
Numerical Investigation of a Tuned Heave Plate Energy-Harvesting System of a Semi-Submersible Platform


Abstract
:1. Introduction
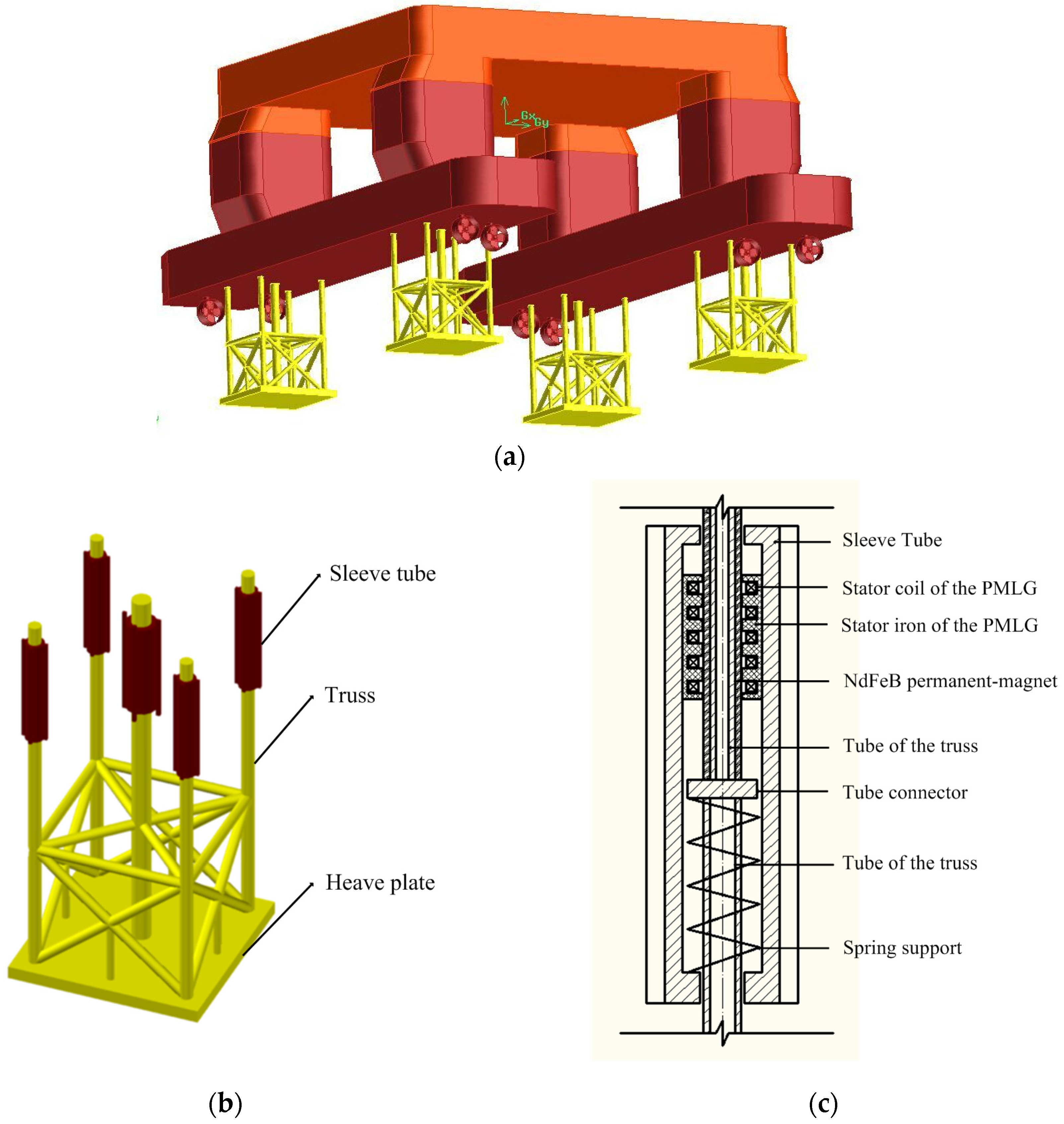
2. Conceptual Design of the Tuned Heave Plate Energy Harvesting System


3. Numerical Model of the Semi-Submersible with the THPEH System
3.1. The State-Space Model for Radiation Damping Force Calculation
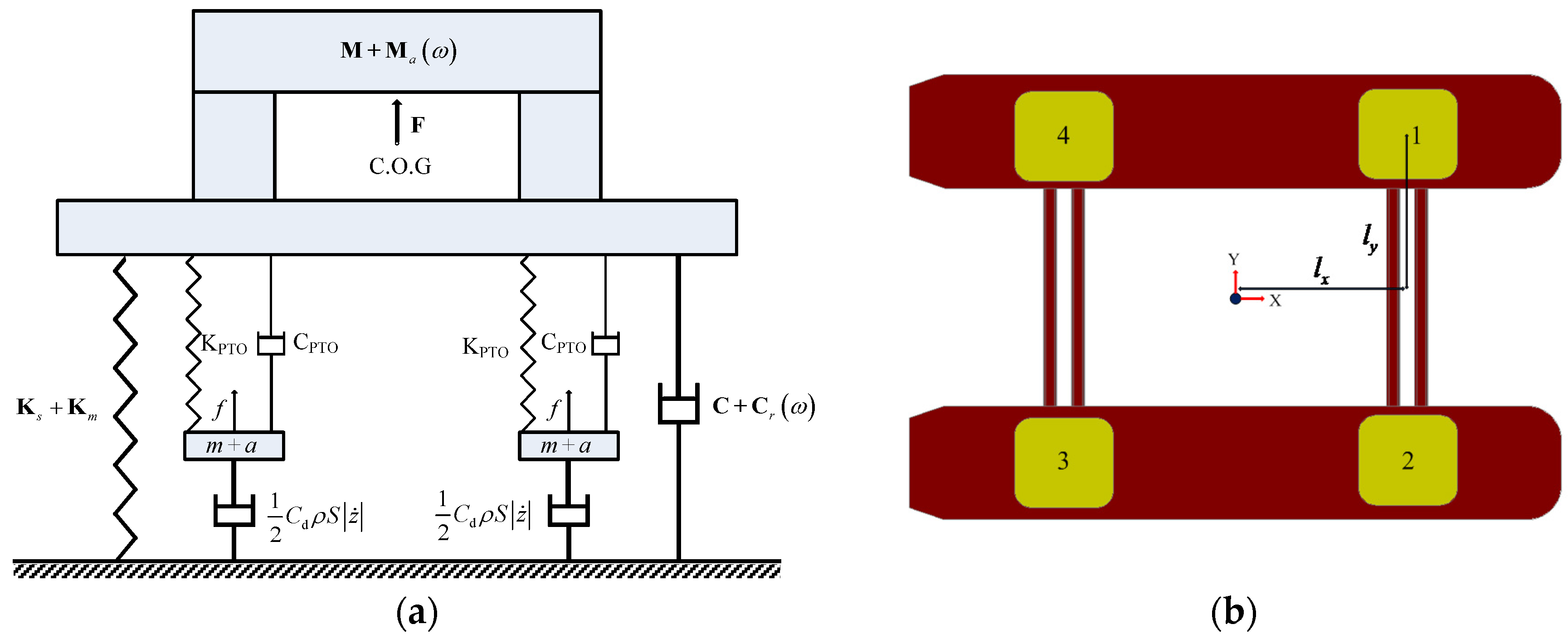
3.2. The State-Space Model for the Platform with the THPEH System
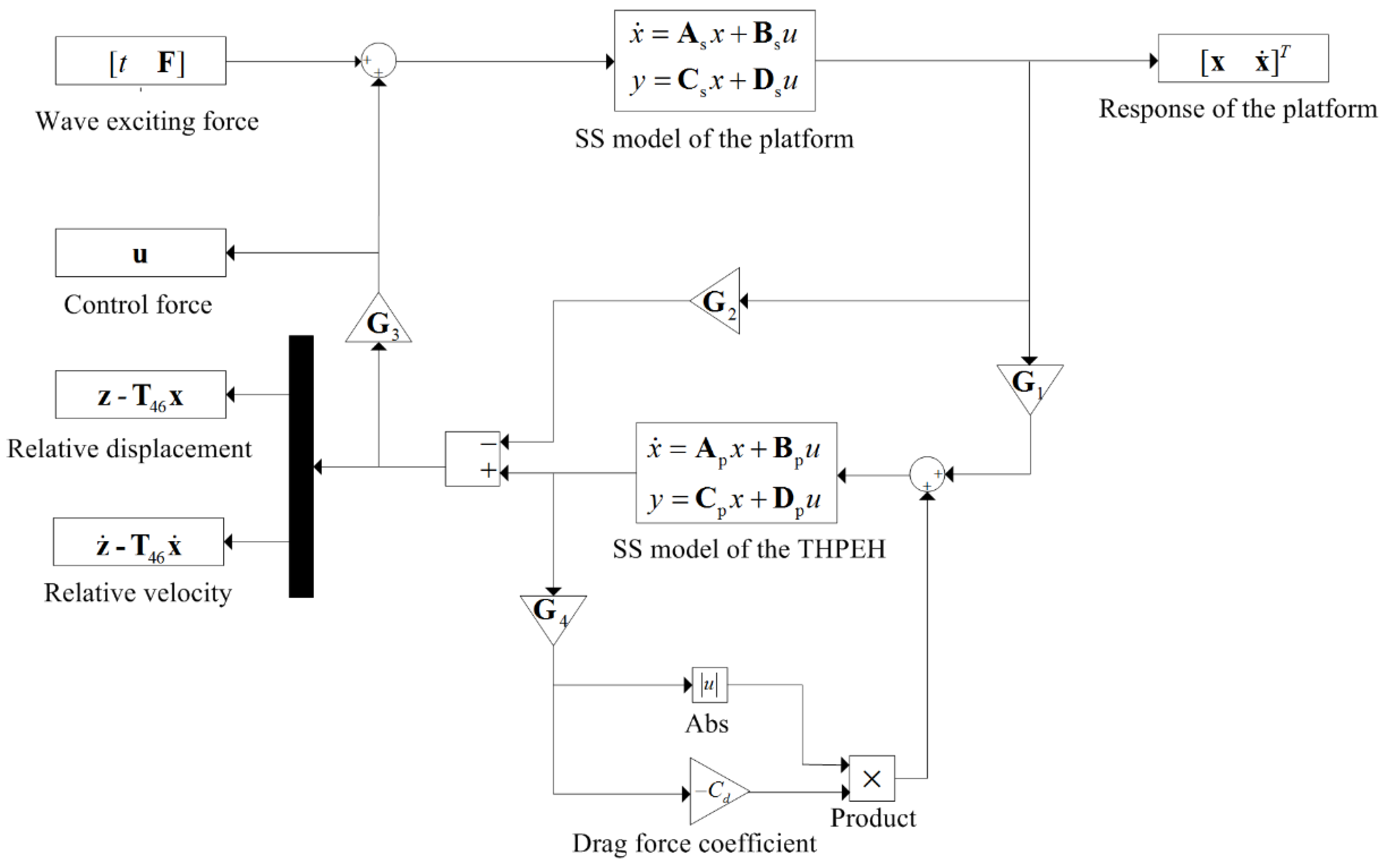
3.3. The Simulink Model for the Platform with the THPEH System

4. Wave Tank Tests for Semi-Platform Numerical Model Modification and Validation
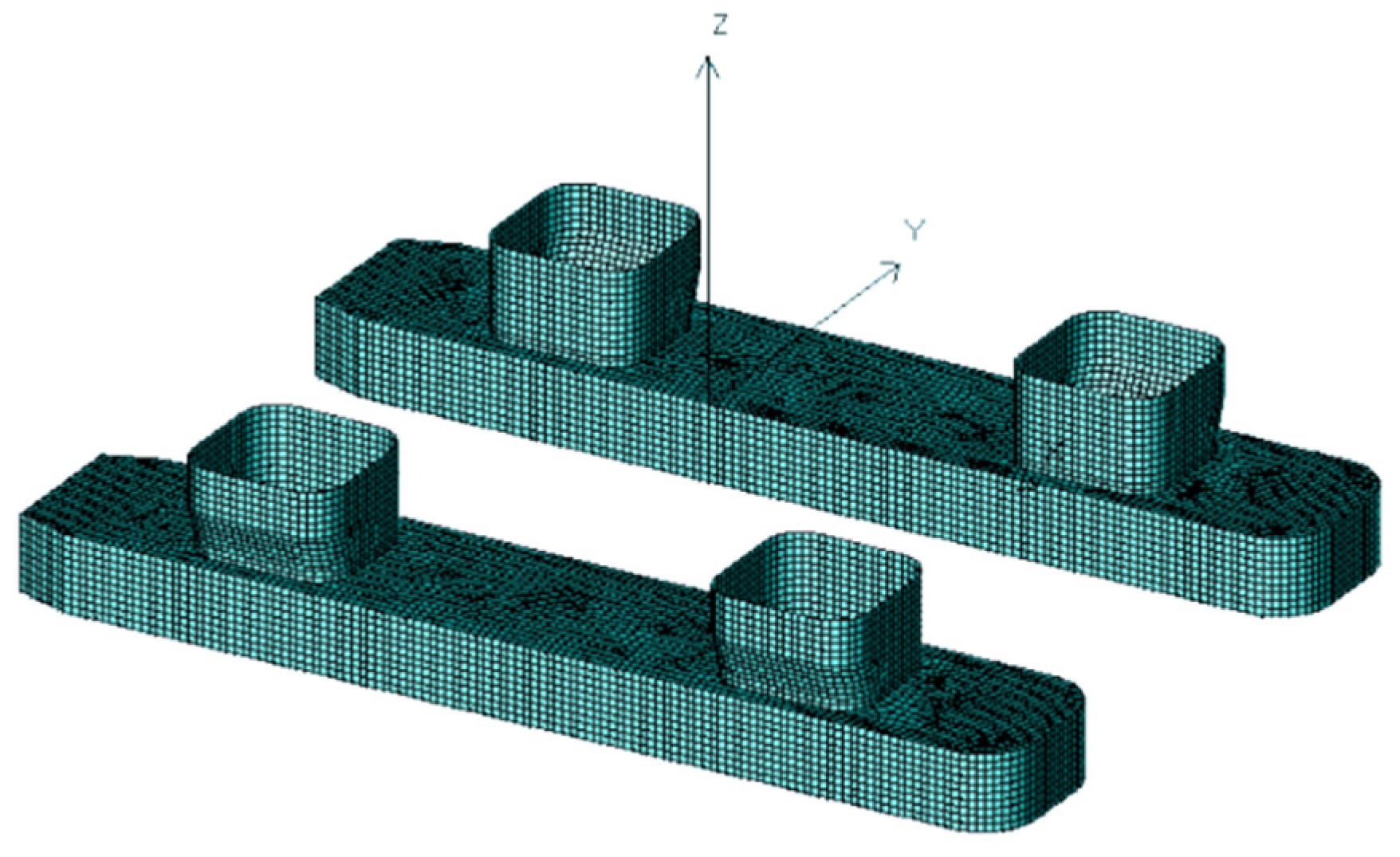
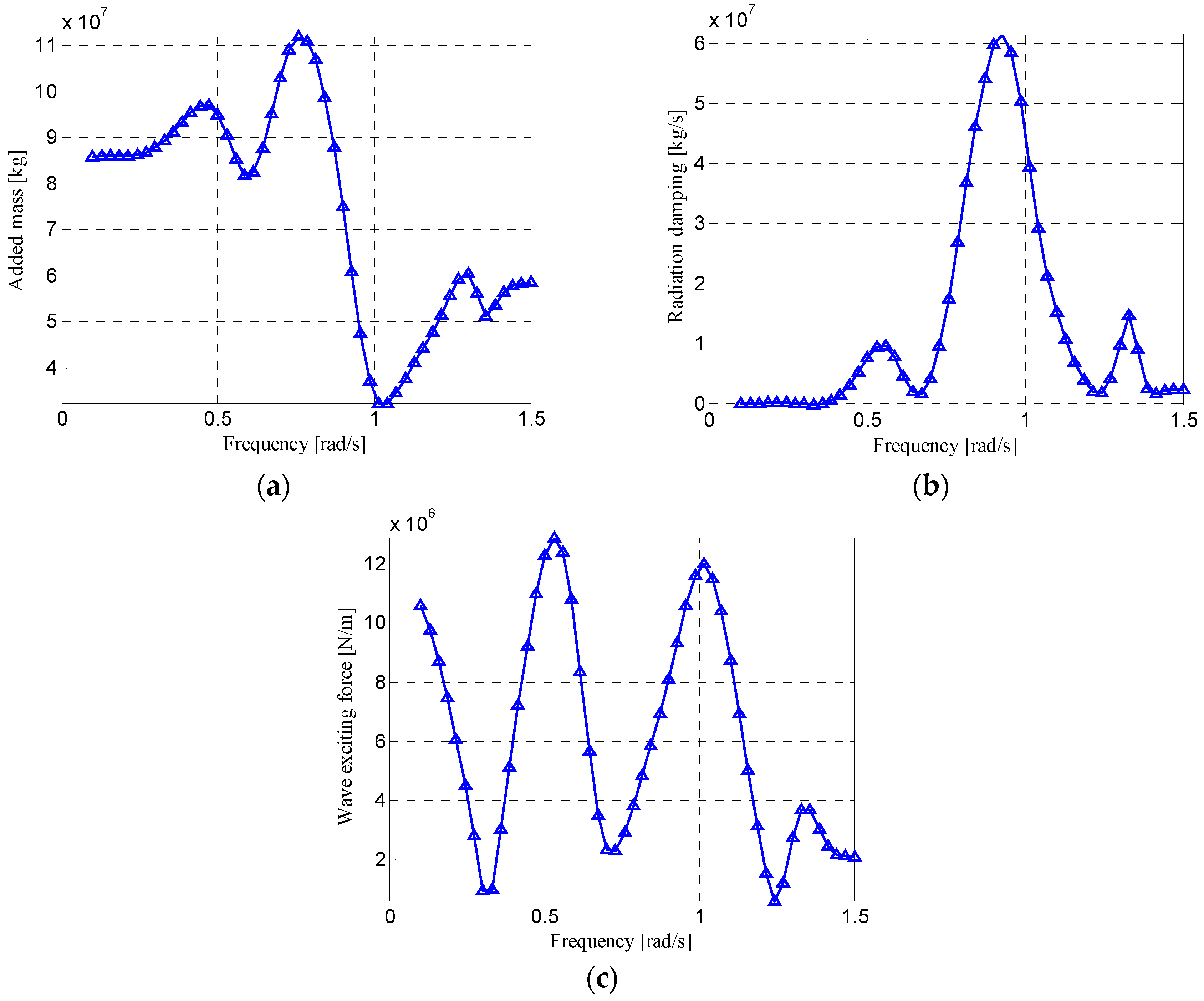
4.1. Hydrodynamic Analysis of the Platform


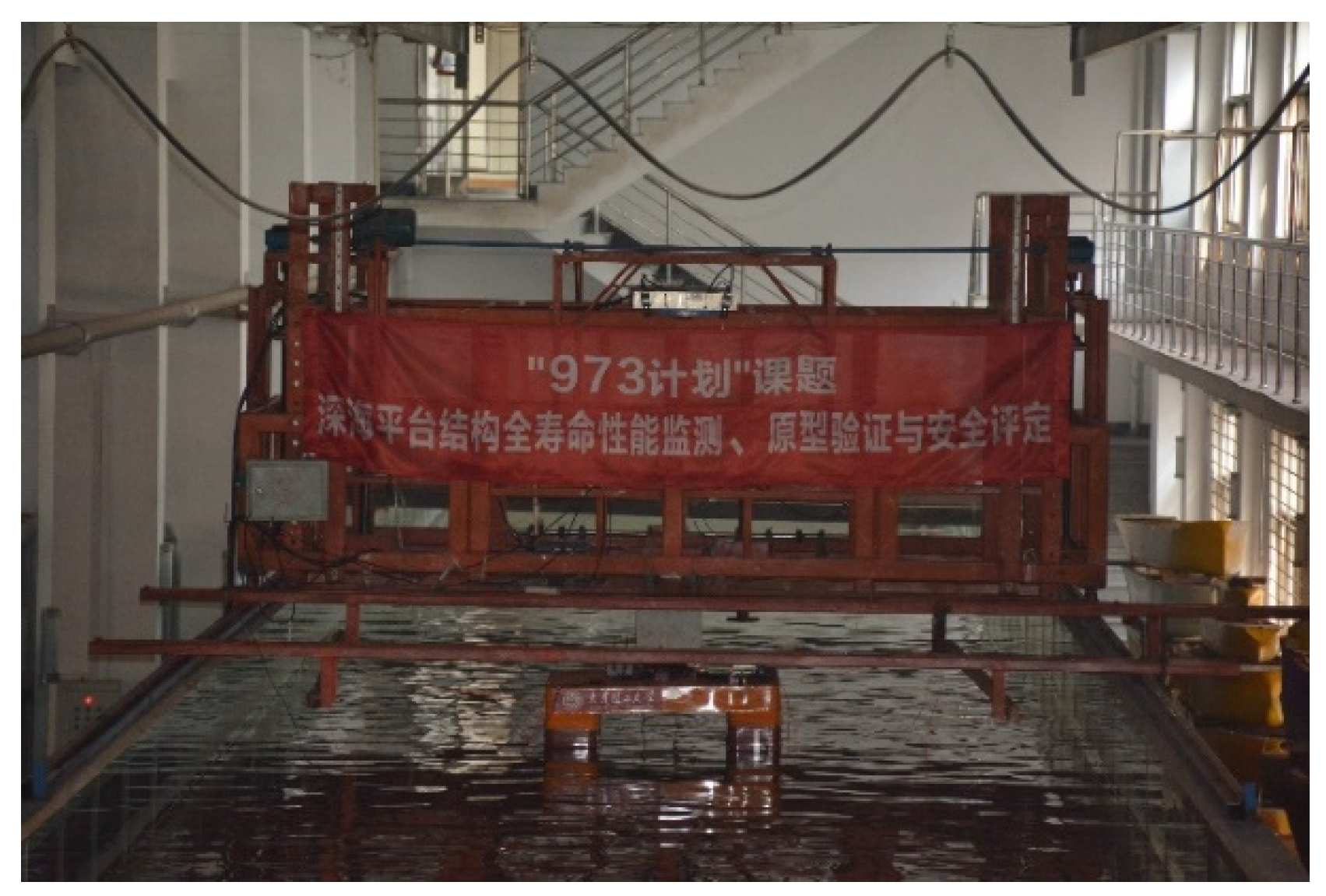
4.2. Introduction of the Experiment Setup

