
Numerical Simulation of the Propagation of Hydraulic and Natural Fracture Using Dijkstra’s Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
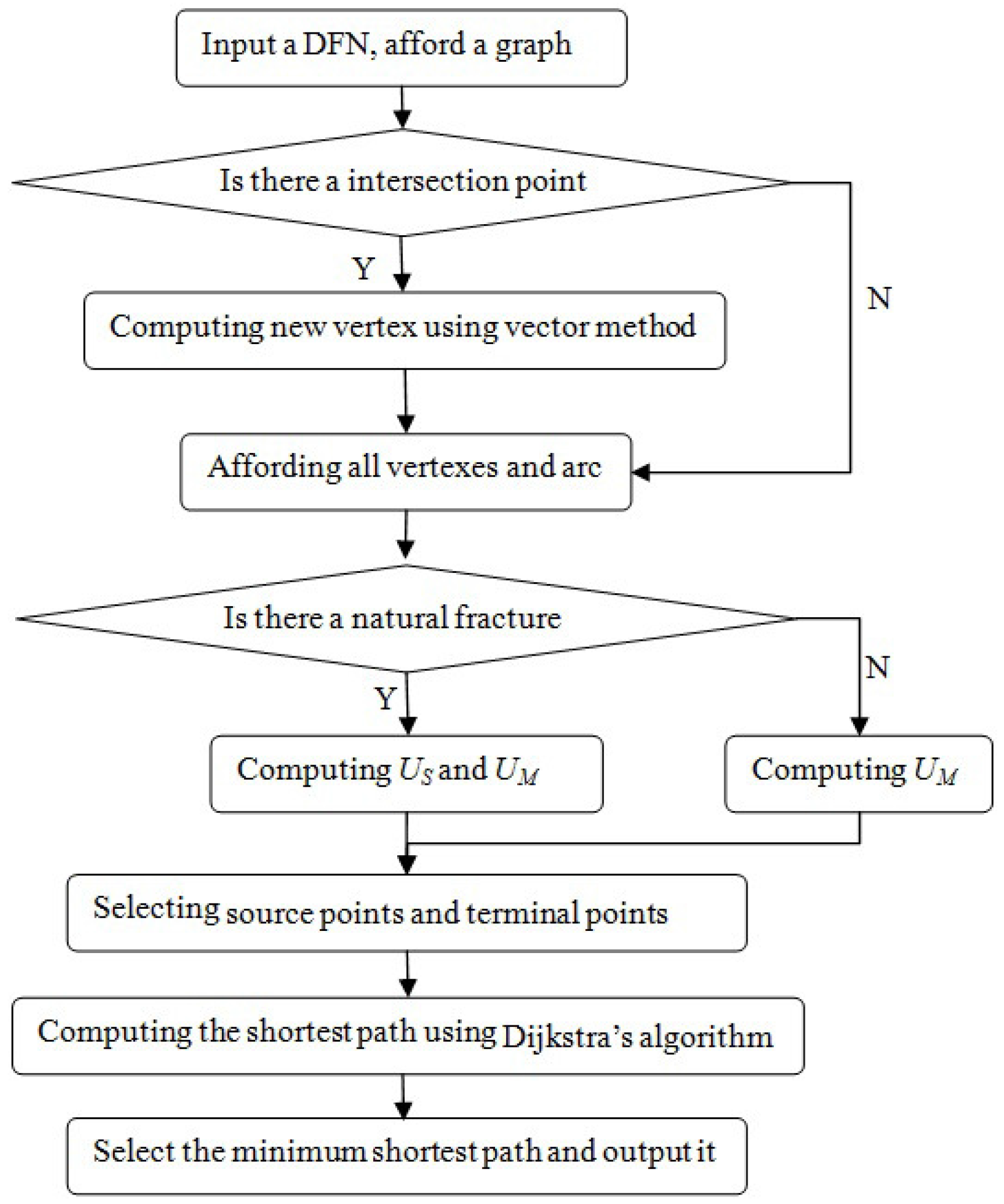
2. Preliminaries
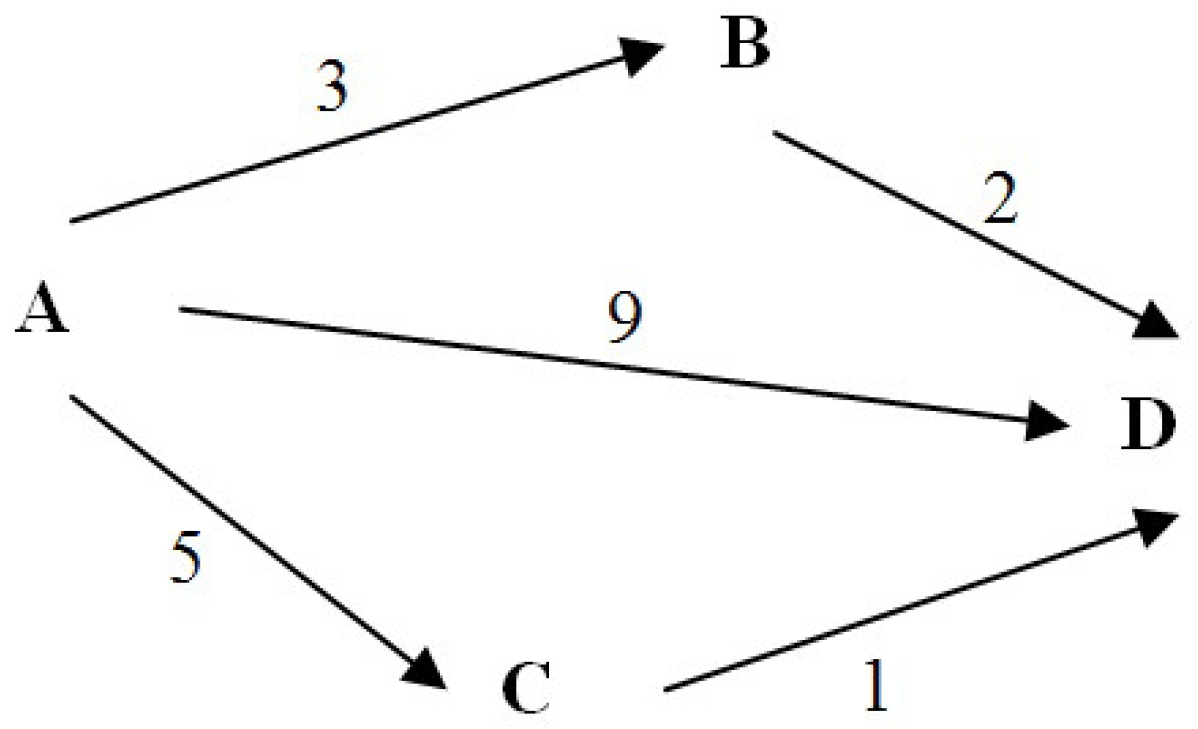
Dijkstra’s Algorithm
3. Model Description
3.1. Discrete Fracture Network
3.2. The Fracture Intersection Point
- (1)
- If and , then the two lines are collinear. If either or , then the two lines are overlapping.
- (2)
- If and , but neither nor , then the two lines are collinear but disjoint.
- (3)
- If and , then the two lines are parallel and non-intersecting.
- (4)
- If and , the two line segments meet at the point .
- (5)
- Otherwise, the two line segments are not parallel but intersect.
