

A Detailed Numerical Model for a New Composite Slim-Floor Slab System


Abstract
:1. Introduction
1.1. Literature Review
1.2. Research Significance
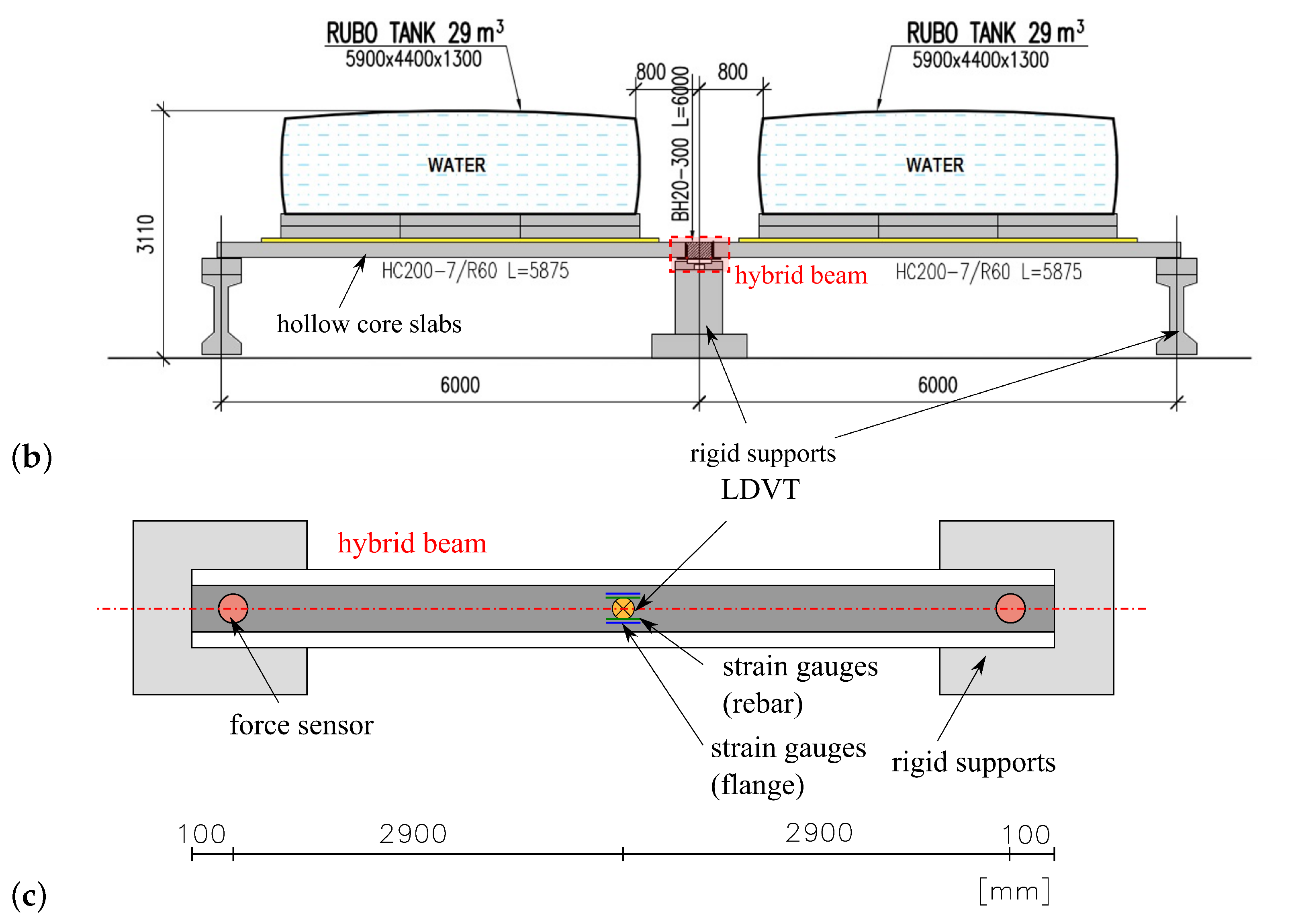
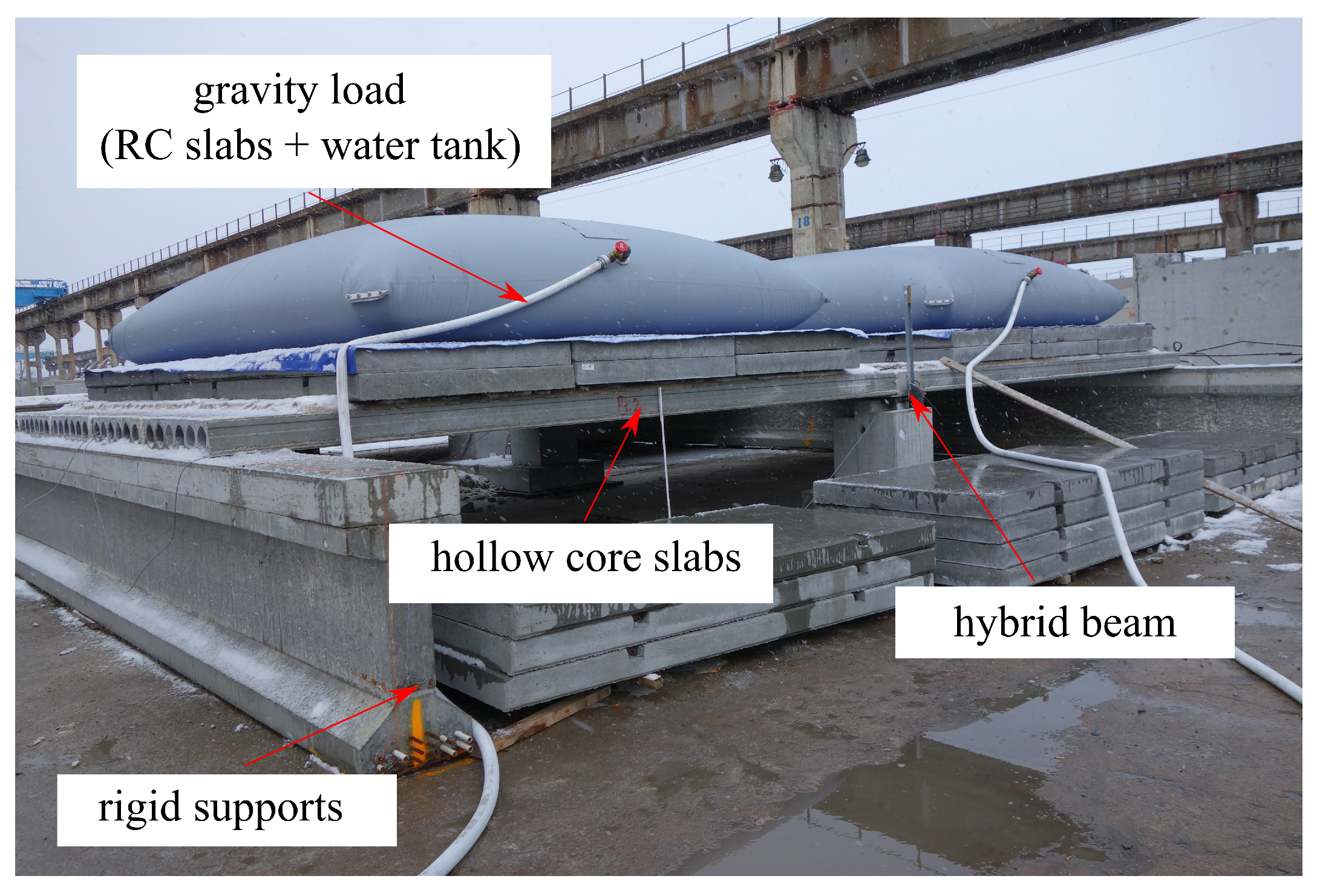
2. Field Experimental Tests
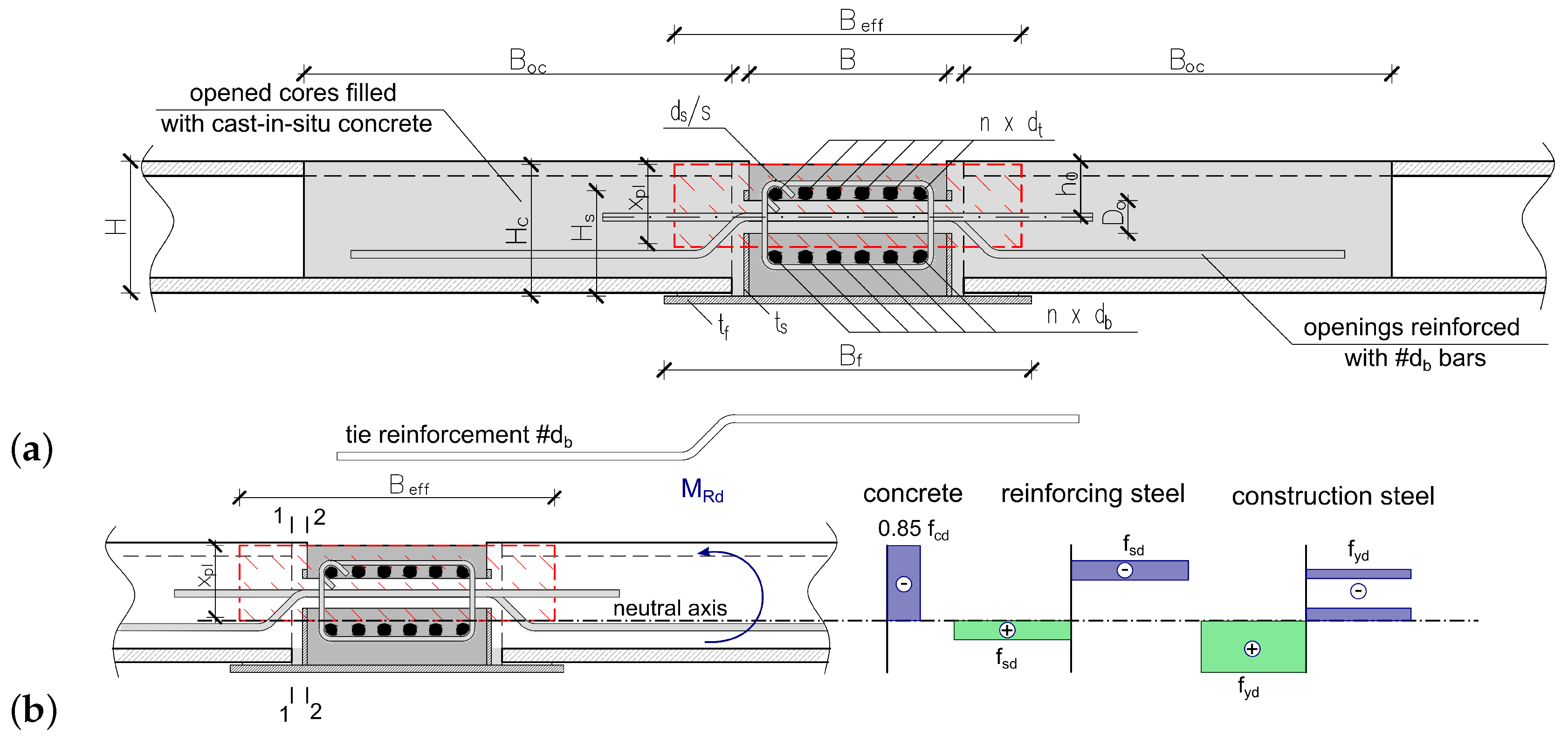
3. Analytical Calculations of the Structural System Load Capacity
- —the compressive forces carried out by the effective compressive zone of the effective cross-section of the floor slabs interacting with the composite beam;
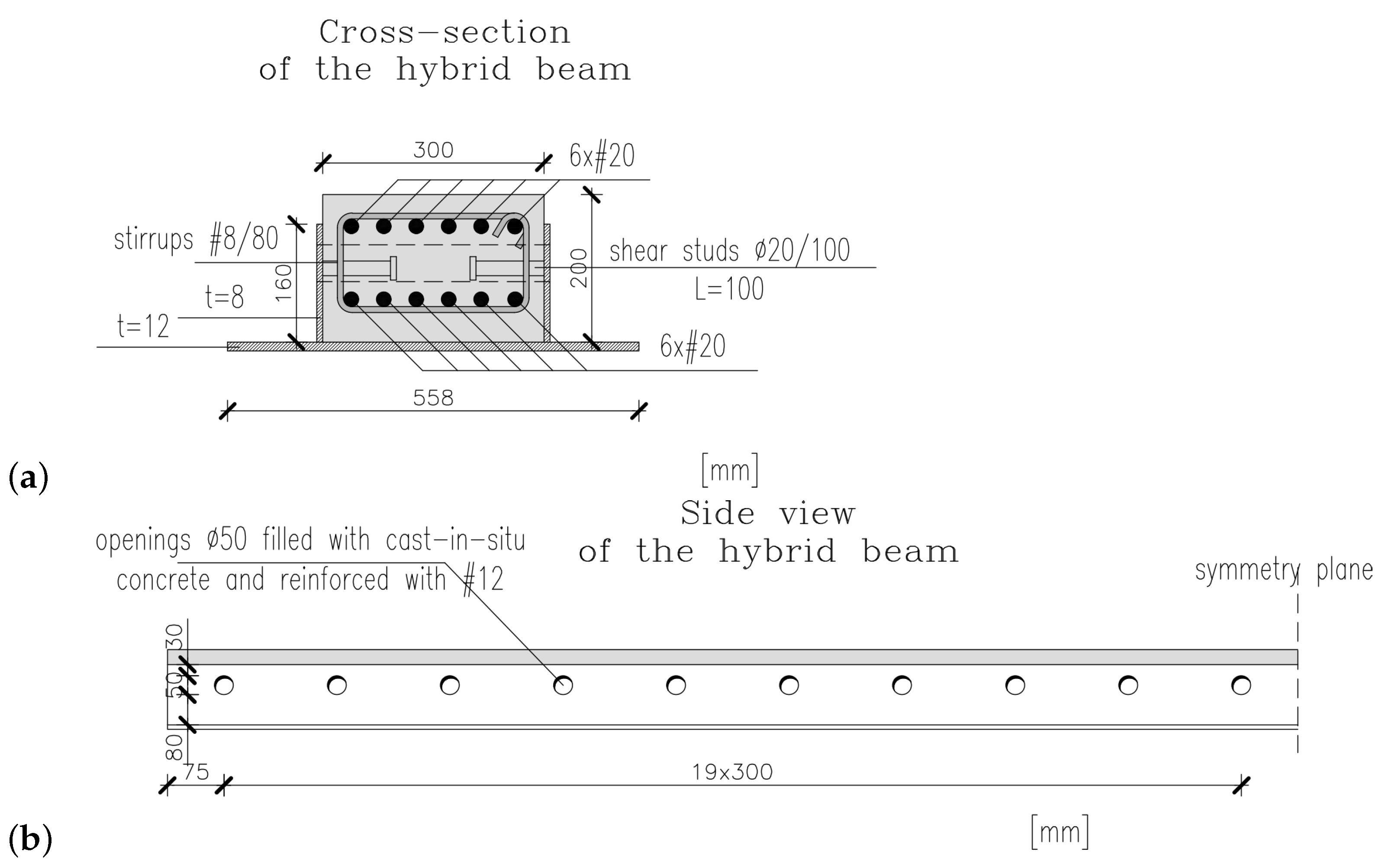
- B—the width of RC core, cf. Figure 6;
- (according to EN 1994-1-1 [30]);
- —the characteristic compressive strength of the composite beam’s concrete;
- —the partial safety factor for concrete.
