An Approach to the Dynamics and Control of Uncertain Robot Manipulators

 , ,
, ,
Abstract
:1. Introduction
2. Udwadia–Kalaba Equation
3. Tracking Control of Robot Manipulators with Uncertain Dynamics
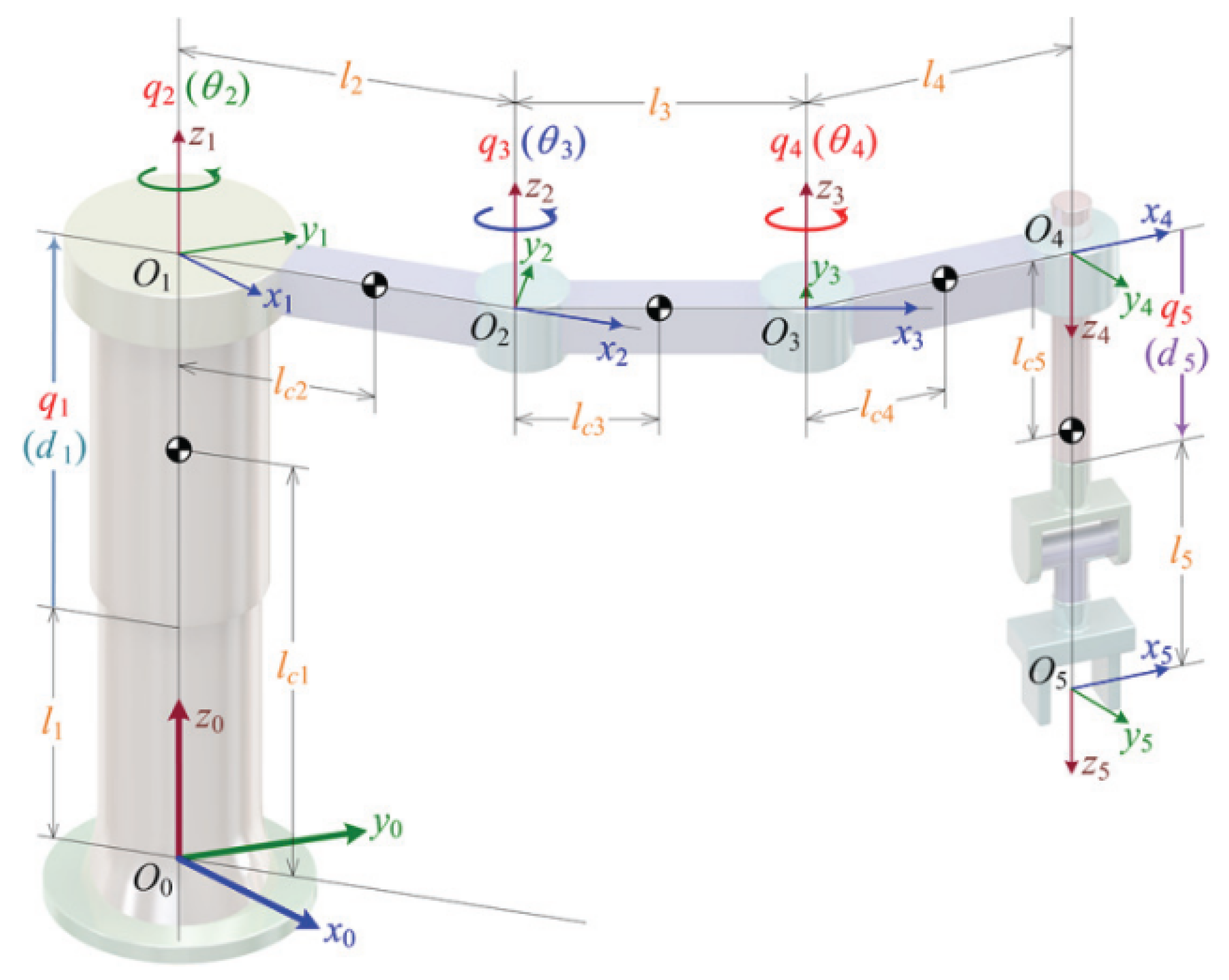
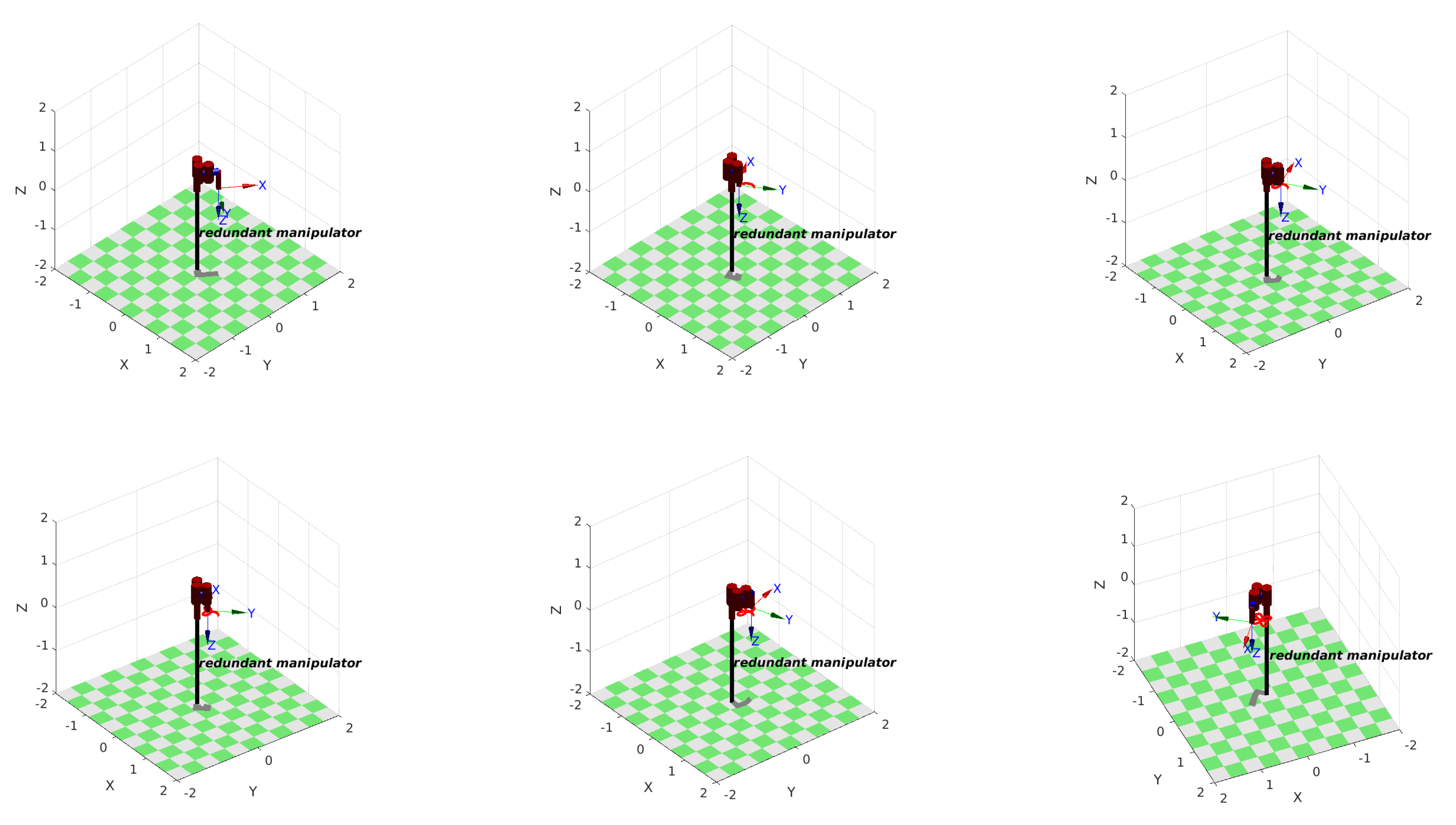
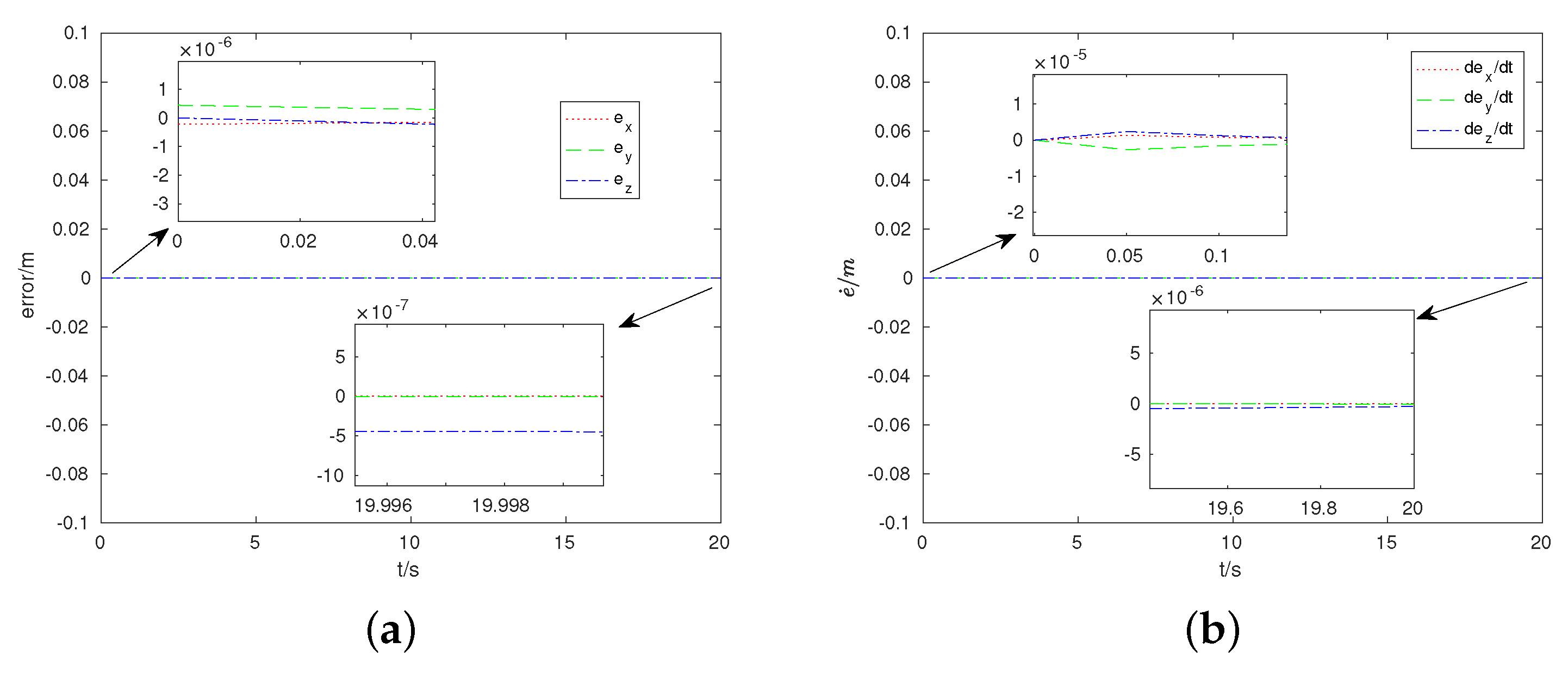
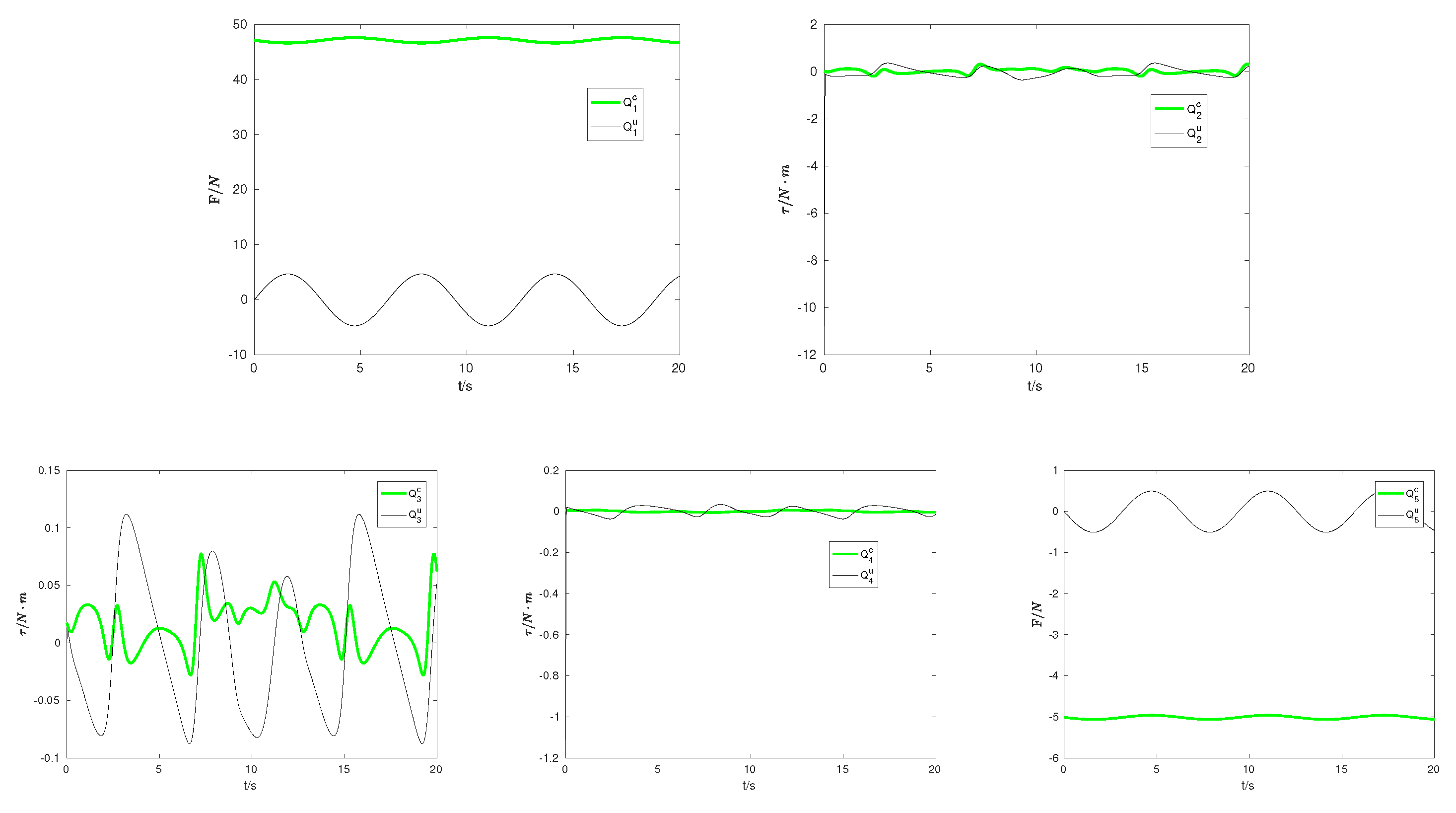
4. Application Example: A Redundant SCARA-Type Manipulator
4.1. Kinematics Analysis
4.2. Dynamics Analysis
4.3. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, W.; Ge, W.; Li, Y.; Liu, Y.J.; Yang, C.; Sun, C. Model identification and control design for a humanoid robot. IEEE Tran. Syst. Man Cybern. Syst. 2017, 47, 45–57. [Google Scholar] [CrossRef]
- Antonello, A.; Valverde, A.; Tsiotras, P. Dynamics and Control of Spacecraft Manipulators with Thrusters and Momentum Exchange Devices. J. Guid. Control Dyn. 2018, 42, 15–29. [Google Scholar] [CrossRef]
- Yang, C.; Jiang, Y.; He, W.; Na, J.; Li, Z.; Xu, B. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence. IEEE Trans. Ind. Electron. 2018, 65, 8112–8123. [Google Scholar] [CrossRef]
- Pradhan, S.; Modi, V.; Misra, A.K. Order N formulation for flexible multibody systems in tree topology: Lagrangian approach. J. Guid. Control Dyn. 1997, 20, 665–672. [Google Scholar] [CrossRef]
