
A Novel Neural Network Vector Control for Single-Phase Grid-Connected Converters with L, LC and LCL Filters


Abstract
:1. Introduction
2. Conventional Vector Control
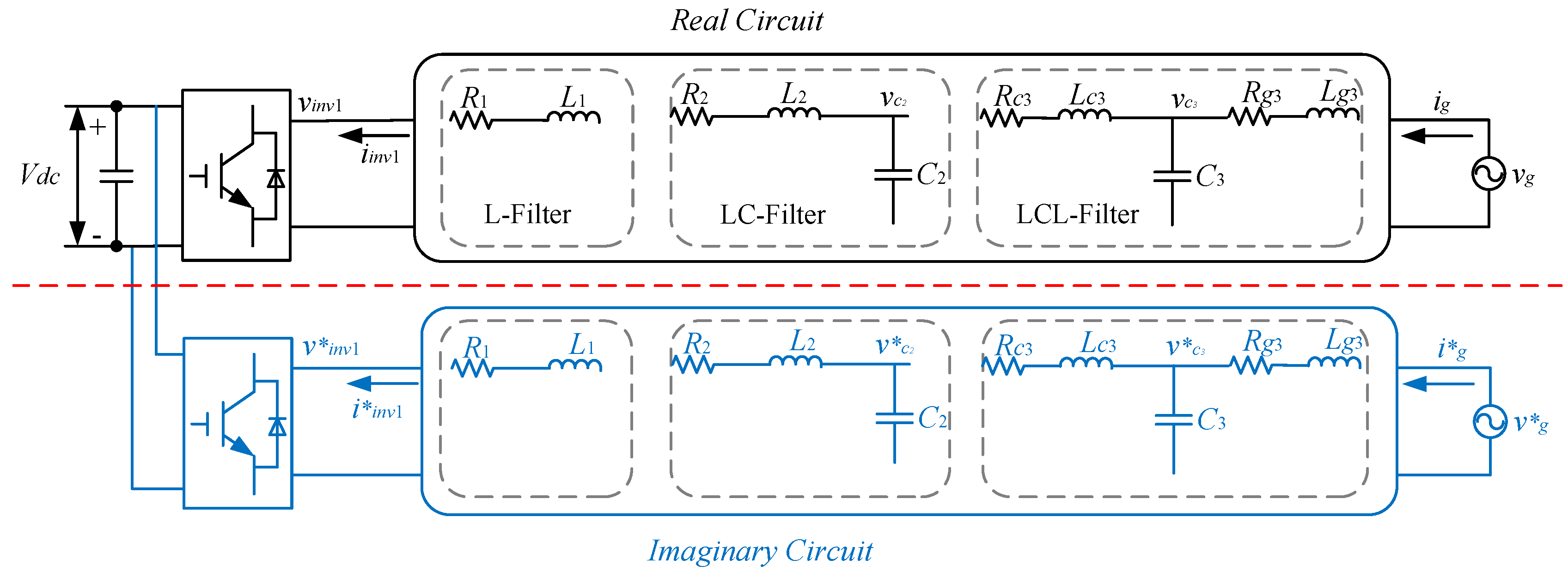
2.1. Single-Phase GCC
2.2. Imaginary Circuit
2.3. Mathematical Model in the d-q Frame
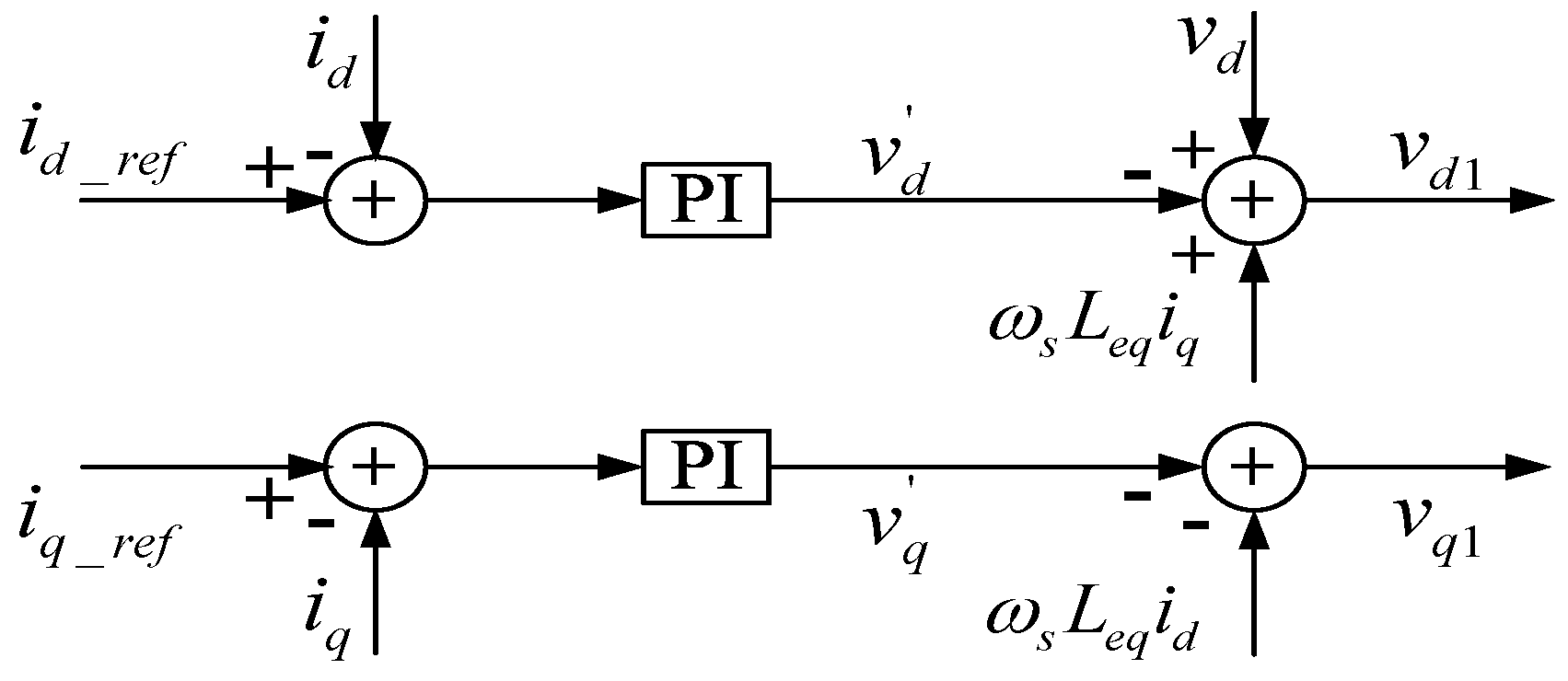
2.4. Conventional Decoupled Vector Control
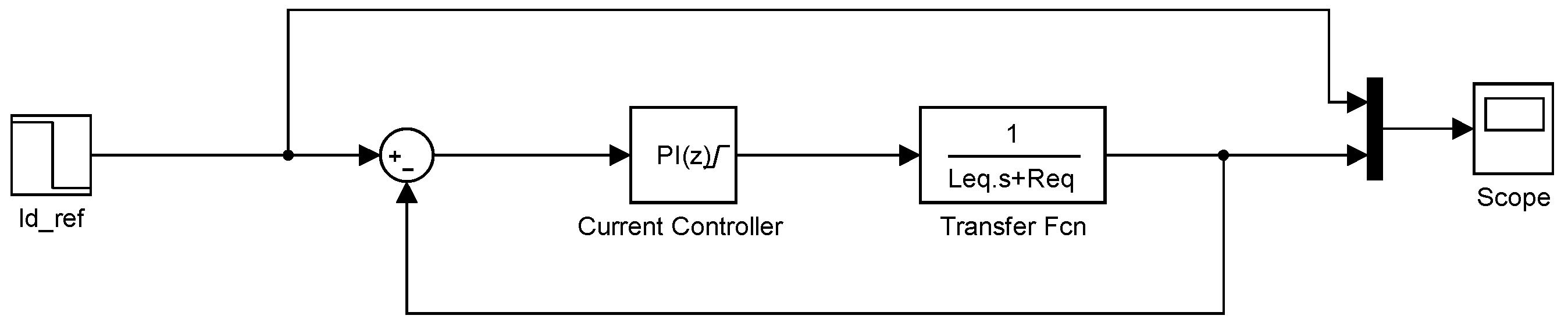
2.4.1. The Single-Phase L Filter GCC
2.4.2. The Single-Phase LC Filter and LCL Filter GCC