- The clamping force transmitted through the indented construction joint with notches () is calculated as follows:where—the longitudinal shear stress.—effective number, depth and width of indentations, respectively, .After substitution MPa (assuming fillet concrete C20/25), m, mm, one obtains kN.
- The force transmitted by the RC dowels ()where—number of RC dowels per length;—the longitudinal shear stress;—the web opening area inside view ( 50 mm);—the reinforcement area in the opening ( 12 mm);—the yield strength of the joint stitching reinforcement;—the partial safety factor for steel.After substitution MPa, MPa, , , , , one obtains kN.
- The cohesive forces in the contact zone of the slab with the beam in the lower part of the beam (), determined in accordance with point 6.2.5 of Eurocode 2: EN 1992-1-1 [31]. The standard coefficients c and are determined according to the requirements of EN 1992-1-1 [31], clause 6.2.5(2), allowing for the surfaces classified as very smooth, smooth, etc., as shown in the following examples:
- -
- Very smooth: obtained in steel, plastic or specially prepared wooden moulds; and ;
- -
- Smooth: obtained in slip forms or as extruded or untreated surface (after vibration); and .
However, it was found that the actual surface conditions of the steel webs in the composite beams neither correspond to the case of a smooth or very smooth surface, so it was assumed that the intermediate conditions take place, assuming the values of the coefficients: and . On this basis, the force in the contact zone between the steel web and the infill concrete was determined:wherex—the depth of the compression zone of the lateral cross-section;—the cross-sectional area