Assembly Modulated by Particle Position and Shape: A New Concept in Self-Assembly

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results
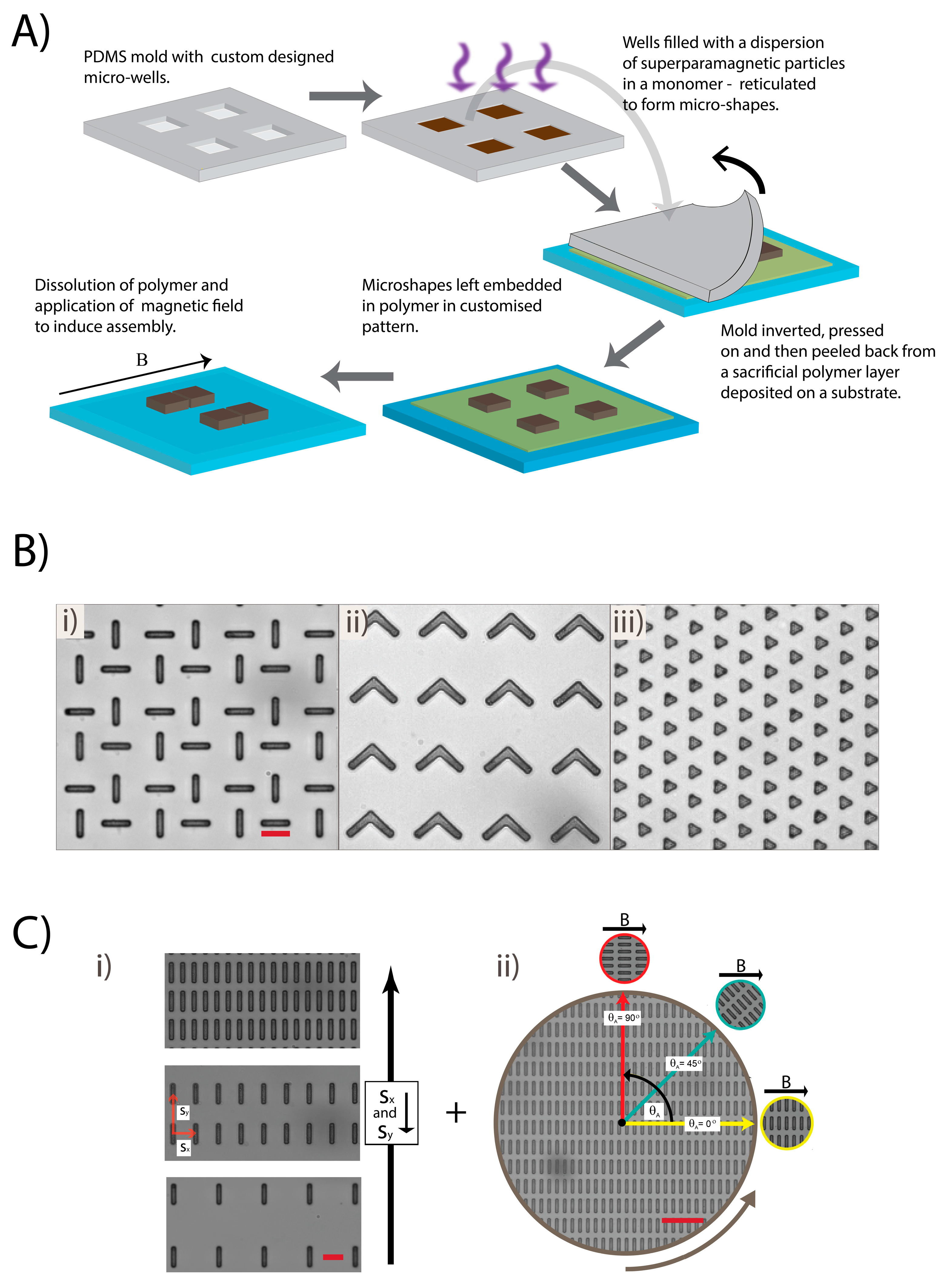
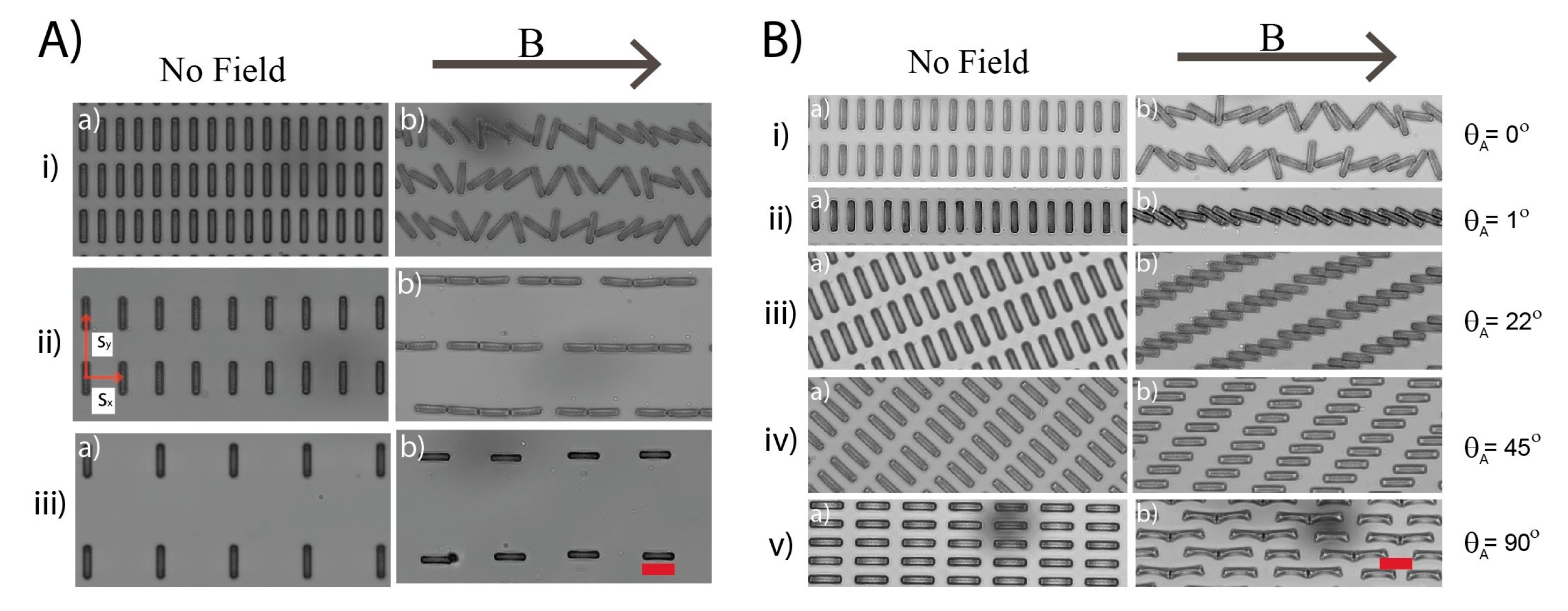
2.1. Self-Assembly Guided by a Magnetic Field Perpendicular to the Long Axis of the Cuboids
2.2. Varying the Initial Orientation of the Cuboids
3. Discussion
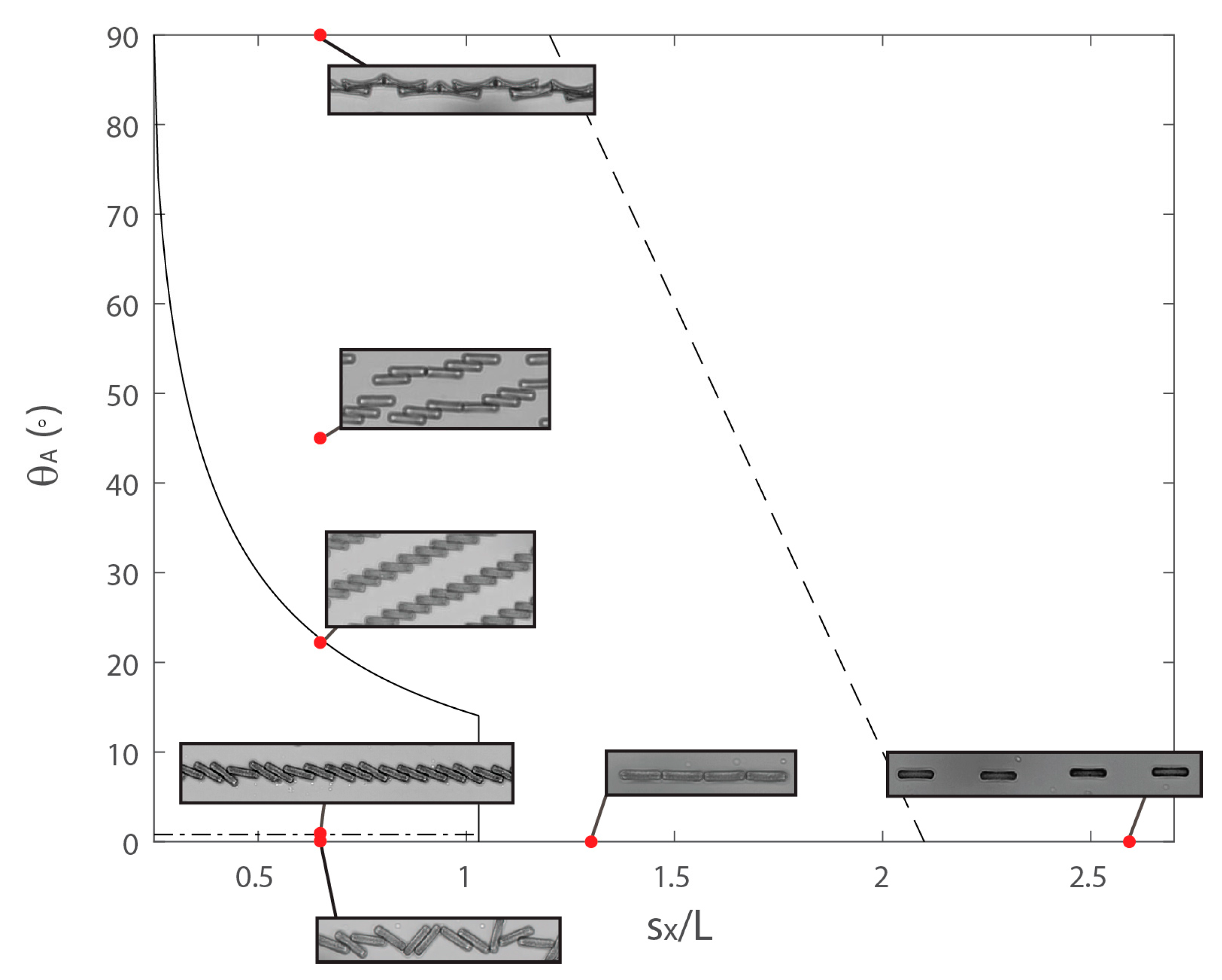
3.1. Phase Diagram
3.2. Towards Micro-Machines
4. Materials & Methods
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ariga, K.; Hill, J.P.; Ji, Q. Layer-by-Layer Assembly as a Versatile Bottom-up Nanofabrication Technique for Exploratory Research and Realistic Application. Phys. Chem. Chem. Phys. 2007, 9, 2319–2340. [Google Scholar] [CrossRef] [PubMed]
- Whitesides, G.M.; Grzybowski, B. Self-Assembly at All Scales. Science 2002, 295, 2418–2421. [Google Scholar] [CrossRef] [PubMed]
- De Gennes, P.-G.; Pincus, P. Pair Correlations in a Ferromagnetic Colloid. Phys. Kondens. Mater. 1970, 11, 189–198. [Google Scholar] [CrossRef]
- Yellen, B.B.; Friedman, G. Programmable Assembly of Colloidal Particles Using Magnetic Microwell Templates. Langmuir 2004, 20, 2553–2559. [Google Scholar] [CrossRef] [PubMed]
- Khalil, K.S.; Sagastegui, A.; Li, Y.; Tahir, M.A.; Socolar, J.E.S.; Wiley, B.J.; Yellen, B.B. Binary Colloidal Structures Assembled through Ising Interactions. Nat. Commun. 2012, 3, 794. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Bloom, M.; Bae, S.C.; Luijten, E.; Granick, S. Linking Synchronization to Self-Assembly Using Magnetic Janus Colloids. Nature 2012, 491, 578–581. [Google Scholar] [CrossRef] [PubMed]
- Velez, C.; Torres-Díaz, I.; Maldonado-Camargo, L.; Rinaldi, C.; Arnold, D.P. Magnetic Assembly and Cross-Linking of Nanoparticles for Releasable Magnetic Microstructures. ACS Nano 2015, 9, 10165–10172. [Google Scholar] [CrossRef] [PubMed]
