
Aggregator-Based Interactive Charging Management System for Electric Vehicle Charging


Abstract
:1. Introduction
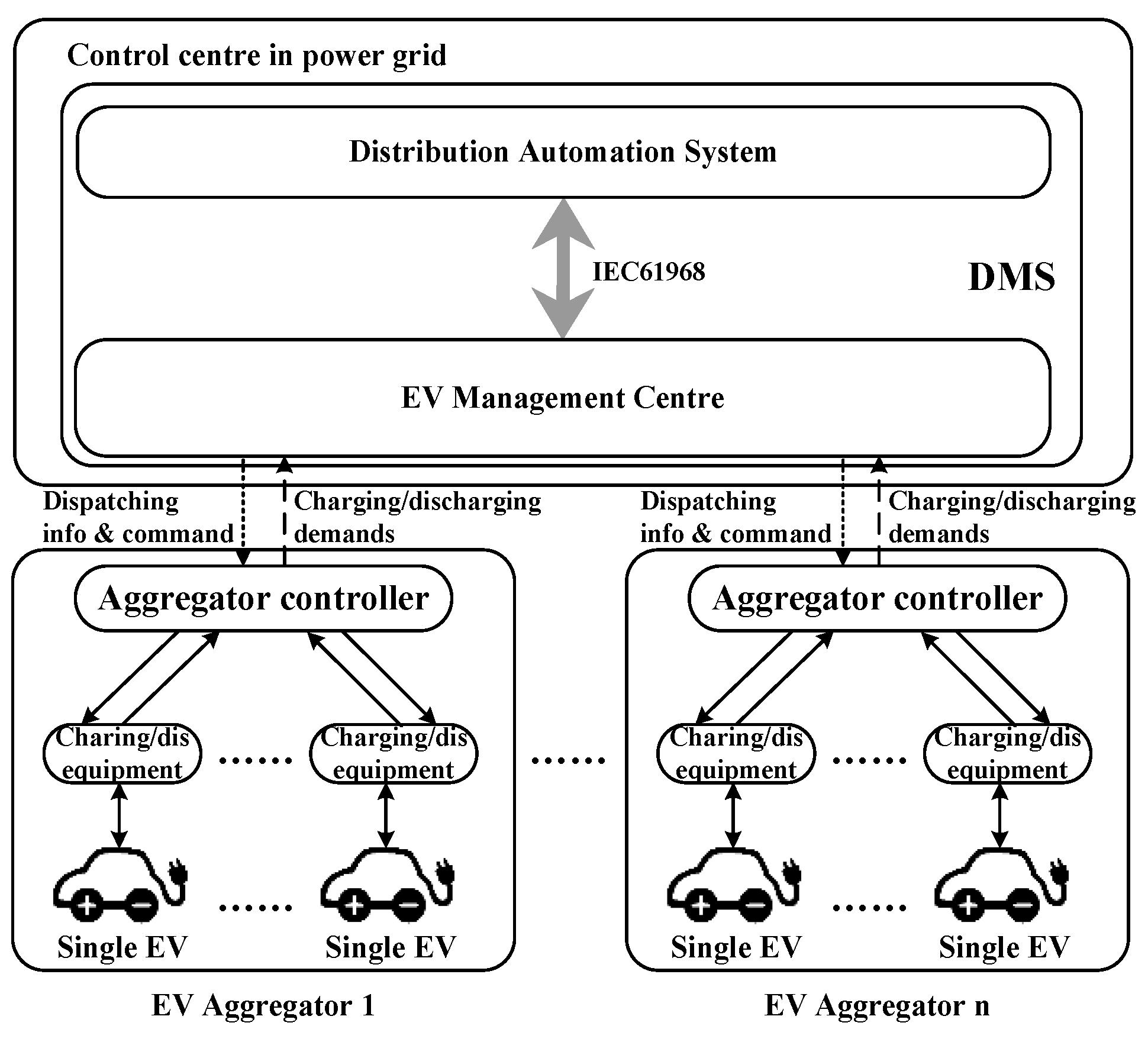
- An aggregator-based interactive charging management system adopting the IL pricing scheme is proposed in which the charging of EVs in an aggregator are clustered to form a relatively predictable and controllable load via interactive charging management. This will benefit the grid for peak-shifting, valley-filling, and optimal operation.