of the joint stitching reinforcement spaced along the axes of the side openings in the beam;—the effective depth, see Figure 6a. - The friction force due to the action of compressive stresses caused by the contact force on the joint surface, equivalent to the tensile force in the joint stitching reinforcement (), can be determined from the following formula:where—the effective cross-sectional area of the joint stitching reinforcement;—number of RC dowels per length.Assuming as above , , , MPa, , one obtains kN.
4. Numerical Analysis
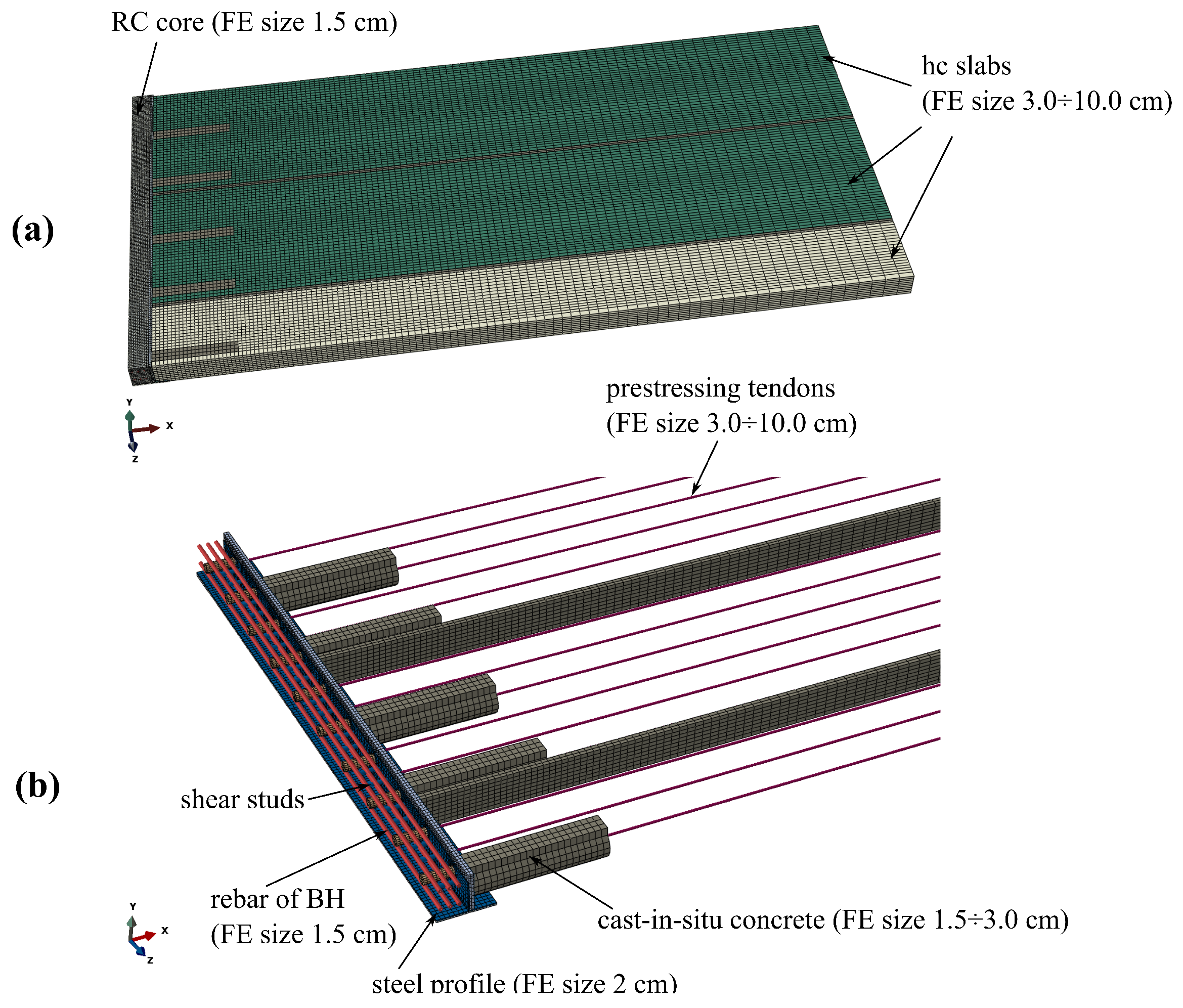
4.1. Description of Numerical Model
- RC core of the hybrid beam—eight-noded continuum elements with selective integration with a default dimension of 1.5 cm—C3D8;
- Steel profile of the hybrid beam—four-noded shell elements with reduced integration with a default dimension of 2 cm—S4R;
- Shear studs—beam elements of moderate thickness and linear approximation of displacement field with a default dimension of 1.5 cm—B31;
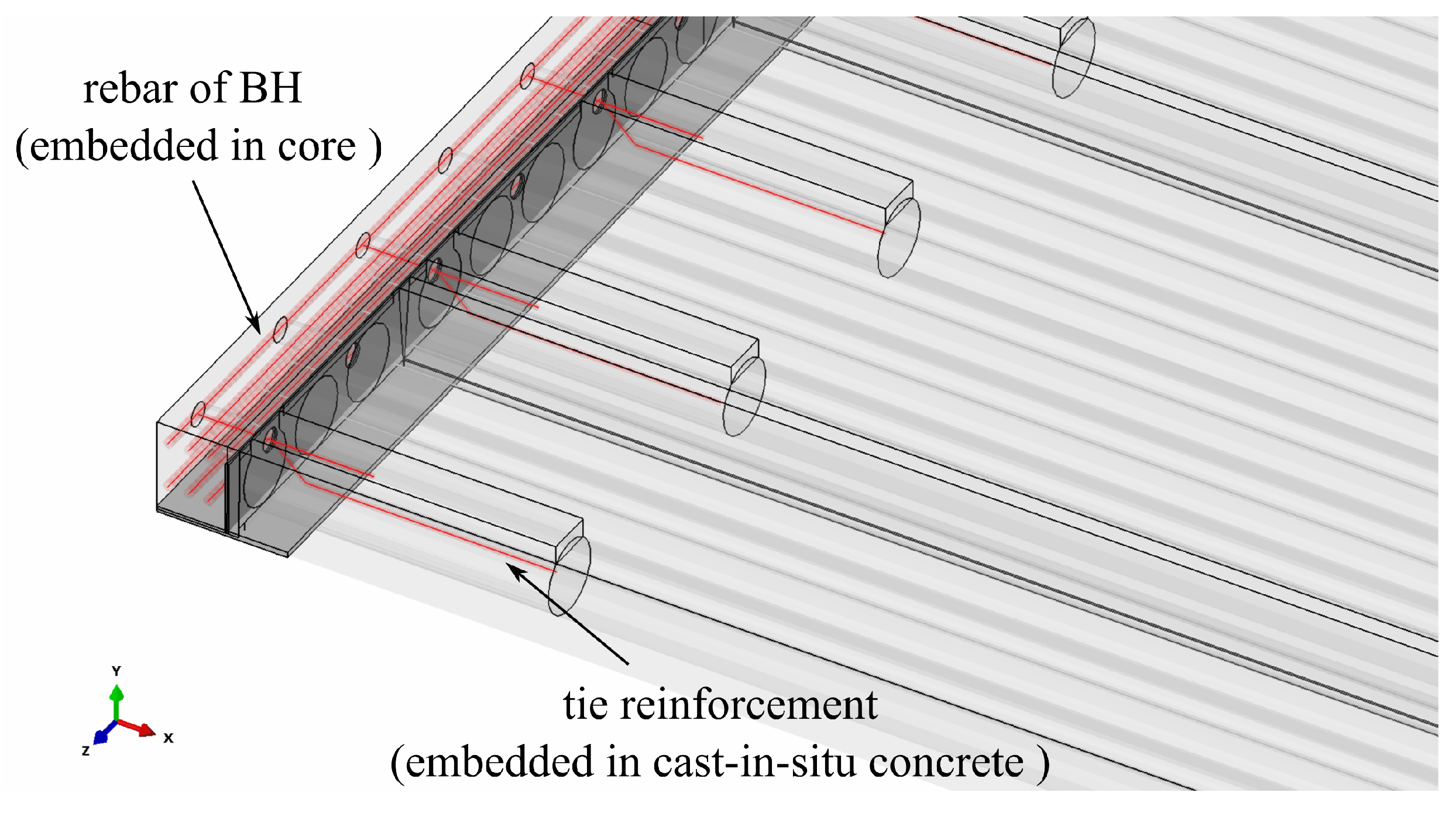
- Rebar—two-noded truss elements with dimension adjusted to surrounding medium—T3D2,
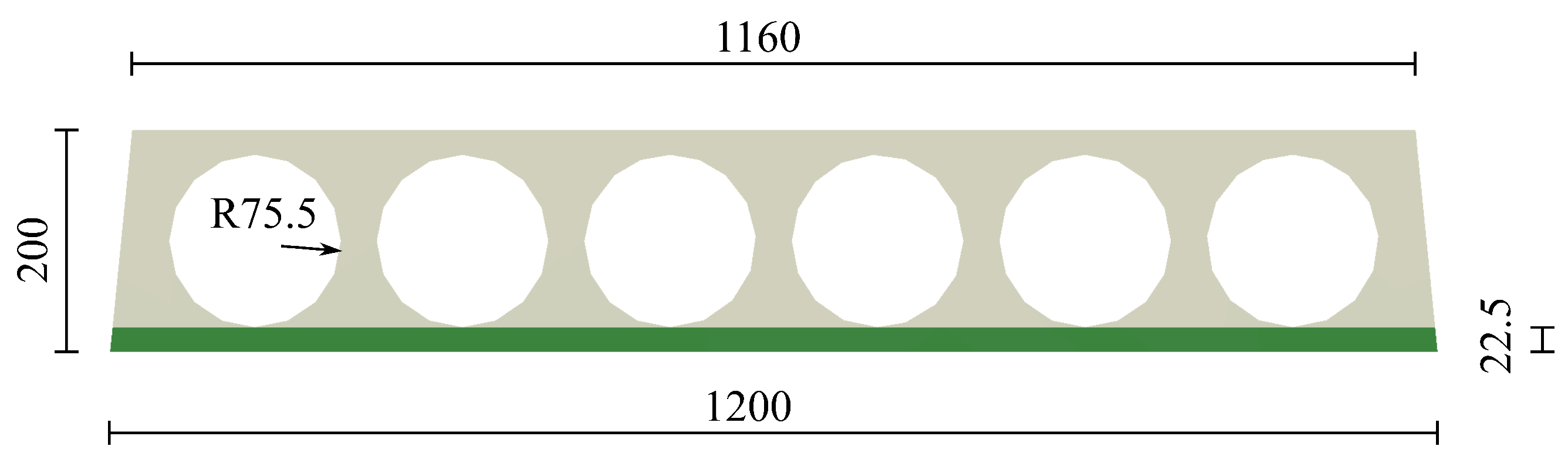
- Hollow core slabs—six-noded wedge continuum elements with a default dimension of 3 cm—C3D6;
- Concrete filling—eight-noded continuum elements with selective integration with a default dimension of 1.5–3.0 cm—C3D8;
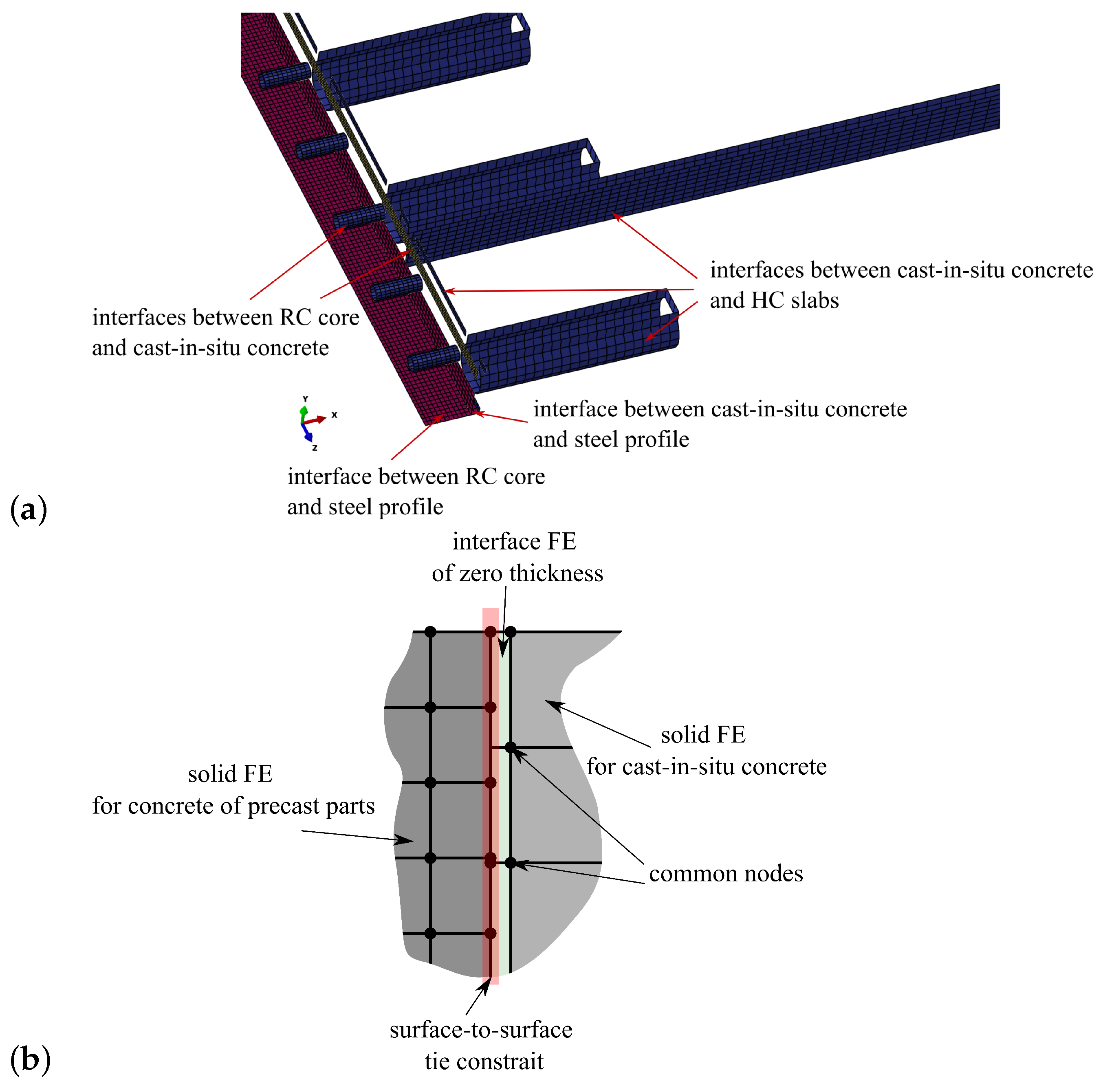
- Interfaces between different parts of the model—eight-noded cohesive elements—COH3D8.
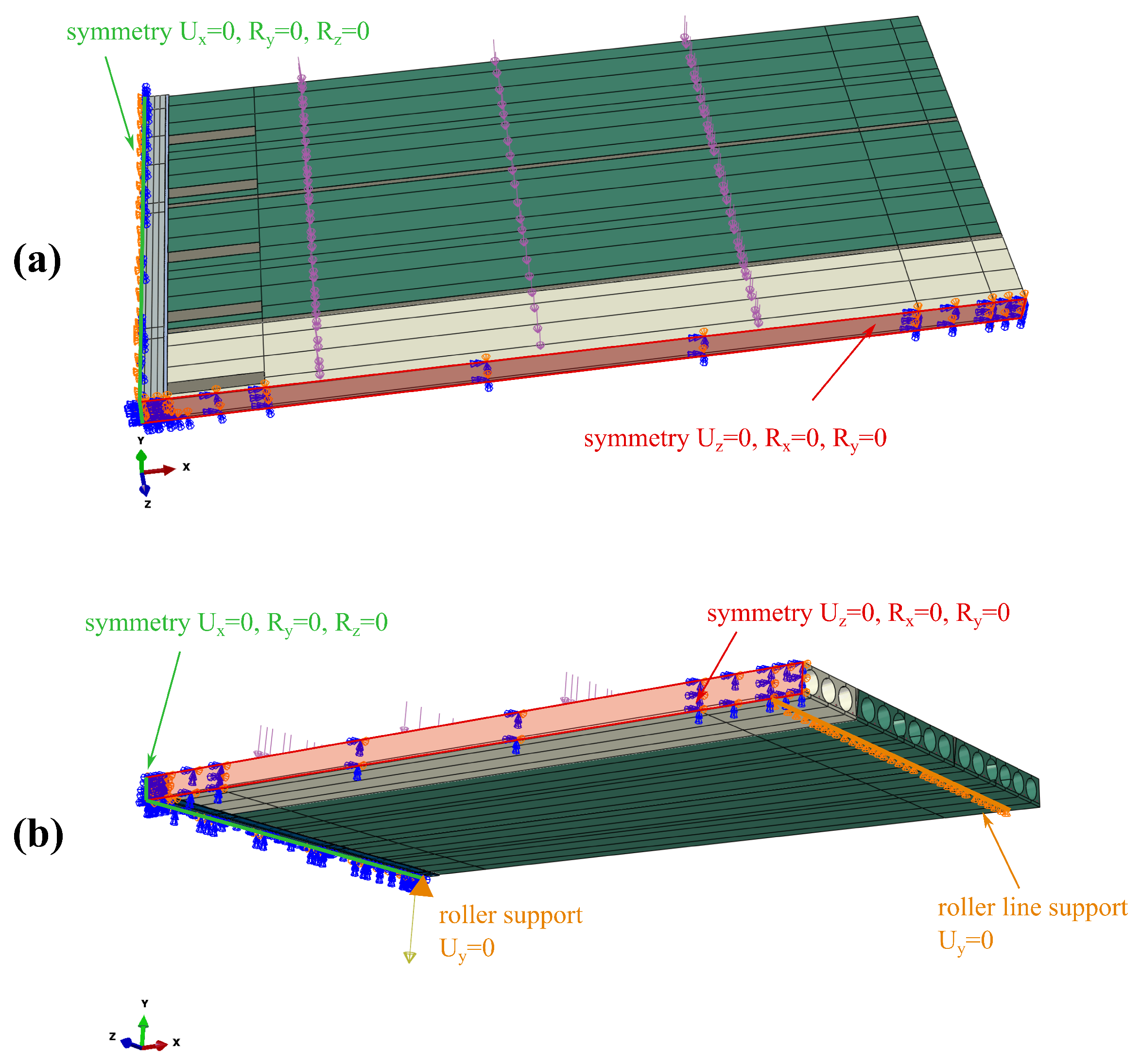
- The first one—a gravity load;
- The second one—a pressure to the surfaces, on which the RC plates and the water tanks were placed during the tests.
