
Survey of Localizing Gradient Damage in Static and Dynamic Tension of Concrete


Abstract
:1. Introduction
2. Fundamentals of Implemented Model
2.1. Thermodynamic Analysis
2.2. System of Matrix Equations
2.3. Applied Functions
3. Numerical Examples of Direct Tension
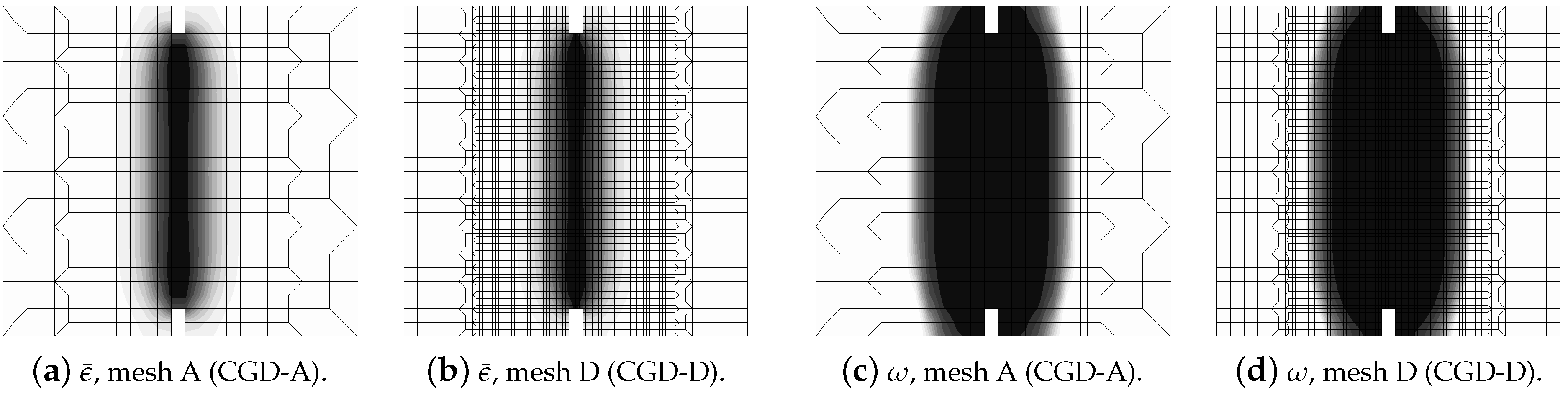
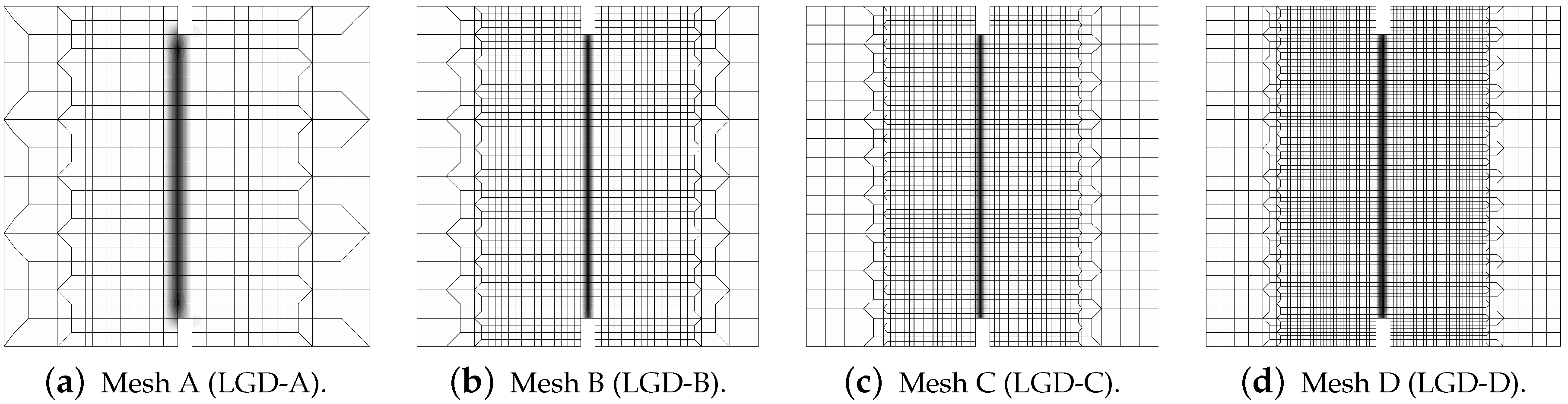
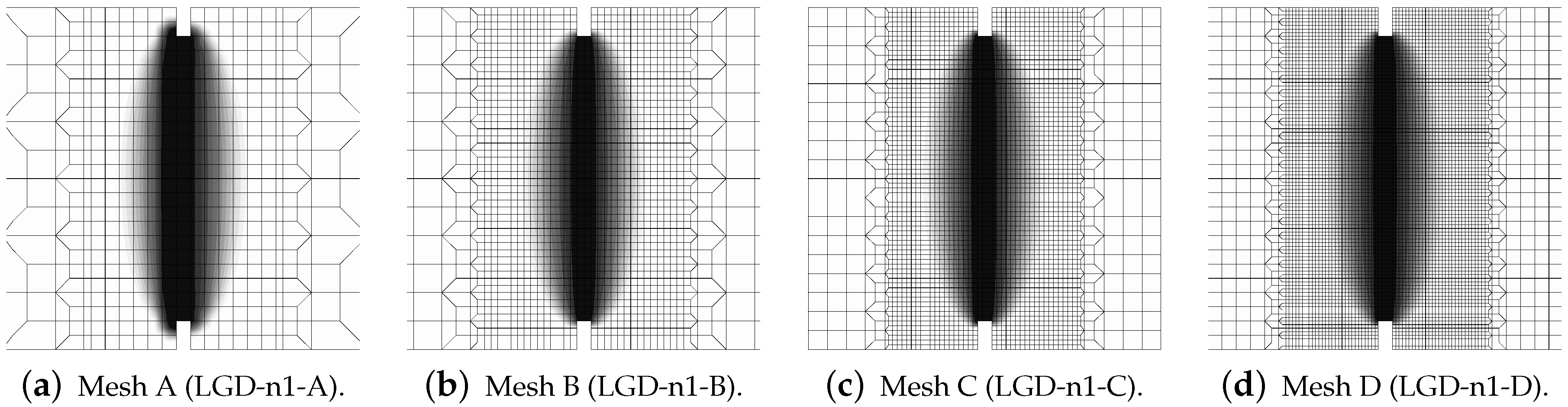
3.1. Static Tensile Cracking on Double-Edge-Notched Specimen
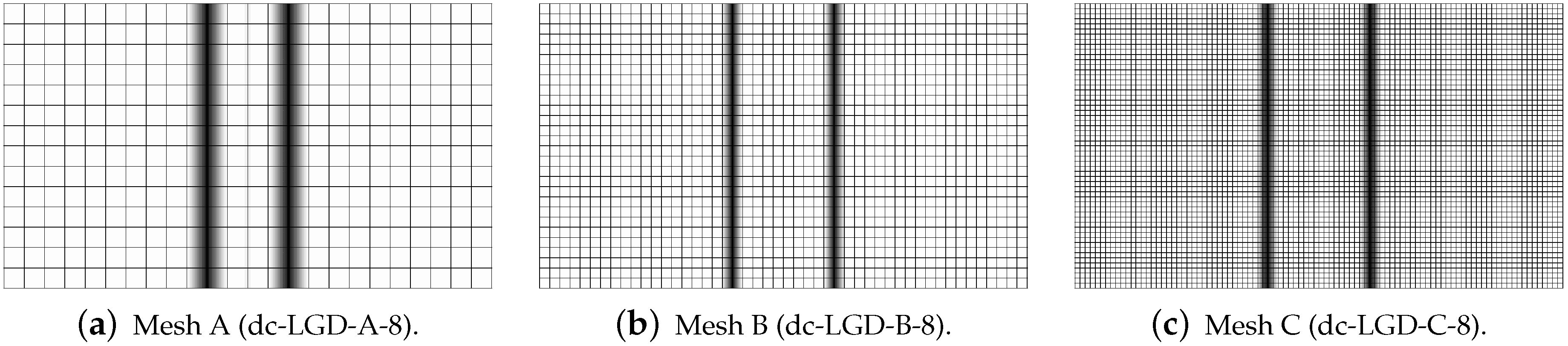
3.2. Direct Tension Test under Impact Loading
3.2.1. General Data
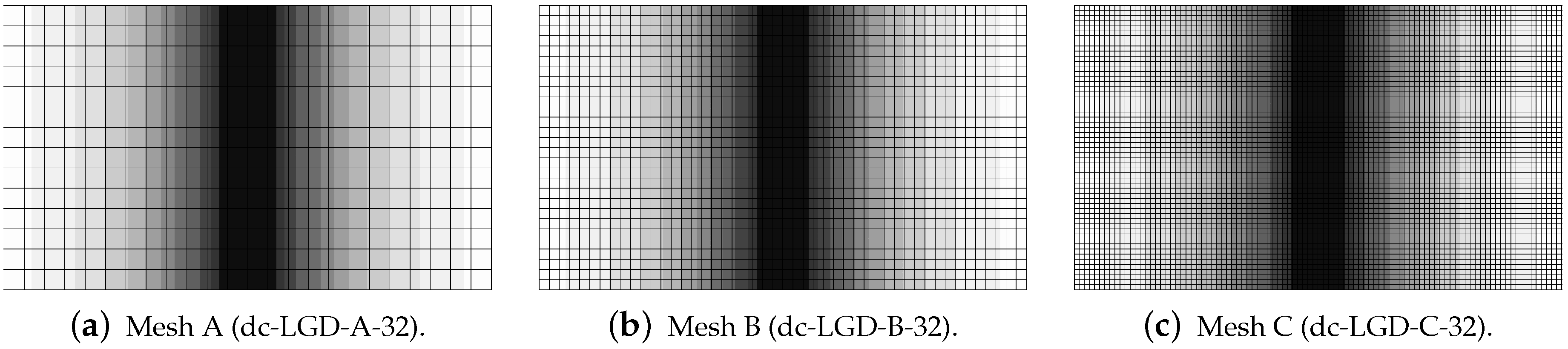
3.2.2. Results for Plain Concrete
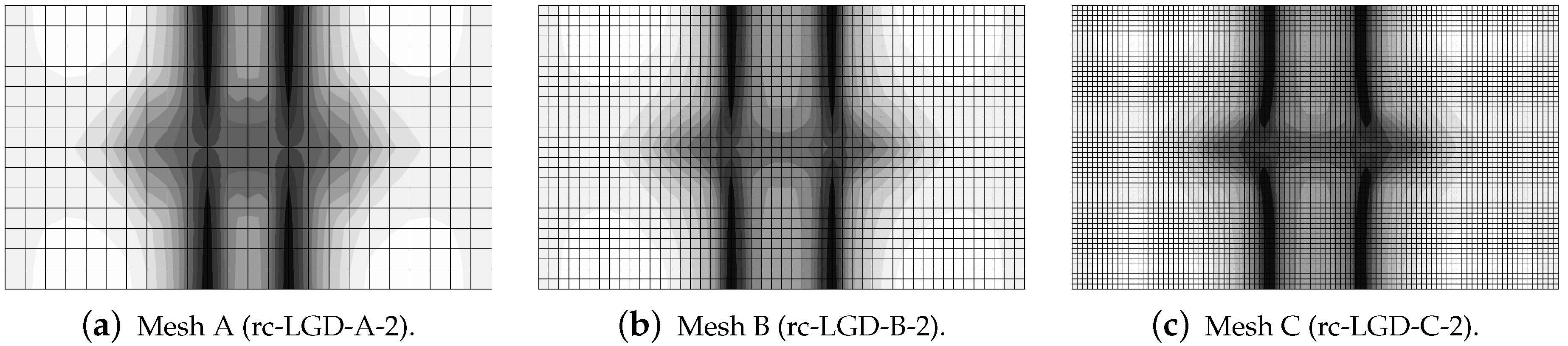
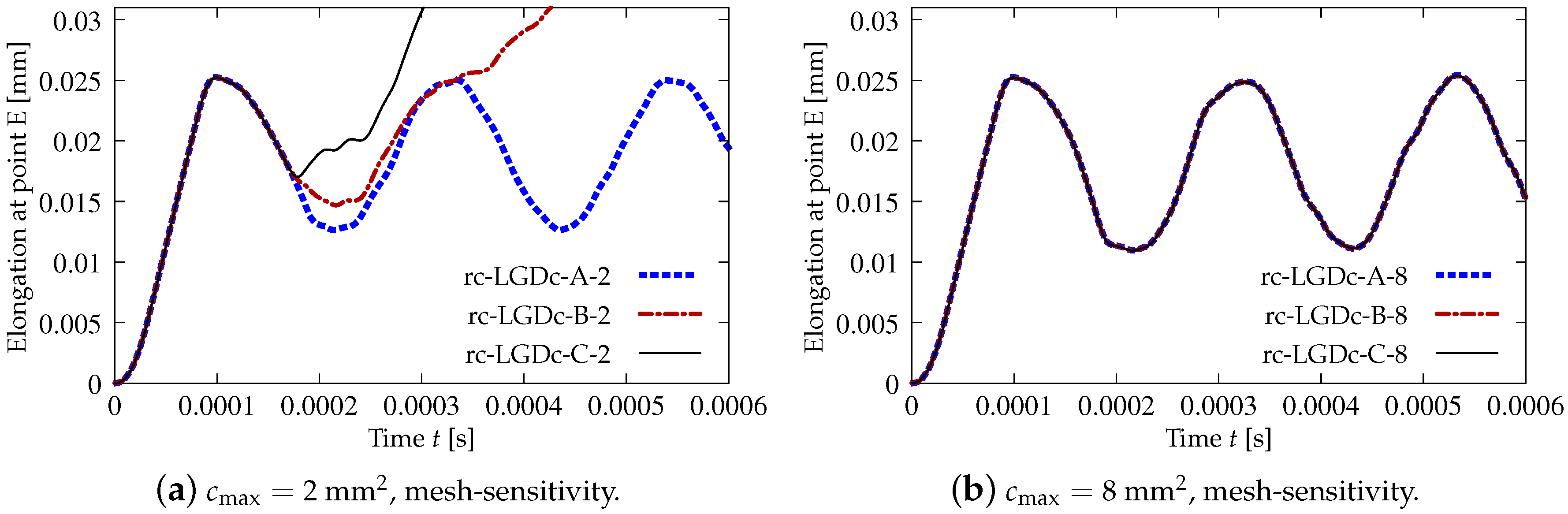
3.2.3. Results for Reinforced Concrete
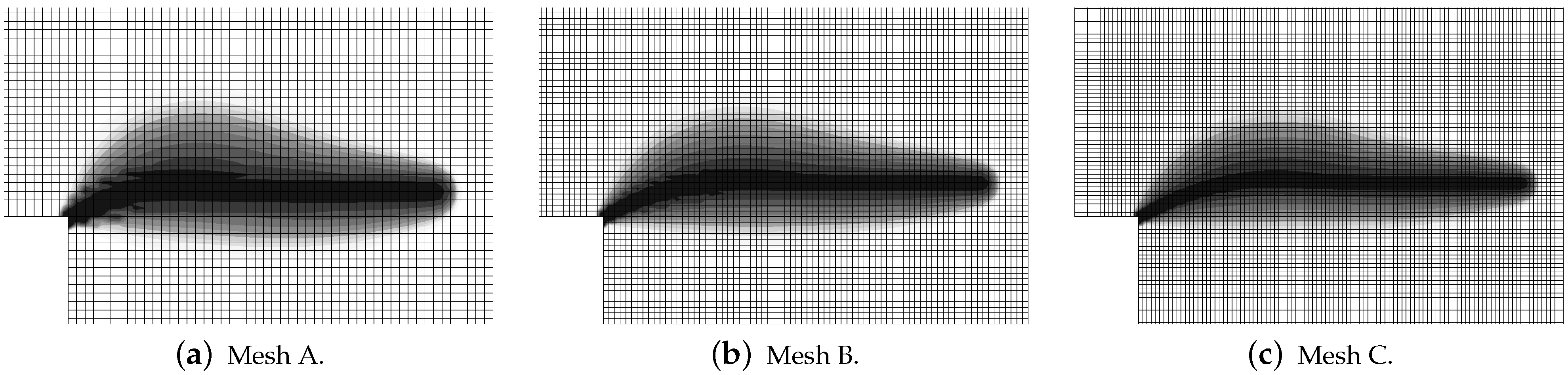
3.3. L-Shaped Specimen under Static and Dynamic Tensile Cracking
4. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CGD | conventional gradient damage |
| FE | finite element |
| FEM | finite element method |
| FEs | finite elements |
| (I)BVP | (initial) boundary value problem |
| LGD | localizing gradient damage |
| RC | reinforced concrete |
| TGD | transient gradient damage |
References
- Kachanov, L.M. Time of rupture process under creep conditions. Izd. Akad. Nauk SSSR Otd. Tekh. Nauk 1958, 8, 26–31. (In Russian) [Google Scholar]
- Rudnicki, J.W.; Rice, J.R. Conditions for the localization of deformation in pressure-sensitive dilatant materials. J. Mech. Phys. Solids 1975, 23, 371–394. [Google Scholar] [CrossRef]
- Pietruszczak, S.; Mróz, Z. Finite element analysis of deformation of strain-softening materials. Int. J. Numer. Meth. Eng. 1981, 17, 327–334. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Oh, B. Crack band theory for fracture of concrete. RILEM Mater. Struct. 1983, 16, 155–177. [Google Scholar] [CrossRef] [Green Version]
- Aifantis, E.C. On the microstructural origin of certain inelastic models. J. Eng. Mater. Technol. 1984, 106, 326–330. [Google Scholar] [CrossRef]
- Peerlings, R.H.J.; de Borst, R.; Brekelmans, W.A.M.; de Vree, J.H.P. Gradient-enhanced damage for quasi-brittle materials. Int. J. Numer. Meth. Eng. 1996, 39, 3391–3403. [Google Scholar] [CrossRef]
- Peerlings, R.H.J.; Massart, T.J.; Geers, M.G.D. A thermodynamically motivated implicit gradient damage framework and its application to brick masonry cracking. Comput. Methods Appl. Mech. Eng. 2004, 193, 3403–3417. [Google Scholar] [CrossRef]