- A power-altering charging (PAC) control in aggregator is proposed to guarantee fair charging and EV owners’ preferences such as expected departure time and SOC. Furthermore, EVs that depart earlier than expected can get acceptable charging results. The PAC control does not require classical iterative procedures or heavy computations.
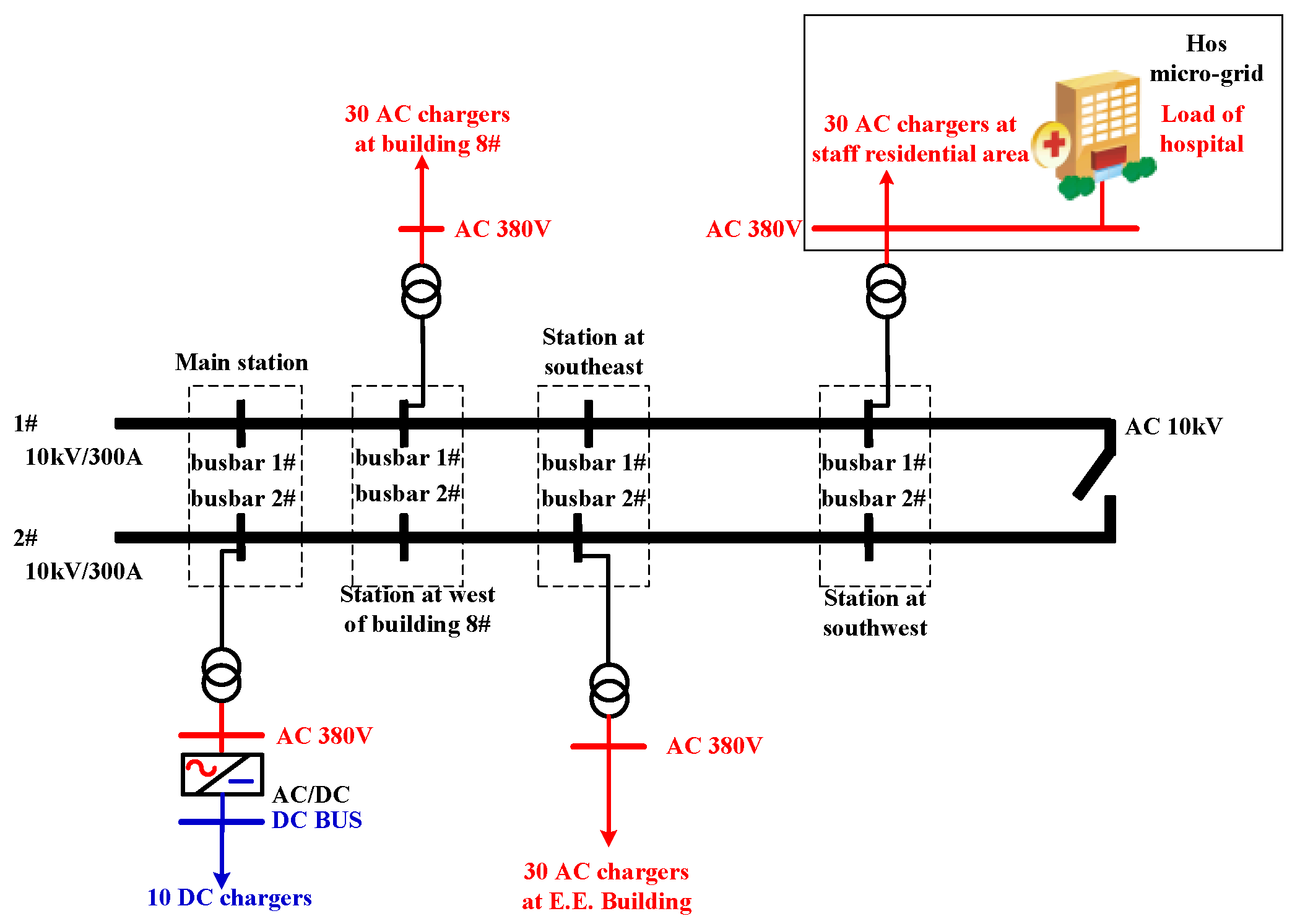
2. Scenario Description
3. Charging Management System
3.1. Interaction Process of the Charging Power of the Station
3.2. Charging Dispatching Formulation in an Aggregator
- Objective Function: For EVs from 1 to Nt in time interval t, the objective functions are as in Equation (6):where Ii_t is the binary variable of charging status of EV i at time t, Ii_t = 1 means EV i is charging, and Ii_t = 0 means not charging. Nt is the number of EVs plugged in at time t. Function “min max(ΔSOCt)” means minimizing the maximal ΔSOCt, ΔSOCt = {ΔSOC1_t, ΔSOC2_t,……, ΔSOCN_t}. ΔSOCi_t = SOCdep_i − SOCi_t is the difference between the expected departure SOC value of EV i ( SOCdep_i) and the current SOC value of EV i (SOCi_t) at time t.
