On the Solutions of Second-Order Differential Equations with Polynomial Coefficients: Theory, Algorithm, Application

 , ,
, ,
Abstract
:1. Introduction
“Under what conditions on the equation parameters , , and does the differential Equation (3) have polynomial solutions? If it does have polynomial solutions, how can we construct them?”
- In Section 3, Scheffé criteria is revised to analyze Equation (3) and to generate exactly solvable equations where the coefficients of their power series solutions are easily computed using a two-term recurrence relation. The closed form solutions of these equations are written in terms of the generalized hypergeometric functionswhere the Pochhammer symbol is defined in terms of the Gamma function as .
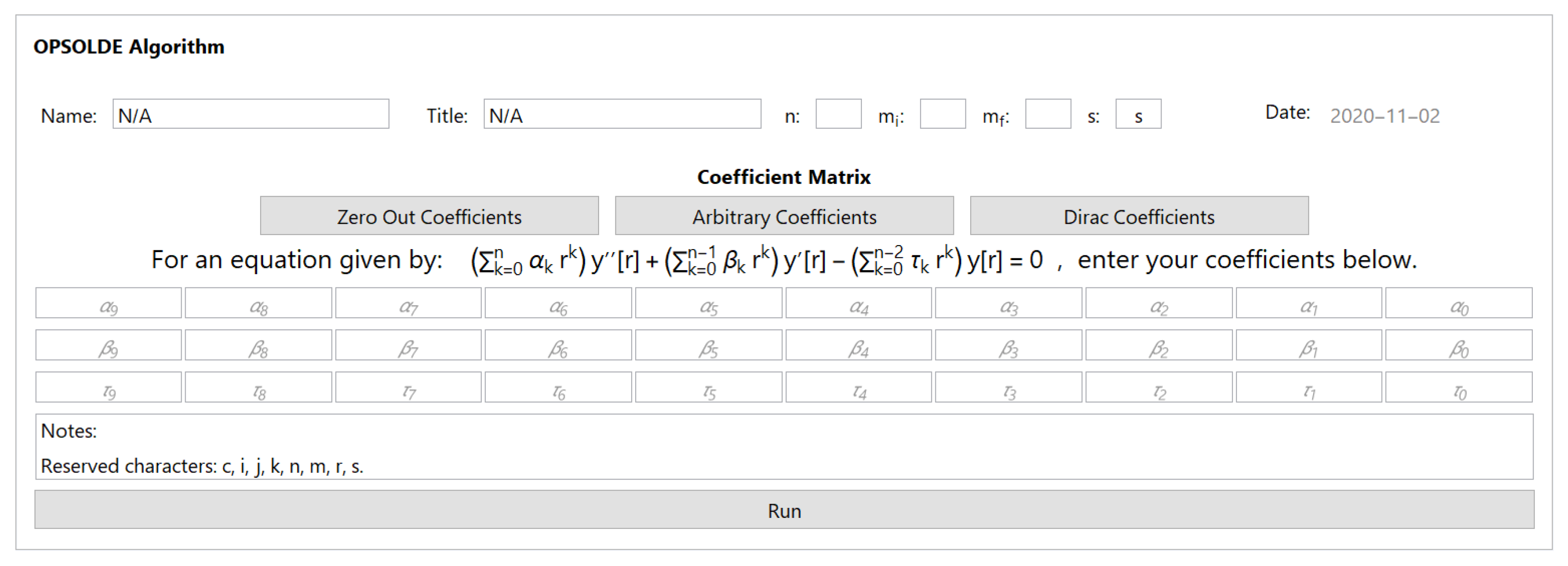
- In Section 4 we present three theorems corresponding to the cases: (1) , (2) , , and (3) , which are required to establish the polynomial solutions of Equation (3). We shall show that for the mth-degree polynomial solutions, there are conditions that ultimately assemble these polynomials. At the end of the section we briefly discuss the Mathematica® program used to generate the solutions of these equations.
- Lastly, Section 5 demonstrates the validity of these constructions through the application of our results to some problems that have appeared in mathematics and physics literature.