- Korayem, M.; Basu, A. Automated fast symbolic modeling of robotic manipulators with compliant links. Math. Comput. Model. 1995, 22, 41–55. [Google Scholar] [CrossRef]
- Banerjee, A.K. Block-diagonal equations for multibody elastodynamics with geometric stiffness and constraints. J. Guid. Control Dyn. 1993, 16, 1092–1100. [Google Scholar] [CrossRef]
- Kovecses, J.; Piedboeuf, J.C.; Lange, C. Dynamics modeling and simulation of constrained robotic systems. IEEE/ASME Trans. Mechatron. 2003, 8, 165–177. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Y.; Li, S. Tracking Control of Robot Manipulators with Unknown Models: A Jacobian-Matrix-Adaption Method. IEEE Trans. Ind. Informat. 2018, 14, 3044–3053. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S. Exponential Tracking Control of Robotic Manipulators With Uncertain Dynamics and Kinematics. IEEE Trans. Ind. Informat. 2018, 15, 689–698. [Google Scholar] [CrossRef]
- Fateh, M.M. Nonlinear control of electrical flexible-joint robots. Nonlinear Dyn. 2012, 67, 2549–2559. [Google Scholar] [CrossRef]
- Sung, J.Y.; Jin, B.P.; Yoon, H.C. Adaptive Output Feedback Control of Flexible-Joint Robots Using Neural Networks: Dynamic Surface Design Approach. IEEE Trans. Neural Netw. 2008, 19, 1712–1726. [Google Scholar] [CrossRef] [PubMed]