- Control Variables: For EVs at time t, the charging status vector It = {I1_t, I2_t,……, IN_t} and the charging power vector Pt = {P1_t, P2_t,……, PN_t} are control variables, where Pi_t is the charging power of EV i at time t.
- Constraints: The constraints are as in Equations (7)–(11).
3.3. Power-Altering Charging Control
- For Equation (6), to maximize the amount of EVs charging, control variable It is as Equation (12):means all EVs plugged in the charging station will be charged. This will satisfy constraint (7).It = {1,1,…,1}
- For constraint (8), in each time interval, those EVs whose departure time is approaching, as in Equation (13), are treated as controlled EVs that are full-power charging:where ΔT is a time constant, and other symbols are the same as in Equation (8).
- For control variable Pt, Pt is categorized to charging power of uncontrolled EVs, EVs that are full-power charging, and normal charging EVs as in Equation (14).where is the charging power series of uncontrolled EVs, Kt is the number of uncontrolled EVs at time t, is the charging power series of controlled EVs that are full-power charging, Mt is the number of controlled EVs that are full-power charging at time t, is the charging power series of normal controlled EVs, Lt is the number of normal controlled EVs at time t.
- i)
- Charging power of uncontrolled EV k is as in Equation (15). This will satisfy constraint (11).
- ii)
- Charging power of controlled EV j that is full-power charging is as in Equation (16):
- iii)
- The power that can be dispatched for normal charging EVs, Pdispatch_t, is as in Equation (17):
4. Results
4.1. Introduction of the Experiments
4.2. Results Analysis
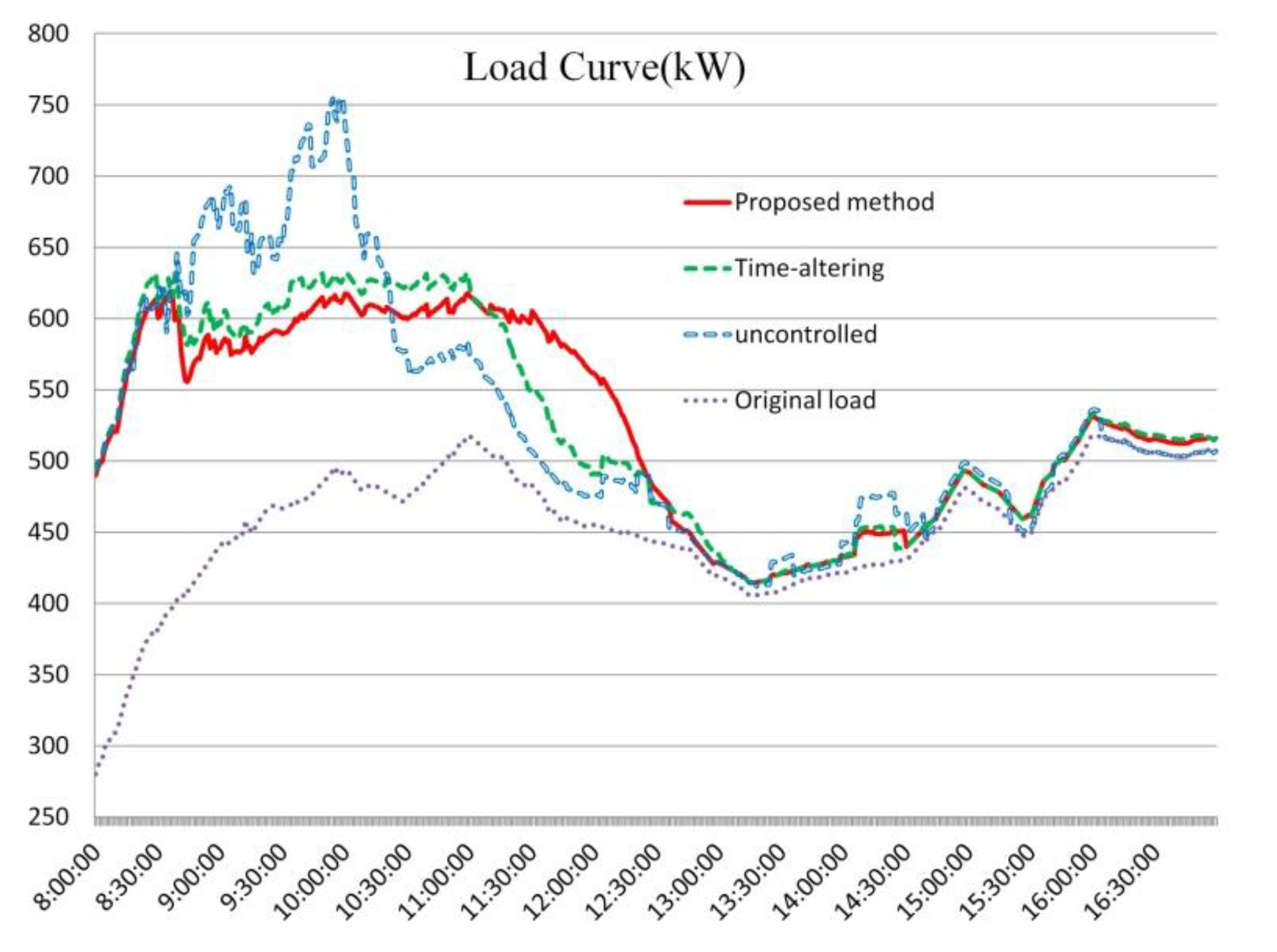
4.2.1. Effects of Charging Control on the Load Curve
4.2.2. Effects of Charging Control Methods on EVs
5. Conclusions
- The interactive charging strategy provides a way for EV charging loads clustered in an aggregator to respond to the load-control command of the grid. This will make the EV charging loads predictable and controllable to some extent, and improve the flexibility and reliability of the grid operation.
