Dynamic Shortest Paths Methods for the Time-Dependent TSP


Abstract
:1. Introduction
1.1. Preliminaries
1.2. Related Work
1.3. Structure of This Paper
2. Complexity
- -
- G has a Hamilton cycle, and therefore, a tour with costs of n exists in D: In this case, the values for are all equal to one, implying that the optimal solution to the TDTSP instance has an arrival time of n. Alg yields a tour with an arrival time of, at most, . Consequently, the first case of (2) is never attained, implying that each arc has a travel time of one, and Alg correctly identifies a Hamiltonian cycle in G.
- -
- G does not possess a Hamiltonian cycle, and every tour has a cost of at least with respect to d: As a result, there must be one arc having a travel time of at least two. If , then T arrives at u at time , and the travel time of , and consequently the arrival time of T is at least M. If, on the other hand, , then T arrives at u at time and arc has a travel time of more than one, which is only possible if , yielding a travel time of M for . In any case, the arrival time of T is at least .
Approximation for Special Cases
3. A Branch-and-Price Algorithm
3.1. An Arc-Based Formulation
Relation to the Static ATSP
3.2. A Path-Based Formulation
3.3. Column Generation
3.3.1. Lagrangean Pricing & Dual Stabilization
3.3.2. Pricing Acyclic Paths
3.4. Valid Inequalities
3.4.1. ATSP Inequalities
3.4.2. Incompatibilites
3.4.3. Odd Path-Free Inequalities
3.4.4. Lifted Subtour Elimination Inequalities
3.4.5. Cycle Inequalities
- The arcs form a k-cycle C not containing s.
- The arc a enters the cycle C, that is, .
3.4.6. Unitary AFCs
3.5. Additional Techniques
3.5.1. Propagation
3.5.2. Compound Branching
3.5.3. Primal Heuristics
- -
- The inverse of the travel time (breaking ties arbitrarily);