- Udwadia, F.E. Optimal tracking control of nonlinear dynamical systems. Proc. R. Soc. A Math. Phys. Eng. Sci. 2008, 464, 2341–2363. [Google Scholar] [CrossRef]
- Udwadia, F.E.; Kalaba, R.E. Explicit equations of motion for mechanical systems with nonideal constraints. J. Appl. Mech. 2001, 68, 462–467. [Google Scholar] [CrossRef]
- Udwadia, F.E. On constrained motion. Appl. Math. Comput. 2005, 164, 313–320. [Google Scholar] [CrossRef]
- Udwadia, F.E.; Koganti, P.B. Dynamics and control of a multi-body planar pendulum. Nonlinear Dyn. 2015, 81, 845–866. [Google Scholar] [CrossRef]
- Udwadia, F.E.; Wanichanon, T.; Cho, H. Methodology for Satellite Formation-Keeping in the Presence of System Uncertainties. J. Guid. Control Dyn. 2014, 37, 1611–1624. [Google Scholar] [CrossRef]
- Udwadia, F.E.; Wanichanon, T. Control of Uncertain Nonlinear Multibody Mechanical Systems. J. Appl. Mech. 2013, 81, 041020. [Google Scholar] [CrossRef]
- Korayem, M.; Dehkordi, S. Derivation of motion equation for mobile manipulator with viscoelastic links and revolute–prismatic flexible joints via recursive Gibbs–Appell formulations. Robot. Auton. Syst. 2018, 103, 175–198. [Google Scholar] [CrossRef]
