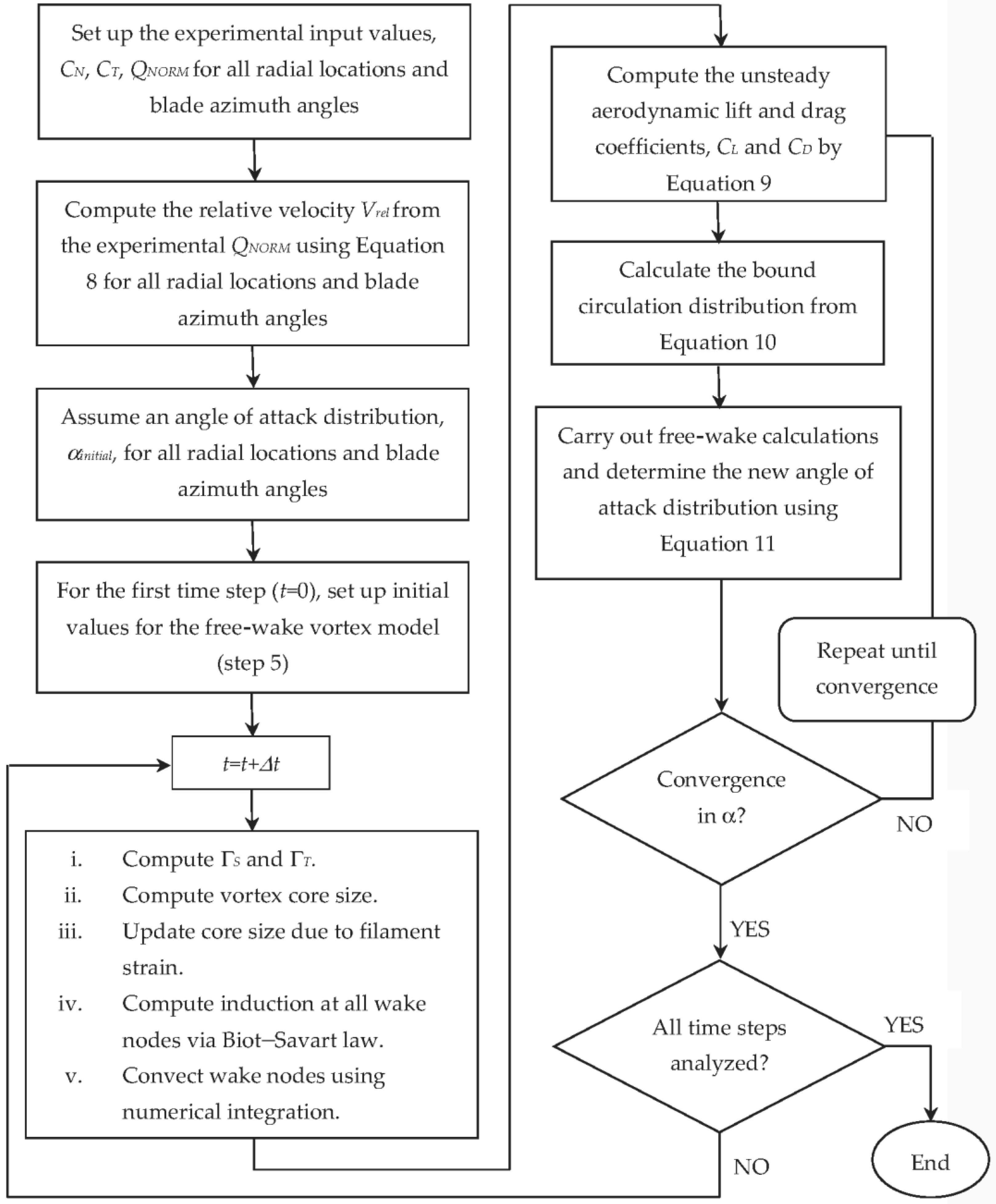
This section presents the results of the iterative procedure (
Figure 2) for deriving the unsteady angle of attack on the NREL rotor at wind speeds of 5 and 15 m/s at yaw angles of 10°, 30°, and 45°. These wind speeds were chosen as they result in attached and separated flow conditions. In the numerical computations with the lifting-line free-wake vortex model, each blade was discretized into 41 radial elements (
Nb) and an azimuth step (
Nθ) of 10° was used. The relative numerical error for the verification tests (
Nθ = 5° –
Nθ = 10°) and (
Nb = 41 –
Nb = 37) are less than 1.9% in the axial induction factor (
ax = uax/U∞) and less than 0.064% in the bound circulation. In total, 33 revolutions were modeled for each operating condition, with the first three rotor rotations always used as initial values for the free wake model to make sure that the wake extended downstream by more than 2
R. Only the results from cycle 4 to cycle 33 were mainly used for the analysis.
In the absence of detailed near-wake measurements, it is very difficult to accurately establish the optimum values for the viscous parameters (δ
v, Sc). These parameters determine the initial core radius and core growth with time for each wake vortex filament, leaving a considerable impact on the development of the modeled helical vortex wake structure. A detailed sensitivity analysis of how parameters (δ
v, Sc) affect the induced velocities at the blades may be found in Sant
et al. [
15]. In this study, these were set to (50, 10) as these yield a viscous core radius that is within the order of the boundary layer thickness at the trailing edge of the blades.
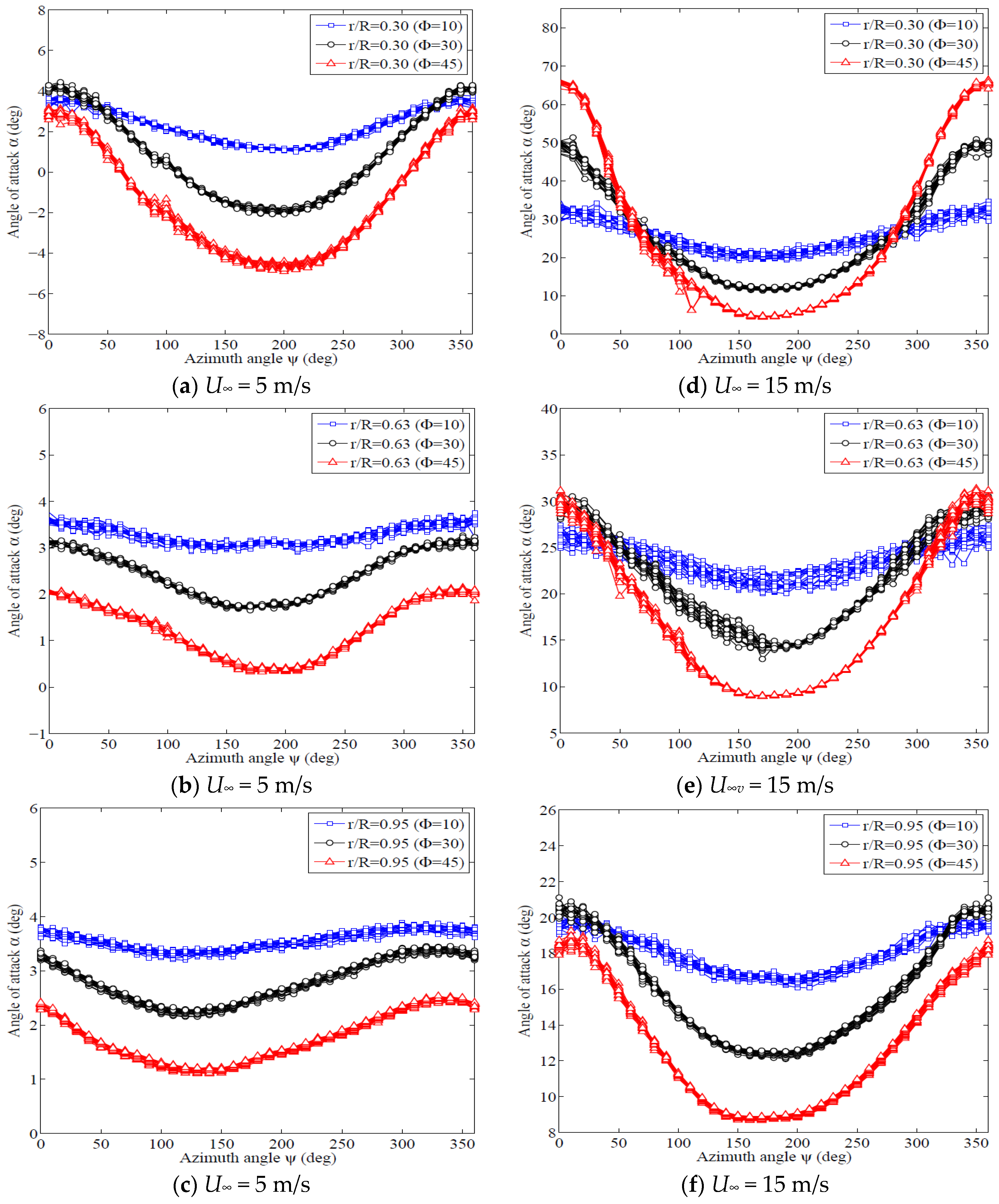
