1. Introduction
In an electric vehicle, the power battery State of Charge (SOC), an important parameter of the battery state, is used to directly reflect the remaining capacity of the battery and provide a basis for the formulation of an optimal energy management strategy for the vehicle control system. An inaccurate SOC will result in a reduced performance of the vehicle and lead to potential damage to the battery system; therefore, it is critical to develop algorithms that can accurately estimate the battery SOC in real time.
An accurate estimation of the
SOC is important to prolong the battery life and improve the performance of the electric vehicle [
1,
2]. However, because the battery is a strongly nonlinear and time-variable system, in practical applications it is hard to measure the
SOC directly due to its complicated electrochemical processes and the influence of various factors [
3]. At present, the most common methods of estimation [
4,
5,
6,
7,
8] can be roughly divided into two main categories.
One main category is based on the relationship between energy conservation and the physical properties of the battery. For example, the most commonly used methods in this category include the open circuit voltage method and the ampere-hour integral method, among others, in which the battery charge and discharge current or the open circuit voltage are used to calculate the residual capacity of the battery.
The open circuit voltage method, when used alone, can only be applied to an electric vehicle in a non-moving state. It cannot provide a real time dynamic estimation and is therefore usually used to provide a rough SOC initial value for other methods.
The ampere-hour integral method calculates the accumulated charge of the battery during charging or discharging and among other advantages, it is economical and easy to conduct. However, when it is applied in electric vehicles, the following main problems result: (1) the SOC initial value must be obtained by other methods; (2) a higher current measurement accuracy is needed, because the accuracy of the SOC estimation is largely determined by the current measurement accuracy; and (3) the accumulative errors cannot be eliminated, and as the charging or discharging time increase, the accumulative errors may get out of control.
