
Design and Control of a Trapezoidal Piezoelectric Bimorph Actuator for Optical Fiber Alignment



Abstract
:1. Introduction
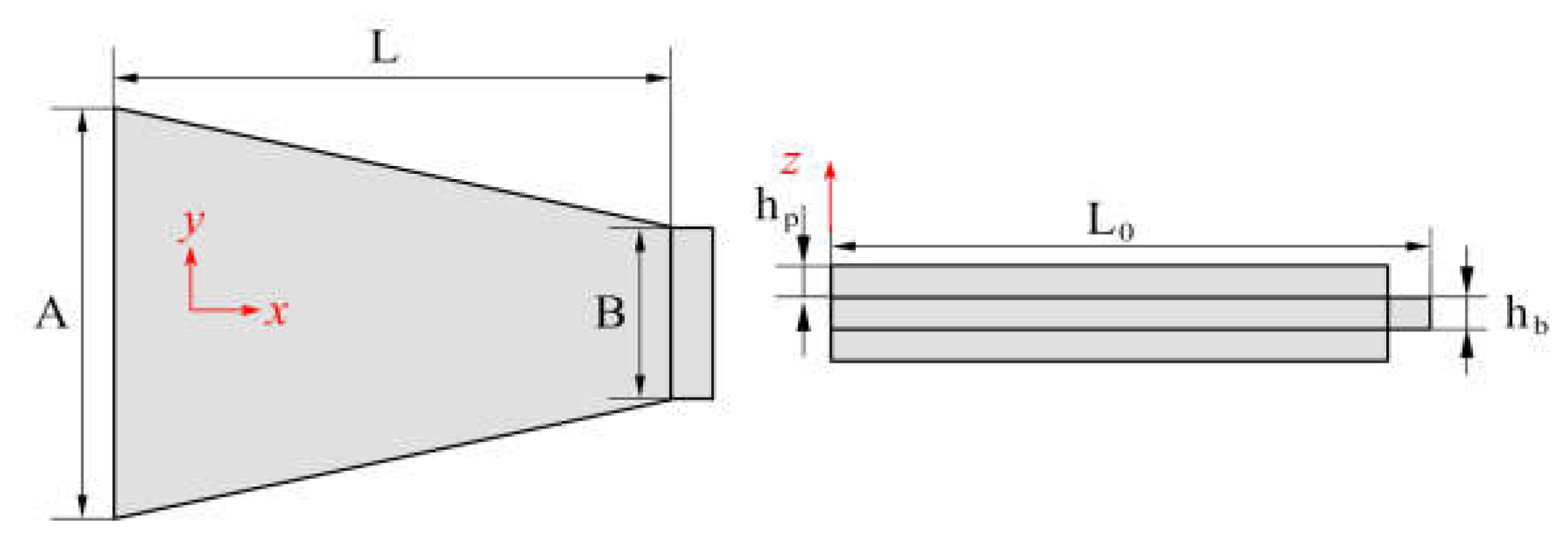
2. Structure Design
2.1. Principle of Aligning Two Optical Fibers
2.2. Structure of Piezo Actuator for Optical Fiber Alignment
3. Mathematical Model and Verification
3.1. Subsection
- The PZT-5H piezoelectric layer is completely attached to the middle layer so that there is no shear strain between the layers;
- The thickness of the adhesive layers can be ignored because they are much thinner than other layers;
- The width of the piezoelectric drive is much greater than its thickness;
- Piezoelectric materials are isotropic;
- The length of the neutral axis will not be changed, hence the strain on each layer is linear along the thickness direction;
- There is no axial load, only the load applied to the end of the actuator.
