
Optimization of Steel Roof Framing Taking into Account the Random Nature of Design Parameters


Abstract
:1. Introduction
2. Materials and Methods
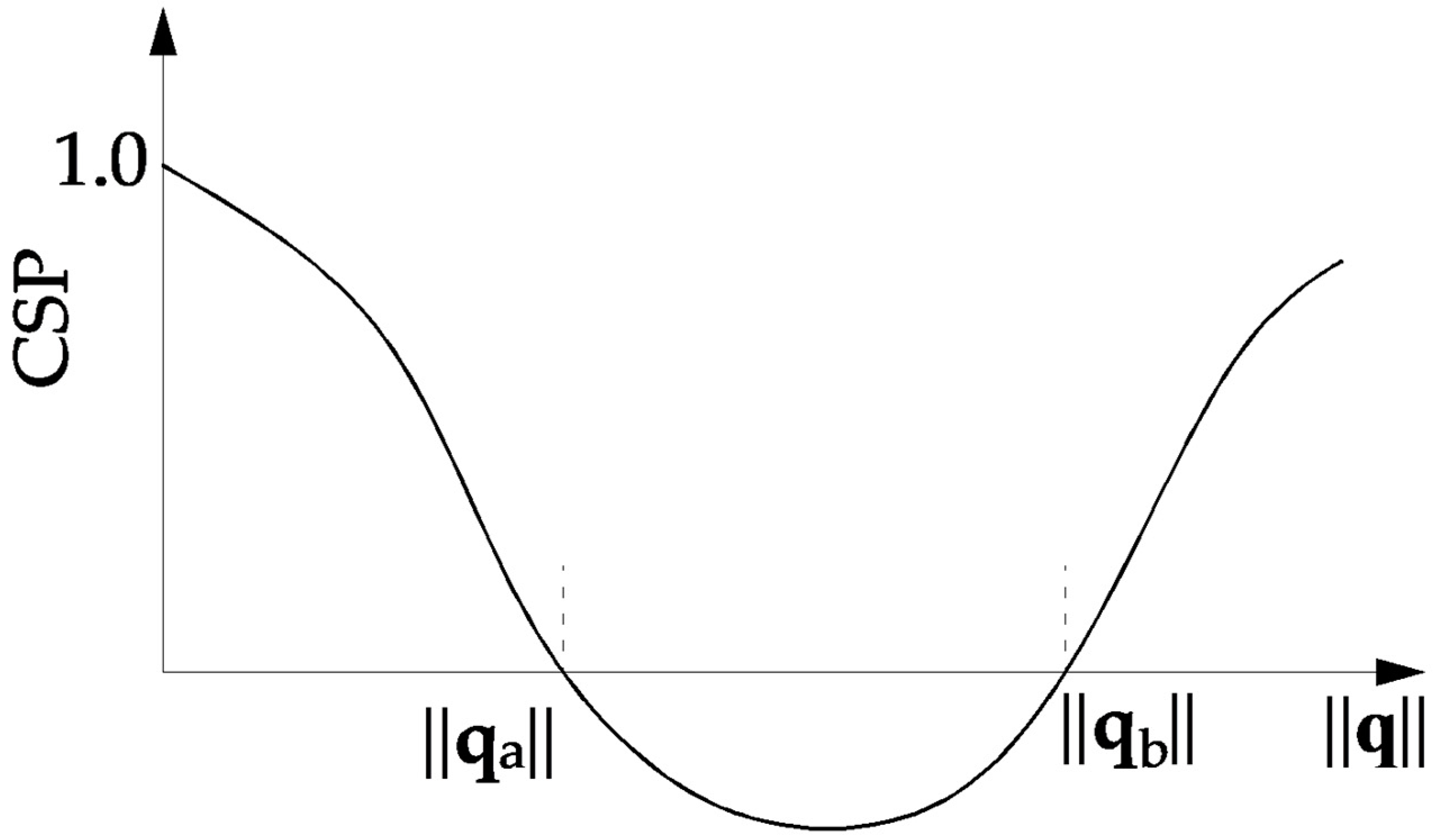
2.1. Geometrically Nonlinear Static-Strength Analysis
- -
- estimation of the system stiffness by a changing value,
- -
- estimation of stability of the investigated segment of an equilibrium path by checking the changing sign,
- -
- selection of effective step length,
- -
- control near limit points.