Another main category of methods for SOC estimation is by first establishing a mathematical model of the battery, and then the battery SOC can be estimated indirectly based on the established model, the measured charge or the discharge current, and the terminal voltage. Common methods in this category include the neural network and the Kalman filter (KF) methods, among others.
The neural network method utilizes a complex nonlinear system, i.e., a neural network, which is composed of a large number of simple neurons with extensive connections. The neural network can automatically induce, organize and study the collected data to obtain the inner rules of these data. The neural network also has the ability to map a nonlinear system and thus can better reflect the dynamic characteristics of a battery. The disadvantage of the neural network method is that a large amount of data is needed for training, and the SOC estimation accuracy is greatly influenced by the training methods and the training data.
The main idea behind the Kalman filter method is to make an optimal estimation of the minimum mean square sense of the dynamic system states. This method has strong error correction ability and requires a highly accurate battery model. When the KF method is used to estimate the
SOC, the general mathematical form of the battery model can be expressed as:
where
uk is the input of the system, including the battery current, residual capacity, battery temperature, among other variables, and
yk is the output of the system, which usually indicates the terminal voltage of the battery. The most difficult challenge of the KF method is determining the state equation and the observation equation.
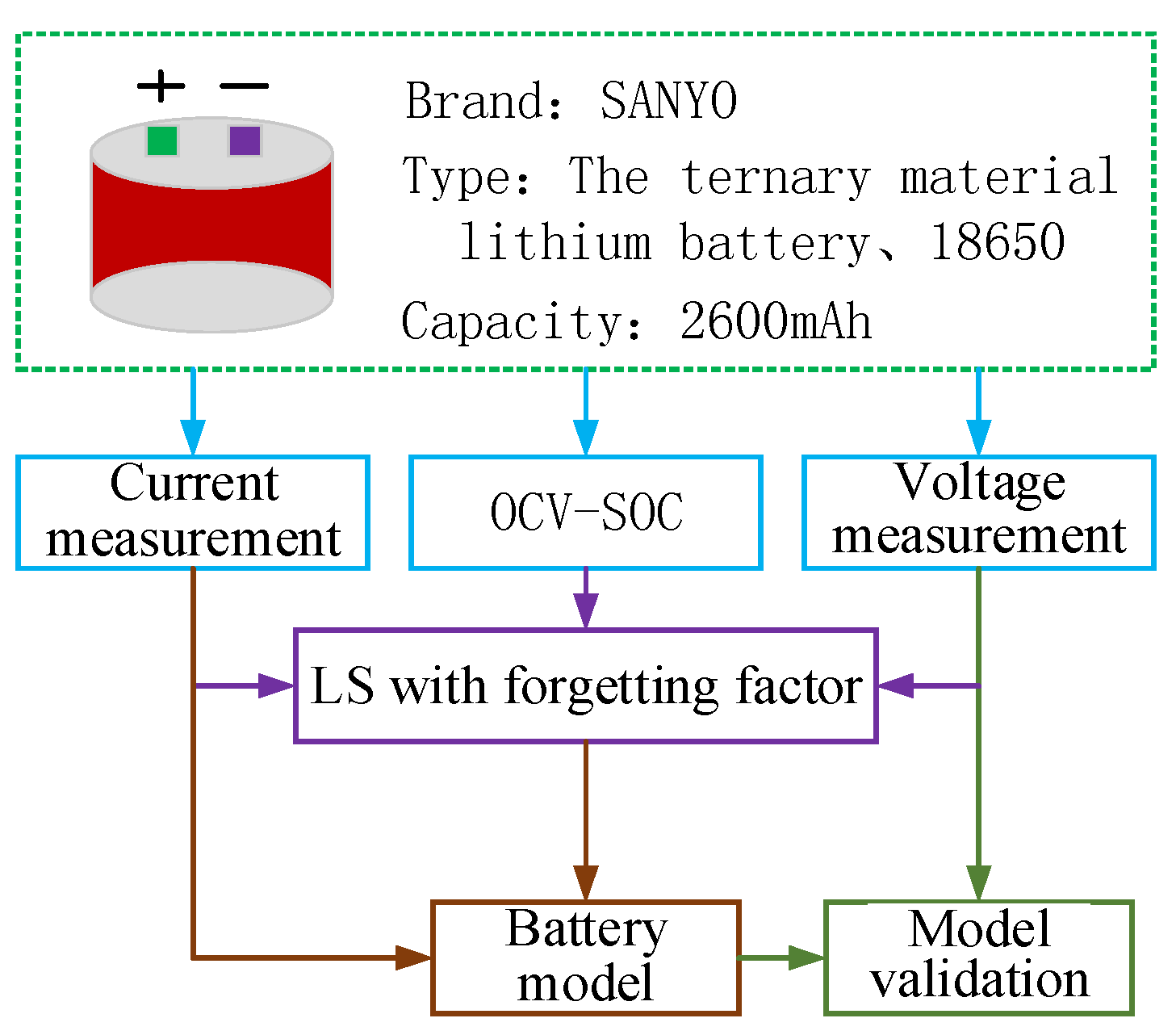
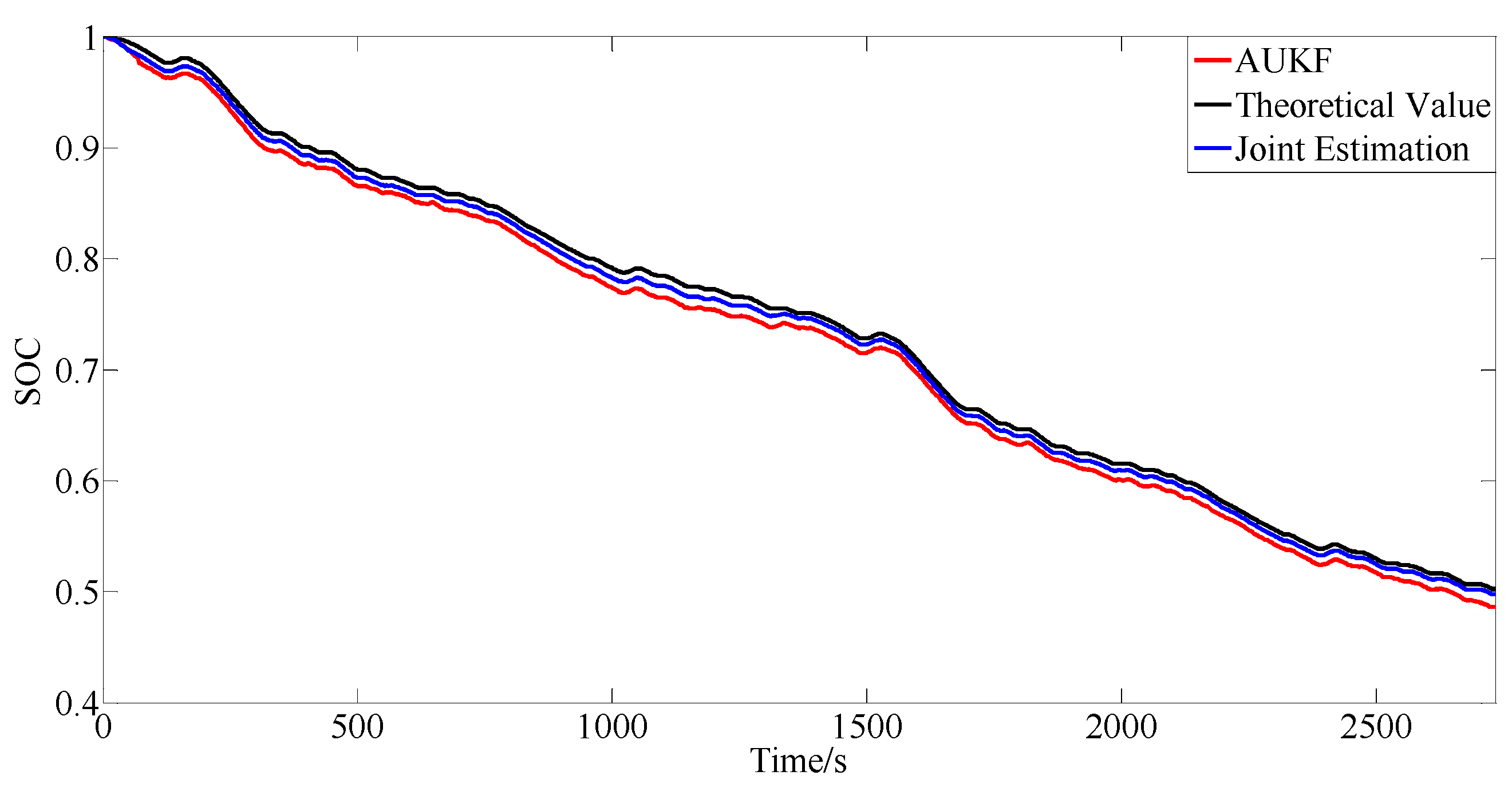
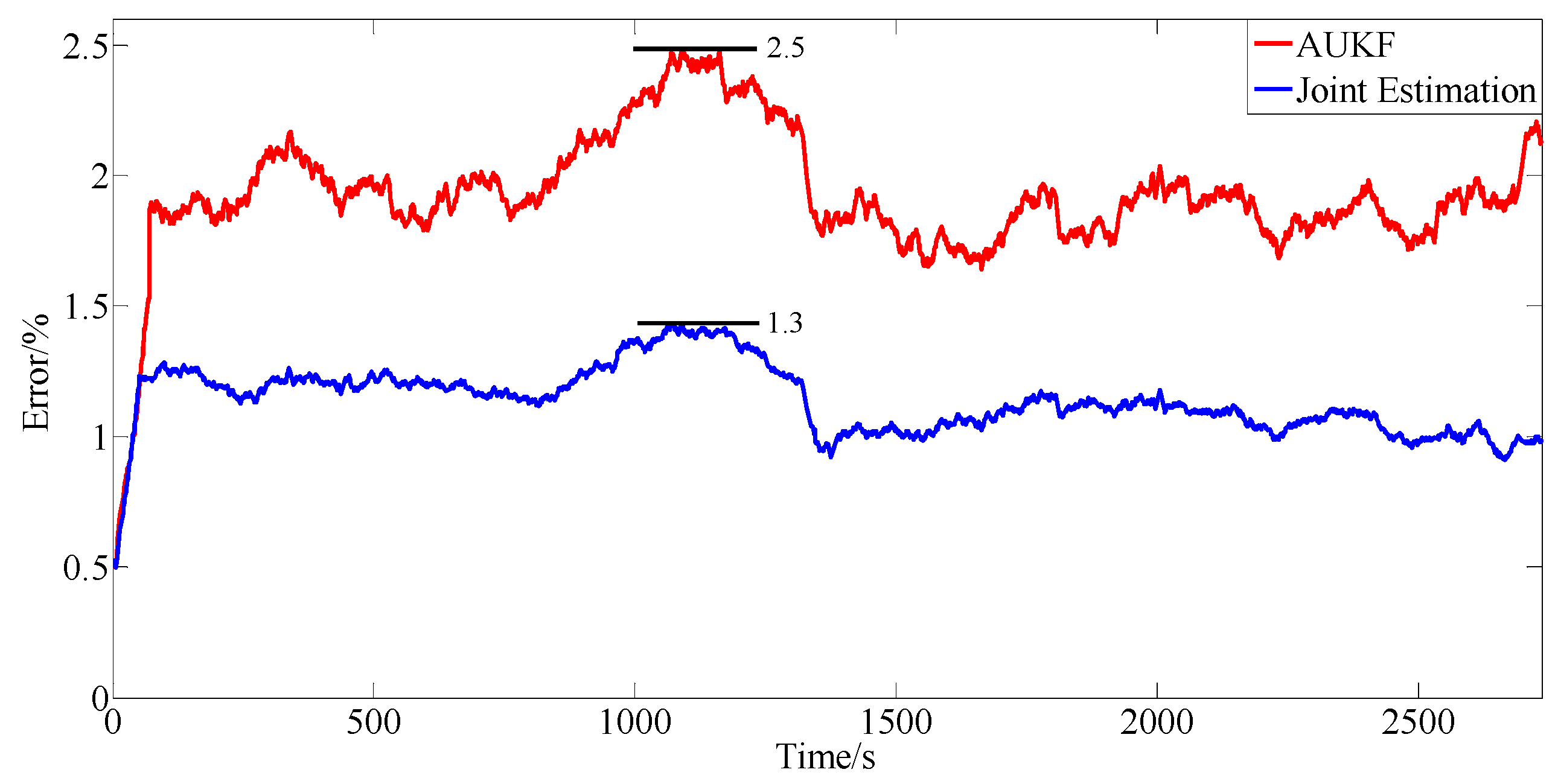
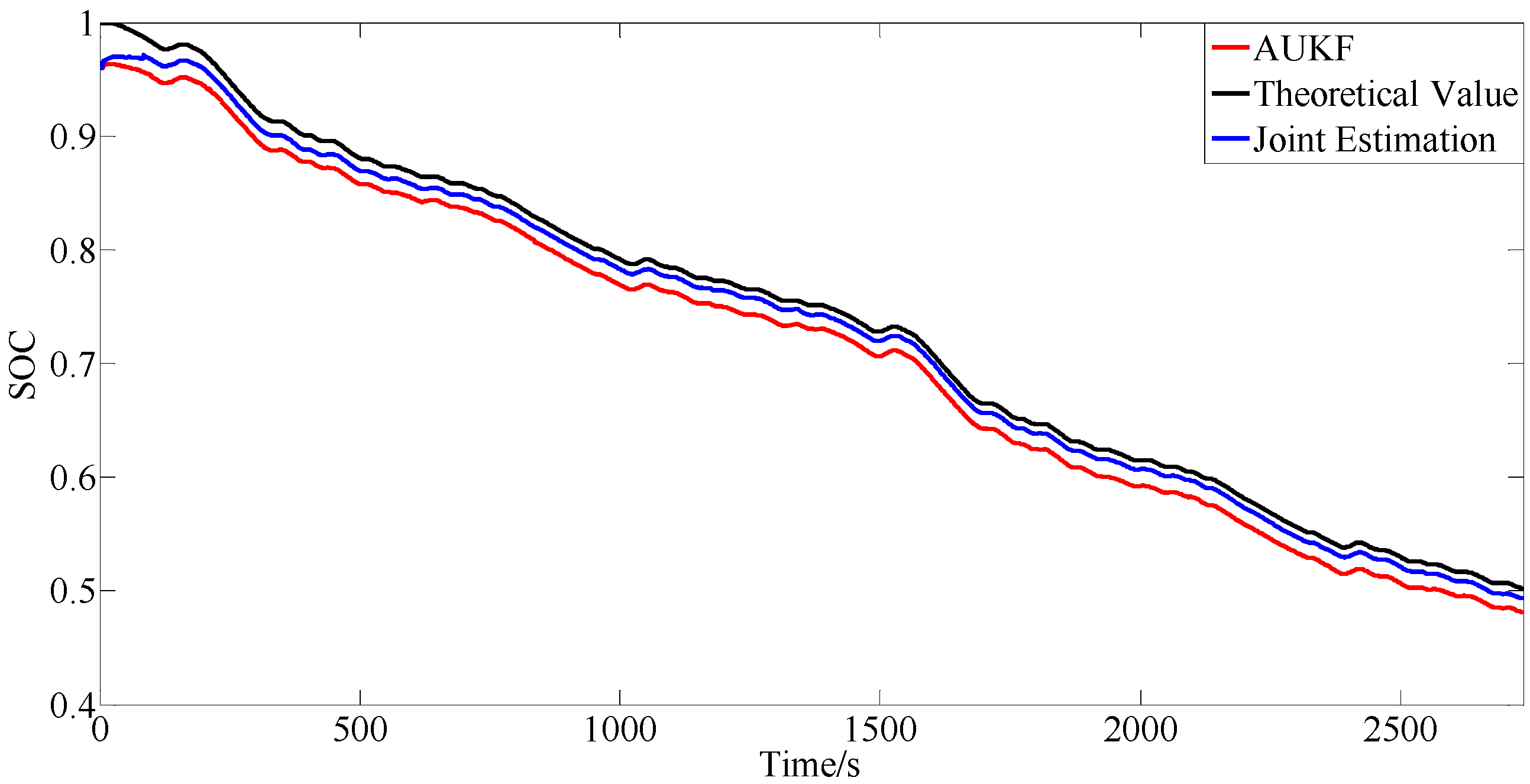