3.2. Verification with Mathematical and Finite Element Models
4. Output Displacement Analysis
4.1. Output Displacement Influenced by Width of Trapezoidal Baseline
4.2. Output Displacement Influenced by Length of Piezoelectric Layer
4.3. Output Displacement Influenced by Thickness of Piezoelectric Layer
4.4. Output Displacement Influenced by Thickness Ratio of Metal Layer to Piezoelectric Layer
4.5. Adjustment of Structural Parameters
5. Hysteresis Model and Parameter Identification
5.1. Hysteresis Loop Measurement
5.2. Prandtl–Ishlinskii Model
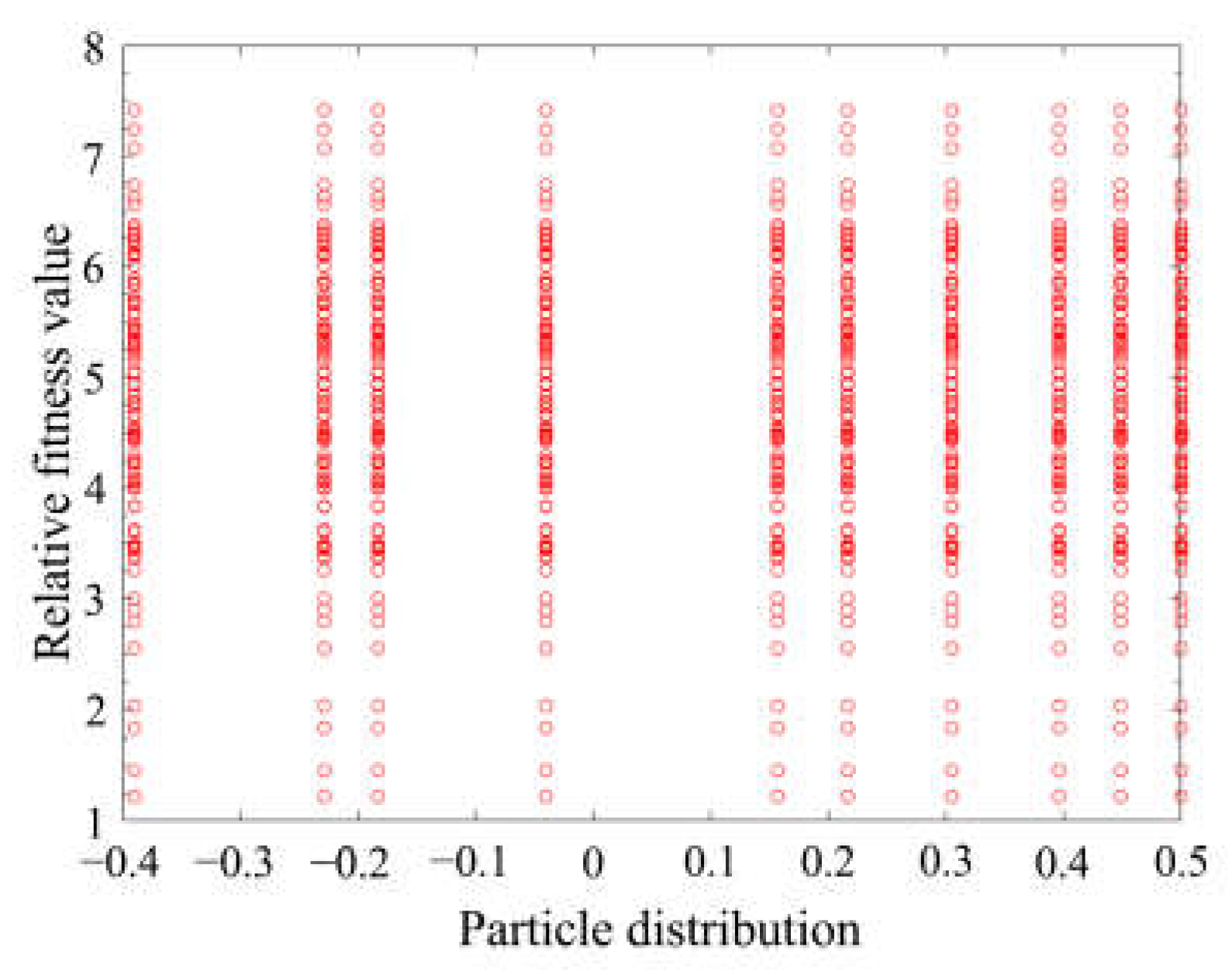
5.3. Parameter Identification Based on Particle Swarm Optimization
- Initialize the velocity of the particle.