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| Prototype | Model | |
| Deck (mm) | 77470 × 74380 × 8600 | 1107 × 1063 × 123 |
| Column (mm) | 17385 × 17385 × 21460 | 307 × 248 × 248 |
| Pontoon (mm) | 114070 × 20120 × 8540 | 1630 × 287 × 122 |
| Draft (mm) | 19,000 | 271 |
| Displacement (kg) | 5.17 × 107 | 150.73 |
| Roll Radius of inertia (mm) | 33300 | 476 |
| Pitch Radius of inertia (mm) | 33400 | 477 |
| Yaw Radius of inertia (mm) | 35000 | 500 |



4.3. Free-Decay Tests for Damping Modification
| Motion | Scale Model | Full Scale Numerical Model | ||
|---|---|---|---|---|
| Period (s) | Damping Ratio | Period (s) | Damping Ratio | |
| Surge | 32.32 | 6.05% | 270.41 | 6.05% |
| Sway | 42.40 | 6.06% | 280.74 | 6.06% |
| Heave | 2.44 | 4.48% | 20.41 | 4.48% |
| Roll | 7.26 | 6.70% | 60.74 | 6.70% |
| Pitch | 6.28 | 7.61% | 52.54 | 7.61% |
| Yaw | 42.8 | 8.64% | 358.09 | 8.64% |

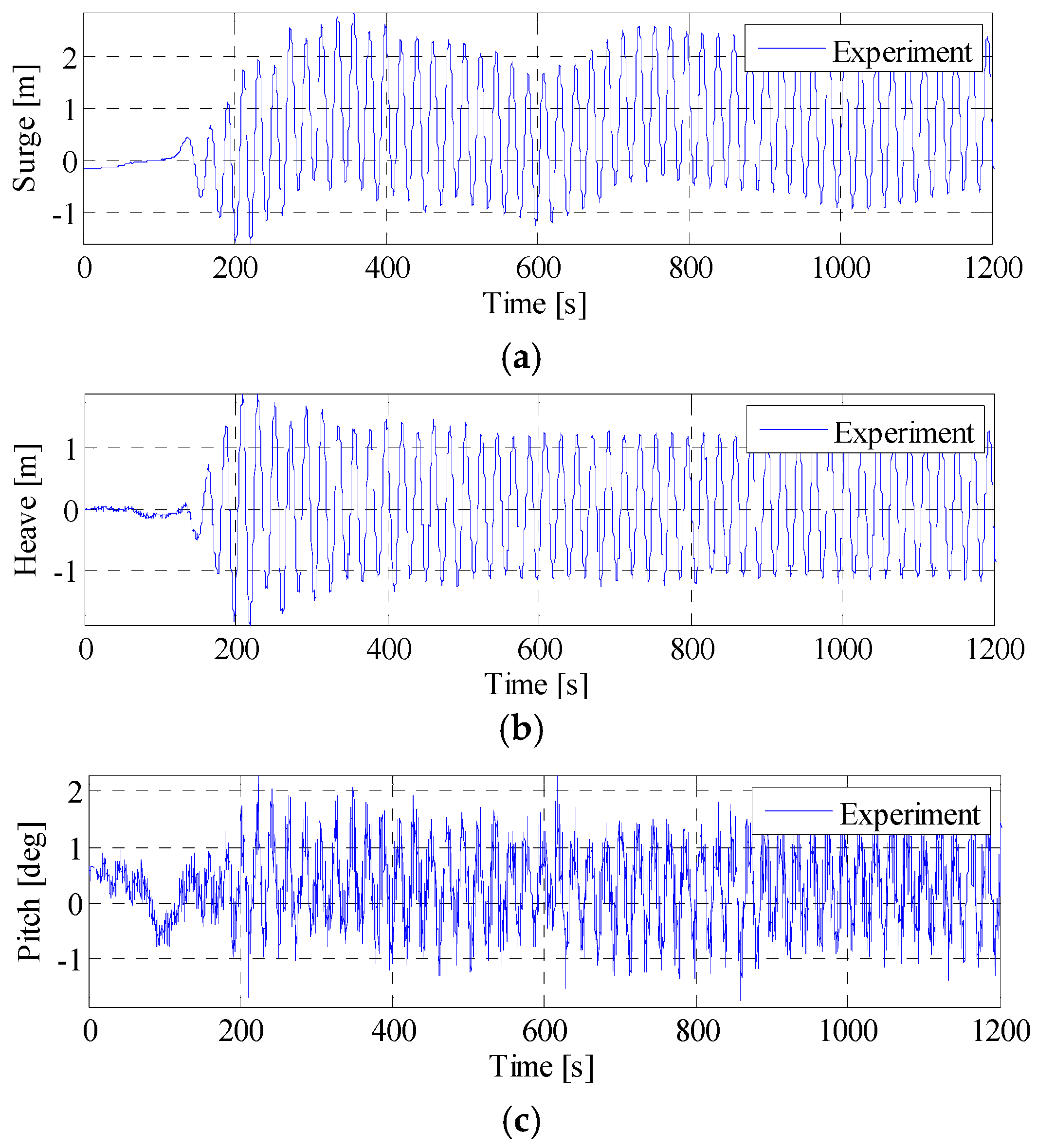
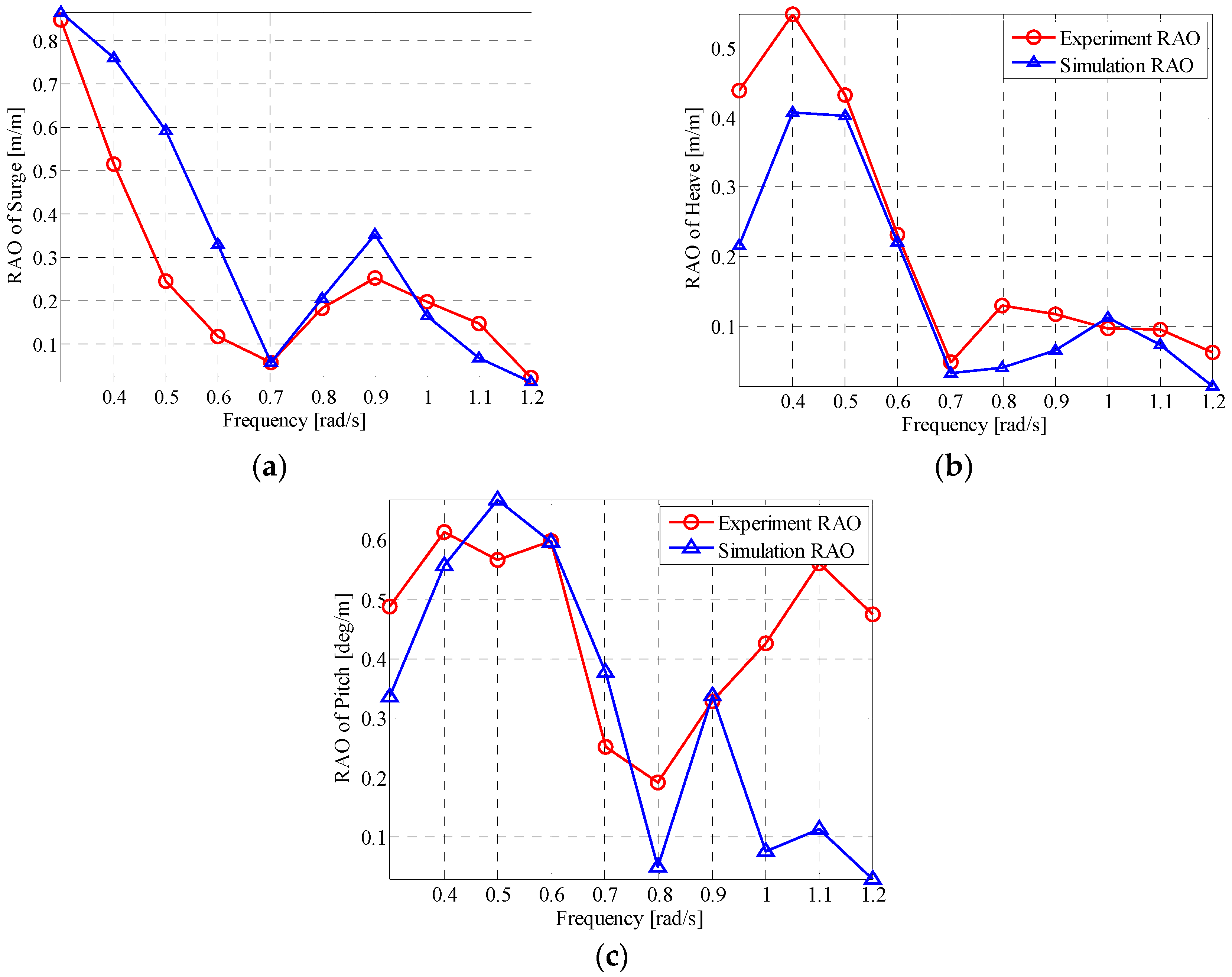
4.4. Numerical Model Validation by the Results of the Regular Wave Tests


| No. | The Real Wave States | The Aim Wave States in Tests | The Real Wave States in Tests | |||||
|---|---|---|---|---|---|---|---|---|
| Amplitude (mm) | Frequency (rad/s) | Period (s) | Amplitude (mm) | Frequency (rad/s) | Period (s) | Amplitude (mm) | Period (s) | |
| R1 | 3500 | 0.30 | 20.94 | 50.00 | 2.51 | 2.50 | 49.00 | 2.50 |
| R2 | 3500 | 0.40 | 15.71 | 50.00 | 3.35 | 1.88 | 50.00 | 1.88 |
| R3 | 3500 | 0.50 | 12.57 | 50.00 | 4.18 | 1.50 | 49.50 | 1.50 |
| R4 | 3500 | 0.60 | 10.47 | 50.00 | 5.02 | 1.25 | 49.30 | 1.25 |
| R5 | 3500 | 0.70 | 8.98 | 50.00 | 5.86 | 1.07 | 46.20 | 1.07 |
| R6 | 3500 | 0.80 | 7.85 | 50.00 | 6.69 | 0.94 | 50.30 | 0.94 |