2.2. First-Order Reliability Method
2.3. Robust Optimization
- Specify the feasible region according to congruent with (7) and (8) and select the weighting factor γ.
- Generate N realizations of the vector of design variables uniformly spaced over the current feasible region, in accordance with the optimal Latin-hypercube design.
- Determine statistical moments of the objective and constraint functions for each of the N realizations of vector {, µx}.
- Construct the response surface using methods, such as kriging, directly for individual statistical moments: .
- Solve the deterministic optimization problemSubject to constraints:
- Check the condition for convergence; if it is satisfied, terminate the algorithm.
- Shift the feasible region over the optimal point determined at step 5. Reduce the feasible region and return.
A Latin hypercube L1is considered better than L2if d(L1) > d(L2), whereas when d(L1) = d(L2), L1 is better than L2if nd(L1) < nd(L2). For the force criterion, L1is said to be better than L2if G(L1) < G(L2).
3. Results
3.1. Reliability Analysis
3.2. Deterministic Optimisation
3.3. Robust Optimisation
4. Discussion
5. Conclusions
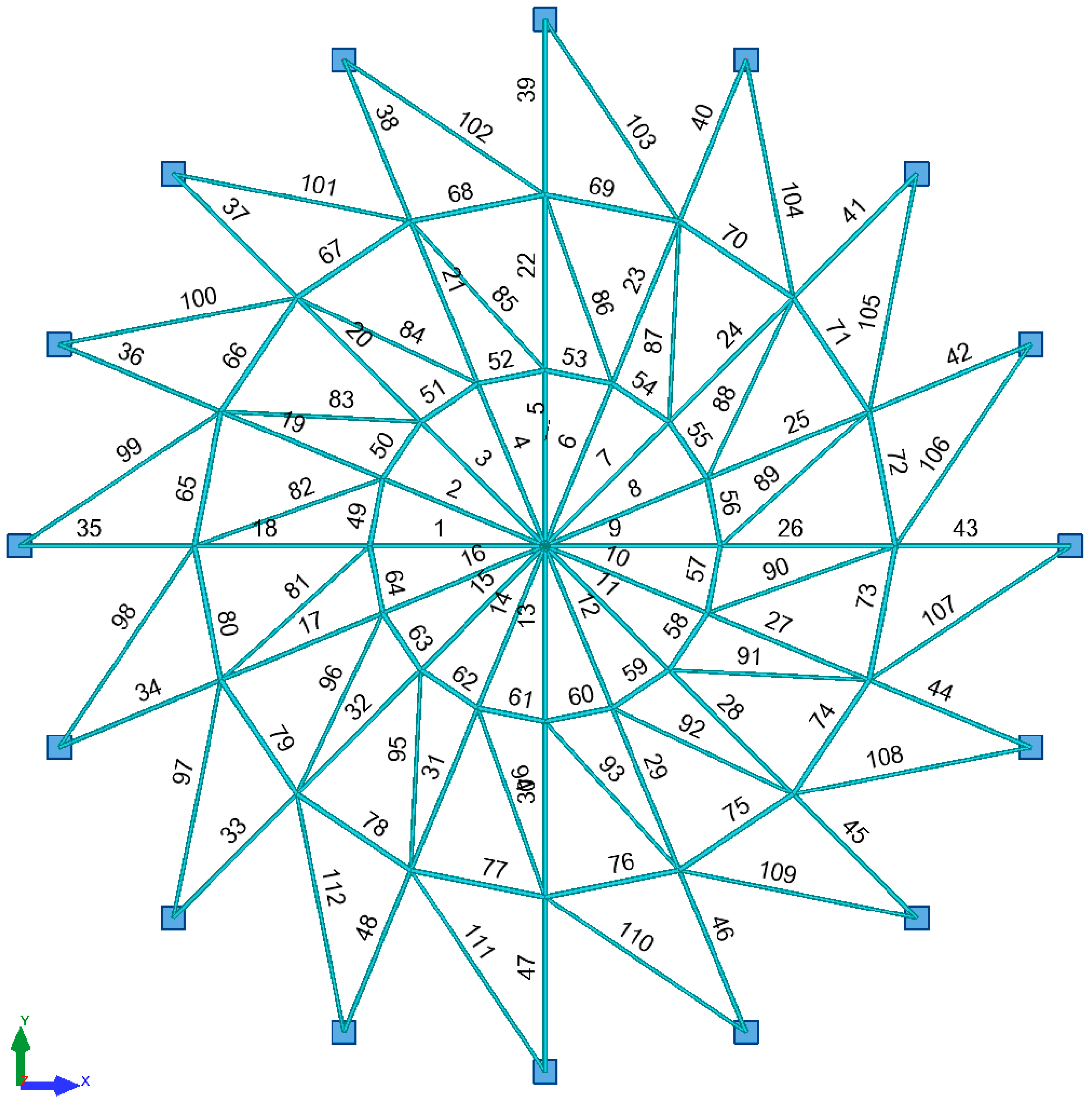
- Shallow steel roof framing characterizes strong nonlinear effects. Therefore, calculations should be based on a geometrically nonlinear analysis. The buckling of individual members does not always lead to the loss of stability of the structure. The phenomenon of the snap-through is often the decisive form of loss of stability.
- Optimal designs are usually particularly sensitive to parameter imperfections. Optimal solutions located on the border of the acceptable area may, due to imperfection, enter the hazardous area relatively easily, and thus turn out to be completely useless if the parameter values differ even slightly from the assumed nominal values.
- An indispensable element of structure design should be the support of deterministic optimization with robust optimization. As a result of robust optimization, we obtain a structure that is less optimal (with a negligibly greater mass), but definitely safer, as evidenced by the values of reliability indexes. Taking into account the uncertainty of the design parameters in the formulation of the robust optimization unequivocally solves this problem, giving the designer control over the safety level of the structure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
List of Standards
| N1. EN 1993-1-1. Eurocode 3: Design of steel structures–Part 1–1: General rules and rules for buildings. |
| N2. EN 1991-1-3. Eurocode 1: Actions on structures–Part 1–3: General actions–Snow loads. |
| N3. EN 1991-1-4. Eurocode 1: Actions on structures–Part 1–4: General actions–Wind actions. |
