Study on the Viscoelasticity Measurement of Materials Based on Surface Reflected Waves

 ,
,
Abstract
:1. Introduction
2. SRM Theory
2.1. Viscoelasticity Evaluation
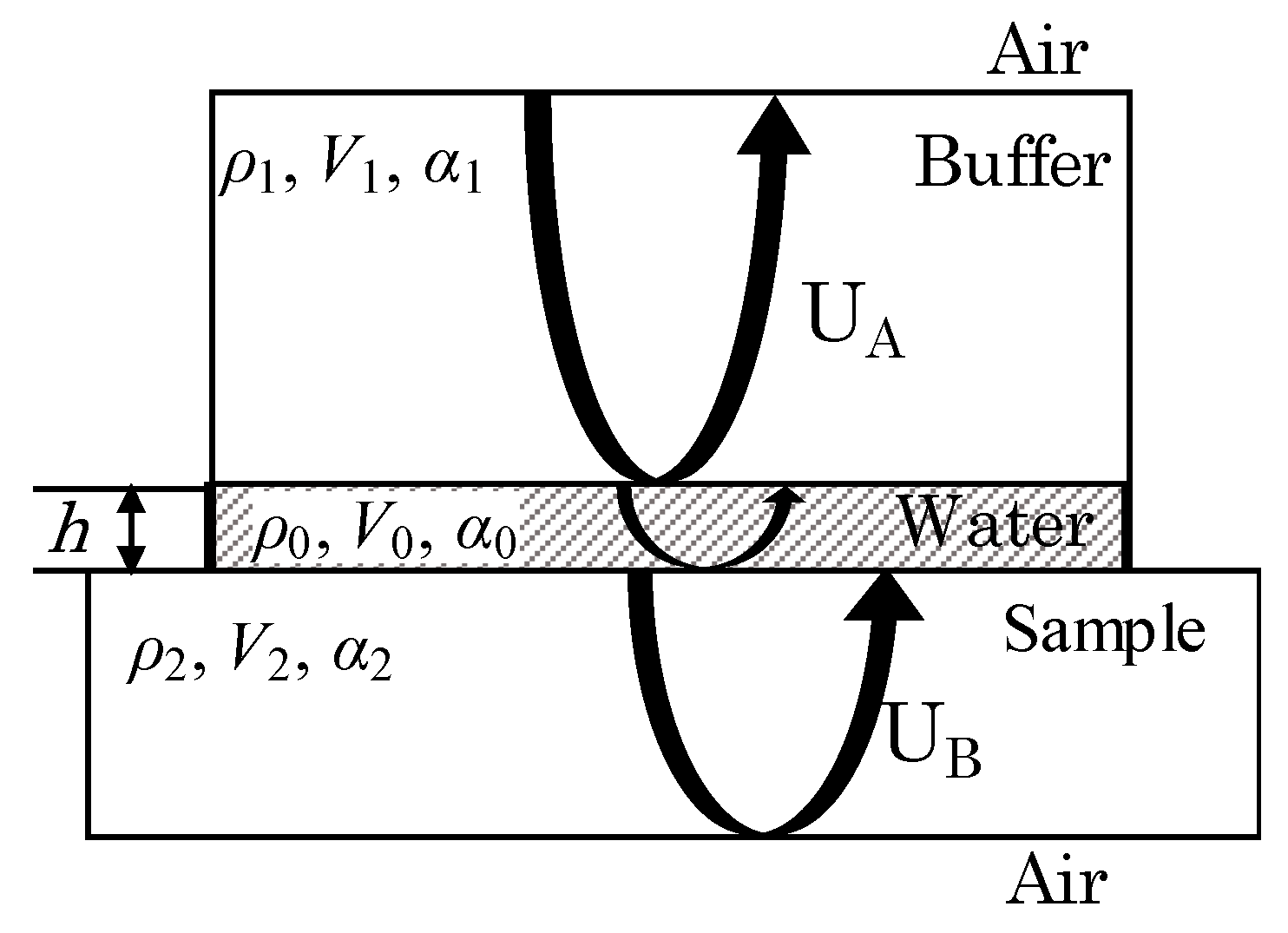
2.2. Influence of the Coupling Layer
3. Viscoelastic Evaluation and Optimization
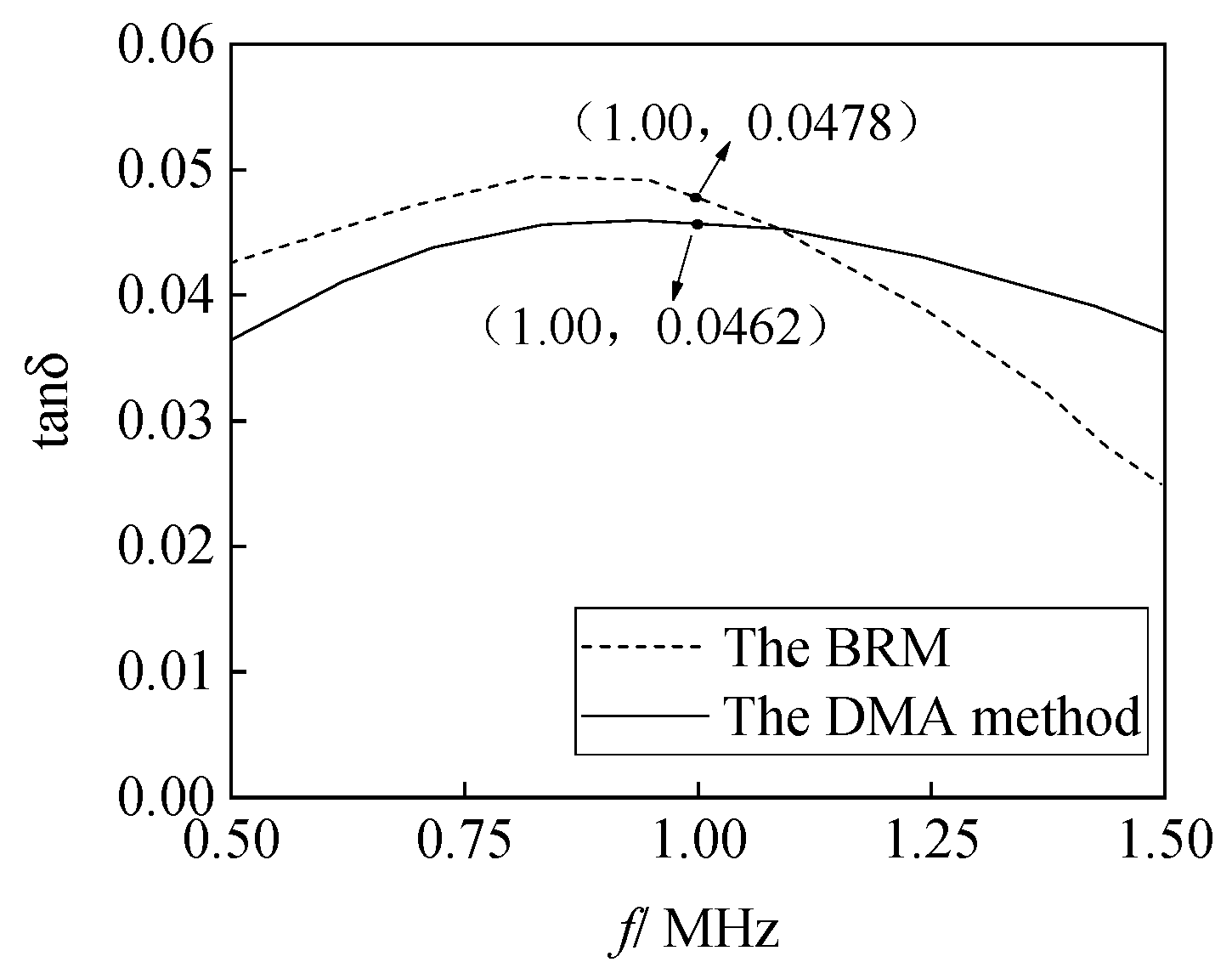
3.1. Comparison with Traditional DMA Method
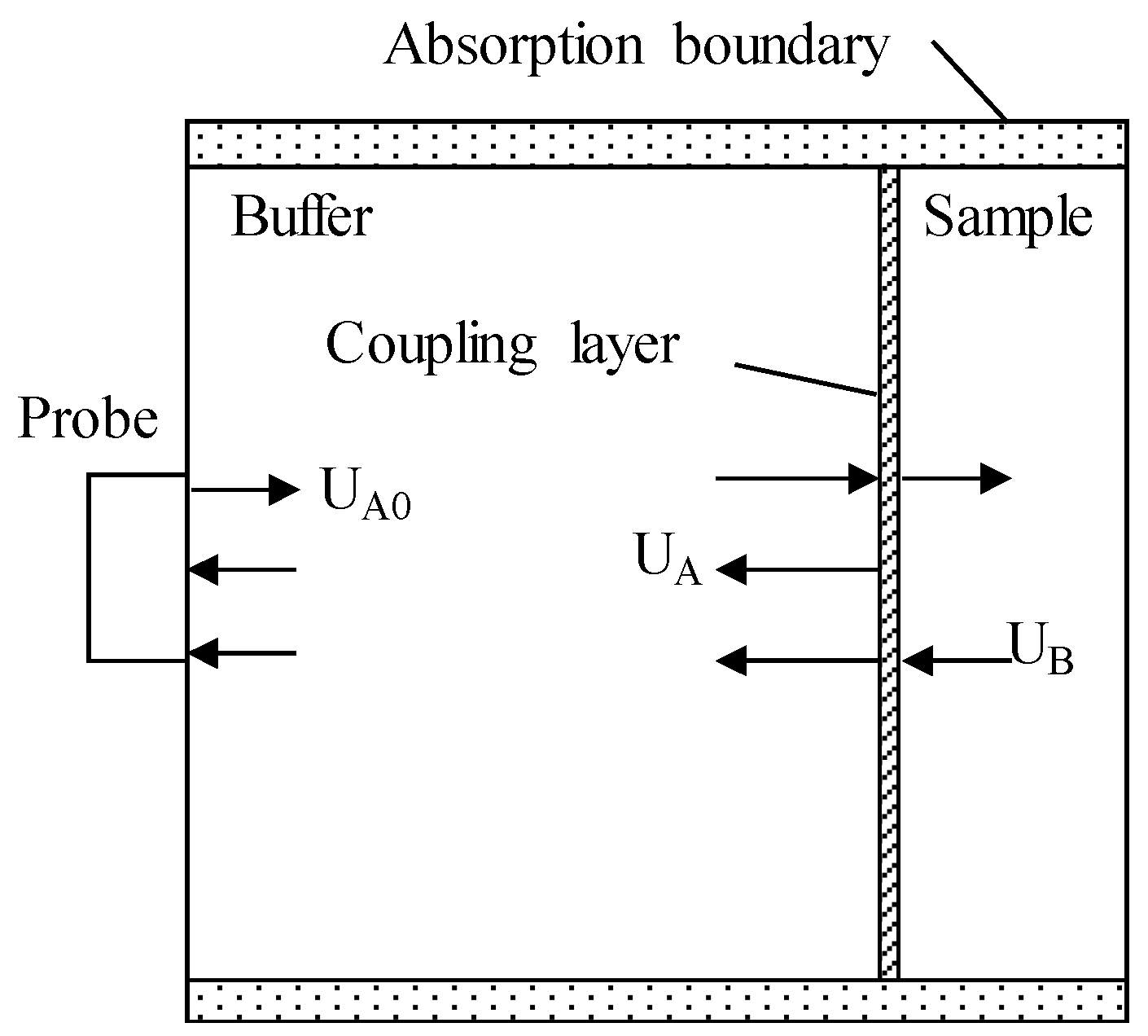
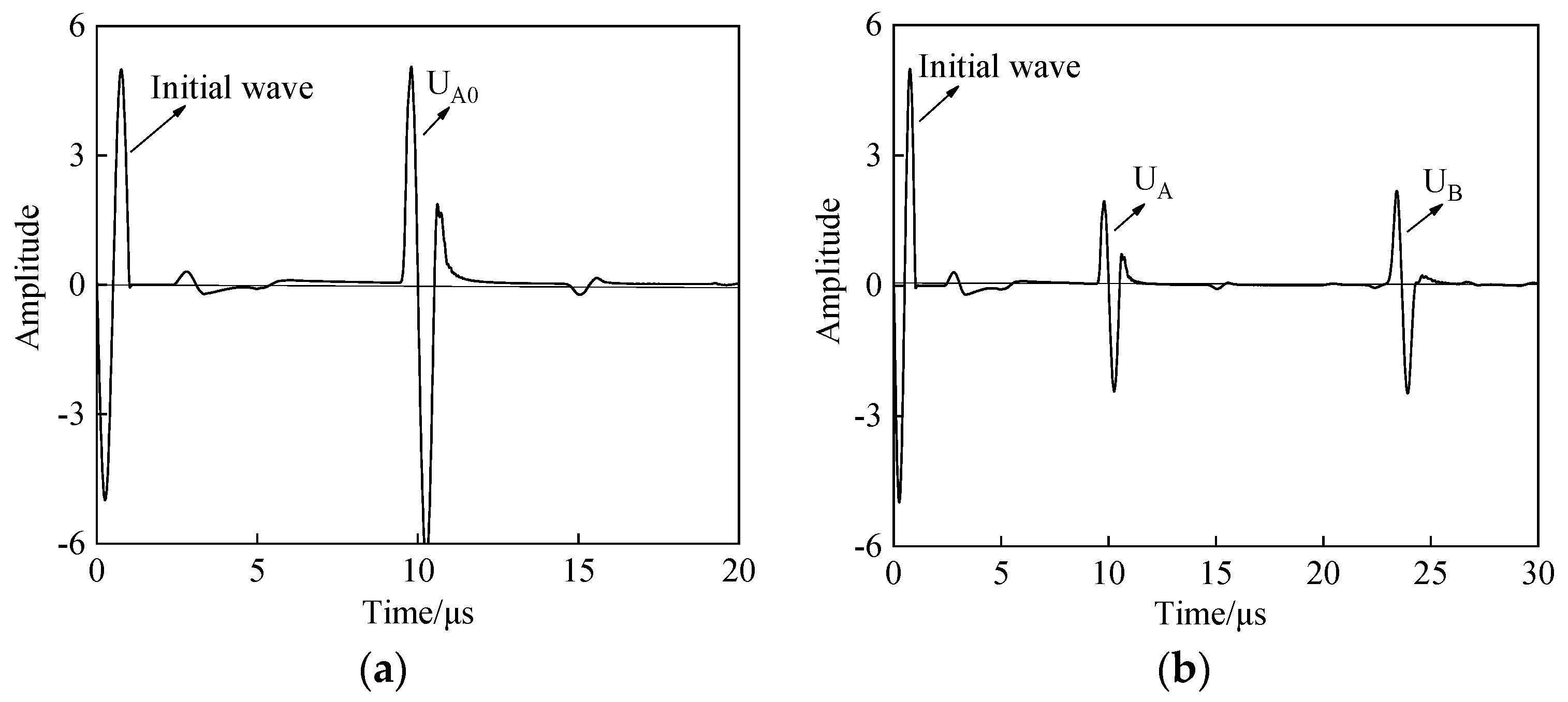
3.2. Simulation
3.3. Experimental Verification
4. Application of Density Measurement by the SRM
4.1. Theoretical Analysis
4.2. Theoretical Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hunt, J.D.; Alliger, G. Rubber—Application of radiation to tire manufacture. Radiat. Phys. Chem. 1979, 14, 39–53. [Google Scholar] [CrossRef]
- Yoon, S.C.; Sang, H.C.; Kim, J.G. Application of the rubber panel structure for railway crossings. Key Eng. Mater. 2007, 353, 2753–2757. [Google Scholar] [CrossRef]
- Huang, Y.H.; Shi, Y.; Xue, L.; Geng, X.L.; Su, Z.T.; Wang, J.H. Research and application progress of silicone rubber materials in aviation. J. Aeronaut. Mater. 2016, 36, 79–91. [Google Scholar]
- Ramirez, B.J.; Gupta, V. Evaluation of novel temperature-stable viscoelastic polyurea foams as helmet liner materials. Mater. Des. 2018, 137, 298–304. [Google Scholar] [CrossRef]
