generations in radial distribution systems using various PSO and DE algorithms. Elektron. Elektrotech. 2013, 19, 53–57. [Google Scholar] [CrossRef]
- Moradi, M.H.; Tousi, S.R.; Abedini, M. Multi-objective PFDE algorithm for solving the optimal siting and sizing problem of multiple DG sources. Int. J. Electr. Power Energy Syst. 2014, 56, 117–126. [Google Scholar] [CrossRef]
- Injeti, S.K.; Kumar, N.P. A novel approach to identify optimal access point and capacity of multiple DGs in a small, medium and large scale radial distribution systems. Int. J. Electr. Power Energy Syst. 2013, 45, 142–151. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DG-Type | DG No. | DG Location | DG Size (MW) | Ploss (kW) | VSI | Reduction in Ploss (%) |
|---|---|---|---|---|---|---|
| Base-case | - | - | - | 211 | 25.125 | |
| Type-1 | 1 DG | 7 | 2.0 | 115.17 | 27.326 | 45.41 |
| 2 DG | 13, 31 | 1.1115, 1.4882 | 87.8 | 28.75 | 57.42 | |
| 3 DG | 14, 24, 27 | 0.70027, 1.0089, 1.62850 | 79.4 | 29.05 | 62.37 | |
| Type-2 | 1 DG | 30 | 1.2807 | 151.4 | 26.192 | 28.24 |
| 2 DG | 12, 30 | 0.44219, 1.2062 | 142.5 | 26.75 | 32.46 | |
| 3 DG | 30, 30, 12 | 1.06288, 0.3525, 0.4533 | 140 | 26.83 | 33.64 | |
| Type-3 | 1-1 DG (P) | 8 | 1.911 | 64.78 | 29.19 | 69.29 |
| 1-1 DG (Q) | 30 | 1.253 | ||||
| 2-2 DG (P) | 15, 31 | 0.8258, 1.1288 | 40.2 | 30.025 | 80.94 | |
| 2-2 DG (Q) | 30, 20 | 1.4424, 0.3717 | ||||
| 3-3 DG (P) | 20, 29, 13 | 0.447, 1.3574, 0.9058 | 34.5 | 31.173 | 83.64 | |
| 3-3 DG (Q) | 12, 5, 33 | 0.663, 0.6557, 0.78976 |
| Method | DG Size & Location | Ploss (kW) | Method | DG Size & Location | Ploss (kW) |
| 1 DG | 2 DG | ||||
| Proposed method | 2.0 at 7 | 115.17 | Proposed method | 1.2603 at 29 | 87.8 |
| 2.589 x at 06 | 111.0 | 0.9277 at 13 | |||
| AM [6] | 2.600 at 06 | 111.0 | FPA [39] | 1.0339 at 12 | 89.2 |
| GSA [40] | 2.600 at 06 | 111.0 | 1.0866 at 30 | ||
| PSO [2] | 2.600 at 06 | 111.0 | |||
| FPA [39] | 2.000 at 07 | 115.17 | |||
| Method | DG Size & Location | Ploss (kW) | Method | DG Size & Location | Ploss (kW) |
| 3 DG | |||||
| Proposed method | 0.70027 at 14 | 79.40 | GA/PSO [41] | 1.2000 at 32 | 103.40 |
| 1.0089 at 24 | 0.8630 at 16 | ||||
| 1.62850 at 27 | 0.9250 at 11 | ||||
| LSFSA [44] | 1.1124 at 06 | 82.80 | PSO [41] | 0.9816 at 13 | 105.30 |
| 0.4874 at 18 | 0.8297 at 32 | ||||
| 0.8679 at 32 | 1.1768 at 08 | ||||
| PFDE [43] | 0.9100 at 13 | 88.00 | GA [41] | 1.5000 at 11 | 106.30 |