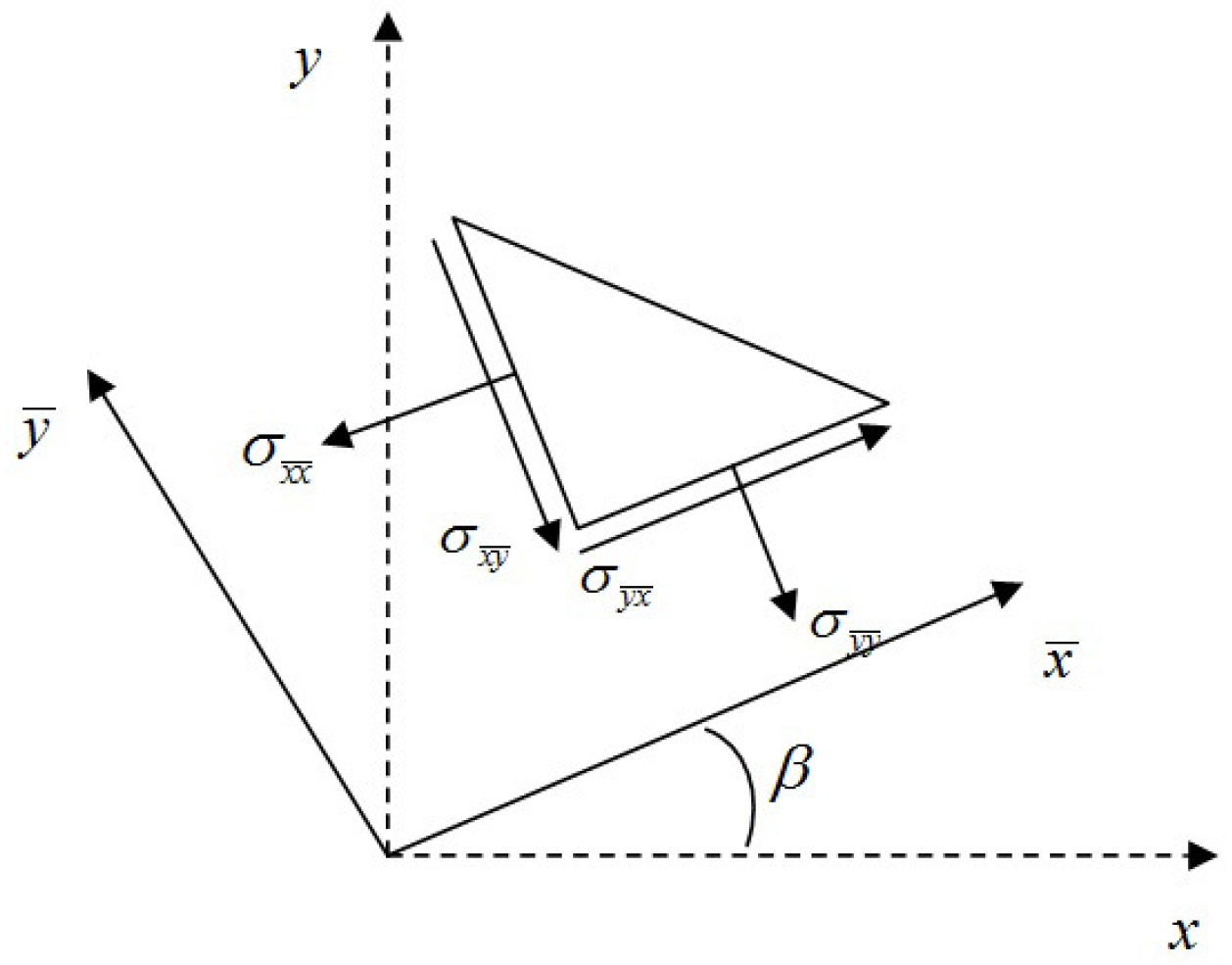
3.3. The Fracture Weighted Formula
4. Result of Numerical Modeling
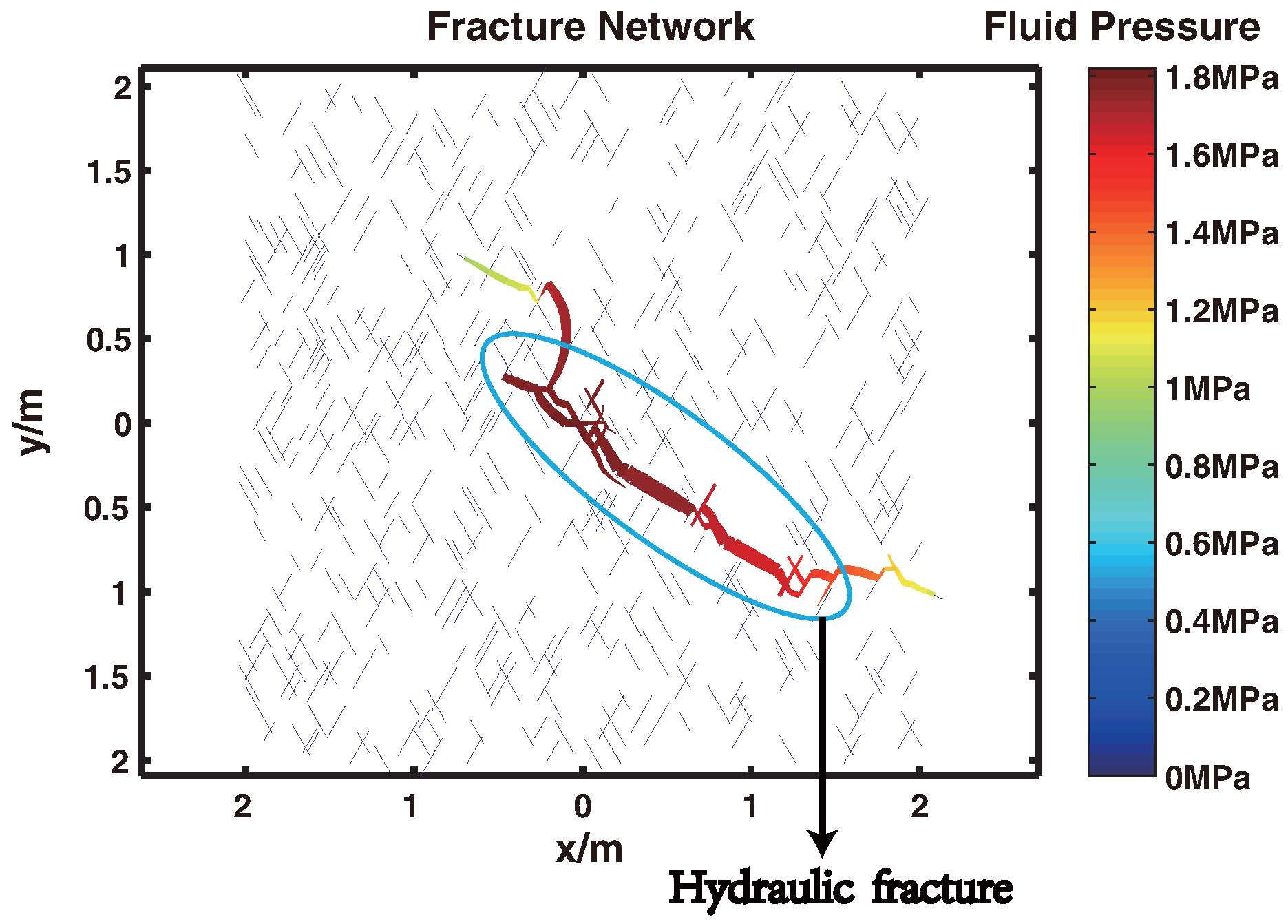
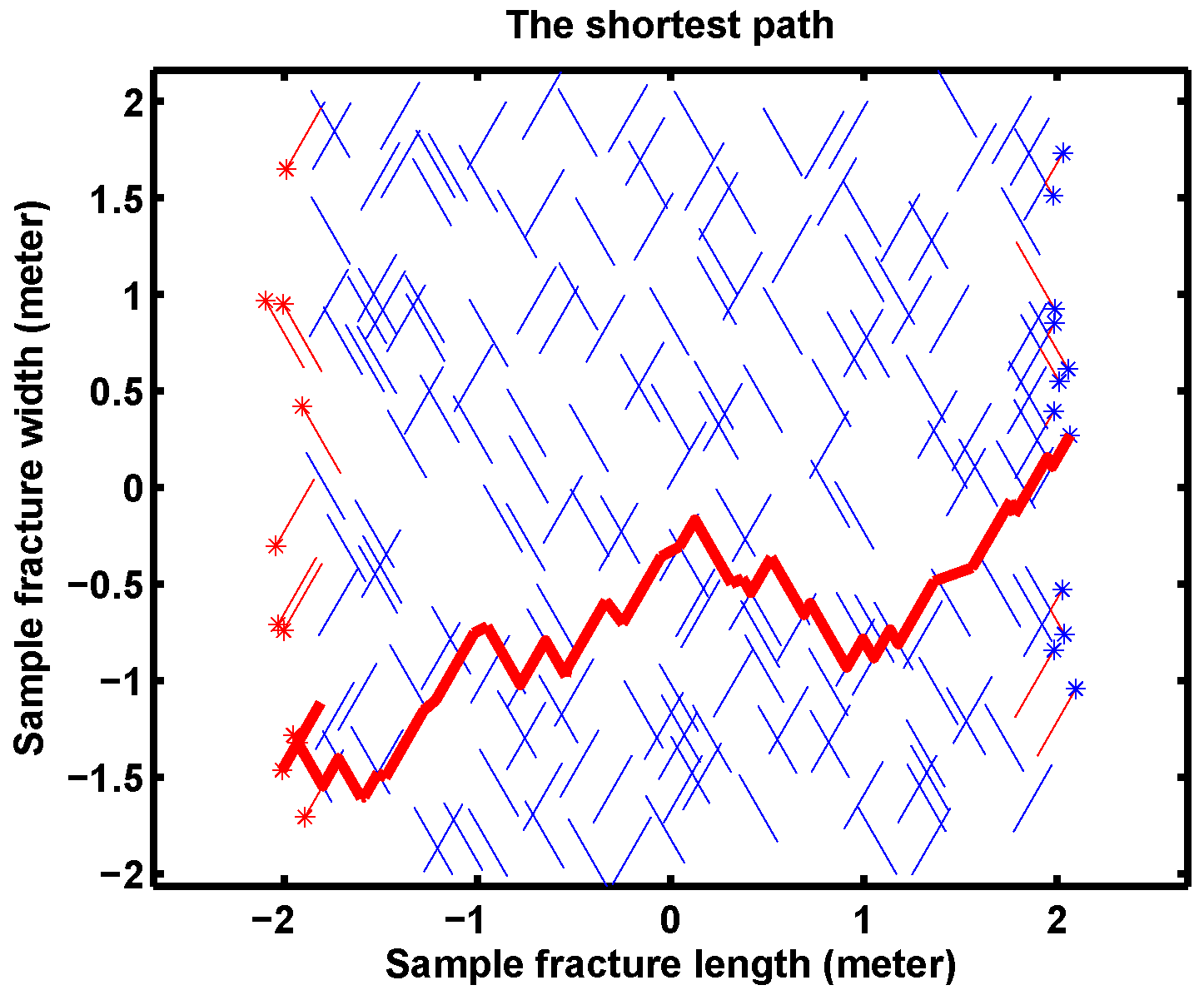
4.1. Determination of the Hydraulic Fracture
4.2. Experiment and Comparison
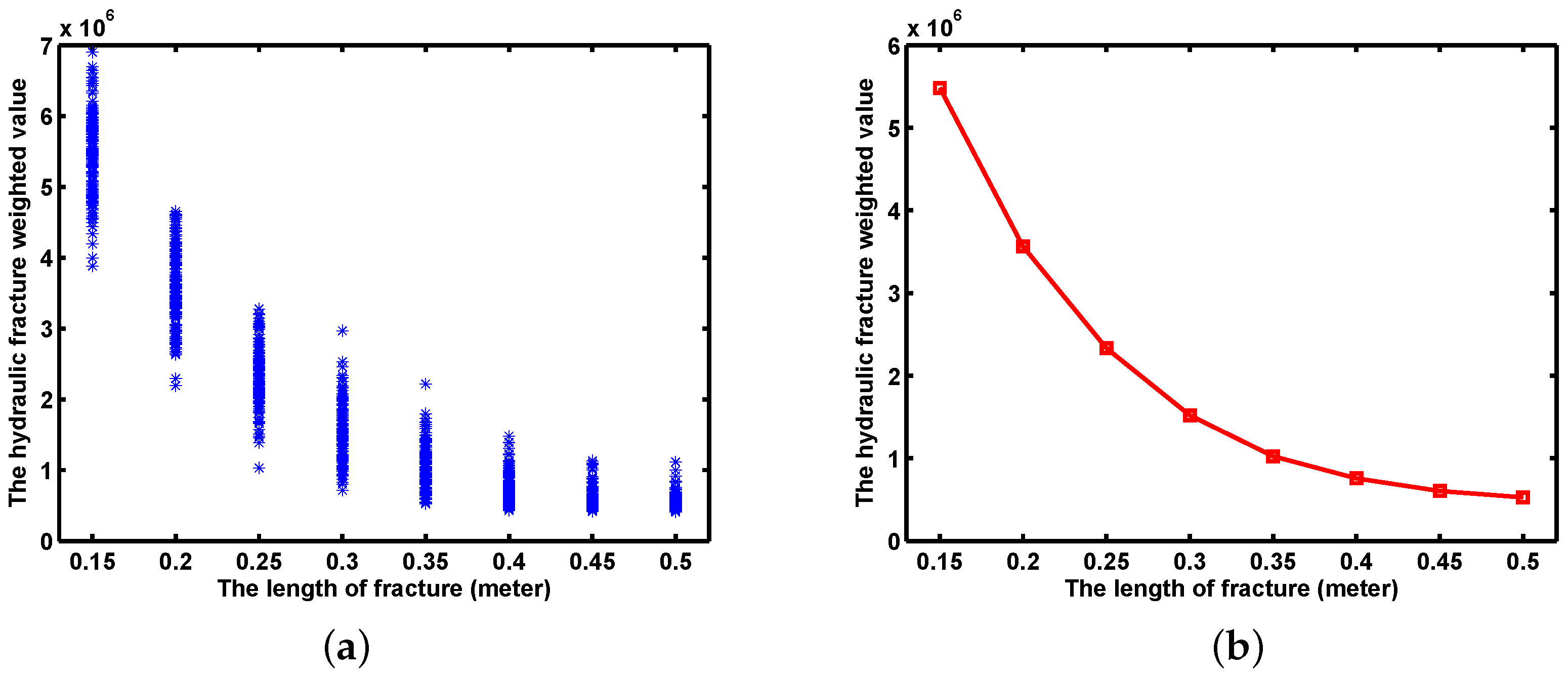
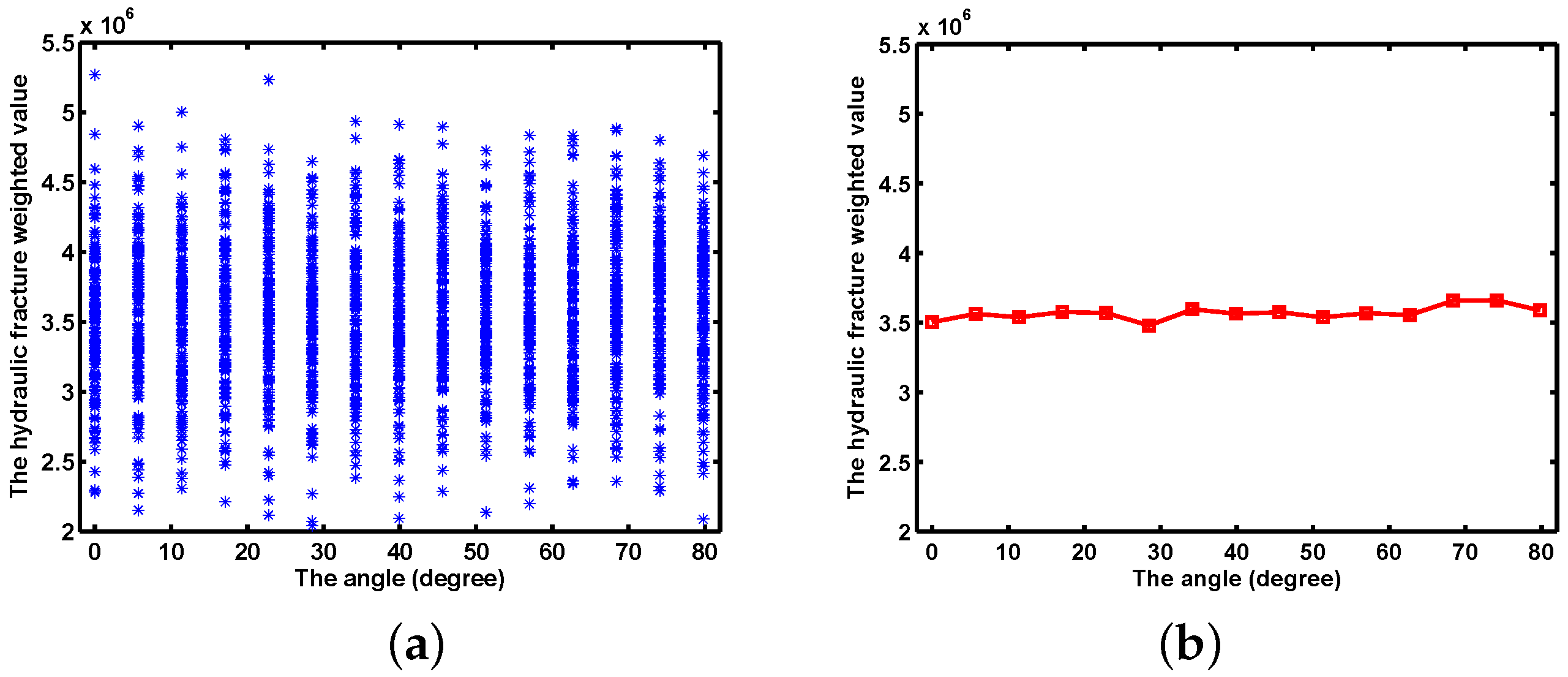
4.3. Parameter Sensitivity Analysis
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Veatch, R.W., Jr.; Moschovidis, Z.A.; Fast, C.R. An Overview of Hydraulic Fracturing, Recent Advances in Hydraulic Fracturing; Gidley, J.L., Holditch, S.A., Nierode, D.E., Veatch, R.W., Jr., Eds.; Society of Petroleum Engineers, Henry L Doherty Series Monograph: Beijing, China, 1986; Volume 12. [Google Scholar]