- Yue, Z.; Dai, C.; Yao, Q.; Fan, X.; Jiang, J.; Wu, Y.; Wu, X.; Huang, Y.; Zhao, M. Rheological properties and formation dynamic filtration damage evaluation of a novel nanoparticle-enhanced VES fracturing system constructed with wormlike micelles. Colloids Surf. A Physicochem. Eng. Asp. 2018, 8, 244–252. [Google Scholar]
- Nakajima, N. Mixing of rubber and viscoelasticity—III. Viscoelastic characterization of gum rubber. Polym. Int. 2003, 36, 105–116. [Google Scholar] [CrossRef]
- Chadwick, P.; Creasy, C.F.M. Modified entropic elasticity of rubberlike materials. J. Mech. Phys. Solids 1984, 32, 337–357. [Google Scholar] [CrossRef]
- Grassie, N.; Guy, M.I.; Tennent, N.H. Degradation of epoxy polymers: 2—Mechanism of thermal degradation of bisphenol—A diglycidyl ether. Polym. Degrad. Stab. 1985, 13, 11–20. [Google Scholar] [CrossRef]
- Barral, L.; Cano, J.; López, A.J.; López, J.; Nogueira, P.; Ramírez, C. Dynamic mechanical analysis. J. Therm. Anal. 1995, 45, 1167–1174. [Google Scholar] [CrossRef]
- Naim, A.A.; Elbary, A.M.A.; Ibrahim, S.S. Dynamic mechanical analysis and non-isothermal kinetics of EVA/PPy carbon black nanocomposites. Mater. Sci. Technol. 2019, 35, 560–570. [Google Scholar] [CrossRef]
- Chang, J.J.; Lin, C.X.; Sun, D.P. Ultrasonic evaluation of viscoelasticity of rubber friction materials. Lubr. Eng. 2007, 32, 55–58. [Google Scholar]
- Sridhar, M.; Liu, J.; Insana, M.F. Viscoelasticity imaging using ultrasound: Parameters and error analysis. Phys. Med. Biol. 2007, 52, 2425–2443. [Google Scholar] [CrossRef] [PubMed]