| N4. EN 1990: 2002. Eurocode–Basis for structural design. |
References
- Tomei, V.; Grande, E.; Imbimbo, M. Design optimization of gridshells equipped with pre-tensioned rods. J. Build. Eng. 2022, 52, 104407. [Google Scholar] [CrossRef]
- Rackwitz, R.; Fiessler, B. Structural reliability under combined random load sequences. Comput. Struct. 1978, 9, 489–494. [Google Scholar] [CrossRef]
- Mochocki, W.; Radoń, U. Analysis of Basic Failure Scenarios of a Truss Tower in a Probabilistic Approach. Appl. Sci. 2019, 9, 2662. [Google Scholar] [CrossRef] [Green Version]
- Kubicka, K.; Obara, P.; Radon, U.; Szaniec, W. Assessment of steel truss fire safety in terms of the system reliability analysis. Arch. Civ. Mech. Eng. 2019, 19, 417–427. [Google Scholar] [CrossRef]
- Zabojszcza, P.; Radoń, U.; Szaniec, W. Probabilistic Approach to Limit States of a Steel Dome. Materials 2021, 14, 5528. [Google Scholar] [CrossRef]
- Zabojszcza, P.; Radoń, U. The Impact of Node Location Imperfections on the Reliability of Single-Layer Steel Domes. Appl. Sci. 2019, 9, 2742. [Google Scholar] [CrossRef] [Green Version]
- Hohenbichler, M.; Gollwitzer, S.; Kruse, W.; Rackwitz, R. New light on first- and second-order reliability methods. Struct. Saf. 1987, 4, 267–284. [Google Scholar] [CrossRef]
- Der Kiureghian, A.; De Stefano, M. Efficient Algorithm for Second-Order Reliability Analysis. J. Eng. Mech. 1991, 117, 2904–2923. [Google Scholar] [CrossRef]
- Dudzik, A. Reliability Assessment of Steel-Aluminium Lattice Tower. IOP Conf. Ser. Mater. Sci. Eng. 2017, 245, 032072. [Google Scholar] [CrossRef] [Green Version]
- Rossi, L.; Winands, M.H.M.; Butenweg, C. Monte Carlo Tree Search as an intelligent search tool in structural design problems. Eng. Comput. 2021, 1–18. [Google Scholar] [CrossRef]
- Zabojszcza, P.; Radoń, U. Stability analysis of the single-layer dome in probabilistic description by the Monte Carlo method. J. Theor. Appl. Mech. 2020, 58, 425–436. [Google Scholar] [CrossRef]
- Potrzeszcz-Sut, B. Reliability Analysis of Shell Truss Structure by Hybrid Monte Carlo Method. J. Theor. Appl. Mech. 2020, 58, 469–482. [Google Scholar] [CrossRef]
- Dudzik, A.; Potrzeszcz-Sut, B. Hybrid Approach to the First Order Reliability Method in the Reliability Analysis of a Spatial Structure. Appl. Sci. 2021, 11, 648. [Google Scholar] [CrossRef]
- Fujita, M.; Rackwitz, R. Updating first-and second-order reliability estimates by importance sampling. Doboku Gakkai Ronbunshu 1988, 1988, 53–59. [Google Scholar] [CrossRef]
- Kubicka, K.; Pawlak, U.; Radoń, U. Influence of the Thermal Insulation Type and Thickness on the Structure Mechanical Response Under Fire Conditions. Appl. Sci. 2019, 9, 2606. [Google Scholar] [CrossRef] [Green Version]