- Zhang, Z.; Li, X.; He, J.; Wu, Y.; Zhang, B. Numerical Analysis on the Stability of Hydraulic Fracture Propagation. Energies 2015, 8, 9860–9877. [Google Scholar] [CrossRef]
- Weng, X.W. Modeling of complex hydraulic fractures in naturally fractured formation. J. Unconv. Oil Gas Resour. 2015, 9, 114–135. [Google Scholar] [CrossRef]
- McClure, M.; Horne, R. Characterizing Hydraulic Fracturing with a Tendency-for-Shear-Stimulation Test. SPE Reserv. Eval. Eng. 2014, 11, 233–243. [Google Scholar] [CrossRef]
- Kresse, O.; Weng, X.W.; Gu, H.R. Numerical Modeling of Hydraulic Fractures Interaction in Complex Naturally Fractured Formations. Rock Mech. Rock Eng. 2013, 46, 555–568. [Google Scholar] [CrossRef]
- Mohammadnejad, T.; Khoei, A.R. An extended finite element method for hydraulic fracture propagation in deformable porous media with the cohesive crack model. Finite Elem. Anal. Design 2013, 73, 77–95. [Google Scholar] [CrossRef]
- Ferté, G.; Massina, P.; Moësba, N. 3D crack propagation with cohesive elements in the extended finite element method. Comput. Methods Appl. Mech. Eng. 2016, 300, 347–374. [Google Scholar]
- Fu, P.; Johnson, S.M.; Carrigan, C. An explicitly coupled hydro-geomechanical model for simulating hydraulic fracturing in complex discrete fracture networks. Int. J. Numer. Anal. Methods Geomech. 2012, 37, 2278–2300. [Google Scholar] [CrossRef]
- Verde, A.; Ghassemi, A. Modeling injection/extraction in a fracture network with mechanically interacting fractures