- Sinkus, R.; Bercoff, J.; Tanter, M.; Gennisson, J.L. Nonlinear viscoelastic properties of tissue assessed by ultrasound. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2006, 53, 2009–2018. [Google Scholar] [CrossRef] [PubMed]
- Zeng, X.F.; Chang, J.J.; Lu, C.; Li, G.Y.; Luo, G.S. Viscoelasticity evaluation of composite materials based on air coupled ultrasound. Appl. Acoust. 2019, 38, 105–113. [Google Scholar]
- Wang, S.K.; Hsu, T.W.; Weng, W.K.; Ou, S.H. A three-point method for estimating wave reflection of obliquely incident waves over a sloping bottom. Coast. Eng. 2007, 55, 125–138. [Google Scholar] [CrossRef]
- Wang, X.G.; Wu, W.L.; Huang, Z.C.; Chang, J.J.; Wu, N.X. Research on the transmission characteristics of air-coupled ultrasound in double-layered bonded structures. Materials 2018, 11, 310. [Google Scholar] [CrossRef]
- Wu, W.L.; Wang, X.G.; Huang, Z.C.; Wu, N.X. Measurements of the weak bonding interfacial stiffness by using air-coupled ultrasound. Aip Adv. 2017, 7, 125–316. [Google Scholar] [CrossRef]
- Abera, M.K.; Verboven, P.; Defraeye, T.; Fanta, S.W.; Hertog, M.L.A.T.M.; Carmeliet, J.; Nicolai, B.M. A plant cell division algorithm based on cell biomechanics and ellipse-fitting. Ann. Bot. 2014, 114, 605–617. [Google Scholar] [CrossRef] [Green Version]
- Gunasekaran, S.; Ak, M.M. Dynamic oscillatory shear testing of foods—Selected applications. Trends Food Sci. Technol. 2000, 11, 115–127. [Google Scholar] [CrossRef]