| R7 | 3500 | 0.90 | 6.98 | 50.00 | 7.53 | 0.83 | 40.60 | 0.83 |
| R8 | 1400 | 1.00 | 6.28 | 20.00 | 8.37 | 0.75 | 16.90 | 0.75 |
| R9 | 1400 | 1.10 | 5.71 | 20.00 | 9.20 | 0.68 | 18.60 | 0.68 |
| R10 | 1400 | 1.20 | 5.24 | 20.00 | 10.04 | 0.63 | 21.60 | 0.63 |
5. Parameter Study of the THPEH System
| Wave Condition | (m) | (rad/s) | (s) | ||
|---|---|---|---|---|---|
| Name | Descriptions | ||||
| IRW-1 | 100-year in GM | 12.20 | 0.45 | 14.00 | 2.00 |
| IRW-2 | 100-year in SCS | 13.30 | 0.41 | 15.50 | 3.30 |
| IRW-3 | 10-year in SCS | 11.10 | 0.46 | 13.60 | 2.00 |
| IRW-4 | Working condition in GM | 3.96 | 0.70 | 9.00 | 2.00 |
| IRW-5 | Working condition in SCS | 6.00 | 0.56 | 11.20 | 2.00 |
| IRW-6 | Average condition in GM | 2.40 | 0.82 | 7.70 | 2.00 |
| IRW-7 | Average condition in NS | 1.88 | 0.86 | 7.28 | 2.00 |
