
A Thermo-Electro-Viscoelastic Model for Dielectric Elastomers

Abstract
:1. Introduction
2. Theoretical Framework
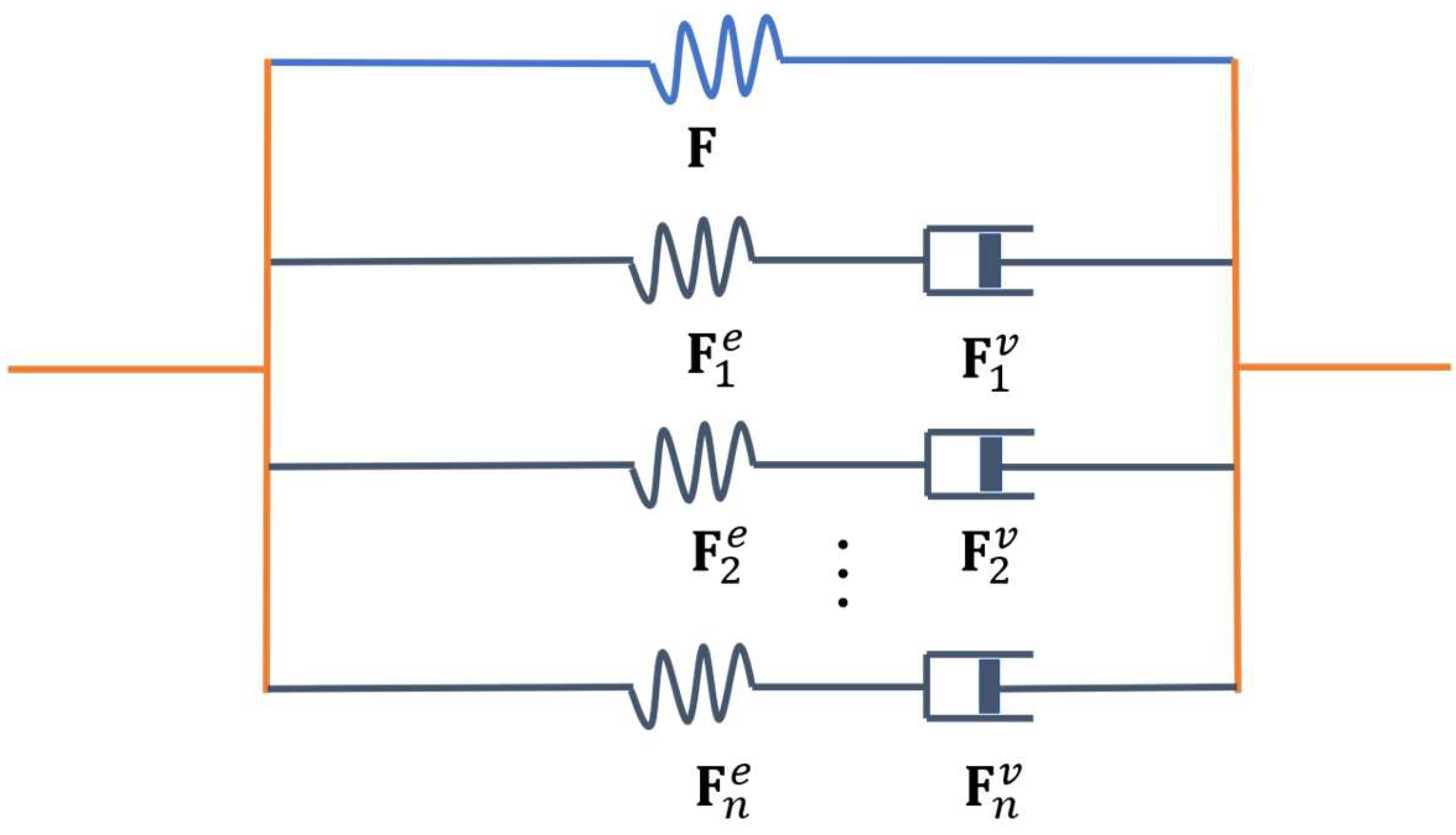
2.1. Kinematics
2.2. Balance Laws and Entropy Inequality
2.3. Constitutive Equations
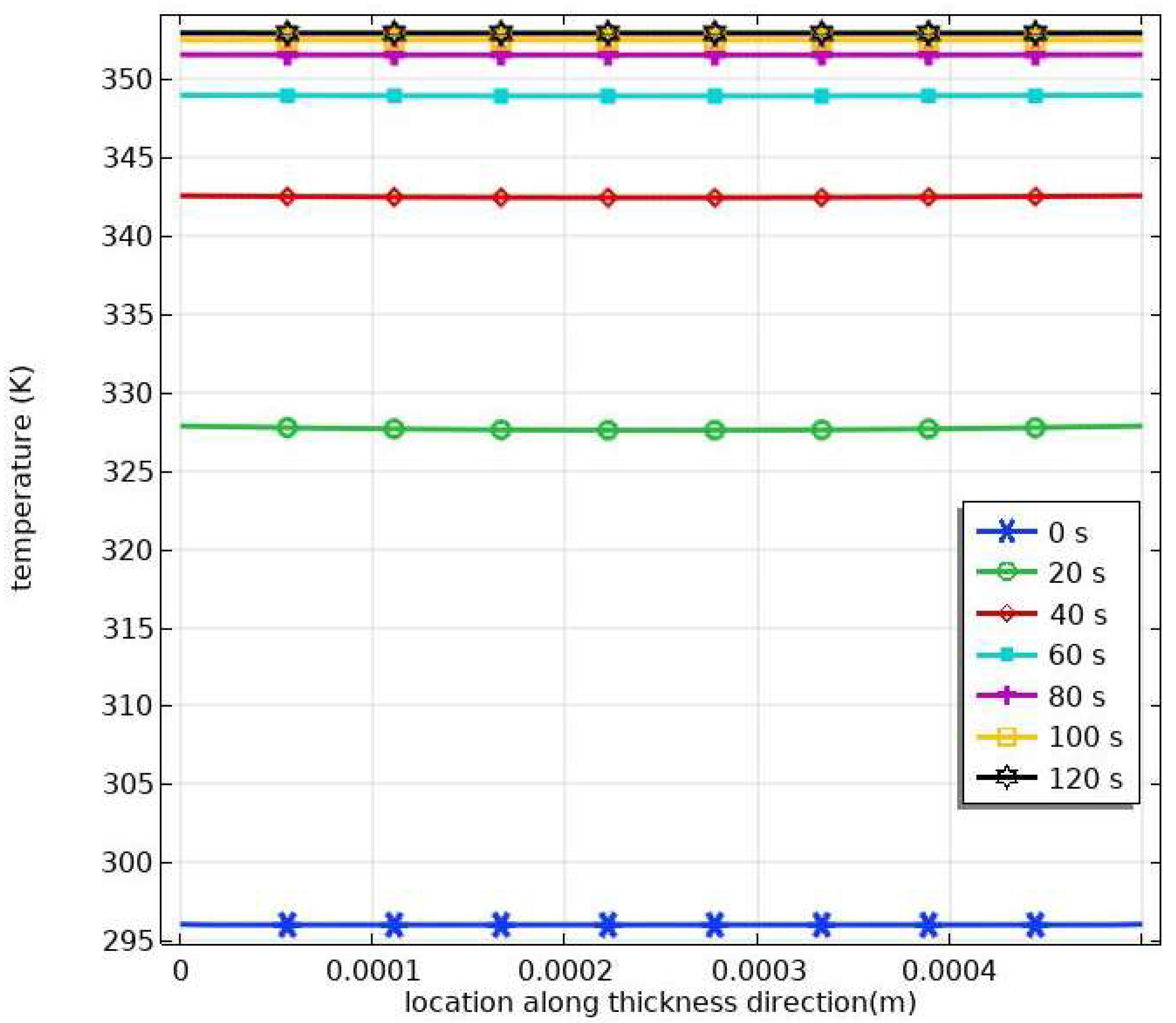
2.4. Heat Conduction
3. Special Cases
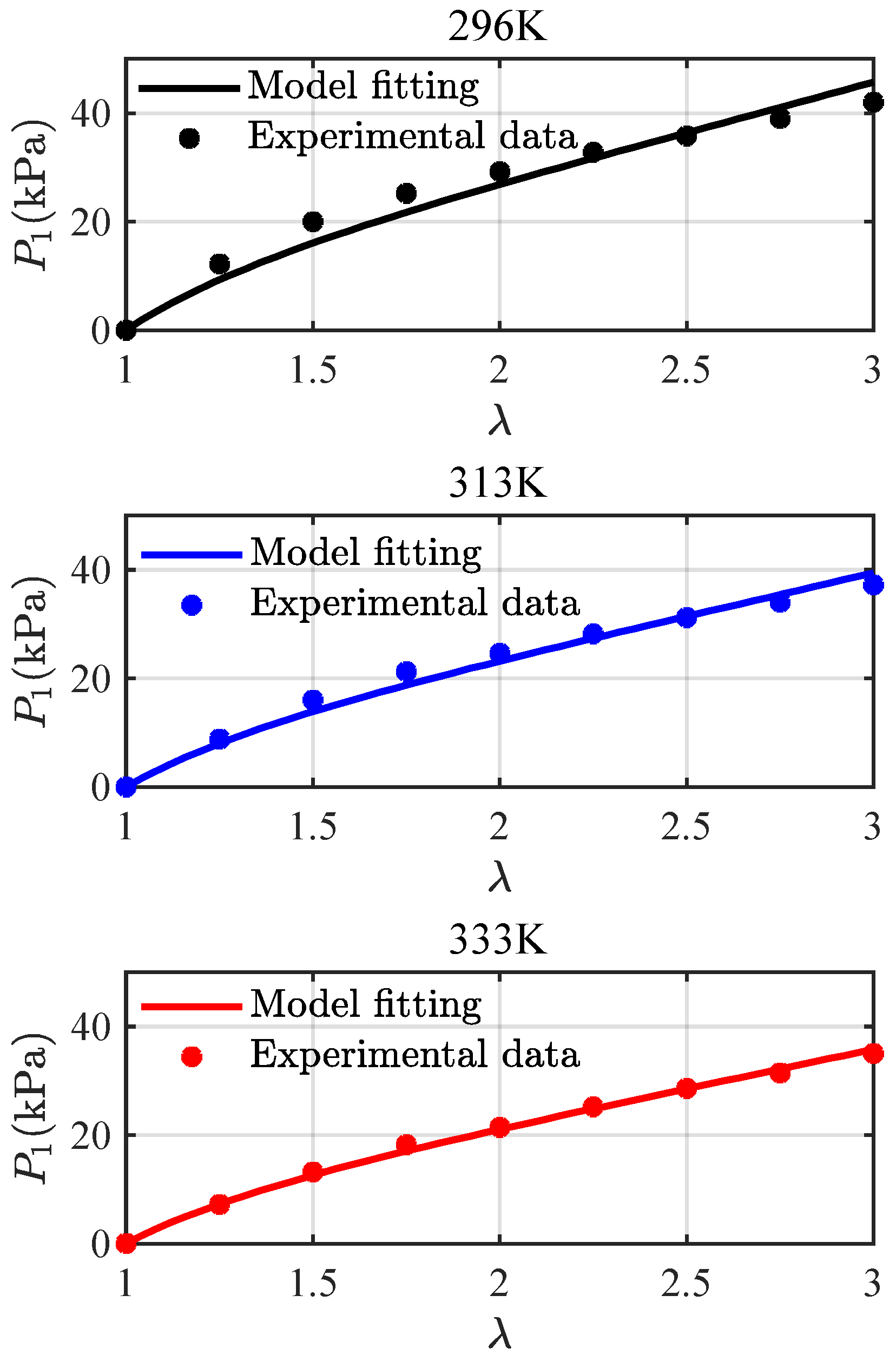
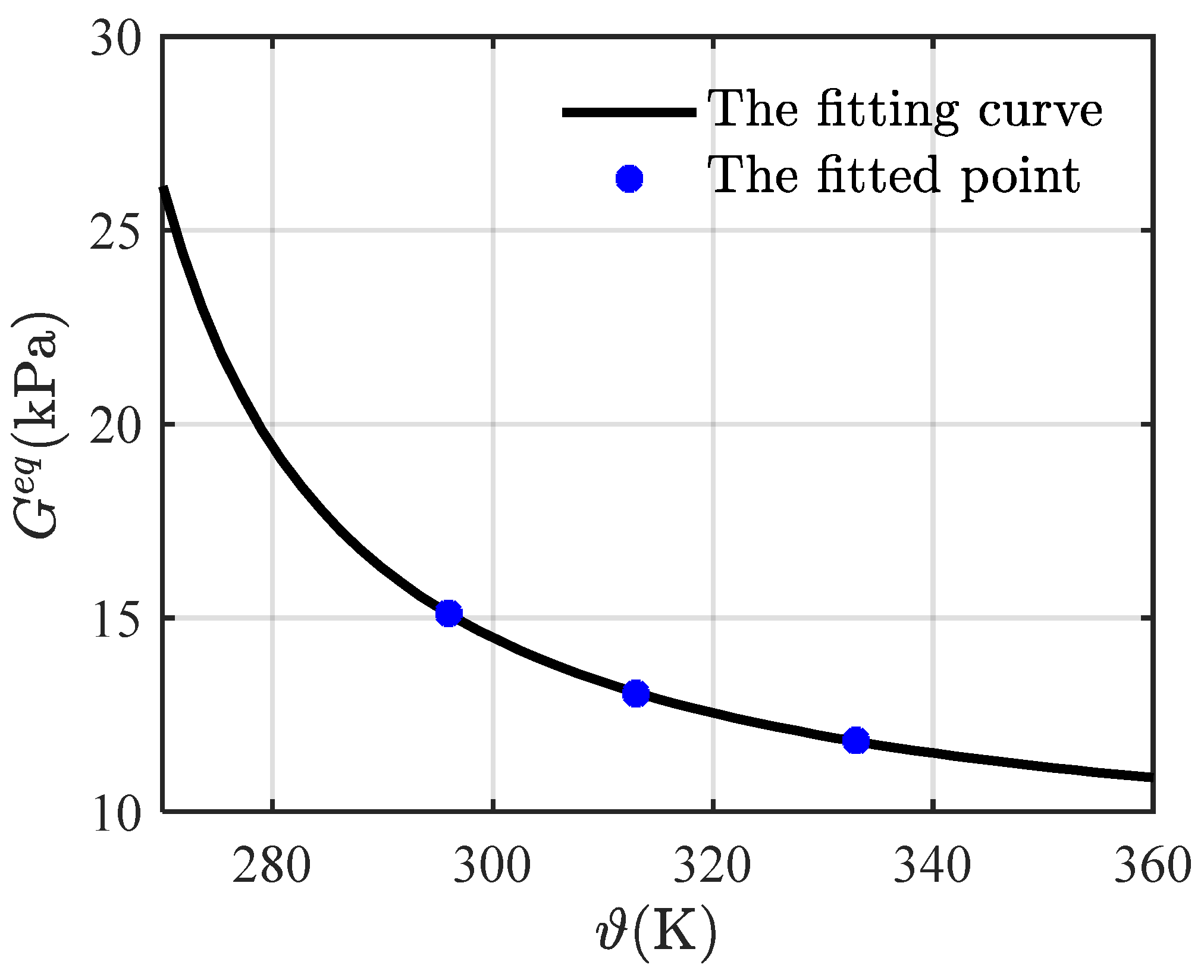
3.1. Specific Constitutive Equations
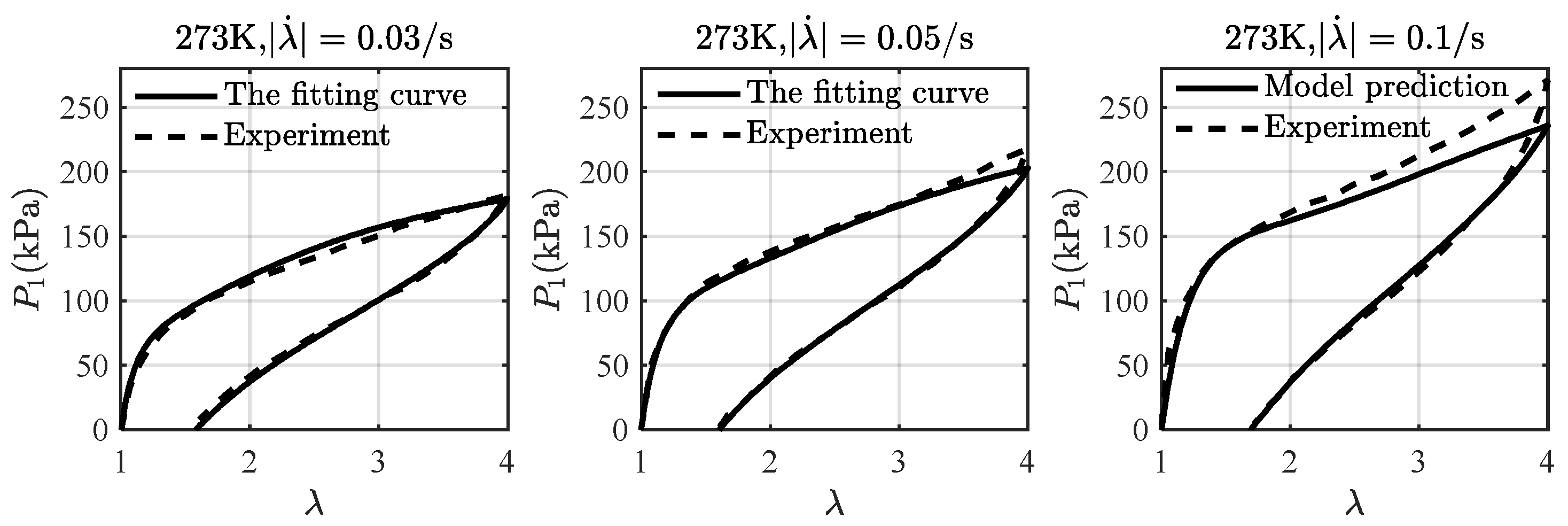
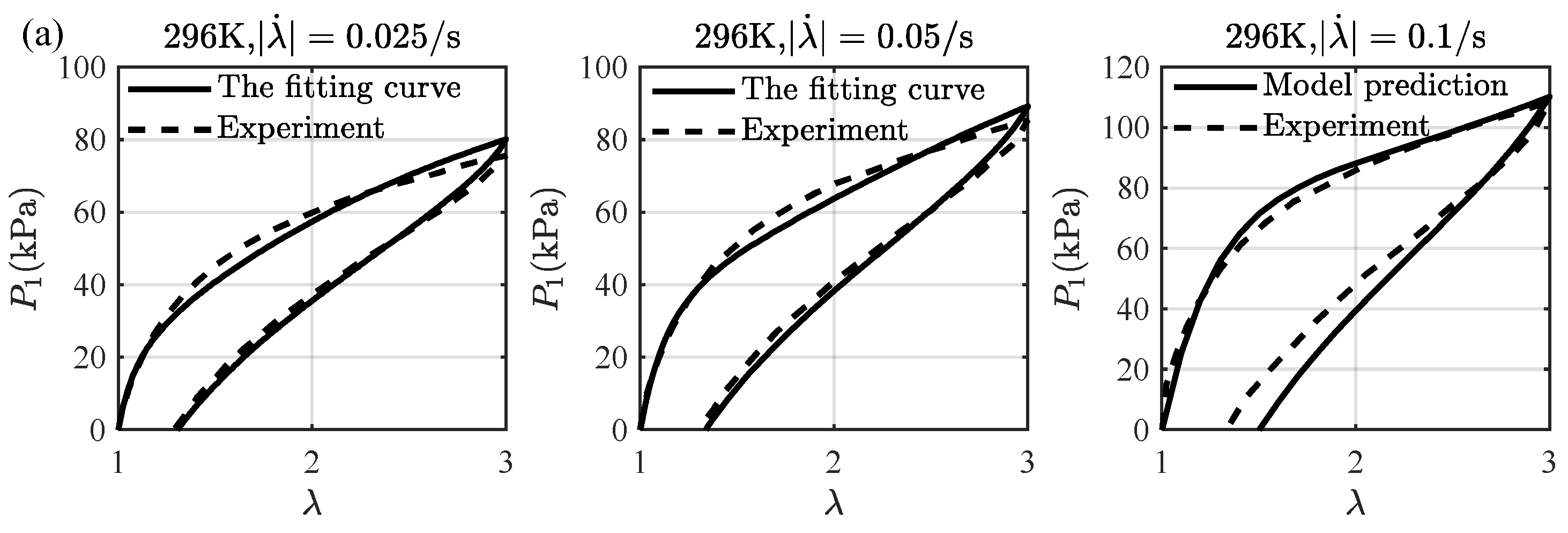
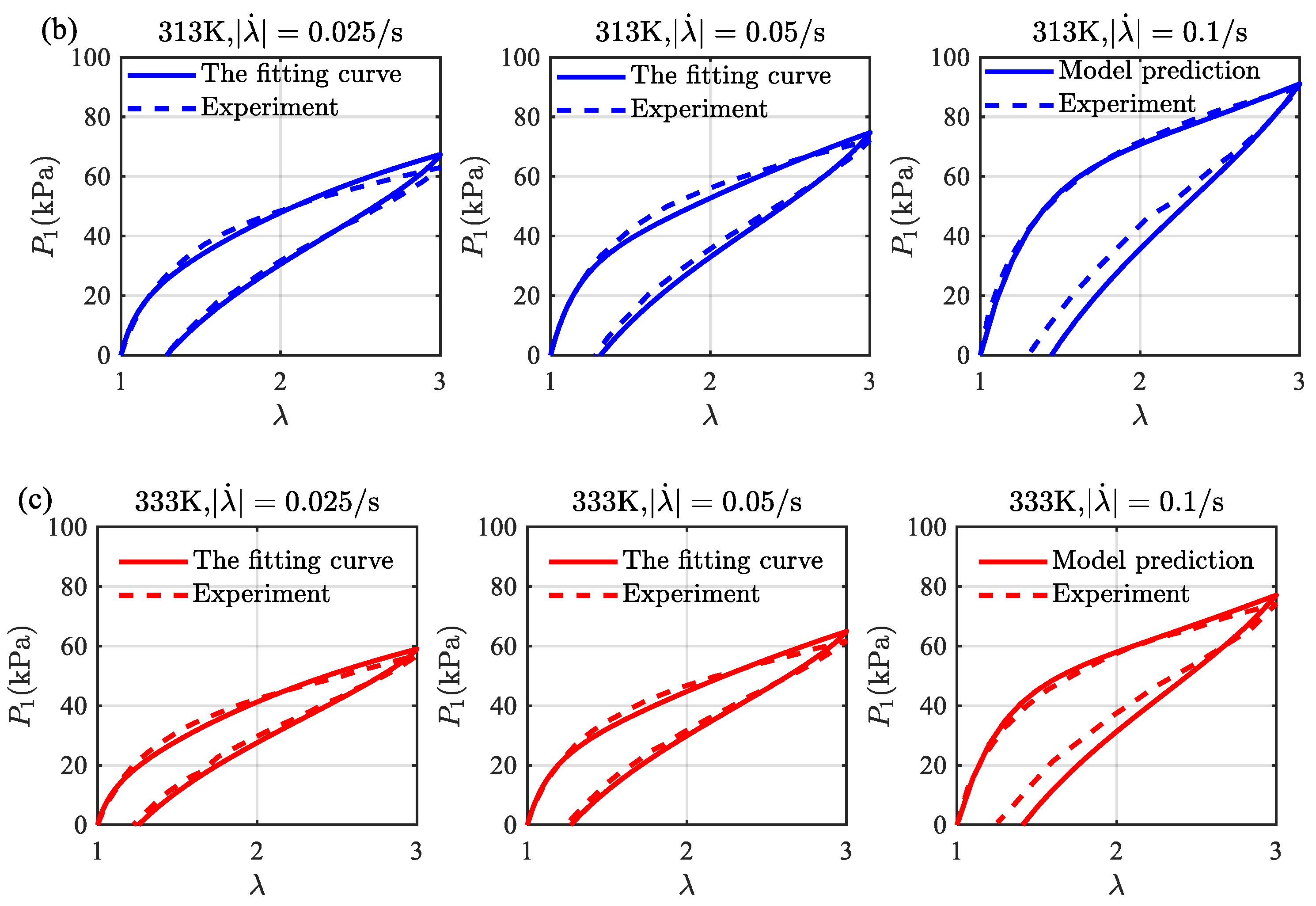
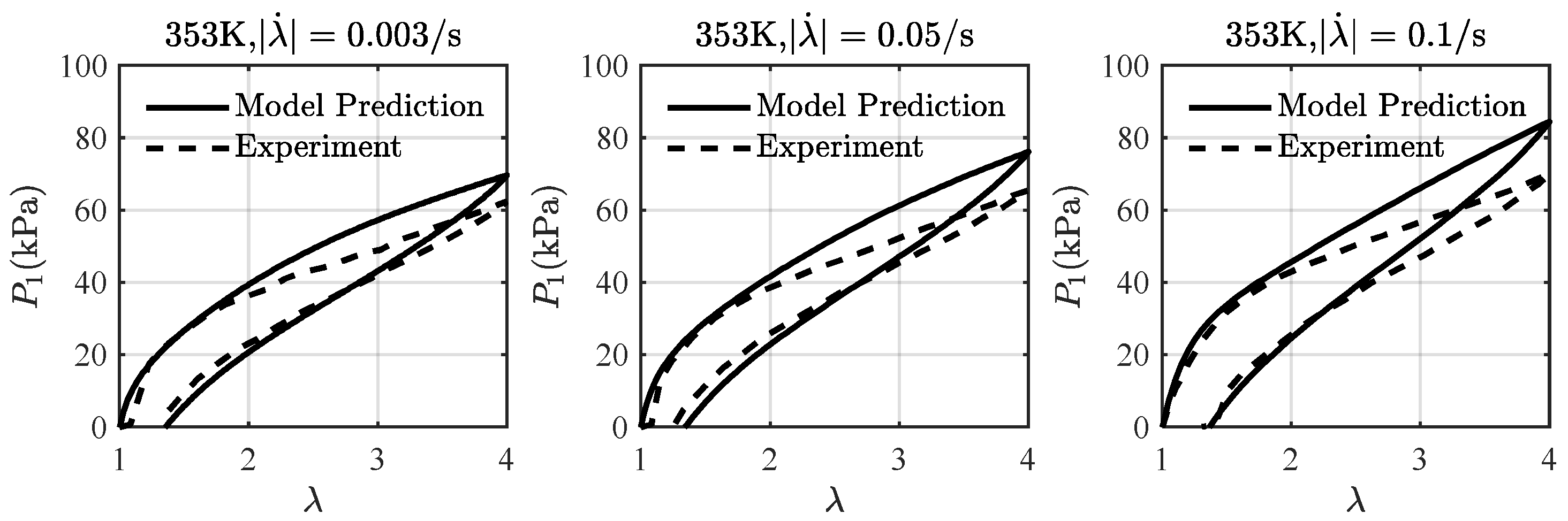
3.2. Thermo-Viscoelastic Coupling
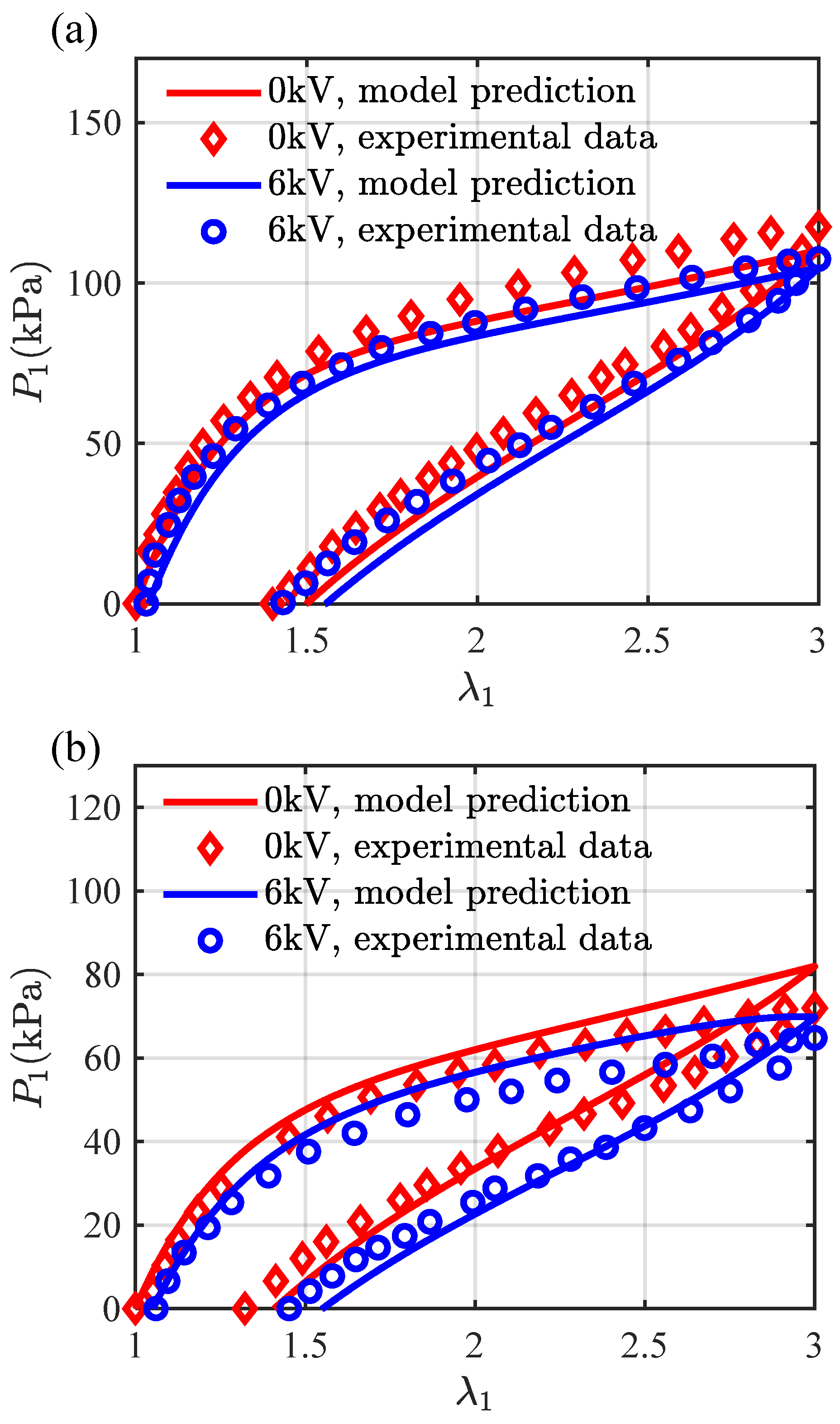
3.3. Thermo-Electro-Viscoelastic Coupling
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Romasanta, L.J.; Lopez-Manchado, M.A.; Verdejo, R. Increasing the performance of dielectric elastomer actuators: A review from the materials perspective. Prog. Polym. Sci. 2015, 51, 188–211. [Google Scholar] [CrossRef]
- Shi, Y.; Askounis, E.; Plamthottam, R.; Libby, T.; Peng, Z.; Youssef, K.; Pu, J.; Pelrine, R.; Pei, Q. A processable, high-performance dielectric elastomer and multilayering process. Science 2022, 377, 228–232. [Google Scholar] [CrossRef]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef]