5.2. Variation of the Unsteady Angle of Attack with the Blade Azimuth Angle
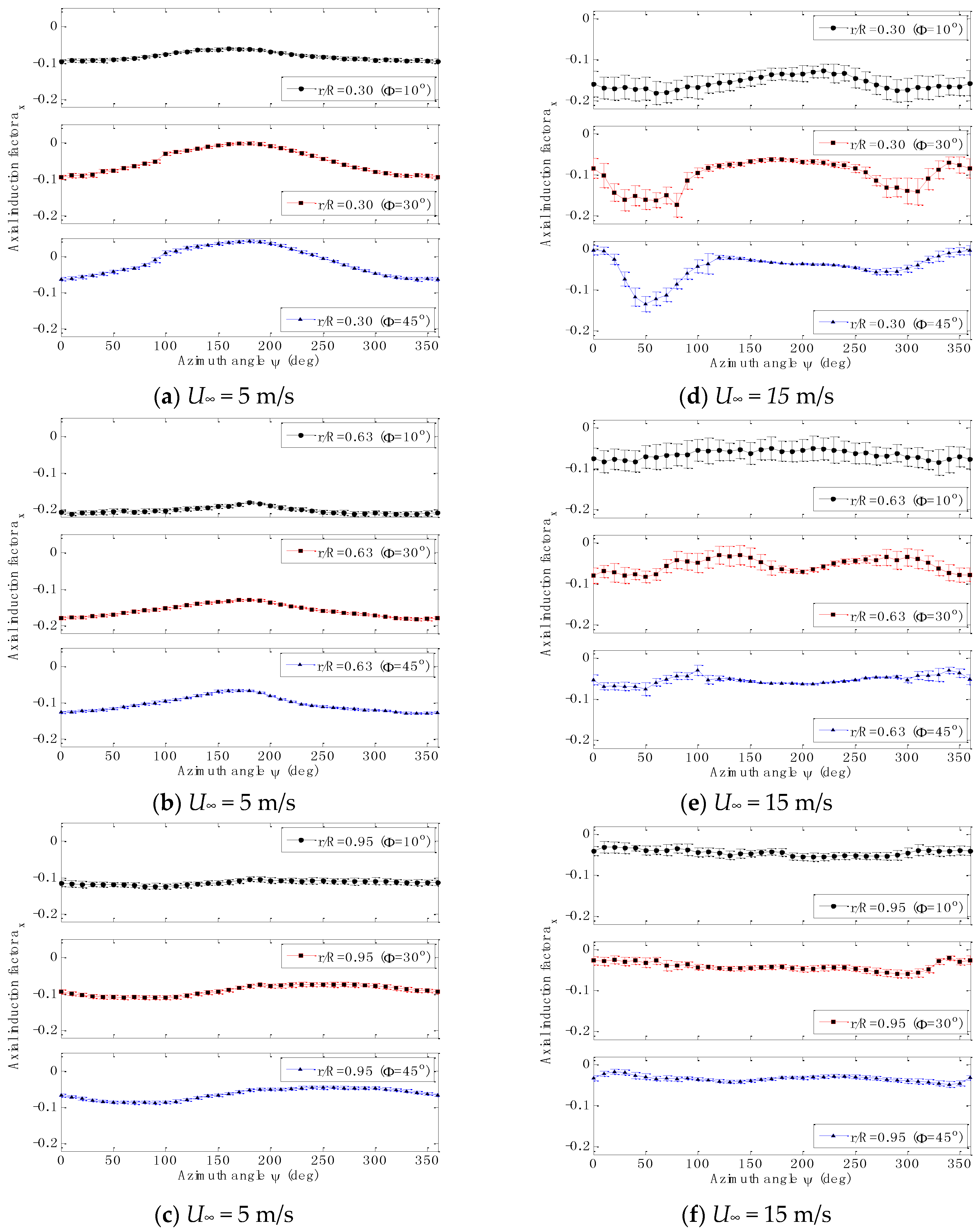
Figure 4 depicts the variation of the local angle of attack at different radial locations as a function of the blade azimuth angle at wind speeds 5 and 15 m/s, respectively. The variation is presented over the entire 30 rotor rotations. For the lower wind speed (
Figure 4a–c), all the predicted local angles of attack are below the static stall angle of 15.3° [
28], indicating attached flow at all radial locations. The sinusoidal variation in the angle of attack has the highest values near the blade root at the blade azimuth angle close to 0°/360°. At the higher wind speed (
Figure 4d–f), the static stall angle is exceeded, even at the outboard sections. This is clearly shown for blade azimuth positions between around 0°–120° and 240°–360°, leading to dynamic stall with massive unsteady flow separation that dominates the flow field. On the other hand, for blade azimuth angles between approximately 120°–240°, the flow remains fully attached, as indicated in [
5,
19].
The cycle-to-cycle variation in the angle of attack at 5 and 15 m/s is very small. This may be observed from
Table 1 which shows the maximum normalized standard deviation in the unsteady angle of attack (
σα/μα) at the given five radial locations. For
U∞ = 5 m/s, this increases marginally at the inboard blade sections and for the larger yaw angles. However, the maximum value reached is estimated to be lower than 4%. At a wind speed of 15 m/s, the cycle-to-cycle variations in the angle of attack are also small, with the highest normalized standard deviation reaching 3.81% at