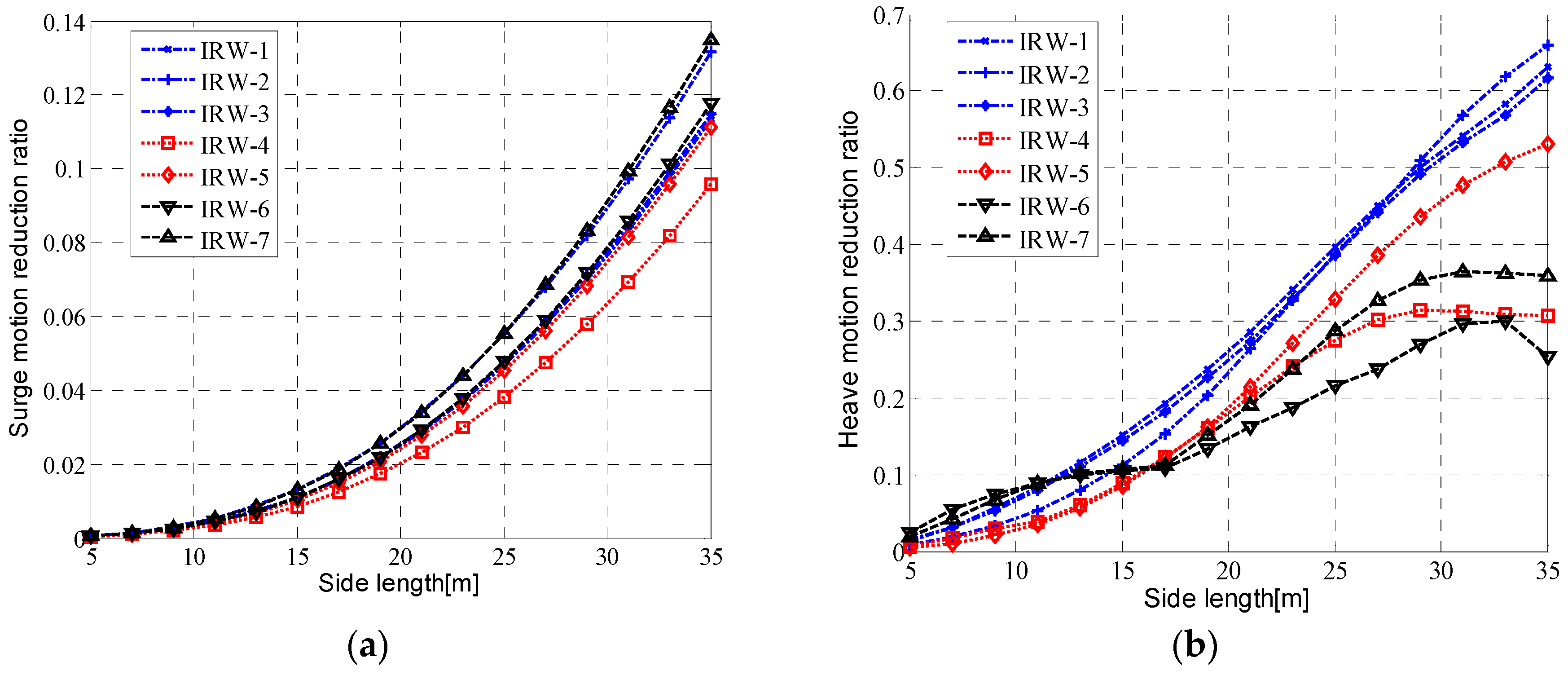
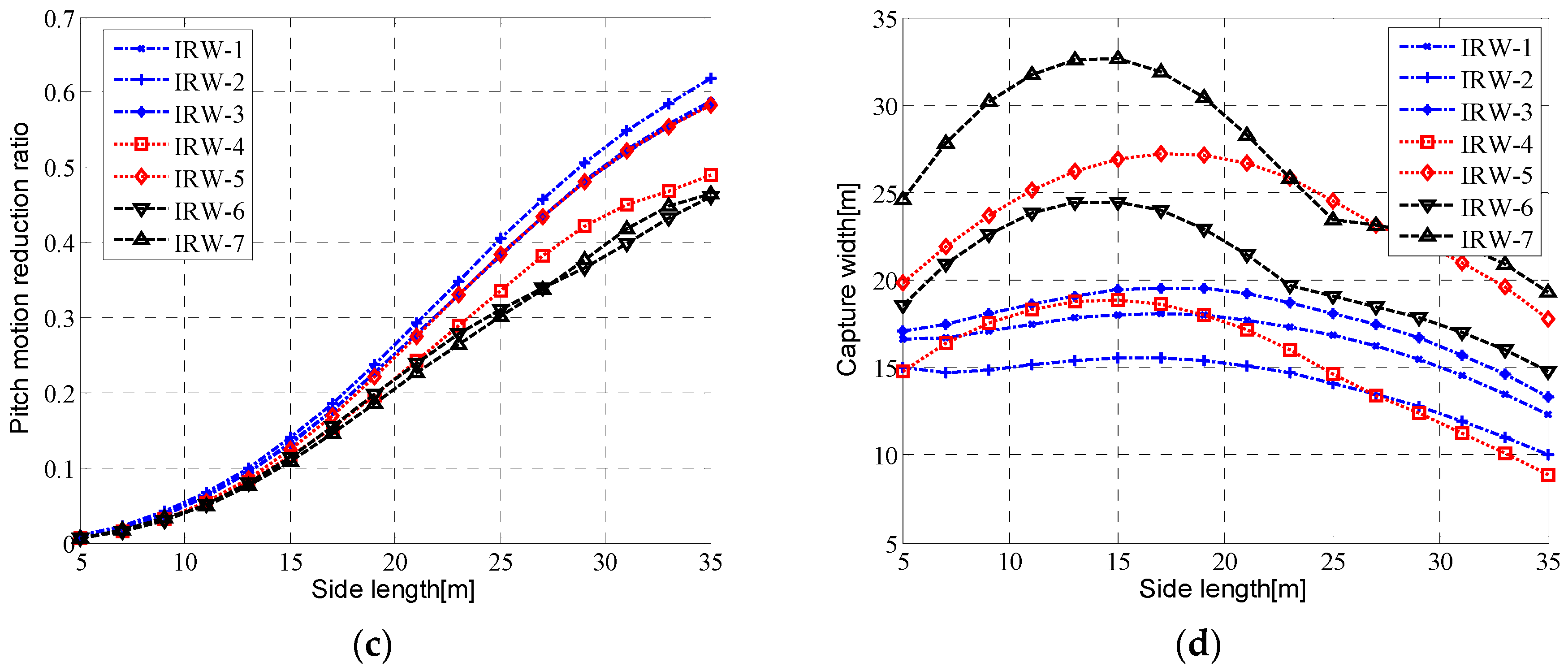
5.1. Parameter Study of the Size of the Tuned Heave Plates in the THPEH System


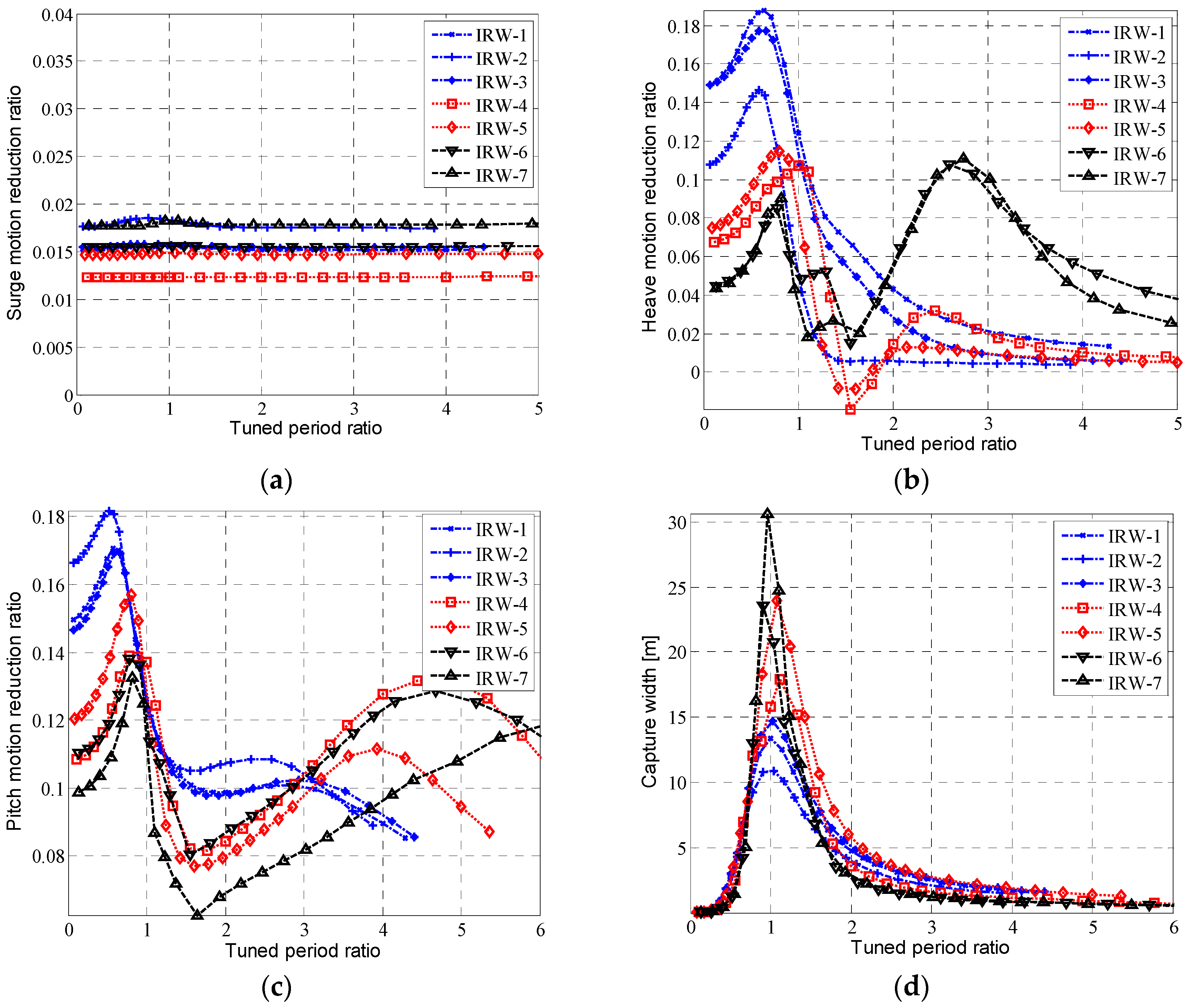
5.2. Parameter Study of the Tuned Period of the Tuned Heave Plate


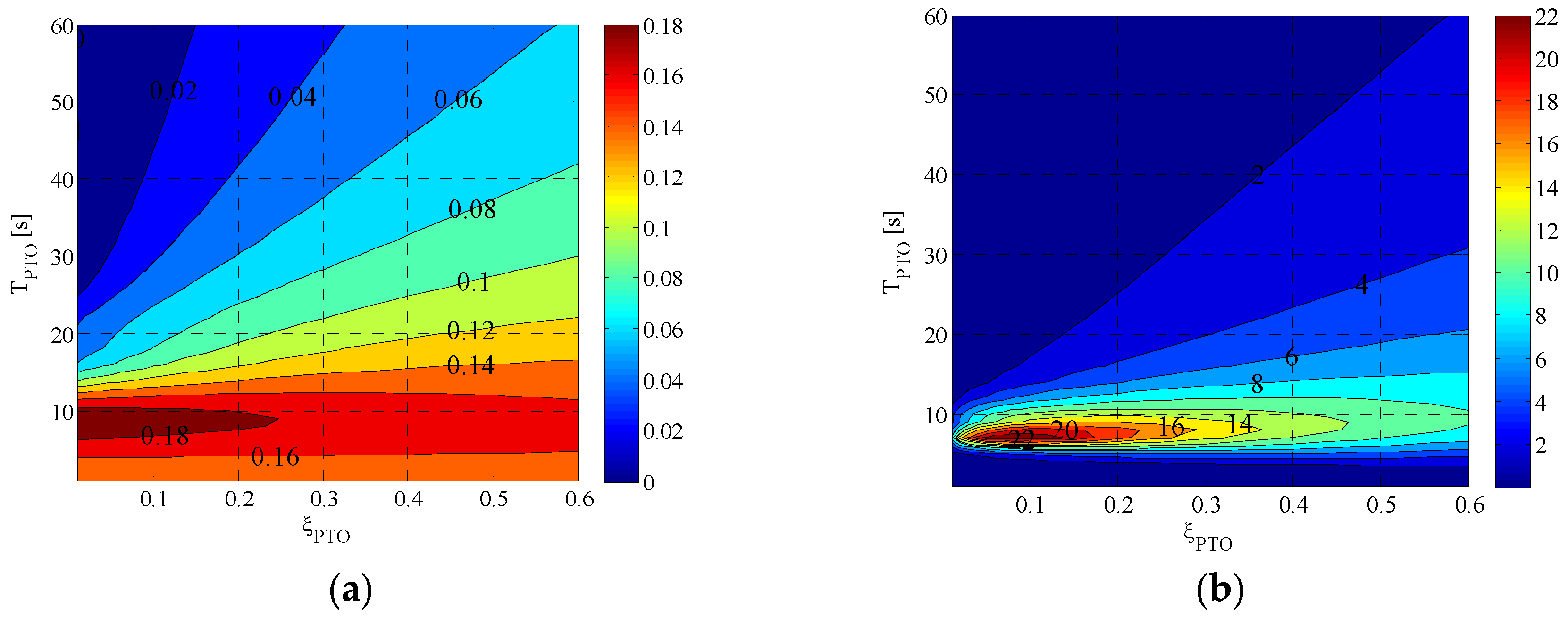
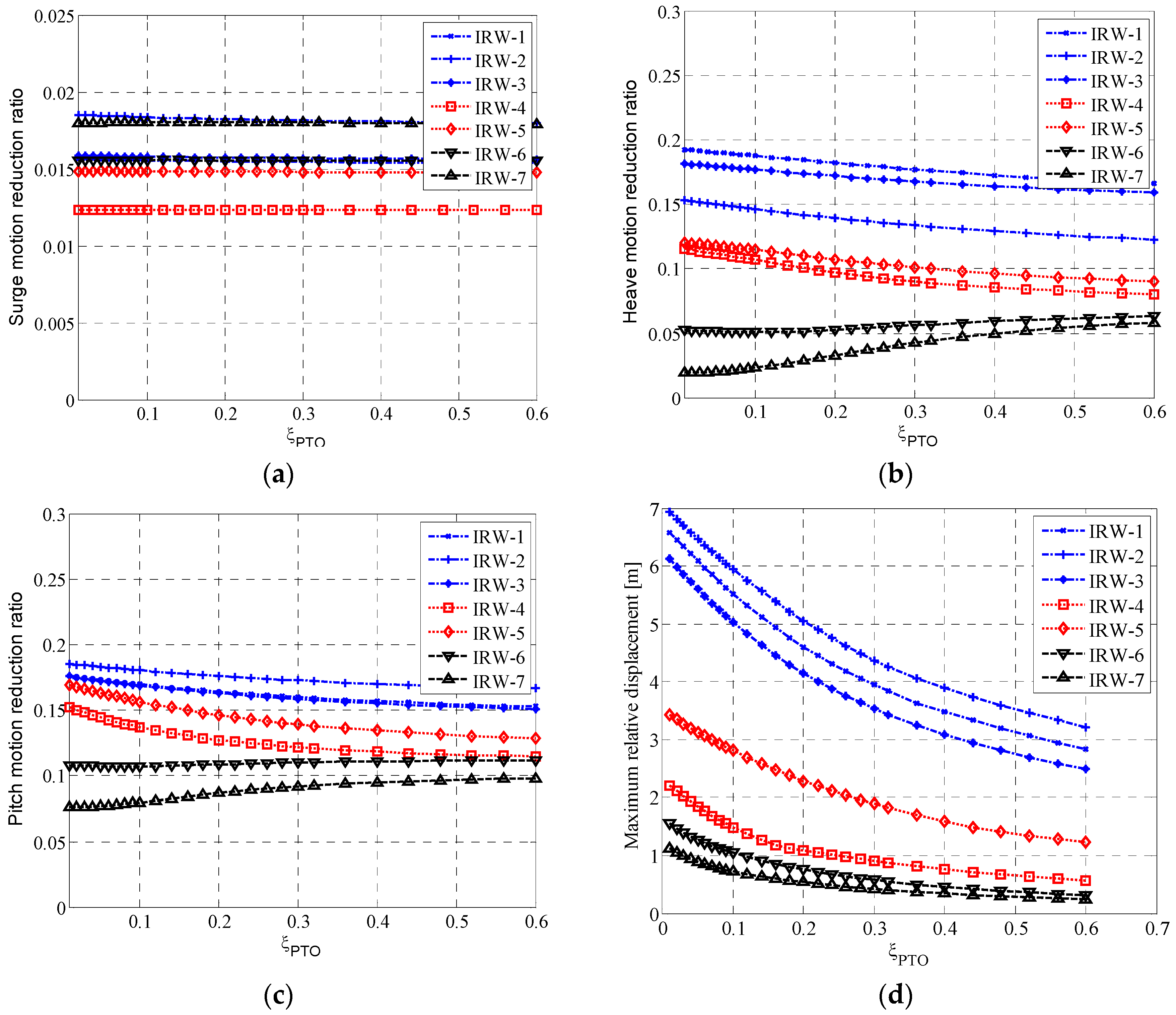
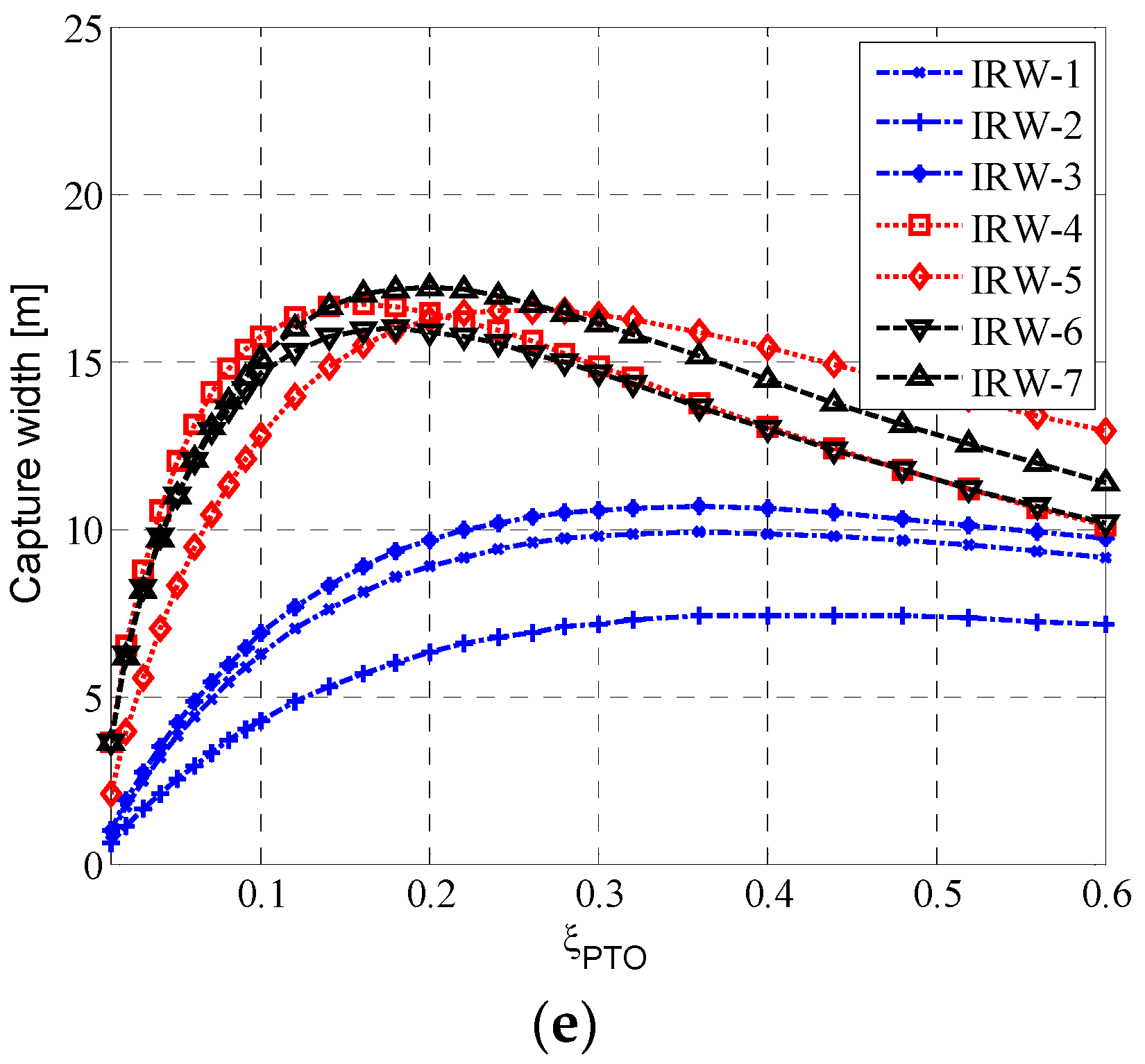
5.3. Parameter Study of the Damping Coefficient of the Power Take-Off System (PTO)


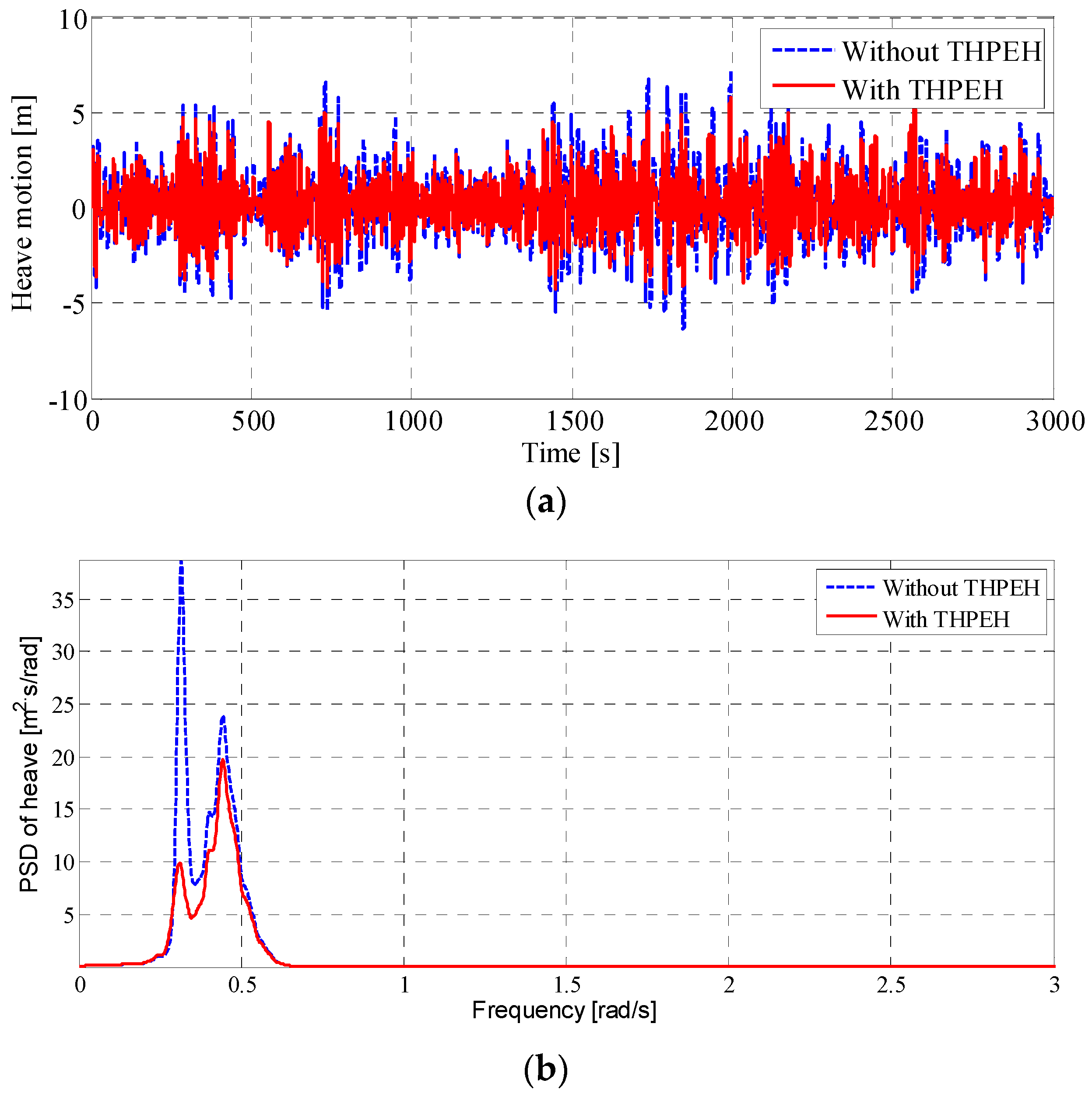
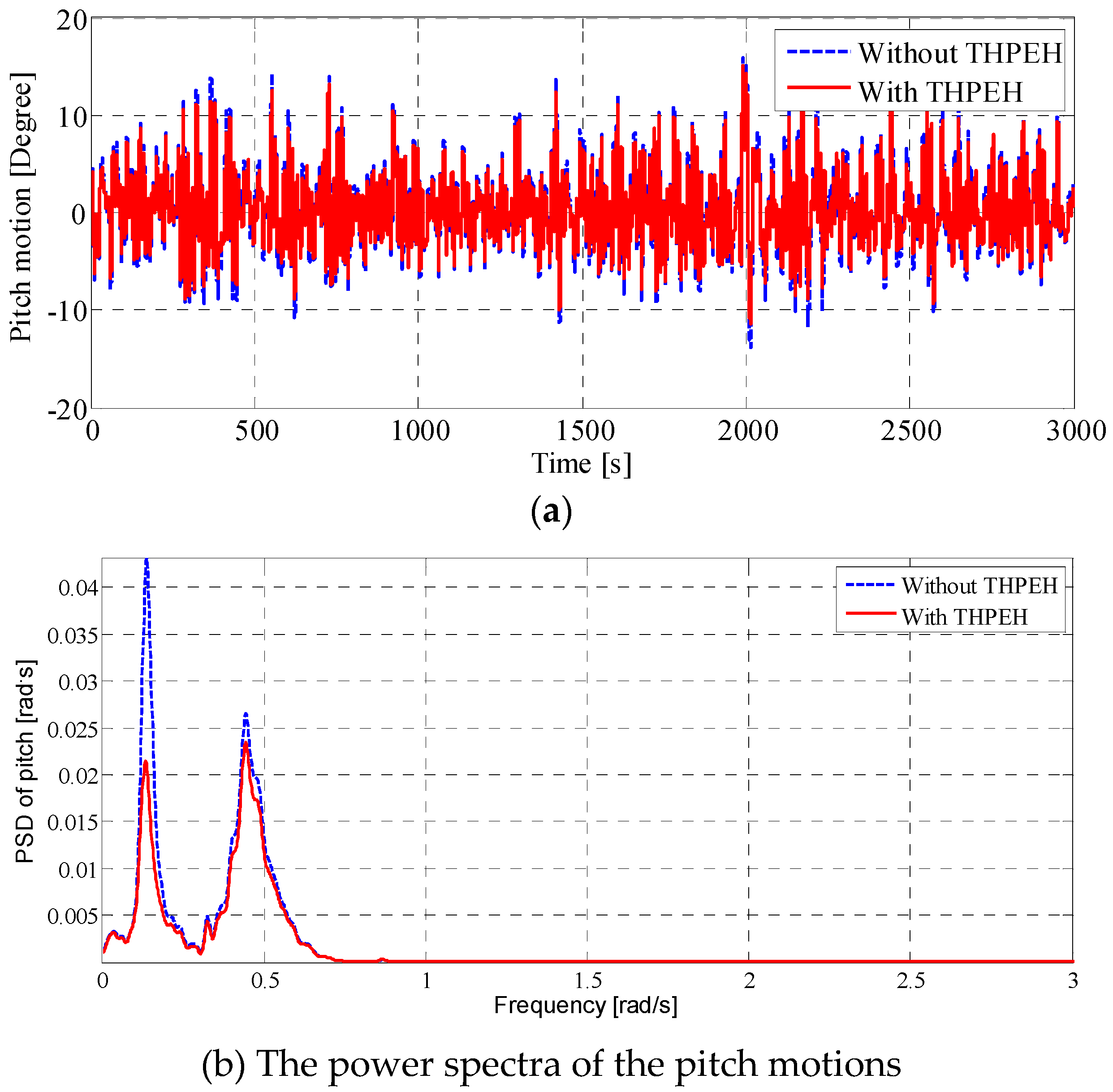
6. Results and Discussion
| Wave Name | Heave Motion Response | Pitch Motion Response | Energy Harvesting | |||||
|---|---|---|---|---|---|---|---|---|
| without THPEH (m) | with THPEH (m) | Reduction Ratio | without THPEH (Degree) | with THPEH (Degree) | Reduction Ratio | (kW) | (m) | |