In this paper, using the second–order RC circuit as the equivalent model of the power battery, the online parameters of the circuit model are identified and the SOC is estimated based on the least squarea (LS) method with a forgetting factor and adaptive unscented Kalman filtering (AUKF). The comparison of these two algorithms is given, and a novel joint estimation algorithm of the power battery SOC based on the LS and the KF is proposed. The joint algorithm has the characteristics of a high estimation precision and good convergence to the initial value error. Furthermore, the advantages of the proposed algorithm are demonstrated by simulation experiments.
The structure of this paper is arranged as follows: in
Section 1, the most commonly used methods for
SOC estimation are introduced, and the proposed method of this paper is briefly described. In
Section 2, the proposed equivalent circuit structure is determined. Dynamic parameter identification and model verification of battery model are described in
Section 3. In
Section 4, the AUKF algorithm is presented. In
Section 5, using the LS with a forgetting factor and the AUKF algorithm to jointly estimate the power battery
SOC, the advantages of the proposed algorithm is demonstrated by simulation experiments. Finally, in
Section 6, the research results of this paper are summarized, and future research directions are provided.
2. Building the Battery Model
Generally, a good battery model provides an accurate description of the dynamic and static characteristics of the battery, has a relatively simple model structure making analysis and calculations easy and is not difficult to implement for a project. Currently, four main equivalent circuit models,
i.e., the Rint model, Thevenin model, PNGV model, and a multi-order
RC circuit model, are widely used in electric vehicle simulation [
9,
10,
11,
12,
13].
The first three models have simple structures but low precision performances. In the multi-order RC circuit model, as the model order increases, the model precision will increase. However, with increasing model order, the model will not be pragmatic due to its computational complexity.
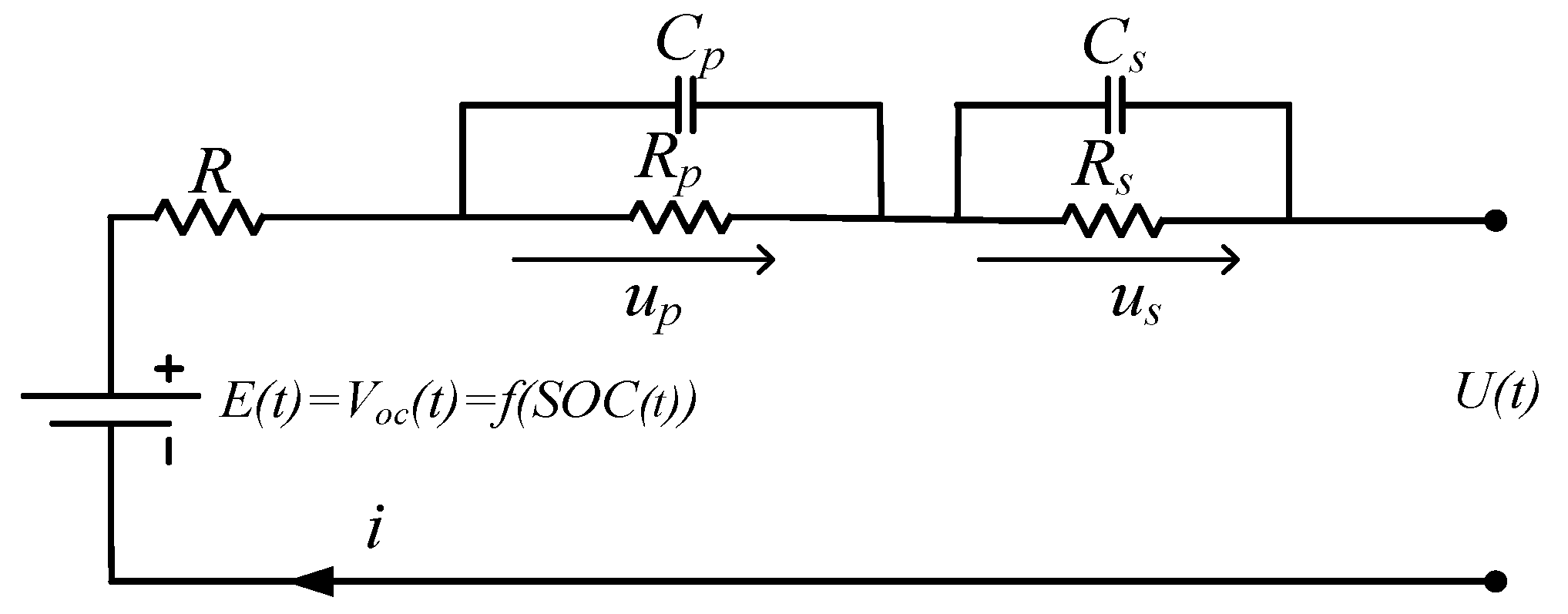
Thus, this article uses the second-order
RC equivalent circuit as the battery model, as shown in
Figure 1.