- Dimitrijević, B.J.; Hackl, K. A method for gradient enhancement of continuum damage models. Tech. Mech. 2008, 28, 43–52. [Google Scholar]
- Peerlings, R.H.J.; Geers, M.G.D.; de Borst, R.; Brekelmans, W.A.M. A critical comparison of nonlocal and gradient-enhanced softening continua. Int. J. Solids Struct. 2001, 38, 7723–7746. [Google Scholar] [CrossRef]
- Park, T.; Ahmed, B.; Voyiadjis, G.Z. A review of continuum damage and plasticity in concrete: Part I—Theoretical framework. Int. J. Damage Mech. 2021, 10567895211068174. [Google Scholar] [CrossRef]
- Park, T.; Ahmed, B.; Voyiadjis, G.Z. A review of continuum damage and plasticity in concrete: Part II—Numerical framework. Int. J. Damage Mech. 2021, 10567895211063227. [Google Scholar] [CrossRef]
- Peerlings, R.H.J.; de Borst, R.; Brekelmans, W.A.M.; Geers, M.G.D. Gradient-enhanced damage modelling of concrete fracture. Mech. Cohes.-Frict. Mater. 1998, 3, 323–342. [Google Scholar] [CrossRef]
- Geers, M.G.D. Experimental Analysis and Computational Modelling of Damage and Fracture. Ph.D. Dissertation, Eindhoven University of Technology, Eindhoven, The Netherlands, 1997. [Google Scholar] [CrossRef]
- Geers, M.G.D.; de Borst, R.; Brekelmans, W.A.M.; Peerlings, R.H.J. Strain-based transient-gradient damage model for failure analyses. Comput. Methods Appl. Mech. Eng. 1998, 160, 133–153. [Google Scholar] [CrossRef]
- Di Luzio, G.; Bažant, Z.P. Spectral analysis of localization in nonlocal and over-nonlocal materials with softening plasticity or damage. Int. J. Solids Struct. 2005, 42, 6071–6100. [Google Scholar] [CrossRef] [Green Version]
- Poh, L.H.; Swaddiwudhipong, S. Gradient-enhanced softening material models. Int. J. Plast. 2009, 25, 2094–2121. [Google Scholar] [CrossRef]
- Brinkgreve, R.B.J. Geomaterial Models and Numerical Analysis of Softening. Ph.D. Dissertation, Delft University of Technology, Delft, The Netherlands, 1994. [Google Scholar]
- Bobiński, J.; Tejchman, J. Modelling of strain localization in quasi-brittle materials with nonlocal continuum models. In Proceedings of the EURO-C 2006 Conference, Mayrhofen, Austria, 27–30 March 2006; Taylor & Francis: London, UK; Leiden, The Netherlands, 2006; pp. 301–307. [Google Scholar]
- Grassl, P.; Jirásek, M. Plastic model with non-local damage applied to concrete. Int. J. Num. Anal. Meth. Geomech. 2006, 30, 71–90. [Google Scholar] [CrossRef]
