
Robust Longitudinal Speed Control of Hybrid Electric Vehicles with a Two-Degree-of-Freedom Fuzzy Logic Controller


Abstract
:1. Introduction
2. Problem Formulation and Longitudinal Speed Control Modeling
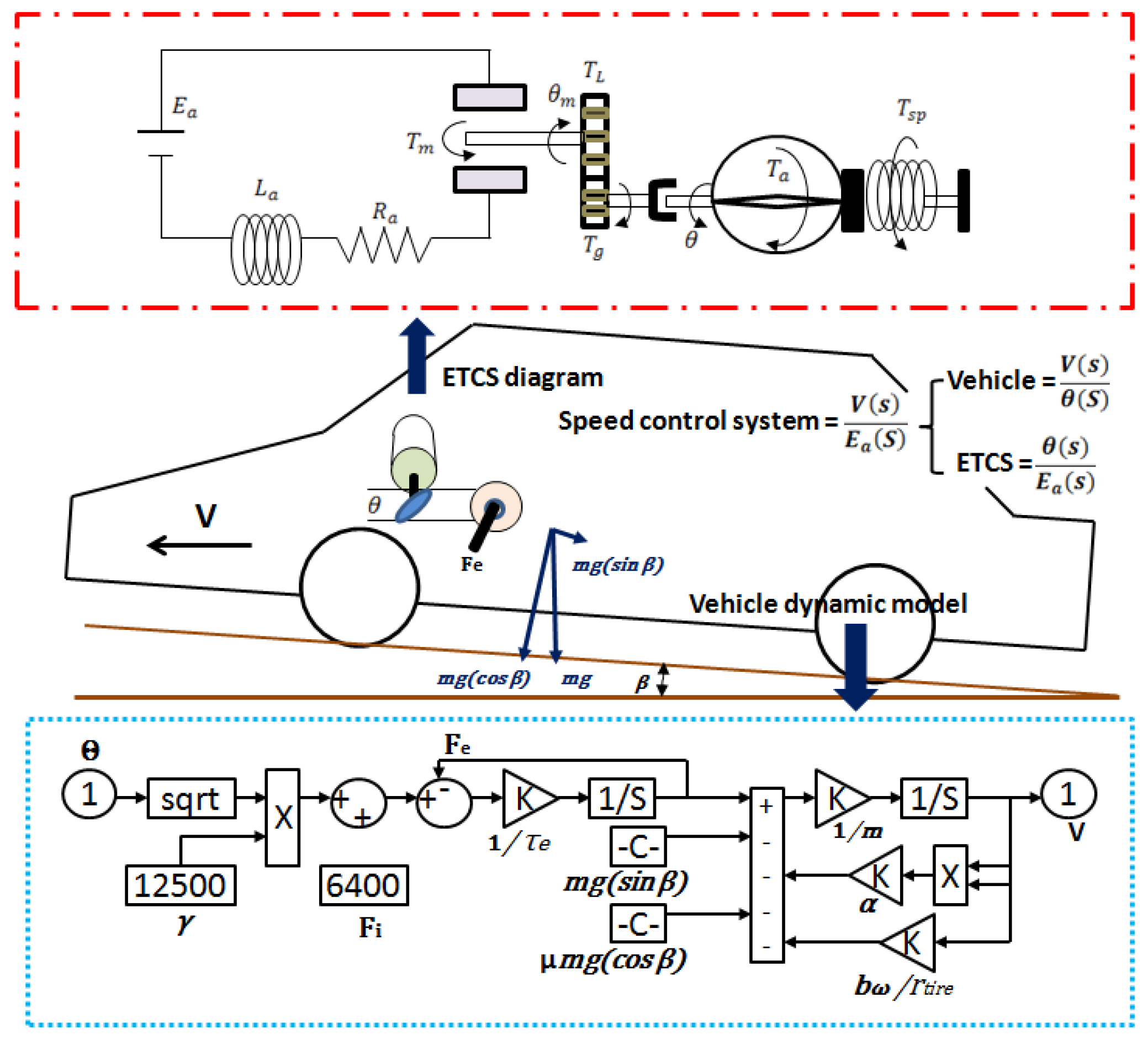
2.1. The Architecture of the HEV Model
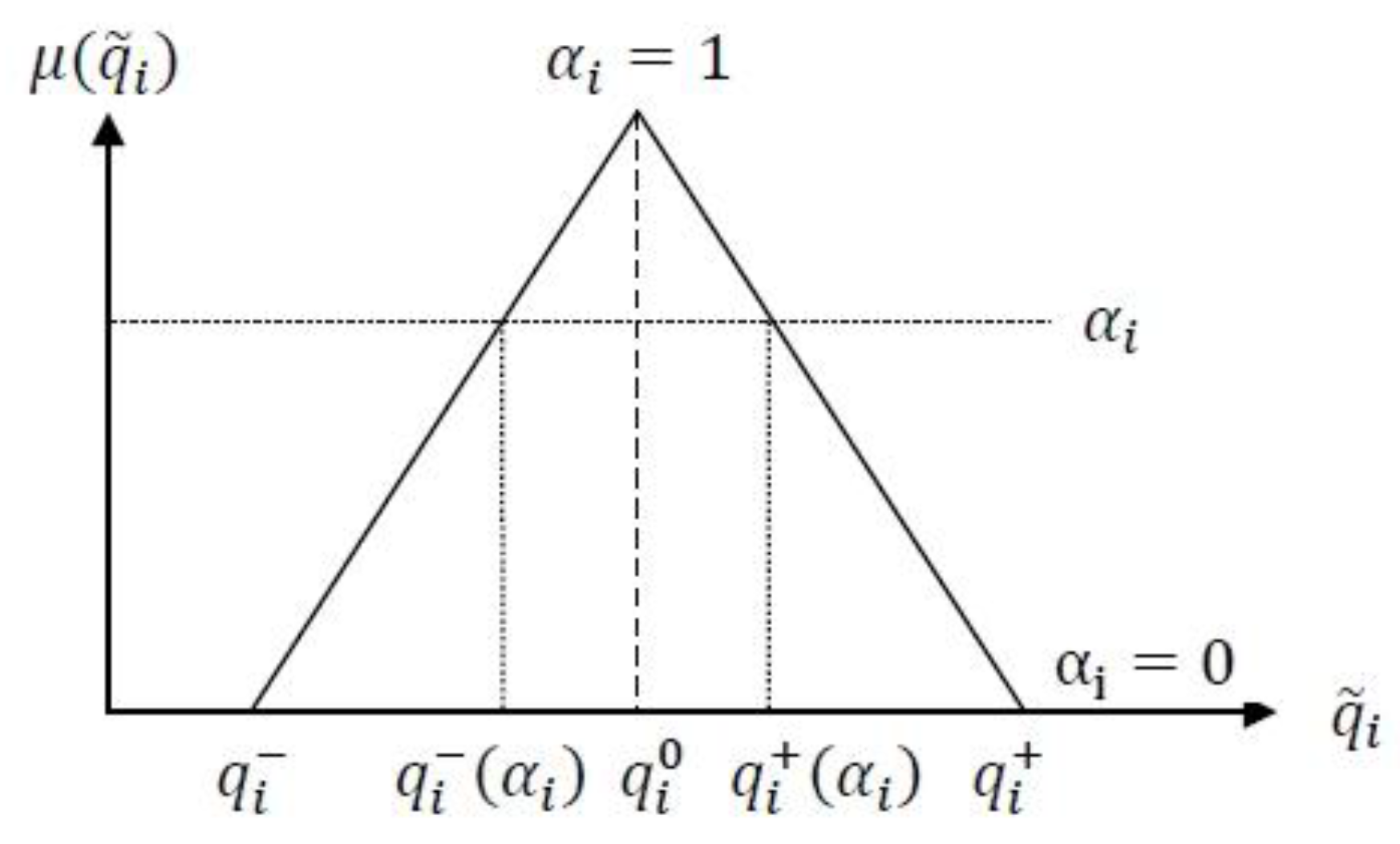
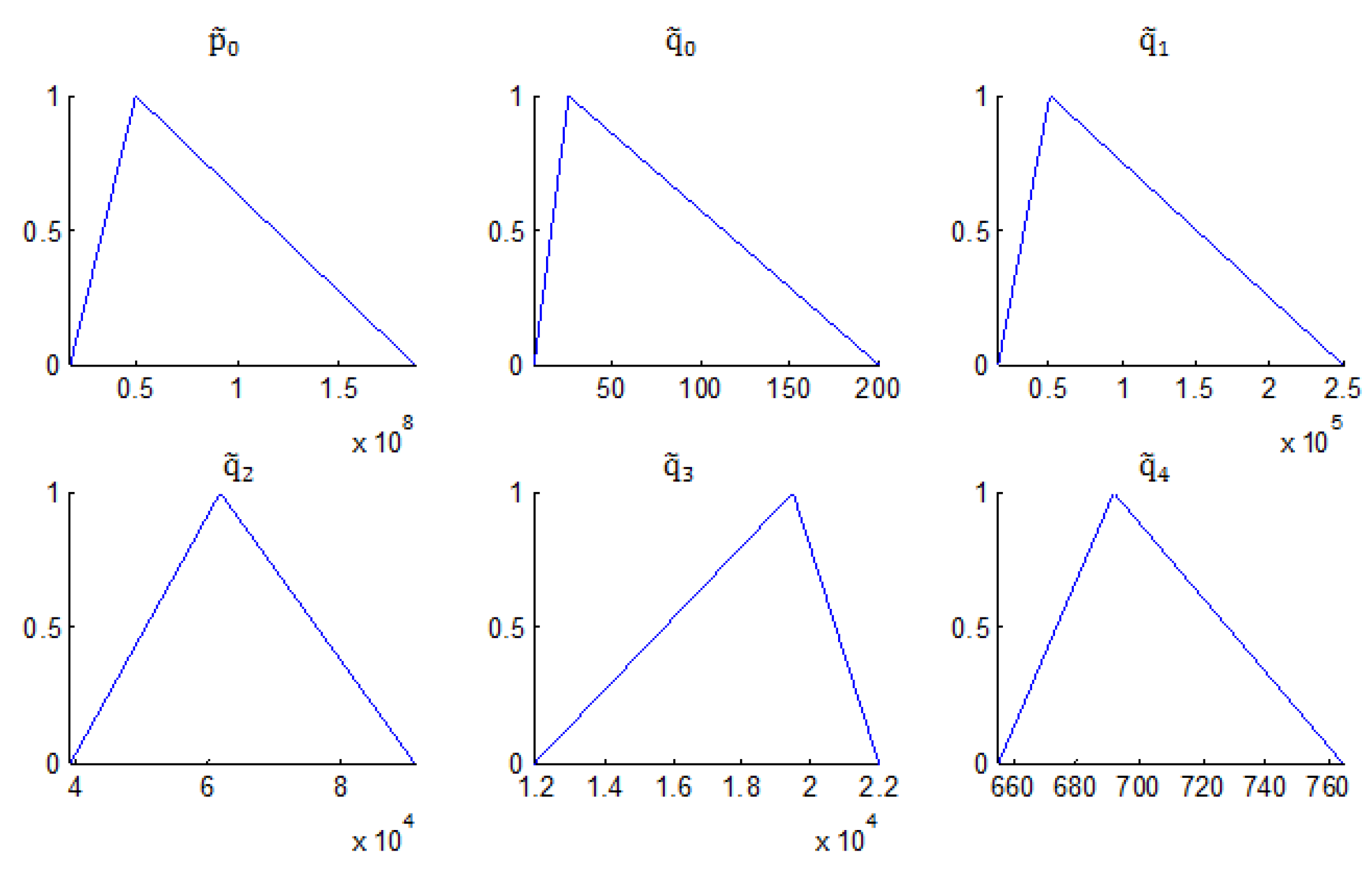