4.2. Constitutive Models and Their Parameters
- —the equivalent plastic strains in tension and compression, respectively;
- —the coefficient depending on the ratio of the initial yield strength in uni- and biaxial compressive stress states;
- —the hydrostatic stress,
- —the Huber–Mises equivalent stress (—components of the stress deviator);
- —the function;
- —Macauley’s brackets, i.e., operation, which for negative variables return 0, and for positive ones, their values;
- —the value of the maximal principal stress;
- , —hardening/softening functions for compressive and tensile stress states, respectively;
- —the function which controls the shape of the deviatoric section.
- —values of principal stresses;
- —the effective stress domain function assessing “the stress state triaxiality”;
- , —the greatest and the smallest eigenvalues of the plastic strain rate tensor.
- —the tractions vector; indices n, s, and t refer to the normal, first, and second tangential direction, respectively;
- , , —the stiffness of interface material in three directions;
- , , —interface nominal strains;
- —the initial thickness of the interface;
- , , —separations (displacement jumps at an interface) in three directions.
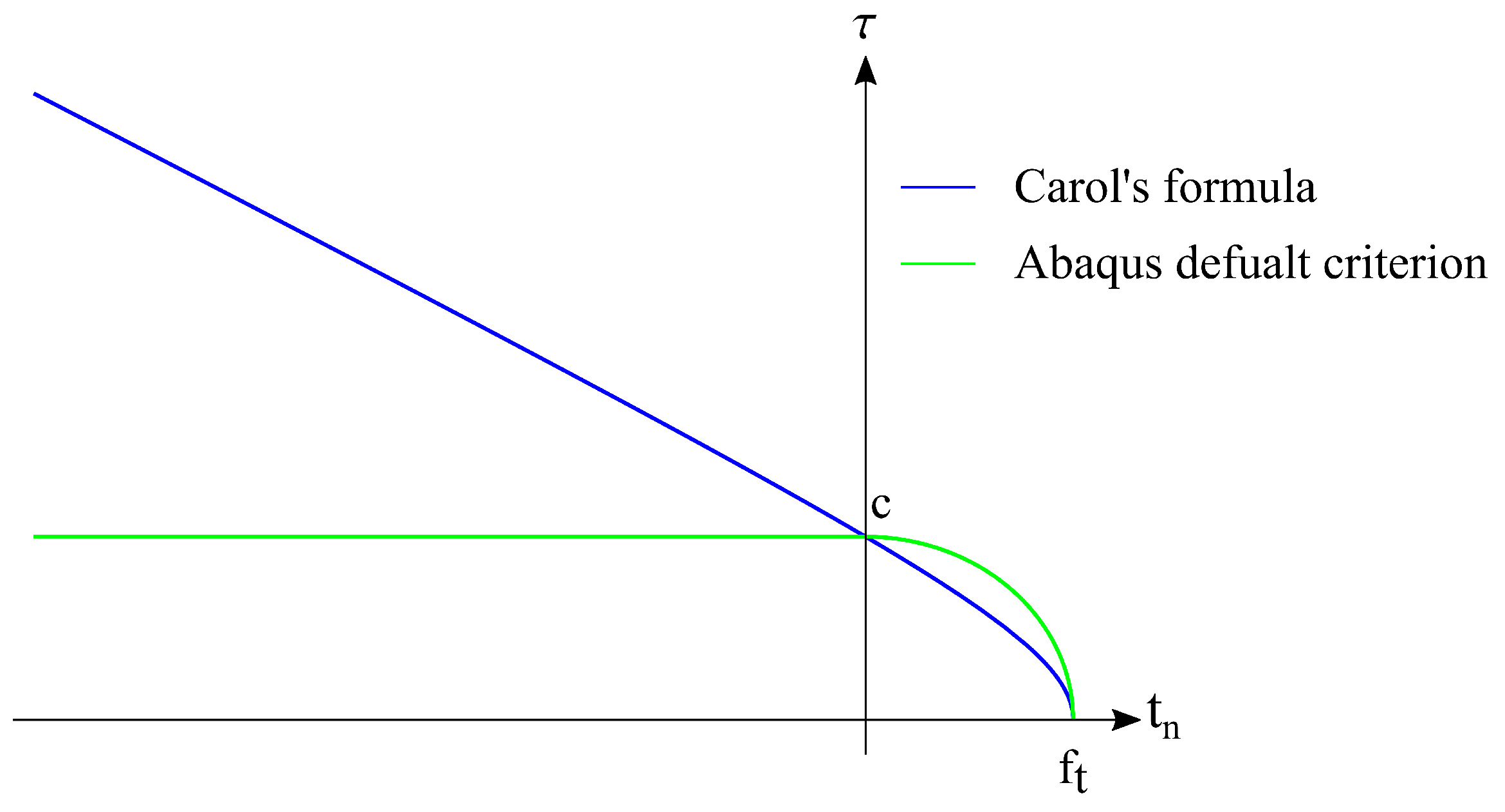
- —the tensile strength of the interface;
- c, —the cohesion and the friction angel, respectively;
- —the shear strength.
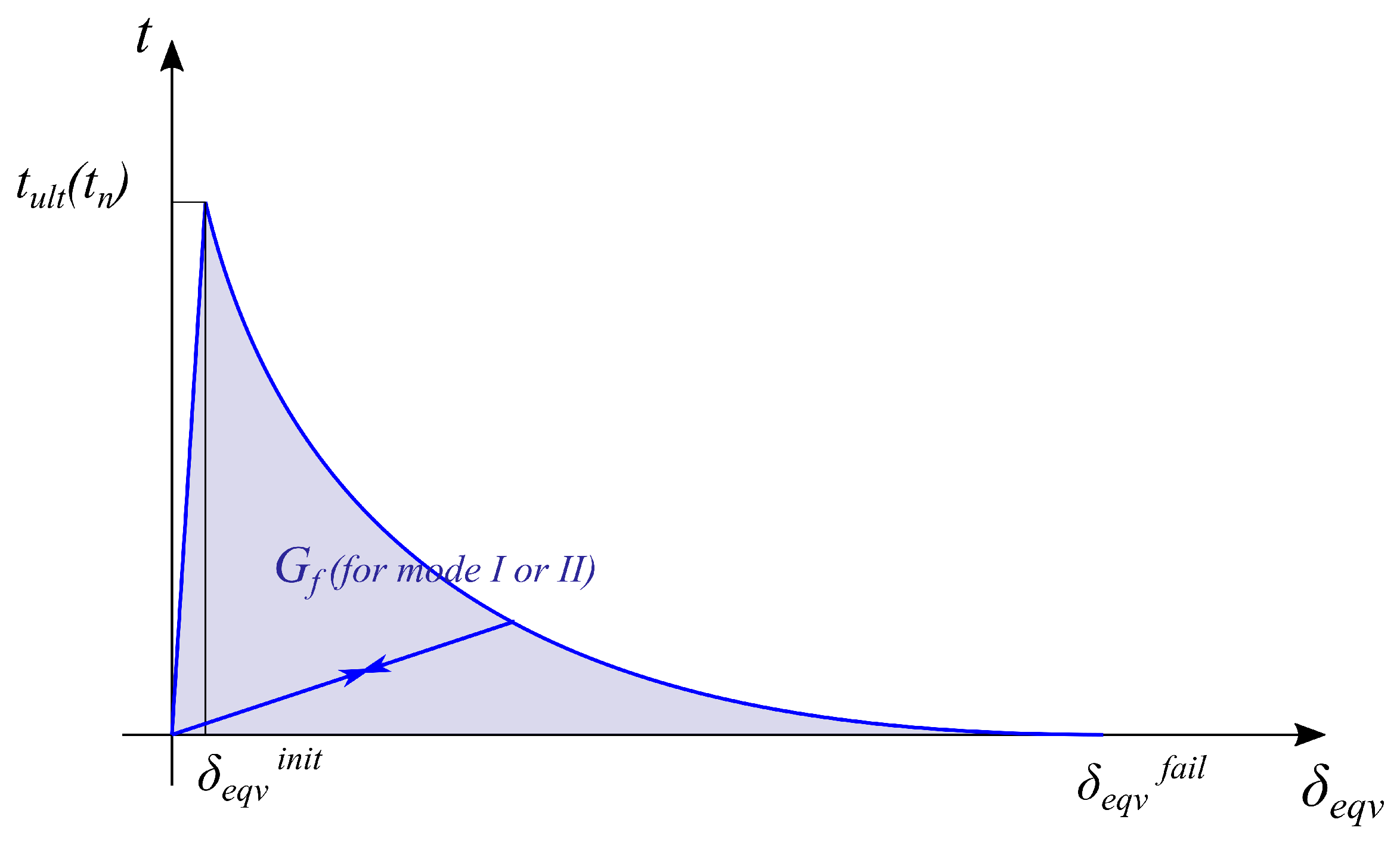
- —the maximum effective separation during the loading history;
- —the effective separation at the damage initiation;
- —the effective separation at complete failure;
- —the parameter which controls the rate of softening (typical value is around 7 cf. [28]).
- The behaviour of the model, i.e., tractions—equivalent separations, are presented in Figure 15.