- Jirásek, M.; Desmorat, R. Localization analysis of nonlocal models with damage-dependent nonlocal interaction. Int. J. Solids Struct. 2019, 174–175, 1–17. [Google Scholar] [CrossRef]
- Bui, Q.V. Initiation of damage with implicit gradient-enhanced damage models. Int. J. Solids Struct. 2010, 47, 2425–2435. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, G.D. A damage model with evolving nonlocal interactions. Int. J. Solids Struct. 2011, 48, 1544–1559. [Google Scholar] [CrossRef]
- Vandoren, B.; Simone, A. Modeling and simulation of quasi-brittle failure with continuous anisotropic stress-based gradient-enhanced damage models. Comput. Methods Appl. Mech. Eng. 2018, 332, 644–685. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, T.H.A.; Bui, T.Q.; Hirose, S. Smoothing gradient damage model with evolving anisotropic nonlocal interactions tailored to low-order finite elements. Comput. Methods Appl. Mech. Eng. 2018, 328, 498–541. [Google Scholar] [CrossRef]
- Vuong, C.D.; Bui, T.Q.; Hirose, S. Enhancement of the smoothing gradient damage model with alternative equivalent strain estimation for localization failure. Eng. Fract. Mech. 2021, 258, 108057. [Google Scholar] [CrossRef]
- Saroukhani, S.; Vafadari, R.; Simone, A. A simplified implementation of a gradient-enhanced damage model with transient length scale effects. Comput. Mech. 2013, 51, 899–909. [Google Scholar] [CrossRef]
- Poh, L.H.; Sun, G. Localizing gradient damage model with decreasing interaction. Int. J. Numer. Meth. Eng. 2017, 110, 503–522. [Google Scholar] [CrossRef]
- Sun, G. Localizing Gradient Damage Models for the Fracture of Quasi-Brittle Materials. Ph.D. Dissertation, National University of Singapore, Singapore, 2017. [Google Scholar]
- Jirásek, M. Regularized continuum damage formulations acting as localization limiters. In Proceedings of the Conference on Computational Modelling of Concrete and Concrete Structures (EURO-C 2018), Bad Hofgastein, Austria, 26 February–1 March 2018; CRC Press/Balkema: London, UK, 2018; pp. 25–41. [Google Scholar]
- Wosatko, A. Comparison of evolving gradient damage formulations with different activity functions. Arch. Appl. Mech. 2021, 91, 597–627. [Google Scholar] [CrossRef]
- Sarkar, S.; Singh, I.; Mishra, B.; Shedbale, A.; Poh, L. A comparative study and ABAQUS implementation of conventional and localizing gradient enhanced damage models. Finite Elem. Anal. Des. 2019, 160, 1–31. [Google Scholar] [CrossRef]