2.2. Fuzzy Parametric α-Cut Representation of the Uncertain HEV Model
3. Controller Design
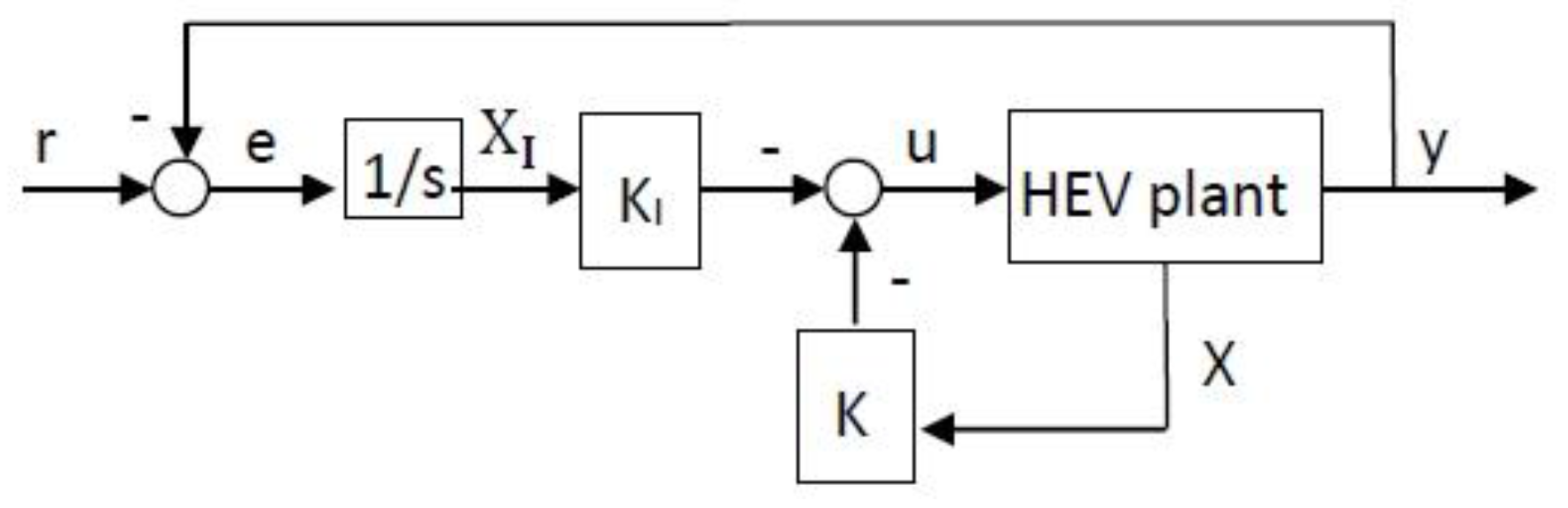
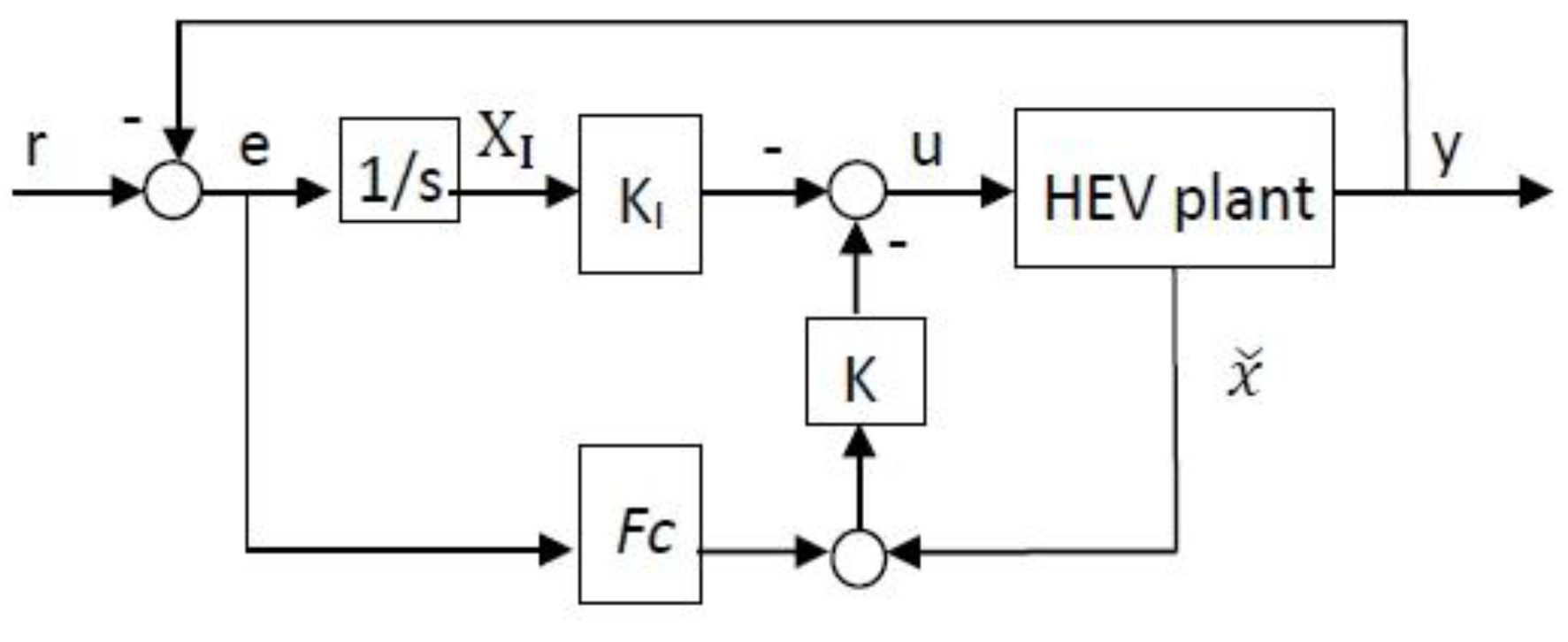
3.1. Optimal-Based Robust Feedback Controller Design
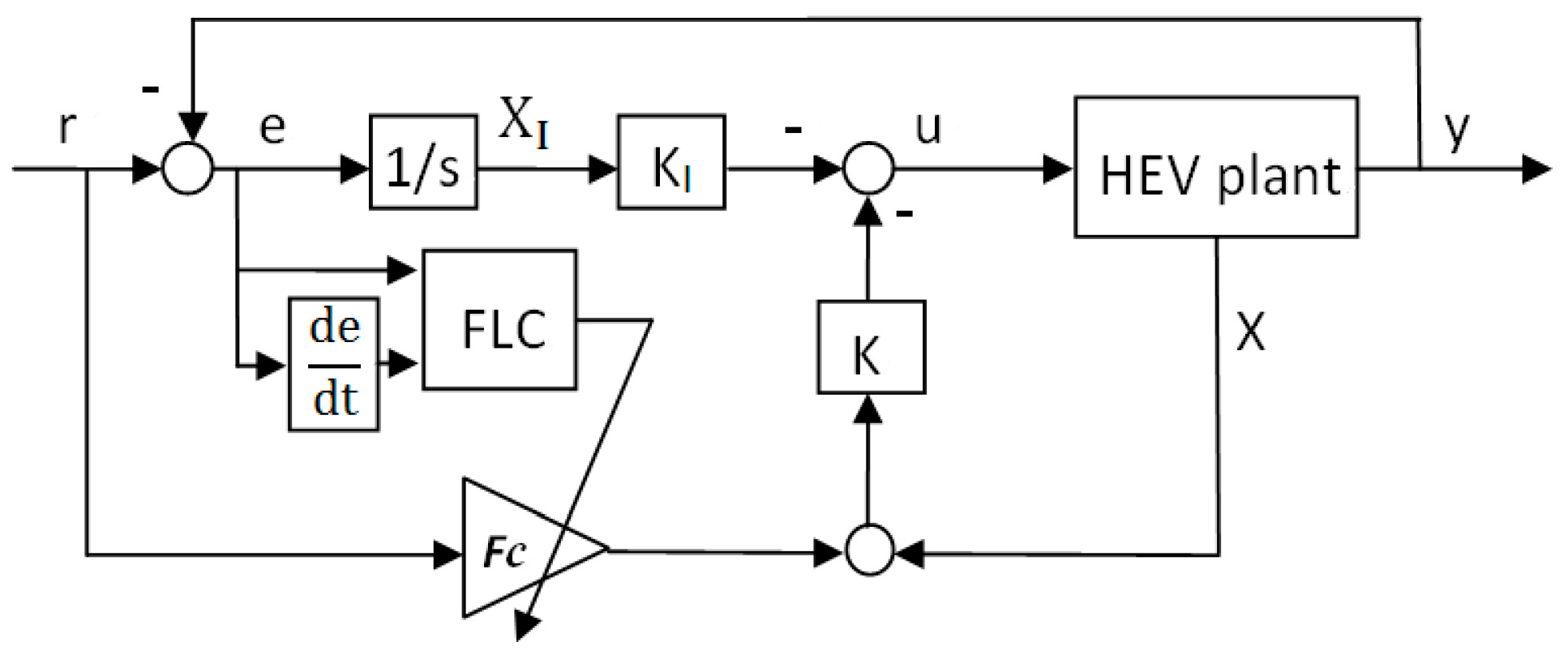
3.2. Fuzzy Logic Forward Compensator Design
3.2.1. Forward Compensator Fc Design
3.2.2. The Weighting () of Forward Compensator Tuning by FLC
3.3. Design Procedure
- Step 1: Linearize the nonlinear HEV model at specific operating points and represent as an uncertain interval model.
- Step 2: The uncertain interval parameters are represented by a fuzzy number with membership function . Translate the uncertain interval system into the fuzzy parametric uncertain system.
- Step 3: For , the maximum uncertain interval of the system is translated into the weighting matrix of the linear quadratic tracking (LQT) servo problem.
- Step 4: Design an optimal controller for , which can be considered as the worst case condition.
- Step 5: Use Kharitonov’s theorem to test whether the optimal feedback controller is a solution to stabilize all of the systems for various values of .
- Step 6: Design the FLC-based forward compensator to satisfy the performance requirements.