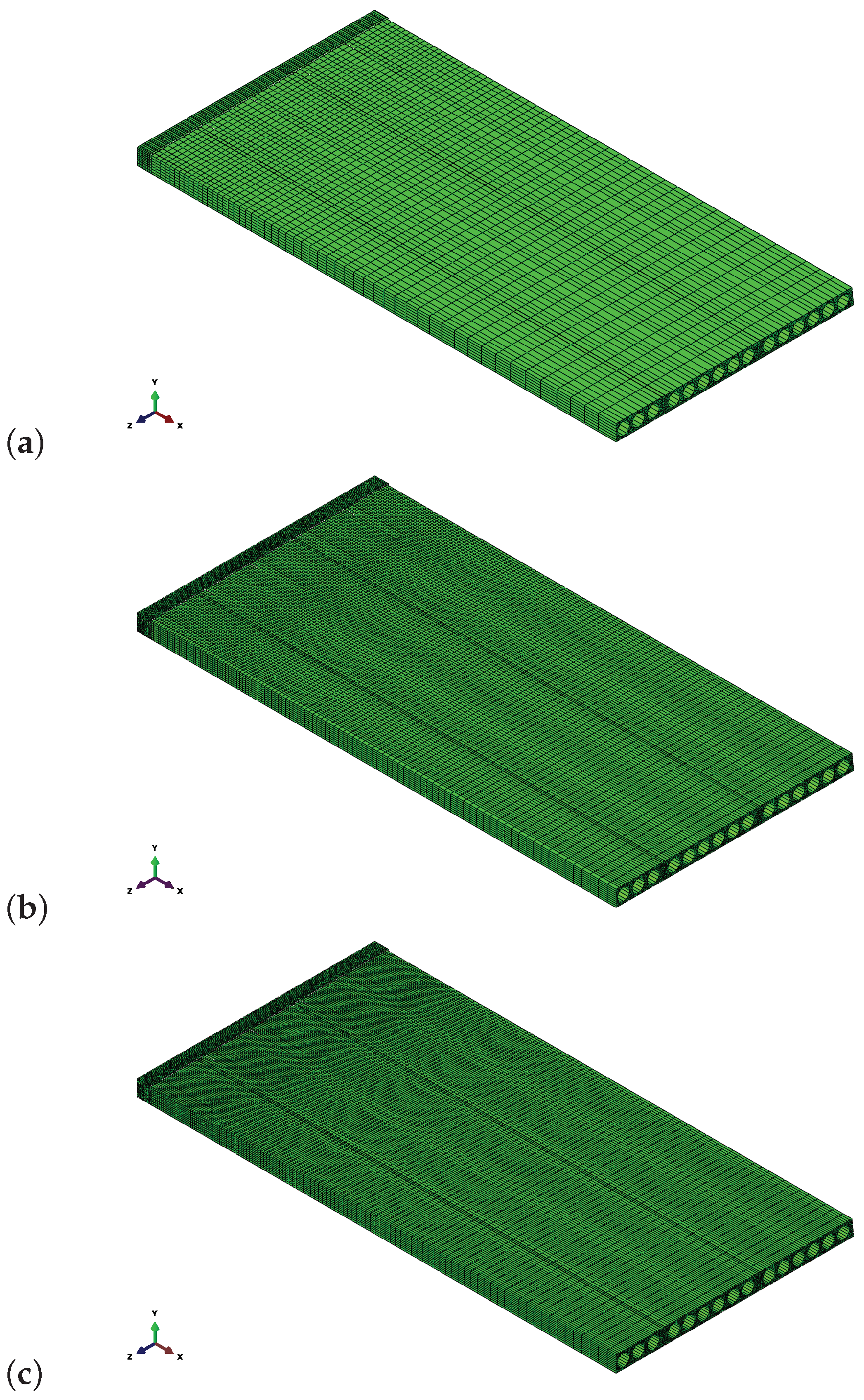
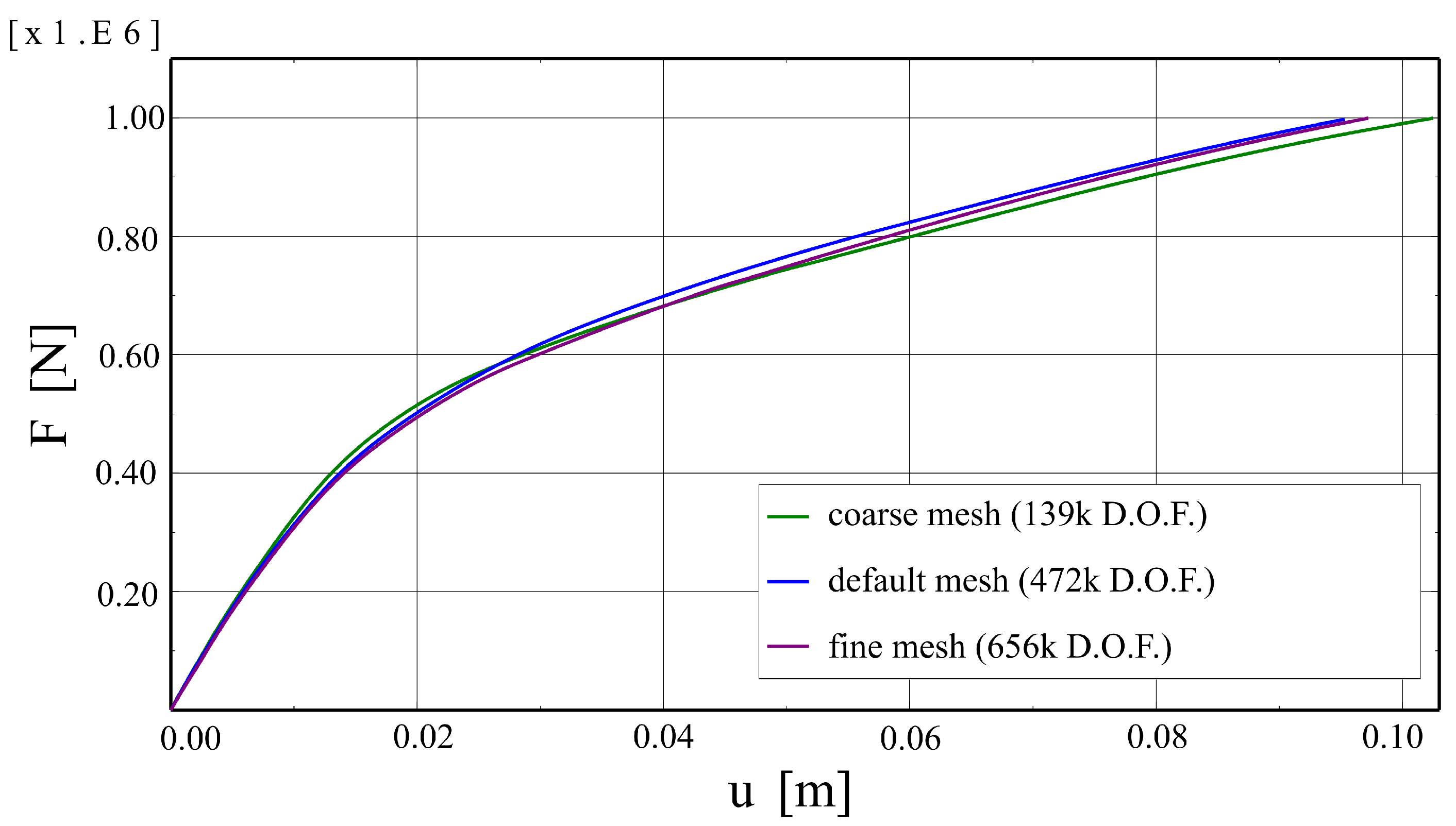
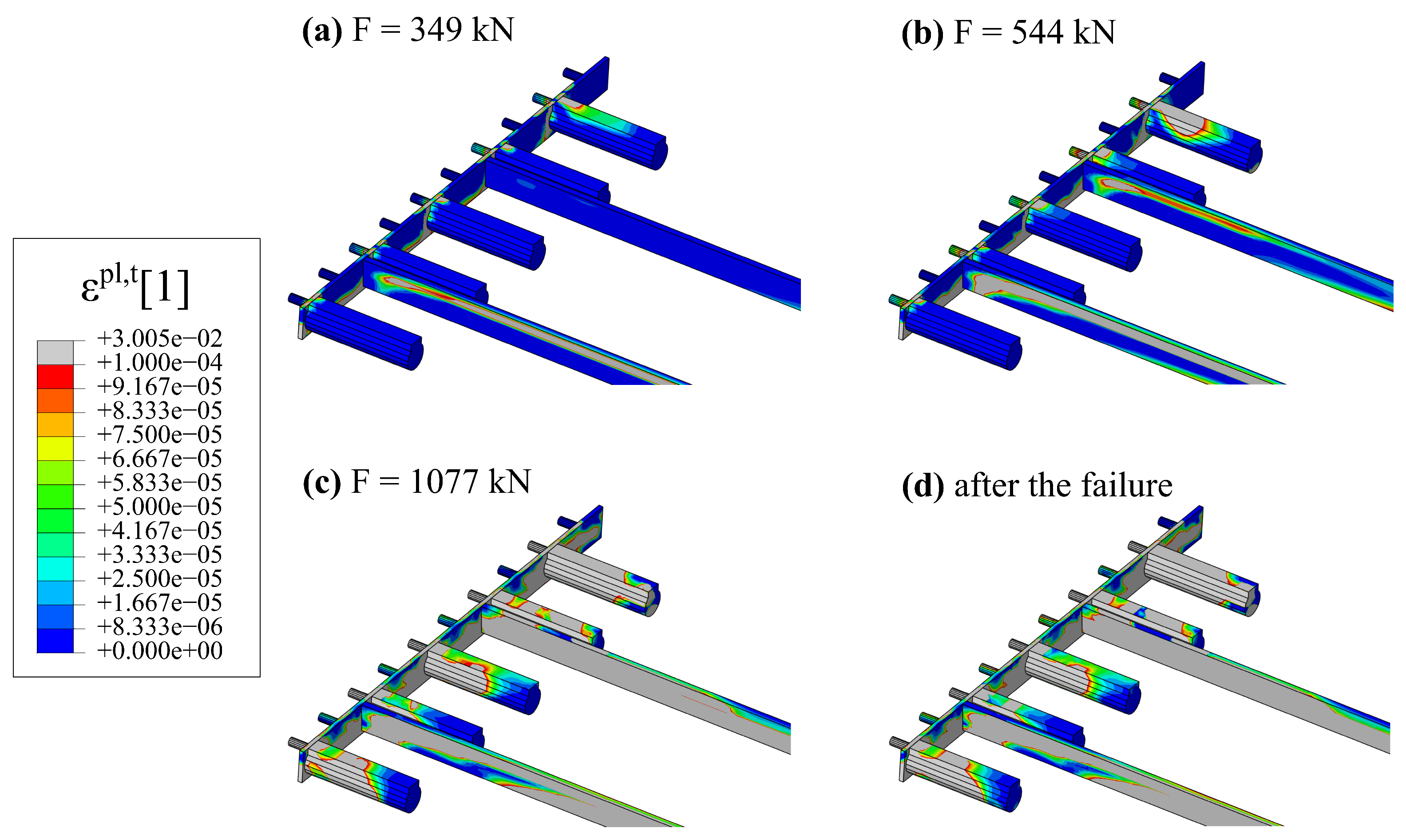
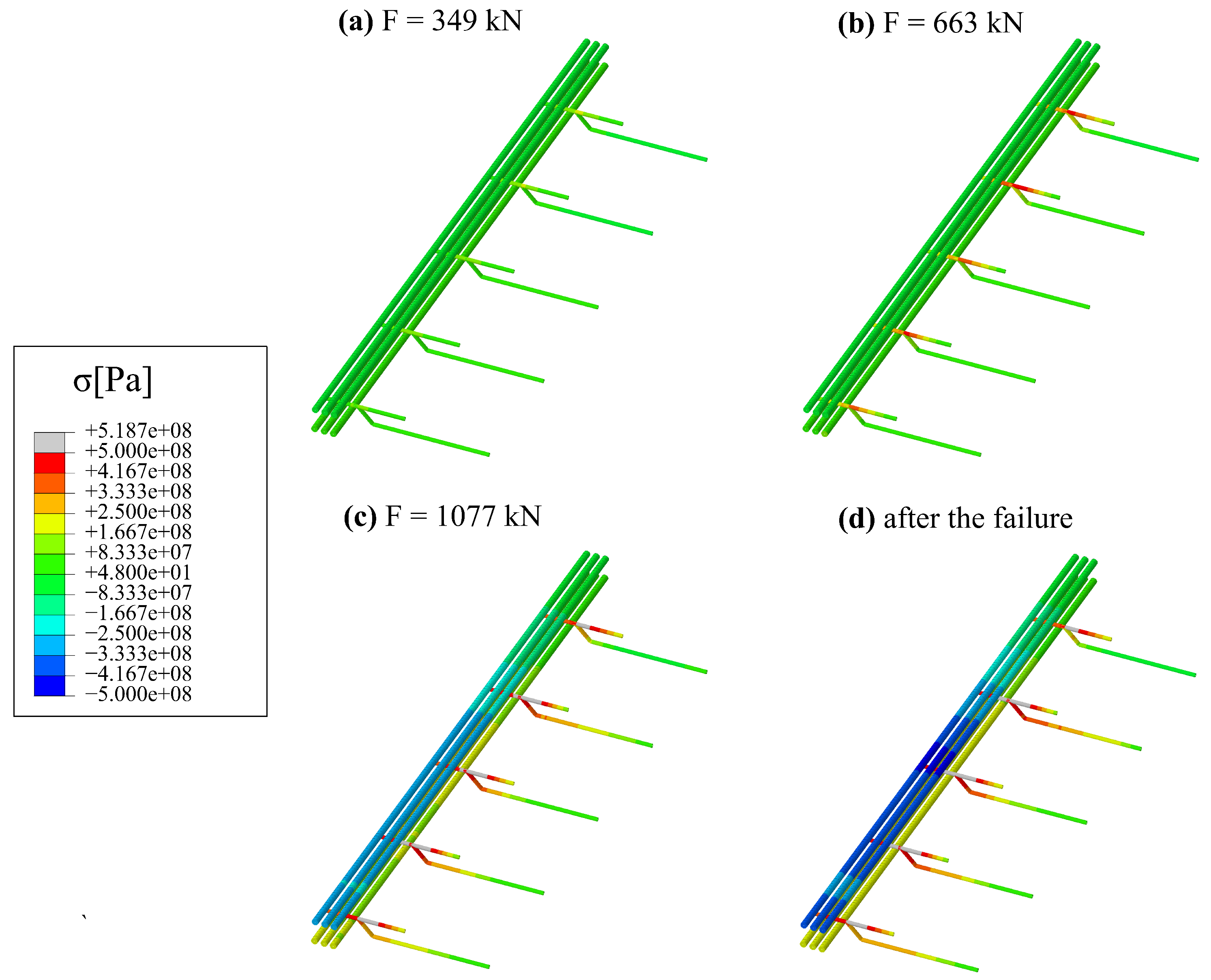
4.3. Results of the Analysis
- Coarse: 42 k finite elements (FE) and 139 k degrees of freedom (D.O.F), representative FE dimension for the RC core—2.2 cm;
- Default: 158 k FE and 472 k D.O.F.; representative FE dimension for the RC core—1.5 cm,
- Fine: 233 k FE and 656 k D.O.F., representative FE dimension for the RC core—0.8 cm.