- -
- The variable value of using travel times to break ties or
- -
- The compound value using the same tie-breaking rule.
4. Computational Experiments
4.1. Instances
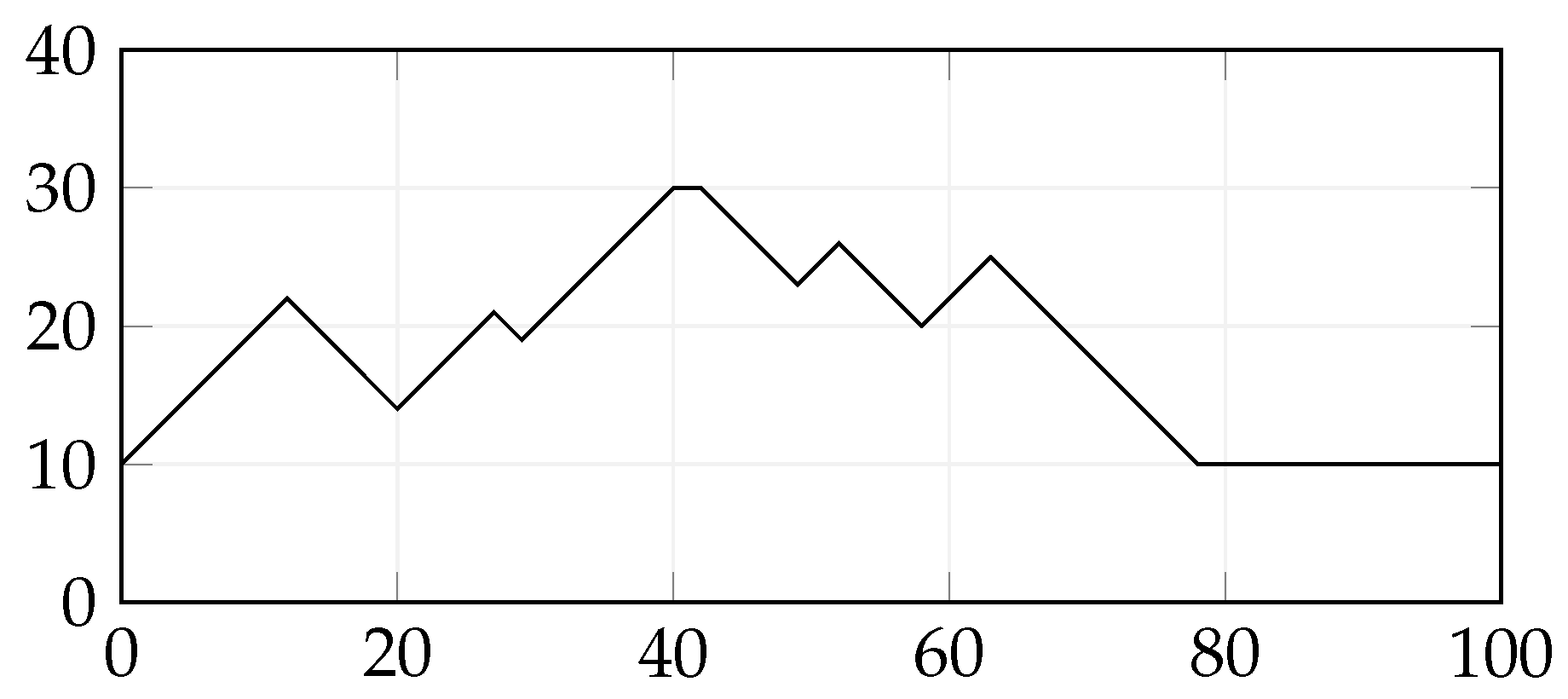
- We let and fix the slope at zero to .
- The slope alternates between and with break points at for .
4.2. Computational Results
4.2.1. Comparisons between Formulations
4.2.2. Performance of Different Pricers
4.2.3. Impact of Valid Inequalities
4.2.4. Performance of Primal Heuristics
4.2.5. Final Algorithm
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Time-Dependent Spanning Trees


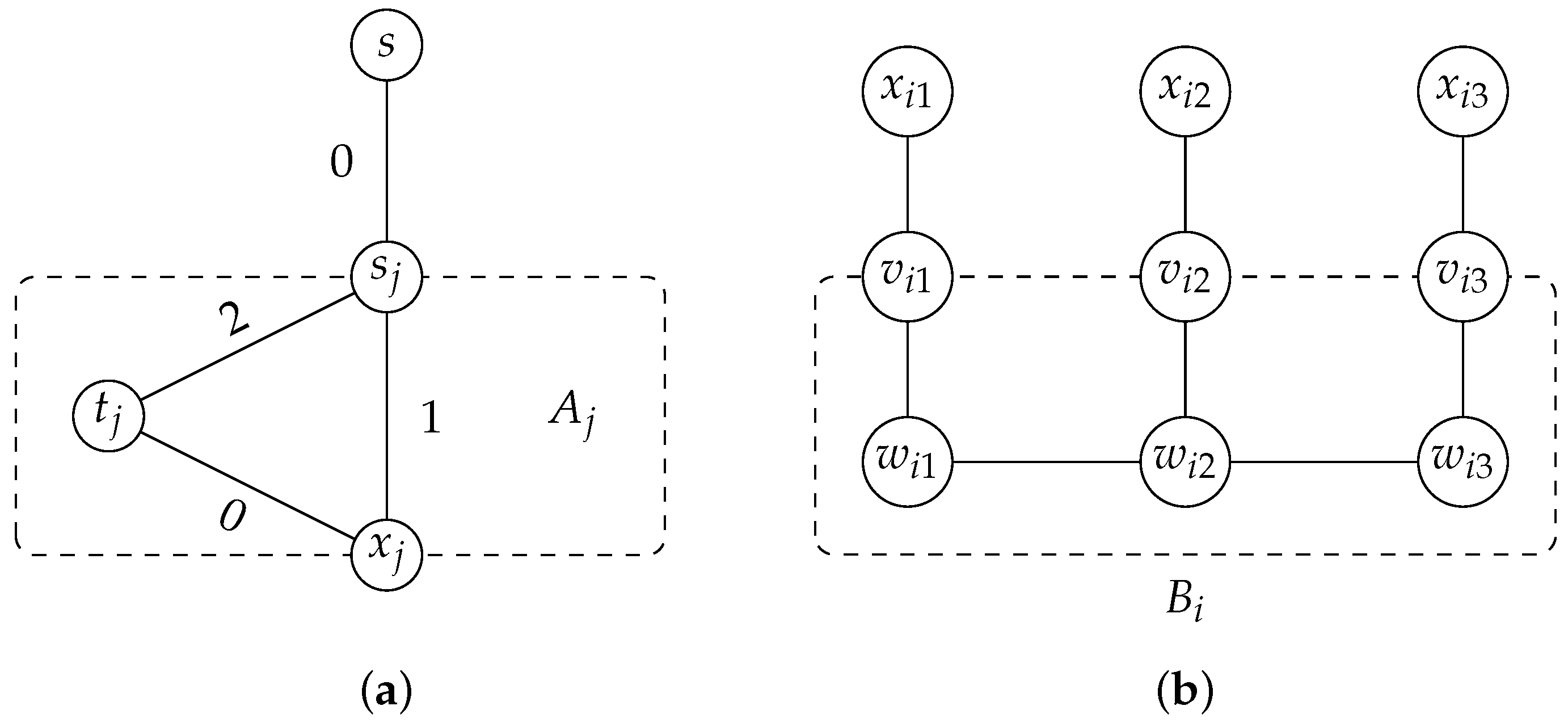
- The edges and have a constant travel time of 1.
- The edge has a travel time ofThe same holds true for the edges and .
- The travel time of the edge connecting and depends on whether or appears in the clause . In the former case the travel time is constantly 1, whereas in the latter it is given by
References
- Applegate, D.L.; Bixby, R.E.; Chvatal, V.; Cook, W.J. The Traveling Salesman Problem: A Computational Study; Princeton University Press: Princeton, NJ, USA, 2011. [Google Scholar]
- Gutin, G.; Punnen, A.P. The Traveling Salesman Problem and Its Variations; Springer: Berlin, Germany, 2006; Volume 12. [Google Scholar]
- Helsgaun, K. An effective implementation of the Lin–Kernighan traveling salesman heuristic. Eur. J. Oper. Res. 2000, 126, 106–130. [Google Scholar] [CrossRef] [Green Version]
- McMenemy, P.; Veerapen, N.; Adair, J.; Ochoa, G. Rigorous Performance Analysis of State-of-the-Art TSP Heuristic Solvers. In European Conference on Evolutionary Computation in Combinatorial Optimization (Part of EvoStar); Springer: Berlin, Germany, 2019; pp. 99–114. [Google Scholar] [CrossRef] [Green Version]