- De Falco, D.; Pennestri, E.; Vita, L. Investigation of the influence of pseudoinverse matrix calculations on multibody dynamics simulations by means of the Udwadia-Kalaba formulation. J. Aerosp. Eng. 2009, 22, 365–372. [Google Scholar] [CrossRef]
- Nuchkrua, T.; Chen, S.L. Precision Contouring Control of 5 DoF Robot Manipulators with Unknown Environment. In Proceedings of the 2017 11th Asian Control Conference (ASCC) IEEE, Gold Coast, Australia, 17–20 December 2017; pp. 976–981. [Google Scholar]
- Pennestrì, E.; Paolo Valentini, P.; de Falco, D. An application of the Udwadia-Kalaba dynamic formulation to flexible multibody systems. J. Frankl. Inst. 2010, 347, 173–194. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.H.; Zhao, H.; Sun, H.; Zhao, F.; Huang, K.; Zhen, S. Application of the Udwadia–Kalaba approach to tracking control of mobile robots. Nonlinear Dyn. 2015, 83, 389–400. [Google Scholar]
- Hui, J.; Pan, M.; Zhao, R.; Luo, L.; Wu, L. The closed-form motion equation of redundant actuation parallel robot with joint friction: An application of the Udwadia–Kalaba approach. Nonlinear Dyn. 2018, 93, 689–703. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Y.H.; Zhong, Z. Udwadia-Kalaba approach for parallel manipulator dynamics. J. Dyn. Syst. Meas. Control 2013, 135, 061003. [Google Scholar] [CrossRef]