r/R = 0.30 at Φ = 10°. Although turbulence in the undistributed wind approaching the rotor may lead to a cycle-to-cycle variation in the angle of attack, such influences are likely to be very small given the fact that the turbulence levels in the NASA Ames wind tunnel were very small (see
Section 2). The variation between the different rotor rotations is primarily induced by the unsteady flow phenomena at the blades and is thus self-induced by the rotor when operating in the yawed state. The resulting unsteadiness in the bound circulation along each blade results in unstable vorticity in the near wake (Equations (1) and (2)). Consequently, variations in the induced velocities, (hence also in the angle of attack) are experienced at the blades between successive rotations.
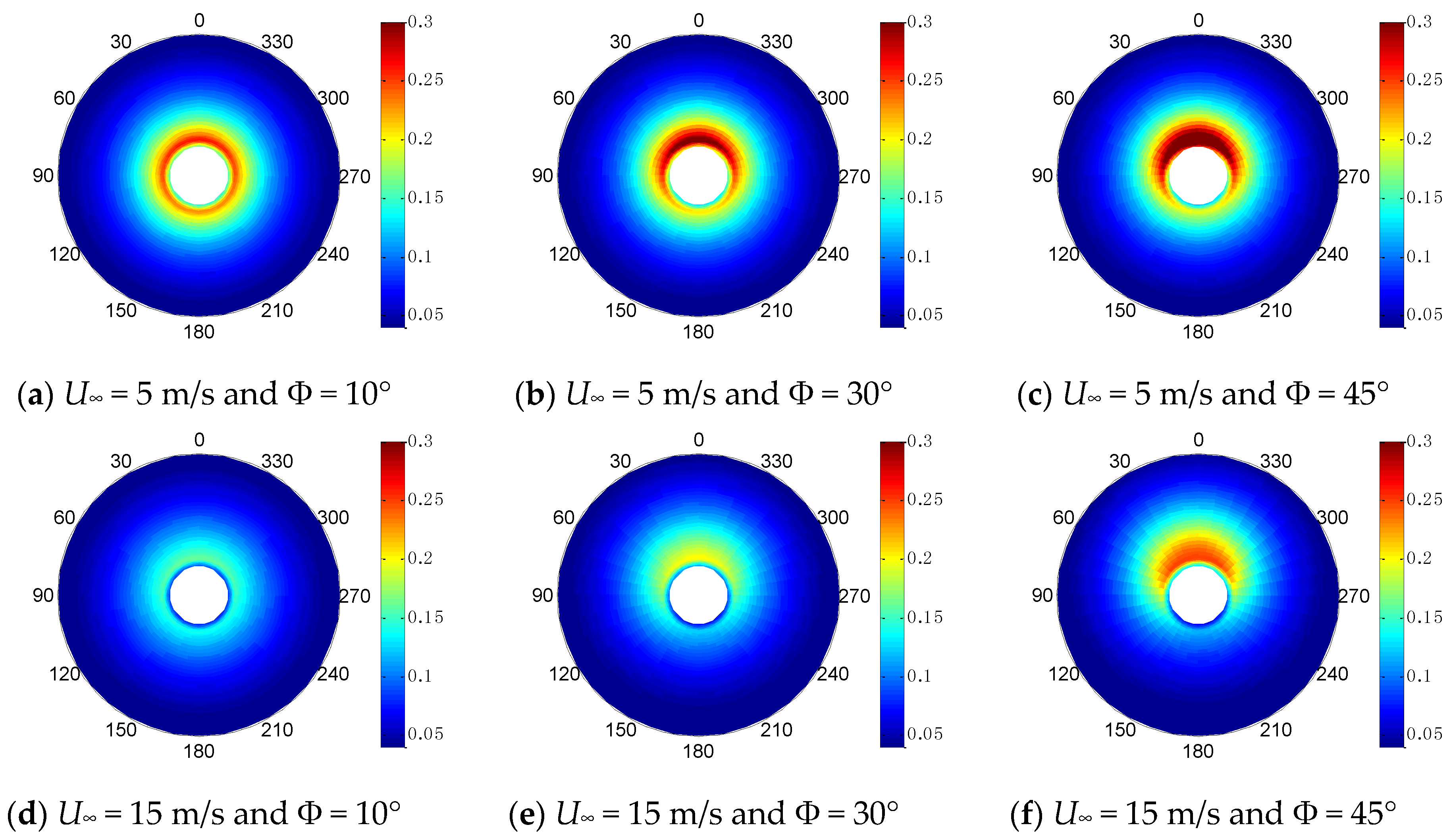
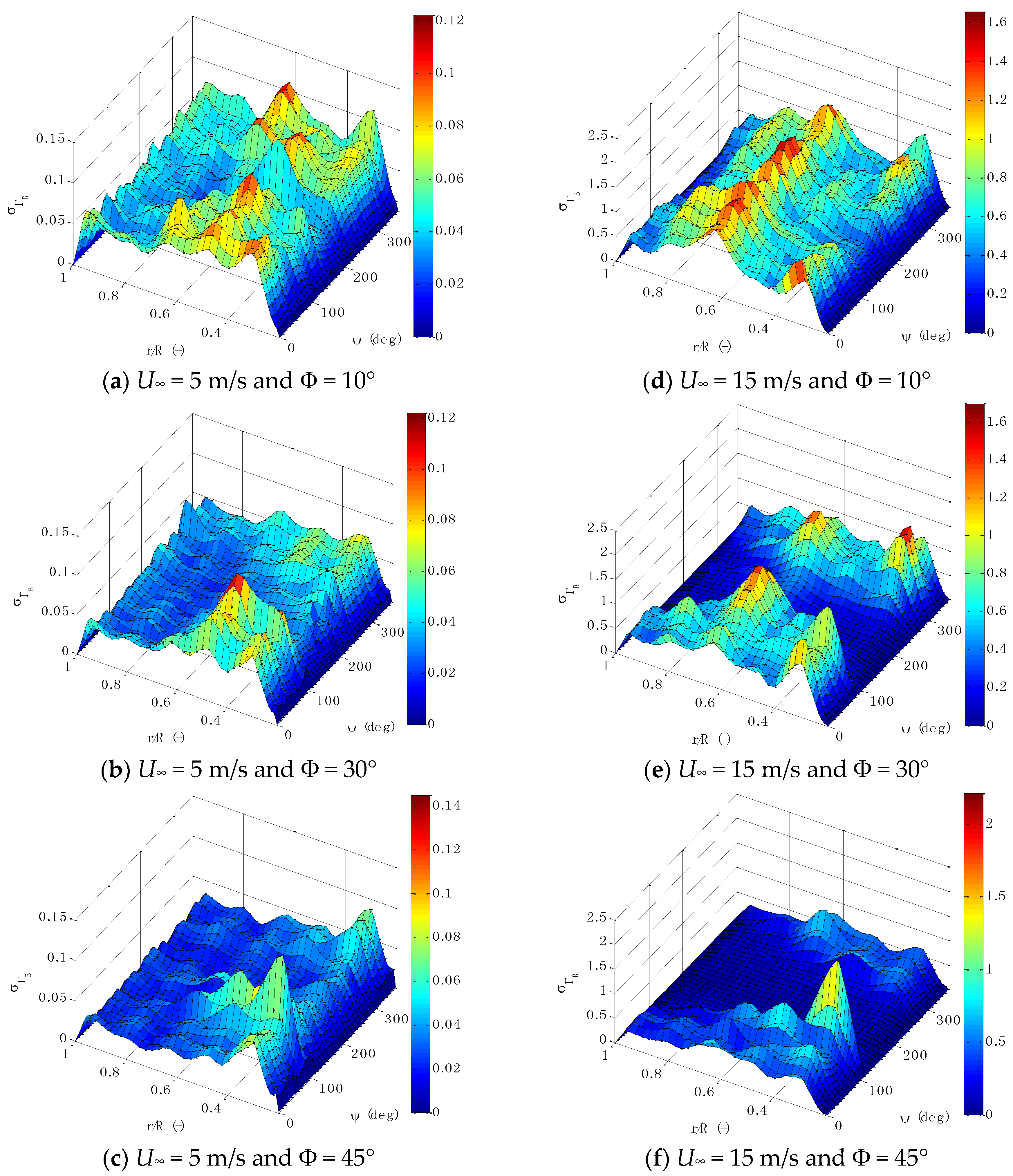
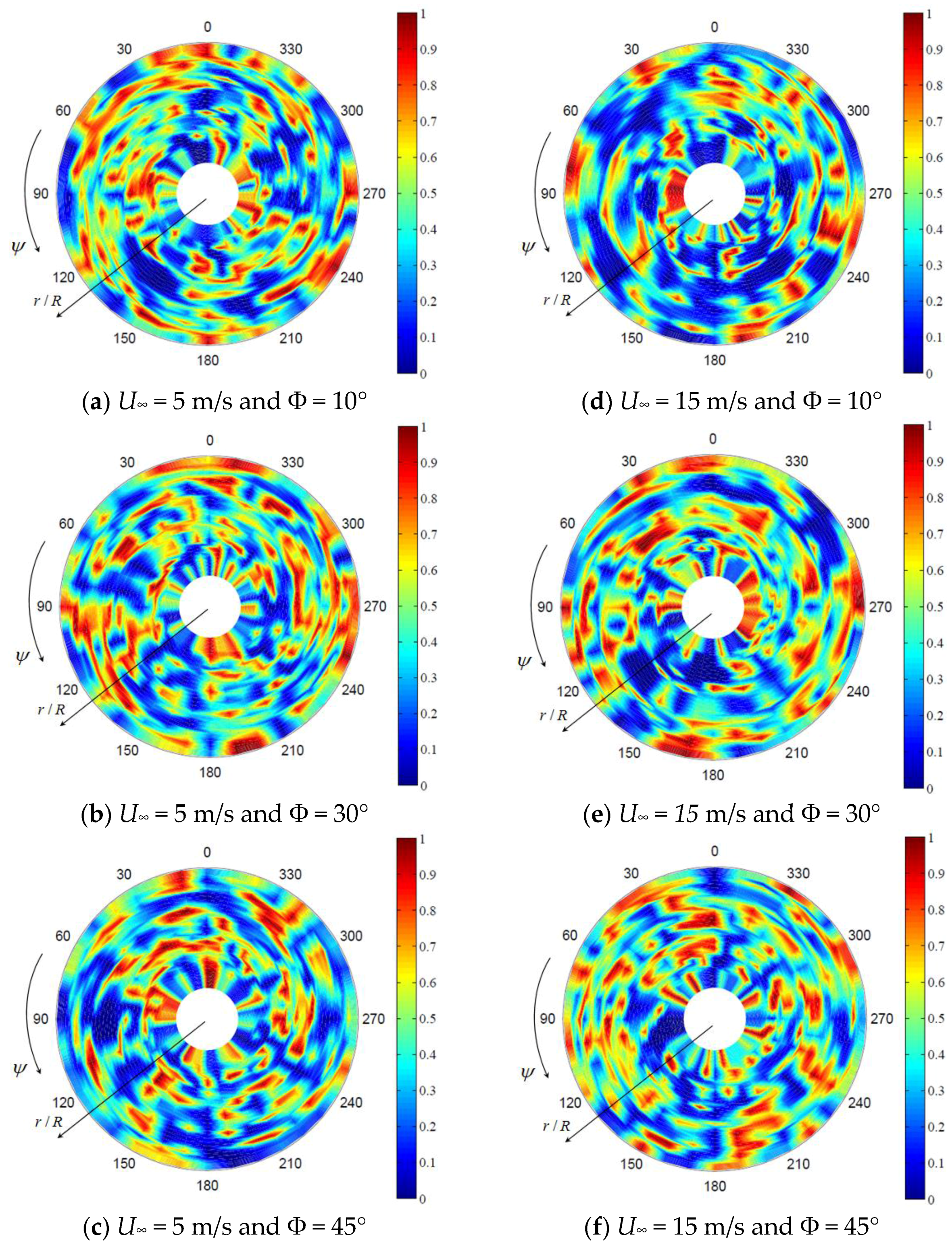
The variation in the reduced frequency across the entire rotor disc for the different operating conditions is presented in
Figure 5. It may be noted that the cycle-to-cycle variation in the angle of attack shown in
Figure 4 is well correlated to the reduced frequency (
k = Ω
c/(2
Vr)). Higher reduced frequencies imply higher levels of unsteadiness in the flow regime over the blade aerofoil sections, which lead to dynamic stall when the local angle of attack exceeds the static stall angle (in this case at
U = 15 m/s). Under yawed rotor conditions, their occurrence shifts to the blade inboard regions over the upper half of the disc, at azimuth positions (0° ≤ Ψ≤ 40°) and (320° ≤ Ψ ≤ 360°). These coincide with those experiencing large cycle-to-cycle variations on the angle of attack (compare
Figure 5d–f with
Figure 4d–f).