- Where represents the ith particle in the primary population, and vmax and vmin are the minimal and maximal speed set in the particle swarm optimalization algorithm, respectively.
- To calculate the fitness of the particle, the fitness function is
- where x(t) are displacements from measurement and simulation model, respectively, when the time goes to t.
- Initialize and calculate iteratively optimal positions of individual and global optimization.
- Update the position and velocity of particles and generate new populations. To ensure that the updated speed and position are in the definition domain, v(v > vmax) = vmax is generally an efficient method for measuring the maximal speed boundary. And, the idea is the same for measurements of minimal speed boundary and position boundaries, as follows:
- where c1 and c2 are vectors composed of self and group learning factors, respectively. a1 and a2 are vectors composed of random numbers that are in the range of [0, 1]. represents the position vector of the ith particle at the tth evolution.
- Calculate the fitness value of each particle and compare it with the previously recorded individual optimal and global optimal positions. If the calculated fitness value is higher, it will be recorded as the new individual optimal or even global optimal position.
- Set the maximal evolutionary generation as 150 and check whether the evolutionary number meets the ending condition. If the number reaches the setting, the algorithm can be ended, otherwise, turn back to step 4.
6. Control of the Piezo Actuator
6.1. Feedforward Control
6.1.1. Inverse Hysteresis Model
6.1.2. Feedforward Control Effect
6.2. Fuzzy PID Control
6.2.1. Dynamic Model of the Piezo Actuator
6.2.2. Fuzzy PID Control Effect
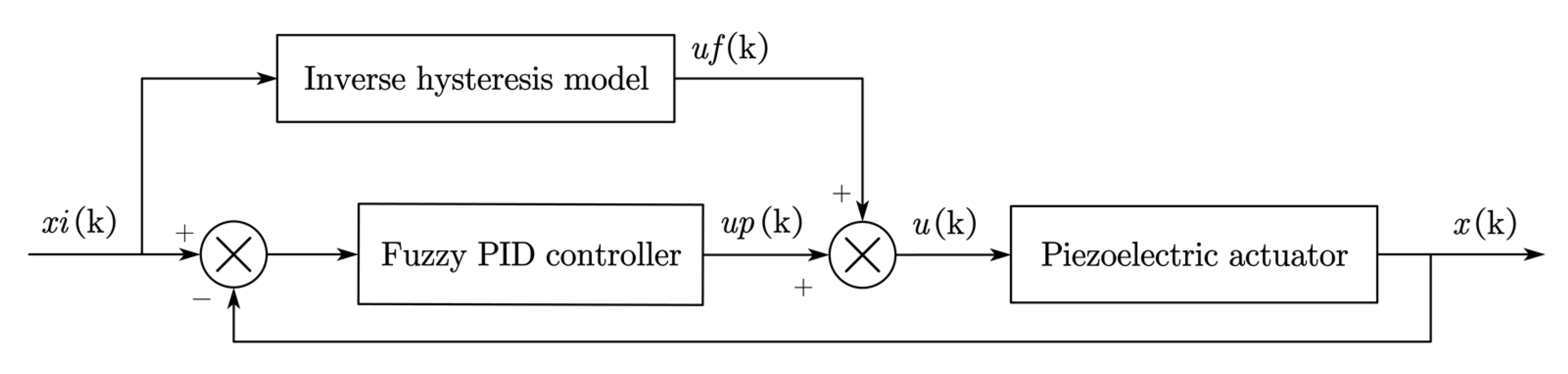
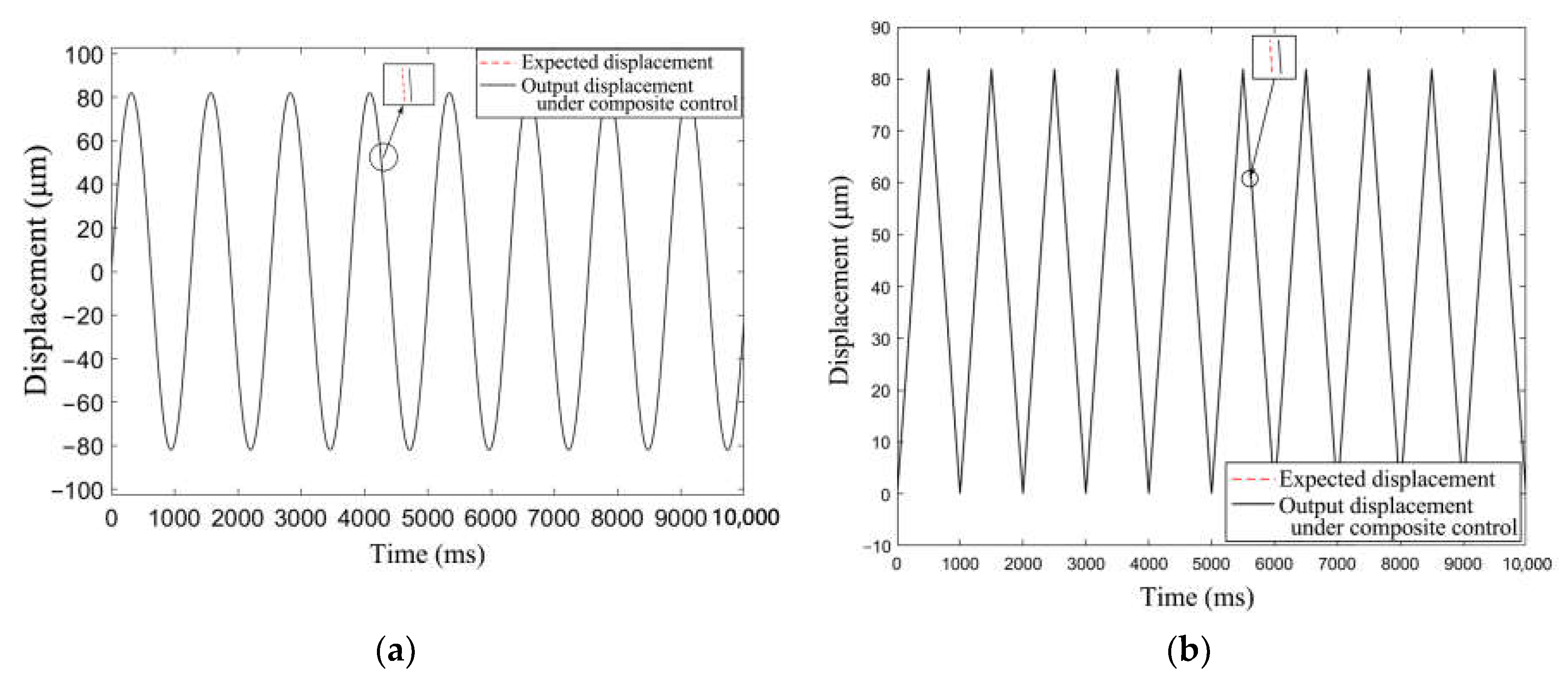