- Nielsen, M.C.; Eidsvik, O.A.; Blanke, M.; Schjølberg, I. Constrained multi–body dynamics for modular underwater robots—Theory and experiments. Ocean Eng. 2018, 149, 358–372. [Google Scholar] [CrossRef]
- Liang, D.; Song, Y.; Sun, T.; Jin, X. Rigid-flexible coupling dynamic modeling and investigation of a redundantly actuated parallel manipulator with multiple actuation modes. J. Sound Vib. 2017, 403, 129–151. [Google Scholar] [CrossRef]
- Spada, R.P.; Nicoletti, R. The Udwadia–Kalaba Trajectory Control Applied to a Cantilever Beam—Experimental Results. J. Dyn. Syst. Meas. Control 2017, 139, 091002. [Google Scholar] [CrossRef]
- Cho, H.; Udwadia, F.E. Explicit solution to the full nonlinear problem for satellite formation-keeping. Acta Astron. 2010, 67, 369–387. [Google Scholar] [CrossRef]
- Udwadia, F.; Wanichanon, T. A Closed-Form Approach to Tracking Control of Nonlinear Uncertain Systems Using the Fundamental Equation; American Society of Civil Engineers: Reston, VA, USA, 2012; pp. 1339–1348. [Google Scholar]
- Peters, J.; Mistry, M.; Udwadia, F.; Nakanishi, J.; Schaal, S. A unifying framework for robot control with redundant DOFs. Auton. Robots 2008, 24, 1–12. [Google Scholar] [CrossRef]