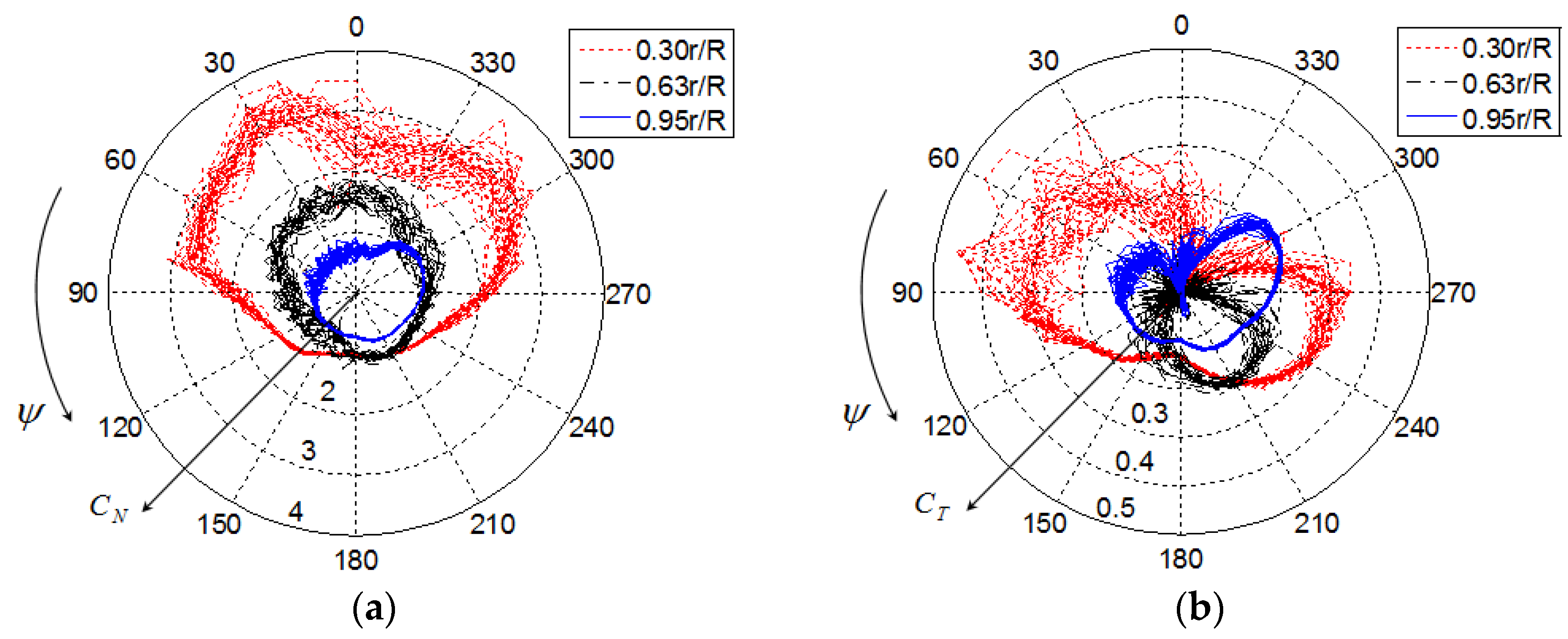
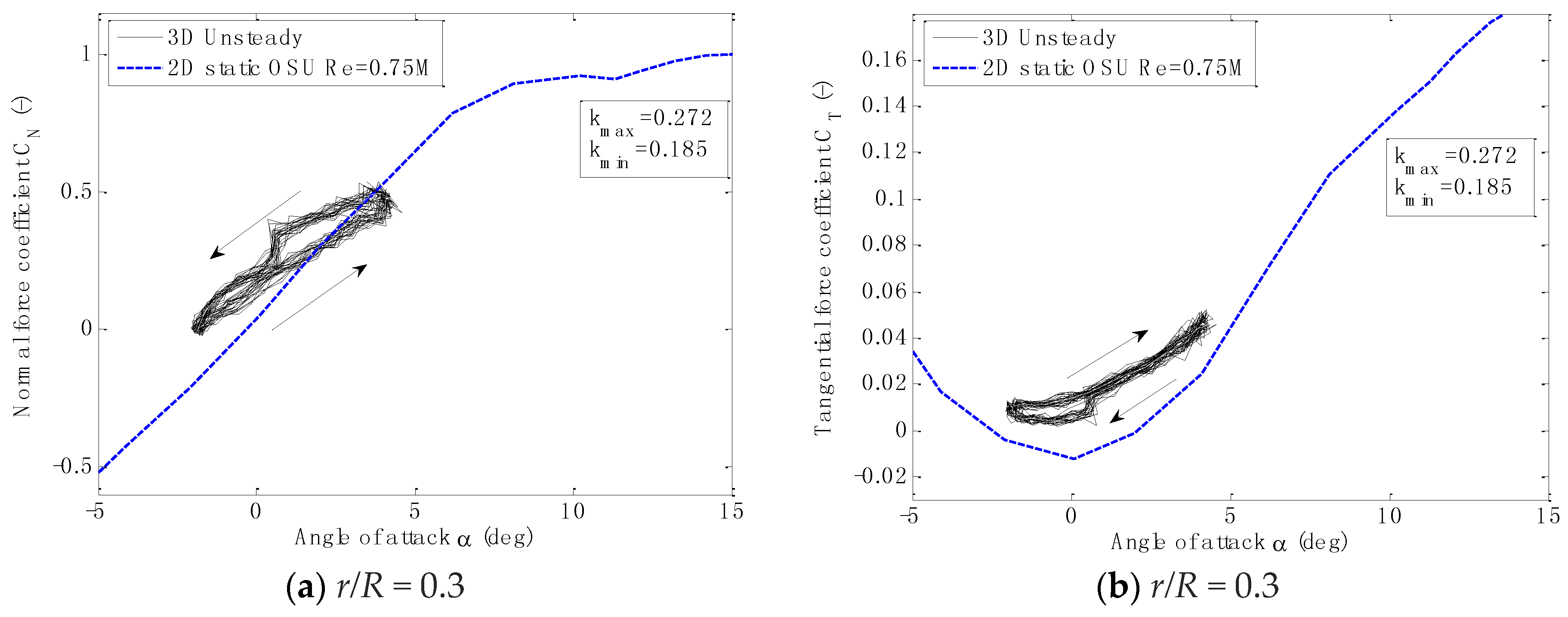
5.3. Variation of CN and CT with α (Hysteresis Loops) and the Blade Azimuth Angle
Although the cycle-to-cycle variations in
α were found to be small, the corresponding variations in the normal and tangential force coefficients were significant for certain conditions. Using the approach presented in this study, it was possible to derive directly from the measurements the hysteresis loops,
CN-α and
CT-α, for 30 rotor revolutions. These are presented in
Figure 6 and
Figure 7 for Φ = 30°. The 2D steady wind tunnel aerofoil data provided by Ohio State University (OSU) are also included in these plots for comparison [
28]. At lower wind speeds (
U∞ = 5 m/s and Φ = 30°), the boundary layer is attached on the suction surface of the aerofoil during the cycles, as the angle of attack is below the static stall angle. The
CN and
CT behavior is essentially quasi-static, with elliptical hysteresis loops, in the sense that departures from the static behavior are not particularly apparent throughout the cycle. At the inboard sections the flow is generally unsteady and becomes quasi-steady when approaching the blade tip. The loops of
CN and
CT remain close to the static value, except at
r/R = 0.95 where the slope of the normal force coefficient is smaller than that of the 2D aerofoil. This is related to the strong 3D effects resulting from the tip vortex formations in the near wake on the flow, suggesting that special treatment should be given to the tip sections when modeling dynamic stall phenomenon by possibly using a smaller slope for the aerofoil data curve than that of the 2D static data curve. Under 3D flow conditions, a rotating blade experiences unsteady axial, tangential, and radial velocity components. The relative wind speed on a rotating blade increases with the radial locations and the blade exhibits two external forces during rotation, called centrifugal and Coriolis forces. The blade also exhibits an increase in dynamic pressure from the root to the blade tip [
29]. For this wind speed (5 m/s), the flow is attached and the angle of attack is below the static stall angle and, hence, the chord-wise flow is more effective compared to the radial flow [
30]. The lift and drag force coefficients obtained from the 2D wind tunnel can be, therefore, used to predict the aerodynamic forces on rotating blade sections with a reasonable level of accuracy.