- Batz, G.V.; Delling, D.; Sanders, P.; Vetter, C. Time-Dependent Contraction Hierarchies. In Proceedings of the 2009 Eleventh Workshop on Algorithm Engineering and Experiments (ALENEX), New York, NY, USA, 3 January 2009; pp. 97–105. [Google Scholar] [CrossRef] [Green Version]
- Kaufman, D.E.; Smith, R.L. Fastest paths in time-dependent networks for intelligent vehicle-highway systems applications. J. Intell. Transp. Syst. 1993, 1, 1–11. [Google Scholar] [CrossRef]
- Delling, D.; Wagner, D. Time-Dependent Route Planning. Robust Online Large-Scale Optim. 2009, 5868, 207–230. [Google Scholar] [CrossRef] [Green Version]
- Rosenkrantz, D.J.; Stearns, R.E.; Philip, M.; Lewis, I. An Analysis of Several Heuristics for the Traveling Salesman Problem. SIAM J. Comput. 1977, 6, 563–581. [Google Scholar] [CrossRef]
- Christofides, N. Worst-Case Analysis of a New Heuristic for the Travelling Salesman Problem; Technical Report; Carnegie-Mellon Univ. Pittsburgh Pa Management Sciences Research Group: Pittsburgh, PA, USA, 1976. [Google Scholar]
- Ascheuer, N.; Fischetti, M.; Grötschel, M. A Polyhedral Study of the Asymmetric Traveling Salesman Problem with Time Windows. Networks 2000, 36, 69–79. [Google Scholar] [CrossRef]
- Ascheuer, N.; Fischetti, M.; Grötschel, M. Solving the Asymmetric Travelling Salesman Problem with time windows by branch-and-cut. Math. Program. 2001, 90, 475–506. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The Vehicle Routing Problem; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Fukasawa, R.; Barboza, A.S.; Toriello, A. On the Strength of Approximate Linear Programming Relaxations for the Traveling Salesman Problem. Available online: www2.isye.gatech.edu/~atoriello3/bcpalp.pdf (accessed on 2 October 2020).
