
Three-Dimensional Elastodynamic Analysis Employing Partially Discontinuous Boundary Elements




Abstract
:1. Introduction
- (1)
- (2)
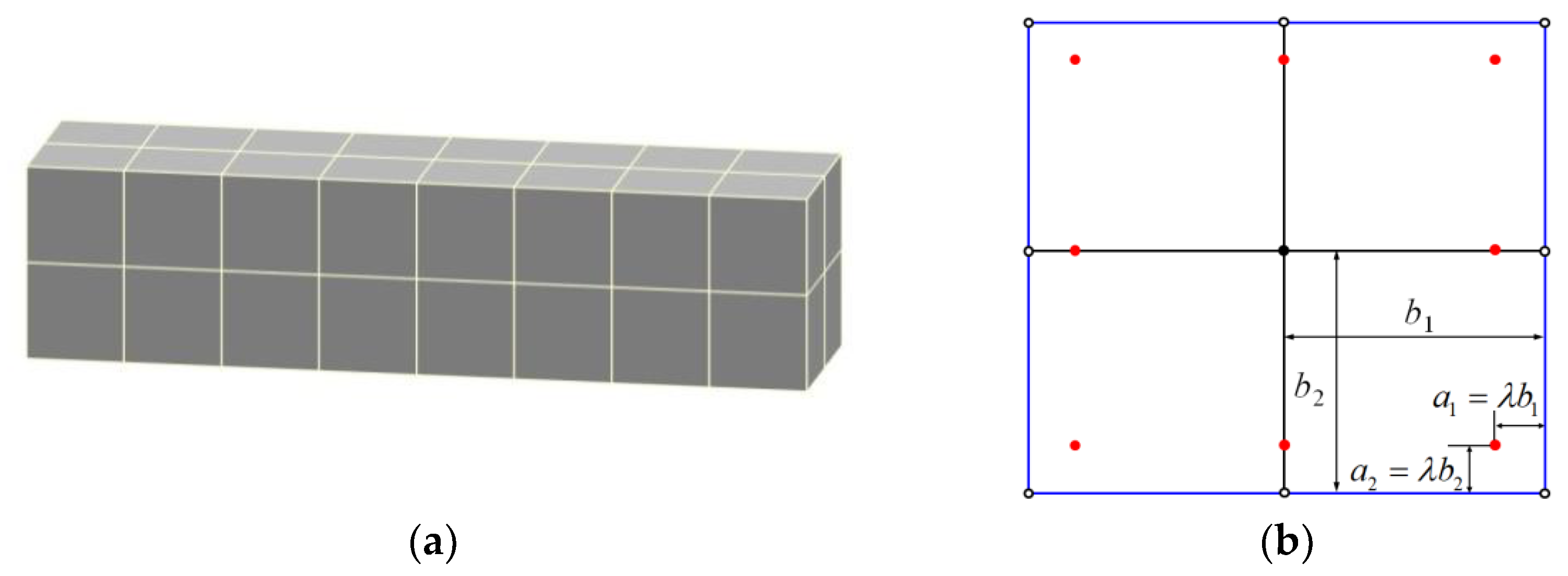
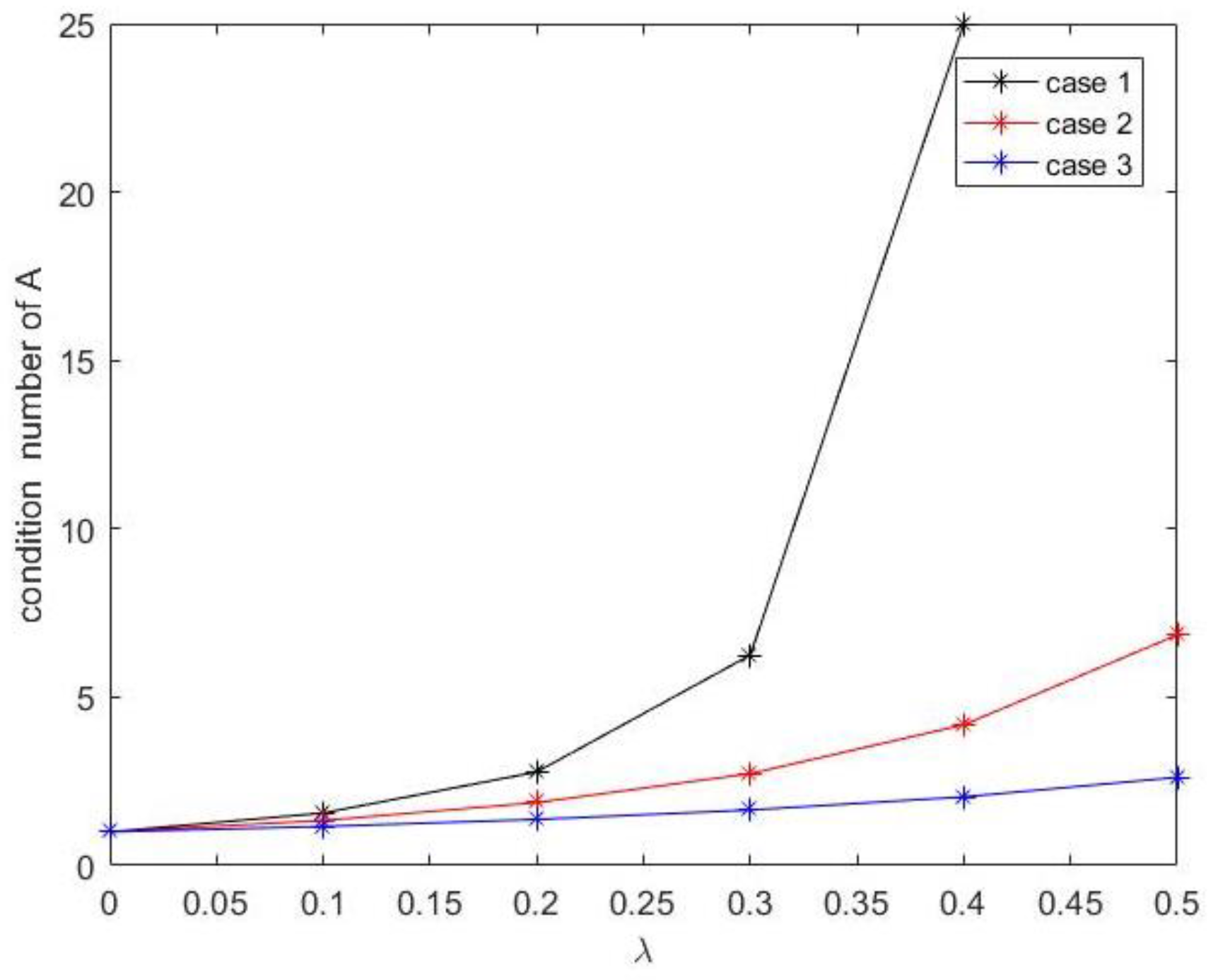
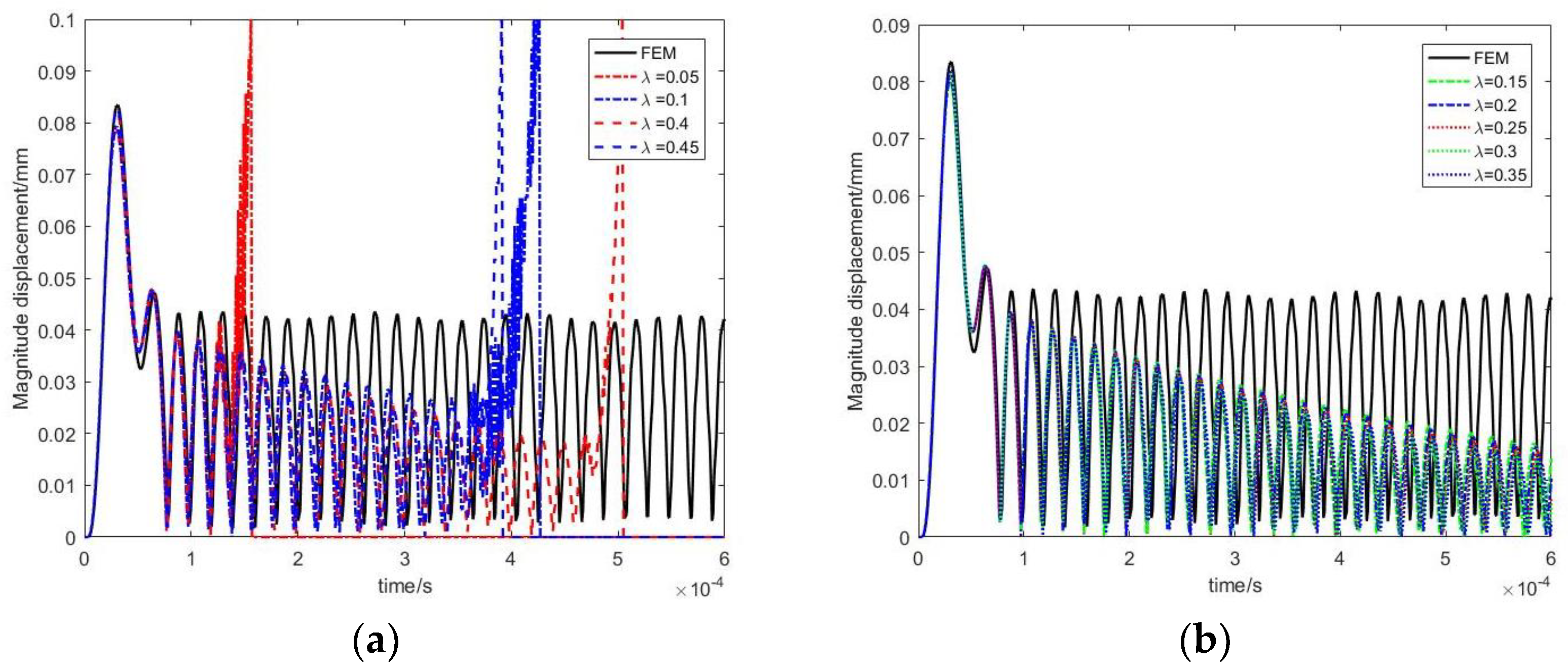
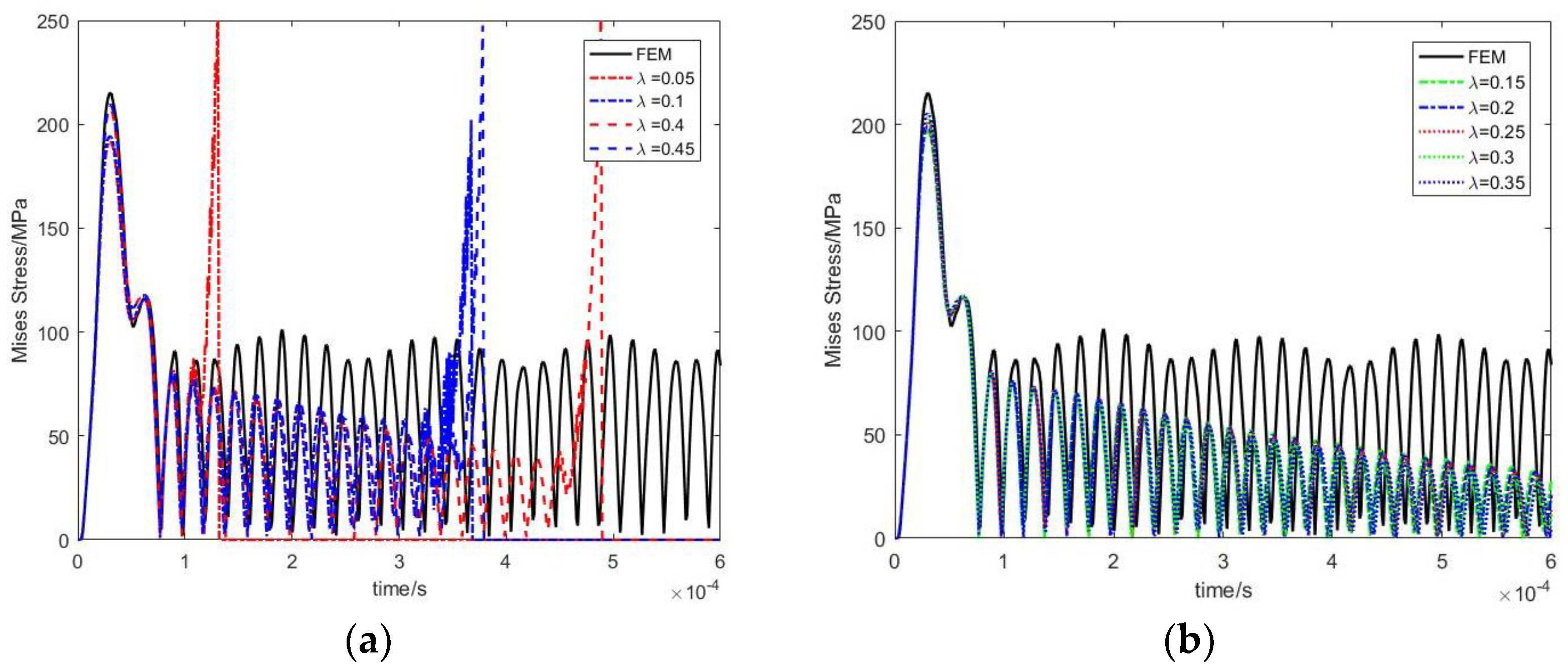
- The influence of the node position of the partially discontinuous elements on the computational accuracy and result stability is studied through two classical numerical examples. The recommended value range of the inward shift ratio of the element node is provided.
2. Time-Domain Boundary Integral Equation of Elastodynamics and Its Numerical Implementation
2.1. Time-Domain Boundary Integral Equation
- i and j represent the three directions of the 3D space;
- ui represents the displacement component;
- pi represents the traction component in the i direction;
- bi represents the body force per mass;
- is the first-order derivative of displacement ui versus time t;
- is the second-order derivative of displacement ui versus time t;
- and represent the boundary displacement on and the boundary traction on , respectively, where the whole boundary ;
- V represents the whole domain of the analysis object;
- ρ is the medium density;
- λ and G are the Lame constants given bywhere E and ν represent Young’s modulus and Poisson’s ratio, respectively.