- The proposed PAC control method can dispatch charging power fairly in an aggregator and guarantee the EV owner’s preferences. Furthermore, the PAC method has good charging results for EVs departing earlier than expected.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| EV | Electric vehicle |
| IL | Interruptible load |
| SOC | State of charge |
| EVMC | Electric vehicle management centre |
| DMS | Distribution management system |
| SCADA | Supervisory control and data acquisition |
| AI | Artificial intelligence |
| PAC | Power-altering charging |
Nomenclatures
| dchar_i | Duration needed for EV i to be charged in full power to its expected SOC |
| Ii_t | Charging status of EV i at time t |
| Charging status of uncontrolled EV k at time t | |
| Kt_h | Number of uncontrolled EVs in station h at time t |
| Lt | Number of normal controlled EVs at time t |
| Mt_h | Number of controlled EVs that are full-power charging in station h at time t |
| Nt_h | Number of EVs connected in station h at time t |
| Pforce_t | Forced charging power of aggregator at time t |
| Pc_max_t | Maximum charging power of aggregator at time t |
| Pcharge_grid_t | Total expected charging power of the grid at time t |
| PL_pre_t | Load prediction value of the next time interval t excluding charging loads |
| Pc_i_t | Charging power of EV i at time t |
| Pc_grant_t | Total charging power of the station at time t |
| Prate_i | Rated charging power of EV i |
| Rated charging power of controlled EV j that is full-power charging | |
| Rated charging power of uncontrolled EV k | |
| Charging power of uncontrolled EV k at time t | |
| Charging power of normal controlled EV l at time t | |
| SOCdep_i | Expected departure SOC value of EV i |
| SOCi_t | Current SOC value of EV i at time t |
| t | Current time |
| tdep_i | Expected departure time of EV i |
| ΔSOCt | Serial of ΔSOCi_t |
| ΔSOCi_t | Difference of expected departure SOC and current SOC of EV i at time t |
| ΔT | Time constant |
References
- Fernandez, L.P.; Roman, T.G.S.; Cossent, R.; Domingo, C.M.; Frias, P. Assessment of the impact of plug-in electric vehicles on distribution networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Hilshey, A.D.; Hines, P.D.H.; Rezaei, P.; Dowds, J.R. Estimating the impact of electric vehicle smart charging on distribution transformer aging. IEEE Trans. Smart Grid 2013, 4, 905–913. [Google Scholar] [CrossRef]
- Calderaro, V.; Galdi, V.; Graber, G.; Graditi, G.; Lamberti, F. Impact assessment of energy storage and electric vehicles on smart grids. In Proceedings of the 2014 9th International Electric Power Quality and Supply Reliability Conference (PQ 2014), Rakvere, Estonia, 11–13 June 2014.
- Papadopoulos, P.; Skarvelis-Kazakos, S.; Grau, I.; Cipcigan, L.M.; Jenkins, N. Electric vehicles' impact on british distribution networks. Electr. Syst. Transp. IET 2012, 2, 91–102. [Google Scholar] [CrossRef]
- Leemput, N.; Geth, F.; Van Roy, J.; Olivella-Rosell, P.; Driesen, J.; Sumper, A. MV and LV residential grid impact of combined slow and fast charging of electric vehicles. Energies 2015, 8, 1760–1783. [Google Scholar] [CrossRef] [Green Version]
- Aziz, M.; Oda, T.; Mitani, T.; Watanabe, Y.; Kashiwagi, T. Utilization of electric vehicles and their used batteries for peak-load shifting. Energies 2015, 8, 3720–3738. [Google Scholar] [CrossRef]
- Richardson, P.; Flynn, D.; Keane, A. Optimal charging of electric vehicles in low-voltage distribution systems. IEEE Trans. Power Syst. 2012, 27, 268–279. [Google Scholar] [CrossRef]
- Xydas, E.S.; Marmaras, C.E.; Cipcigan, L.M.; Hassan, A.S.; Jenkins, N. Forecasting electric vehicle charging demand using support vector machines. In Proceedings of the 2013 48th International Universities' Power Engineering Conference (UPEC), Dublin, UK, 2–5 September 2013.
- Chis, A.; Lunden, J.; Koivunen, V. Scheduling of plug-in electric vehicle battery charging with price prediction. In Proceedings of the 2013 4th IEEE/PES Innovative Smart Grid Technologies Europe (ISGT EUROPE), Lyngby, Denmark, 6–9 October 2013.
- Luo, Z.W.; Hu, Z.C.; Song, Y.H.; Xu, Z.W.; Lu, H.Y. Optimal coordination of plug-in electric vehicles in power grids with cost-benefit analysis-part II: A case study in china. IEEE Trans. Power Syst. 2013, 28, 3556–3565. [Google Scholar] [CrossRef]
- Ma, Z.J.; Callaway, D.; Hiskens, I. Decentralized charging control for large populations of plug-in electric vehicles. In Proceedings of the IEEE Transactions on Control Systems Technology, Atlanta, GA, USA, 15–17 December 2010; pp. 67–78.