- Fukasawa, R.; Longo, H.; Lysgaard, J.; De Aragão, M.P.; Reis, M.; Uchoa, E.; Werneck, R.F. Robust Branch-and-Cut-and-Price for the Capacitated Vehicle Routing Problem. Math. Program. 2006, 106, 491–511. [Google Scholar] [CrossRef]
- Abeledo, H.; Fukasawa, R.; Pessoa, A.; Uchoa, E. The time dependent traveling salesman problem: Polyhedra and algorithm. Math. Program. Comput. 2013, 5, 27–55. [Google Scholar] [CrossRef] [Green Version]
- Dantzig, G.; Fulkerson, R.; Johnson, S. Solution of a large-scale traveling-salesman problem. J. Oper. Res. Soc. Am. 1954, 2, 393–410. [Google Scholar] [CrossRef]
- Irnich, S.; Villeneuve, D. The Shortest-Path Problem with Resource Constraints and k-Cycle Elimination for k ≥ 3. INFORMS J. Comput. 2006, 18, 391–406. [Google Scholar] [CrossRef] [Green Version]
- Roberti, R.; Mingozzi, A. Dynamic ng-Path Relaxation for the Delivery Man Problem. Transp. Sci. 2014, 48, 413–424. [Google Scholar] [CrossRef]
- Picard, J.C.; Queyranne, M. The Time-Dependent Traveling Salesman Problem and its Application to the Tardiness Problem in One-Machine Scheduling. Oper. Res. 1978, 26, 86–110. [Google Scholar] [CrossRef]
- Bigras, L.P.; Gamache, M.; Savard, G. The time-dependent traveling salesman problem and single machine scheduling problems with sequence dependent setup times. Discret. Optim. 2008, 5, 685–699. [Google Scholar] [CrossRef] [Green Version]
- Ángel-Bello, F.; Cardona-Valdés, Y.; Álvarez, A. Mixed integer formulations for the multiple minimum latency problem. Oper. Res. 2019, 19, 369–398. [Google Scholar] [CrossRef]
- Pessoa, A.; Uchoa, E.; de Aragão, M.P.; Rodrigues, R. Exact algorithm over an arc-time-indexed formulation for parallel machine scheduling problems. Math. Program. Comput. 2010, 2, 259–290. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Ghiani, G.; Guerriero, E. Analysis and Branch-and-Cut Algorithm for the Time-Dependent Travelling Salesman Problem. Transp. Sci. 2014, 48, 46–58. [Google Scholar] [CrossRef] [Green Version]
- Arigliano, A.; Calogiuri, T.; Ghiani, G.; Guerriero, E. A branch-and-bound algorithm for the time-dependent travelling salesman problem. Networks 2018, 72, 382–392. [Google Scholar] [CrossRef]
- Ichoua, S.; Gendreau, M.; Potvin, J.Y. Vehicle dispatching with time-dependent travel times. Eur. J. Oper. Res. 2003, 144, 379–396. [Google Scholar] [CrossRef] [Green Version]
- Vu, D.M.; Hewitt, M.; Boland, N.; Savelsbergh, M. Dynamic Discretization Discovery for Solving the Time-Dependent Traveling Salesman Problem with Time Windows. Transp. Sci. 2020, 54, 703–720. [Google Scholar] [CrossRef]