| 1.2500 at 26 | 0.4228 at 29 | ||||
| 0.8800 at 32 | 1.0714 at 30 | ||||
| DAPSO [42] | 0.6810 at 10 | 92.55 | |||
| 0.600 at 18 | |||||
| 0.7190 at 31 | |||||
| DG Type | DG No. | Voltage (p.u) | Voltage Stability (p.u) | ||
|---|---|---|---|---|---|
| Min | Max | Min | Max | ||
| Base Case | 0.9037 at 18 | 1.00 at 1 | 0.6669 at 18 | 1.00 at 1 | |
| Type-1 | 1 DG | 0.9424 at 18 | 1.00 at 1 | 0.7888 at 18 | 1.00 at 1 |
| 2 DG | 0.9647 at 18 | 1.00 at 1 | 0.8661 at 18 | 1.00 at 1 | |
| 3 DG | 0.9728 at 18 | 1.00 at 1 | 0.8953 at 18 | 1.00 at 1 | |
| Type-2 | 1 DG | 0.9160 at 18 | 1.00 at 1 | 0.6984 at 18 | 1.00 at 1 |
| 2 DG | 0.9295 at 18 | 1.00 at 1 | 0.7405 at 18 | 1.00 at 1 | |
| 3 DG | 0.9297 at 18 | 1.00 at 1 | 0.7410 at 18 | 1.00 at 1 | |
| Type-3 | 1 DG | 0.9492 at 18 | 1.00 at 1 | 0.8116 at 18 | 1.00 at 1 |
| 2 DG | 0.9859 at 18 | 1.00 at 1 | 0.9449 at 18 | 1.00 at 1 | |
| 3 DG | 1.0051 at 18 | 1.00 at 1 & 33 | 1.020 at 18 | 1.00 at 1 | |
| DG-Type | DG No. | DG Location | DG Size (MW) | Ploss (kW) | VSI | Reduction in VSI (%) |
|---|---|---|---|---|---|---|
| Type-1 | 1 DG | 16 | 1.999 | 194.9 | 29.767 | 18.47 |
| 2 DG | 14, 30 | 1.972, 1.860 | 188.7 | 32.067 | 27.62 | |
| Type-3 | 1-1 DG (P) | 15 | 1.956 | 179.4 | 32.974 | 31.23 |
| 1-1 DG (Q) | 10 | 2.0 |
| Parameters | Type-1 (1 DG) | Type-3 (1 DG) | ||
|---|---|---|---|---|
| Proposed Method | BSA | Proposed Method | BSA | |
| 1.984 at 10 | 1.857 at 11 | 1.975 at 13 + j2 at 8 | 1.618 + j1.895 at 11 | |
| 0.9440 at 33 | 0.9438 at 33 | 0.9629 at 33 | 0.9604 at 33 | |
| 0.9982 at 2 | 0.9981 at 3 | 1.049 at 15 | 1.0049 at 11 | |
| 0.7974 at 33 | 0.7934 at 33 | 0.8630 at 33 | 0.8507 at 33 | |
| 0.9927 at 2 | 0.9926 at 2 | 1.229 at 13 | 1.2058 at 12 | |
| 29.240 | 29.237 | 32.53 | 32.051 | |
| 133.0 | 133.01 | 137.6 | 138.74 | |
| 94.1 | 93.53 | 106.3 | 105.35 | |
| DG Type | DG No. | Voltage (p.u) | Voltage Stability (p.u) | ||
|---|---|---|---|---|---|
| Min | Max | Min | Max | ||
| Base Case | 0.9037 at 18 | 1.00 at 1 | 0.6669 at 18 | 1.00 at 1 | |
| Type-1 | 1 DG | 0.9440 at 18 | 1.00 at 1 | 0.7974 at 18 | 1.00 at 1 |
| 2 DG | 0.9836 at 25 | 1.037 at 14 | 0.9360 at 25 | 1.159 at 14 | |
| Type-3 | 1 DG | 0.9629 at 33 | 1.052 at 13 | 0.86303 at 31 | 1.229 at 13 |
| Parameters | Base Case | Proposed Method | BSA | GA |
|---|---|---|---|---|
| - | 1.874 + j0 at 9 | 1.632 + j0 at 10 | 1.415 + j0 at 10 | |