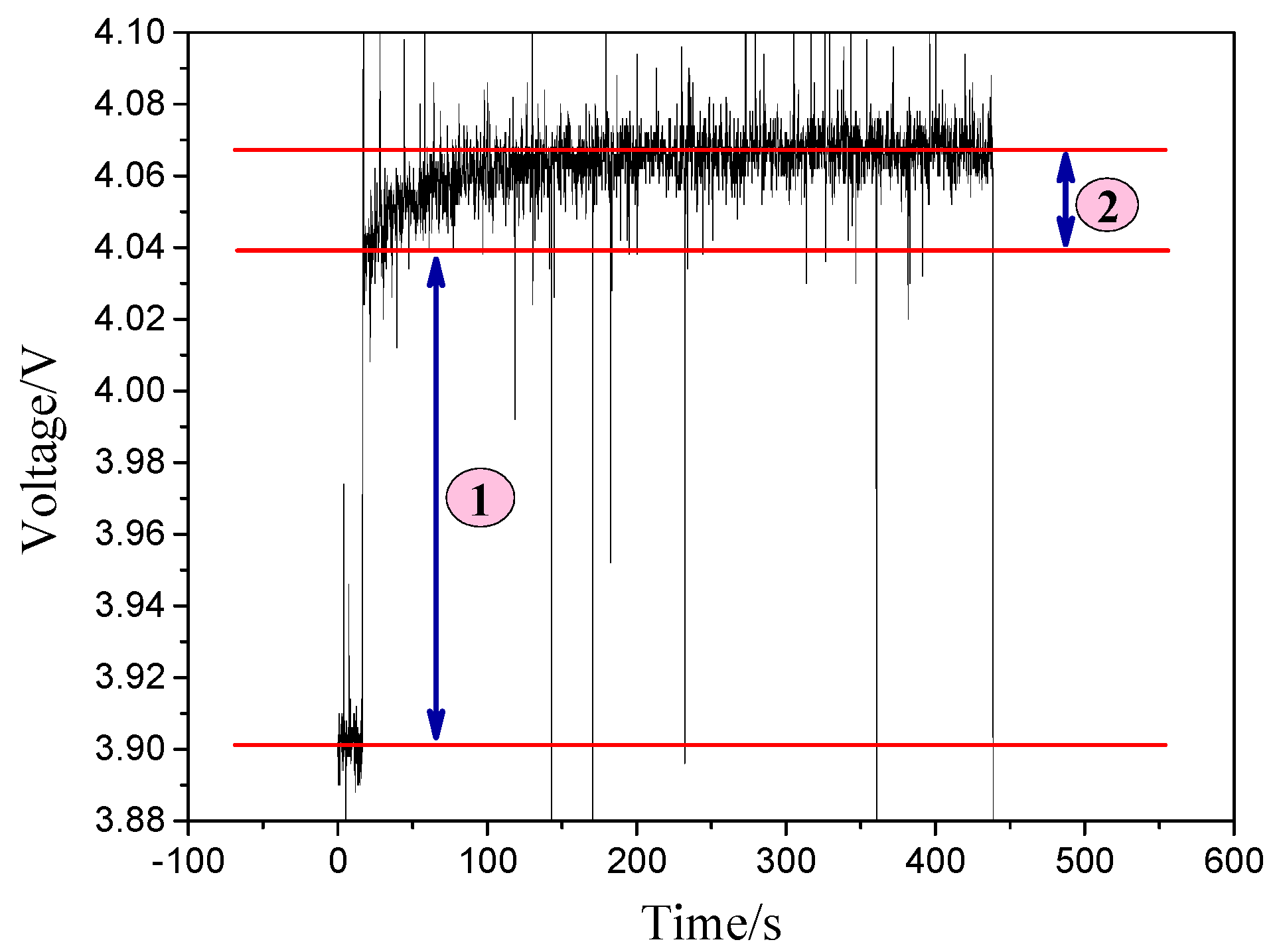
Figure 2 shows the terminal voltage response of a 2.6 Ah Sanyo ternary lithium battery after completing a discharge cycle.
Figure 1.
The second-order RC equivalent circuit.
Figure 1.
The second-order RC equivalent circuit.
Figure 2.
The terminal voltage response after the completing a discharge cycle.
Figure 2.
The terminal voltage response after the completing a discharge cycle.
This model includes three parts:
Voltage source: Using the open circuit voltage Voc as the power battery electromotive force, this work neglects the temperature and SOH influences on the open circuit voltage (OCV) and only studies the relationship between Voc and the battery SOC at a constant temperature (25 °C) and constant SOH (i.e., a new battery).
Ohmic resistance: The battery’s resistance consists of electrode materials, electrolytes and other resistors. The change in voltage in region ① in
Figure 2 is due to the influence of the ohmic resistance
R.
RC loop circuit: Two links of a resistor and a capacitor superpose to simulate battery polarization [
14], which is used to simulate the process voltage stabilization after discharge. The region ② of
Figure 2 shows the change in voltage influenced by the
RC loop circuit.