- Kubicka, K.; Radoń, U.; Szaniec, W.; Pawlak, U. Comparative analysis of the reliability of steel structure with pinned and rigidnodes subjected to fire. IOP Conf. Ser. Mater. Sci. Eng. 2017, 245, 022051. [Google Scholar] [CrossRef]
- Kubicka, K.; Radoń, U. The impact of support type on the reliability of steel trusses subjected to the action of a fire. Appl. Sci. 2020, 10, 7916. [Google Scholar] [CrossRef]
- Kubicka, K.; Radoń, U. Influence of randomness of buckling coefficient on the reliability index’s value under fire conditions. Arch. Civ. Eng. 2018, 64, 173–179. [Google Scholar] [CrossRef] [Green Version]
- Kuschel, N.; Rackwitz, R. Optimal design under time-variant reliability constraints. Struct. Saf. 2000, 22, 113–128. [Google Scholar] [CrossRef]
- Hurtado, J.E. Reliability Problems in Earthquake Engineering; Monograph CIMNE IS-63; Centre Internacional de Mètodes Numèrics en Enginyeria (CIMNE): Barcelona, Spain, 2010; ISBN 978-84-96736-86-3. [Google Scholar]
- Baltzopoulos, G.; Grella, A.; Iervolino, I. Seismic reliability implied by behavior-factor-based design. Earthq. Eng. Struct. Dyn. 2021, 50, 4076–4096. [Google Scholar] [CrossRef]
- Vahid, J.; Yazdani, M. Seismic reliability and limit state risk evaluation of plain concrete arch bridges. Struct. Infrastruct. Eng. 2021, 17, 170–190. [Google Scholar] [CrossRef]
- Streicher, H.; Rackwitz, R. Time-variant reliability-oriented structural optimization and a renewal model for life-cycle costing. Probabilistic Eng. Mech. 2004, 19, 171–183. [Google Scholar] [CrossRef]
- Streicher, H.; Rackwitz, R. Structural optimization—A one level approach. In AMAS Workshop on Reliability-Based Design and Optimization-RBO’02; Jendo, W.S., Doliński, K., Kleiber, M., Eds.; IPPT: Warsaw, Poland, 2002. [Google Scholar]
- Kuschel, N.; Rackwitz, R. Two basic problems in reliability-based structural optimization. Math. Methods Oper. Res. 1997, 46, 309–333. [Google Scholar] [CrossRef]
- Chróścielewski, J.; Burzyński, S.; Daszkiewicz, K.; Sobczyk, B.; Witkowski, W. Wprowadzenie do modelowania MES w programie ABAQUS. In Introduction to FEM Modeling in Abaqus Software; Politechnika Gdańska: Gdańsk, Poland, 2014; ISBN 978-83-7348-557-0. (In Polish) [Google Scholar]
- Knabel, J.; Kolanek, K.; Nguyen Hoang, V.; Stocki, R.; Tauzowski, P. Structural reliability analysis using object oriented environment STAND. In Proceedings of the 36th Solid Mechanics Conference, Gdansk, Poland, 9–12 September 2008. [Google Scholar]
- Kowalczyk, P.; Rojek, J.; Stocki, R.; Bednarek, T.; Tauzowski, P.; Lasota, R.; Lumelskyy, D.; Wawrzyk, K. NUMPRESS—Integrated computer system for analysis and optimization of industrial sheet metal forming processes. HUTNIK–WIADOMOSCI HUTNICZE 2014, 81, 56–63. [Google Scholar]
- Bergan, P.G. Solution techniques for nonlinear finite element problems. Int. J. Numer. Methods Eng. 1978, 12, 1677–1696. [Google Scholar] [CrossRef]