- Kendall, J.; Monroe, K.P. The viscosity of liquids. III. Ideal solutions of solids in liquids. J. Am. Chem. Soc. 2002, 39, 1802–1806. [Google Scholar] [CrossRef]
- Kirkpatrick, T.R.; Thirumalai, D.; Wolynes, P.G. Scaling concepts for the dynamics of viscous liquids near an ideal glassy state. Phys. Rev. A 1989, 40, 1045–1054. [Google Scholar] [CrossRef] [Green Version]
- Gay, N.C. The motion of rigid particles embedded in a viscous fluid during pure shear deformation of the fluid. Tectonophysics 1968, 5, 81–88. [Google Scholar] [CrossRef]
- Norris, A.N. Pure shear axes and elastic strain energy. Q. J. Mech. Appl. Math. 2006, 59, 551–561. [Google Scholar] [CrossRef]
- Holzapfel, G.A.; Simo, J.C. Entropy elasticity of isotropic rubber-like solids at finite strains. Comput. Methods Appl. Mech. Eng. 1996, 132, 17–44. [Google Scholar] [CrossRef]
- Viswanath, D.S.; Ghosh, T.K.; Prasad, D.H.L.; Dutt, N.V.K.; Rani, K.Y. Viscosity of liquids. AICHE J. 2007, 2, 290–295. [Google Scholar]
- Aköz, A.Y.; Kadıoğlu, F.; Tekin, G. Quasi-static and dynamic analysis of viscoelastic plates. Mech. Time Depend. Mater. 2015, 19, 483–503. [Google Scholar] [CrossRef]
- Lubliner, J. A model of rubber viscoelasticity. Mech. Res. Commun. 1985, 12, 93–99. [Google Scholar] [CrossRef]
- Weaver, R.L.; Sachse, W.; Niu, L. Transient ultrasonic waves in a viscoelastic plate: Theory. J. Acoust. Soc. Am. 1989, 85, 2255. [Google Scholar] [CrossRef]