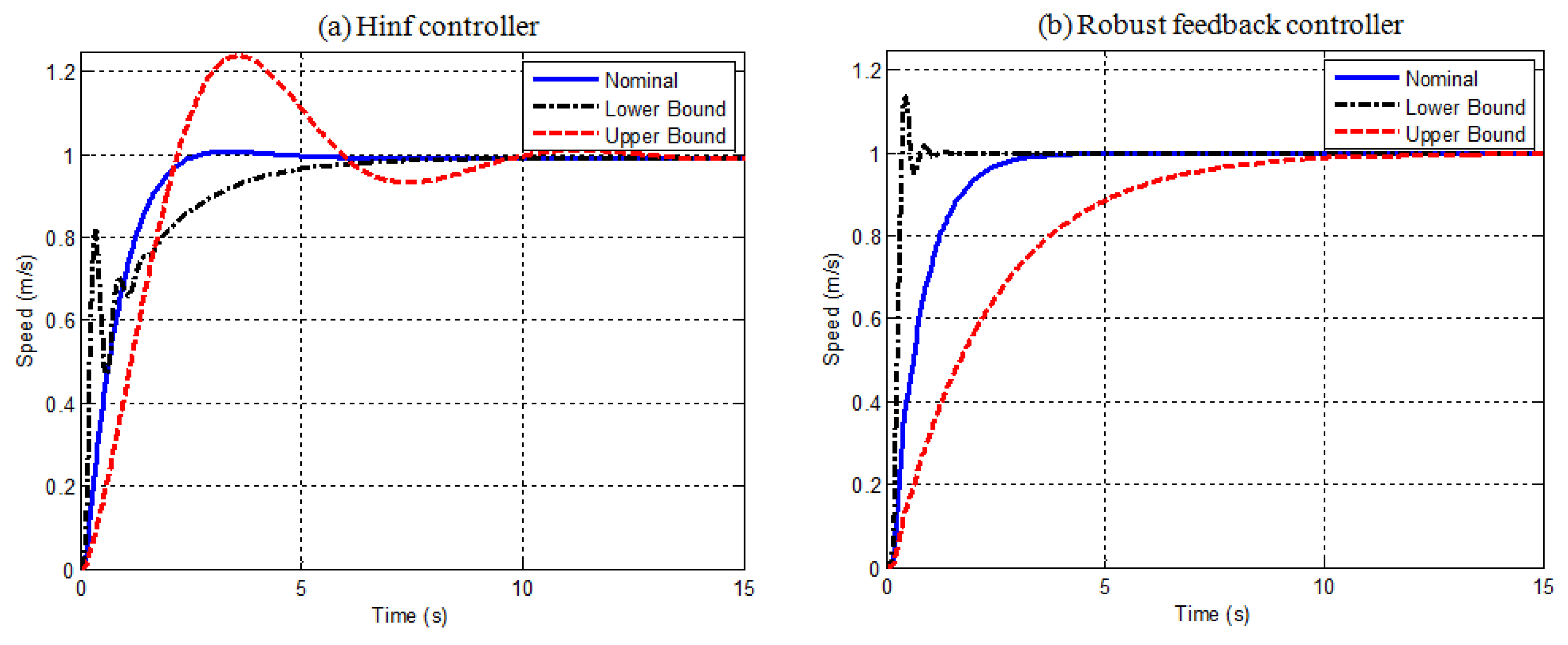
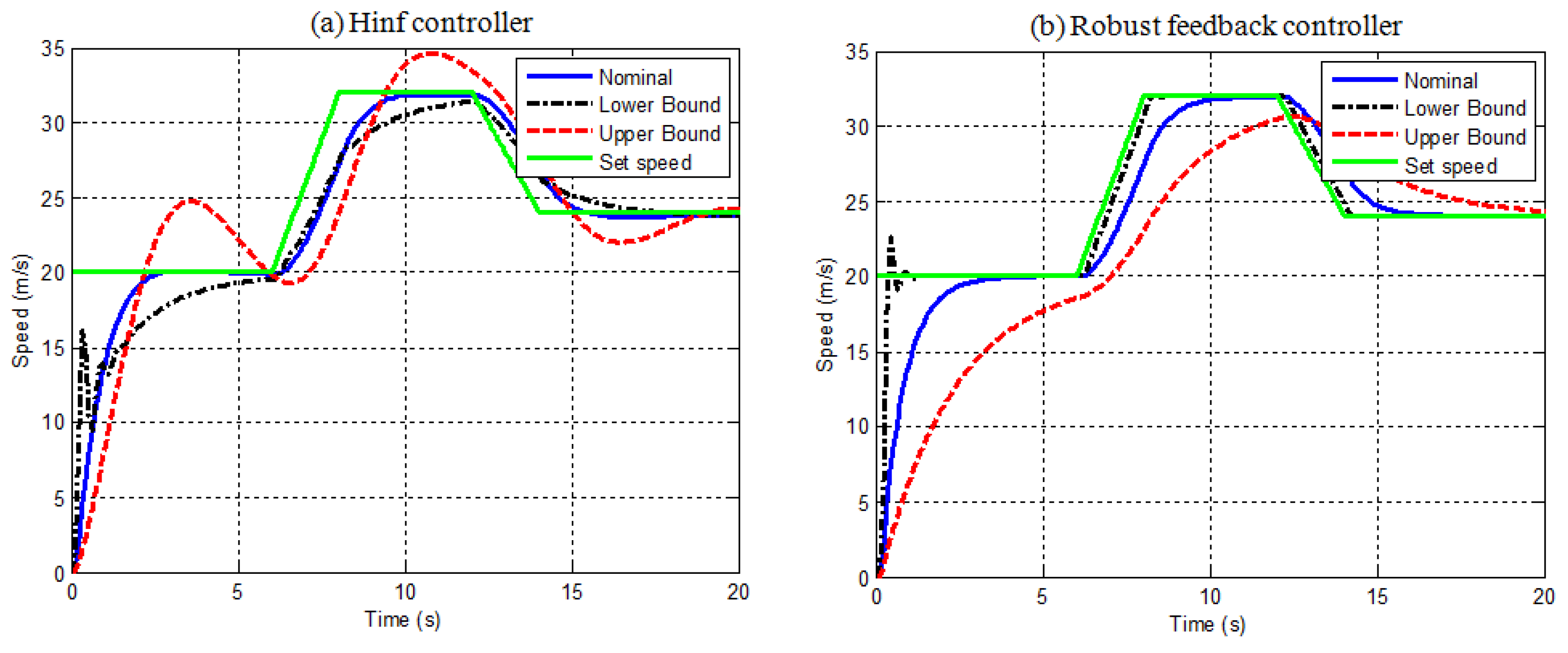
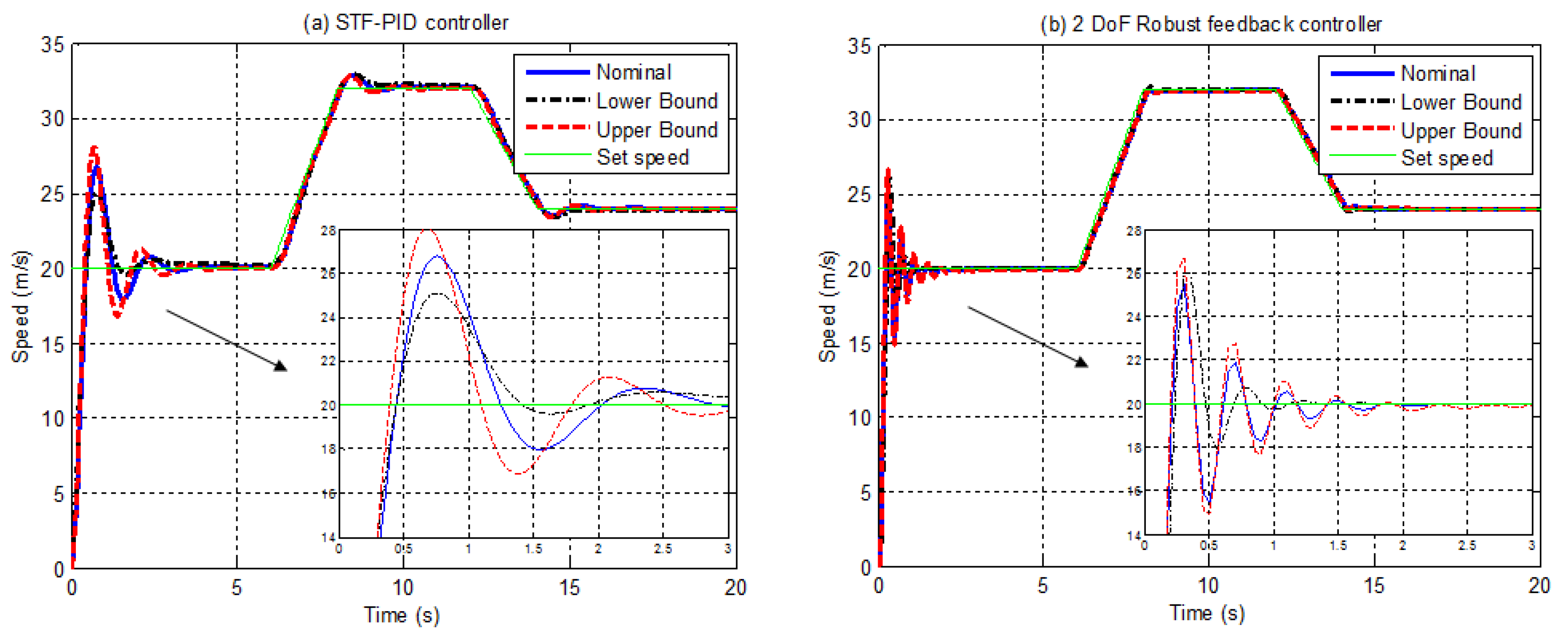
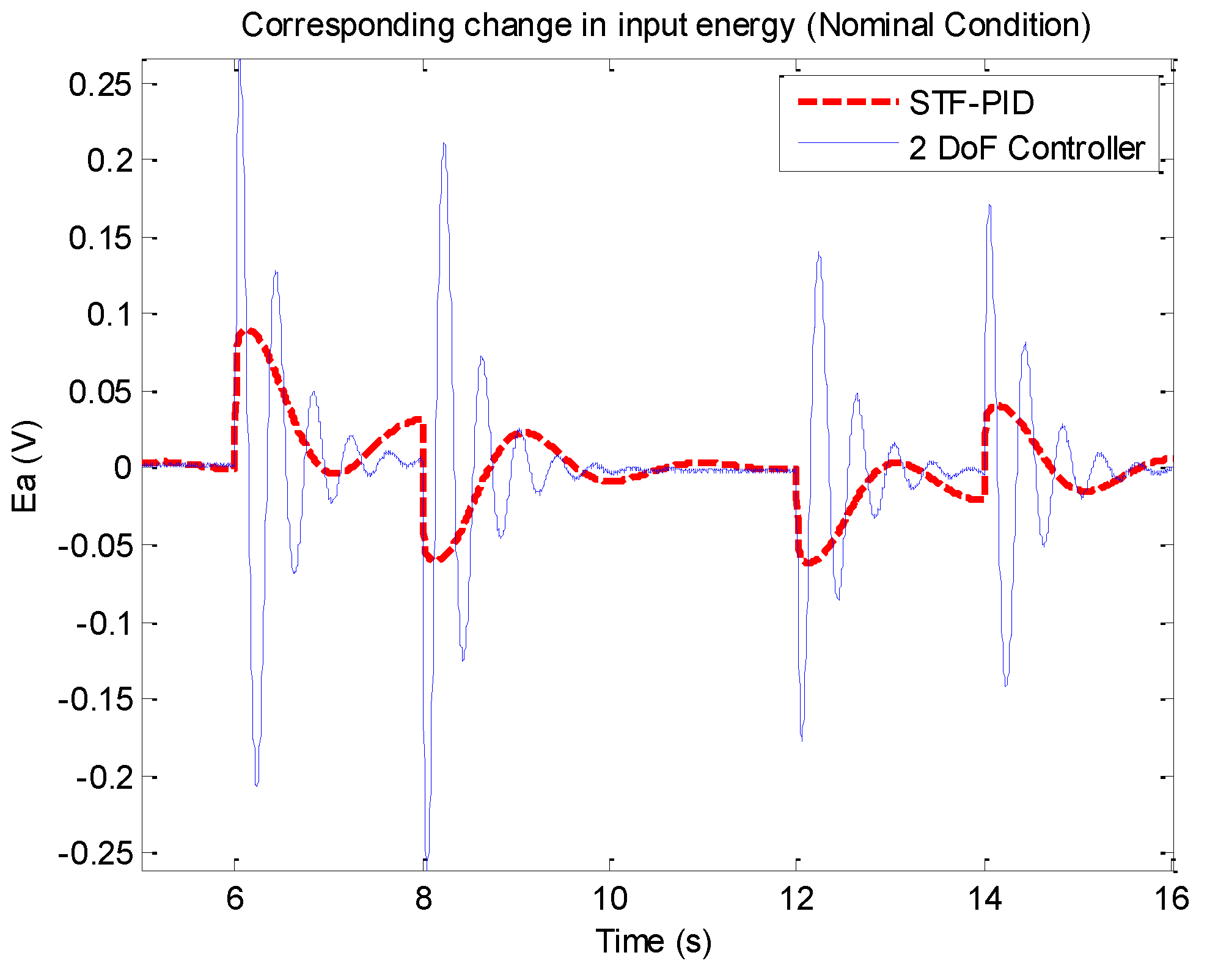
4. Simulation Results
Simulation of Optimal Based Robust Feedback Controller
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, T.; Zou, Y.; Liu, D.; Sun, F. Reinforcement Learning-Based Energy Management Strategy for a Hybrid Electric Tracked Vehicle. Energies 2015, 8, 7243–7260. [Google Scholar] [CrossRef]
- Fu, Z.; Gao, A.; Wang, X.; Song, X. Torque Split Strategy for Parallel Hybrid Electric Vehicles with an Integrated Starter Generator. Discret. Dyn. Nat. Soc. 2014, 2014. [Google Scholar] [CrossRef]
- He, H.; Sun, C.; Zhang, X. A Method for Identification of Driving Patterns in Hybrid Electric Vehicles Based on a LVQ Neural Network. Energies 2012, 5, 3363–3380. [Google Scholar]