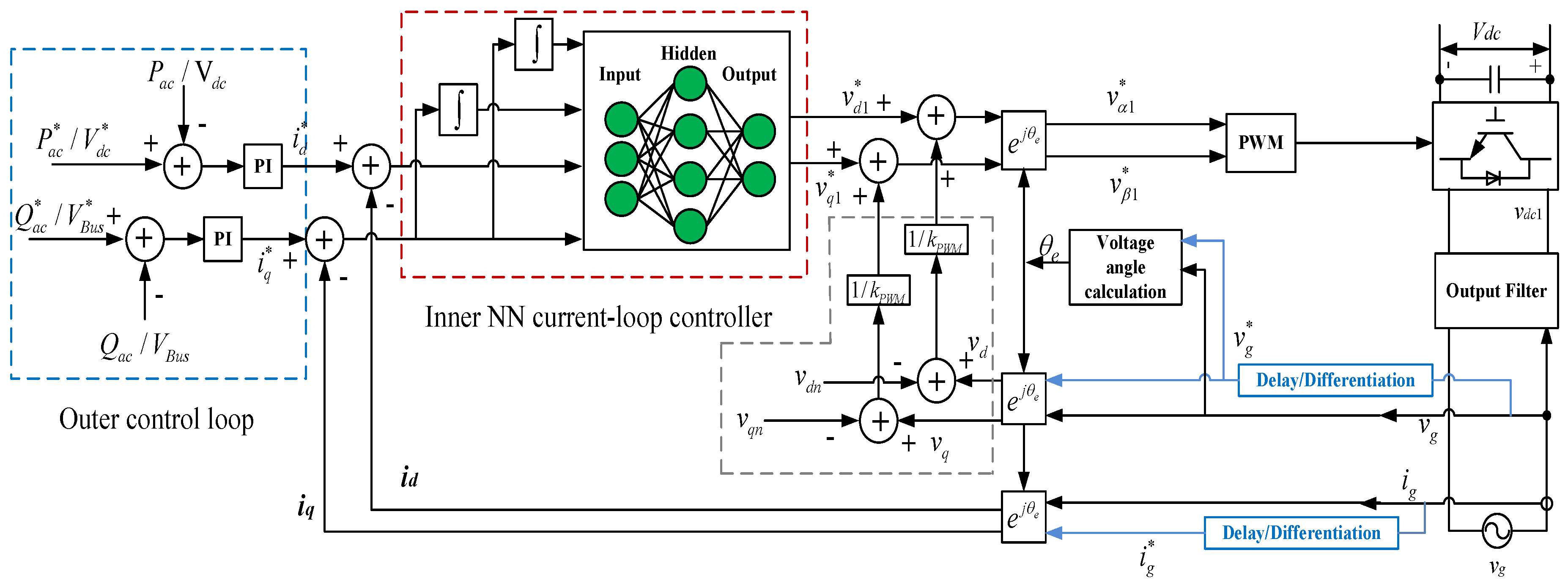
3. Novel Neural Network Vector Control
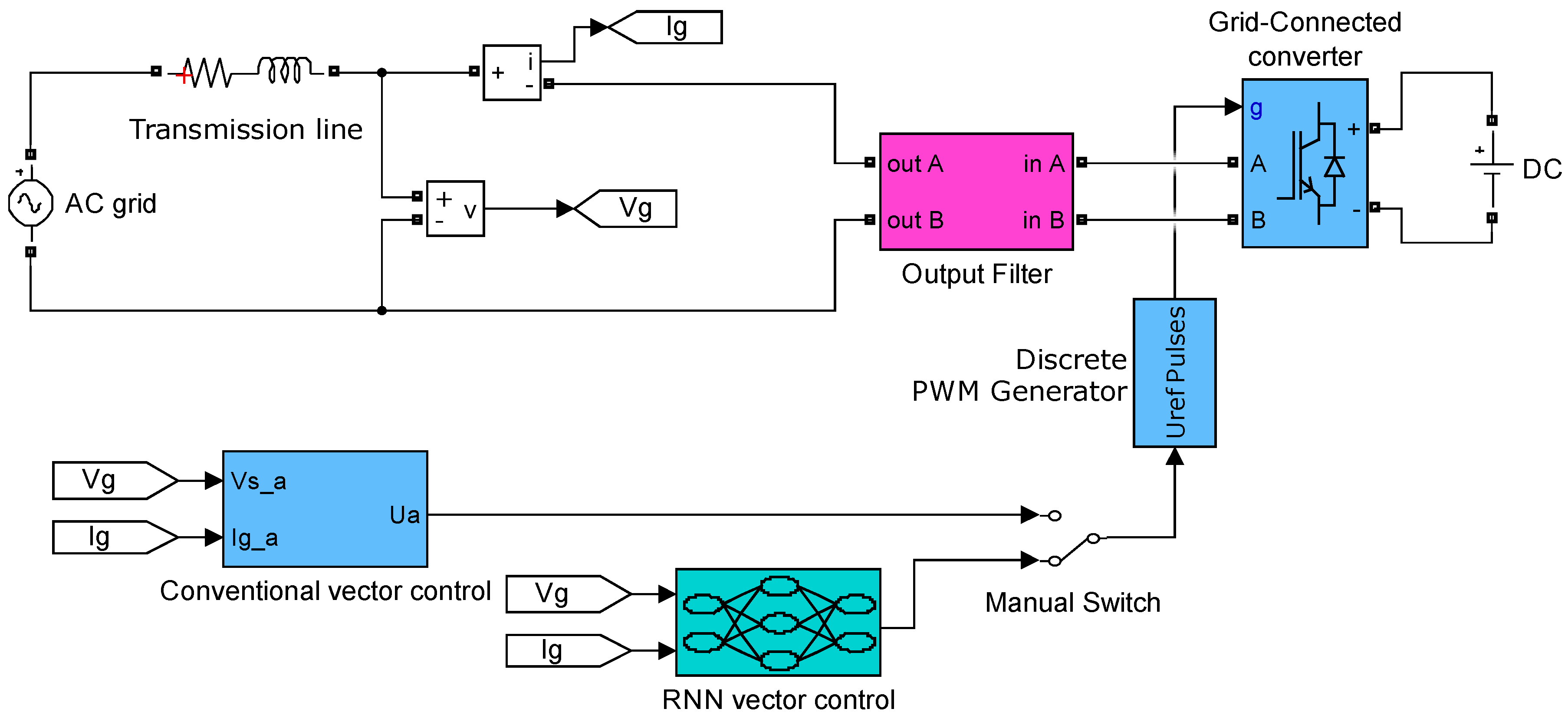
3.1. Neural Network Vector Control Architecture
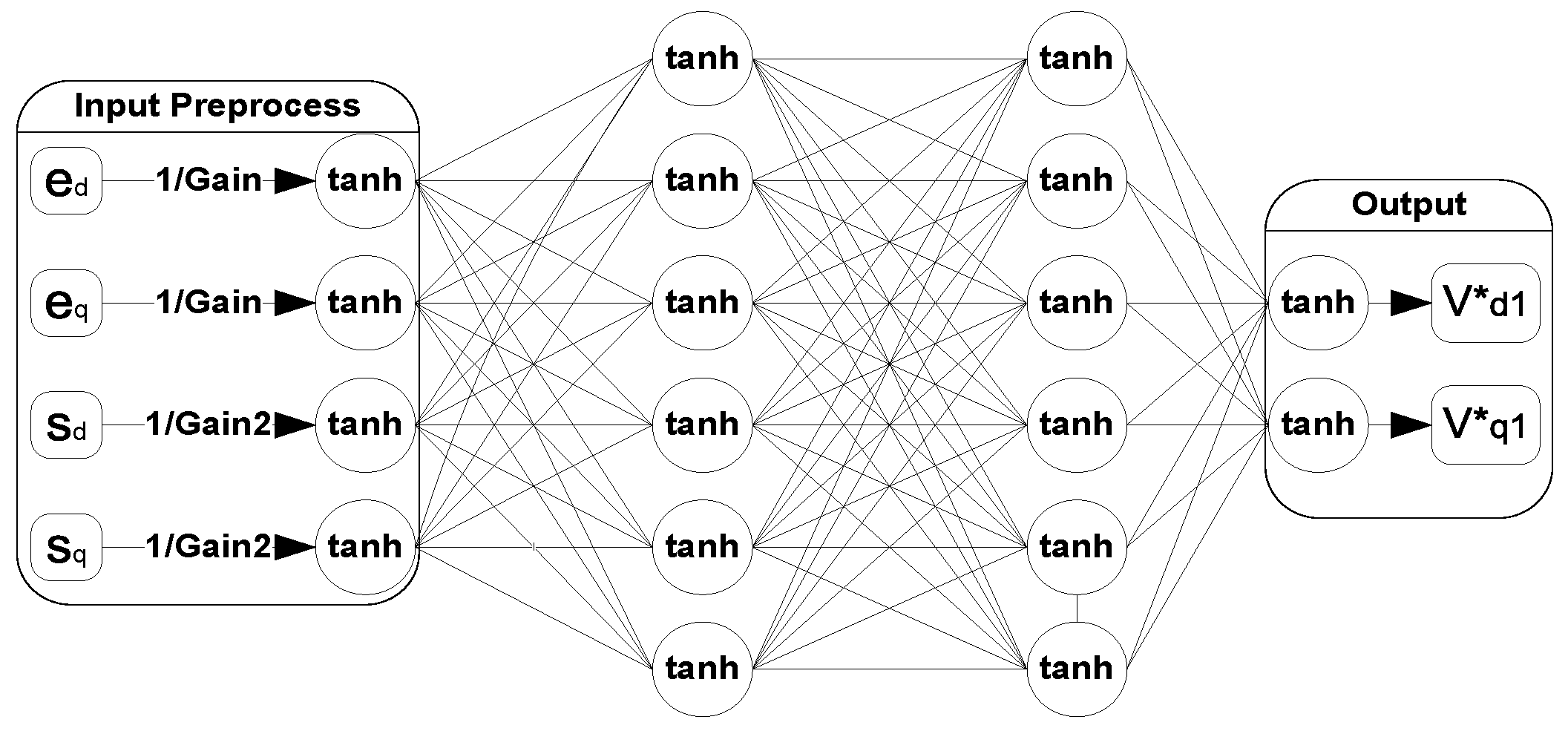
3.2. Neural Network Controller Structure
4. Training Neural Network Controller
4.1. Training Objective: Approximate Optimal Control
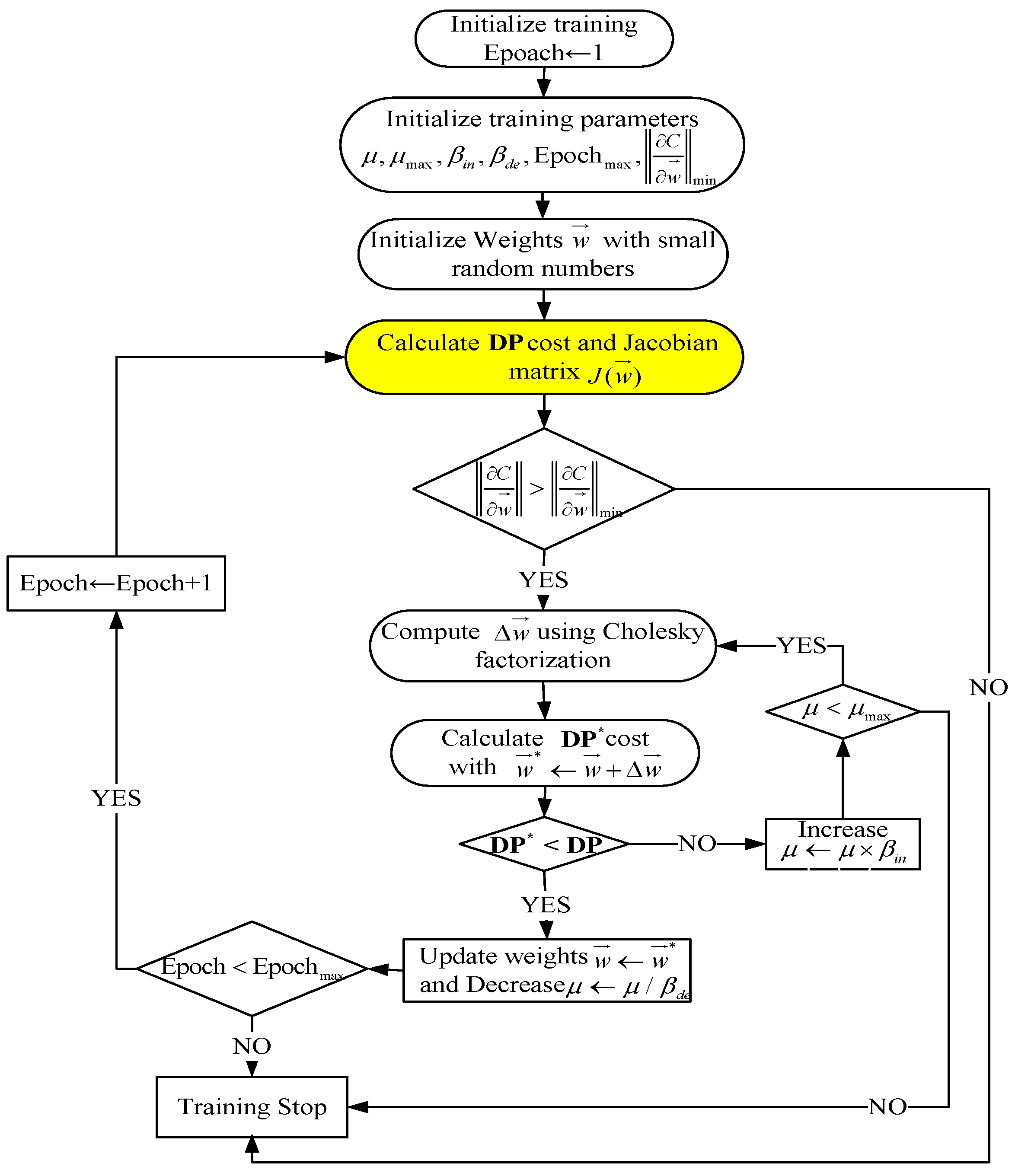
4.2. NN Training Algorithm: Levenberg–Marquardt
4.3. Training Implementation
5. Performance Evaluation
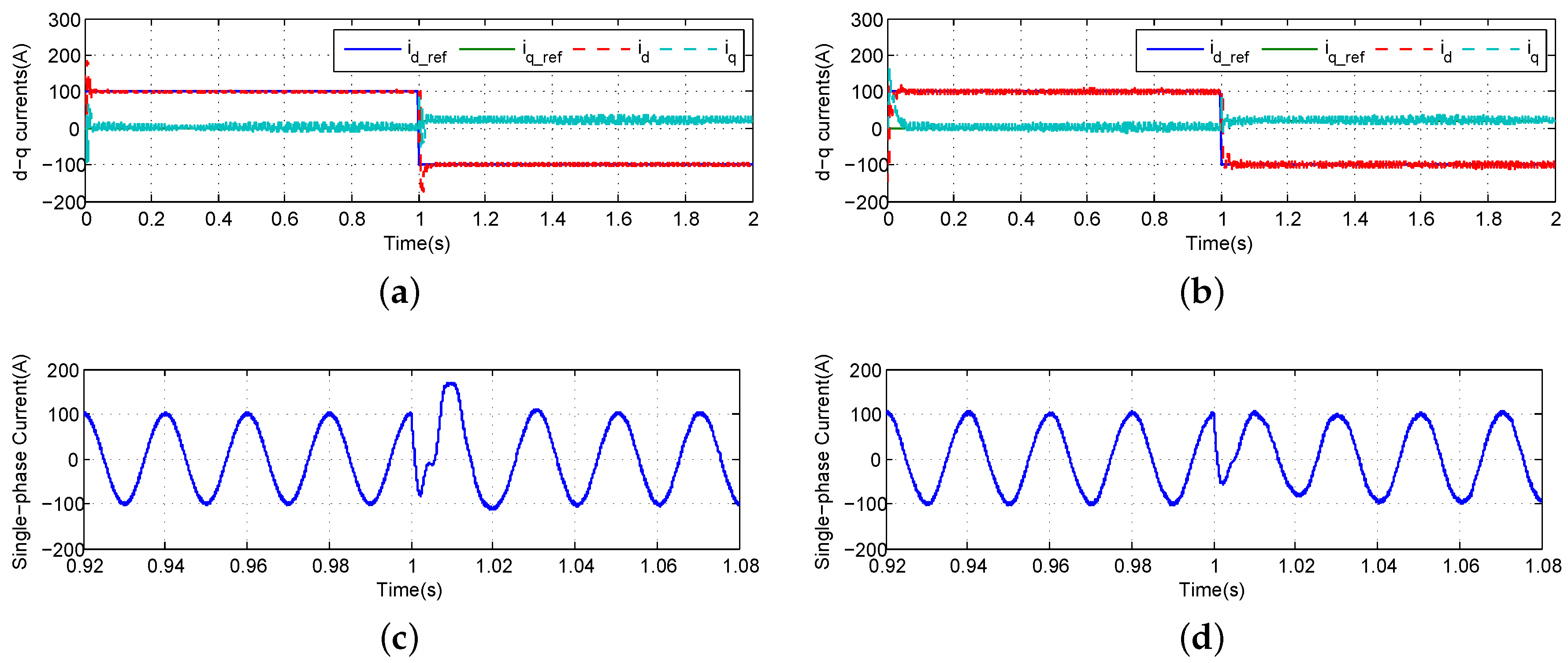