5. Discussion
6. Conclusions
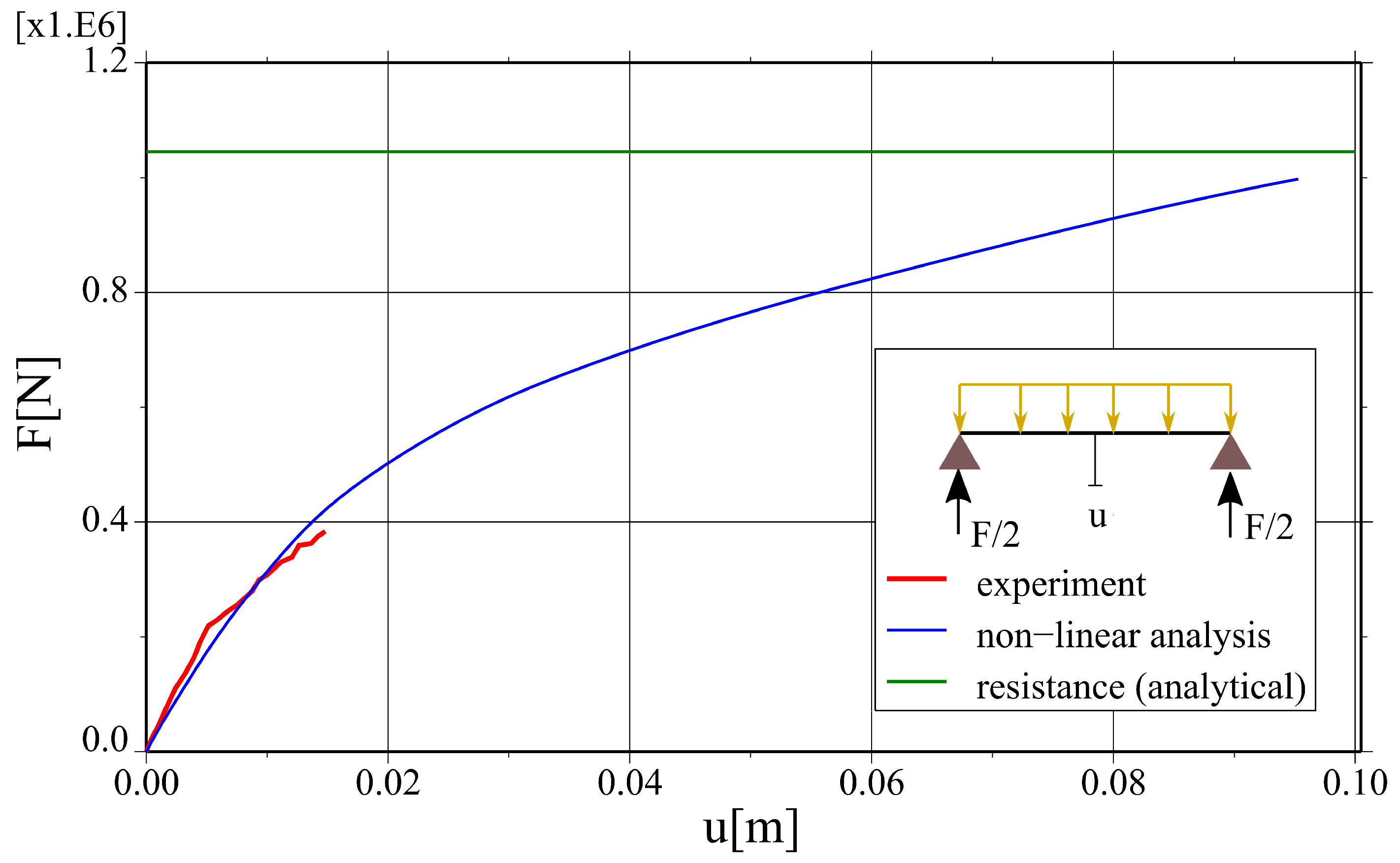
- In the described experimental field studies, it was proved that the new slim-floor system has the proper level of reliability. The registered deflections and strains for the service load level were not of great values. The system was almost at the elastic stage.
- The fairly good agreement between the different methods of assessments is obtained when the system and its execution complexity are taken into account. The relative difference for the ultimate force estimation is 3.9% (FE analysis vs. analytical calculations). The initial stiffness of the slim-floor system is perfectly captured by the model, whereas deflection for higher load levels is predicted with satisfactory accuracy—the relative difference for deflection under service load is 12.8% (FE analysis vs. experimenta research).
- The stiffness of slim-floor systems is ruled by the progressive loss of connection between the system parts. Therefore, a proper model of interfaces between different materials (or concretes cast at different times) is an essential issue for correct deflection predictions as well as non-linear material models for infill concrete. The approach described in [28] based on the adaptation of a standard Abaqus constitutive model for interfaces, using cohesive elements and enhanced with the user’s USDFLD subroutine strength envelope allowed us to obtain reliable results and is numerically efficient.
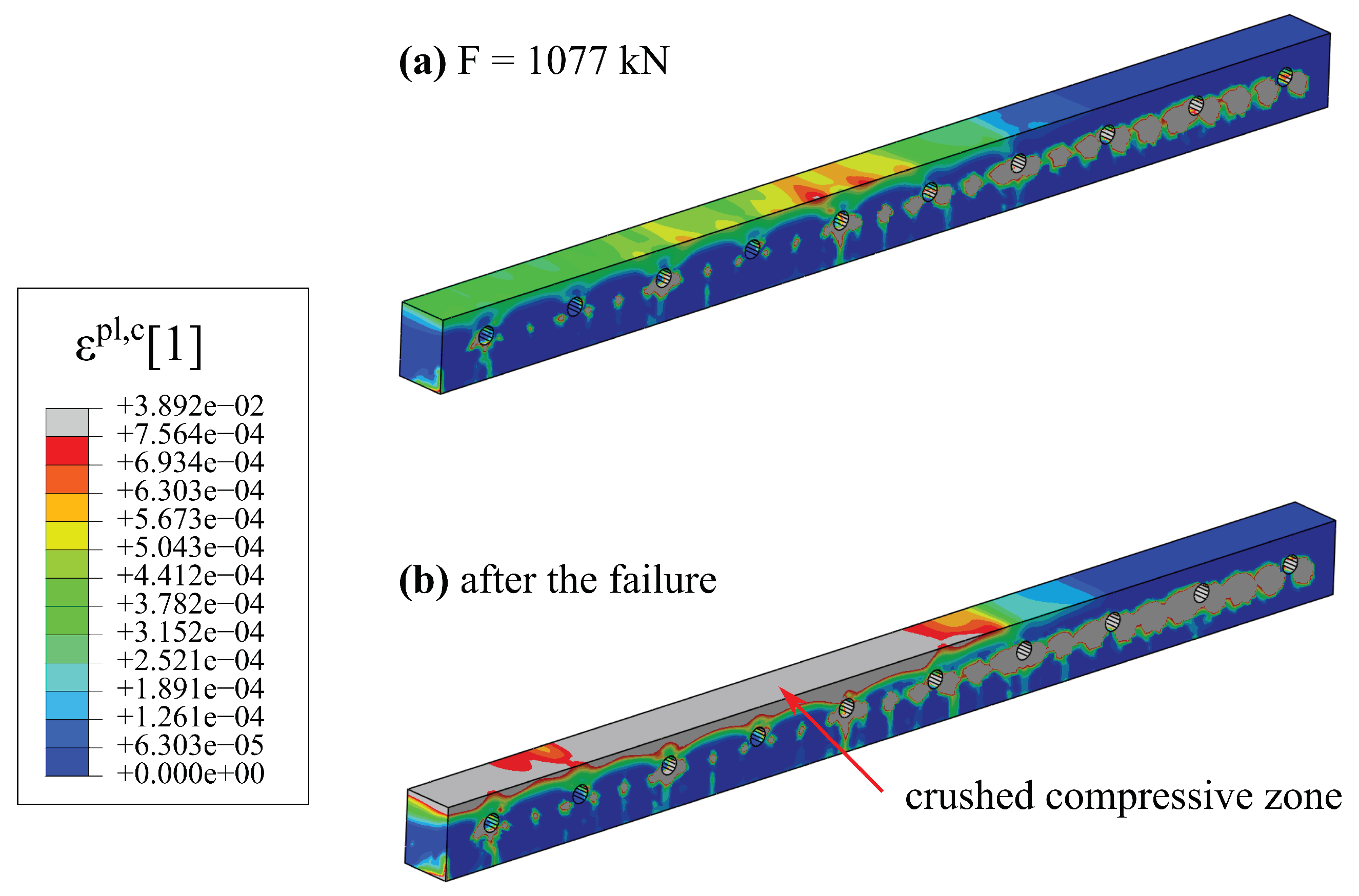
- Since the failure mode of the hybrid beam is not very typical for composite steel–concrete structures and consists in crushing the concrete compressive zone, a reliable model for concrete cores of hybrid beams is also of great importance. The widespread Concrete Damaged Plasticity model [27] proved its versatility and enabled the correct prediction of the failure mode and the value of the failure load for the analysed system. The calibration of its parameters is mostly based on the provisions of Eurocode 2 [31].