- Qiu, Y.; Zhang, E.; Plamthottam, R.; Pei, Q. Dielectric elastomer artificial muscle: Materials innovations and device explorations. Acc. Chem. Res. 2019, 52, 316–325. [Google Scholar] [CrossRef]
- Chuc, N.H.; Vuong, N.H.L.; Kim, D.; Moon, H.; Koo, J.C.; Lee, Y.; Nam, J.-d.; Choi, H.R. Design and control of a multi-jointed robot finger driven by an artificial muscle actuator. Adv. Robot. 2012, 24, 1983–2003. [Google Scholar] [CrossRef]
- Lin, G.J.; Zhang, X.B.; Song, D.C. Wind power micro-generator using dielectric electric active polymer. Adv. Mater. Res. 2011, 328–330, 1491–1494. [Google Scholar] [CrossRef]
- Moretti, G.; Papini, G.P.R.; Righi, M.; Forehand, D.; Ingram, D.; Vertechy, R.; Fontana, M. Resonant wave energy harvester based on dielectric elastomer generator. Smart Mater. Sruct. 2018, 27, 035015. [Google Scholar] [CrossRef]
- Rosset, S.; Shea, H.R. Flexible and stretchable electrodes for dielectric elastomer actuators. Appl. Phys. A 2012, 110, 281–307. [Google Scholar] [CrossRef]