Equation (3) shows the function relation of the equivalent circuit model in
Figure 1:
We can then discretize Equation (3) and solve the state equation as follows:
where:
3. Identification and Verification of Dynamic Parameters of the Battery Model
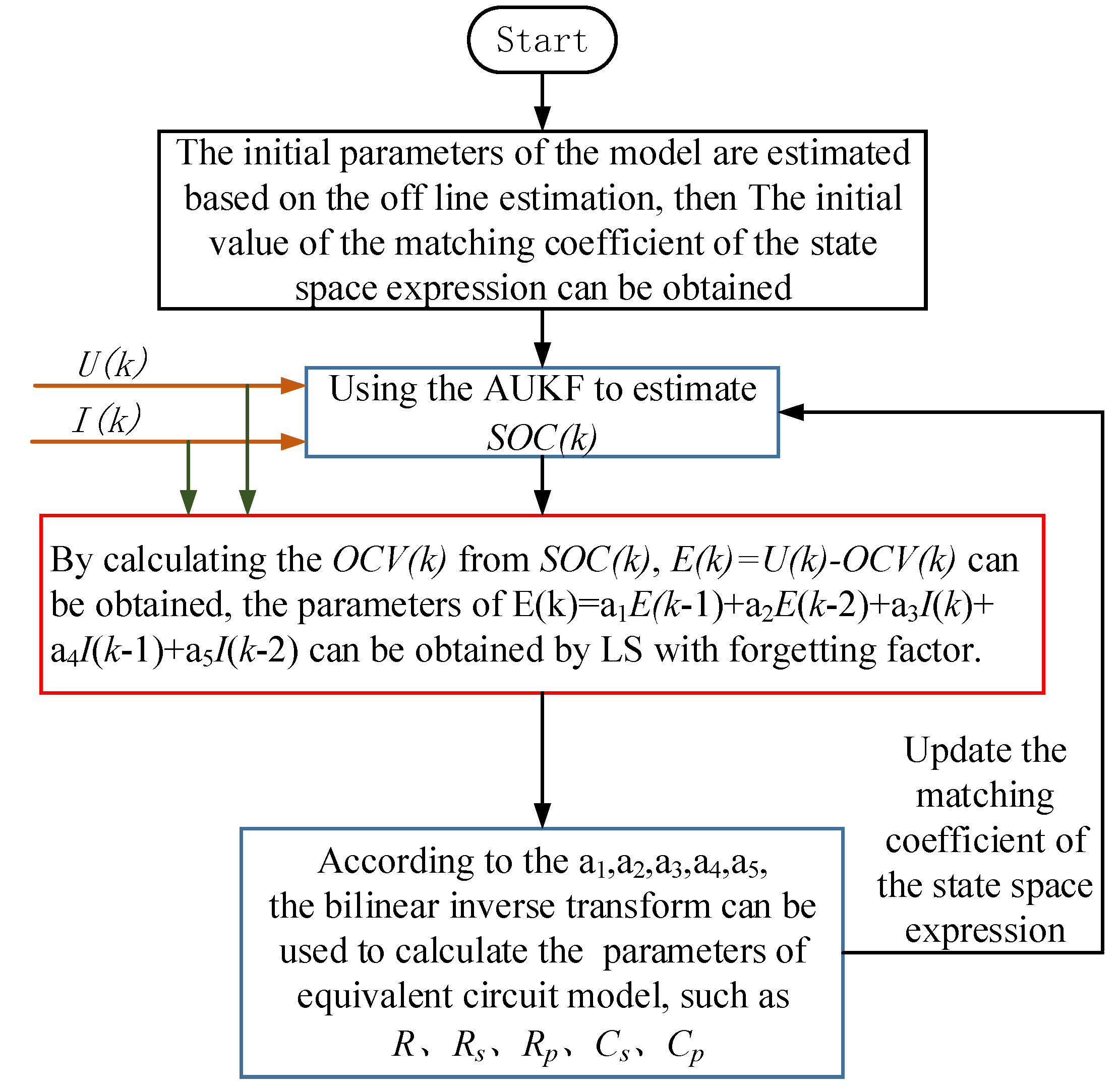
Figure 3 shows the flow chart for identifying the dynamic parameters and verifying the model. According to
Figure 3, based on the LS with a forgetting factor, the dynamic parameters of an actual battery is identified and the established model is verified, in combination with the corresponding relation of the battery
OCV and the
SOC.
Figure 3.
Parameter identification flow chart.
Figure 3.
Parameter identification flow chart.
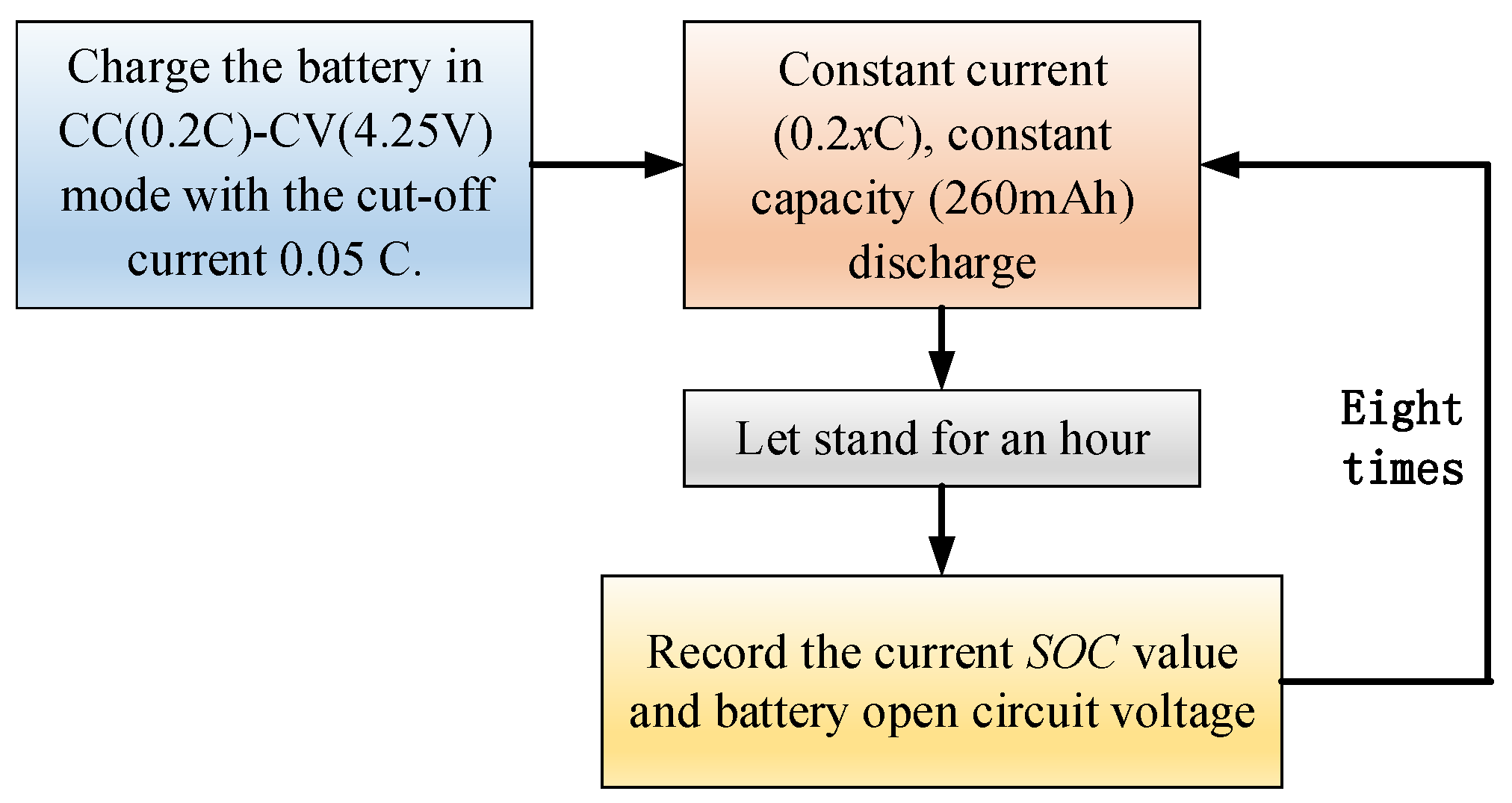
3.1. OCV-SOC Calibration Experiment
In this paper, the discharge experiment, conducted at a constant temperature (25 °C) under intermittent discharge conditions with constant current and capacity, calibrates the
OCV-
SOC curve with 0.2
C, 0.3
C, 0.4
C, 0.5
C, 0.6
C, 0.75
C, and 1
C.
Figure 4 shows the calibration steps of the battery.
Figure 4.
Calibration steps of the OCV-SOC.
Figure 4.
Calibration steps of the OCV-SOC.
The corresponding relationships between
OCV and
SOC were recorded for
x = 2, 3, 4, 5, 6, 7.5, 10, respectively.