2. A Necessary but Not Sufficient Condition
The Inverse Square-Root Potential
3. Scheffé’s Criteria: Two-Term Recurrence Relation
- In the case of and , Equation (20) reads:and the corresponding Equation (25) with , , , , and readsThe two-term recurrence formula for the solution of Equation (27) iswhere are the zeros of the indicial equation , namely, , and .The closed form solutions in terms of the Gauss hypergeometric functions, respectively, are:and
- The two-term recurrence relation for the solutions of Equation (32) readswhere, are the roots of the indicial equation , , with closed form solutionsand
4. Theorems and Algorithm
4.1. Theorems
4.2. The Mathematica® Program
5. Applications
5.1. General Case ()
5.2. Two-Dimensional Dirac Equation
5.3. The Heun Equation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Primitivo, B. Acosta-Humánez, David Blázquez-Sanz, Henock Venegas-Gómez, Liouvillian solutions for second order linear differential equations with polynomial coefficients. São Paulo J. Math. Sci. 2020. [Google Scholar] [CrossRef]
- Raposo, A.P.; Weber, H.J.; Alvarez-Castillo, D.E.; Kirchbach, M. Romanovski polynomials in selected physics problems. Centr. Eur. J. Phys. 2007, 5, 253–284. [Google Scholar] [CrossRef] [Green Version]
- Ovsiyuk, E.; Amirfachrian, M.; Veko, O. On Schrödinger equation with potential V(r)=αr−1+βr+kr2 and the biconfluent Heun functions theory. Nonl. Phen. Compl. Sys. 2012, 15, 163. [Google Scholar]
- Caruso, F.; Martins, J.; Oguri, V. Solving a two-electron quantum dot model in terms of polynomial solutions of a biconfluent Heun equation. Ann. Phys. 2014, 347, 130–140. [Google Scholar] [CrossRef] [Green Version]
- Marcilhacy, G.; Pons, R. The Schrödinger equation for the interaction potential x2 + λx2/(1 + gx2), and the first Heun confluent equation. J. Phys. A Math. Gen. 1985, 18, 2441–2449. [Google Scholar] [CrossRef]
- Exton, H. The interaction V(r) = −Ze2/(r + β) and the confluent Heun equation. J. Phys. A Math. Gen. 1991, 24, L329–L330. [Google Scholar] [CrossRef]
- Ciftci, H.; Hall, R.L.; Saad, N.; Dogu, E. Physical applications of second-order linear differential equations that admit polynomial solutions. J. Phys. A Math. Theor. 2010, 43, 415206. [Google Scholar] [CrossRef]
- Hall, R.H.; Saad, N.; Sen, K.D. Soft-core Coulomb potentials and Heun’s differential equation. J. Math. Phys. 2010, 51, 022107. [Google Scholar] [CrossRef] [Green Version]
- Hall, R.L.; Saad, N.; Sen, K.D. Discrete spectra for confined and unconfined −a/r + br2 potentials in d-dimensions. J. Math. Phys. 2011, 52, 092103. [Google Scholar] [CrossRef] [Green Version]
- Hall, R.L.; Saad, N.; Sen, K.D. Spectral characteristics for a spherically confined −a/r + br2 potential. J. Phys. A Math. Theor. 2011, 44, 185307. [Google Scholar] [CrossRef] [Green Version]
- Hortacsu, M. Heun functions and their uses in physics. arXiv 2013, arXiv:1101.0471v1. [Google Scholar]
- Zhang, Y.-Z. Exact polynomial solutions of second order differential equations and their applications. J. Phys. A Math. Theor. 2012, 45, 065206. [Google Scholar] [CrossRef]
- Saad, N.; Hall, R.L.; Trenton, V. Polynomial solutions for a class of second-order linear differential equations. Appl. Math. Comput. 2014, 226, 615–634. [Google Scholar] [CrossRef]
- Wen, F.-K.; Yang, Z.-Y.; Liu, C.; Yang, W.-L.; Zhang, Y.-Z. Exact polynomial solutions of Schrödinger equation with various hyperbolic potentials. Commun. Theor. Phys. 2014, 61, 153. [Google Scholar] [CrossRef]
- Sun, D.; You, Y.; Lu, F.; Chen, C.; Dong, S. The quantum characteristics of a class of complicated double ring-shaped non-central potential. Phys. Scr. 2014, 89, 045002. [Google Scholar] [CrossRef]