- Marette, A.; Poulin, A.; Besse, N.; Rosset, S.; Briand, D.; Shea, H. Flexible zinc-tin oxide thin film transistors operating at 1 kV for integrated switching of dielectric elastomer actuators arrays. Adv. Mater. 2017, 29, 1700880. [Google Scholar] [CrossRef]
- Suo, Z. Theory of dielectric elastomers. Acta Mech. Solida Sin. 2010, 23, 549–578. [Google Scholar] [CrossRef]
- Khurana, A.; Joglekar, M.M.; Zurlo, G. Electromechanical stability of wrinkled dielectric elastomers. Int. J. Solids Struct. 2022, 246–247, 111613. [Google Scholar] [CrossRef]
- Ghosh, A.; Basu, S. Soft dielectric elastomer tubes in an electric field. J. Mech. Phys. Solids 2021, 150, 104371. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, L.; Liu, Y.; Leng, J. Thermoelectromechanical instability of dielectric elastomer undergoes polarization saturation and temperature variation. Acta Mech. Sin. 2021, 37, 414–421. [Google Scholar] [CrossRef]
- Sheng, J.; Chen, H.; Li, B. Effect of temperature on the stability of dielectric elastomers. J. Phys. D Appl. Phys. 2011, 44, 365406. [Google Scholar] [CrossRef]
- Plante, J.-S.; Dubowsky, S. Large-scale failure modes of dielectric elastomer actuators. Int. J. Solids Struct. 2006, 43, 7727–7751. [Google Scholar] [CrossRef]