- Bergan, P.G.; Soreide, T.H. Solution of large displacement and stability using the current stiffness parameter. In Finite Elements in Nonlinear Mechanics: Papers Presented at the International Conference on Finite Elements in Nonlinear Solid and Structural Mechanics, Held at Geilo, Norway, August 1977; Tapir, Norwegian Institute of Technology: Trondheim, Norway, 1977; pp. 647–669. [Google Scholar]
- Riks, E. The application of Newton’s method to the problem of elastic stability. J. Appl. Mech. 1972, 39, 1060–1065. [Google Scholar] [CrossRef]
- Riks, E. An incremental approach to the solution of snapping and buckling problems. Int. J. Solids Struct. 1979, 15, 529–551. [Google Scholar] [CrossRef]
- Youn, B.D.; Choi, K.K. A new response surface methodology for reliability-based design optimization. Comput. Struct. 2004, 82, 241–256. [Google Scholar] [CrossRef]
- Doltsinis, I.; Kang, Z. Robust design of non-linear structures using optimization methods. Comput. Methods Appl. Mech. Eng. 2005, 194, 1179–1795. [Google Scholar] [CrossRef]
- Chen, W.; Fu, W.; Biggers, S.B.; Latour, R.A. An affordable approach for robust design of thick laminated composite structure. Optim. Eng. 2000, 1, 305–322. [Google Scholar] [CrossRef]
- Zabojszcza, P.; Radoń, U.; Tauzowski, P. Robust optimization of a single-layer lattice dome. In Modern Trends in Research on Steel, Aluminium and Composite Structures, Proceedings of the XIV International Conference on Metal Structures (ICMS2021), Poznań, Poland, 16–18 June 2021; Routledge: London, UK, 2021; p. 456. [Google Scholar] [CrossRef]
- Richardson, J.N.; Coelho, R.F.; Adriaessens, S. Robust topology optimization of truss structures with random loading and material properties: A multiobjective perspective. Comput. Struct. 2015, 154, 41–47. [Google Scholar] [CrossRef]
- Li, Y.Q.; Cui, Z.S.; Ruan, X.Y.; Zhang, D.J. CAE-based six sigma robust optimization for deep-drawing sheet metal process. Int. J. Adv. Manuf. Technol. 2006, 30, 631–637. [Google Scholar] [CrossRef]
- Tang, L.C.; Xu, K. A unified approach for dual response surface optimization. J. Qual. Technol. 2002, 34, 437–447. [Google Scholar] [CrossRef]
- Vining, G.G.; Myers, R.H. Combining Taguchi and response surface philosophies: A dual response approach. J. Qual. Technol. 1990, 22, 38–45. [Google Scholar] [CrossRef]
- Yeniay, O.; Unal, R.; Lepsch, A.R. Using dual response surfaces to reduce variability in launch vehicle design: A case study. Reliab. Eng. Syst. Saf. 2006, 91, 407–412. [Google Scholar] [CrossRef]
- Simpson, T.W.; Mauery, T.M.; Korte, J.J.; Mistree, F. Kriging metamodels for global approximation in simulation-based multidisciplinary design optimization. AIAA J. 2001, 39, 2233–2241. [Google Scholar] [CrossRef] [Green Version]