| IRW-1 | 1.99 | 1.62 | 18.25% | 4.34 | 3.86 | 11.03% | 1040.5 | 1.02 |
| IRW-2 | 2.31 | 1.98 | 13.96% | 4.85 | 4.30 | 11.43% | 972.11 | 0.72 |
| IRW-3 | 1.72 | 1.42 | 17.24% | 3.86 | 3.44 | 10.96% | 910.27 | 1.11 |
| IRW-4 | 0.16 | 0.14 | 9.73% | 0.75 | 0.70 | 7.20% | 130.64 | 1.89 |
| IRW-5 | 0.57 | 0.51 | 10.74% | 1.67 | 1.51 | 9.42% | 367.95 | 1.86 |
| IRW-6 | 0.05 | 0.05 | 5.26% | 0.29 | 0.28 | 4.64% | 39.63 | 1.82 |
| IRW-7 | 0.04 | 0.04 | 3.30% | 0.20 | 0.19 | 2.94% | 24.88 | 1.97 |





7. Conclusions
- By introducing a viscous damping matrix to the numerical model, the precision of the numerical model is acceptable compared to the wave tank tests.
- For the reasonable plate size range, the control performance of the platform motion increases with the growth of the plate size. However, there is an optimal size of the plate under each wave condition for energy harvesting.