6.3. A Composite Control and Displacement Tracking Simulation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tanguy, Q.A.A.; Gaiffe, O.; Passilly, N.; Cote, J.-M.; Cabodevila, G.; Bargiel, S.; Lutz, P.; Xie, H.; Gorecki, C. Real-Time Lissajous Imaging with a Low-Voltage 2-Axis MEMS Scanner Based on Electrothermal Actuation. Opt. Express 2020, 28, 8512–8527. [Google Scholar] [CrossRef] [PubMed]
- Felder, J.; Lee, E.; DeVoe, D.L. Large Vertical Displacement Electrostatic Zipper Microstage Actuators. J. Microelectromechanical Syst. 2015, 24, 896–903. [Google Scholar] [CrossRef]
- Jia, S.; Peng, J.; Bian, J.; Zhang, S.; Xu, S.; Zhang, B. Design and Fabrication of a MEMS Electromagnetic Swing-Type Actuator for Optical Switch. Micromachines 2021, 12, 221. [Google Scholar] [CrossRef]
- Rios, S.A.; Fleming, A.J. Design of a Charge Drive for Reducing Hysteresis in a Piezoelectric Bimorph Actuator. IEEE/ASME Trans. Mechatron. 2016, 21, 51–54. [Google Scholar] [CrossRef]
- Garcés-Schröder, M.; Zimmermann, T.; Siemers, C.; Leester-Schädel, M.; Böl, M.; Dietzel, A. Shape Memory Alloy Actuators for Silicon Microgrippers. J. Microelectromechanical Syst. 2019, 28, 869–881. [Google Scholar] [CrossRef]
- Cochran, K.R.; Fan, L.; DeVoe, D.L. High-Power Optical Microswitch Based on Direct Fiber Actuation. Sens. Actuators A Phys. 2005, 119, 512–519. [Google Scholar] [CrossRef]
- Dai, J.; Feng, C.; Xie, J.; Gao, M.; Zhen, T. Design and Control of an Analog Optical Switch Based on the Coupling of an Electrothermal Actuator and a Mass–Spring System. IEEE/ASME Trans. Mechatron. 2023, 1–12. [Google Scholar] [CrossRef]