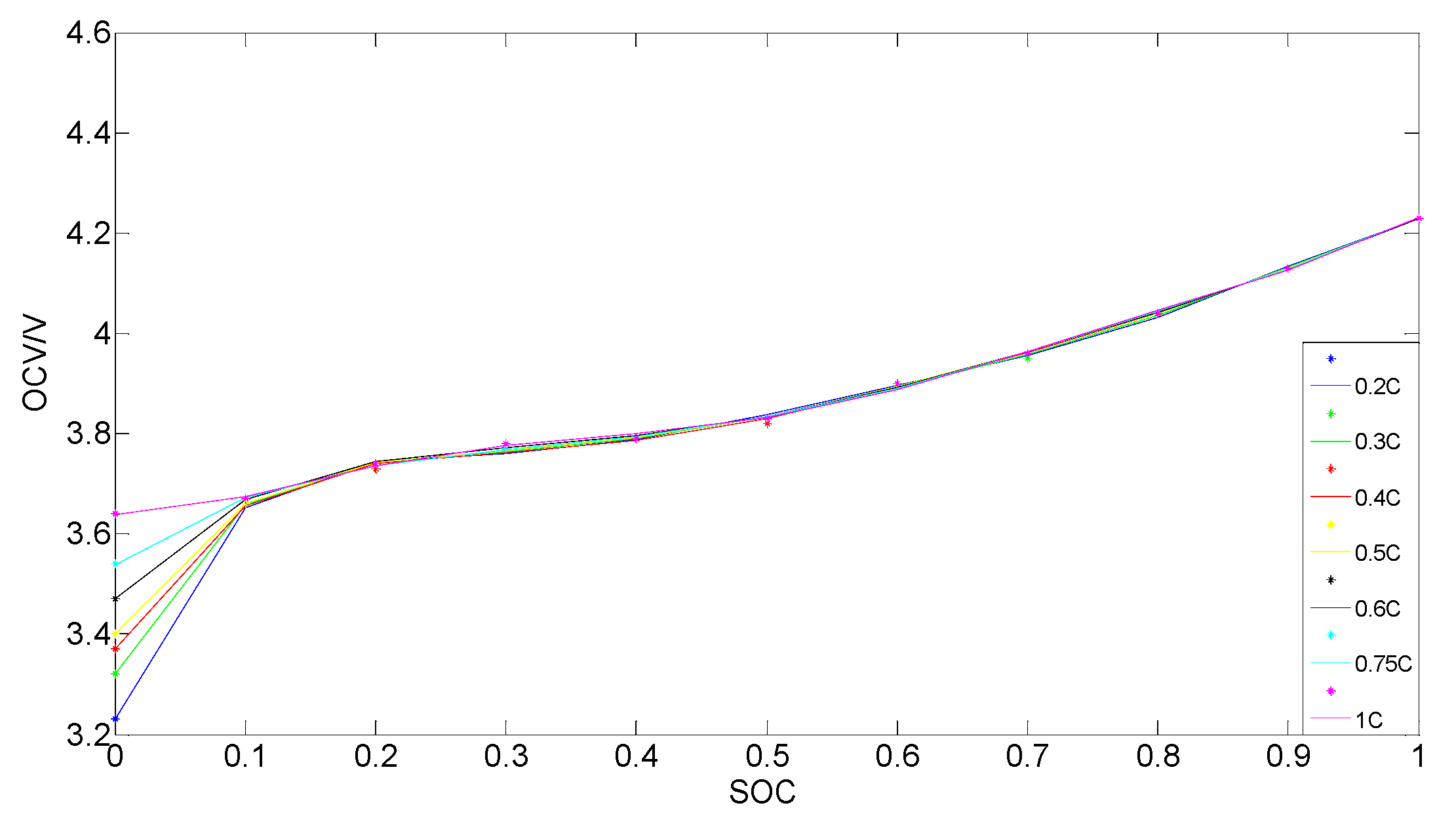
Figure 5 shows the different
OCV-SOC relationships with sixth order polynomial fittings.
Figure 5.
Different OCV-SOC relationships with sixth order polynomial fittings.
Figure 5.
Different OCV-SOC relationships with sixth order polynomial fittings.
From
Figure 5, when the
SOC is above 10%, all the relationships seem to be superposed. This indicates that at the same temperature and the same
SOH, any of the curves can be chosen to represent the
OCV-SOC relationship. However, a smaller current leads to a smaller change of the battery characteristics. The 0.2
C constant current intermittent discharging
OCV-SOC relationship is selected as the reference curve, and the open circuit voltage of the battery as a function of
SOC can be represented by Equation (7):
where
a1 to
a7 are coefficients obtained by the sixth order polynomial fitting giving
b1 = −34.72,
b2 =
120.7,
b3 = −165.9,
b4 = 114.5,
b5 = −40.9,
b6 = 7.31, and
b7 = 3.231.
3.2. Application of LS with a Forgetting Factor
From Formulas (4) and (5), the Laplace equation for the battery model can be deduced:
Therefore:
where
is the time constant of
Rs, Cs, and
is the time constant of
Rp, Cp.
Using bilinear transform to discretize Equation (9),
is obtained, and the discrete transfer function is as follows:
where
a1,
a2,
a3,
a4,
a5 are the corresponding constant coefficients. Formula (9) can then be converted to a differential equation:
where
I(
k) and
y(
k) indicate the system input and output, respectively, and subsequently gives:
If we assume the
k moment sensor sampling error is
e(
k), then:
and expanding
to
N-dimensional, where
k = 1, 2, 3…
N+
n, n = 2, the following equation is deduced:
Next, taking the criterion Equation
:
and considering the least squares method is to take the
minimum:
which gives:
The above equations constitute a one-time least square calculation. However, for the actual system, a one-time calculation does not give an estimated value close to the true value. Thus, a recursive least square method is introduced:
where
is the system-estimated reference value of the previous cycle,
is the observed value of this cycle,
is the actual observed value of the system,
is the prediction error, and
is the corrected prediction value. To obtain the optimal estimation of the present cycle,
and
must be first provided to meet the requirements,
is then obtained, and the least square method is executed. Generally,
can be any value, and
, where
is a positive real number, and
is a unit matrix.
The recursive least squares method has an unlimited memory,
i.e., as the length
K increases, the older data accumulates, making new data difficult to substitute into the least-square steps. This will subsequently affect parameter estimation, especially in time-varying systems. Because a large amount of accumulated old data creates an imbalance with the new data, the newly estimated parameters cannot accurately reflect the characteristics of the system at a current moment. Thus, to avoid the above situation [
15], a forgetting factor
, where
, is introduced:
Thus, even when ) is large, ) does not go to 0, and “data saturation” can be eliminated.
The steps of the least square algorithm with the forgetting factor are as follows:
In Equation (19), the most common least squares. When is smaller, the tracking ability is stronger, but the volatility is greater; hence, generally 0.95 < < 1.
3.3. Dynamic Parameter Identification
Parameter identification is based on the information of the measurement system and provides guidelines to estimate the model structure and unknown parameters. According to the value of
derived from the previous algorithm:
Substituting this into Equation (10):
Because the corresponding coefficients of Equations (9) and (21) are equal, we can obtain:
The coefficients on the right-hand side of Equation (22) can be obtained by a recursive algorithm, and the variables on the left-hand side are the unknown parameters of the battery model. This completes the process of parameter identification.
In the process of identifying model parameters, the known variables are
V(
k),
I(
k),
V(
k−1),
I(
k−1),
SOC(
k−1) and
V(
k−2),
I(
k−2), and the unknown variable is
. The steps of using the LS method with a forgetting factor for the identification of dynamic parameters of the battery are as follows:
Identification initialization using sampling time T = 1s, and SOC (0) = 90%.
Calculate each time and obtain the input and output of the identification process accurately.
