Deformation Wave Theory and Application to Optical Interferometry


Abstract
:1. Introduction
2. Field Theory of Deformation and Fracture
2.1. Field Theory Overview
2.2. Field Equations
2.3. Deformation Stage Criteria
2.3.1. Linear Elastic Deformation
2.3.2. Plastic Deformation
2.3.3. Fracture
3. Optical Method
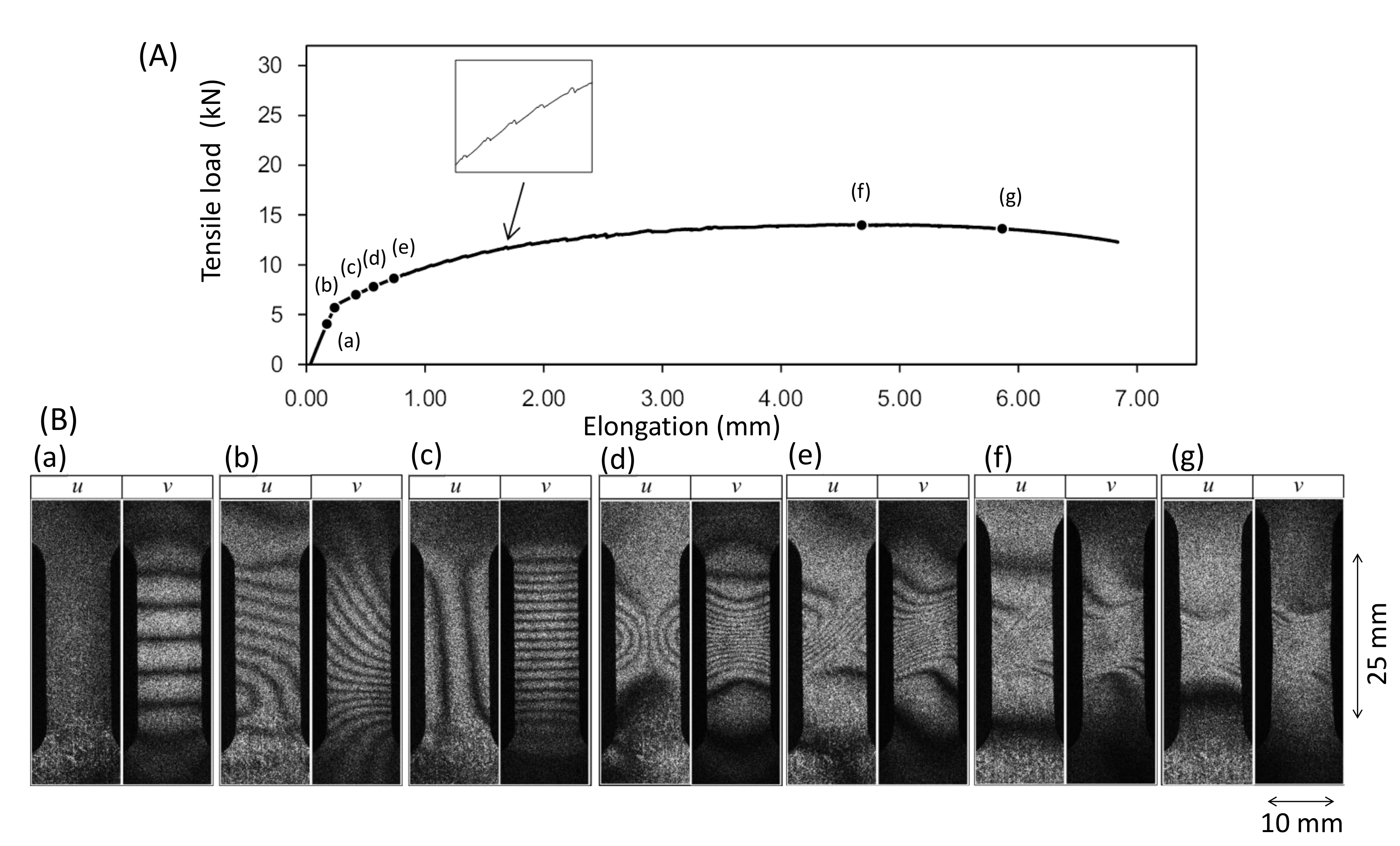
ESPI Fringe Pattern as Indicator of Deformation Evolution
- Point (a); Pre-Yield stagePrior to the yield point the dark fringes observed in the u and v- fringe patterns are linear.
- Point (b); Yield pointAt the yield point the fringes become curved. The fringe pattern is asymmetric for both the u-pattern and v-pattern.
- Point (c); Post-Yield 1 stageShortly (0.6 % in strain) after the yield point the fringes become symmetric. Here, the dark fringes in the u-pattern and v-pattern are approximately symmetric vertically and horizontally symmetric about the central horizontal line. Dark fringes are slightly curved.