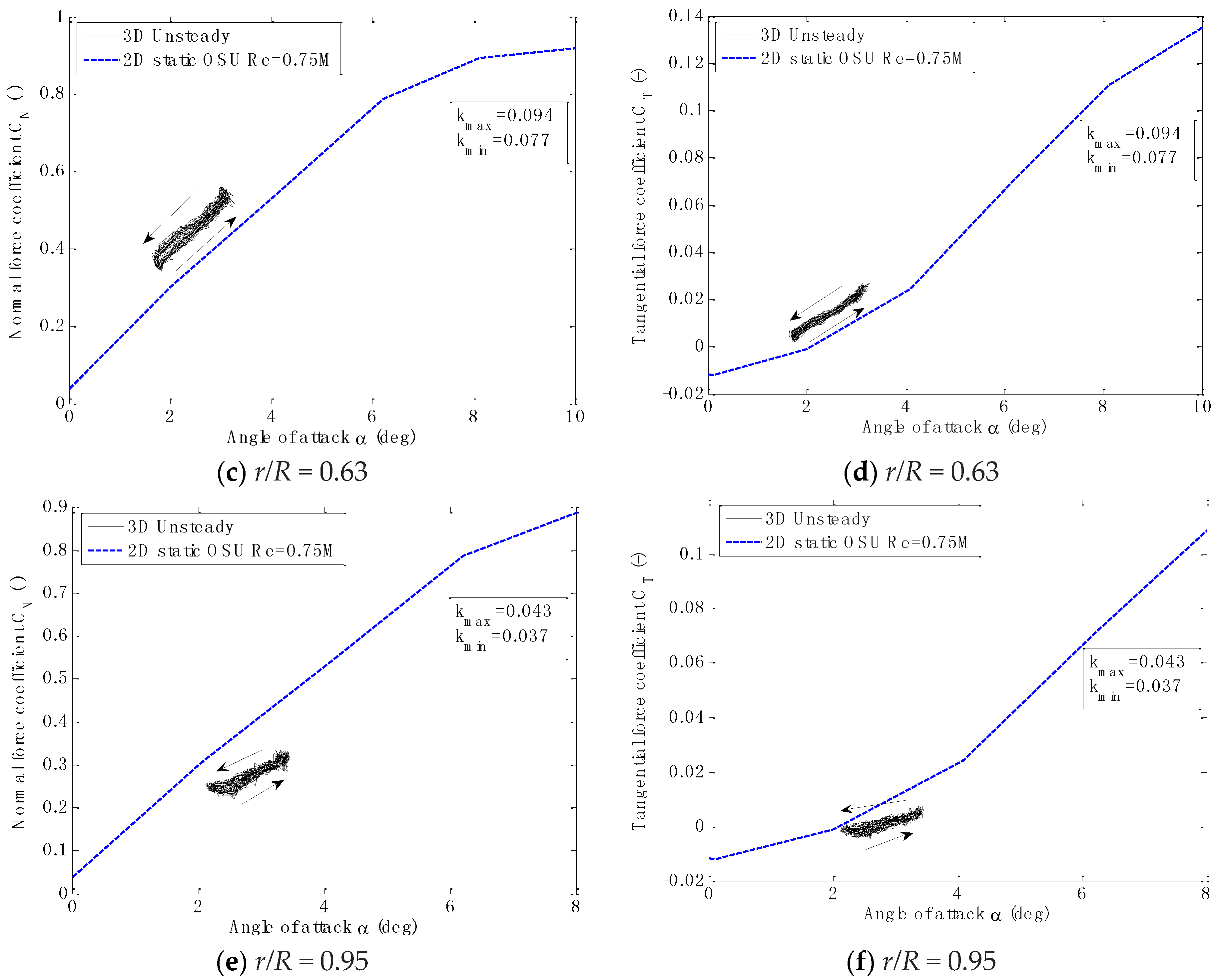
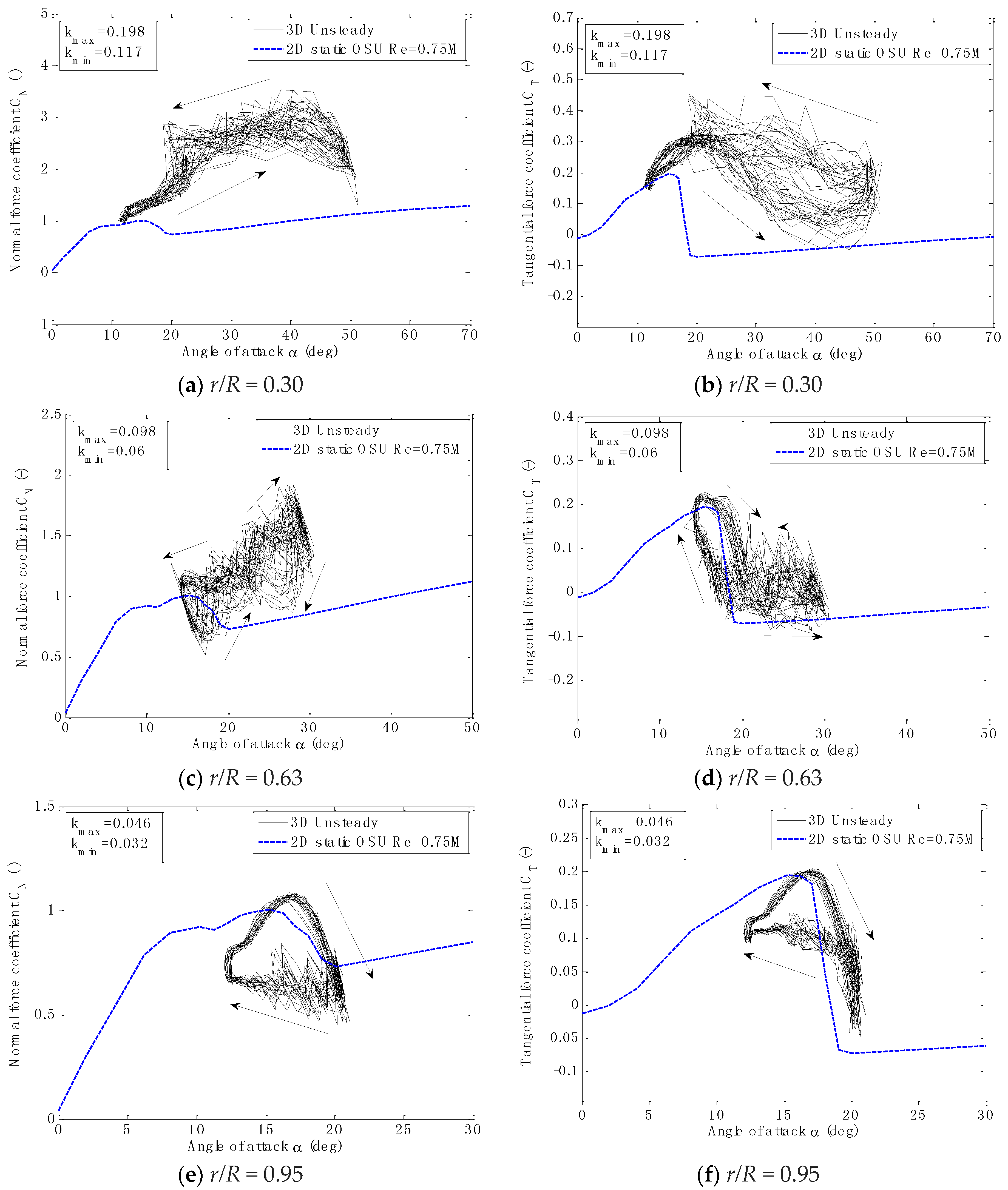
At the higher wind speed (
U∞ = 15 m/s and Φ = 30°), the mean angle of attack decreases from root to tip, down to below 15.3° at
r/R = 0.95. Compared to the hysteresis loops for wind speed 5 m/s, the shape and trend of the hysteresis loops for 15 m/s are wider and cycle-to-cycle differences are larger. Stall is delayed to a higher angle of attack than the static stall angle and, hence, dynamic effects became pronounced with significant
CN undershoots and overshoots. At the inboard sections, the maximum angle of attack greatly exceeds the static stall angle and the deviation from the static characteristic is evident. The impact of a dynamic stall vortex (DSV) on the upper surface of the aerofoil is also evident, which leads to a significant increase in the normal force coefficient hysteresis loops. When the DSV sheds into the wake, the aerofoil experiences a sudden drop in lift. The presence of a secondary peak in the normal force coefficient hysteresis loops at high angles of attack is commonly known to be a result of the shedding of the secondary vortex, as was shown in Choudhry
et al. [
31]. The flow reattachment process at the inboard sections is delayed to a higher angle of attack than the static stall angle, with generally a high level of unsteadiness. The kinematics of the dynamic stall vortex exhibits a different behavior from the cycle-to-cycle, leading to a significant variation in the pressure distribution on the blade surfaces. It is common that the blade at high wind speed experiences high angles of attack, especially at the inboard section of the blade. In addition, 3D stall delay due to rotation contributes to radial flow, due to the centrifugal force which forces the air to move along the radial locations of the blade. Under separated flow conditions, the radial movement of the separated flow is further impacted by Coriolis forces, which act as a favorable pressure gradient in the chord-wise direction. The latter process causes a reduction in the thickness of the boundary layer, a delay in the onset of stall, and an increase in the lift force coefficient to a high angle of attack [
32]. Therefore, the lift and drag force coefficients obtained from the 2D wind tunnel cannot properly model the aerodynamic loads on a rotating blade, as the 3D effects are not included in these data.