- Diaconu, I.; Dorohoi, D.-O.; Ciobanu, C. Electromechanical response of polyurethane films with different thickness. Rom. J. Phys. 2008, 53, 91–97. [Google Scholar]
- Hossain, M.; Vu, D.K.; Steinmann, P. A comprehensive characterization of the electro-mechanically coupled properties of VHB 4910 polymer. Arch. Appl. Mech. 2014, 85, 523–537. [Google Scholar] [CrossRef]
- Hossain, M.; Vu, D.K.; Steinmann, P. Experimental study and numerical modelling of VHB 4910 polymer. Comp. Mater. Sci. 2012, 59, 65–74. [Google Scholar] [CrossRef]
- Liao, Z.; Hossain, M.; Yao, X.; Mehnert, M.; Steinmann, P. On thermo-viscoelastic experimental characterization and numerical modelling of VHB polymer. Int. J. Non-Linear Mech. 2020, 118, 103263. [Google Scholar] [CrossRef]
- Mehnert, M.; Hossain, M.; Steinmann, P. A complete thermo–electro–viscoelastic characterization of dielectric elastomers, Part I: Experimental investigations. J. Mech. Phys. Solids 2021, 157, 104603. [Google Scholar] [CrossRef]
- Hong, W. Modeling viscoelastic dielectrics. J. Mech. Phys. Solids 2011, 59, 637–650. [Google Scholar] [CrossRef]