- Point (d); Post-Yield 2 stageSimilar to the Post-Yield 1 stage, dark fringes in the u-pattern and v-pattern exhibit the symmetric feature. However, as compared with the Post-Yield 1 stage the dark fringes are much more curved. In addition, they are concentrated near the vertical center of the specimen (strain concentration).
- Point (e); Post-Yield 3 stageThe dark fringes in the u- and v-patterns lose the horizontal and vertical symmetry. Instead, they are somewhat symmetric around the slant, banded-region running from the lower left to the upper right, as seen in Figure 3, in which parallel, nearly linear dark fringes, are formed. Unlike the earlier stages, the u-pattern and v-pattern are similar to each other. The degree of strain concentration is similar to Point (d).
- Point (f); Post-Yield 4 stageThe slant symmetric feature of the fringe pattern is similar to Point (e). The similarity of the u- and v-patterns is clearer than Point (e). The degree of strain concentration is similar to Point (e).
- Point (g); Post-Yield 5 stageThe overall fringe pattern is similar to Point (e) while the degree of strain concentration is higher. The u- and v-patterns are nearly identical to each other.
4. Discussions
Basic Fringe Patterns
- (A)
- The -fringes are linear functions of , independent of . In Equation (38) this means . This is a case of uniform elastic deformation expressed in the coordinate system of the principal axes. The quiver plot indicates uniform stretch. In the language of the present field theory, the stretch is global.
- (B)
- The -fringes are linear functions of , independent of . In Equation (38) . The quiver plot indicates rigid-body rotation expressed in the coordinate system of the principal axes. The entire specimen undergoes the same rotation. In the language of the present field theory, the rotation is global.
- (C)
- The -fringes are linear functions of and . In Equation (38) . The quiver plot indicates a combination of uniform stretch and rigid-body rotation. The entire specimen undergoes the same rotation (the rotation is global).
- (D)
- The -fringes are quadratic functions of , independent of , with a negative coefficient for the second-order term. The parabolic fringe pattern bulges inward (called a “concave” parabolic pattern). The quiver plot indicates the following local rotations; the first and third quadrants undergo clockwise rotation and the second and fourth quadrants counterclockwise rotation.
- (E)
- The -fringes are quadratic functions of , independent of , with a positive coefficient for the second-order term. The parabolic fringe pattern bulges outward (called a “convex” parabolic pattern). The quiver plot indicates the following local rotations; the first and third quadrants undergo counterclockwise rotation and the second and fourth quadrants clockwise rotation.
- Case (1)
- This is a linear elastic deformation such as the one observed in Figure 3 point (a). Obeying the Poisson’s effect, the specimen exhibits inward horizontal displacement (towards the vertical center of the specimen) and upward vertical displacement in response to the vertical tensile load. The ratio of the horizontal normal strain to the vertical normal strain is equal to the Poisson’s ratio of the material. Non-zero volume expansion indicates that the specimen experiences stretch or compression. Constant volume expansion indicates that the stretch or compression is uniform.
- Case (2)
- This pattern is seen in the upper part of Figure 3 point (b). Zero volume expansion indicates that the specimen is not deformed. It follows that shear strain and hence the displacement field exhibits rigid-body rotation represented by . This pattern is commonly observed in the pre-fracture stage in tensile experiments where shear strain is concentrated in a small area above and below which the specimen undergoes rigid-body rotations [31].
- Case (3)
- This is a combination of Case (1) and Case (2). The u- and v-fringes are slant because both have and dependence. With the second order coefficient zero, the non-linear longitudinal elastic force is still zero. Shear strain and rotation are bodily (independent of the spatial coordinates). This indicates that the global horizontal and vertical coordinate axes ( and ) do not represent the principal axes. In the context of the tensile experiment, this pattern normally indicates that the specimen undergoes concentrated deformation outside the area of view (such as the shoulder of a dog-bone shape specimen) which induces misalignment between the tensile force exerted by the test machine and the vertical axis. The non-zero volume expansion indicates that the specimen undergoes deformation. The constant volume expansion indicates that the deformation is uniform in the area of view. Unlike Case (1), the shear strain is non-zero because it is expressed with non-principal axes.
- Case (4)
- The -fringes are parabolic and the -fringes are horizontally straight. This pattern is seen in point (c) in Figure 3. Shear strain and rotation are spatial coordinate-dependent, and the non-linear longitudinal elastic force only has a vertical ()-component.
- Case (5)
- Both the - and -fringes are parabolic where the -fringes are running vertically (independent of ) and the -fringes are horizontal (independent of ). This pattern is seen in point (d) in Figure 3. The shear strain and rotation are spatial-coordinate-dependent and the non-linear longitudinal elastic force has - and -components.
- Case (6)
- Linear fringes: If -fringes are vertical and -fringes are horizontal, the deformation is linear and elastic. The material exhibits normal strains only (when expressed with the principal axes). If -fringes are horizontal and -fringes are vertical or both fringes are slant, the deformation contains shear strain or rotation. In any case, the non-linear longitudinal elastic force is null.