5.5. Normality Test of the Randomly Fluctuating Aerodynamic Loads
All lifting line based models for representing blade loads rely on the use of engineering aerofoil data models which basically relate the load coefficients
CN and
CT (or
CL and
CD) to an angle of attack. It should be appreciated that developing improved engineering models to cater for cycle-to-cycle variability due to dynamic stall would be more complex if both the cycle-to-cycle variability in the load coefficients (
CN and
CT) and the angle of attack are large. The iterative approach adopted in this study (
Section 4) enabled a detailed quantitative evaluation of the variability in the angle of attack over successive rotor revolutions induced by rotor yaw. It was evident that the cycle-to-cycle variability in the derived angles of attack was found to be very small, even for conditions when the corresponding variability in
CN and
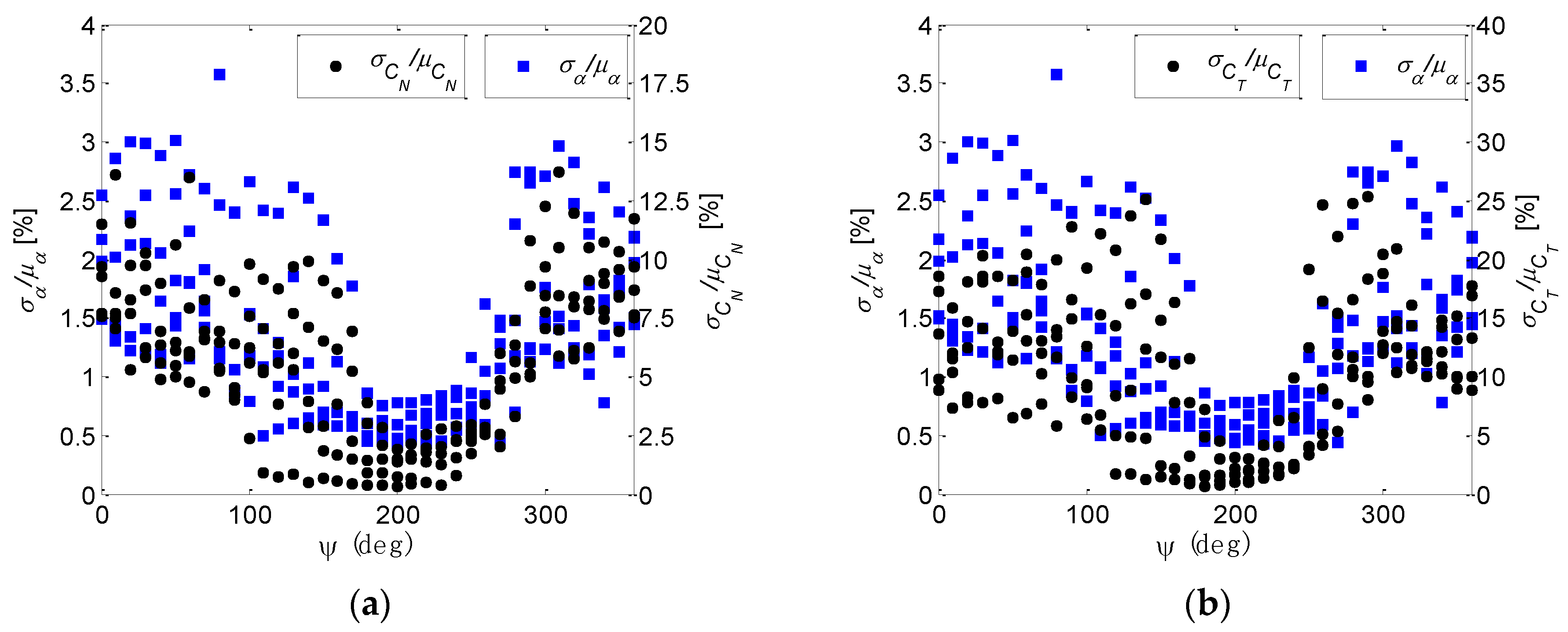
CT is large. This may be observed from the plots in
Figure 10, which show the variation in the normalized standard deviations for
CN,
CT and α with the blade azimuth position. This behavior was observed at all blade radial locations and operating conditions of the NREL Phase VI rotor considered in this study. Consequently, the probability distribution of the aerodynamic loads should not be significantly dependent on the probability distributions of the other aerodynamic quantities, like those for the angle of attack. This would considerably simplify the use of engineering modeling for simulation of the cycle-to-cycle variation in the aerodynamic loadings.
In this section, a statistical analysis is presented for the aerodynamics load coefficients based on 30 rotor revolutions. This made it possible to examine the statistical distribution expected for a given angle of attack and radial/azimuthal position. Normality tests were also carried out at 5 and 15 m/s and yaw angles 10°, 30°, and 45°, in order to establish the extent to which the cycle-to-cycle variability in
CN and
CT measurements at each rotor blade azimuth angle and radial location exhibits a normal probability distribution. This would further simplify the integration of stochastic modeling for wind turbine design tools. This analysis was based on different criteria and approaches: (1) the skewness and kurtosis z-values (−1.96 <
z-value < 1.96) [
33]; (2) the Shapiro–Wilk
p-value (
p-value > 0.05) [
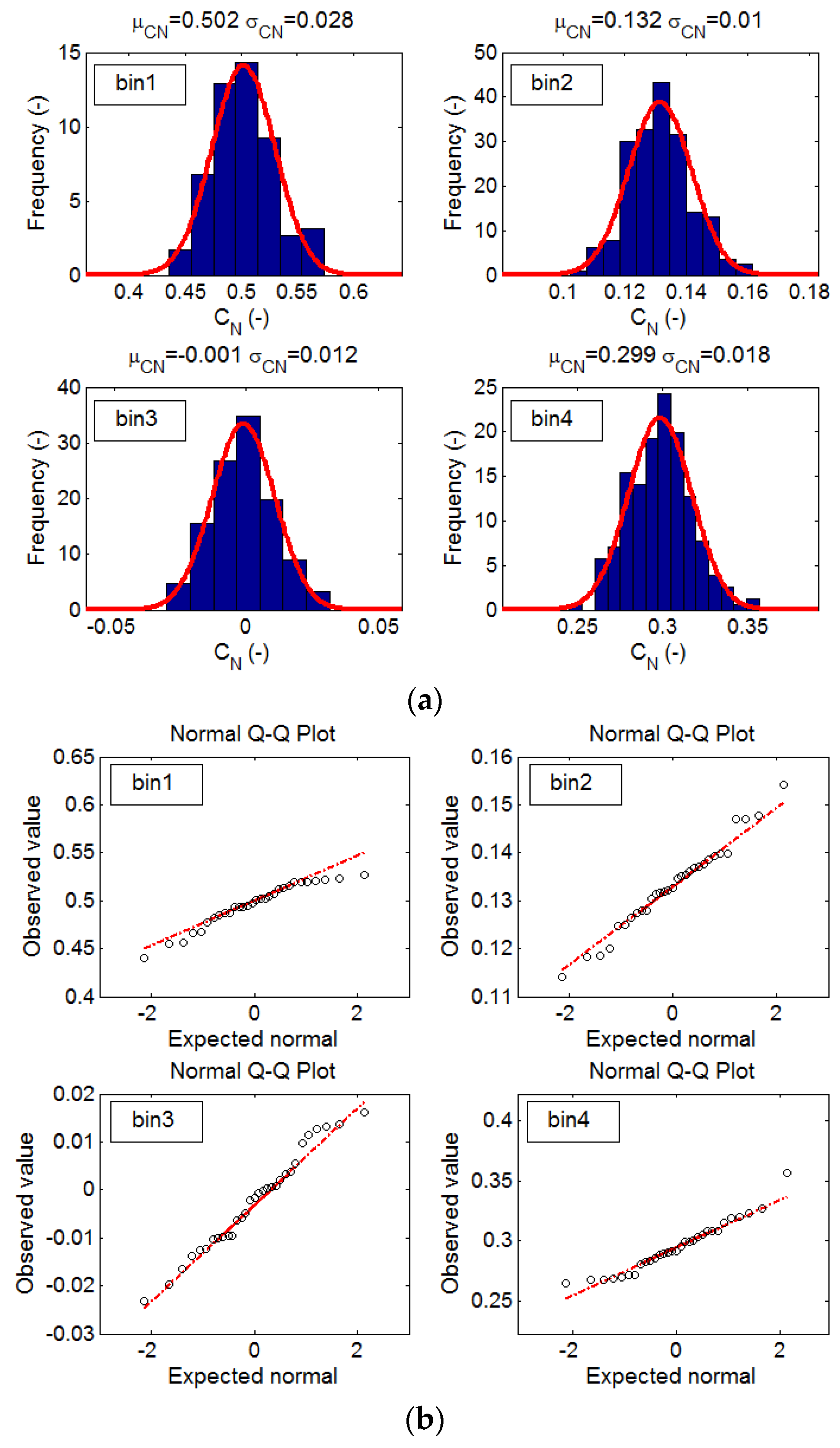
34]; and (3) the Normal Quantile–Quantile plots and Histograms. The data throughout these tests were binned per one degree azimuth angle. Hence, each bin includes a total of 30 data points.