- Ye, L.; Pearson, T.; Dolbashian, C.; Pstrak, P.; Mohtasebzadeh, A.R.; Fellows, B.; Mefford, O.T.; Crawford, T.M. Magnetic-Field-Directed Self-Assembly of Programmable Mesoscale Shapes. Adv. Funct. Mater. 2016, 26, 3983–3989. [Google Scholar] [CrossRef]
- Han, K.; Shields, C.W.; Diwakar, N.M.; Bharti, B.; López, G.P.; Velev, O.D. Sequence-Encoded Colloidal Origami and Microbot Assemblies from Patchy Magnetic Cubes. Sci. Adv. 2017, 3, e1701108. [Google Scholar] [CrossRef] [PubMed]
- Erb, R.M.; Son, H.S.; Samanta, B.; Rotello, V.M.; Yellen, B.B. Magnetic Assembly of Colloidal Superstructures with Multipole Symmetry. Nature 2009, 457, 999–1002. [Google Scholar] [CrossRef] [PubMed]
- Mayer, M.; Tebbe, M.; Kuttner, C.; Schnepf, M.J.; Koenig, T.A.F.; Fery, A. Template-Assisted Colloidal Self-Assembly of Macroscopic Magnetic Metasurfaces. Faraday Discuss. 2016, 191, 159–176. [Google Scholar] [CrossRef] [PubMed]
- Kavre, I.; Kostevc, G.; Kralj, S.; Vilfan, A.; Babic, D. Fabrication of Magneto-Responsive Microgears Based on Magnetic Nanoparticles Embedded PDMS. RSC Adv. 2014, 4, 38316–38322. [Google Scholar] [CrossRef]
- Paik, T.; Yun, H.; Fleury, B.; Hong, S.; Jo, P.S.; Wu, Y.; Kagan, C.R. Hierarchical Materials Design by Pattern Transfer Printing of Self-Assembled Binary Nanocrystal Superlattices. Nano Lett. 2017, 17, 1387–1394. [Google Scholar] [CrossRef] [PubMed]
- Choi, M.K.; Yang, J.; Kang, K.; Kim, D.C.; Choi, C.; Park, C.; Kim, S.J.; Chae, S.I.; Kim, T.; Kim, J.H.; et al. Intaglio Transfer Printing. Nat. Commun. 2015, 6, 1–8. [Google Scholar]
- Prins, F.; Sumitro, A.; Weidman, M.C.; Tisdale, W.A. Spatially Resolved Energy Transfer in Patterned Colloidal Quantum Dot Heterostructures. ACS Appl. Mater. Interfaces 2014, 6, 3111–3114. [Google Scholar] [CrossRef] [PubMed]