- Parabolic fringes: When fringes are parabolic, the deformation contains shear strain and/or rotation, and the non-linear longitudinal elastic force is non-zero. The parabolic fringe pattern can be convex or concave, which represents local rotational displacement patters, as will be described below.
- Point (b); Yield pointFigure 5b indicates the nature of differential displacement of this stage. The u- and v-fringe patterns exhibit the concave type discussed in Figure 4d (The v-fringe pattern is represented by the left half of Figure 4d. The u-fringe pattern is represented by the left half of Figure 4d after rotated clockwise by 90 so that it represents .). The u-fringe pattern indicates that the region approximately a quarter from the bottom end of the specimen divides the differential displacement pattern such that the top three quarters exhibits counterclockwise rotation ( ) and the bottom quarter exhibits clockwise rotation ( ). The fringes away from this dividing regions are linear function of and , clearly satisfying the elastic criterion (18). The tilting behavior of the linear fringes indicates local bodily rotation. The -fringe pattern shows the same rotational behaviors. As the entire specimen, the rotational behavior that above the dividing region and below the dividing region indicates that the plastic deformation criterion (27) is satisfied. In other words, this pair of - and -fringe patterns literally exhibit the locally linear elastic and globally nonlinear plastic situation discussed above. The differential rotational behavior makes the dividing region undergo large rightward displacement as the arrow in Figure 5b indicates.
- Point (c); Post-Yield 1 stage
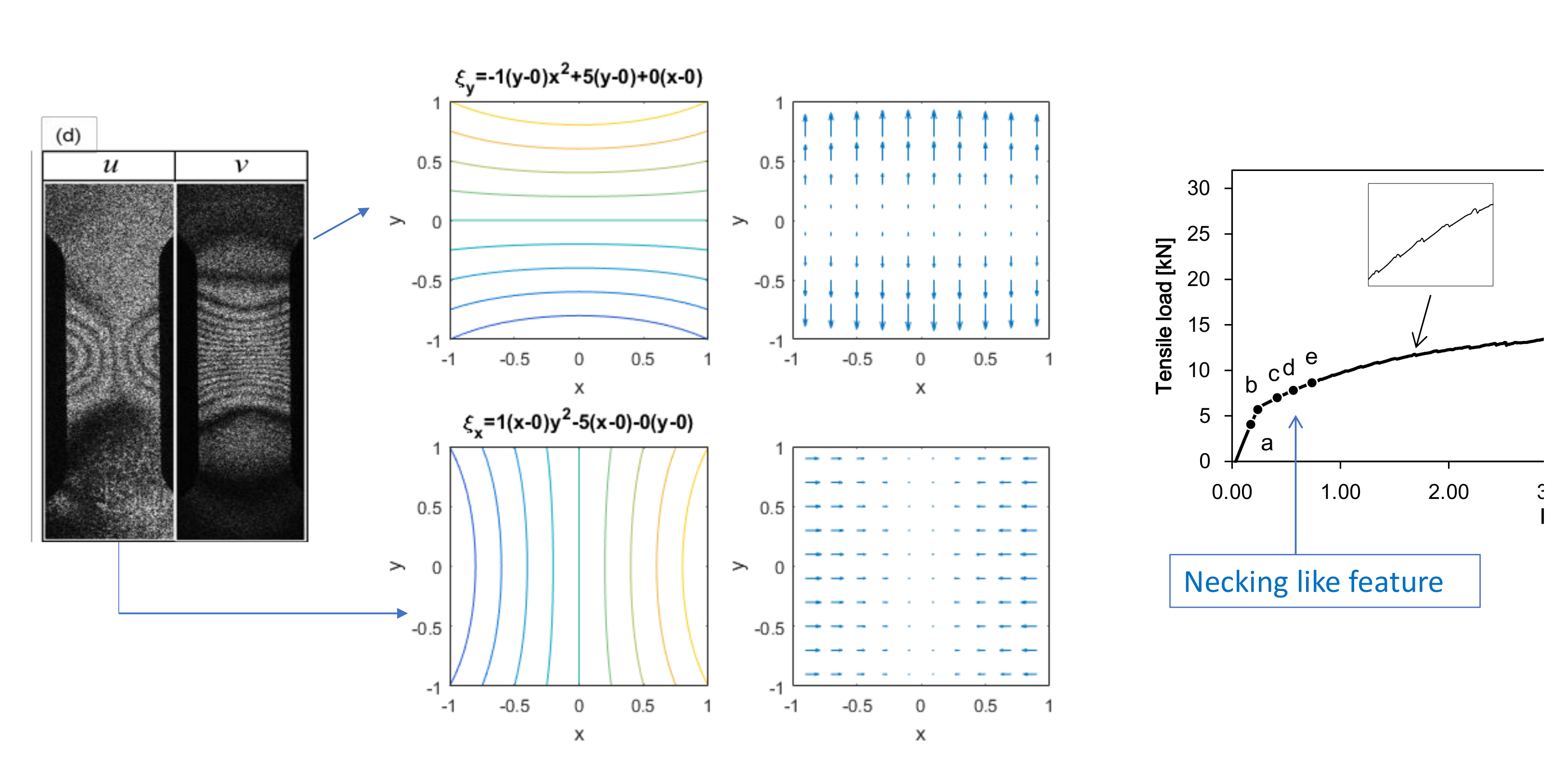
- Point (d); Post-Yield 2 stageThe concave feature in the - and -fringes is the same as stage (c) but the curvature is much greater and the fringes are much more concentrated towards the vertical center of the specimen. Around the center of the specimen, the top-right and bottom-left exhibit clockwise rotation () and the top-left and bottom-right exhibit counterclockwise rotation (). It is clear that the plastic criterion (27) is satisfied. Figure 6 illustrates the spatial pattern of the differential displacement components and explicitly. Notice that the behavior in the -field indicates that the so-called necking starts at this stage of deformation.