- Moura, S.J.; Fathy, H.K.; Callaway, D.S.; Stein, J.L. A Stochastic Optimal Control Approach for Power Management in Plug-in Hybrid Electric Vehicles. IEEE Trans. Control Syst. Technol. 2011, 19, 545–555. [Google Scholar] [CrossRef]
- Assadian, F.; Fekri, S.; Hancock, M. Hybrid electric vehicles challenges: Strategies for advanced engine speed control. In Proceedings of the 2012 IEEE International Conference in Electric Vehicle (IEVC), Greenville, SC, USA, 4–8 March 2012; pp. 1–8.
- Yan, C.; Junmin, W. Adaptive Vehicle Speed Control With Input Injections for Longitudinal Motion Independent Road Frictional Condition Estimation. IEEE Trans. Veh. Technol. 2011, 60, 839–848. [Google Scholar]
- Vajedi, M.; Azad, N.L. Ecological Adaptive Cruise Controller for Plug-In Hybrid Electric Vehicles Using Nonlinear Model Predictive Control. IEEE Trans. Intell. Transp. Syst. 2015, 17, 113–122. [Google Scholar] [CrossRef]
- Yu, K.; Mukai, M.; Kawabe, T. Performance of an Eco-Driving Model Predictive Control System for HEVs during Car Following. Asian J. Control 2015, 7, 55–62. [Google Scholar] [CrossRef]
- Conatser, R.; Wagner, J.; Ganta, S.; Walker, I. Diagnosis of automotive electronic throttle control systems. Control Eng. Pract. 2004, 12, 23–30. [Google Scholar]
- Zulkifli, S.A.; Asirvadam, V.S.; Saad, N.; Aziz, A.R.A.; Mohideen, A.A.M. Implementation of electronic throttle-by-wire for a hybrid electric vehicle using National Instruments’ CompactRIO and LabVIEW Real-Time. In Proceedings of the 2014 5th International Conference in Intelligent and Advanced Systems (ICIAS), Kuala Lumpur, Malaysia, 3–5 June 2014; pp. 1–6.