- Cui, Y.; Bjo, M.T.; Liddle, J.A.; So, C.; Boussert, B.; Alivisatos, A.P. Integration of Colloidal Nanocrystals into Lithographically Patterned Devices. Nano Lett. 2004, 4, 1093–1098. [Google Scholar] [CrossRef]
- Yin, Y.; Lu, Y.; Gates, B.; Xia, Y.; April, R.V. Template-Assisted Self-Assembly: A Practical Route to Complex Aggregates of Monodispersed Colloids with Well-Defined Sizes, Shapes, and Structures. J. Am. Chem. Soc. 2001, 25, 8718–8729. [Google Scholar] [CrossRef]
- Palagi, S.; Mark, A.G.; Reigh, S.Y.; Melde, K.; Qiu, T.; Zeng, H.; Parmeggiani, C.; Martella, D.; Sanchez-Castillo, A.; Kapernaum, N.; et al. Structured Light Enables Biomimetic Swimming and Versatile Locomotion of Photoresponsive Soft Microrobots. Nat. Mater. 2016, 15, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Palagi, S.; Mark, A.G.; Melde, K.; Zeng, H.; Parmeggiani, C.; Martella, D.; Wiersma, D.S.; Fischer, P. Soft Continuous Microrobots with Multiple Intrinsic Degrees of Freedom. In Proceedings of the 2016 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Paris, France, 18–22 July 2016. [Google Scholar]
- Aranson, I. Swimmers by Design. Nature 2016, 531, 6–7. [Google Scholar] [CrossRef] [PubMed]
- Diller, E. Micro-Scale Mobile Robotics. Found. Trends Robot. 2011, 2, 143–259. [Google Scholar] [CrossRef]
- Tasoglu, S.; Diller, E.; Guven, S.; Sitti, M.; Demirci, U. Untethered Micro-Robotic Coding of Three-Dimensional Material Composition. Nat. Commun. 2014, 5, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Breguet, J.; Johansson, S.; Driesen, W.; Simu, U. A Review on Actuation Principles for Few Cubic Millimeter Sized Mobile Micro-Robots. In Proceedings of the 10th International Conference on New Actuators (Actuator 2006), Bremen, Germany, 14–16 June 2006; pp. 374–381. [Google Scholar]