- Boland, N.L.; Savelsbergh, M.W. Perspectives on integer programming for time-dependent models. TOP 2019, 27, 147–173. [Google Scholar] [CrossRef]
- Hansknecht, C.; Joormann, I.; Stiller, S. Cuts, Primal Heuristics, and Learning to Branch for the Time-Dependent Traveling Salesman Problem. arXiv 2018, arXiv:1805.01415. [Google Scholar]
- Korte, B.; Vygen, J. Combinatorial Optimization: Theory and Algorithms; Springer: Berlin, Germany, 2012. [Google Scholar] [CrossRef]
- Held, M.; Karp, R.M. A Dynamic Programming Approach to Sequencing Problems. J. Soc. Ind. Appl. Math. 1962, 10, 196–210. [Google Scholar] [CrossRef]
- Held, M.; Karp, R.M. The traveling-salesman problem and minimum spanning trees. Oper. Res. 1970, 18, 1138–1162. [Google Scholar] [CrossRef]
- Gouveia, L.; Voß, S. A classification of formulations for the (time-dependent) traveling salesman problem. Eur. J. Oper. Res. 1995, 83, 69–82. [Google Scholar] [CrossRef]
- Lübbecke, M.E.; Desrosiers, J. Selected Topics in Column Generation. Oper. Res. 2005, 53, 1007–1023. [Google Scholar] [CrossRef]
- Grötschel, M.; Padberg, M.W. Lineare Charakterisierungen von Travelling Salesman Problemen. Z. Oper. Res. 1977, 21, 33–64. [Google Scholar] [CrossRef]
- Atamtürk, A.; Nemhauser, G.L.; Savelsbergh, M.W. Conflict graphs in solving integer programming problems. Eur. J. Oper. Res. 2000, 121, 40–55. [Google Scholar] [CrossRef]
- Balas, E. The Asymmetric Assignment Problem and Some New Facets of the Traveling Salesman Polytope on a Directed Graph. SIAM J. Discret. Math. 1989, 2, 425–451. [Google Scholar] [CrossRef]
- Miranda-Bront, J.J.; Méndez-Díaz, I.; Zabala, P. Facets and valid inequalities for the time-dependent travelling salesman problem. Eur. J. Oper. Res. 2014, 236, 891–902. [Google Scholar] [CrossRef]
- Achterberg, T. SCIP: Solving constraint integer programs. Math. Program. Comput. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual; Gurobi Optimization, LLC: Beaverton, OR, USA, 2020. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance | (TDTSP-A) | (TDTSP-A) with Pricing | (TDTSP-P) with Pricing | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| p | d | g | n | p | d | g | n | p | d | g | n | ||||
| 1 | 759 | 439.85 | 0.73 | 1 | 3384.62 | 759 | 447.77 | 0.70 | 33 | 32.90 | 759 | 443.94 | 0.71 | 7 | 13.96 |
| 2 | 952 | 566.09 | 0.68 | 1 | 3426.43 | 952 | 579.02 | 0.64 | 25 | 54.04 | 952 | 565.64 | 0.68 | 3 | 20.50 |
| 3 | 733 | 471.61 | 0.55 | 1 | – | 733 | 471.23 | 0.56 | 28 | 36.62 | 733 | 470.51 | 0.56 | 5 | 11.41 |
| 4 | 962 | 492.88 | 0.95 | 1 | 3438.55 | 962 | 499.10 | 0.93 | 24 | 75.91 | 962 | 490.63 | 0.96 | 4 | 19.06 |