- Simpson, T.W. A Concept Exploration Method for Product Family Design. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 1998. [Google Scholar]
- Gano, S.E.; Renaud, J.E.; Martin, J.D.; Simpson, T.W. Update strategies for kriging models used in variable fidelity optimization. Struct. Multidiscip. Optim. 2006, 32, 287–298. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A Simplex Method for Function Minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Subrahmanyam, M.B. An extension of the simplex method to constrained nonlinear optimization. J. Optim. Theory Appl. 1989, 62, 311–319. [Google Scholar] [CrossRef]
- Sasena, M.J.; Parkinson, M.; Reed, M.P.; Papalambros, P.Y.; Goovaerts, P. Improving an ergonomic testing procedure via approximation-based adaptive experimental design. ASME J. Mech. Des. 2005, 127, 1006–1013. [Google Scholar] [CrossRef] [Green Version]
- Stocki, R. Optymalizacja Niezawodnościowa Konstrukcji Prętowych w Zakresie Dużych Przemieszczeń, Teoria i Program Komputerowy. Ph.D. Thesis, IPPT PAN, Warszawa, Poland, 1999. (In Polish). [Google Scholar]
- Liefvendahl, M.; Stocki, R. A study on algorithms for optimization of Latin hypercubes. J. Stat. Plan. Inference 2006, 139, 3231–3247. [Google Scholar] [CrossRef] [Green Version]
- Park, J.-S. Optimal Latin-hypercube designs for computer experiments. J. Stat. Plan. Inference 1994, 39, 95–111. [Google Scholar] [CrossRef]
- Shimoyama, K.; Oyama, A.; Fujii, K. A new efficient and useful robust optimization approach-design for multi-objective six sigma. In Proceedings of the 2005 IEEE Congress on Evolutionary Computation, Edinburgh, UK, 2–5 September 2005; Volume 1, pp. 950–957. [Google Scholar]
- Rosenblatt, M. Remarks on a Multivariate Transformation. Ann. Math. Stat. 1952, 23, 470–472. [Google Scholar] [CrossRef]
- Nataf, A. Determination des distribution dont les marges sont donnees. Comptes Redus L’academie Sci. 1962, 225, 42–43. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Internal Force/Load Capacity | Meridian Bar No 33 | Parallel Bar No 56 |
|---|---|---|
| Ned [kN]–axial force | 45.675 | 85.187 |
| Nc,Rd [kN]–design capacity of the cross-section at uniform compression | 307.850 | 352.500 |
| Nb,Rd [kN]–design buckling capacity of the element in compression | 151.618 | 335.679 |
| Maximum vertical displacement [mm] | 9.36 | |
| Allowable vertical displacement [mm]–D/300 | 50.10 | |
| Maximum horizontal displacement [mm] | 1.08 | |
| Allowable horizontal displacement [mm]–H/150 | 6.80 | |
| Group | Node No. | Profile | Stress |
|---|---|---|---|
| Meridian | 1 to 48 | RK60 × 60 × 6.3 | 30% |
| Parallel | 49 to 80 | RK70 × 70 × 6 | 25% |
| Diagonals | 81 to 112 | RK50 × 50 × 5 | 0% |