- Behera, S.K.; Kumar, D.; Sarangi, S. Modeling of electro–viscoelastic dielectric elastomer: A continuum mechanics approach. Eur. J. Mech. A/Solids 2021, 90, 104369. [Google Scholar] [CrossRef]
- Chen, Y.; Kang, G.; Yuan, J.; Hu, Y.; Li, T.; Qu, S. An electro-mechanically coupled visco-hyperelastic-plastic constitutive model for cyclic deformation of dielectric elastomers. Mech. Mater. 2020, 150, 103575. [Google Scholar] [CrossRef]
- Zhou, J.; Jiang, L.; Khayat, R.E. A micro–macro constitutive model for finite-deformation viscoelasticity of elastomers with nonlinear viscosity. J. Mech. Phys. Solids 2018, 110, 137–154. [Google Scholar] [CrossRef]
- Mehnert, M.; Hossain, M.; Steinmann, P. Experimental and numerical investigations of the electro-viscoelastic behavior of VHB 4905TM. Eur. J. Mech. A. Solids 2019, 77, 103797. [Google Scholar] [CrossRef]
- Alkhoury, K.; Bosnjak, N.; Wang, Y.; Lee, H.; Nadimpalli, S.; Chester, S.A. Experiments and modeling of the thermo-mechanically coupled behavior of VHB. Int. J. Solids Struct. 2022, 242, 111523. [Google Scholar] [CrossRef]
- Mehnert, M.; Hossain, M.; Steinmann, P. A complete thermo-electro-viscoelastic characterization of dielectric elastomers, Part II: Continuum modeling approach. J. Mech. Phys. Solids 2021, 157, 104625. [Google Scholar] [CrossRef]