| 5 | 764 | 508.43 | 0.50 | 1 | – | 764 | 501.86 | 0.52 | 35 | 40.97 | 764 | 494.42 | 0.55 | 4 | 16.06 |
| 6 | 818 | 526.35 | 0.55 | 1 | 3495.04 | 818 | 527.73 | 0.55 | 21 | 32.48 | 818 | 525.38 | 0.56 | 4 | 13.49 |
| 7 | 745 | 518.59 | 0.44 | 1 | 3468.89 | 745 | 522.99 | 0.42 | 29 | 49.53 | 745 | 522.35 | 0.43 | 8 | 11.66 |
| 8 | 772 | 492.36 | 0.57 | 1 | – | 772 | 483.32 | 0.60 | 23 | 41.59 | 772 | 476.44 | 0.62 | 4 | 20.80 |
| 9 | 786 | 576.16 | 0.36 | 1 | – | 786 | 577.25 | 0.36 | 32 | 39.56 | 786 | 577.23 | 0.36 | 9 | 12.81 |
| 10 | 897 | 535.59 | 0.67 | 1 | 3392.87 | 897 | 543.79 | 0.65 | 24 | 42.06 | 897 | 532.30 | 0.69 | 5 | 15.16 |
| 11 | 794 | 497.36 | 0.60 | 1 | 3450.85 | 794 | 496.43 | 0.60 | 26 | 64.05 | 794 | 495.94 | 0.60 | 8 | 17.17 |
| 12 | 854 | 509.18 | 0.68 | 1 | 3411.36 | 854 | 518.79 | 0.65 | 21 | 49.47 | 854 | 513.38 | 0.66 | 4 | 13.15 |
| 13 | 870 | 553.34 | 0.57 | 1 | – | 870 | 553.83 | 0.57 | 22 | 36.36 | 870 | 551.60 | 0.58 | 4 | 16.52 |
| 14 | 771 | 520.03 | 0.48 | 1 | 3460.53 | 771 | 523.41 | 0.47 | 32 | 44.75 | 771 | 517.18 | 0.49 | 11 | 10.82 |
| 15 | 721 | 543.23 | 0.33 | 1 | – | 721 | 548.23 | 0.32 | 35 | 29.64 | 721 | 544.67 | 0.32 | 15 | 9.84 |
| 16 | 767 | 535.25 | 0.43 | 1 | 3505.49 | 767 | 545.93 | 0.40 | 25 | 44.69 | 767 | 545.51 | 0.41 | 7 | 12.48 |
| 17 | 751 | 459.39 | 0.63 | 1 | 3256.30 | 751 | 459.52 | 0.63 | 32 | 37.10 | 751 | 457.83 | 0.64 | 5 | 12.65 |
| 18 | 799 | 528.77 | 0.51 | 1 | 3405.66 | 799 | 545.27 | 0.47 | 26 | 67.33 | 799 | 531.38 | 0.50 | 8 | 17.77 |
| 19 | 800 | 503.82 | 0.59 | 1 | 3460.39 | 800 | 512.01 | 0.56 | 32 | 66.72 | 800 | 505.73 | 0.58 | 5 | 20.77 |
| 20 | 822 | 566.01 | 0.45 | 1 | 3310.60 | 822 | 584.36 | 0.41 | 34 | 77.51 | 822 | 564.98 | 0.45 | 4 | 16.15 |
| Running Time [s] | Relative Gap | ||||
|---|---|---|---|---|---|
| k | Small | Large | Small | Large | |
| Original | 1.14 | 18.57 | 0.43 | 0.57 | |
| arc-based, k-cycle-free | 2 | 1.28 | 23.39 | 0.32 | 0.45 |
| 3 | 69.44 | 1960.60 | 0.28 | 0.40 | |
| 4 | 1706.55 | – | 0.26 | – | |
| path-based, k-cycle-free | 2 | 7.38 | 38.19 | 0.31 | 0.43 |
| 3 | 1203.36 | – | 0.26 | – | |
| path-based, stabilized, k-cycle-free | 2 | 4.22 | 54.44 | 0.31 | 0.43 |
| 3 | 585.13 | – | 0.26 | – | |
| Running Time [s] | Relative Gap | ||||
|---|---|---|---|---|---|
| Small | Large | Small | Large | ||
| Original | 1.14 | 18.57 | 0.43 | 0.57 | |
| Separator | Cycle | 5.66 | 107.12 | 0.38 | 0.54 |
| 6.19 | 286.34 | 0.33 | 0.45 | ||
| LSEC | 9.41 | 378.85 | 0.29 | 0.43 | |
| Odd CAT | 4.05 | 152.71 | 0.39 | 0.52 | |
| Odd path-free | 5.06 | 87.30 | 0.41 | 0.56 | |