5.1. L Filter-Based GCC
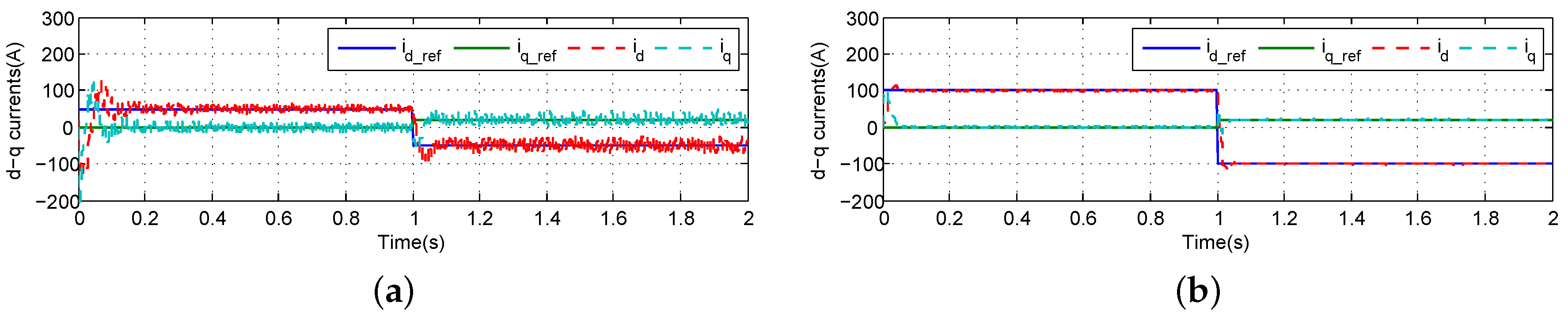
5.2. LC Filter-Based GCC
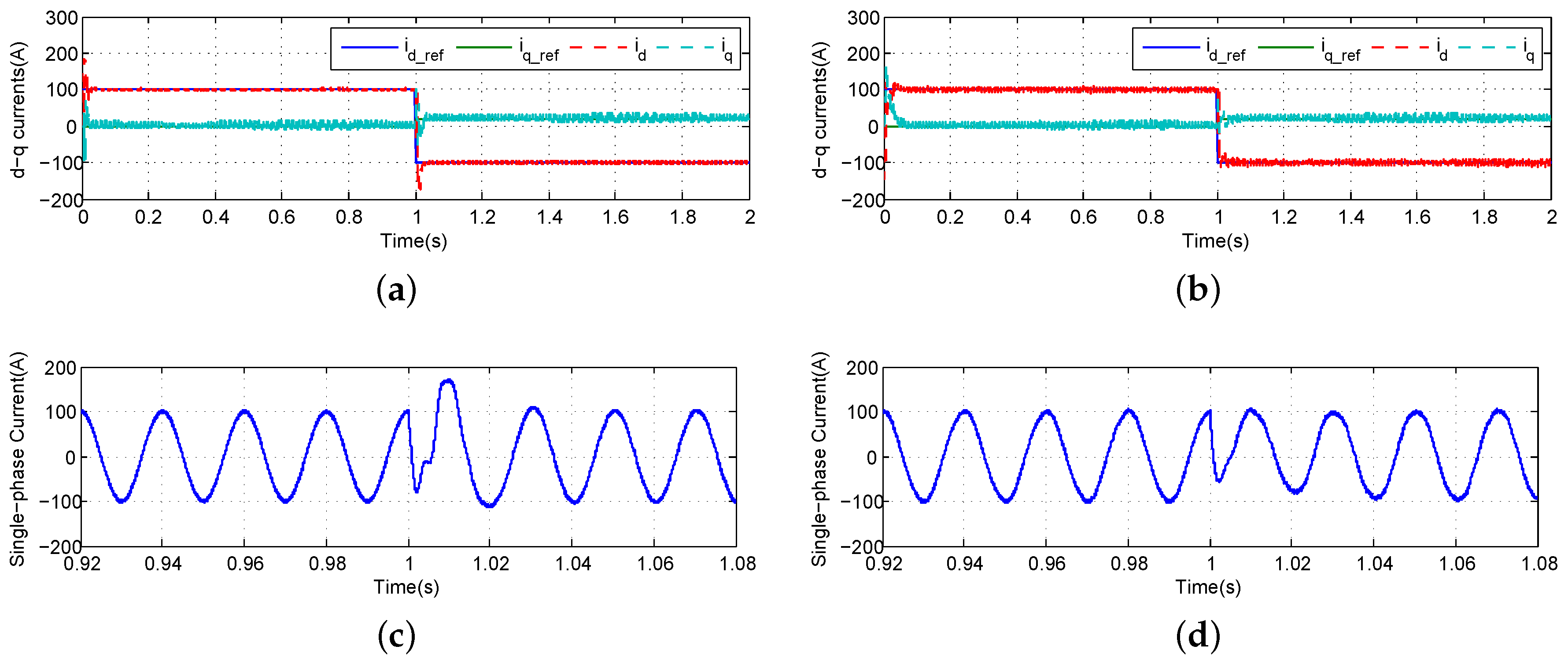
5.3. LCL Filter-Based GCC
6. Hardware Experiment Validation
6.1. Experiment Setup
6.2. Experiment Results
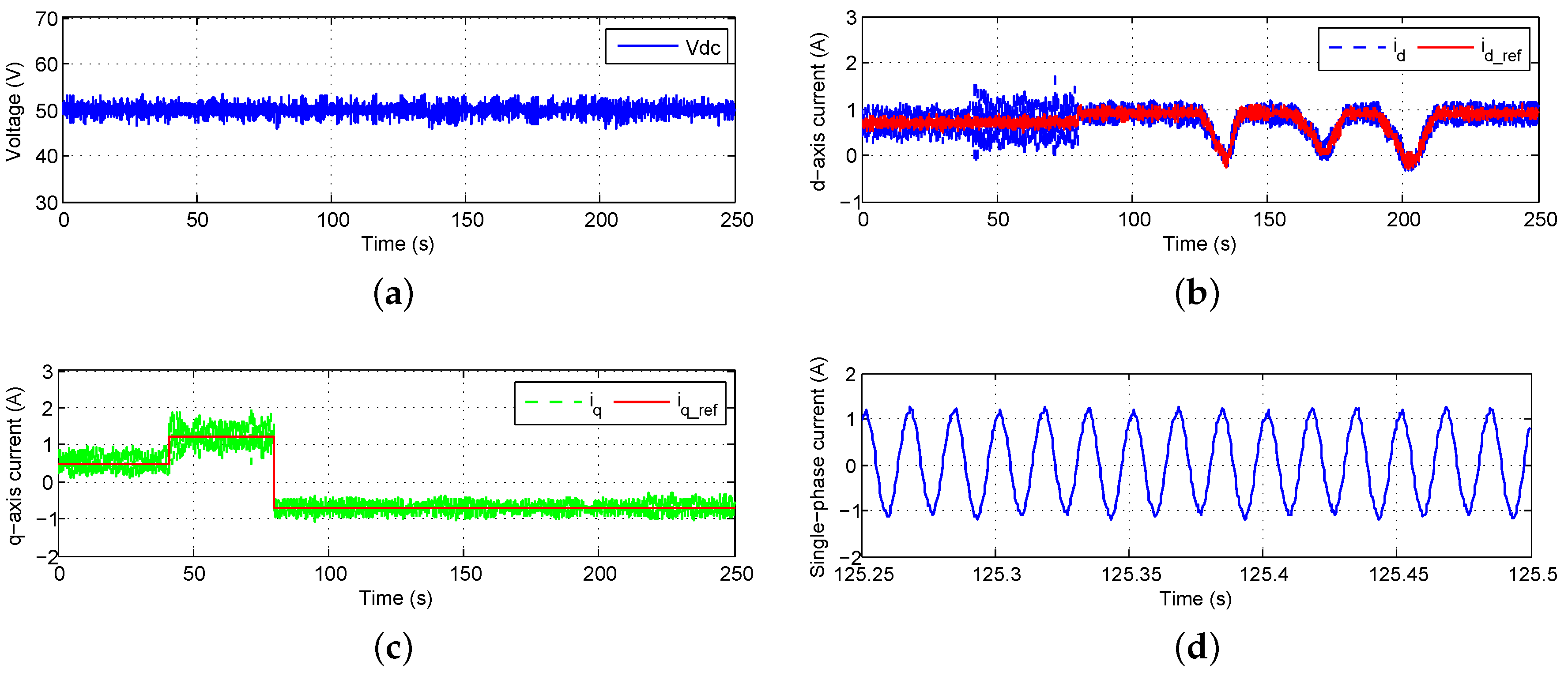
6.2.1. L Filter-Based GCC
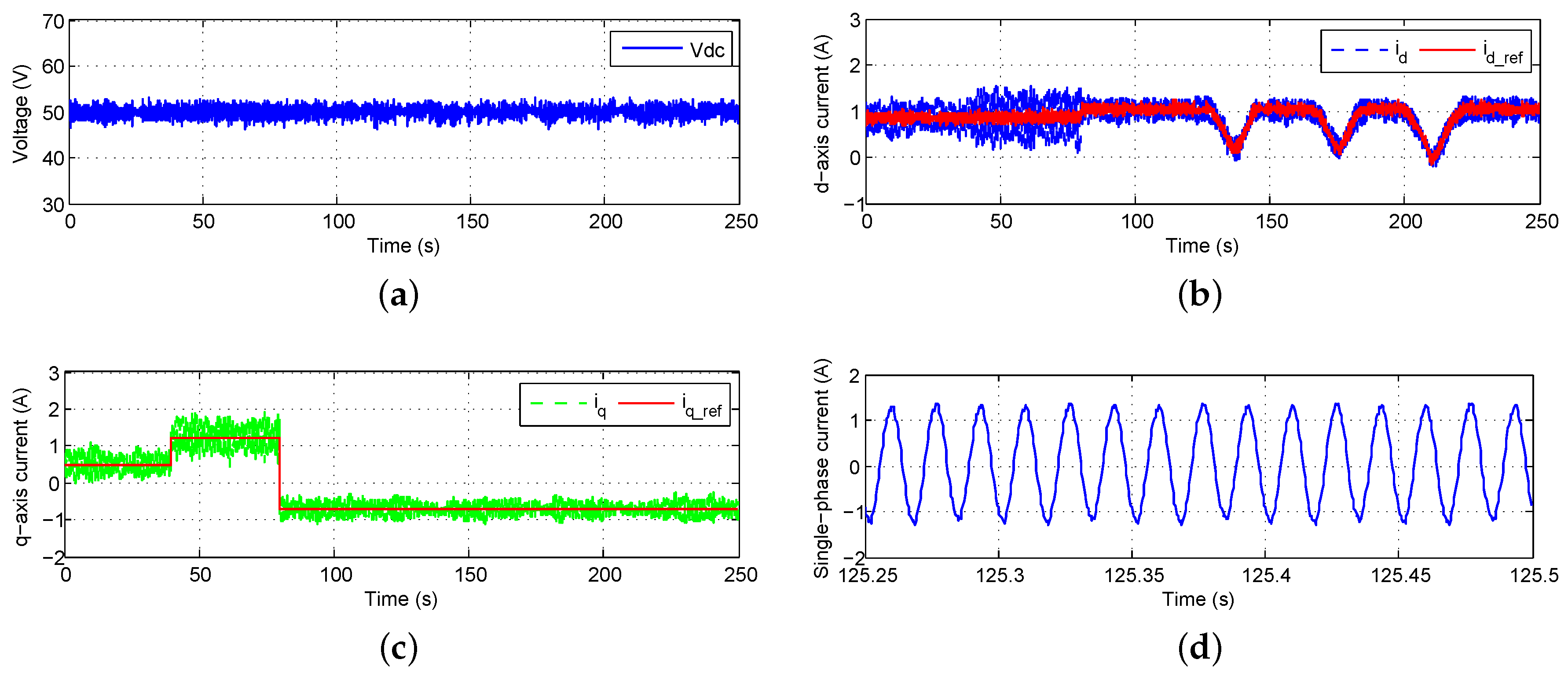
6.2.2. LC Filter-Based GCC
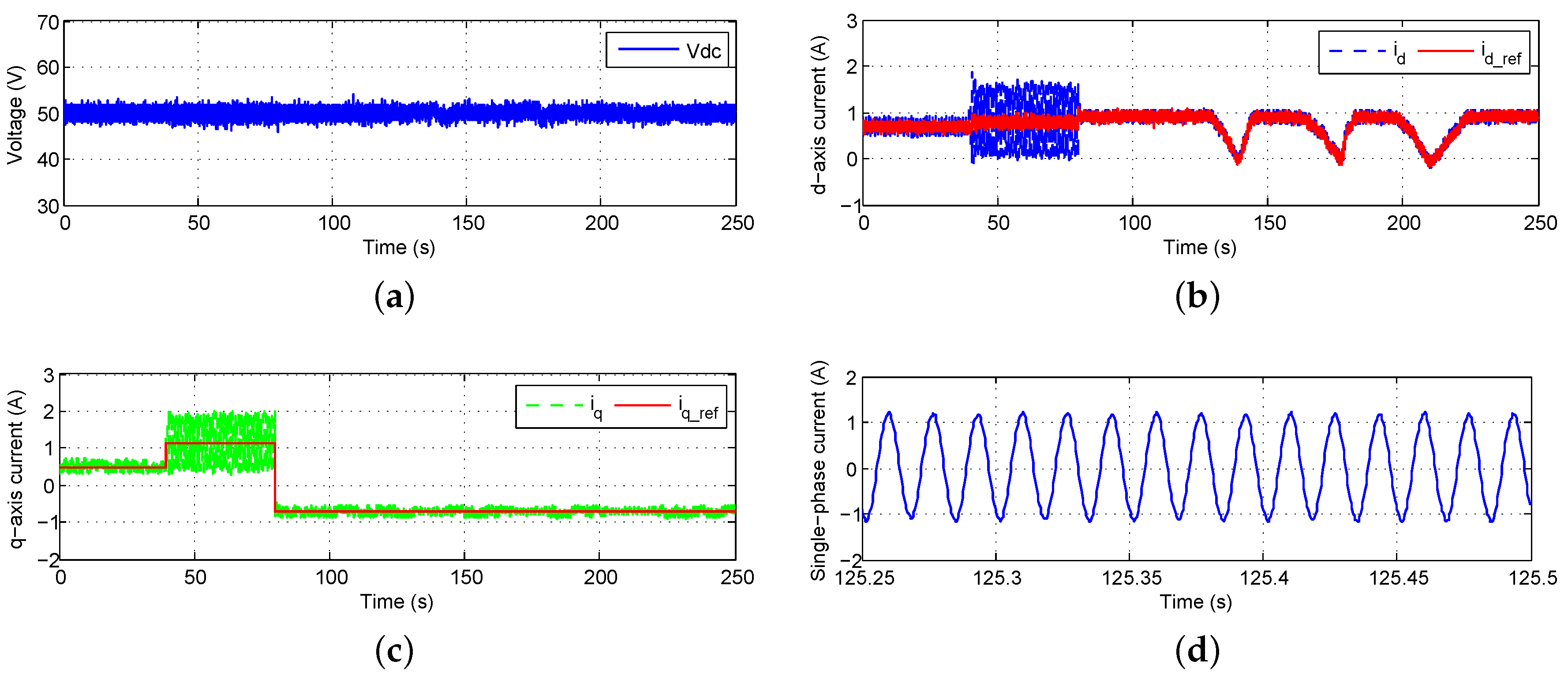
6.2.3. LCL Filter-Based GCC