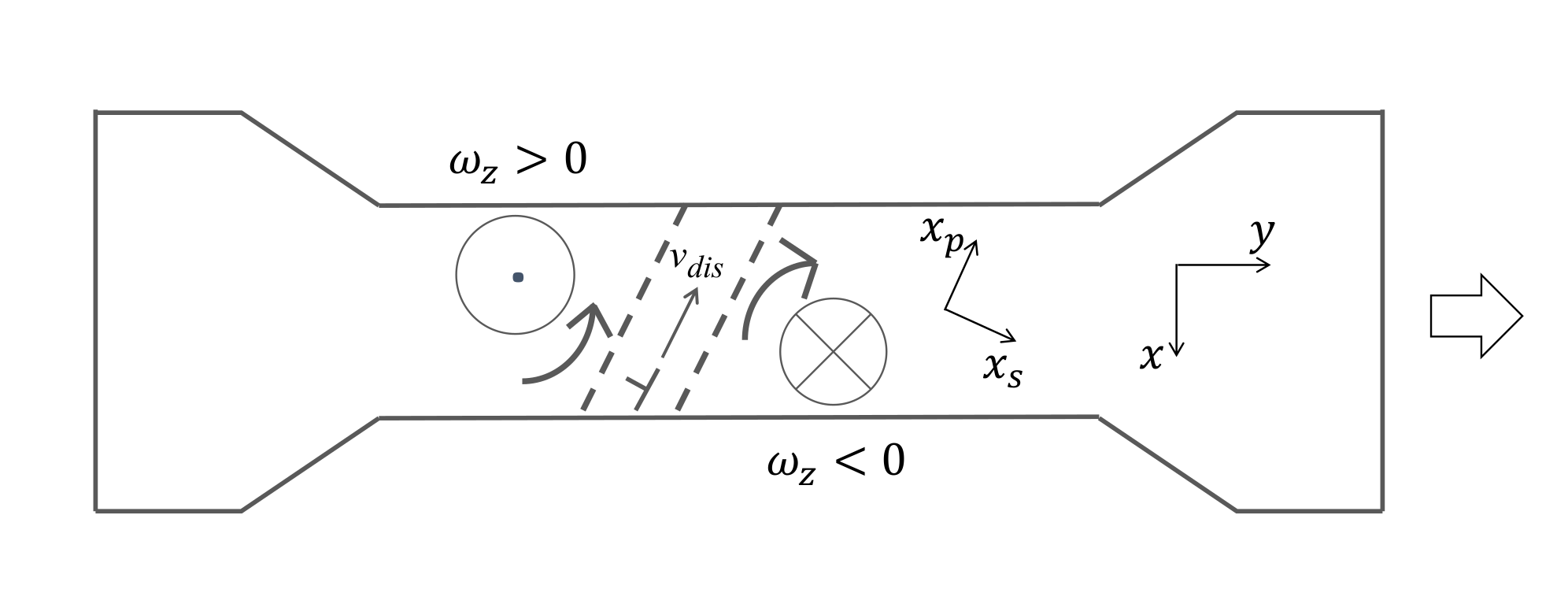
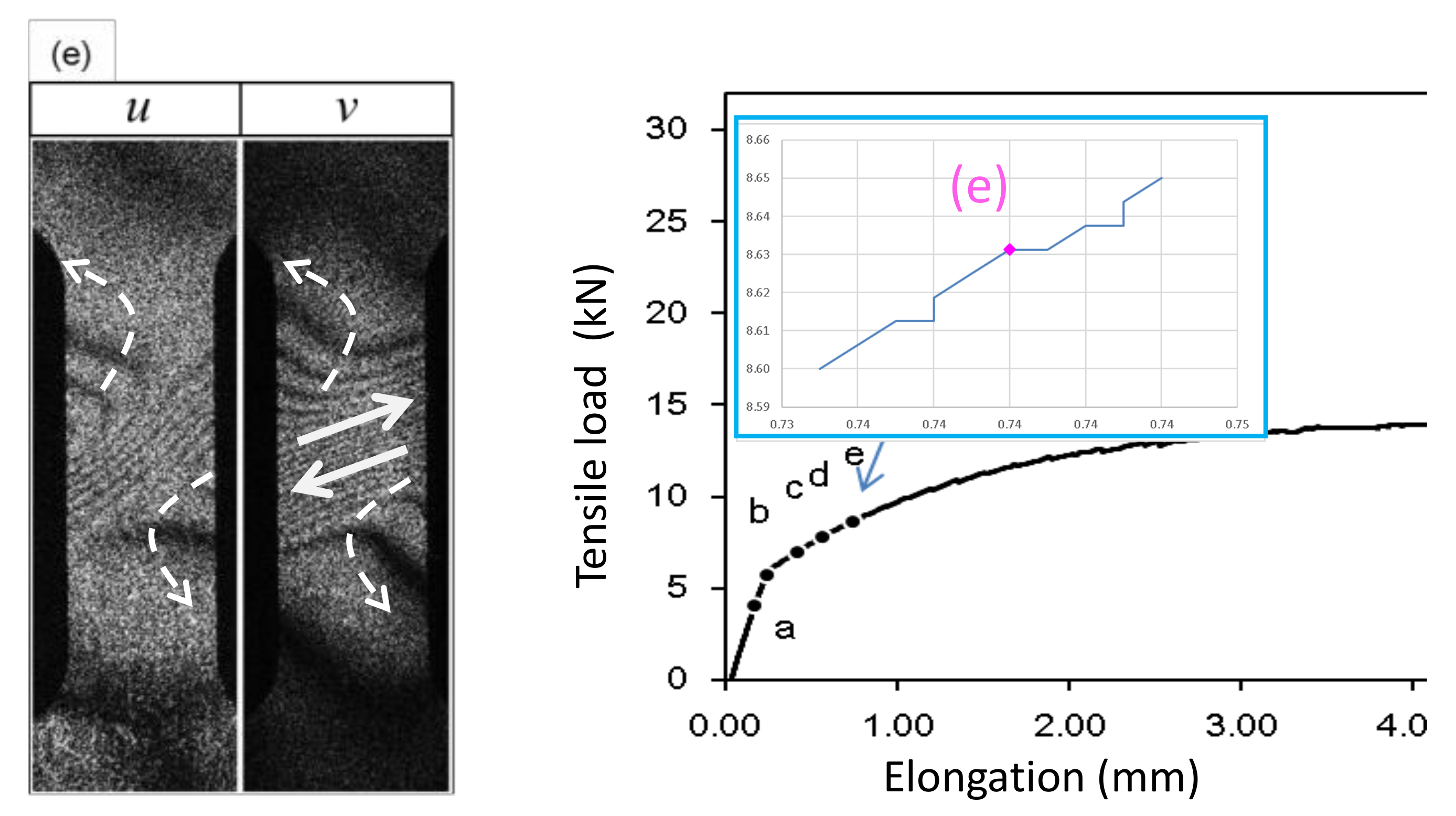
- Point (e); Post-Yield 3 stageThe - and -fringe patterns at this stage exhibit three distinctive regions. The middle region is characterized by approximately linear, slant dark fringes. The upper and lower regions are characterized by concave-curved fringes. Unlike the concave fringes observed at Point (d), however, the patterns are asymmetric. In the upper region, the curvature is much greater on the left half than the right half. Conversely, in the lower region, the right half exhibits a much greater curvature than the left half. Based on the argument made for Point (d) (see Figure 5d), we can say that the top left and bottom right regions undergo counterclockwise rotations (). As indicated in Figure 7 these rotations induce shear stress on the right and left sides of the specimen. The linear slant fringes in the middle region leads to the condition (because the linearity indicates a spatially independent ), and hence satisfies partial fracture condition (35). Indeed, the closed-up loading curve inserted in Figure 7 indicates that immediately after point (e) the stress stops rising. It is likely that the shear stress causes the partial fracture condition.This establishment of partial fracture condition in conjunction with the temporal behavior of the stress can be explained from the viewpoint of dislocation theory. The shear stress induced by the rotation pair pushes dislocations toward a side of the specimen along the boundary of the rotations. The material exerts resistive force to the dislocations by various mechanisms, such as dislocation pinning by impurities [34]. This force causes the stress rise as observed in the loading curve. Overcoming the resistive force, the dislocations keep