- when the source point p is located on smooth surfaces, and when the source point p is located in the domain ( when , otherwise );
- and are the time-dependent displacement fundamental solution and the traction fundamental solution, respectively, whose expressions can be found in [23];
- represents the velocity fundamental solution, which is the first-order derivative of versus time.
2.2. Numerical Implementation of the BIE
3. Numerical Integration Scheme of the Partially Discontinuous Element and the Treatment of the Singular Integral
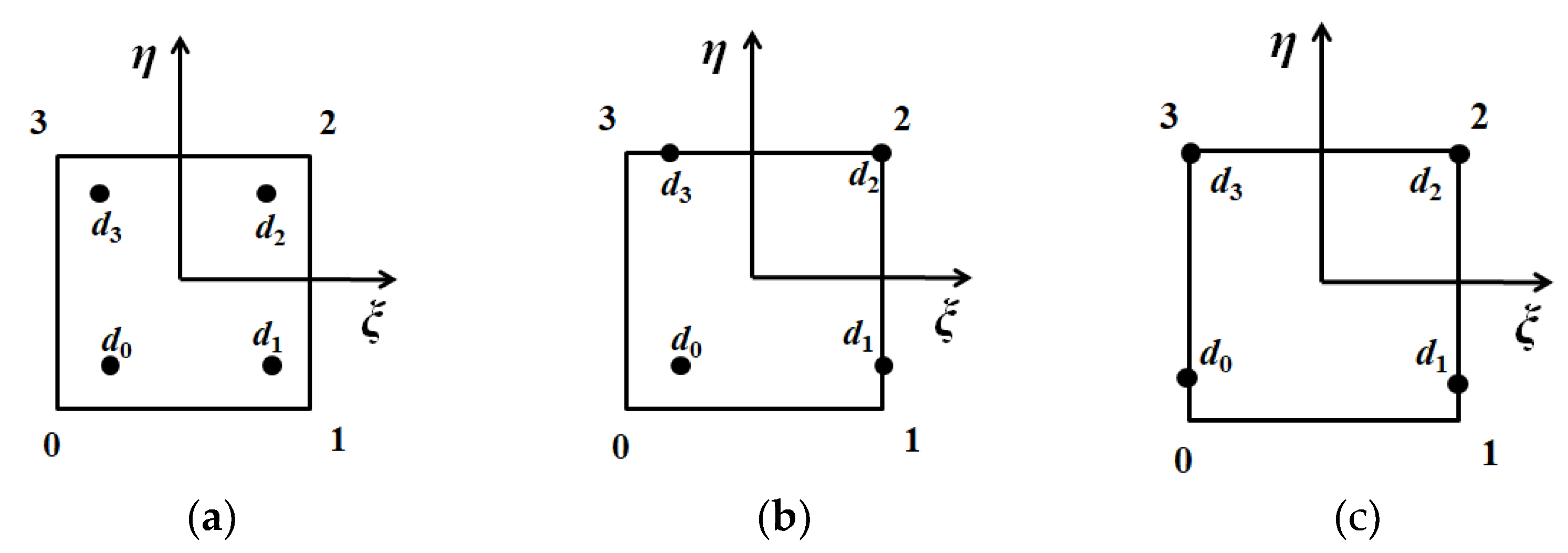
3.1. Numerical Integration Scheme