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Senturk, O.S.; Helle, L.; Munk-Nielsen, S.; Rodriguez, P.; Teodorescu, R. Power Capability Investigation Based on Electrothermal Models of Press-Pack IGBT Three-Level NPC and ANPC VSCs for Multimegawatt Wind Turbines. IEEE Trans. Power Electron. 2012, 27, 3195–3206. [Google Scholar] [CrossRef]
- Wu, W.; Sun, Y.; Lin, Z.; Tang, T.; Blaabjerg, F.; Chung, H.S. A New LCL-Filter With In-Series Parallel Resonant Circuit for Single-Phase Grid-Tied Inverter. IEEE Trans. Ind. Electron. 2014, 61, 4640–4644. [Google Scholar] [CrossRef]
- Kjaer, S.B.; Pedersen, J.K.; Blaabjerg, F. Linear Current Control Scheme With Series Resonant Harmonic Compensator for Single-Phase Grid-Connected Photovoltaic Inverters. IEEE Trans. Ind. Electron. 2008, 55, 1292–1306. [Google Scholar]
- Hornik, T.; Zhong, Q.C. A Current-Control Strategy for Voltage-Source Inverters in Microgrids Based on H∞ and Repetitive Control. IEEE Trans. Power Electron. 2011, 26, 943–952. [Google Scholar] [CrossRef]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL filter-based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Blasko, V.; Kaura, V. A Novel Control to Actively Damp Resonance in Input LC Filter of a Three-Phase Voltage Source Converter. IEEE Trans. Ind. Appl. 1997, 33, 542–550. [Google Scholar] [CrossRef]
- Zhang, R.; Cardinal, M.; Szczesny, P.; Dame, M. A grid simulator with control of single-phase power converters in D-Q rotating frame. In Proceedings of the IEEE Power Electronics Specialists Conference, Cairns, QLD, Australia, 23–27 June 2002; pp. 1431–1436.