propagating. Once the propagation reaches a side of the specimen, the exertion of resistive force ceases. Consequently, the stress drops. At the same time, the upper and lower part recoil induces rotations respectively. Since the angular momentum must be conserved (because there is no external torque), the rotations are opposite in direction. The same process repeats at the boundary of another pair of rotations where high shear stress is generated.This type of repetitive stress rise and drop is known as the serration. A number of previous studies [27,28,29,30] revealed clear correlations between serration and rotation-like fringe patterns. When a uniform stretch is hindered at a point where the dislocation is pinned, the stretch over the unpinned portions causes rotation because the deformation is hinged at the point of pinning. Previous studies [10,27] indicate that the slant, linear fringe patterns observed in association with the rotational behavior of deformation move at a velocity similar to the rotational wave. This makes sense because, as mentioned above, the formation of shear stress is caused by the rotational mode displacement. It is likely that the high shear stress is developed at the location where the rotational wave has a peak. It is interesting to note that pure aluminum specimens normally do not show a clear serration behavior and the post-yield parabolic fringe patterns are usually not slant. This can be explained as follows. When the material is free of impurity, the dislocations are not pinned and, therefore, the material undergoes deformation without the type of rotations that exhibit slant, non-linear fringes. The formation of the shear stress along with the associated stress drop and the explanation based on dislocation theory is a subject of our future study.