- Leung, M.; Yue, J.; Razak, K.A.; Haemmerle, E.; Hodgson, M.; Gao, W. Development of a 1 × 2 Piezoelectric Optical Fiber Switch. In Proceedings of the MEMS/MOEMS Technologies and Applications III, Beijing, China, 4 January 2008; Volume 6836, pp. 27–38. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z.; Huang, C.; Pu, M.; Lu, X.; Ma, X.; Guo, Y.; Luo, J.; Luo, X. Transmission–Reflection-Integrated Quadratic Phase Metasurface for Multifunctional Electromagnetic Manipulation in Full Space. Adv. Opt. Mater. 2022, 10, 2102111. [Google Scholar] [CrossRef]
- Hsieh, J.-C.; Lin, D.T.W.; Suen, M.-S. The Design of High Strength Electro-Thermal Micro-Actuator Based on the Genetic Algorithm. Microsyst. Technol. 2022, 26, 1113–1119. [Google Scholar] [CrossRef]
- Srinivasa Rao, K.; Hamza, M.; Ashok Kumar, P.; Girija Sravani, K. Design and Optimization of MEMS Based Piezoelectric Actuator for Drug Delivery Systems. Microsyst. Technol. 2020, 26, 1671–1679. [Google Scholar] [CrossRef]
- Fath, A.; Xia, T.; Li, W. Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems. Micromachines 2022, 13, 1422. [Google Scholar] [CrossRef] [PubMed]
- Aggogeri, F.; Merlo, A.; Pellegrini, N. Active vibration control development in ultra-precision machining. J. Vib. Control 2021, 27, 790–801. [Google Scholar] [CrossRef]
- Xu, Z.; Sun, W.; Li, X.; Huang, H.; Dong, J. A Stick-Slip Piezoelectric Actuator with High Assembly Interchangeability. Int. J. Mech. Sci. 2022, 233, 107662. [Google Scholar] [CrossRef]
- Rasid, S.M.R.; Michael, A.; Pota, H.R. Dynamic Modeling of a Piezoelectric Micro-Lens Actuator with Experimental Validation. Sens. Actuators A Phys. 2023, 356, 114344. [Google Scholar] [CrossRef]
- Sumit, S.; Shukla, R.; Sinha, A.K.; Kane, S.R. Response of Piezoelectric Ceramic Actuator under High Electric Field in Bending Mode. In Proceedings of the AIP Conference Proceedings 2648, Hyderabad, India, 26–27 November 2021; Available online: https://pubs.aip.org/aip/acp/article-abstract/2648/1/020014/2831383/Response-of-piezoelectric-ceramic-actuator-under (accessed on 12 August 2023).