| SEC | 9.38 | 373.89 | 0.30 | 0.43 | |
| unitary AFC | 23.43 | 263.34 | 0.38 | 0.55 | |
| LSEC and | 10.16 | 484.12 | 0.29 | 0.42 | |
| Running Time [s] | Relative Gap | ||||
|---|---|---|---|---|---|
| Small | Large | Small | Large | ||
| Original | 1.14 | 18.57 | 0.43 | 0.57 | |
| Heuristic | Compound value | 2.53 | 47.93 | 0.30 | 0.53 |
| Inverted travel time | 2.34 | 45.22 | 0.37 | 0.53 | |
| Variable value | 1.99 | 46.38 | 0.37 | 0.50 | |
| Instance | Full Formulation | Gurobi | |||||||
|---|---|---|---|---|---|---|---|---|---|
| p | d | g | n | p | d | g | n | ||
| 1 | 627 | 527.08 | 0.19 | 18 | 775.79 | 676 | 444 | 0.52 | 1 |
| 2 | 832 | 644.08 | 0.29 | 10 | 763.66 | 952 | 566 | 0.68 | 1 |
| 3 | 660 | 551.06 | 0.20 | 26 | 296.38 | 733 | 476 | 0.54 | 3 |
| 4 | 740 | 609.09 | 0.21 | 8 | 1950.61 | 818 | 494 | 0.66 | 1 |
| 5 | 714 | 609.00 | 0.17 | 22 | 348.29 | 764 | 502 | 0.52 | 3 |
| 6 | 723 | 599.49 | 0.21 | 17 | 710.42 | 765 | 529 | 0.45 | 1 |
| 7 | 667 | 571.00 | 0.17 | 28 | 273.41 | 612 | 522 | 0.17 | 1 |
| 8 | 682 | 573.00 | 0.19 | 17 | 593.06 | 772 | 482 | 0.60 | 3 |
| 9 | 700 | 612.00 | 0.14 | 27 | 199.94 | 786 | 583 | 0.35 | 1 |
| 10 | 753 | 637.00 | 0.18 | 18 | 800.22 | 897 | 533 | 0.68 | 1 |
| 11 | 659 | 579.02 | 0.14 | 16 | 302.16 | 793 | 499 | 0.59 | 1 |
| 12 | 749 | 606.71 | 0.23 | 11 | 936.39 | 854 | 509 | 0.68 | 1 |
| 13 | 779 | 634.00 | 0.23 | 17 | 693.32 | 805 | 561 | 0.44 | 1 |
| 14 | 744 | 600.29 | 0.24 | 21 | 415.43 | 746 | 520 | 0.44 | 1 |
| 15 | 701 | 607.08 | 0.15 | 31 | 201.47 | 721 | 546 | 0.32 | 1 |
| 16 | 721 | 608.00 | 0.19 | 11 | 922.34 | 767 | 545 | 0.41 | 1 |
| 17 | 688 | 548.00 | 0.26 | 15 | 551.36 | 751 | 464 | 0.62 | 2 |
| 18 | 645 | 593.49 | 0.09 | 14 | 496.26 | 799 | 532 | 0.50 | 1 |
| 19 | 742 | 571.00 | 0.30 | 12 | 809.39 | 800 | 511 | 0.57 | 1 |
| 20 | 773 | 622.59 | 0.24 | 21 | 464.79 | 803 | 566 | 0.42 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hansknecht, C.; Joormann, I.; Stiller, S. Dynamic Shortest Paths Methods for the Time-Dependent TSP. Algorithms 2021, 14, 21. https://doi.org/10.3390/a14010021
Hansknecht C, Joormann I, Stiller S. Dynamic Shortest Paths Methods for the Time-Dependent TSP. Algorithms. 2021; 14(1):21. https://doi.org/10.3390/a14010021
Chicago/Turabian StyleHansknecht, Christoph, Imke Joormann, and Sebastian Stiller. 2021. "Dynamic Shortest Paths Methods for the Time-Dependent TSP" Algorithms 14, no. 1: 21. https://doi.org/10.3390/a14010021
APA StyleHansknecht, C., Joormann, I., & Stiller, S. (2021). Dynamic Shortest Paths Methods for the Time-Dependent TSP. Algorithms, 14(1), 21. https://doi.org/10.3390/a14010021