- Point (f); Post-Yield 4 stageThis point is characterized as the maximum stress point on the loading curve Figure 3A. The similarity in the overall fringe pattern to Point (e) indicates that the developed shear deformation along the boundary of the counterclockwise rotation pair is still active. The fact that the stress starts to decrease from this point on indicates reduction in the elastic modulus. The propagation of dislocations associated with the serration is responsible for the reduction in the elastic modulus. The enhancement in the similarity between the u- and v-fringe patterns indicates that this is the onset of the transition to the final fracture (see the discussion for Point (g) in the next paragraph).
- Point (g); Post-Yield 5 stageThe higher degree in the strain concentration as compared with Point (g) indicates that a developed, localized charge is being formed. The similarity between the u- and v-fringes leads to an interesting argument. Previous experiments [12,27] commonly indicate that at the fracture the u- and v-fringe patterns are identical in shape where the dark fringes are linear. The linearity of the dark fringes in this context makes total sense as linear differential displacement makes and this condition constitutes the fracture criterion (36). Thus, the following argument can be made. Assume that the horizontal and vertical differential displacements are expressed by the same function asSubstitution of Equation (44) into Equations (39) and (41) leads to the following equality.Equations (45) and (46) indicate . Remembering that the plastic deformation charge is the temporal derivative of we can argue that in the fracturing stage the charge is characterized as shear. This view is consistent with the view by Panin [35] that the plastic deformation is shear instability and the fracture is the final stage of plastic deformation. In addition, and are the and components of the differential displacement vector . The fact that the and components are equal to each other means that the vector is oriented 45 to the tensile direction (-axis). This is the direction of the maximum shear stress and it is widely known that fracture occurs in the direction of the maximum shear stress.
5. Concluding Remarks
- If the dark fringes observed in the differential displacement component parallel to the tensile axis are equidistant, linear parallel running perpendicularly to the tensile force, the deformation is linear and elastic. Under this condition, the dark fringes of the differential displacement component perpendicular to the tensile axis are equidistant, linear, and running parallel to the tensile force. The numbers of fringes observed in the two components are determined by the Poisson’s ratio of the material. The shear strain and rotation are zero when expressed in the principal coordinate system.
- If the dark fringes are slanted to the tensile axis, it indicates that and/or meaning that the deformation is plastic. It is likely that dark fringes are curved indicating that the plastic deformation criterion is established, . It is possible that curved fringes are not in the view of the fringe image. In that case, dark fringes appear to be slant and linear.
- As the deformation further develops, the dark fringes tend to be concentrated at a certain location of the specimen. It is possible that the concentrated dark fringes are approximately linear, running at a slanted angle to the tensile axis and that above and below these slanted regions, the fringes are curved. In that case, if the upper and lower curved fringes represent of the same sign, it means that the material experiences concentrated shear strain in the slanted region. It is likely that the partial fracture criterion is satisfied and that the stress is about to drop.
- In the late stage of plastic deformation, when the loading curve has passed the maximum stress, the fringe patterns observed in the perpendicular and parallel components of the differential displacement start to become similar to each other. This is an indication that the deformation enters the final stage toward the total fracture. The fringe patterns in the perpendicular and parallel components of the differential displacement become identical on the final fracture.