- Mason, W.P.; Baker, W.O.; Mcskimin, H.J.; Heiss, J.H. Measurement of shear elasticity and viscosity of liquids at ultrasonic frequencies. Phys. Rev. 1949, 75, 936–946. [Google Scholar] [CrossRef]
- Morozov, I.B. Anelastic acoustic impedance and the correspondence principle. Geophys. Prospect. 2015, 59, 24–34. [Google Scholar] [CrossRef]
- Joshi, D.; Kumar, A.; Gupta, R.; Yadav, S. Sensitivity enhancement of concurrent technique of acoustic impedance measurement. Mapan 2013, 28, 79–83. [Google Scholar] [CrossRef]
- Cahng, J.J. Ultrasonic evaluation of viscoelasticity of polymer composites. Nondestruct. Test. 2007, 29, 57–59. [Google Scholar]
- Wei, Q. Measuring and Testing Technologies And Instruments. Master’s Thesis, Nanchang Hangkong University, Nanchang, China, June 2016. [Google Scholar]
- Browne, M.W. Predictive validity of a linear regression equation. Br. J. Math. Stat. Psychol. 2011, 28, 79–87. [Google Scholar] [CrossRef]
- Ma, Q. Goodness-of-fit of a linear regression equation through origin. J. Beijing For. Univ. 1992, 14, 105–107. [Google Scholar]
- Bensch, J.J.; Brynard, H.J. New approach to density measurements using Archimedes’s principle. Nature 1972, 239, 96. [Google Scholar] [CrossRef]
- Keenan, M.J.; Hegsted, M.; Jones, K.L.; Delany, J.P.; Kime, J.C.; Melancon, L.E.; Tulley, R.T.; Hong, K.D. Comparison of bone density measurement techniques: DXA and Archimedes’ principle. J. Bone Miner. Res. 2010, 12, 1903–1907. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Density by Reflection Coefficient (g/cm3) | Density by the Archimedes Method (g/cm3) | Difference (%) |