Initialize , and the forgetting factor , and start the forgetting factor least square parameter identification; in this paper, .
Using this process, the value of can be obtained, and then according to Equation (22), R, Rs, Rp, Cs, and Cp can consequently be obtained; hence, the dynamic real-time update of the battery model parameters is realized, along with an accurate description of the dynamic response of the battery. Furthermore, the accuracy of the battery model is improved, and the basis for estimating the battery SOC accurately is provided in latter sections.
3.4. Model Verification
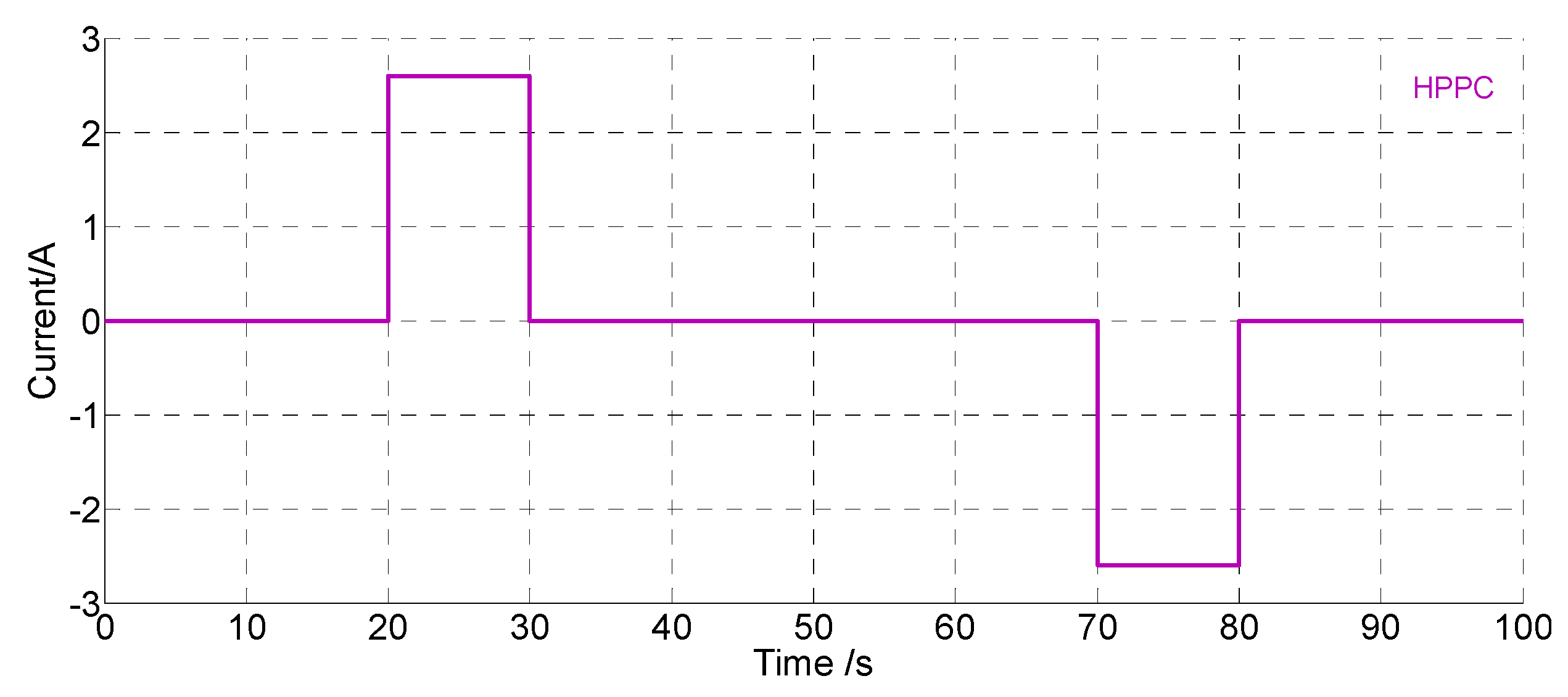
After the dynamic parameters of the battery model are determined, the next step is to verify the accuracy of the model using Hybrid Pulse Power Characterization (HPPC) [
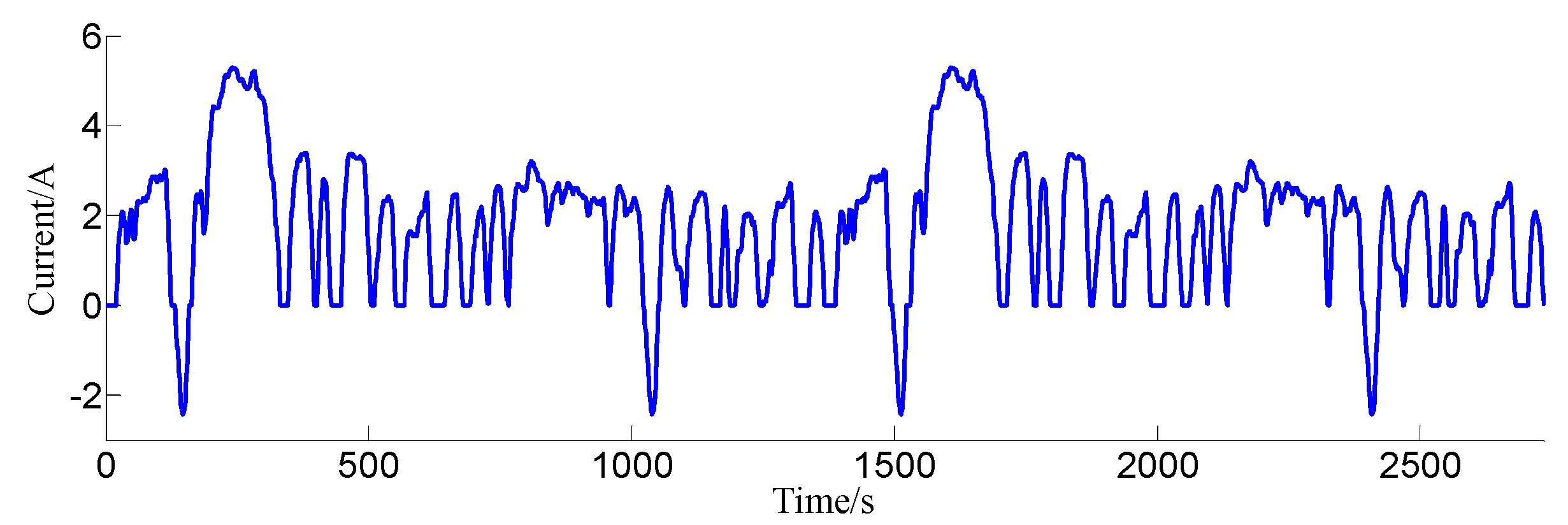
16]. Here, the initial
SOC is set to 0.5, and the input current waveform is shown in
Figure 6 with a pulse current size of 1 C (2.6 A).
Figure 6.
HPPC pulse current.
Figure 6.
HPPC pulse current.