- Olivella-Rosell, P.; Villafafila-Robles, R.; Sumper, A.; Bergas-Jané, J. Probabilistic agent-based model of electric vehicle charging demand to analyse the impact on distribution networks. Energies 2015, 8, 4160–4187. [Google Scholar] [CrossRef] [Green Version]
- Bandyopadhyay, A.; Wang, L.F.; Devabhaktuni, V.K.; Green, R.C. Aggregator analysis for efficient day-time charging of plug-in hybrid electric vehicles. In Proceedings of the 2011 Ieee Power And Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011.
- Karfopoulos, E.L.; Marmaras, C.E.; Hatziargyriou, N. Charging control model for electric vehicle supplier aggregator. In Proceedings of the 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (Isgt Europe), Berlin, Germany, 14–17 October 2012.
- Sortomme, E.; Hindi, M.M.; MacPherson, S.D.J.; Venkata, S.S. Coordinated charging of plug-in hybrid electric vehicles to minimize distribution system losses. IEEE Trans. Smart Grid 2011, 2, 198–205. [Google Scholar] [CrossRef]
- He, Y.F.; Venkatesh, B.; Guan, L. Optimal scheduling for charging and discharging of electric vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105. [Google Scholar] [CrossRef]
- Bessa, R.J.; Matos, M.A. Economic and technical management of an aggregation agent for electric vehicles: A literature survey. Eur. Trans. Electr. Power 2012, 22, 334–350. [Google Scholar] [CrossRef]
- Bessa, R.J.; Matos, M.A. Optimization models for EV aggregator participation in a manual reserve market. IEEE Trans. Power Syst. 2013, 28, 3085–3095. [Google Scholar] [CrossRef]
- Di Silvestre, M.L.; Sanseverino, E.R.; Zizzo, G.; Graditi, G. An optimization approach for efficient management of ev parking lots with batteries recharging facilities. J. Ambient Intell. Humaniz. Comput. 2013, 4, 641–649. [Google Scholar] [CrossRef]
- Xi, X.; Sioshansi, R. Using price-based signals to control plug-in electric vehicle fleet charging. IEEE Trans. Smart Grid 2014, 5, 1451–1464. [Google Scholar] [CrossRef]
- Alexander, B.R. Dynamic pricing? Not so fast! A residential consumer perspective. Electr. J. 2010, 23, 39–49. [Google Scholar] [CrossRef]
- Falvo, M.C.; Graditi, G.; Siano, P. Electric vehicles integration in demand response programs. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Ischia, Italy, 18–20 June 2014; pp. 548–553.
- Yu, C.W.; Zhang, S.; Chung, T.S.; Wong, K.P. Modelling and evaluation of interruptible-load programmes in electricity markets. IEE Proc. Gener. Transm. Distrib. 2005, 152, 581–588. [Google Scholar] [CrossRef]
- Chung, T.S.; Zhang, S.H.; Yu, C.W.; Wong, K.P. Electricity market risk management using forward contracts with bilateral options. IEE Proc. Gener. Transm. Distrib. 2003, 150, 588–594. [Google Scholar] [CrossRef]
- Fahrioglu, M.; Alvarado, F.L. Designing incentive compatible contracts for effective demand management. IEEE Trans. Power Syst. 2000, 15, 1255–1260. [Google Scholar] [CrossRef]
- Santos, A.; McGuckin, N.; Nakamoto, H.Y.; Gray, D.; Liss, S. Summary of travel trends: 2009 national household travel survey; U.S. Department of Transportation Federal Highway Administration: Washington, DC, USA, 2011. [Google Scholar]
- Autonavi company China, analysis report of main cities in China, year 2015. Available online: http://download-report.cn-hangzhou.oss-pub.aliyun-inc.com/download%2F2015%E5%B9%B4%E5%BA%A6%E4%B8%AD%E5%9B%BD%E4%B8%BB%E8%A6%81%E5%9F%8E%E5%B8%82%E4%BA%A4%E9%80%9A%E5%88%86%E6%9E%90%E6%8A%A5%E5%91%8A-final.pdf (accessed on 20 January 2016).