- Zhang, Y.; Shedbale, A.S.; Gan, Y.; Moon, J.; Poh, L.H. Size effect analysis of quasi-brittle fracture with localizing gradient damage model. Int. J. Damage Mech. 2021, 30, 1012–1035. [Google Scholar] [CrossRef]
- Shedbale, A.S.; Sun, G.; Poh, L.H. A localizing gradient enhanced isotropic damage model with Ottosen equivalent strain for the mixed-mode fracture of concrete. Int. J. Mech. Sci. 2021, 199, 106410. [Google Scholar] [CrossRef]
- Wang, Z.; Poh, L.H. A homogenized localizing gradient damage model with micro inertia effect. J. Mech. Phys. Solids 2018, 116, 370–390. [Google Scholar] [CrossRef]
- Wang, Z.; Shedbale, A.S.; Kumar, S.; Poh, L.H. Localizing gradient damage model with micro intertia effect for dynamic fracture. Comput. Methods Appl. Mech. Eng. 2019, 355, 492–512. [Google Scholar] [CrossRef]
- Tong, T.; Hua, G.; Liu, Z.; Liu, X.; Xu, T. Localizing gradient damage model coupled to extended microprestress-solidification theory for long-term nonlinear time-dependent behaviors of concrete structures. Mech. Mater. 2021, 154, 103713. [Google Scholar] [CrossRef]
- Sarkar, S.; Singh, I.; Mishra, B. Adaptive mesh refinement schemes for the localizing gradient damage method based on biquadratic-bilinear coupled-field elements. Eng. Fract. Mech. 2020, 223, 106790. [Google Scholar] [CrossRef]
- Taylor, R. FEAP—A Finite Element Analysis Program, Version 7.4, User Manual; University of California at Berkeley: Berkeley, CA, USA, 2001. [Google Scholar]
- Hordijk, D.A. Local Approach to Fatigue of Concrete. Ph.D. Dissertation, Delft University of Technology, Delft, The Netherlands, 1991. [Google Scholar]
- Rhee, I.; Lee, J.S.; Roh, Y.S. Fracture parameters of cement mortar with different structural dimensions under the direct tension test. Materials 2019, 12, 1850. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- van Mier, J.G.M.; van Vliet, M.R.A. Experimental investigation of size effect in concrete and sandstone under uniaxial tension. Eng. Fract. Mech. 2000, 65, 165–188. [Google Scholar] [CrossRef]
- Lee, S.K.; Woo, S.K.; Song, Y.C. Softening response properties of plain concrete by large-scale direct tension test. Mag. Concr. Res. 2008, 60, 33–40. [Google Scholar] [CrossRef]
- Ožbolt, J.; Bošnjak, J.; Sola, E. Dynamic fracture of concrete compact tension specimen: Experimental and numerical study. Int. J. Solids Struct. 2013, 50, 4270–4278. [Google Scholar] [CrossRef] [Green Version]