- Shupeng, Z.; Yang, J.J.; Zhu, G.G. LPV Modeling and Mixed Constrained H2/Hinf Control of an Electronic Throttle. IEEE/ASME Trans. Mechatron. 2015, 20, 2120–2132. [Google Scholar]
- Yadav, A.; Gaur, P. Robust adaptive speed control of uncertain hybrid electric vehicle using electronic throttle control with varying road grade. Nonlinear Dyn. 2014, 76, 305–321. [Google Scholar]
- Li, Y.; Yang, B.; Zheng, T.; Li, Y. Extended State Observer Based Adaptive Back-Stepping Sliding Mode Control of Electronic Throttle in Transportation Cyber-Physical Systems. Math. Probl. Eng. 2015, 2015, 1–11. [Google Scholar]
- Yadav, A.K.; Gaur, P. Intelligent modified internal model control for speed control of nonlinear uncertain heavy duty vehicles. ISA Trans. 2015, 56, 288–298. [Google Scholar] [CrossRef] [PubMed]
- Chamsai, T.; Jirawattana, P.; Radpukdee, T. Robust Adaptive PID Controller for a Class of Uncertain Nonlinear Systems: An Application for Speed Tracking Control of an SI Engine. Math. Probl. Eng. 2015, 2015, 12. [Google Scholar] [CrossRef]
- Yadav, A.K.; Gaur, P.; Jha, S.K.; Gupta, J.R.P.; Mittal, A.P. Optimal Speed Control of Hybrid Electric Vehicles. J. Power Electron. 2011, 11, 393–400. [Google Scholar] [CrossRef]
- Bhiwani, R.J.; Patre, B.M. Stability analysis of fuzzy parametric uncertain systems. ISA Trans. 2011, 50, 538–547. [Google Scholar] [CrossRef] [PubMed]
- Tao, C.W.; Taur, J.S. Robust fuzzy control for a plant with fuzzy linear model. IEEE Trans. Fuzzy Syst. 2005, 13, 30–41. [Google Scholar] [CrossRef]
- Bhiwani, R.J.; Patre, B.M. Design of Robust PI/PID Controller for Fuzzy Parametric Uncertain Systems. Int. J. Fuzzy Syst. 2011, 13, 16–23. [Google Scholar]
- Patre, B.M.; Bhiwani, R.J. Robust controller design for fuzzy parametric uncertain systems: An optimal control approach. ISA Trans. 2013, 52, 184–191. [Google Scholar] [CrossRef] [PubMed]
- Barai, R.K.; Nonami, K. Optimal two-degree-of-freedom fuzzy control for locomotion control of a hydraulically actuated hexapod robot. Inf. Sci. 2007, 177, 1892–1915. [Google Scholar] [CrossRef]
- Harnefors, L.; Saarakkala, S.E.; Hinkkanen, M. Speed Control of Electrical Drives Using Classical Control Methods. IEEE Trans. Ind. Appl. 2013, 49, 889–898. [Google Scholar] [CrossRef]
- Nam, K.; Oh, S.; Fujimoto, H.; Hori, Y. Robust yaw stability control for electric vehicles based on active front steering control through a steer-by-wire system. Int. J. Automot. Technol. 2012, 13, 1169–1176. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ETCS | |||
|---|---|---|---|
| Descriptions | Symbol | Nominal Value (SI unit) | Uncertainty Bounds |
| Armature resistance | 2 | [1.5,2.5] | |
| Armature inductance | 0.003 H | [0.002,0.004] | |
| Back electromotive force (EMF) constant | 0.11 Vs/rad | [0.07,0.15] | |
| Gear ratio | 4 | [2,6] | |
| Motor torque constant | 0.1 N m/A | [0.08,0.12] | |
| Throttle spring constant | 0.4 N ms/rad | [0.3,0.5] | |
| Equivalent inertia | 0.021 kg | [0.009,0.0502] | |
| Damping constant | 0.482 N ms/rad | [0.082,1.443] | |
| Vehicle Dynamic Model | |||
| Descriptions | Symbol | Nominal Value (SI unit) | Uncertainty Bounds |
| Vehicle mass | 1000 kg | [750,1250] | |
| Drag coefficient | 0.48 N/ | [0.4,0.56] | |
| Engine force coefficient | 12500 N | [10000,15000] | |
| Engine idle force | 6400 N | [5500,7300] | |
| Engine time constancy | 0.5 s | [0.2,0.8] | |
| Bearing damping coefficient | 0.035 N ms/rad | [0.03,0.04] | |
| Radius of tire | 70 mm | [50,90] | |
| Friction coefficient | 0.011 | [0.01,0.012] | |
| Road slope/grade | Variable | [] | |
| Error | NB | N | Z | P | PB |
|---|---|---|---|---|---|
| Change in Error | |||||
| NB | S | S | MS | MS | M |
| N | S | MS | MS | M | MB |
| Z | MS | MS | M | MB | MB |
| P | MS | M | MB | MB | B |
| PB | M | MB | MB | B | B |
| Controller | Condition | OS (%) | RT (s) | DT (s) | ST (s) |
|---|---|---|---|---|---|
| controller | Nominal | 1.369 | 1.59 | 0.63 | 2.17 |
| Lower Bound | 0 | 2.86 | 0.2 | 5.27 | |
| Upper Bound | 25.13 | 1.92 | 1.13 | 8.99 | |
| Proposed feedback controller | Nominal | 0 | 1.7 | 0.61 | 2.8 |
| Lower Bound | 13.37 | 0.31 | 0.24 | 0.72 | |
| Upper Bound | 0 | 5.27 | 1.67 | 8.77 |
| IAE | ISE | |||||
|---|---|---|---|---|---|---|
| Controller | Nominal | Lower | Upper | Nominal | Lower | Upper |
| STF-PID | 13.58 | 12.94 | 13.27 | 86.80 | 68.77 | 88.18 |
| 2-DoF controller | 7.35 | 6.59 | 8.15 | 44.59 | 49.07 | 45.84 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perng, J.-W.; Lai, Y.-H. Robust Longitudinal Speed Control of Hybrid Electric Vehicles with a Two-Degree-of-Freedom Fuzzy Logic Controller. Energies 2016, 9, 290. https://doi.org/10.3390/en9040290
Perng J-W, Lai Y-H. Robust Longitudinal Speed Control of Hybrid Electric Vehicles with a Two-Degree-of-Freedom Fuzzy Logic Controller. Energies. 2016; 9(4):290. https://doi.org/10.3390/en9040290
Chicago/Turabian StylePerng, Jau-Woei, and Yi-Horng Lai. 2016. "Robust Longitudinal Speed Control of Hybrid Electric Vehicles with a Two-Degree-of-Freedom Fuzzy Logic Controller" Energies 9, no. 4: 290. https://doi.org/10.3390/en9040290
APA StylePerng, J. -W., & Lai, Y. -H. (2016). Robust Longitudinal Speed Control of Hybrid Electric Vehicles with a Two-Degree-of-Freedom Fuzzy Logic Controller. Energies, 9(4), 290. https://doi.org/10.3390/en9040290