Author Contributions
Funding
Conflicts of Interest
References
- Cotter, D.J.; Michaels, J.E.; Zhang, Z.; Ghabour, E.; Nelligan, T.; Abbate, A.; Kass, D.; Elfbaum, G. High Frequency Ultrasonic Thickness and Acoustic Velocity Measurement Methods for Advanced Material and Component Characterization. J. Nondestruct. Test. 2002, 7, 12. [Google Scholar]
- Ross, G.; Vuorinen, V.; Petzold, M.; Paulasto-Kröckel, M.; Brand, S. Gigahertz scanning acoustic microscopy analysis of voids in Cu-Sn micro-connects. Appl. Phys. Lett. 2017, 110, 054102. [Google Scholar] [CrossRef] [Green Version]
- Dehoux, T.; Abi Ghanem, M.; Zouani, O.F.; Rampnoux, J.-M.; Guillet, Y.; Dilhaire, S.; Durrieu, M.-C.; Audoina, B. All-optical broadband ultrasonography of single cells. Sci. Rep. 2015, 5, 8650. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoshida, S. Deformation and Fracture of Solid-State Materials—Field Theoretical Approach and Engineering Applications; Springer: New York, NY, USA, 2015. [Google Scholar]
- Yoshida, S. Comprehensive Description of Deformation of Solids as Wave Dynamics. Math. Mech. Complex Syst. 2015, 3, 243–272. [Google Scholar] [CrossRef]
- Elliott, J.P.; Dawber, P.G. Symmetry in Physics; Macmillan: London, UK, 1984; Volume 1. [Google Scholar]
- Graff, K.F. Wave Motion in Elastic Solids; Oxford University Press: London, UK, 1975. [Google Scholar]
- Panin, V.E. Wave nature of plastic deformation. J. Sov. Phys. 1990, 33, 99–110. [Google Scholar] [CrossRef]
- Danilov, V.I.; Zuyev, L.B.; Mnikh, N.M.; Panin, V.Y.; Shershova, L.V. Wave effects during plastic flow of polycrystalline Al. Phys. Met. Metall. 1991, 71, 187–193. [Google Scholar]
- Yoshida, S.; Siahaan, B.; Pardede, M.H.; Sijabat, N.; Simangunsong, H.; Simbolon, T.; Kusnowo, A. Observation of plastic deformation wave in a tensile-loaded aluminum-alloy. Phys. Lett. A 1999, 251, 54–60. [Google Scholar] [CrossRef] [Green Version]
- Yoshida, S. Wave nature in deformation of solids and comprehensive description of deformation dynamics. Proc. Est. Acad. Sci. 2015, 64, 438–448. [Google Scholar] [CrossRef]
- Yoshida, S.; Rourks, R.L.; Mita, T.; Ichinose, K. Physical mesomechanical Criteria of plastic deformation and fracture. Phys. Mesomech. 2009, 12, 249–253. [Google Scholar] [CrossRef] [Green Version]
- Yoshida, S.; Muhamad, I.; Pardede, M.; Widiastuti, R.; Siahaan, M.B.; Kusnowo, A. Optical interferometry applied to analyze deformation and fracture of aluminum alloys. Theor. Appl. Fracture Mech. 1997, 27, 85–98. [Google Scholar] [CrossRef]
- Yoshida, S. Optical interferometric study on deformation and fracture based on physical mesomechanics. J. Phys. Mesomech. Mech. 1999, 2, 5–12, (In English and Russian). [Google Scholar]
- Yoshida, S. Interpretation of mesomechanical behaviors of plastic deformation based on analogy to Maxwell electromagnetic theory. J. Phys. Mesomech. Mech. 2001, 4, 29–34. [Google Scholar]
- Sasaki, T.; Yoshida, S. Revealing load hysteresis based on electronic speckle pattern interferometry and physical mesomechanics. Phys. Mesomech. 2012, 15, 47–57. [Google Scholar] [CrossRef]
- Leendertz, J.A. Interferometric displacement measurement on scattering surfaces utilizing speckle effect. J. Phys. E 1970, 3, 214–218. [Google Scholar] [CrossRef]
- Sciammarella, C.A.; Sciammarella, F.M. Experimental Mechanics of Solids; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Creath, K. Phase-shifting speckle interferometry. Appl. Opt. 1985, 24, 3053–3058. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Xie, X.; Zhu, L.; Wu, S. Review of electronic speckle pattern interferometry (ESPI) for three dimensional displacement measurement. Chin. J. Mech. Eng. 2014, 27, 1–13. [Google Scholar] [CrossRef]
- Zhang, W.; Wei, H.; Yang, H.; Wu, X.; Li, Y. Comb-referenced frequency-sweeping interferometry for precisely measuring large stepped structures. Appl. Opt. 2018, 57, 1247–1253. [Google Scholar] [CrossRef] [PubMed]
- Yamagiwa, M.; Minamikawa, T.; Trovato, C.; Ogawa, T.; Ghareab, D.; Ibrahim, A.; Kawahito, Y.; Oe, R.; Shibuya, K.; Mizuno, T.; et al. Multicascade-linked synthetic wavelength digital holography using an optical-comb-referenced frequency synthesizer. Opt. Exp. 2018, 26, 26292–26306. [Google Scholar] [CrossRef] [PubMed]
- Frampton, P.H. Gauge invariance. In Gauge Field Theories; The Benjamin/Cummings Publishing Company: Menlo Park, CA, USA, 1987; Chapter 1. [Google Scholar]