- Stanton, M.M.; Trichet-Paredes, C.; Sanchez, S. Applications of Three-Dimensional (3D) Printing for Microswimmers and Bio-Hybrid Robotics. Lab Chip 2015, 15, 1634–1637. [Google Scholar] [CrossRef] [PubMed]
- Ye, Z.; Régnier, S.; Sitti, M. Rotating Magnetic Miniature Swimming Robots with Multiple Flexible Flagella. IEEE Trans. Robot. 2014, 30, 3–13. [Google Scholar]
- Khalil, I.S.M.; Dijkslag, H.C.; Abelmann, L.; Misra, S. MagnetoSperm: A Microrobot That Navigates Using Weak Magnetic Fields. Appl. Phys. Lett. 2014, 104, 3–6. [Google Scholar] [CrossRef]
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for Minimally Invasive Medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [PubMed]
- Tierno, P. Recent Advances in Anisotropic Magnetic Colloids: Realization, Assembly and Applications. Phys. Chem. Chem. Phys. 2014, 16, 23515–23528. [Google Scholar] [CrossRef] [PubMed]
- Tavacoli, J.W.; Bauër, P.; Fermigier, M.; Bartolo, D.; Heuvingh, J.; du Roure, O. The Fabrication and Directed Self-Assembly of Micron-Sized Superparamagnetic Non-Spherical Particles. Soft Matter 2013, 9, 9103–9110. [Google Scholar] [CrossRef]
- Tavacoli, J.; Brown, A.; Bauër, P.; du Roure, O.; Heuvingh, J. Solid Microscopic Rings Formed via Wetting and Subsequent Dewetting. RSC Adv. 2016, 6, 62624–62629. [Google Scholar] [CrossRef]
- Ommering, K. Dynamics of Individual Magnetic Particles Near a Biosensor Surface; Technische Universiteit Eindhoven: Eindhoven, The Netherlands, 2012. [Google Scholar]
- Johnson, A.K.; Zawadzka, A.M.; Deobald, L.A.; Crawford, R.L.; Paszczynski, A.J. Novel Method for Immobilization of Enzymes to Magnetic Nanoparticles. J. Nanopart. Res. 2008, 10, 1009–1025. [Google Scholar] [CrossRef]