| 0.9037 at 18 | 0.9439 at 33 | 0.9408 at 33 | 0.9378 at 33 | |
| 0.9970 at 2 | 0.9982 at 2 | 0.9980 at 2 | 0.9979 at 2 | |
| 0.6669 at 18 | 0.7970 at 31 | 0.7834 at 33 | 0.7735 at 33 | |
| 0.9881 at 2 | 0.99269 at 2 | 0.9921 at 2 | 0.9916 at 2 | |
| Proposed 25.125 | 28.40 | 28.765 | 28.361 | |
| BSA/GA-25.554 | ||||
| 211 | 124.5 (40.99%) | 125.54 (40.46%) | 123.55 (41.40%) | |
| 143 | 88 | 87.25 | 84.47 |
| Parameters | Type-1 (2 DG) | Type-3 (1 DG) | ||||
|---|---|---|---|---|---|---|
| Proposed Method | BSA | GA | Proposed Method | BSA | GA | |
| 1.1155 at 11 | 1.126 + j0 at 13 | 1.139 + j0 at 13 | 1.991 at 9 + j1.60 at 33 | 1.858 + j1.493 at 8 | 1.802 + j1.152 at 2 | |
| 1.4882 at 29 | 0.730 + j0 at 31 | 0.0717 + j0 at 31 | ||||
| 0.9766 at 33 | 0.9631 at 33 | 0.9627 at 33 | 0.9825 at 33 | 0.9578 at 33 | 0.9541 at 33 | |
| 0.9986 at 2 | 0.9982 at 2 | 0.9982 at 2 | 1.00 at 9, 10, 11 | 1.0125 at 8 | 1.0045 at 8 | |
| 0.9129 at 31 | 0.8503 at 31 | 0.8497 at 31 | 0.9353 at 31 | 0.8417 at 33 | 0.8287 at 33 | |
| 0.9944 at 2 | 0.9927 at 2 | 0.9927 at 2 | 1.0 at 9, 10, 11 | 1.0269 at 9 | 0.9945 at 9 | |
| 29.293 | 29.284 | 29.291 | 30.085 | 30.276 | 29.798 | |
| 93.0 (55.92%) | 93.39 (55.71%) | 93.85 (55.49%) | 76.9 (63.55%) | 85.73 (59.34%) | 82.71 (60.77%) | |
| 65.0 | 63.41 | 63.72 | 58.6 | 66.08 | 61.51 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahesh, K.; Nallagownden, P.; Elamvazuthi, I. Advanced Pareto Front Non-Dominated Sorting Multi-Objective Particle Swarm Optimization for Optimal Placement and Sizing of Distributed Generation. Energies 2016, 9, 982. https://doi.org/10.3390/en9120982
Mahesh K, Nallagownden P, Elamvazuthi I. Advanced Pareto Front Non-Dominated Sorting Multi-Objective Particle Swarm Optimization for Optimal Placement and Sizing of Distributed Generation. Energies. 2016; 9(12):982. https://doi.org/10.3390/en9120982
Chicago/Turabian StyleMahesh, Kumar, Perumal Nallagownden, and Irraivan Elamvazuthi. 2016. "Advanced Pareto Front Non-Dominated Sorting Multi-Objective Particle Swarm Optimization for Optimal Placement and Sizing of Distributed Generation" Energies 9, no. 12: 982. https://doi.org/10.3390/en9120982
APA StyleMahesh, K., Nallagownden, P., & Elamvazuthi, I. (2016). Advanced Pareto Front Non-Dominated Sorting Multi-Objective Particle Swarm Optimization for Optimal Placement and Sizing of Distributed Generation. Energies, 9(12), 982. https://doi.org/10.3390/en9120982