- Wosatko, A.; Winnicki, A.; Pamin, J. Simulations of concrete response to impact loading using two regularized models. Comput. Assist. Methods Eng. Sci. 2020, 27, 27–60. [Google Scholar] [CrossRef]
- Winkler, B.; Hofstetter, G.; Niederwanger, G. Experimental verification of a constitutive model for concrete cracking. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2001, 215, 75–86. [Google Scholar] [CrossRef]
- Ožbolt, J.; Bede, N.; Sharma, A.; Mayer, U. Dynamic fracture of concrete L-specimen: Experimental and numerical study. Eng. Fract. Mech. 2015, 148, 27–41. [Google Scholar] [CrossRef]
- Carneiro, F.L.L.B.; Barcellos, A. Tensile strength of concretes. RILEM Bull. 1953, 13, 97–123. [Google Scholar]
- Rocco, C.; Guinea, G.V.; Planas, J.; Elices, M. Mechanisms of Rupture in Splitting Tests. ACI Mater. J. 1999, 96, 52–60. [Google Scholar] [CrossRef]
- Suchorzewski, J.; Tejchman, J.; Nitka, M. Experimental and numerical investigations of concrete behaviour at meso-level during quasi-static splitting tension. Theor. Appl. Fract. Mech. 2018, 96, 720–739. [Google Scholar] [CrossRef]
- Ruiz, G.; Ortiz, M.; Pandolfi, A. Three-dimensional finite-element simulation of the dynamic Brazilian tests on concrete cylinders. Int. J. Numer. Meth. Eng. 2000, 48, 963–994. [Google Scholar] [CrossRef]
- Winnicki, A.; Pearce, C.J.; Bićanić, N. Viscoplastic Hoffman consistency model for concrete. Comput. Struct. 2001, 79, 7–19. [Google Scholar] [CrossRef]
- Wosatko, A.; Pamin, J.; Winnicki, A. Numerical analysis of Brazilian split test on concrete cylinder. Comput. Concr. 2011, 8, 243–278. [Google Scholar] [CrossRef]
- Chodkowski, P.; Bobiński, J.; Tejchman, J. Limits of enhanced of macro- and meso-scale continuum models for studying size effect in concrete under tension. Eur. J. Environ. Civ. Eng. 2021, 1–22. [Google Scholar] [CrossRef]
- Le Bellégo, C.; Dubé, J.F.; Pijaudier-Cabot, G.; Gérard, B. Calibration of nonlocal damage model from size effect tests. Eur. J. Mech. A/Solids 2003, 22, 33–46. [Google Scholar] [CrossRef] [Green Version]
- Grégoire, D.; Rojas-Solano, L.B.; Pijaudier-Cabot, G. Failure and size effect for notched and unnotched concrete beams. Int. J. Num. Anal. Meth. Geomech. 2013, 37, 1434–1452. [Google Scholar] [CrossRef]
- Hoover, C.G.; Bažant, Z.P.; Vorel, J.; Wendner, R.; Hubler, M.H. Comprehensive concrete fracture tests: Description and results. Eng. Fract. Mech. 2013, 114, 92–103. [Google Scholar] [CrossRef]