- The novel THPEH system could significantly reduce the motions of the semi-submersible platform. The optimal tuned natural period of the THPEH depends on the wave condition. For normal severe wave conditions in the South China Sea, the optimal tuned period is approximately 9 s.
- For different wave conditions, in order to achieve the maximum energy absorption, the damping ratio of the THPEH system is approximately 20%. The damping ratio has significant impacts on the relative motion range. Moreover, the optimal tuned natural period for energy harvesting is near the wave peak frequency.
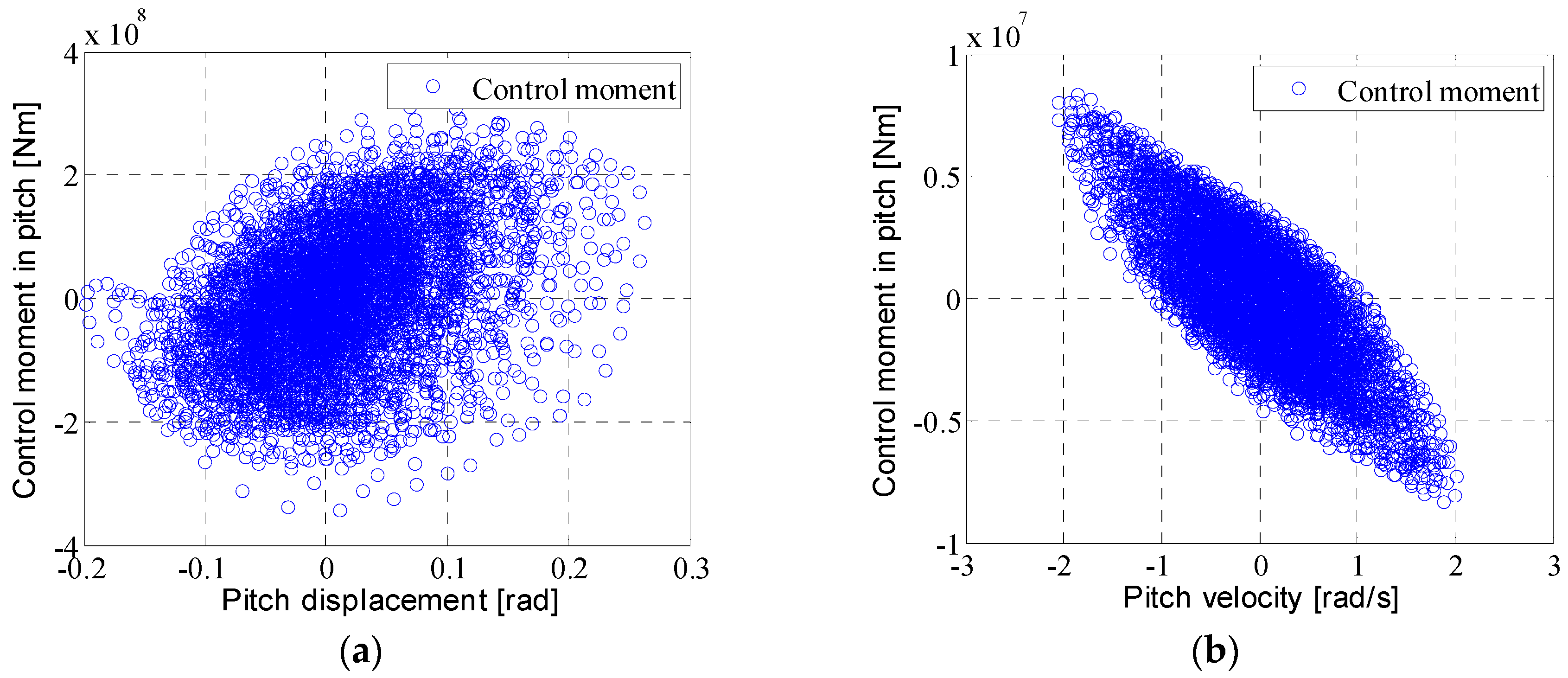
- With optimal parameters, the control forces in the heave and pitch motions have both a damping force characteristic and a slight negative stiffness characteristic, which are all positive for motion suppression.