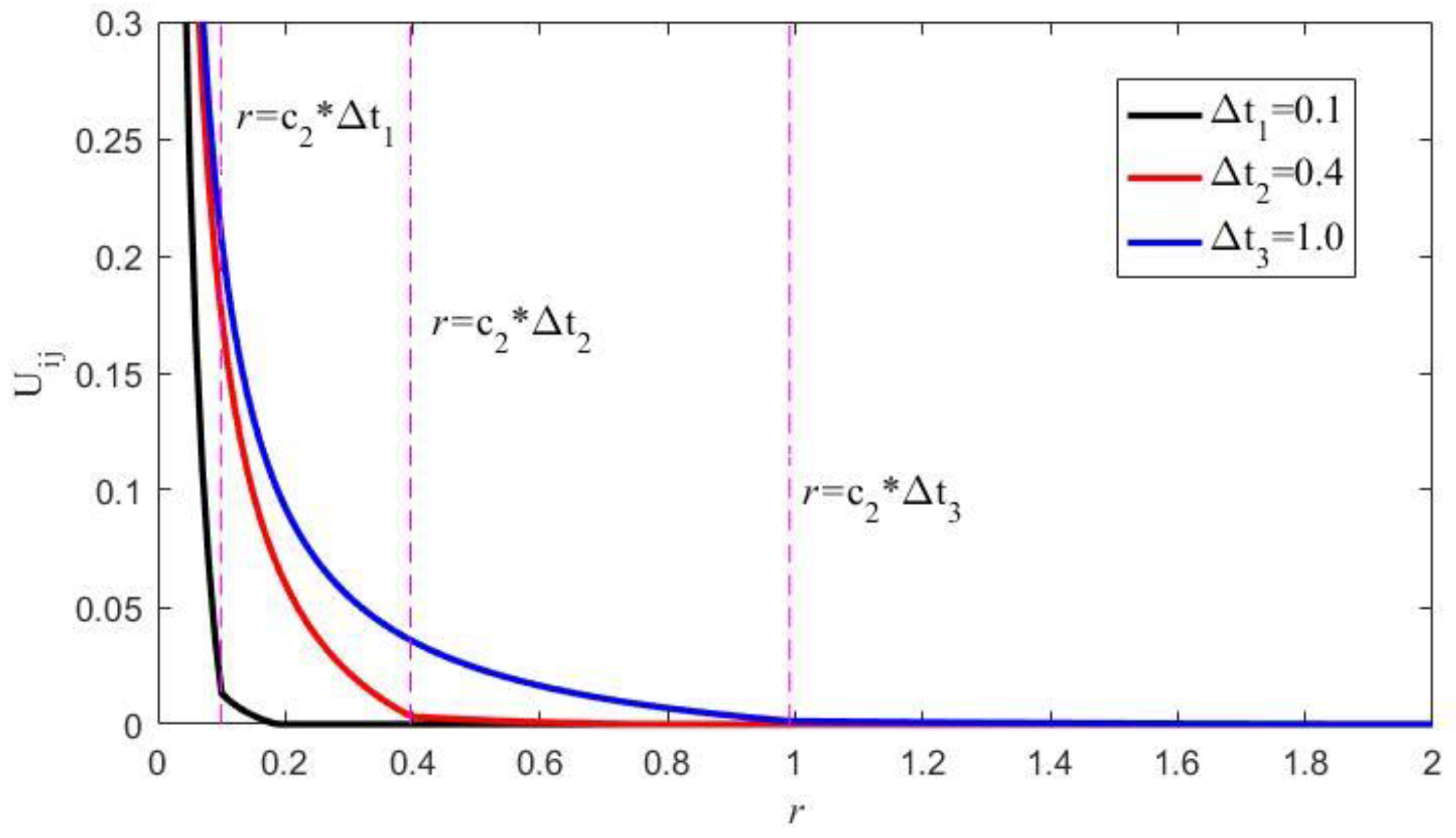
3.2. Singular Integral
- (1)
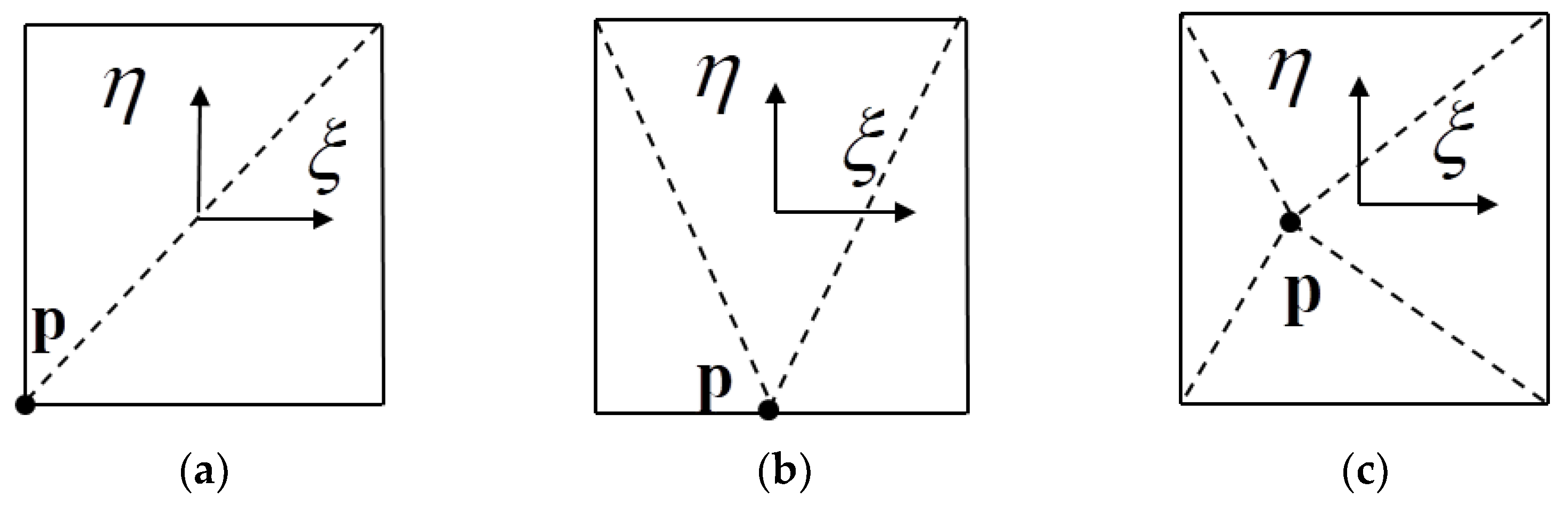
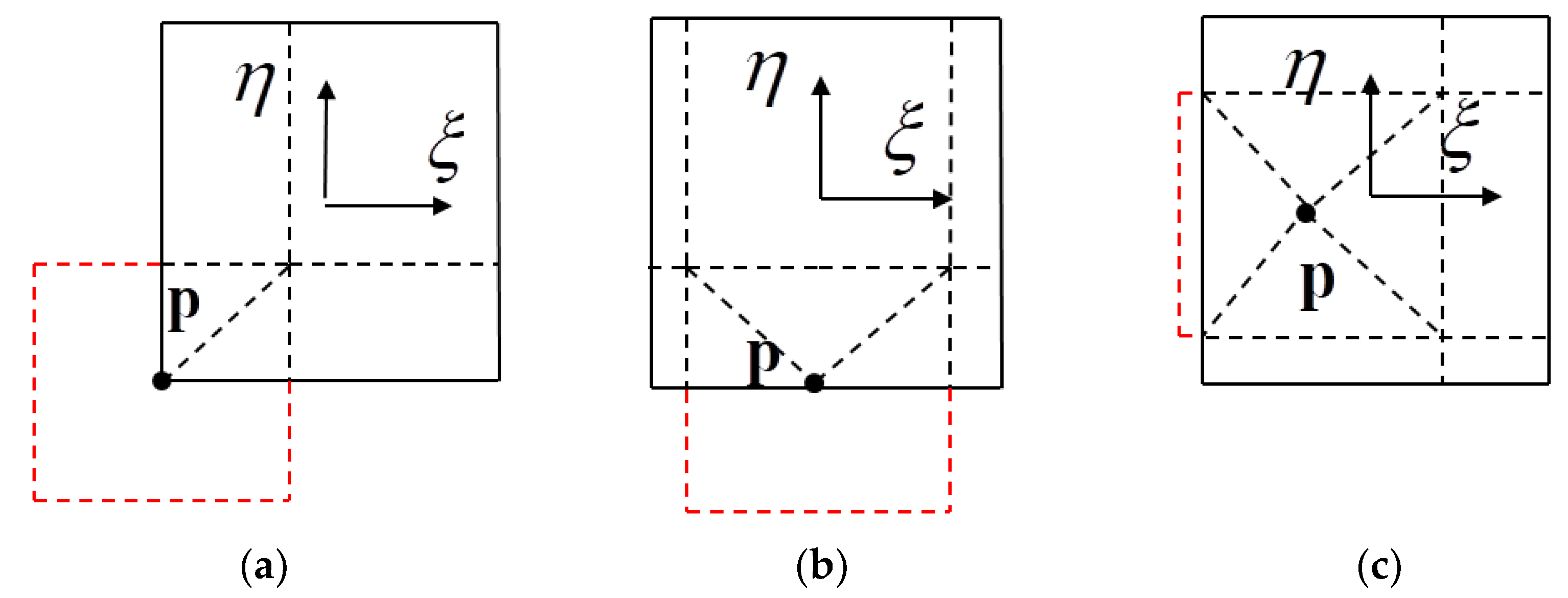
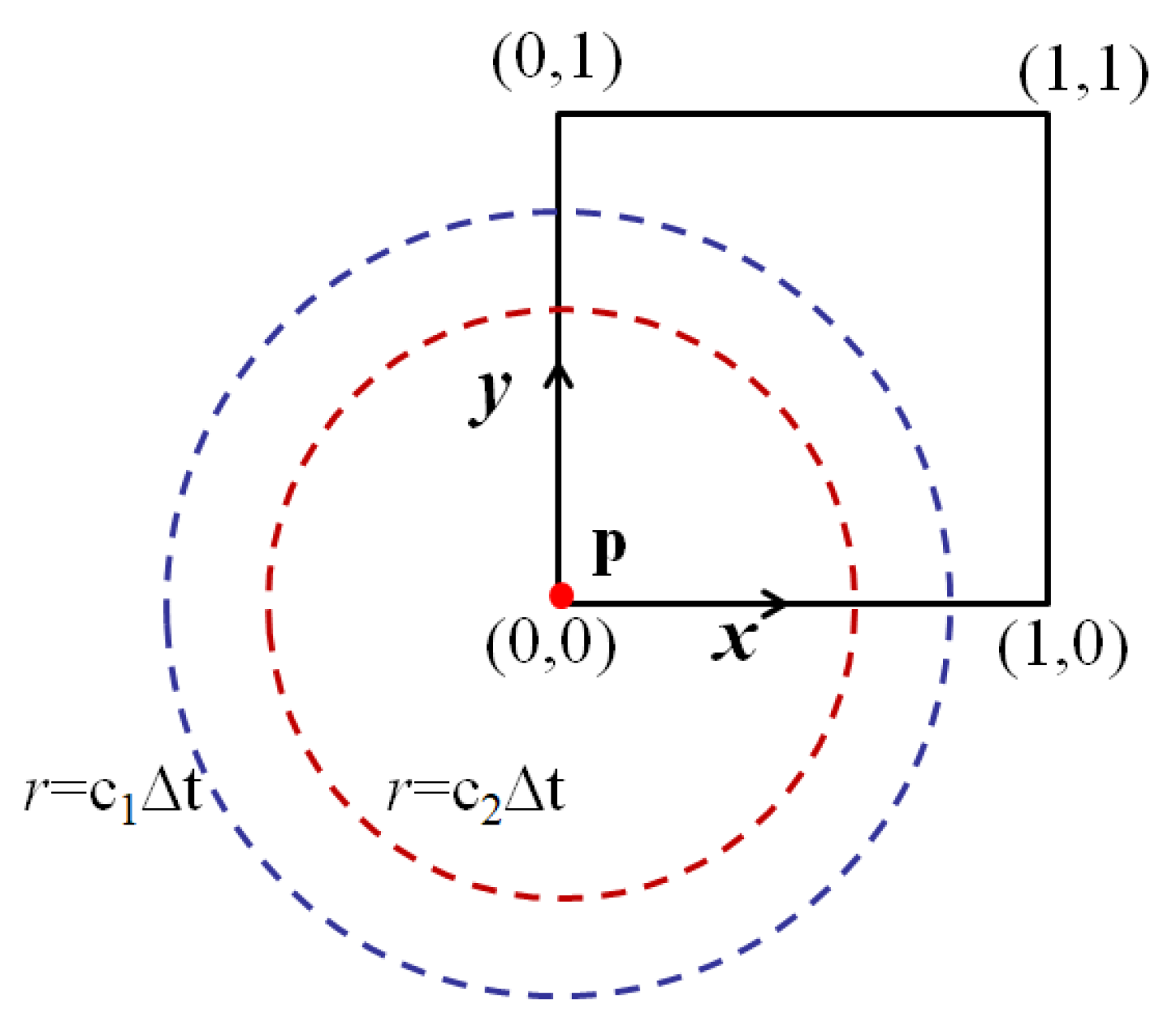
- Create a square with the source point p as the center and 2 c2Δt as the side length. If the square exceeds the boundary of the element (as