- Roshan, A.; Burgos, R.; Baisden, A.C.; Wang, F.; Boroyevich, D. A D-Q Frame Controller for a Full-Bridge Single Phase Inverter Used in Small Distributed Power Generation Systems. In Proceedings of the IEEE Applied Power Electronics Conference, Anaheim, CA, USA, 25 February–1 March 2007; pp. 641–647.
- Bahrani, B.; Rufer, A.; Kenzelmann, S.; Lopes, L.A.C. Vector Control of Single-Phase Voltage-Source Converters Based on Fictive-Axis Emulation. IEEE Trans. Ind. Appl. 2011, 47, 831–840. [Google Scholar] [CrossRef]
- Dannehl, J.; Wessels, C.; Fuchs, F.W. Limitations of Voltage-Oriented PI Current Control of Grid-Connected PWM Rectifiers With LCL Filters. IEEE Trans. Ind. Electron. 2009, 56, 380–388. [Google Scholar] [CrossRef]
- Saitou, M.; Shimizu, T. Generalized Theory of Instantaneous Active and Reactive Powers in Single-phase Circuits based on Hilbert Transform. In Proceedings of the Power Electronics Specialists Conference, Cairns, QLD, Australia, 23–27 June 2002; pp. 1419–1424.
- Khadkikar, V.; Chandra, A.; Singh, B.N. Generalised single-phase p-q theory for active power filtering: Simulation and DSP-based experimental investigation. IET Power Electron. 2009, 2, 67–78. [Google Scholar] [CrossRef]
- Dasgupta, S.; Sahoo, S.K.; Panda, S.K. Single-Phase Inverter Control Techniques for Interfacing Renewable Energy Sources With Microgrid-Part I: Parallel-Connected Inverter Topology With Active and Reactive Power Flow Control Along With Grid Current Shaping. IEEE Trans. Power Electron. 2011, 26, 717–731. [Google Scholar] [CrossRef]
- Dasgupta, S.; Sahoo, S.K.; Panda, S.K. Single-Phase Inverter Control Techniques for Interfacing Renewable Energy Sources With Microgrid-Part II: Series-Connected Inverter Topology to Mitigate Voltage-Related Problems Along With Active Power Flow Control. IEEE Trans. Power Electron. 2011, 26, 732–746. [Google Scholar] [CrossRef]
- Czarnecki, L.S. Comparison of instantaneous reactive power p-q theory with theory of the current’s physical components. Electr. Eng. 2003, 85, 21–28. [Google Scholar]
- Czarnecki, L.S. Instantaneous Reactive Power p-q Theory and Power Properties of Three-Phase Systems. IEEE Trans. Power Deliv. 2006, 21, 362–367. [Google Scholar] [CrossRef]
- Dasgupta, S.; Sahoo, S.K.; Panda, S.K. A Robust Predictive Current Control for Three-Phase Grid-Connected Inverters. IEEE Trans. Ind. Electron. 2009, 56, 1993–2004. [Google Scholar]
- Zhang, N.; Tang, H.; Yao, C. A Systematic Method for Designing a PR Controller and Active Damping of the LCL Filter for Single-Phase Grid-Connected PV Inverters. Energies 2014, 7, 3934–3954. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Doval-Gandoy, J. On the discrete-time implementation of resonant controllers for active power filters. In Proceedings of the 35th Annual Conference IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 3686–3691.
- Abrishamifar, A.; Ahmad, A.A.; Mohamadian, M. Fixed Switching Frequency Sliding Mode Control for Single-Phase Unipolar Inverters. IEEE Trans. Power Electron. 2012, 27, 2507–2514. [Google Scholar] [CrossRef]
- Komurcugil, H.; Ozdemir, S.; Sefa, I.; Altin, N.; Kukrer, O. Sliding-Mode Control for Single-Phase Grid-Connected LCL-Filtered VSI With Double-Band Hysteresis Scheme. IEEE Trans. Ind. Electron. 2016, 63, 864–873. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W. A Sliding-Mode Controller With Multiresonant Sliding Surface for Single-Phase Grid-Connected VSI With an LCL Filter. IEEE Trans. Power Electron. 2013, 28, 2259–2268. [Google Scholar] [CrossRef]
- Bellman, R.E. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Balakrishnan, S.N.; Biega, V. Adaptive-Critic-Based Neural Networks for Aircraft Optimal Control. J. Guid. Control Dyn. 1996, 19, 893–898. [Google Scholar] [CrossRef]
- Prokhorov, D.V.; Wunsch, D.C. Adaptive Critic Designs. IEEE Trans. Neural Netw. 1997, 8, 997–1007. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Zhang, H.; Liu, D. Adaptive dynamic programming: An introduction. IEEE Comput. Intell. Mag. 2009, 4, 39–47. [Google Scholar] [CrossRef]
- Venayagamoorthy, G.K.; Harley, R.G.; Wunsch, D.C. Comparison of Heuristic Dynamic Programming and Dual Heuristic Programming Adaptive Critics for Neurocontrol of a Turbogenerator. IEEE Trans. Neural Netw. 2002, 13, 764–773. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Fairbank, M.; Wunsch, D.C.; Alonso, E. Vector Control of a Grid-Connected Rectifier/Inverter Using an Artificial Neural Network. In Proceedings of the IEEE World Congress on Computational Intelligence, Brisbane, Australia, 10–15 June 2012; pp. 1–7.