- Chiang, C.; Ho, C. Planar Dirac electron in Coulomb and magnetic fields: A Bethe ansatz approach. J. Math. Phys. 2002, 43, 43–51. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.Y.; Lu, F.L.; Sun, D.S.; Dong, S.H. The origin and mathematical characteristics of the Super-Universal Associated-Legendre polynomials. Commun. Theor. Phys. 2014, 62, 331–337. [Google Scholar] [CrossRef]
- Chen, C.Y.; You, Y.; Lu, F.L.; Sun, D.S.; Dong, S.-H. Exact solutions to a class of differential equation and some new mathematical properties for the universal associated-Legendre polynomials. Appl. Math. Lett. 2015, 40, 90–96. [Google Scholar] [CrossRef]
- Chen, C.Y.; Lu, F.L.; Sun, D.S.; You, Y.; Dong, S.-H. Spin-orbit interaction for the double ring-shaped oscillator. Ann. Phys. 2016, 371, 183–198. [Google Scholar] [CrossRef]
- Dong, S.; Sun, G.; Falaye, B.J.; Dong, S.-H. Semi-exact solutions to position-dependent mass Schrödinger problem with a class of hyperbolic potential V0 tanh(ax). Eur. Phys. J. Plus 2016, 131, 176. [Google Scholar] [CrossRef]
- Ishkhanyan, A. Exact solution of the Schrödinger equation for the inverse square root potential. Europhys. Lett. 2015, 112, 10006. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Dai, W. Exact solution of inverse-square-root potential V(x) = −α/r. Ann. Phys. 2016, 373, 207–215. [Google Scholar] [CrossRef] [Green Version]
- Fernández, F.M. Comment on: Exact solution of the inverse-square-root potential V(r)=−α/r. Ann. Phys. 2017, 379, 83–85. [Google Scholar] [CrossRef]
- Ishkhanyan, A.M. Schrödinger potentials solvable in terms of the general Heun functions. Ann. Phys. 2018, 388, 456–471. [Google Scholar] [CrossRef] [Green Version]
- Ishkhanyan, A.M. Exact solution of the Schrödinger equation for a short-range exponential potential with inverse square root singularity. Eur. Phys. J. Plus 2018, 133, 83. [Google Scholar] [CrossRef] [Green Version]
- Maiz, F.; Alqahtani, M.M.; Al Sdran, N.; Ghnaim, I. Sextic and decatic anharmonic oscillator potentials: Polynomial solutions. Phys. B 2018, 530, 101–106. [Google Scholar] [CrossRef]
- Dong, S.; Dong, Q.; Sun, G.-H.; Femmam, S.; Dong, S.-H. Exact solutions of the Razavy Cosine Type potential. Adv. High Energy Phys. 2018, 2018, 5824271. [Google Scholar]
- Dong, Q.; Serrano, F.A.; Sun, G.-H.; Jing, J.; Dong, S.-H. Semi-exact Solutions of the Razavy Potential. Adv. High Energy Phys. 2018, 2018, 9105825. [Google Scholar] [CrossRef]
- Dong, Q.; Dong, S.S.; Hernández-Márquez, E.; Silva-Ortigoza, R.; Sun, G.H.; Dong, S.H. Semi-exact Solutions of Konwent Potential. Commun. Theor. Phys. 2019, 71, 231. [Google Scholar] [CrossRef] [Green Version]
- Dong, Q.; Sun, G.-H.; Jing, J.; Dong, S.-H. New findings for two new type sine hyperbolic potentials. Phys. Lett. A 2019, 383, 270–275. [Google Scholar] [CrossRef]
- Bazighifan, O. Some New Oscillation Results for Fourth-Order Neutral Differential Equations with a Canonical Operator. Math. Probl. Eng. 2020. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Zhang, C.; Li, T. Some remarks on oscillation of second order neutral differential equations. Appl. Math. Comput. 2016, 274, 178–181. [Google Scholar]
- Euler, L. Institutiones Calculi Integralis, Vol. 2; Opera Omnia I: St. Petersburg, Russia, 1769; pp. 221–230. [Google Scholar]
- Scheffé, H. Linear differential equations with two-term recurrence formulas. J. Math. Phys. 1941, 21, 240–249. [Google Scholar] [CrossRef]
- Shore, S.D. On the second order differential equation which has orthogonal polynomial solutions. Bull. Calcutta Math. Soc. 1964, 56, 195–198. [Google Scholar]
- Hahn, W. On differential equations for orthogonal polynomials. Funkcialaj Ekuacioj 1978, 21, 1–9. [Google Scholar]
- Littlejohn, L.; Shore, S. Nonclassical orthogonal polynomials as solutions to second-order differential equations. Can. Math. Bull. 1982, 25, 291–295. [Google Scholar] [CrossRef]
- Littlejohn, L. On the classification of differential equations having orthogonal polynomial solutions. Ann. Mat. Pura Appl. 1984, 138, 35–53. [Google Scholar] [CrossRef]