- Helgesen, G.; Skjeltorp, A.T.; Mors, P.M.; Botet, R.; Jullien, R. Aggregation of Magnetic Microspheres: Experiments and Simulations. Phys. Rev. Lett. 1988, 61, 1736–1739. [Google Scholar] [CrossRef] [PubMed]
- Chantrell, R.W.; Bradbury, A.; Popplewell, J.; Charles, S.W. Agglomerate Formation in a Magnetic Fluid. J. Appl. Phys. 1982, 53, 2742–2744. [Google Scholar] [CrossRef]
- Chantrell, R.W.; Bradbury, A.; Popplewell, J.; Charles, S.W. Particle Cluster Configuration in Magnetic Fluids. J. Phys. D Appl. Phys. 1980, 13, L119. [Google Scholar] [CrossRef]
- Banerjee, U.; Bit, P.; Ganguly, R.; Hardt, S. Aggregation Dynamics of Particles in a Microchannel due to an Applied Magnetic Field. Microfluid. Nanofluid. 2012, 13, 565–577. [Google Scholar] [CrossRef]
- Dreyfus, R.; Baudry, J.; Roper, M.L.; Fermigier, M.; Stone, H.; Bibette, J. Microscopic Artificial Swimmers. Nature 2005, 437, 862–865. [Google Scholar] [CrossRef] [PubMed]





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tavacoli, J.W.; Heuvingh, J.; Du Roure, O. Assembly Modulated by Particle Position and Shape: A New Concept in Self-Assembly. Materials 2017, 10, 1291. https://doi.org/10.3390/ma10111291
Tavacoli JW, Heuvingh J, Du Roure O. Assembly Modulated by Particle Position and Shape: A New Concept in Self-Assembly. Materials. 2017; 10(11):1291. https://doi.org/10.3390/ma10111291
Chicago/Turabian StyleTavacoli, Joe W., Julien Heuvingh, and Olivia Du Roure. 2017. "Assembly Modulated by Particle Position and Shape: A New Concept in Self-Assembly" Materials 10, no. 11: 1291. https://doi.org/10.3390/ma10111291
APA StyleTavacoli, J. W., Heuvingh, J., & Du Roure, O. (2017). Assembly Modulated by Particle Position and Shape: A New Concept in Self-Assembly. Materials, 10(11), 1291. https://doi.org/10.3390/ma10111291