using an efficient displacement discontinuity method. Int. J. Rock Mech. Min. Sci. 2015, 77, 278–286. [Google Scholar] [CrossRef]
- Dong, C.Y.; De Pater, C.J. Numerical implementation of displacement discontinuity method and its application in hydraulic fracturing. Comput. Methods Appl. Mech. Eng. 2001, 191, 745–760. [Google Scholar] [CrossRef]
- Behnia, M.; Goshtasbi, K.; Fatehi Marji, M.; Golshani, A. On the crack propagation modeling of hydraulic fracturing by a hybridized displacement discontinuity/boundary collocation method. J. Min. Environ. 2012, 2, 1–16. [Google Scholar]
- Bello, I.; Britton, J.R.; Kaul, A. Topics in Contemporary Mathematics. Chapter 15 (Graph Theory), 9th ed.; Richard Stratton: New York, NY, USA, 2008. [Google Scholar]
- Cherkassky, B.V.; Goldberg, A.V.; Radzik, T. Shortest paths algorithms: Theory and experimental evaluation. Math. Program. 1996, 73, 129–174. [Google Scholar] [CrossRef]
- Shirinivas, S.G.; Vetrivel, S.; Elango, N.M. Applications of graph theory in computer science an overview. Int. J. Eng. Sci. Technol. 2012, 2, 4610–4621. [Google Scholar]
- Klampfer, S.; Mohrko, J.; Cucej, Z.; Chowdhury, A. Graph’s theory approach for searching the shortest routing path in RIP protocol: A case study. Przeglad Elektrotech. 2012, 8, 224–231. [Google Scholar]
- Sarbu, I.; Valea, E.S. Application of operational research to determine optimal path for a water transmission main. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 13–15 March 2013.