- Frenk, J.B.G.; Kassay, G.; Kolumban, J. On equivalent results in minimax theory. Eur. J. Oper. Res. 2004, 157, 46–58. [Google Scholar] [CrossRef]
- Ehrgott, M.; Ide, J.; Schoebel, A. Minmax robustness for multi-objective optimization problems. Eur. J. Oper. Res. 2014, 239, 17–31. [Google Scholar] [CrossRef]
- Sousa, T.; Vale, Z.; Carvalho, J.P.; Pinto, T.; Morais, H. A hybrid simulated annealing approach to handle energy resource management considering an intensive use of electric vehicles. Energy 2014, 67, 81–96. [Google Scholar] [CrossRef]
- Hajforoosh, S.; Masoum, M.A.S.; Islam, S.M. Real-time charging coordination of plug-in electric vehicles based on hybrid fuzzy discrete particle swarm optimization. Electr. Pow Syst. Res. 2015, 128, 19–29. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load | Peak (kW) | Valley (kW) | Variance |
|---|---|---|---|
| Original load | 518.27 | 280.33 | 1988.8 |
| Uncontrolled | 754.37 | 411.93 | 7453.2 |
| Time-altering | 631.97 | 414.29 | 5047.7 |
| Proposed method | 617.91 | 414.29 | 4514.3 |
| SOC Range (%) | Arrival SOC of Power-Altering | Arrival SOC of Time-Altering | Departure SOC of Power-Altering | Departure SOC of Time-Altering |
|---|---|---|---|---|
| 25 | 0 | 0 | 0 | 0 |
| 30 | 0 | 0 | 0 | 0 |
| 35 | 1 | 1 | 0 | 0 |
| 40 | 0 | 0 | 0 | 0 |
| 45 | 2 | 2 | 0 | 0 |
| 50 | 3 | 3 | 0 | 0 |
| 55 | 0 | 0 | 0 | 0 |
| 60 | 1 | 1 | 0 | 0 |
| 65 | 12 | 11 | 0 | 0 |
| 70 | 24 | 23 | 0 | 1 |
| 75 | 17 | 20 | 0 | 0 |
| 80 | 11 | 16 | 1 | 1 |
| 85 | 21 | 13 | 1 | 0 |
| 90 | 8 | 8 | 2 | 2 |
| 95 | 0 | 2 | 92 | 90 |
| 100 | 0 | 0 | 4 | 6 |
| EV No. | Power-Altering Charging (PAC) | |||
| Arrival SOC (%) | Departure SOC (%) | Arrival Time | Departure Time | |
| 22 | 62 | 92 | 13:58 | 17:00 |
| 31 | 48 | 85 | 09:14 | 11:25 |
| 33 | 76 | 89 | 15:40 | 17:00 |
| 71 | 68 | 77 | 09:42 | 10:34 |
| EV No. | Time-Altering Charging | |||
| Arrival SOC (%) | Departure SOC (%) | Arrival time | Departure time | |
| 22 | 63 | 92 | 14:03 | 17:04 |
| 31 | 50 | 80 | 09:15 | 11:30 |
| 33 | 76 | 89 | 15:44 | 17:03 |
| 71 | 70 | 70 | 09:47 | 10:33 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, M.; Lai, Q.; Zhong, Y.; Li, C.; Chiang, H.-D. Aggregator-Based Interactive Charging Management System for Electric Vehicle Charging. Energies 2016, 9, 159. https://doi.org/10.3390/en9030159
Xia M, Lai Q, Zhong Y, Li C, Chiang H-D. Aggregator-Based Interactive Charging Management System for Electric Vehicle Charging. Energies. 2016; 9(3):159. https://doi.org/10.3390/en9030159
Chicago/Turabian StyleXia, Mingchao, Qingying Lai, Yajiao Zhong, Canbing Li, and Hsiao-Dong Chiang. 2016. "Aggregator-Based Interactive Charging Management System for Electric Vehicle Charging" Energies 9, no. 3: 159. https://doi.org/10.3390/en9030159
APA StyleXia, M., Lai, Q., Zhong, Y., Li, C., & Chiang, H. -D. (2016). Aggregator-Based Interactive Charging Management System for Electric Vehicle Charging. Energies, 9(3), 159. https://doi.org/10.3390/en9030159