- Syroka-Korol, E.; Tejchman, J.; Mróz, Z. FE investigations of the effect of fluctuating local tensile strength on coupled energetic-statistical size effect in concrete beams. Eng. Struct. 2015, 103, 239–259. [Google Scholar] [CrossRef]
- van Mier, J.G.M.; van Vliet, M.R.A. Uniaxial tension test for the determination of fracture parameters of concrete: State of the art. Eng. Fract. Mech. 2002, 69, 235–247. [Google Scholar] [CrossRef]
- Liebe, T.; Steinmann, P.; Benallal, A. Theoretical and computational aspects of a thermodynamically consistent framework for geometrically linear gradient damage. Comput. Methods Appl. Mech. Eng. 2001, 190, 6555–6576. [Google Scholar] [CrossRef]
- Dimitrijević, B.J.; Hackl, K. A regularization framework for damage-plasticity models via gradient enhancement of the free energy. Int. J. Numer. Methods Biomed. Eng. 2011, 27, 1199–1210. [Google Scholar] [CrossRef]
- Forest, S. Micromorphic approach for gradient elasticity, viscoplasticity, and damage. ASCE J. Eng. Mech. 2009, 135, 117–131. [Google Scholar] [CrossRef]
- de Vree, J.H.P.; Brekelmans, W.A.M.; van Gils, M.A.J. Comparison of nonlocal approaches in continuum damage mechanics. Comput. Struct. 1995, 55, 581–588. [Google Scholar] [CrossRef] [Green Version]
- Mazars, J.; Pijaudier-Cabot, G. Continuum damage theory—Application to concrete. ASCE J. Eng. Mech. 1989, 115, 345–365. [Google Scholar] [CrossRef]
- Askes, H.; Pamin, J.; de Borst, R. Dispersion analysis and element-free Galerkin solutions of second- and fourth-order gradient-enhanced damage models. Int. J. Numer. Meth. Eng. 2000, 49, 811–832. [Google Scholar] [CrossRef]
- de Borst, R.; Pamin, J. Gradient plasticity in numerical simulation of concrete cracking. Eur. J. Mech. A/Solids 1996, 15, 295–320. [Google Scholar]
- Gutiérrez, M.A.; de Borst, R. Deterministic and stochastic analysis of size effects and damage evolution in quasi-brittle materials. Arch. Appl. Mech. 1999, 69, 655–676. [Google Scholar] [CrossRef]
- Pamin, J. Gradient plasticity and damage models: A short comparison. Comput. Mater. Sci. 2005, 32, 472–479. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Belytschko, T. Wave propagation in a strain-softening bar: Exact solution. ASCE J. Eng. Mech. 1985, 111, 381–389. [Google Scholar] [CrossRef] [Green Version]