| Internal Force/Load Capacity | Meridian Bar No. 34 | Parallel Bar No. 59 |
|---|---|---|
| Ned [kN]–axial force | 51.174 | 100.564 |
| Stress [%] | 34 | 30 |
| Maximum vertical displacement [mm] | 11.31 | |
| Allowable vertical displacement [mm]–D/300 | 50.1 | |
| Maximum horizontal displacement [mm] | 1.32 | |
| Allowable horizontal displacement [mm]–H/150 | 6.80 | |
| Internal Force/Load Capacity | Meridian Bar No. 34 | Parallel Bar No. 59 |
|---|---|---|
| NEd [kN] | 51.174 | 100.564 |
| Nc,Rd [kN] | 307.850 | 352.500 |
| Nb,Rd [kN] | 151.618 | 335.679 |
| Parameter | Meridian Bar No. 34 | Parallel Bar No. 59 |
|---|---|---|
| Ly= Lz—length of element [mm] | 2568.88 | 979.44 |
| Lcr,y = Lcr,z—buckling effective length [mm] | 2568.88 | 979.44 |
| Lamy = Lamz—slenderness of bar | 118.46 | 37.75 |
| Lam,y = Lam,z—relative slenderness of bar | 1.26 | 0.40 |
| χy = χz—buckling coefficient | 0.49 | 0.95 |
| Random Variables Xi | Mean Values [cm2] | Standard Deviation [cm2] | Coefficient of Variation [%] |
|---|---|---|---|
| P | 13.1 | 0.655 | 5 |
| R | 10.7 | 0.535 | 5 |
| Design Variable | Lower Bound [cm2] | Upper Bound [cm2] |
|---|---|---|
| P | 12.455 | 13.755 |
| R | 14.25 | 15.75 |
| Design Variable | Optimal Value [cm2] |
|---|---|
| P | 12.456 |
| R | 14.250 |
| Kriging | Second-Order | |
|---|---|---|
| Parameter γ | 0.5 | 0.5 |
| Assessment of the dispersion of the sample size | 48 | 48 |
| Sample size to generate RS base points | 48 | 48 |
| Optimal point | ||
| Random variable P | 12.455 | 12.455 |
| Random variable R | 14.726 | 14.732 |
| Value of optimised objective function | 0.971 | 0.972 |
| Approximated mass of the structure | 2435.53 | 2435.78 |
| Approximated value of mass standard deviation | 68.29 | 68.29 |
| Validation | ||
| Random variable P | 12.455 | 12.455 |
| Random variable R | 14.726 | 14.730 |
| Approximated mass of the structure | 2435.53 | 2435.78 |
| Approximated value of mass standard deviation | 68.29 | 68.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zabojszcza, P.; Radoń, U. Optimization of Steel Roof Framing Taking into Account the Random Nature of Design Parameters. Materials 2022, 15, 5017. https://doi.org/10.3390/ma15145017
Zabojszcza P, Radoń U. Optimization of Steel Roof Framing Taking into Account the Random Nature of Design Parameters. Materials. 2022; 15(14):5017. https://doi.org/10.3390/ma15145017
Chicago/Turabian StyleZabojszcza, Paweł, and Urszula Radoń. 2022. "Optimization of Steel Roof Framing Taking into Account the Random Nature of Design Parameters" Materials 15, no. 14: 5017. https://doi.org/10.3390/ma15145017
APA StyleZabojszcza, P., & Radoń, U. (2022). Optimization of Steel Roof Framing Taking into Account the Random Nature of Design Parameters. Materials, 15(14), 5017. https://doi.org/10.3390/ma15145017