|---|---|---|---|
| EPX24 | 0.90 | 0.93 | 2.9 |
| EPX46 | 0.95 | 0.98 | 3.2 |
| EPX45 | 0.98 | 1.02 | 3.6 |
| OR3C | 0.98 | 1.04 | 5.5 |
| OR3Si | 1.03 | 1.07 | 3.7 |
| OR4C | 1.01 | 1.06 | 4.6 |
| OR4Si | 1.05 | 1.08 | 2.6 |
| ORHS3C | 0.93 | 1.03 | 9.7 |
| ORHS3Si | 0.93 | 1.02 | 8.8 |
| ORHS4C | 0.95 | 1.05 | 9.5 |
| ORHS4Si | 0.96 | 1.07 | 10.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, J.-j.; Li, Y.-y.; Zeng, X.-f.; Zhong, H.-y.; Wan, T.-l.; Lu, C. Study on the Viscoelasticity Measurement of Materials Based on Surface Reflected Waves. Materials 2019, 12, 1875. https://doi.org/10.3390/ma12111875
Chang J-j, Li Y-y, Zeng X-f, Zhong H-y, Wan T-l, Lu C. Study on the Viscoelasticity Measurement of Materials Based on Surface Reflected Waves. Materials. 2019; 12(11):1875. https://doi.org/10.3390/ma12111875
Chicago/Turabian StyleChang, Jun-jie, Yuan-yuan Li, Xue-feng Zeng, Hai-ying Zhong, Tao-lei Wan, and Chao Lu. 2019. "Study on the Viscoelasticity Measurement of Materials Based on Surface Reflected Waves" Materials 12, no. 11: 1875. https://doi.org/10.3390/ma12111875
APA StyleChang, J. -j., Li, Y. -y., Zeng, X. -f., Zhong, H. -y., Wan, T. -l., & Lu, C. (2019). Study on the Viscoelasticity Measurement of Materials Based on Surface Reflected Waves. Materials, 12(11), 1875. https://doi.org/10.3390/ma12111875