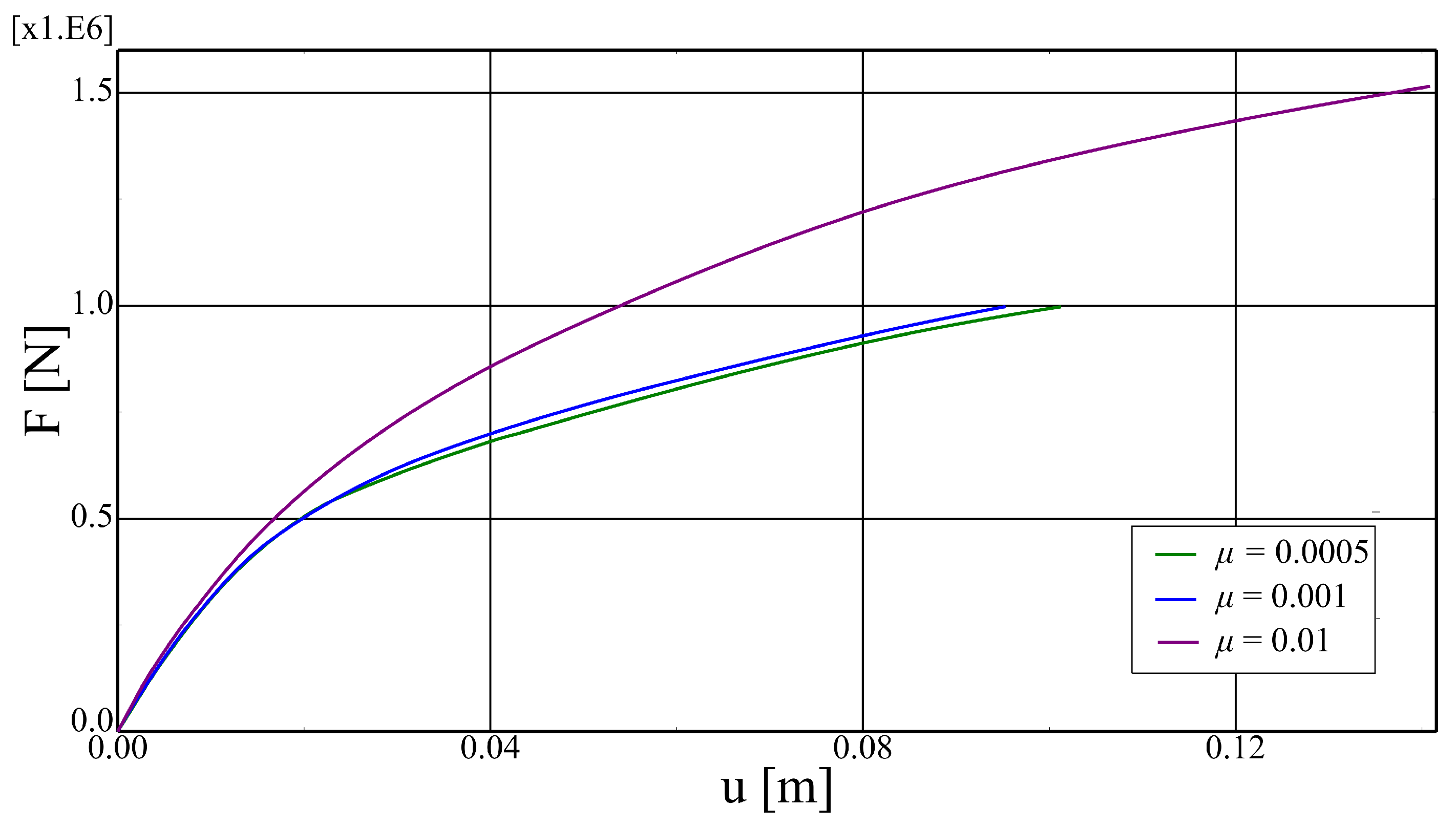
- Mesh dependency studies have revealed that the elements and their dimensions proposed in Section 4.1 are appropriate for such analyses. The system deformability is dependent mostly on the delamination of the interface zones. Consequently, the numerical model is not prone to mesh-dependency effects typical for strain-softening models since the constitutive models for interfaces are formulated as the traction–separation relations. On the other hand, users should be cautious in using viscous regularisation because it can cause a strong stiffening of the response of the model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johnson, R.P.; Wang, Y.C. Composite Structures of Steel and Concrete; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Hegger, J.; Bertram, G.; Dreßen, T.; Horstmann, M.; Roggendorf, T. Innovative Konzepte im Massivbau. Beton Stahlbetonbau 2009, 104, 17–26. [Google Scholar] [CrossRef]
- Schäfer, M. Determination of moment resistance for composite shallow-floor beams—Additional design rules for slim-floor beams. Stahlbau 2015, 84, 231–238. [Google Scholar] [CrossRef]
- Hegger, J.; Kerkeni, N.; Roggendorf, T. Zum Tragverhalten von Slim-floor-konstruktionen. Beton Stahlbetonbau 2008, 103, 2–11. [Google Scholar] [CrossRef]
- Hegger, J.; Roggendorf, T.; Kerkeni, N. Shear capacity of prestressed hollow core slabs in slim floor constructions. Eng. Struct. 2009, 31, 551–559. [Google Scholar] [CrossRef]
- Derkowski, W.; Surma, M. Prestressed hollow core slabs for topped slim floors—Theory and research of the shear capacity. Eng. Struct. 2021, 241, 112464. [Google Scholar] [CrossRef]
- Girhammar, U.A.; Pajari, M. Tests and analysis on shear strength of composite slabs of hollow core units and concrete topping. Constr. Build. Mater. 2008, 22, 1708–1722. [Google Scholar] [CrossRef]
- De Nardin, S.; El Debs, A.L. Composite connections in slim-floor system: An experimental study. J. Constr. Steel Res. 2012, 68, 78–88. [Google Scholar] [CrossRef]
- Limazie, T.; Chen, S. FE modeling and numerical investigation of shallow cellular composite floor beams. J. Constr. Steel Res. 2016, 119, 190–201. [Google Scholar] [CrossRef]
- Chen, S.; Limazie, T. Composite slim floor beams with innovative shear connections. Proc. Inst. Civ. Eng. Struct. Build. 2018, 171, 29–37. [Google Scholar] [CrossRef]
- Yan, J.B.; Liew, J.Y.R. Design and behavior of steel-concrete-steel sandwich plates subject to concentrated loads. Compos. Struct. 2016, 150, 139–152. [Google Scholar] [CrossRef]
- de Souza, P.T.; Kataoka, M.N.; El Debs, A.L. Experimental and numerical analysis of the push-out test on shear studs in hollow core slabs. Eng. Struct. 2017, 147, 398–409. [Google Scholar] [CrossRef]
- Lacki, P.; Kasza, P.; Adamus, K. Optimization of composite dowels shape in steel-concrete composite floor. Compos. Struct. 2019, 222, 110902. [Google Scholar] [CrossRef]
- Sheehan, T.; Dai, X.; Yang, J.; Zhou, K.; Lam, D. Flexural behaviour of composite slim floor beams. Structures 2019, 21, 22–32. [Google Scholar] [CrossRef]
- Dai, X.; Lam, D.; Sheehan, T.; Yang, J.; Zhou, K. Effect of dowel shear connector on performance of slim-floor composite shear beams. J. Constr. Steel Res. 2020, 173, 106243. [Google Scholar] [CrossRef]
- Albero, V.; Espinós, A.; Serra, E.; Romero, M.L.; Hospitaler, A. Numerical study on the flexural behaviour of slim-floor beams with hollow core slabs at elevated temperature. Eng. Struct. 2019, 180, 561–573. [Google Scholar] [CrossRef]
- Farhan, K.A.; Shallal, M.A. Experimental behaviour of concrete-filled steel tube composite beams. Arch. Civ. Eng. 2020, 66, 235–251. [Google Scholar] [CrossRef]
- Kyriakopoulos, P.; Peltonen, S.; Vayas, I.; Spyrakos, C.; Leskela, M. Experimental and numerical investigation of the flexural behavior of shallow floor composite beams. Eng. Struct. 2021, 231. [Google Scholar] [CrossRef]
- Alam, N.; Maraveas, C.; Tsavdaridis, K.D.; Nadjai, A. Performance of Ultra Shallow Floor Beams (USFB) Ex-posed to Standard and Natural Fires. J. Build. Eng. 2021, 38, 102810. [Google Scholar] [CrossRef]
- Alam, N.; Nadjai, A.; Hanus, F.; Kahanji, C.; Vassart, O. Experimental and Numerical Investigations on Slim Floor Beams Exposed to Fire. J. Build. Eng. 2021, 42, 102810. [Google Scholar] [CrossRef]
- Lukačević, I.; Ćurković, I.; Rajić, A.; Bartolac, M. Lightweight Composite Floor System—Cold-Formed Steel and Concrete—LWT-FLOOR Project. Buildings 2022, 12, 209. [Google Scholar] [CrossRef]
- Lechman, M. Cross-Sectional Analysis of the Resistance of RC Members Subjected to Bending with/without Axial Force. Materials 2022, 15, 1957. [Google Scholar] [CrossRef] [PubMed]
- Derysz, J.; Lewiński, P.M.; Więch, P. New Concept of Composite Steel-reinforced Concrete Floor Slab in the Light of Computational Model and Experimental Research. Procedia Eng. 2017, 193, 168–175. [Google Scholar] [CrossRef]
- Lewiński, P.M.; Derysz, J.; Dudziak, S.; Więch, P. Newly designed structural solutions for the ‘slim floor’ composite system. In Proceedings of the Fib Symposium 2019—Concrete: Innovations in Materials, Design and Structures, Krakow, Poland, 27–29 May 2019; pp. 873–880. [Google Scholar]
- Rogowska, A.M.; Lewiński, P.M. Mechanical properties of lightweight concrete with sintered aggregate. MATEC Web Conf. 2020, 323, 01005. [Google Scholar] [CrossRef]
- Czumaj, P.; Dudziak, S.; Kacprzyk, Z. In-Depth Verification of a Numerical Model for an Axisymmetric RC Dome. Symmetry 2021, 13, 2152. [Google Scholar] [CrossRef]
- Dassault Systèmes. Manual Abaqus 6.14; Documentation; Dassault Systèmes: Johnston, RI, USA, 2014. [Google Scholar]
- Dudziak, S.; Jackiewicz-Rek, W.; Kozyra, Z. On the Calibration of a Numerical Model for Con-crete-to-Concrete Interface. Materials 2021, 14, 7204. [Google Scholar] [CrossRef] [PubMed]
- Lewiński, P.M.; Więch, P.; Dudziak, S. Badania doświadczalne i analizy numeryczne konstrukcji stropów zespolonych typu “slim floor”. Inż. Bud. 2019, 75, 424–428. [Google Scholar]
- EN 1994-1-1; Eurocode 4: DeDesign of Composite Steel and Concrete Structures—Part 1-1: General Rules and Rules for Buildings. European Committee for Standardization: Brussels, Belgium, 2004.
- EN 1992-1-1; Eurocode 2: Design of Concrete Structures—Part 1-1: General Rules and Rules for Buildings. European Committee for Standardization: Brussels, Blegium, 2004.
- Markou, G.; Papadrakakis, M. Computationally Efficient 3D Finite Element Modeling of RC Structures. Comput. Concr. 2013, 12, 443–498. [Google Scholar] [CrossRef]
- Szczecina, M.; Winnicki, A. Selected Aspects of Computer Modeling of Reinforced Concrete Structures. Arch. Civ. Eng. 2016, 62, 51–64. [Google Scholar] [CrossRef]
- Wosatko, A.; Winnicki, A.; Polak, M.A.; Pamin, J. Role of dilatancy angle in plasticity-based models of con-crete. Arch. Civ. Mech. Eng. 2019, 19, 1268–1283. [Google Scholar] [CrossRef]
- Lubliner, J.; Oliver, J.; Oller, S.; Oñate, E. A plastic-damage model for concrete. Int. J. Solids Struct. 1989, 25, 299–326. [Google Scholar] [CrossRef]
- Lee, J.; Fenves, G.L. Plastic-Damage Model for Cyclic Loading of Concrete Structures. J. Eng. Mech. 1998, 124, 892–900. [Google Scholar] [CrossRef]
- Wosatko, A.; Genikomsou, A.; Pamin, J.; Polak, M.; Winnicki, A. Examination of two regularized damage-plasticity models for concrete with regard to crack closing. Eng. Fract. Mech. 2018, 194, 190–211. [Google Scholar] [CrossRef]
- Japan Society of Civil Engineers. JSCE Standard Specification for Concrete Structures—2007 Design; Japan Society of Civil Engineers: Tokyo, Japan, 2007. [Google Scholar]
- Kamińska, I.; Szwed, A. O kalibracji parametrów modelu konstytutywnego betonu i badaniach doświadczalnych temu służących. In Beton i konstrukcje z betonu—Badania; Oficyna Wydawnicza Politechniki Warszawskiej: Warsaw, Poland, 2015. [Google Scholar]
- EN 1993-1-1:2005; Eurocode 3: Design of Steel Structures, Part 1-1: General Rules and Rules for Buildings. European Committee for Standardization: Brussels, Belgium, 2005.