- Li, S.; Fairbank, M.; Johnson, C.; Wunsch, D.C.; Alonso, E.; Proaño, J.L. Artificial Neural Networks for Control of a Grid-Connected Rectifier/Inverter Under Disturbance, Dynamic and Power Converter Switching Conditions. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 738–750. [Google Scholar] [PubMed]
- Fu, X.; Li, S.; Jaithwa, I. Implement Optimal Vector Control for LCL-Filter-Based Grid-Connected Converters by Using Recurrent Neural Networks. IEEE Trans. Ind. Electron. 2015, 62, 4443–4454. [Google Scholar] [CrossRef]
- Fu, X.; Li, S. Control of Single-Phase Grid-Connected Converters with LCL Filters Using Recurrent Neural Network and Conventional Control Methods. IEEE Trans. Power Electron. 2016, 31, 5354–5364. [Google Scholar] [CrossRef]
- Lettl, J.; Bauer, J.; Linhart, L. Comparison of Different Filter Types for Grid Connected Inverter. In Proceedings of the Progress In Electromagnetics Research Symposium (PIERS), Marrakesh, Morocco, 20–23 March 2011; pp. 1426–1429.
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley and Sons: Chichester, UK, 2011. [Google Scholar]
- Li, S.; Haskew, T.A.; Hong, Y.K.; Xu, L. Direct-current vector control of three-phase grid-connected rectifier–inverter. Electr. Power Syst. Res. 2011, 81, 357–366. [Google Scholar] [CrossRef]
- Rocabert, J.; Azevedo, G.M.S.; Luna, A.; Guerrero, J.M.; Candela, J.I.; Rodriguez, P. Intelligent Connection Agent for Three-Phase Grid-Connected Microgrids. IEEE Trans. Power Electron. 2011, 26, 2993–3005. [Google Scholar] [CrossRef]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H. Neural Network Design; PWS Publishing: Boston, MA, USA, 2002. [Google Scholar]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications, and Design, 3rd ed.; John Wiley and Sons: Chichester, UK, 2002. [Google Scholar]
- Hagan, M.T.; Menhaj, M.B. Training Feedforward Networks with the Marquardt Algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Fu, X.; Li, S.; Fairbank, M.; Wunsch, D.C.; Alonso, E. Training Recurrent Neural Networks with the Levenberg-Marquardt Algorithm for Optimal Control of a Grid-Connected Converter. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1900–1912. [Google Scholar] [CrossRef] [PubMed]
- Levenberg, K. A method for the solution of certain non-linear problems in least squares. Q. J. Appl. Math. 1994, 2, 164–168. [Google Scholar]
- Marquardt, D.W. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Press, W.H.; Flannery, B.P.; Teukolsky, S.A.; Vetterling, W.T. Numerical Recipes in C: The Art of Scientific Computing; Cambridge University Press: New York, NY, USA, 1992. [Google Scholar]
- Castilla, M.; Miret, J.; Matas, J.; De Vicuña, L.G.; Guerrero, J.M. A Review of Single-Phase Grid-Connected Inverters for Photovoltaic Modules. IEEE Trans. Ind. Appl. 2005, 41, 4492–4501. [Google Scholar]
- Castilla, M.; Miret, J.; Matas, J.; De Vicuña, L.G.; Guerrero, J.M. Control Design Guidelines for Single-Phase Grid-Connected Photovoltaic Inverters With Damped Resonant Harmonic Compensators. IEEE Trans. Ind. Electron. 2009, 56, 4492–4501. [Google Scholar] [CrossRef]
- Peña-Alzola, R.; Liserre, M.; Blaabjerg, F.; Sebastián, R.; Dannehl, J.; Fuchs, F.W. Analysis of the Passive Damping Losses in LCL-Filter-Based Grid Converters. IEEE Trans. Power Electron. 2013, 28, 2642–2646. [Google Scholar] [CrossRef]
- Jalili, K.; Bernet, S. Design of LCL filters of active-front-end two level voltage-source converters. IEEE Trans. Ind. Electron. 2009, 56, 1674–1689. [Google Scholar] [CrossRef]
- Festo Didactic Inc. Available online: https://www.labvolt.com/ (accessed on 12 February 2016).
- dSPACE Inc. Available online: http://www.dspace.com/ (accessed on 12 February 2016).
- Mullane, A.; Lightbody, G.; Yacamini, R. Wind-Turbine Fault Ride-Through Enhancement. IEEE Trans. Power Syst. 2005, 20, 1929–1937. [Google Scholar] [CrossRef]
- Luo, A.; Tang, C.; Shuai, Z.; Tang, J.; Xu, X.Y.; Chen, D. Fuzzy-PI-Based Direct-Output-Voltage Control Strategy for the STATCOM Used in Utility Distribution Systems. IEEE Trans. Ind. Electron. 2009, 56, 2401–2411. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value | Unit |
|---|---|---|---|
| nominal grid voltage (rms) | 230 | V | |
| f | nominal grid frequency | 50 | Hz |
| DC-link voltage | 500 | V | |
| L filter inductor | 2.14 | mH | |
| L filter resistor | 0.19 | Ω | |
| LC filter inductor | 2.14 | mH | |
| LC filter resistor | 0.19 | Ω | |
| LC filter parallel capacitor | 20 | F | |
| & | LCL filter inductor | 1.07 | mH |
| & | LCL filter resistor | 0.095 | Ω |
| LCL filter parallel capacitor | 20 | F |
| Symbol | Quantity | Value | Unit |
|---|---|---|---|
| nominal grid voltage (rms) | 20 | V | |
| f | nominal grid frequency | 60 | Hz |
| DC-link reference voltage | 50 | V | |
| DC-link capacitance | 3260 | F | |
| L filter inductor | 25 | mH | |
| L filter resistor | 0.25 | Ω | |
| LC filter inductor | 25 | mH | |
| LC filter resistor | 0.25 | Ω | |
| LC filter parallel capacitor | 2.2 | F | |
| LC-filter capacitor internal resistance | 3 | Ω | |
| & | LCL filter converter-side inductor | 12.5 | mH |
| & | LCL filter converter-side resistor | 0.125 | Ω |
| LCL filter parallel capacitor | 2.2 | F | |
| LCL filter capacitor internal resistance | 3 | Ω | |
| damping resistor for the LCL filter | 22 | Ω |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, X.; Li, S. A Novel Neural Network Vector Control for Single-Phase Grid-Connected Converters with L, LC and LCL Filters. Energies 2016, 9, 328. https://doi.org/10.3390/en9050328
Fu X, Li S. A Novel Neural Network Vector Control for Single-Phase Grid-Connected Converters with L, LC and LCL Filters. Energies. 2016; 9(5):328. https://doi.org/10.3390/en9050328
Chicago/Turabian StyleFu, Xingang, and Shuhui Li. 2016. "A Novel Neural Network Vector Control for Single-Phase Grid-Connected Converters with L, LC and LCL Filters" Energies 9, no. 5: 328. https://doi.org/10.3390/en9050328
APA StyleFu, X., & Li, S. (2016). A Novel Neural Network Vector Control for Single-Phase Grid-Connected Converters with L, LC and LCL Filters. Energies, 9(5), 328. https://doi.org/10.3390/en9050328