- Ozaki, T.; Ohta, N.; Hamaguchi, K. Resonance-Driven Passive Folding/Unfolding Flapping Wing Actuator. Appl. Sci. 2020, 10, 3771. [Google Scholar] [CrossRef]
- Wood, R.J.; Steltz, E.; Fearing, R.S. Optimal Energy Density Piezoelectric Bending Actuators. Sens. Actuators A Phys. 2005, 119, 476–488. [Google Scholar] [CrossRef]
- Xia, X.; Zhang, W.; Zhao, J.; Wu, G.; Jiang, C. Design and Manufacture of a Quadrupedal Microrobot Based on Piezoelectric Actuators with Enhanced Base. In Proceedings of the 2021 International Conference on Autonomous Unmanned Systems (ICAUS 2021), Changsha, China, 24–26 September 2021; Wu, M., Niu, Y., Gu, M., Cheng, J., Eds.; Springer: Singapore, 2022; pp. 860–870. [Google Scholar] [CrossRef]
- Zorić, N.D.; Tomović, A.M.; Obradović, A.M.; Radulović, R.D.; Petrović, G.R. Active Vibration Control of Smart Composite Plates Using Optimized Self-Tuning Fuzzy Logic Controller with Optimization of Placement, Sizing and Orientation of PFRC Actuators. J. Sound Vib. 2019, 456, 173–198. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, P.; Wang, H.; Qiu, J.; Yang, G. A Piezo Driver for Piezoelectric Bimorph Actuators in Micro-Positioning Application. Int. J. Appl. Electromagn. Mech. 2020, 64, 615–620. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Derbeli, M.; Calvo, I. Design and Experimental Validation of a Piezoelectric Actuator Tracking Control Based on Fuzzy Logic and Neural Compensation. Fuzzy Sets Syst. 2023, 464, 108449. [Google Scholar] [CrossRef]
- Behjati, P.; Vahid Dastjerdi, H.; Mahdavi, R. Influence of Ageing Process on Sound Velocity in C17200 Copper–Beryllium Alloy. J. Alloy. Compd. 2010, 505, 739–742. [Google Scholar] [CrossRef]
- Gao, X.; Yang, J.; Wu, J.; Xin, X.; Li, Z.; Yuan, X.; Shen, X.; Dong, S. Piezoelectric Actuators and Motors: Materials, Designs, and Applications. Adv. Mater. Technol. 2019, 5, 1900716. [Google Scholar] [CrossRef]
- Anomalous Elastic Moduli and Internal Frictions in Unpoled and Poled Lead Titanate Zirconate Ceramics near the Curie Temperature. AIP Adv. 2020, 10, 45007. Available online: https://pubs.aip.org/aip/adv/article/10/4/045007/859466 (accessed on 12 August 2023).
- Chattaraj, N.; Ganguli, R. Performance Improvement of a Piezoelectric Bimorph Actuator by Tailoring Geometry. Mech. Adv. Mater. Struct. 2018, 25, 829–835. [Google Scholar] [CrossRef]
- Li, D.; Sun, B.; Dong, W.; Zhang, H. Study on displacement model for piezo-bimorph actuator. China Mech. Eng. 2003, 14, 65–67+5. [Google Scholar] [CrossRef]
- York, P.; Jafferis, N.; Wood, R. Millimeter-Sized Piezoelectric Flextensional Actuators with Improved Mechanical Efficiency. Sens. Actuators A Phys. 2020, 311, 112066. [Google Scholar] [CrossRef]
- Shi, B.; Shi, R.; Wang, F. Design of an Adaptive Feedforward/Feedback Combined Control for Piezoelectric Actuated Micro Positioning Stage. Precis. Eng. 2022, 78, 199–205. [Google Scholar] [CrossRef]
- Sabarianand, D.V.; Karthikeyan, P.; Muthuramalingam, T. A Review on Control Strategies for Compensation of Hysteresis and Creep on Piezoelectric Actuators Based Micro Systems. Mech. Syst. Signal Process. 2020, 140, 106634. [Google Scholar] [CrossRef]