- Al-Salam, W.A. Characterization Theorems for orthogonal polynomials. In Orthogonal Polynomials: Theory and Practice; Paul, N., Ed.; Springer: Dordrecht, The Netherlands, 1990. [Google Scholar]
- Atakishiyev, N.M.; Rahman, M.; Suslov, S.K. On classical orthogonal polynomials. Constr. Approx. 1995, 11, 181–226. [Google Scholar] [CrossRef]
- Ronveaux, A. Heun’s Differential Equation; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Maier, R.S. The 192 solutions of the Heun equation. Math. Comput. 2007, 76, 811–843. [Google Scholar] [CrossRef]
- El-Jaick, L.J.; Bartolomeu, D.B.; Figueiredo, D.B. On certain solutions for confluent and double-confluent Heun equations. J. Math. Phys. 2008, 49, 082508. [Google Scholar] [CrossRef] [Green Version]
- Kwon, K.H.; Littlejohn, L.L. Sobolev orthogonal polynomials and second-order differential equations. Rocky Mt. J. Math. 1998, 28, 547–594. [Google Scholar] [CrossRef]
- Everitt, W.N.; Kwon, K.H.; Littlejohn, L.L.; Wellman, R. Orthogonal polynomial solutions of linear ordinary differential equations. J. Comput. Appl. Math. 2001, 133, 85–109. [Google Scholar] [CrossRef] [Green Version]
- Bluman, G.; Dridi, R. New solutions for ordinary differential equations. J. Symb. Comput. 2012, 47, 76–88. [Google Scholar] [CrossRef] [Green Version]
- Routh, E.J. On some properties of certain solutions of a differential equation of the second order. Proc. Lond. Math. Soc. 1884, 1, 245–262. [Google Scholar] [CrossRef] [Green Version]
- Bochner, S. Über Sturm-Liouvillesche Polynomsysteme. Math. Z. 1929, 29, 730–736. [Google Scholar] [CrossRef]
- Slavyanov, S.Y.; Lay, W. Special Functions, A Unified Theory Based on Singularities; Oxford Mathematical Monographs: Oxford, UK, 2000. [Google Scholar]
- Ince, E.L. Ordinary Differential Equations; Dover Publications: Mineola, NY, USA, 1956. [Google Scholar]
- Forsyth, A.R. A Treatise on Differential Equations, 6th ed.; Macmillan: London, UK, 1933. [Google Scholar]
- Ciftci, H.; Hall, R.L.; Saad, N. Asymptotic iteration method for eigenvalue problems. J. Phys. A Math. Gen. 2003, 36, 11807–11816. [Google Scholar] [CrossRef] [Green Version]
- Saad, N.; Hall, R.L.; Ciftci, H. Criterion for polynomial solutions to a class of linear differential equations of second order. J. Phys. A Math. Gen. 2005, 38, 1147. [Google Scholar] [CrossRef] [Green Version]
- Dong, S.-H. Wave Equations in Higher Dimensions; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar]
- Rovder, J. Zeros of the polynomial solutions of the differential equation xy″ + (β0 + β1x + β2x2)y′ + (γ−nβ2x)y = 0. Mat. Căs. 1974, 24, 15. [Google Scholar]


{kind=link}
| i | 3 | 2 | 1 | 0 |
|---|---|---|---|---|
| 1 | c | 0 | ||
| q |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bryenton, K.R.; Cameron, A.R.; Kirk, K.L.A.; Saad, N.; Strongman, P.; Volodin, N. On the Solutions of Second-Order Differential Equations with Polynomial Coefficients: Theory, Algorithm, Application. Algorithms 2020, 13, 286. https://doi.org/10.3390/a13110286
Bryenton KR, Cameron AR, Kirk KLA, Saad N, Strongman P, Volodin N. On the Solutions of Second-Order Differential Equations with Polynomial Coefficients: Theory, Algorithm, Application. Algorithms. 2020; 13(11):286. https://doi.org/10.3390/a13110286
Chicago/Turabian StyleBryenton, Kyle R., Andrew R. Cameron, Keegan L. A. Kirk, Nasser Saad, Patrick Strongman, and Nikita Volodin. 2020. "On the Solutions of Second-Order Differential Equations with Polynomial Coefficients: Theory, Algorithm, Application" Algorithms 13, no. 11: 286. https://doi.org/10.3390/a13110286
APA StyleBryenton, K. R., Cameron, A. R., Kirk, K. L. A., Saad, N., Strongman, P., & Volodin, N. (2020). On the Solutions of Second-Order Differential Equations with Polynomial Coefficients: Theory, Algorithm, Application. Algorithms, 13(11), 286. https://doi.org/10.3390/a13110286