- Pamin, J.; de Borst, R. Simulation of crack spacing using a reinforced concrete model with an internal length parameter. Arch. Appl. Mech. 1998, 68, 613–625. [Google Scholar] [CrossRef]
- Marzec, I.; Tejchman, J.; Mróz, Z. Numerical analysis of size effect in RC beams scaled along height or length using elasto-plastic-damage model enhanced by non-local softening. Finite Elem. Anal. Des. 2019, 157, 1–20. [Google Scholar] [CrossRef]
- Ferrara, L. A Contribution to the Modelling of Mixed Mode Fracture and Shear Transfer in Plain and Reinforced Concrete. Ph.D. Dissertation, Politechnico di Milano, Milan, Italy, 1998. [Google Scholar]
- di Prisco, M.; Ferrara, L.; Meftah, F.; Pamin, J.; de Borst, R.; Mazars, J.; Reynouard, J.M. Mixed mode fracture in plain and reinforced concrete: Some results on benchmark tests. Int. J. Fract. 2000, 103, 127–148. [Google Scholar] [CrossRef]
- Ožbolt, J.; Sharma, A. Numerical simulation of dynamic fracture of concrete through uniaxial tension and L-specimen. Eng. Fract. Mech. 2012, 85, 88–102. [Google Scholar] [CrossRef]
- Zreid, I.; Kaliske, M. Regularization of microplane damage models using an implicit gradient enhancement. Int. J. Solids Struct. 2014, 51, 3480–3489. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Marigo, J.J.; Guilbaud, D.; Potapov, S. Gradient damage modeling of brittle fracture in an explicit dynamics context. Int. J. Numer. Meth. Eng. 2016, 108, 1381–1405. [Google Scholar] [CrossRef] [Green Version]











































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Model | Type of | Mesh | n | |||
|---|---|---|---|---|---|---|---|
| CGD-A | CGD | A | 720 | ||||
| CGD-B | CGD | B | 720 | ||||
| CGD-C | CGD | C | 720 | ||||
| CGD-D | CGD | D | 720 | ||||
| LGD-A | LGD | A | 90 | ||||
| LGD-B | LGD | B | 90 | ||||
| LGD-C | LGD | C | 90 | ||||
| LGD-D | LGD | D | 90 | ||||
| LGD-n1-A | LGD | A | 100 | ||||
| LGD-n1-B | LGD | B | 100 | ||||
| LGD-n1-C | LGD | C | 100 | ||||
| LGD-n1-D | LGD | D | 100 | ||||
| LGD-c-A | LGD | A | 90 | ||||
| LGD-c-B | LGD | B | 90 | ||||
| LGD-c-C | LGD | C | 90 | ||||
| LGD-c-D | LGD | D | 90 |
| Plain Concrete | Reinforced Concrete | Model | Type of | Mesh | [mm] | R | n | |
|---|---|---|---|---|---|---|---|---|
| dc-CGD-C-8 | rc-CGD-C-8 | CGD | C | 400 | ||||
| dc-LGD-A-2 | rc-LGD-A-2 | LGD | A | 180 | ||||
| dc-LGD-B-2 | rc-LGD-B-2 | LGD | B | 180 | ||||
| dc-LGD-C-2 | rc-LGD-C-2 | LGD | C | 180 | ||||