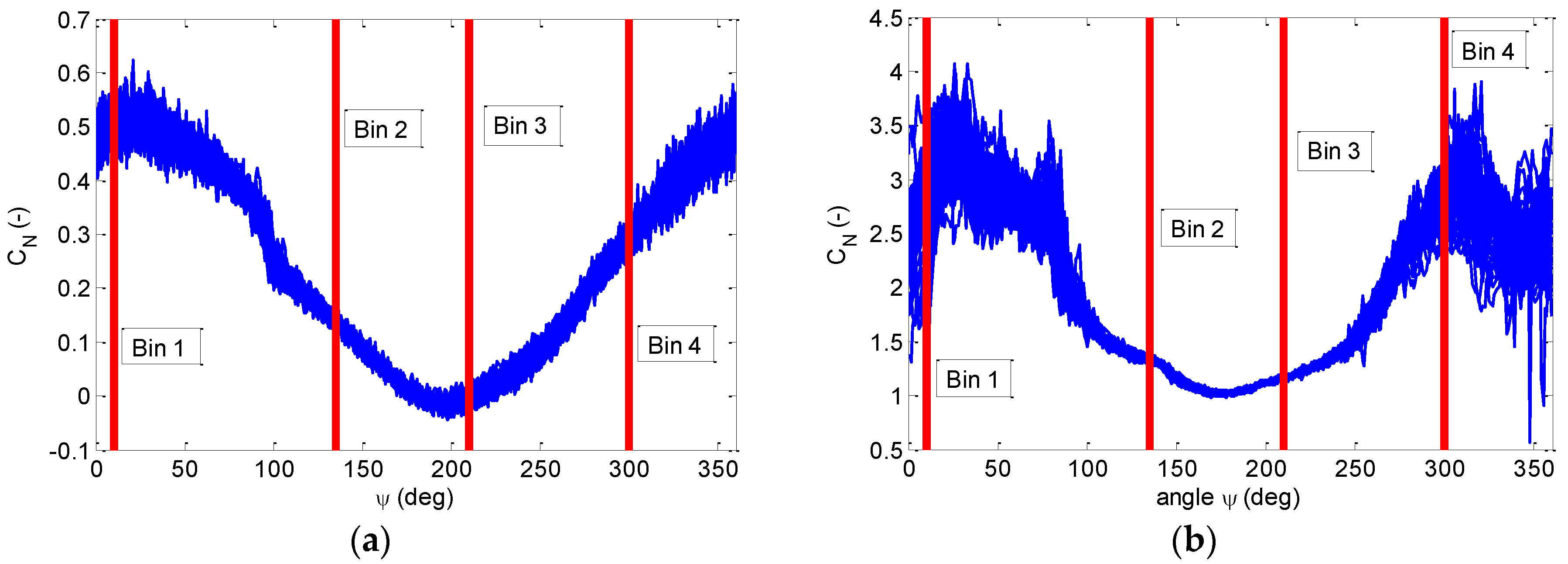
Table 3 and
Table 4 show some selected samples at the azimuthal bins shown in
Figure 11 at
r/R = 0.30.
Figure 12 and
Figure 13 illustrate the corresponding histograms and the normal Quantile–Quantile plots for each bin. When constructing histograms, a free important parameter is the number of bins. The number of bins used in a histogram is sensitive to the width of the bins. If the bin width is too large, the resulting probability distribution will then tend to be uniform, giving the wrong distribution, while using too small a bin width may lead to gaps in the resulting probability distribution, which is probably not representative of the correct distribution. For this reason, the optimal number of bins and the bin width should be selected carefully. The optimal bin width ∆
* was calculated using the approach presented by Shimazaki and Shinomoto [
34,
35] as a minimizer of the formula [(2
– )/∆
2], where
and
are mean and variance of
CN sample counts across bins with width ∆. The optimal number of bins is then calculated as [(max(
X) − min(
X))/∆
*], where
X is
CN sample data vector. The same also holds for
CT data.
It can be seen that, from
Table 3 and
Table 4, the Shapiro–Wilk’s test (
p-value
> 0.05) and the Skewness and kurtosis
z-values (
−1.96
< z-value
< 1.96) agree well, identifying the same normal distributions. For example, it can be observed from
Table 3 that all the skewness and kurtosis
z-values are within the range (
−1.96
< z-value
< 1.96), while the results of Shapiro–Wilk’s test show that all
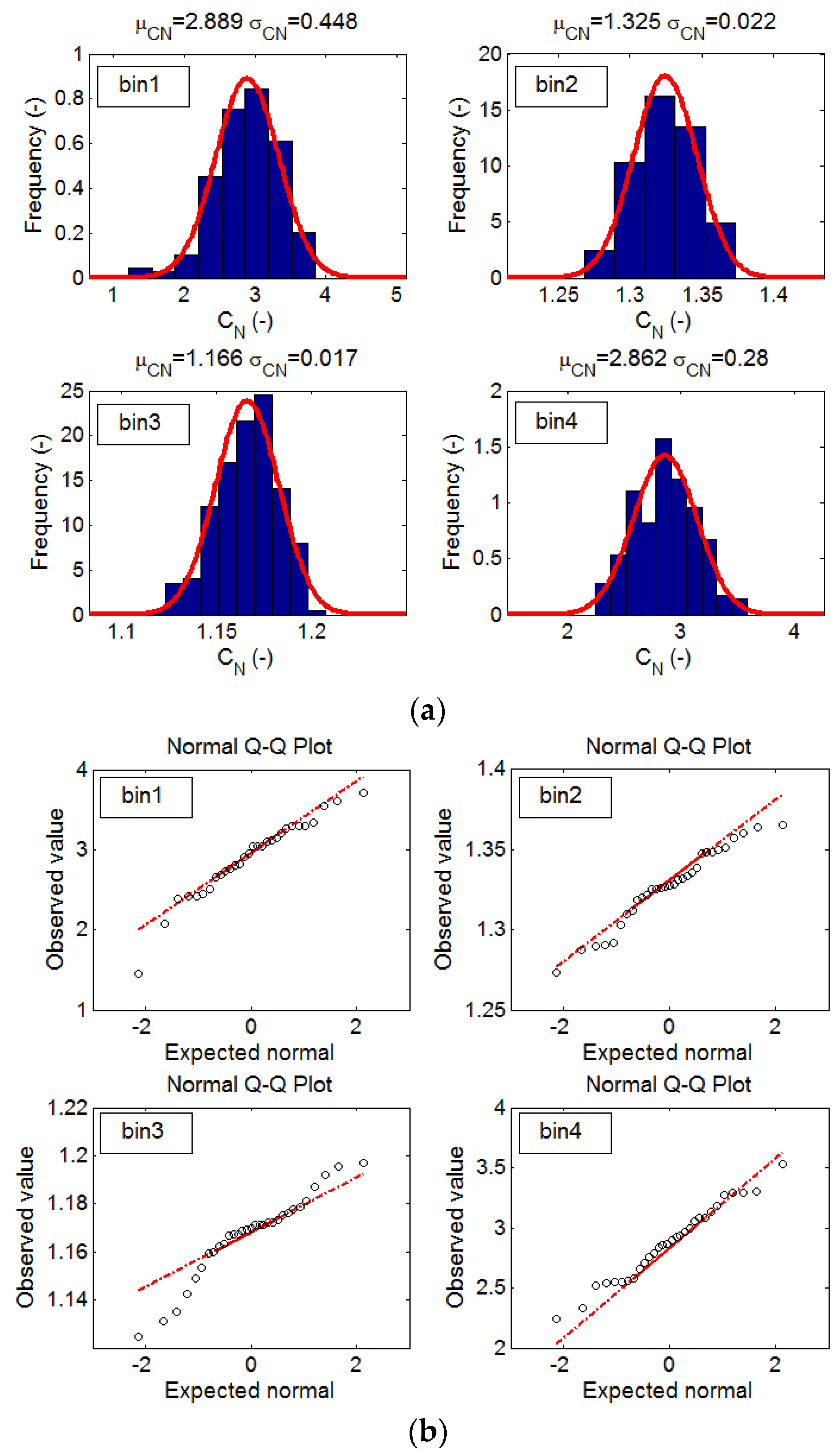
p-values are greater than the significance level of 0.05. This hypothesis indicates that the data come from a population that can be assumed to be normally distributed. The same observation can be also seen in
Table 4 for the higher wind speed of 15 m/s. The histograms and the normal Q–Q plots presented in
Figure 12 and
Figure 13 also corroborate with results of the Shapiro–Wilk’s test and the Skewness and kurtosis
z-values as regards normality. It should also be understood that a management decision is issued regarding normality when more than two statistical tests agree with each other. The example in
Figure 13 includes results of the Normal Quantile–Quantile plot of bin 3. For this bin, the skewness and kurtosis
z-values, Shapiro–Wilk’s test
p-value in
Table 4 and the corresponding histogram indicate that the data are normally distributed. The normal Q–Q plots, on the other hand, show that the data do not seem to be normally distributed and, hence, such distribution is considered as a normal distribution.