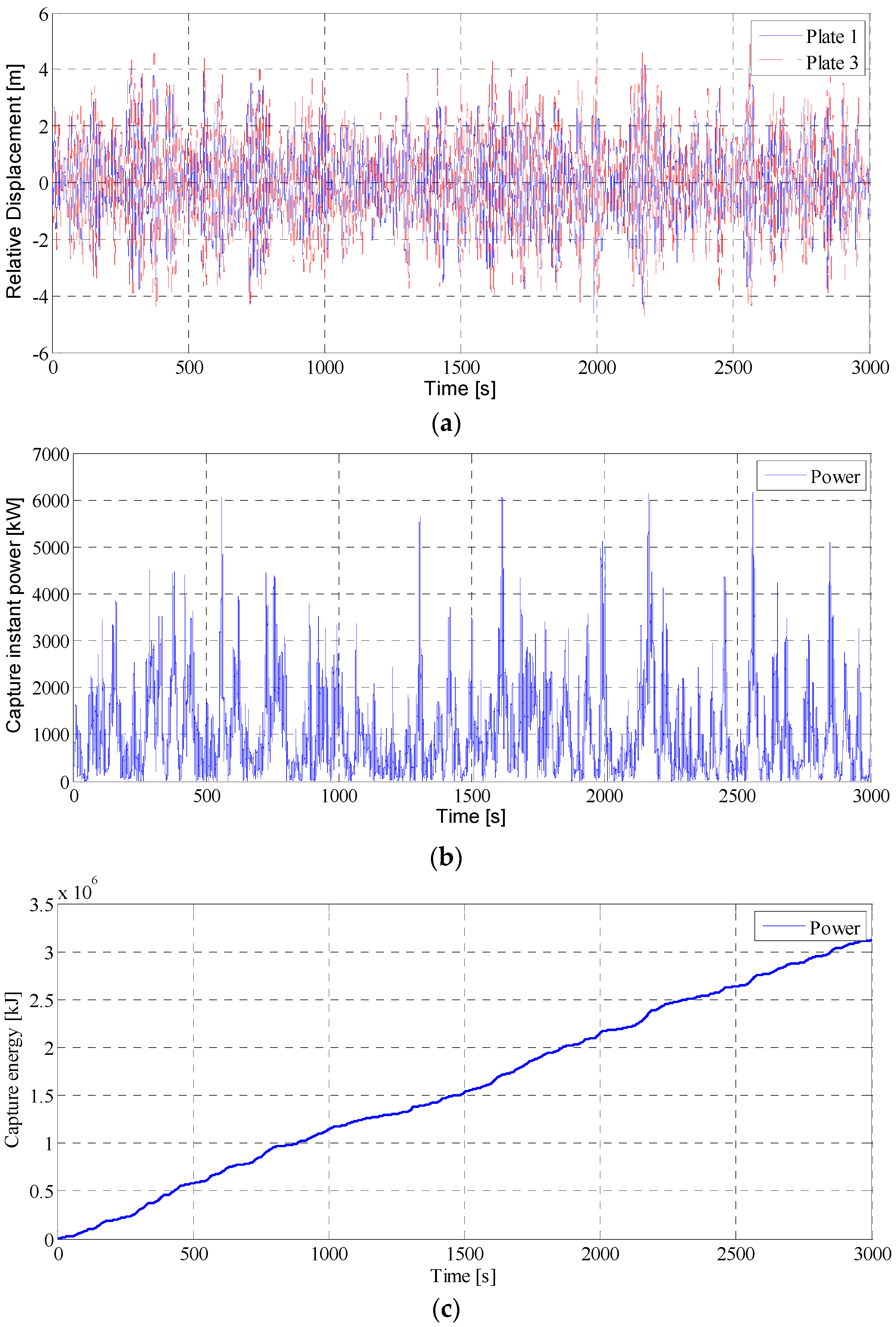
- The novel tuned heave plate energy harvesting system could reduce the motion of a semi-submersible platform and generate considerable power, which makes the THPEH system have broad application prospects.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Polinder, H.; Damen, M.E.; Gardner, F. Linear PM generator system for wave energy conversion in the AWS. IEEE Trans. Energy Convers. 2004, 19, 583–589. [Google Scholar] [CrossRef]
- Brekken, T.K.; von Jouanne, A.; Han, H.Y. Ocean wave energy overview and research at Oregon State University. In Proceedings of the 2009 IEEE Power Electronics and Machines in Wind Applications, Lincoln, NE, USA, 24–26 June 2009.
- Yeung, R.W.; Peiffer, A.; Tom, N.; Matlak, T. Design, analysis, and evaluation of the UC-Berkeley wave-energy extractor. J. Offshore Mech. Arct. Eng. 2012, 134, 021902. [Google Scholar] [CrossRef]
- Mavrakos, S.A. Hydrodynamic coefficients in heave of two concentric surface-piercing truncated circular cylinders. Appl. Ocean Res. 2004, 26, 84–97. [Google Scholar] [CrossRef]
- Falcão, A.F.O.; Cândido, J.; Justino, P.; Henriques, J. Hydrodynamics of the IPS buoy wave energy converter including the effect of non-uniform acceleration tube cross section. Renew. Energy 2012, 41, 105–114. [Google Scholar] [CrossRef]
- Cermelli, C.; Roddier, D.; Busso, C. MINIFLOAT: A novel concept of minimal floating platform for marginal field development. In Proceedings of the Fourteenth International Offshore and Polar Engineering Conference, Toulon, France, 23–28 May 2004.
- Murray, J.J.; Yang, C.; Cheng, C.; Nah, E. Two dry tree semisubmersible designs for ultra deep water post-Katrina Gulf of Mexico. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008.
- Chakrabarti, S.; Barnett, J.; Kanchi, H.; Mehta, A.; Yim, J. Design analysis of a truss pontoon semi-submersible concept in deep water. Ocean Eng. 2007, 34, 621–629. [Google Scholar] [CrossRef]
- Mills, T.; Chen, C.Y. Deep Draft Semi-Submersible Offshore Floating Structure. U.S. Patent 20070224000 A1, 27 September 2007. [Google Scholar]
- Frahm, H. Device for Damping Vibrations of Bodies. U.S. Patent 989958 A, 18 April 1911. [Google Scholar]
- Soong, T.T.; Dargush, G.F. Passive Energy Dissipation Systems in Structural Engineering; Wiley: Hoboken, NJ, USA, 1997. [Google Scholar]
- Spencer, B., Jr.; Nagarajaiah, S. State of the art of structural control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Housner, G.W.; Bergman, L.; Caughey, T.; Chassiakos, A.; Claus, R.; Masri, S.; Skelton, R.; Soong, T.; Spencer, B.; Yao, J.; et al. Structural control: Past, present, and future. J. Eng. Mech. 1997, 123, 897–971. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, C.; Li, H.; Ou, J. Real-time hybrid simulation approach for performance validation of structural active control systems: A linear motor actuator based active mass driver case study. Struct. Control Health Monit. 2014, 21, 574–589. [Google Scholar] [CrossRef]
- Kourakis, I. Structural Systems and Tuned Mass Dampers of Super-Tall Buildings: Case Study of Taipei 101; Massachusetts Institute of Technology: Cambridge, MA, USA, 2007. [Google Scholar]
- Xu, H.B.; Zhang, C.; Li, H.; Tan, P.; Ou, J.; Zhou, F. Active mass driver control system for suppressing wind-induced vibration of the Canton Tower. Smart Struct. Syst. 2014, 13, 281–303. [Google Scholar] [CrossRef]
- Zhu, S.; Shen, W.A.; Xu, Y.L. Linear electromagnetic devices for vibration damping and energy harvesting: Modeling and testing. Eng. Struct. 2012, 34, 198–212. [Google Scholar] [CrossRef]
- Ali, S.F.; Adhikari, S. Energy harvesting dynamic vibration absorbers. J. Appl. Mech. 2013, 80, 041004. [Google Scholar] [CrossRef]
- Tang, X.; Zuo, L. Simulation and experiment validation of simultaneous vibration control and energy harvesting from buildings using tuned mass dampers. In Proceedings of the 2011 American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011.
- Liu, K.; Zhu, H.; Ou, J. Application of TMD in heave response control of semi-submersible platforms. Eng. Mech. 2011, 28, 205–210. [Google Scholar]
- Zhu, H.; Ou, J.; Zhai, G. Conceptual design of a deep draft semi-submersible platform with a moveable heave-plate. J. Ocean Univ. China 2012, 11, 7–12. [Google Scholar] [CrossRef]
- Cummins, W. The impulse response function and ship motions. Schiffstechnik 1962, 47, 101–109. [Google Scholar]
- Hals, J.; Falnes, J.; Moan, T. Constrained optimal control of a heaving buoy wave-energy converter. J. Offshore Mech. Arct. Eng. 2011, 133, 011401. [Google Scholar] [CrossRef] [Green Version]
- Tao, L.; Cai, S. Heave motion suppression of a Spar with a heave plate. Ocean Eng. 2004, 31, 669–692. [Google Scholar] [CrossRef]
- Tao, L.; Dray, D. Hydrodynamic performance of solid and porous heave plates. Ocean Eng. 2008, 35, 1006–1014. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, J.; Li, R.; Hu, Z. Effects of heave plate on the hydrodynamic behaviors of cell spar platform. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006.
- Prislin, I.; Blevins, R.; Halkyard, J. Viscous damping and added mass of solid square plates. In Proceedings of the 17th International Conference on Offshore Mechanics and Arctic Engineering, Lisbon, Portugal, 15–19 June 1998.
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Liang, H.; Ou, J. Numerical Investigation of a Tuned Heave Plate Energy-Harvesting System of a Semi-Submersible Platform. Energies 2016, 9, 82. https://doi.org/10.3390/en9020082
Liu K, Liang H, Ou J. Numerical Investigation of a Tuned Heave Plate Energy-Harvesting System of a Semi-Submersible Platform. Energies. 2016; 9(2):82. https://doi.org/10.3390/en9020082
Chicago/Turabian StyleLiu, Kun, Haizhi Liang, and Jinping Ou. 2016. "Numerical Investigation of a Tuned Heave Plate Energy-Harvesting System of a Semi-Submersible Platform" Energies 9, no. 2: 82. https://doi.org/10.3390/en9020082
APA StyleLiu, K., Liang, H., & Ou, J. (2016). Numerical Investigation of a Tuned Heave Plate Energy-Harvesting System of a Semi-Submersible Platform. Energies, 9(2), 82. https://doi.org/10.3390/en9020082