- Cervenka Consulting. ATENA Program—Part 1: Theory; Cervenka Consulting: Prague, Czech Republic, 2018. [Google Scholar]
- Ge, M.; Cheng, X.; Zhang, Q. Compressive test and numerical simulation of center-notched composite laminates with different crack configurations. Polym. Compos. 2017, 38, 2631–2641. [Google Scholar]
- Carol, I.; Prat, P.C.; Lopez, C.M. Normal Shear Cracking Model: Application to Discrete Crack Analysis. J. Eng. Mech. 1997, 123, 765–773. [Google Scholar] [CrossRef]
- Ottosen, N.S.; Ristinmaa, M. Thermodynamically based fictitious crack/interface model for general normal and shear loading. Int. J. Solids Struct. 2013, 50, 3555–3561. [Google Scholar] [CrossRef]
- Halicka, A. Studium stanu naprężeń i odkształceń w płaszczyźnie styku i strefie przypodporowej elementów zespolonych z udziałem betonów skurczowych i ekspansywnych; Wydawnictwo Politechniki Lubelskiej: Lublin, Poland, 2007. [Google Scholar]
- Wang, Y.H.; Nie, J.G.; Cai, C.S. Numerical modeling on concrete structures and steel-concrete composite frame structures. Compos. Part Eng. 2013, 51, 58–67. [Google Scholar] [CrossRef]
- Esteghamati, M.Z.; Alimohammadi, S. Reliability-based assessment of progressive collapse in horizontally irregular multi-storey concrete buildings. Structures 2022, 44, 1597–1606. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Assumed Value/Formula | Reference |
|---|---|---|---|
| Elasticity | |||
| E | Young’s Modulus | (*) | EN 1992-1-1 [31] |
| Poisson’s ratio | 0.2 | EN 1992-1-1 [31] | |
| Ultimate surface | |||
| Uniaxial compressive strength | (*) | EN 1992-1-1 [31] | |
| Uniaxial tensile strength | , MPa , MPa (*) | EN 1992-1-1 [31] | |
| Ratio of biaxial to uniaxial compressive strength | 1.16 | [27] | |
| Parameter controlling the shape of deviatoric section | 0.667 | [27] | |
| Hardening/Softening Rule | |||
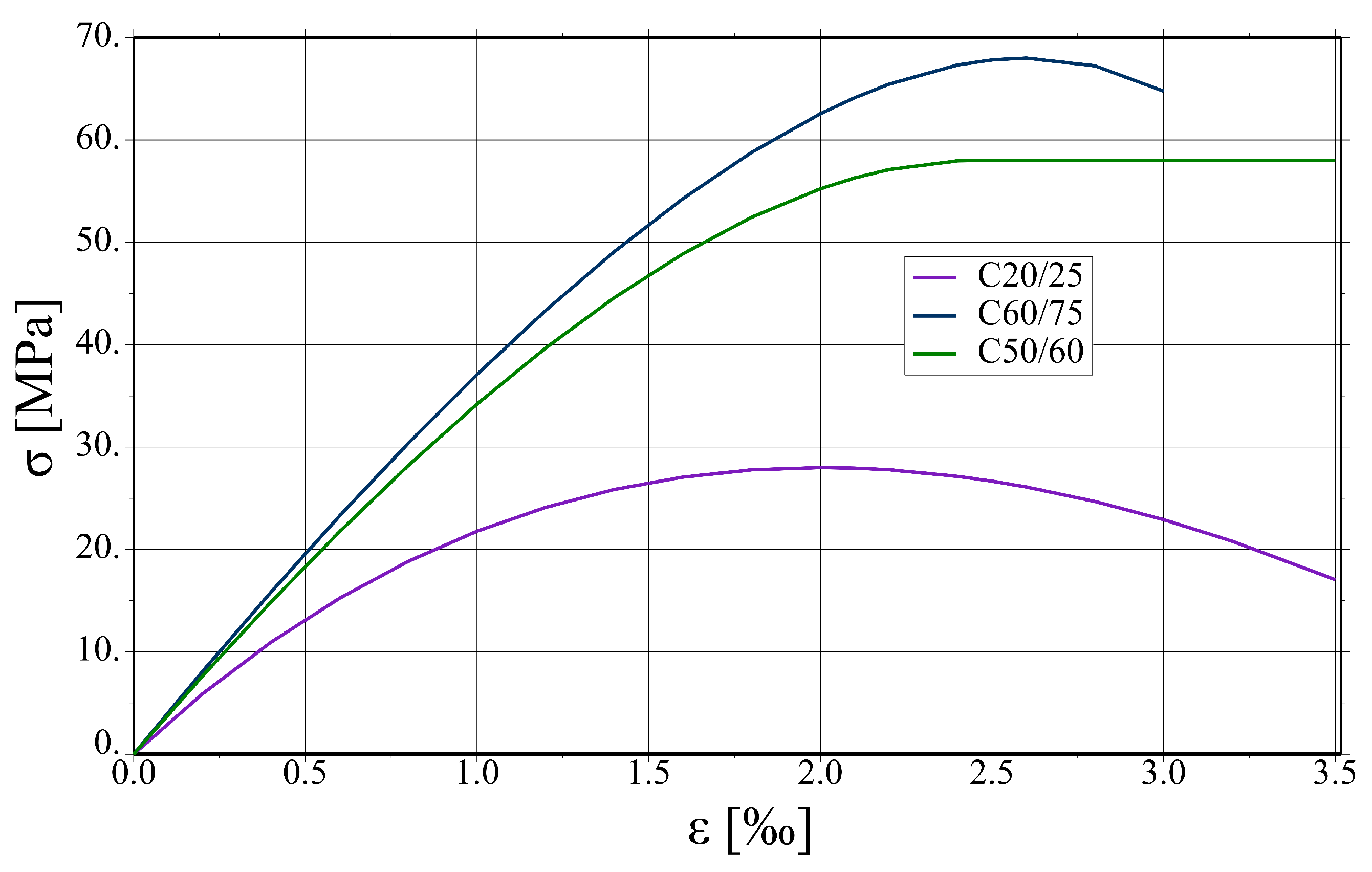
| Hardening rule in compression | Madrid parabola | EN 1992-1-1 [31] | |
| Linear softening in tension ruled by fracture energy | (*) | JSCE [38] | |
| Plastic Potential and Viscoplastic Regularisation | |||
| Dilatancy angle | [39] | ||
| Eccentricity | 0.1 | [27] | |
| Viscosity parameter | 0.0001 | [33] | |
| Feature | C20/25 | C50/60 | C50/60 Prestressed Area | C60/75 |
|---|---|---|---|---|
| E [GPa] | 30 | 37 | 37 | 39 |
| [1] | 0.2 | 0.2 | 0.2 | 0.2 |
| [MPa] | 28 | 58 | 58 | 68 |
| [MPa] | 2.2 | 4.1 | 11.1 | 4.4 |
| behaviour in tension | linear softening N/m | linear softening N/m | no softening | linear softening N/m |
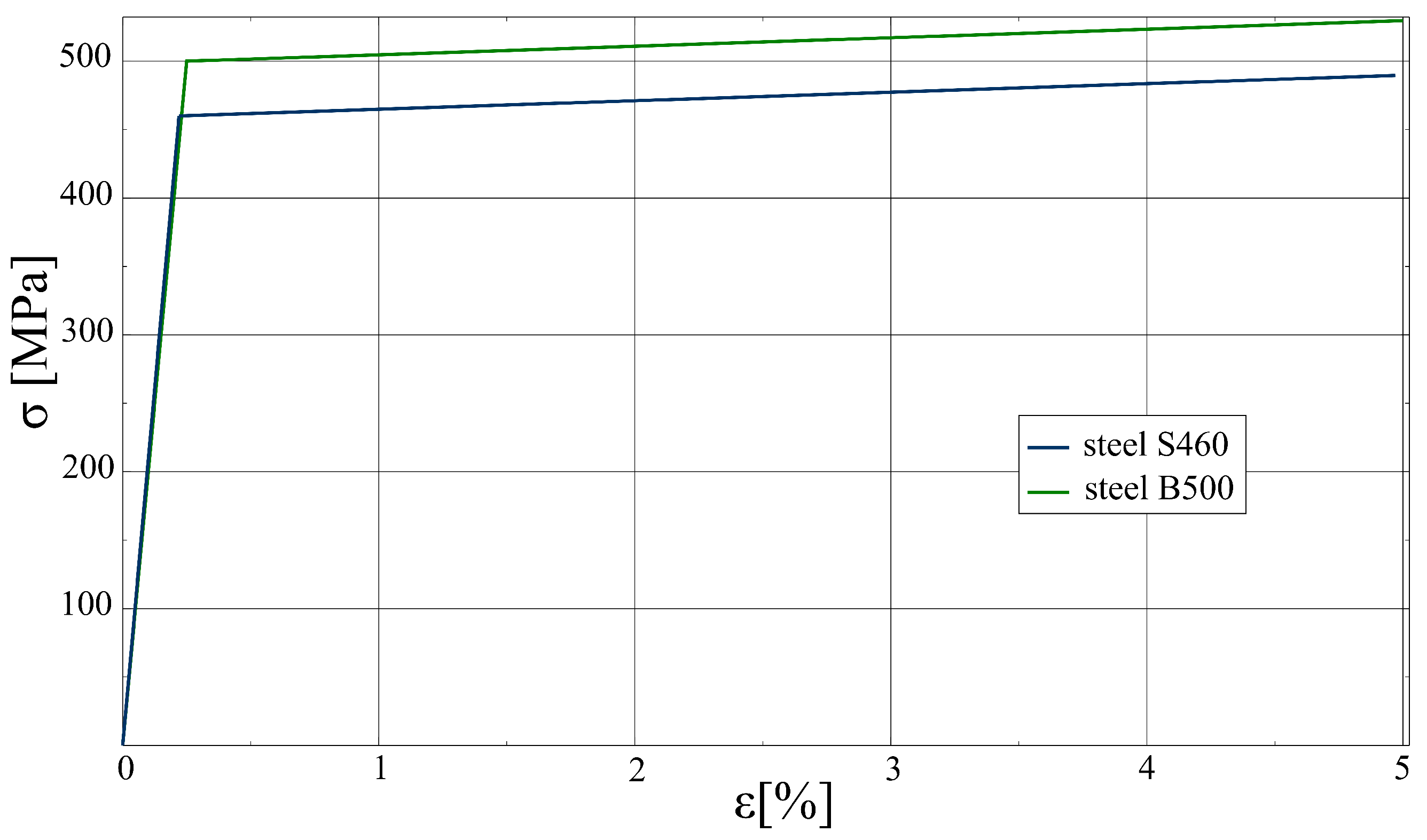
| Feature | Profile—S460 | Rebar—B500 | Tendons |
|---|---|---|---|
| E [GPa] | 210 | 200 | 200 |
| [1] | 0.3 | - | - |
| [MPa] | 460 | 500 | - |
| [GPa] | 1 | 1 | - |
| Symbol | Parameter | Assumed Value/Formula | Reference |
|---|---|---|---|
| Elasticity | |||
| Stiffness in normal direction | [41] | ||
| , | Stiffness in tangential directions | [41] | |
| t | Interface thickness | [41] | |
| Damage Initiation Criterion | |||
| Tensile strength (mode I) | [28,45] | ||
| Shear strength (mode II) | acc. to Carol’s Formula, USDFLD | [43] | |
| Damage Evolution Rule and Viscous Regularisation | |||
| Softening type | Exponential shape | ||
| Parameter of exponential function | ≈7 | [28] | |
| Failure separation in mode I | Based on the fracture energy | [28] | |
| Failure separation in mode II | Based on the fracture energy | [28] | |
| Viscosity parameter | 0.001 | ||
| Feature | HB Concrete— Infill | HB Steel— Infill | HCS— Infill |
|---|---|---|---|
| [1] | 0.5 | 0.25 | 0.32 |
| [GPa] | 30 | 30 | 30 |
| or [GPa] | 12.5 | 12.5 | 12.5 |
| [m] | 0.01 | 0.01 | 0.01 |
| [MPa] | 1.2 | 0.55 | 0.7 |
| c [MPa] | 3.1 | 1.1 | 1.4 |
| [deg] | 40 | 40 | 40 |
| [N/m] | 20 | 10 | 13 |
| [m] | 0.00012 | 0.00012 | 0.00013 |
| [N/m] | 1200 | 200 | 250 |
| [m] | 0.0037 | 0.0015 | 0.0016 |
| Experiment | Analytical Calculations | NLFEA | Difference [%] | |
|---|---|---|---|---|
| self-weight | kN | n/a | kN | 11.3% |
| load capacity | n/a | kN | kN | 3.9% |
| deflection for service load | mm | n/a | mm | 12.8% |
| ( kN) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dudziak, S.; Lewiński, P.M. A Detailed Numerical Model for a New Composite Slim-Floor Slab System. Materials 2024, 17, 1464. https://doi.org/10.3390/ma17071464
Dudziak S, Lewiński PM. A Detailed Numerical Model for a New Composite Slim-Floor Slab System. Materials. 2024; 17(7):1464. https://doi.org/10.3390/ma17071464
Chicago/Turabian StyleDudziak, Sławomir, and Paweł M. Lewiński. 2024. "A Detailed Numerical Model for a New Composite Slim-Floor Slab System" Materials 17, no. 7: 1464. https://doi.org/10.3390/ma17071464
APA StyleDudziak, S., & Lewiński, P. M. (2024). A Detailed Numerical Model for a New Composite Slim-Floor Slab System. Materials, 17(7), 1464. https://doi.org/10.3390/ma17071464