- Falcao, A.X.; Stolfi, J.; de Alencar Lotufo, R. The image foresting transform: Theory, algorithms, and applications. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 19–29. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Camitz, M. Finding the shortest paths by node combination. Appl. Math. Comput. 2011, 217, 6401–6408. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, H.; Jiang, C.; Zhu, L. Improvement And Experimental Evaluation Bellman–Ford Algorithm. In 2013 International Conference on Advanced ICT and Education (ICAICTE-13); Atlantis Press: Paris, France, 2013. [Google Scholar]
- Garcia-Luna-Aceves, J.J. A minimum-hop routing algorithm based on distributed information. Comput. Netw. ISDN Syst. 1989, 16, 367–382. [Google Scholar] [CrossRef]
- Hougardy, S. The Floyd-Warshall algorithm on graphs with negative cycles. Inf. Process. Lett. 2010, 110, 279–281. [Google Scholar] [CrossRef]
- Snyder, V.; Sisam, C.H. Analytic Geometry Of Space. In Merchant Books; University of Michigan Library: Michigan, MI, USA, 2007. [Google Scholar]
- Stack Overflow. Available online: http://stackoverflow.com/questions/563198/how-do-you-detect-where-two-line-segments-intersect (accessed on 18 February 2009).
- McClure, M.; Horne, R.N. Discrete Fracture Network Modeling of Hydraulic Stimulation: Coupling Flow and Geomechanics; Springer Science & Business Media: London, UK, 2013. [Google Scholar]
- Lawn, B. Fracture of Brittle Solods; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Nehring, D. Natural gas from shale bursts onto the scene. Science 2010, 328, 1624–1626. [Google Scholar]
- Osborn, S.G.; Vengosh, A.; Warner, N.R.; Jackson, R.B. Methane contamination of drinking water accompanying gas-well drilling and hydraulic fracturing. Proc. Natl. Acad. Sci. USA 2011, 108, 8172–8176. [Google Scholar] [CrossRef] [PubMed]
- Kargbo, D.M.; Wilhelm, R.G.; Campbell, D.J. Natural gas plays in the Marcellus shale: Challenges and potential opportunities. Environ. Sci. Technol. 2010, 44, 5679–5684. [Google Scholar] [CrossRef] [PubMed]















© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Li, X. Numerical Simulation of the Propagation of Hydraulic and Natural Fracture Using Dijkstra’s Algorithm. Energies 2016, 9, 519. https://doi.org/10.3390/en9070519
Wu Y, Li X. Numerical Simulation of the Propagation of Hydraulic and Natural Fracture Using Dijkstra’s Algorithm. Energies. 2016; 9(7):519. https://doi.org/10.3390/en9070519
Chicago/Turabian StyleWu, Yanfang, and Xiao Li. 2016. "Numerical Simulation of the Propagation of Hydraulic and Natural Fracture Using Dijkstra’s Algorithm" Energies 9, no. 7: 519. https://doi.org/10.3390/en9070519
APA StyleWu, Y., & Li, X. (2016). Numerical Simulation of the Propagation of Hydraulic and Natural Fracture Using Dijkstra’s Algorithm. Energies, 9(7), 519. https://doi.org/10.3390/en9070519