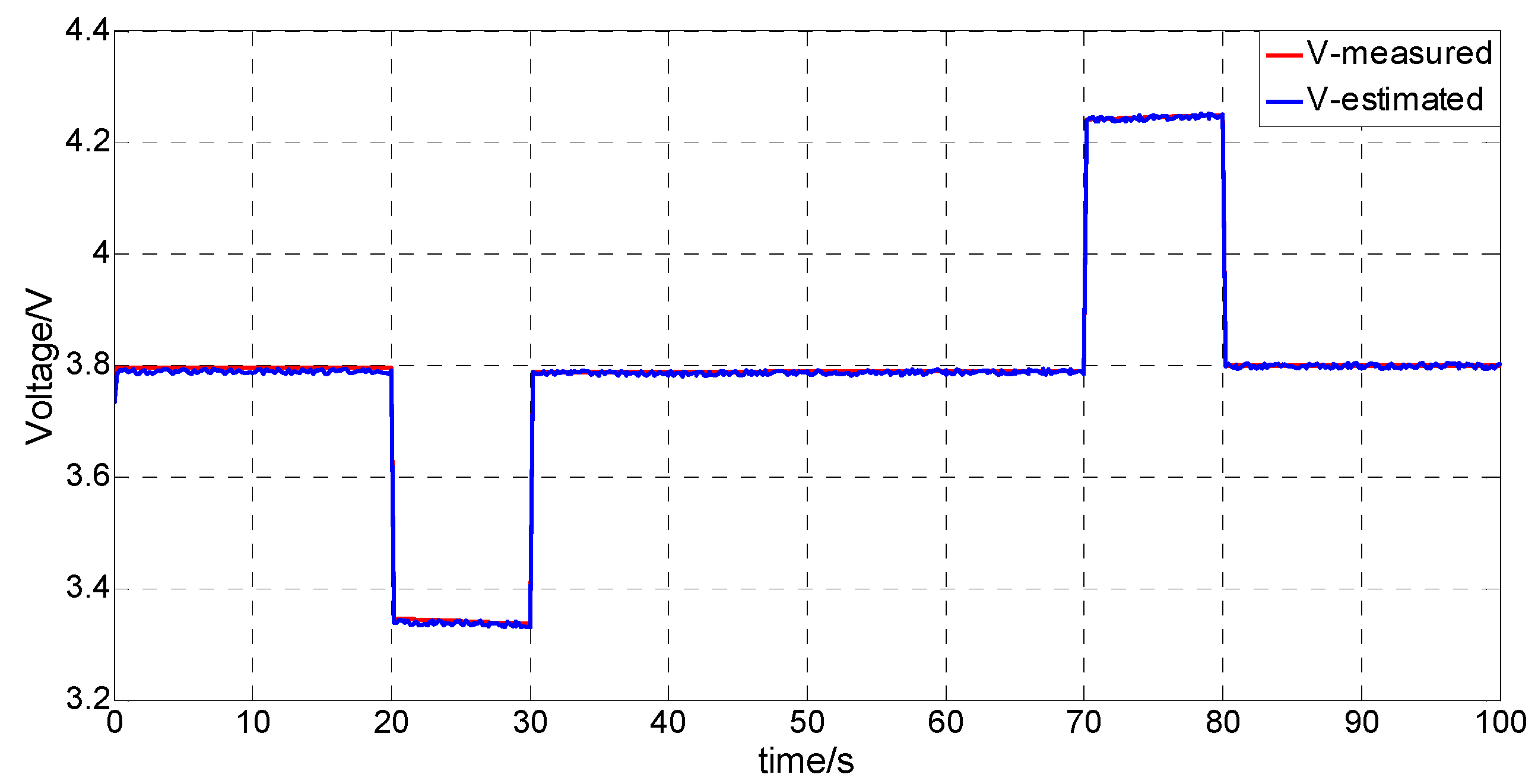
A comparison of voltage responses is shown in
Figure 7, and
Figure 8 depicts the voltage error,
i.e., the differences between the measured and estimated voltages.
Figure 7.
Comparison of voltage responses.
Figure 7.
Comparison of voltage responses.
Figure 8.
Differences between measured and estimated voltages.
Figure 8.
Differences between measured and estimated voltages.
Figure 7 and
Figure 8 show that when the current suddenly changes, the model estimated voltage can track the actual voltage well, and the error remains at approximately 0.01 V. Hence, this model can be used to verify the algorithms of the
SOC estimation in this paper.
4. Establishment of the AUKF Algorithm
The main idea of the Kalman filter is to make an optimal estimation of the minimum mean square value, which includes the following two stages: prediction and updating. In the prediction stage, the filter makes an estimate of the current state according to the value of the last state. In the updating stage, according to the observed value of the current state, the filter optimizes the predicted value from the prediction stage to obtain a more accurate estimation of the current state.
It is important to note that the Kalman filter is mainly used in linear systems, while a battery system reflects complex nonlinear characteristics. Some people [
4,
7,
8] have used the extended Kalman filter (EKF) for
SOC estimation, and while some good results have been achieved, linearization errors are inevitable, and the Jacobian matrix is also difficult to estimate. In recent years, a new nonlinear filtering method has emerged, collectively referred to as the sigma point Kalman filter, including the unscented Kalman filter (UKF). UKF does not require Taylor approximations of nonlinear equations; instead, the nonlinear unscented transform (UT) technique is used directly, and thus the mean and the variance of the nonlinear system states can be mapped directly to achieve a higher estimation accuracy.
In a normal UKF algorithm [
17,
18], the covariance is a constant and cannot satisfy the real-time dynamic characteristics of the noise, which has a certain impact on the accuracy. In this paper, to eliminate this effect, the normal UKF algorithm is improved by updating the covariance in real-time and thus improving the accuracy of the UKF. This type of algorithm is called the adaptive unscented Kalman filter (AUKF) algorithm. The establishment process of the algorithm is described as follows.
A discrete-time controlled system is governed by the equation of state and the observation equations are shown in Equation (23):
where the random variables
wk and
vk represent the process and measurement noise, respectively. As for the UKF, the iteration equation is based on a certain set of sample points, which is chosen to make their mean value and variance consistent with the mean value and variance of the state variables. Then, these points will recycle the equation of the discrete-time process model to produce a set of predicted points. After that, the mean value and the variance of the predicted points will be calculated to modify the results, and the mean value and the variance will be estimated. Before the UKF recursion, the state variables must be modified in a superposition of the process noise and the measurement noise of the original states. The
SOC of the Li-ion battery pack can be calculated using the ampere-hour integral method:
In Equation (24), , where ki is the compensation coefficient of charge and discharge rate, kt is the temperature compensation coefficient, and kc is the compensation coefficient of cycles. CN is the actual available battery capacity.
The Li-ion battery equation of state can be obtained from Equations (4) and (24):
For the circuit model shown in the Equations (25) and (26):
To facilitate the distinction, we can take as the initial state of the system, yk as the raw output (its corresponding symbol is Uk in the circuit model of the Li-ion battery), uk as the control variable (its corresponding symbol is Ik), and make . The operations of an ordinary UKF are as follows.
First, select (2
L + 1) sampling points, and make Sample=
,
=0, 1, 2,
, where
is the selected points and
is the corresponding weighting value. Then, select the points in the following manner:
The corresponding weighting values are:
where
,
is the corresponding weighting value of the mean,
is the corresponding weighting value of the variance, and
denotes the column
i of the square-rooting matrix
. To ensure that the covariance matrix is definitely positive, we must take
;
controls the distance of the selected points, with
, and
is used to reduce the error of the higher-order terms. For a Gaussian, the optimal choice is
in this paper, along with
and
.
consists of
and
.
The time updates of the iterative process are as follows:
The gain matrix of the filter is:
The estimates of the states and the mean square error are as follows:
where
yk is the actual measured value of the system output. As the process noise and measurement noise are real-time and to make the covariance of the process noise and measurement noise update in real time, the following is needed:
where
is the residual error of the system measured output and
is the residual error of the system measured output estimated by the sigma points.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