- Baleanu, D.; Ullah, M.Z.; Mallawi, F.; Saleh Alshomrani, A. A New Generalization of the Fractional Euler–Lagrange Equation for a Vertical Mass-Spring-Damper. J. Vib. Control 2021, 27, 2513–2522. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | A | B | L | L0 | hp | hb |
|---|---|---|---|---|---|---|
| Value (μm) | 8000 | 4000 | 10,000 | 10,500 | 125 | 125 |
| Parameter | A | B | L | L0 | hp | hb |
|---|---|---|---|---|---|---|
| Value (μm) | 8000 | 4000 | 14,000 | 10,500 | 150 | 125 |
| Threshold Value | Weight Coefficient | Threshold Value | Weight Coefficient | ||
|---|---|---|---|---|---|
| 1 | 0 | 0.4437 | 6 | 40 | −0.4379 |
| 2 | 8 | 0.4327 | 7 | 48 | 0.4215 |
| 3 | 16 | 0.0600 | 8 | 56 | 0.2314 |
| 4 | 24 | 0.1557 | 9 | 64 | −0.1121 |
| 5 | 32 | −0.0923 | 10 | 72 | −0.3278 |
| Threshold Value | Weight Coefficient | Threshold Value | Weight Coefficient | ||
|---|---|---|---|---|---|
| 1 | 0 | 2.2536 | 6 | 40 | 0.0225 |
| 2 | 8 | −1.1126 | 7 | 48 | −0.0158 |
| 3 | 16 | −0.0251 | 8 | 56 | −0.0059 |
| 4 | 24 | −0.0238 | 9 | 64 | 0.0020 |
| 5 | 32 | 0.0071 | 10 | 72 | 0.0047 |
| kp | EC | |||||||
|---|---|---|---|---|---|---|---|---|
| FD | FZ | FX | Z | ZX | ZZ | ZD | ||
| E | FD | ZD | ZD | ZZ | ZZ | ZX | Z | Z |
| FZ | ZD | ZD | ZZ | ZX | ZX | Z | FX | |
| FX | ZZ | ZZ | ZZ | ZX | Z | FX | FX | |
| Z | ZZ | ZZ | ZX | Z | FX | FZ | FZ | |
| ZX | ZX | ZX | Z | FX | FX | FZ | FZ | |
| ZZ | ZX | Z | FX | FZ | FZ | FZ | FD | |
| ZD | Z | Z | FZ | FZ | FZ | FD | FD | |
| ki | EC | |||||||
|---|---|---|---|---|---|---|---|---|
| FD | FZ | FX | Z | ZX | ZZ | ZD | ||
| E | FD | FD | FD | FZ | FZ | FX | Z | Z |
| FZ | FD | FD | FZ | FX | FX | Z | Z | |
| FX | FD | FZ | FX | FX | Z | ZX | ZX | |
| Z | FZ | FZ | FX | Z | ZX | ZZ | ZZ | |
| ZX | FZ | FX | Z | ZX | ZX | ZZ | ZD | |
| ZZ | Z | Z | ZX | ZX | ZZ | ZD | ZD | |
| ZD | Z | Z | ZX | ZZ | ZZ | ZD | ZD | |
| kd | EC | |||||||
|---|---|---|---|---|---|---|---|---|
| FD | FZ | FX | Z | ZX | ZZ | ZD | ||
| E | FD | ZX | FX | FD | FD | FD | FZ | ZX |
| FZ | ZX | FX | FD | FZ | FZ | FX | Z | |
| FX | Z | FX | FZ | FZ | FX | FX | Z | |
| Z | Z | FX | FX | FX | FX | FX | Z | |
| ZX | Z | Z | Z | Z | Z | Z | Z | |
| ZZ | ZD | FX | ZX | ZX | ZX | ZX | ZD | |
| ZD | ZD | ZZ | ZZ | ZZ | ZX | ZX | ZD | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Li, J.; Lu, X. Design and Control of a Trapezoidal Piezoelectric Bimorph Actuator for Optical Fiber Alignment. Materials 2023, 16, 5811. https://doi.org/10.3390/ma16175811
Wang X, Li J, Lu X. Design and Control of a Trapezoidal Piezoelectric Bimorph Actuator for Optical Fiber Alignment. Materials. 2023; 16(17):5811. https://doi.org/10.3390/ma16175811
Chicago/Turabian StyleWang, Xinjie, Jianhui Li, and Xingfan Lu. 2023. "Design and Control of a Trapezoidal Piezoelectric Bimorph Actuator for Optical Fiber Alignment" Materials 16, no. 17: 5811. https://doi.org/10.3390/ma16175811
APA StyleWang, X., Li, J., & Lu, X. (2023). Design and Control of a Trapezoidal Piezoelectric Bimorph Actuator for Optical Fiber Alignment. Materials, 16(17), 5811. https://doi.org/10.3390/ma16175811