- Gent, A.N. A new constitutive relation for rubber. Rubbery Chem. Technol. 1996, 69, 59–61. [Google Scholar] [CrossRef]
- Banks, H.T.; Hu, S.; Kenz, Z.R. A brief review of elasticity and viscoelasticity for solids. Adv. Appl. Math. Mech. 2015, 3, 1–51. [Google Scholar] [CrossRef]
- Reese, S.; Govindjee, S. A theory of finite viscoelasticity and numerical aspects. Int. J. Solids Struct. 1998, 35, 3455–3482. [Google Scholar] [CrossRef]
- Su, X.; Peng, X. A 3D finite strain viscoelastic constitutive model for thermally induced shape memory polymers based on energy decomposition. Int. J. Plast. 2018, 110, 166–182. [Google Scholar] [CrossRef]
- Qin, B.; Zhong, Z.; Zhang, T.-Y. A thermodynamically consistent model for chemically induced viscoelasticity in covalent adaptive network polymers. Int. J. Solids Struct. 2022, 256, 111953. [Google Scholar] [CrossRef]
- Mehnert, M.; Steinmann, P. On the influence of the compliant electrodes on the mechanical behavior of VHB 4905. Comp. Mater. Sci. 2019, 160, 287–294. [Google Scholar] [CrossRef]
- Arruda, E.M.; Boyci, M.C. A three-dimensional constitutive model for the large stretch behaviour of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef]