- Urrea, C.; Kern, J. Trajectory tracking control of a real redundant manipulator of the SCARA type. J. Electr. Eng. Technol. 2016, 11, 215–226. [Google Scholar] [CrossRef]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in MATLA B; Springer: New York, NY, USA, 2011. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ||||
| 1 | 0 | 0 | 0 | |
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | |||
| 5 | 0 | 0 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zhang, X.; Xu, S.; Ding, Y.; Zhu, K.; Liu, P.X. An Approach to the Dynamics and Control of Uncertain Robot Manipulators. Algorithms 2019, 12, 66. https://doi.org/10.3390/a12030066
Yang X, Zhang X, Xu S, Ding Y, Zhu K, Liu PX. An Approach to the Dynamics and Control of Uncertain Robot Manipulators. Algorithms. 2019; 12(3):66. https://doi.org/10.3390/a12030066
Chicago/Turabian StyleYang, Xiaohui, Xiaolong Zhang, Shaoping Xu, Yihui Ding, Kun Zhu, and Peter Xiaoping Liu. 2019. "An Approach to the Dynamics and Control of Uncertain Robot Manipulators" Algorithms 12, no. 3: 66. https://doi.org/10.3390/a12030066
APA StyleYang, X., Zhang, X., Xu, S., Ding, Y., Zhu, K., & Liu, P. X. (2019). An Approach to the Dynamics and Control of Uncertain Robot Manipulators. Algorithms, 12(3), 66. https://doi.org/10.3390/a12030066