| dc-LGD-A-8 | rc-LGD-A-8 | LGD | A | 180 | ||||
| dc-LGD-B-8 | rc-LGD-B-8 | LGD | B | 180 | ||||
| dc-LGD-C-8 | rc-LGD-C-8 | LGD | C | 180 | ||||
| dc-LGD-A-32 | LGD | A | 180 | |||||
| dc-LGD-B-32 | LGD | B | 180 | |||||
| dc-LGD-C-32 | LGD | C | 180 | |||||
| dc-LGD-C-8-R01 | LGD | C | 180 | |||||
| dc-LGD-C-8-R16 | LGD | C | 180 | |||||
| dc-LGD-C-8-e400 | LGD | C | 400 | |||||
| dc-LGDc-A-2 | rc-LGDc-A-2 | LGD | A | 180 | ||||
| dc-LGDc-B-2 | rc-LGDc-B-2 | LGD | B | 180 | ||||
| dc-LGDc-C-2 | rc-LGDc-C-2 | LGD | C | 180 | ||||
| dc-LGDc-A-8 | rc-LGDc-A-8 | LGD | A | 180 | ||||
| dc-LGDc-B-8 | rc-LGDc-B-8 | LGD | B | 180 | ||||
| dc-LGDc-C-8 | rc-LGDc-C-8 | LGD | C | 180 |
| Loading Rate | Time Step [s] | Number of Steps | Final Time [s] | Final Intensity [MPa] | Slope [MPa/s] |
|---|---|---|---|---|---|
| fast | 150 | ||||
| average | 300 | ||||
| slow | 366 |
| Section | Section 3.1 | Section 3.2 | Section 3.3 | ||
|---|---|---|---|---|---|
| Concrete models | CGD, LGD | LGD | CGD, LGD | ||
| Gradient activity | , , | , | , , | ||
| Specimen | double-edge-notched | unnotched | L-shaped | ||
| Concrete | plain | plain | reinforced | plain | |
| Analysis | statics | dynamics | statics | dynamics | |
| Increment | indirect displacement | standard Newmark | arc length | standard | |
| procedure | control | control | Newmark | ||
| Loading | static | impact, | static | dynamic, | |
| linear-constant | linear | ||||
| Number of meshes | 4 | 3 | 3 | ||
| Mesh type | densified near the notches | uniform | uniform or structural | uniform | |
| Shape | square, rectangular, | square | square, | square | |
| of FEs | trapezoidal | rectangular | |||
| Minimum size of FE | mm | 1 mm | mm | mm | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wosatko, A. Survey of Localizing Gradient Damage in Static and Dynamic Tension of Concrete. Materials 2022, 15, 1875. https://doi.org/10.3390/ma15051875
Wosatko A. Survey of Localizing Gradient Damage in Static and Dynamic Tension of Concrete. Materials. 2022; 15(5):1875. https://doi.org/10.3390/ma15051875
Chicago/Turabian StyleWosatko, Adam. 2022. "Survey of Localizing Gradient Damage in Static and Dynamic Tension of Concrete" Materials 15, no. 5: 1875. https://doi.org/10.3390/ma15051875
APA StyleWosatko, A. (2022). Survey of Localizing Gradient Damage in Static and Dynamic Tension of Concrete. Materials, 15(5), 1875. https://doi.org/10.3390/ma15051875