- Ganser, M.; Hildebrand, F.E.; Kamlah, M.; McMeeking, R.M. A finite strain electro-chemo-mechanical theory for ion transport with application to binary solid electrolytes. J. Mech. Phys. Solids 2019, 125, 681–713. [Google Scholar] [CrossRef]
- N’Guyen, T.A.; Lejeunes, S.; Eyheramendy, D.; Boukamel, A. A thermodynamical framework for the thermo-chemo-mechanical couplings in soft materials at finite strain. Mech. Mater. 2016, 95, 158–171. [Google Scholar] [CrossRef]
- Dippel, B.; Johlitz, M.; Lion, A. Thermo-mechanical couplings in elastomers—Experiments and modelling. ZAMM J. Appl. Math. Mech. 2015, 95, 1117–1128. [Google Scholar] [CrossRef]
- Kollosche, M.; Kofod, G.; Suo, Z.; Zhu, J. Temporal evolution and instability in a viscoelastic dielectric elastomer. J. Mech. Phys. Solids 2015, 76, 47–64. [Google Scholar] [CrossRef]
- Shangguan, Y.; Chen, F.; Jia, E.; Lin, Y.; Hu, J.; Zheng, Q. New insight into time-temperature correlation for polymer relaxations ranging from secondary relaxation to terminal flow: Application of a universal and developed WLF equation. Polymers 2017, 9, 567. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| 273 K | 296 K | 313 K | 333 K | 353 K | |