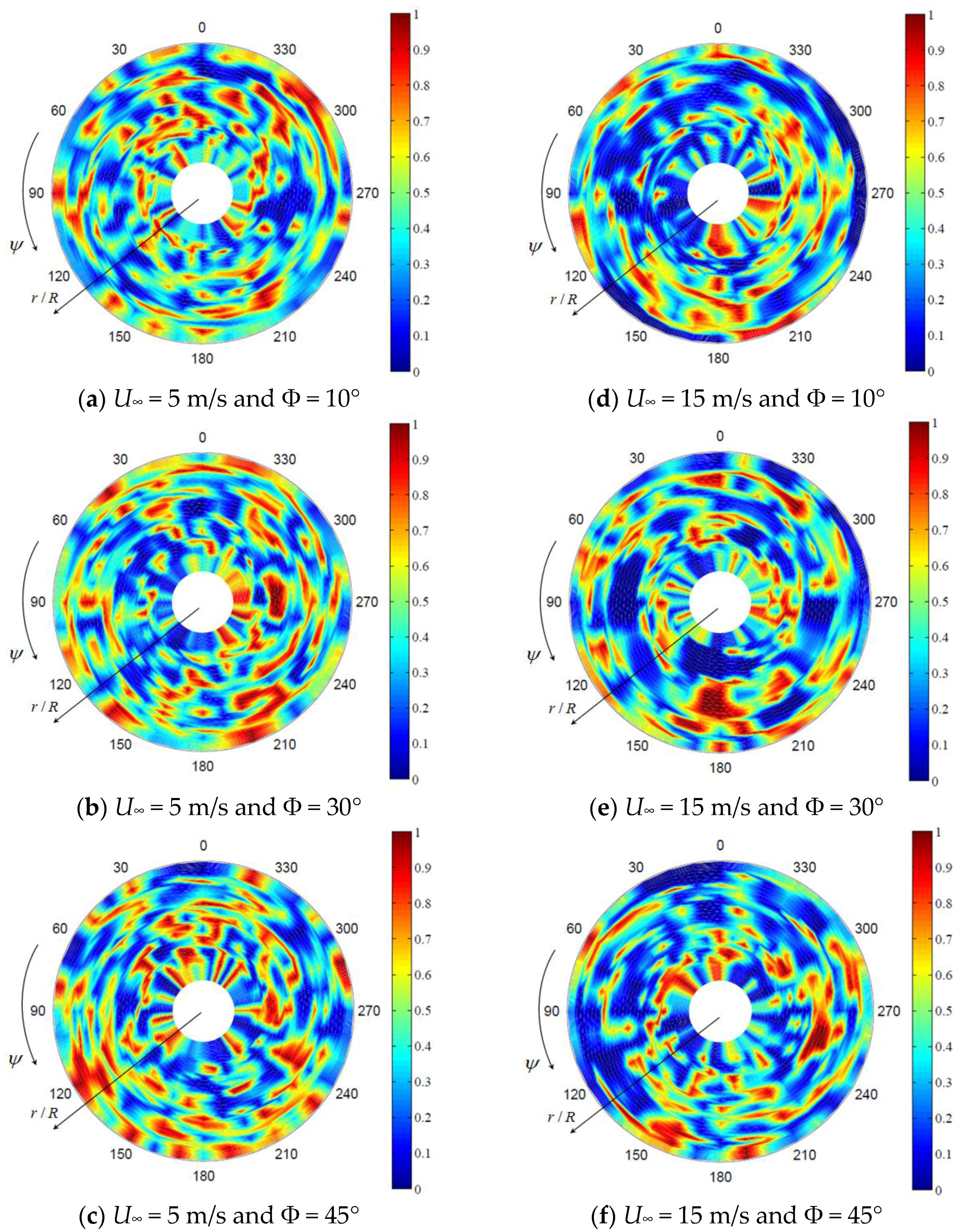
For a complete assessment, the Shapiro–Wilk’s test was carried out for the full azimuth angle range and all radial locations at both
U∞ = 5 and 15 m/s and yaw angles 10°, 30°, and 45°. The results for
CN and
CT are presented in
Figure 14 and
Figure 15. The different colors shown in the plots indicate the probability distribution (
p-value) as computed by the Shapiro–Wilk’s test. The percentage number of data points across the entire rotor disc failing the Shapiro–Wilk’s test is also shown in
Table 5. This was computed at all radial locations using the formula:
For wind speed 5 m/s, the average percentage of data bins (
CN data points) that are not normally distributed is less than 9%, while for wind speed 15 m/s it is less than 11% (see
Table 5). In the case of the
CT data, the average percentage of data bins that are not normally distributed is less than 9% for wind speed 5 m/s and less than 16% for wind speed 15 m/s (see
Table 5). It should be noted, however, that for data points failing the Shapiro–Wilk’s test, normality is still usually observed within ± two standard deviations. From
Table 5, it can be also seen that the average of the percentage number of data points showing non-normality in
CN and
CT for the three azimuth angles at 5 m/s is approximately the same (8.71% for
CN and 8.39% for
CT). This trend is, however, not seen at 15 m/s, where it is noted that the average of the percentage number of data points for
CT having non-normal distribution is higher than this for
CN (10.85% for
CN and 15.76% for
CT).
As observed from the results presented in this subsection, the majority of the data points of
CN and
CT at various blade azimuth angles and radial locations (
r/R) are normally distributed. This matter has so far not been addressed sufficiently in literature related to yawed wind turbine aerodynamics (see
Section 1), where the analysis for stalled conditions has mainly concentrated on the mean values. The current paper demonstrates the following: (i) aerodynamic modeling of yawed turbines based solely on the average estimates at the different blade azimuth positions would neglect some important information about unsteady flow phenomena; (ii) the simulated wake downstream of the yawed turbine over a number of rotor rotations is considerably affected by the cycle-to-cycle aerodynamic loads on the blades, hence, it is important to understand the unsteady effects on the blades under stalled flow conditions which are self-induced by the rotor; and (iii) the characterization of the type of distribution for the cycle-to-cycle aerodynamic loads at a given mean angle of attack and radial location provides insight for determining the type of stochastic models (Monte Carlo methods) required to account for cycle-to-cycle differences in blade loads. The assumption that both
CN and
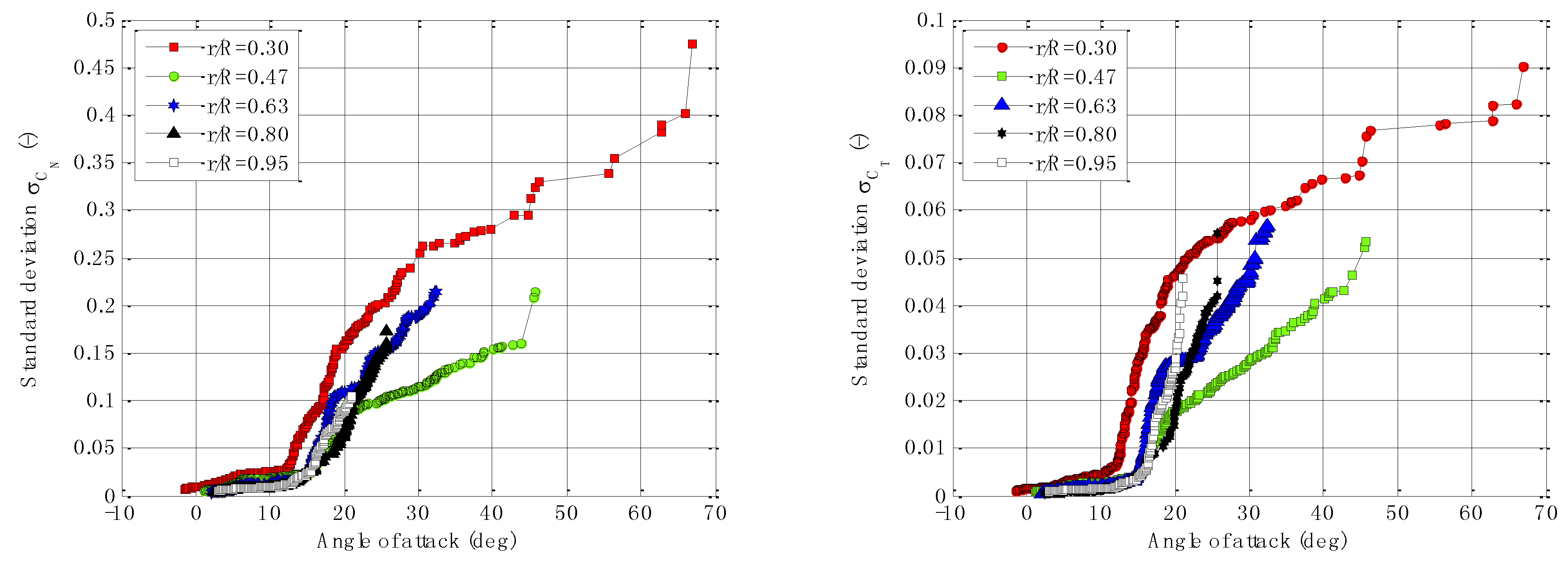
CT are normally distributed for a given angle of attack simplifies the stochastic modeling process significantly. Yet, the standard deviations under several operating conditions may still be required. Reasonable estimates may be derived from experiments or from a Computational Fluid Dynamics (CFD) code. In the present paper, the standard deviations of
CN and
CT for the different angles of attack and radial locations have been collected from the developed approach (
Figure 2) for all radial locations, blade azimuth angles, wind speeds, and yaw angles, and arranged as shown in
Figure 16.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}