- Aitchson, I.J.R.; Hey, A.J.G. Gauge Theories in Particle Physics; IOP Publishing: Bristol, UK; Philadelphia, PA, USA, 1989. [Google Scholar]
- Yoshida, S. Deformation and Fracture of Solid-State Materials—Field Theoretical Approach and Engineering Applications; Springer: New York, NY, USA, 2015; p. 92. [Google Scholar]
- Yoshida, S. Deformation and Fracture of Solid-State Materials—Field Theoretical Approach and Engineering Applications; Springer: New York, NY, USA, 2015; p. 105. [Google Scholar]
- Yoshida, S.; Widiastuti, S.R.; Pardede, M.; Hutagalung, S.; Marpaung, J.S.; Muhardy, A.F.; Kusnowo, A. Direct observation of developed plastic deformation and its application to nondestructive testing. Jpn. J. Appl. Phys. 1996, 35, L854–L857. [Google Scholar] [CrossRef]
- Muchiar, S.Y.; Muhamad, I.; Widiastuti, R.; Kusnowo, A. Optical interferometric technique for deformation analysis. Opt. Exp. 1998, 2, 516–530. [Google Scholar]
- Nakamura, T.; Sasaki, T.; Yoshida, S. Analysis of Portevin-Le Chatelier Effect of Al-Mg Alloy by Electronic Speckle Pattern Interferometry. In Advancement of Optical Methods in Experimental Mechanics; Jin, H., Sciammarella, C., Yoshida, S., Lamberti, L., Eds.; Conference Proceedings of the Society for Experimental Mechanics Series; Springer: Cham, Switzerland, 2014; Volume 3, pp. 109–117. [Google Scholar]
- Sasaki, T.; Nakamura, T.; Yoshida, S. Observation of Grain-Size Effect in Serration of Aluminum Alloy. In Advancement of Optical Methods in Experimental Mechanics; Jin, H., Sciammarella, C., Yoshida, S., Lamberti, L., Eds.; Experimental Mechanics Series; Springer: Cham, Switzerland, 2015; Volume 3, pp. 109–115. [Google Scholar]
- Yoshida, S.; Sasaki, T. Field Theoretical Description of Shear Bands. In Fracture, Fatigue, Failure and Damage Evolution; Springer: Cham, Switzerland, 2016; Chapter 18; Volume 8, pp. 141–149. [Google Scholar]
- Yoshida, S. Deformation and Fracture of Solid-State Materials—Field Theoretical Approach and Engineering Applications; Springer: New York, NY, USA, 2015; p. 104. [Google Scholar]
- Sasaki, T.; Suzuki, H.; Yoshida, S. Evaluation of Dynamic Deformation Behavior of Aluminum Alloy by Electronic Speckle Pattern Interferometry. In Imaging Methods for Novel Materials and Challenging Applications; Jin, H., Sciammarella, C., Furlong, C., Yoshida, S., Eds.; Conference Proceedings of the Society for Experimental Mechanics Series; Springer: New York, NY, USA, 2013; Volume 3, pp. 133–139. [Google Scholar]
- Patinet, S.; Proville, L. Dislocations pinning by substitutional impurities in an atomic-scale model for the Al(Mg) solid solutions. In Philosophical Magazine; Taylor & Francis: Abingdon, UK, 2011; p. 1. [Google Scholar] [CrossRef] [Green Version]
- Panin, V.E.; (Russian Academy of Sciences, Tomsk, Russia). Personal Communication, 1989.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | u-Fringes | v-Fringes | Coefficients | Remarks |
|---|---|---|---|---|
| (1) | L/V | L/H | , | Observed in Figure 3 point (a) |
| (2) | L/H | L/V | , | -fringes shown in Figure 4b |
| (3) | L/S | L/S | , | Observed in Figure 3 point (b) |
| (4) | nL/V | L/H | , | Observed in Figure 3 point (c) |
| (5) | nL/V | nL/H | , | Observed in Figure 3 point (d) |
| (6) | nL/S | nL/S | Observed in Figure 3 point (e) |
| Case | |||
|---|---|---|---|
| (1) | 0 | 0 | |
| (2) | 0 | ||
| (3) | |||
| (4) | |||
| (5) | |||
| (6) |
| Case | Deformation Stage Criteria | ||
|---|---|---|---|
| (1) | 0 | 0 | uniform elastic deformation (principal axes) |
| (2) | 0 | 0 | rigid-body rotation |
| (3) | 0 | 0 | uniform elastic deformation (non-principal axes) |
| (4) | plastic deformation | ||
| (5) | plastic deformation | ||
| (6) | plastic deformation |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoshida, S.; Sasaki, T. Deformation Wave Theory and Application to Optical Interferometry. Materials 2020, 13, 1363. https://doi.org/10.3390/ma13061363
Yoshida S, Sasaki T. Deformation Wave Theory and Application to Optical Interferometry. Materials. 2020; 13(6):1363. https://doi.org/10.3390/ma13061363
Chicago/Turabian StyleYoshida, Sanichiro, and Tomohiro Sasaki. 2020. "Deformation Wave Theory and Application to Optical Interferometry" Materials 13, no. 6: 1363. https://doi.org/10.3390/ma13061363
APA StyleYoshida, S., & Sasaki, T. (2020). Deformation Wave Theory and Application to Optical Interferometry. Materials, 13(6), 1363. https://doi.org/10.3390/ma13061363