|---|---|---|---|---|---|
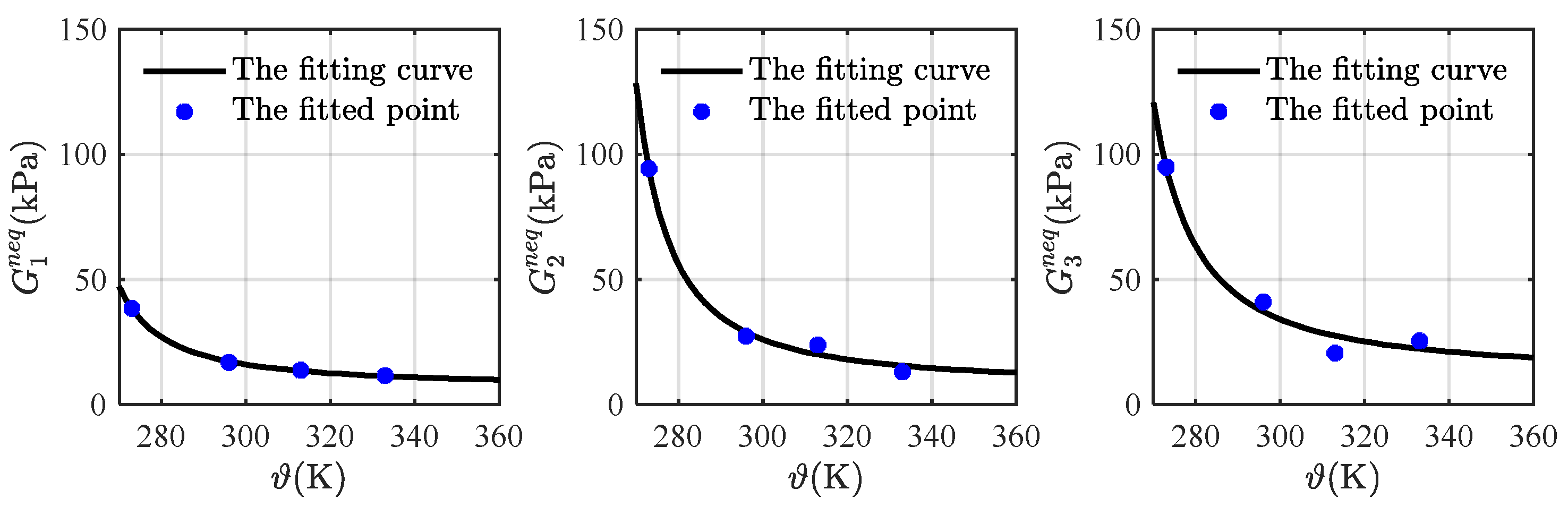
| 23.44 | 15.12 | 13.05 | 11.82 | 11.07 | |
| 38.44 | 16.83 | 13.72 | 11.55 | 10.20 | |
| 94.23 | 27.39 | 23.90 | 13.11 | 13.29 | |
| 94.96 | 41.04 | 20.57 | 25.41 | 19.49 | |
| 413.32 | 413.32 | 413.32 | 413.32 | 413.32 | |
| 5.43 | 5.43 | 5.43 | 5.43 | 5.43 | |
| 1.65 | 1.65 | 1.65 | 1.65 | 1.65 | |
| 155 | 155 | 155 | 155 | 155 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, B.; Zhong, Z.; Zhang, T.-Y. A Thermo-Electro-Viscoelastic Model for Dielectric Elastomers. Materials 2023, 16, 5917. https://doi.org/10.3390/ma16175917
Qin B, Zhong Z, Zhang T-Y. A Thermo-Electro-Viscoelastic Model for Dielectric Elastomers. Materials. 2023; 16(17):5917. https://doi.org/10.3390/ma16175917
Chicago/Turabian StyleQin, Bao, Zheng Zhong, and Tong-Yi Zhang. 2023. "A Thermo-Electro-Viscoelastic Model for Dielectric Elastomers" Materials 16, no. 17: 5917. https://doi.org/10.3390/ma16175917
APA StyleQin, B., Zhong, Z., & Zhang, T. -Y. (2023). A Thermo-Electro-Viscoelastic Model for Dielectric Elastomers. Materials, 16(17), 5917. https://doi.org/10.3390/ma16175917