shown by the red dashed lines in Figure 6), the boundary of the element is taken as the boundary of the square;
- (2)
- According to the position of the source point p and the square area established, the element is subdivided into several triangular patches containing p and quadrilateral patches without p, as shown by the black dashed lines in Figure 6;
- (3)
- The α–β transformation method is used for integrals on the triangular patches, and the standard Gauss–Legendre quadrature method is used on the quadrilateral patches.
4. Numerical Examples
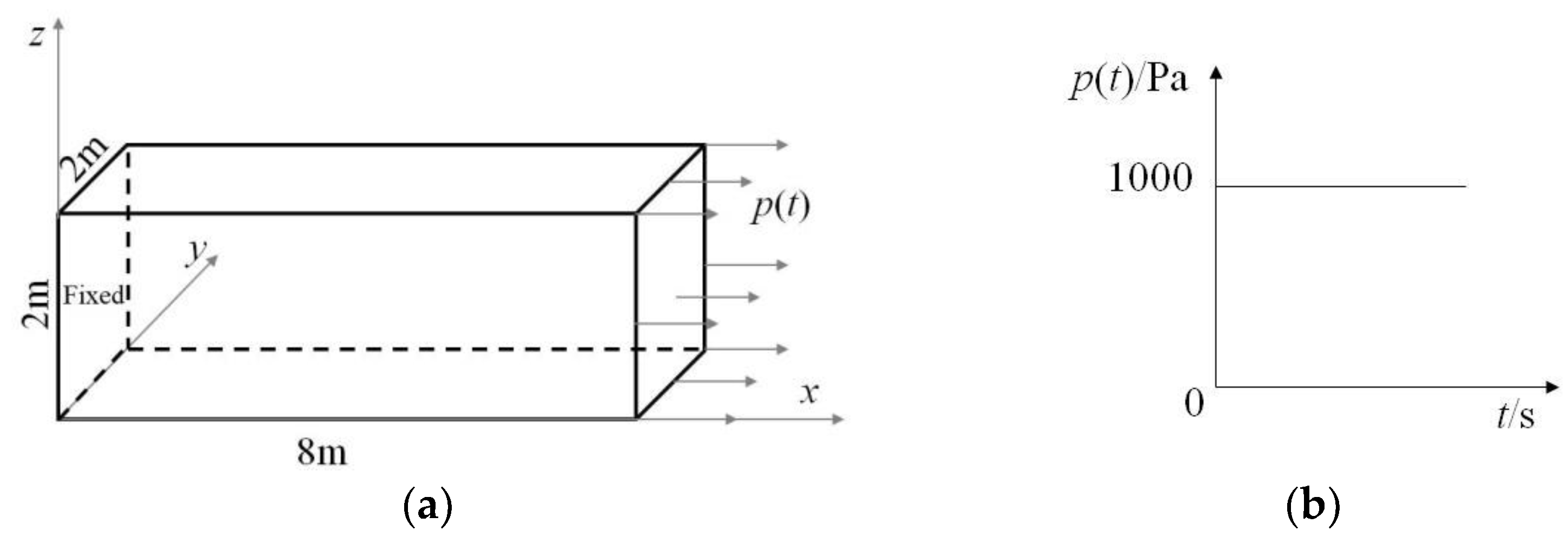
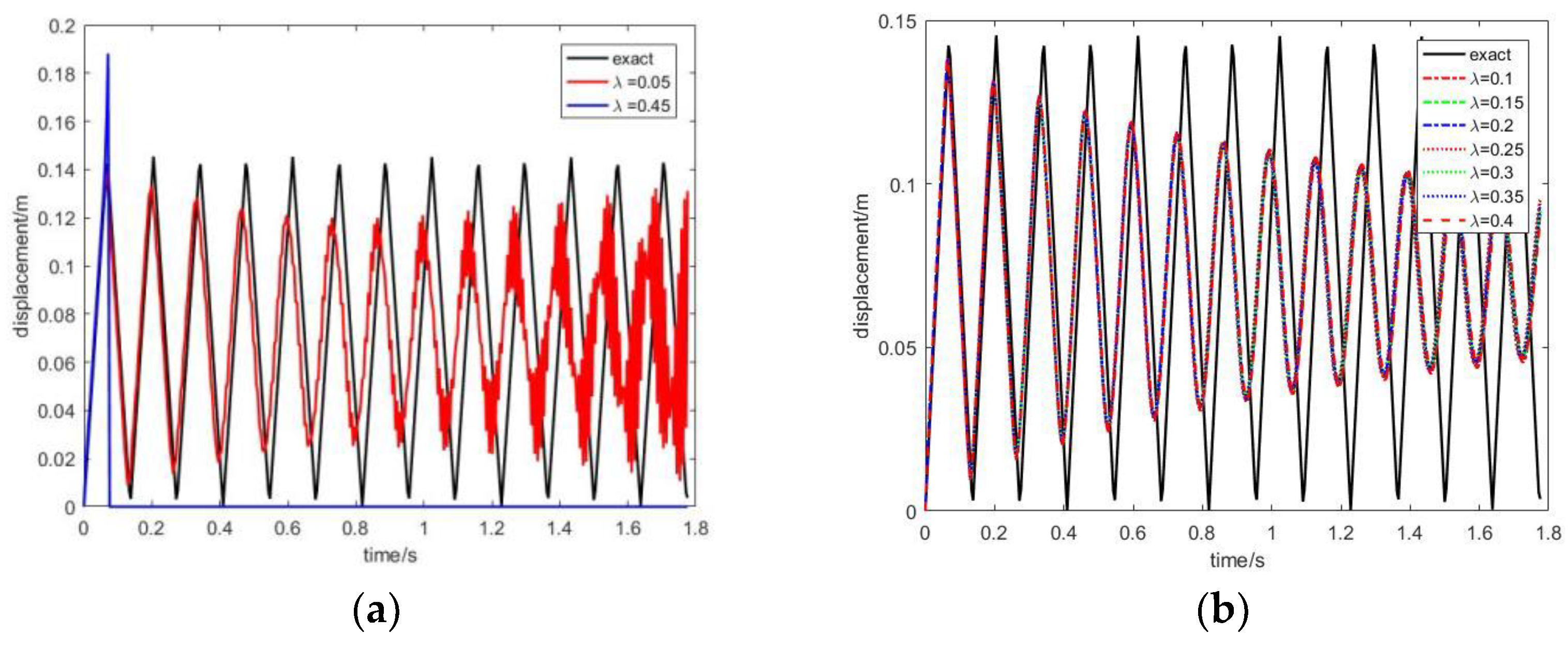
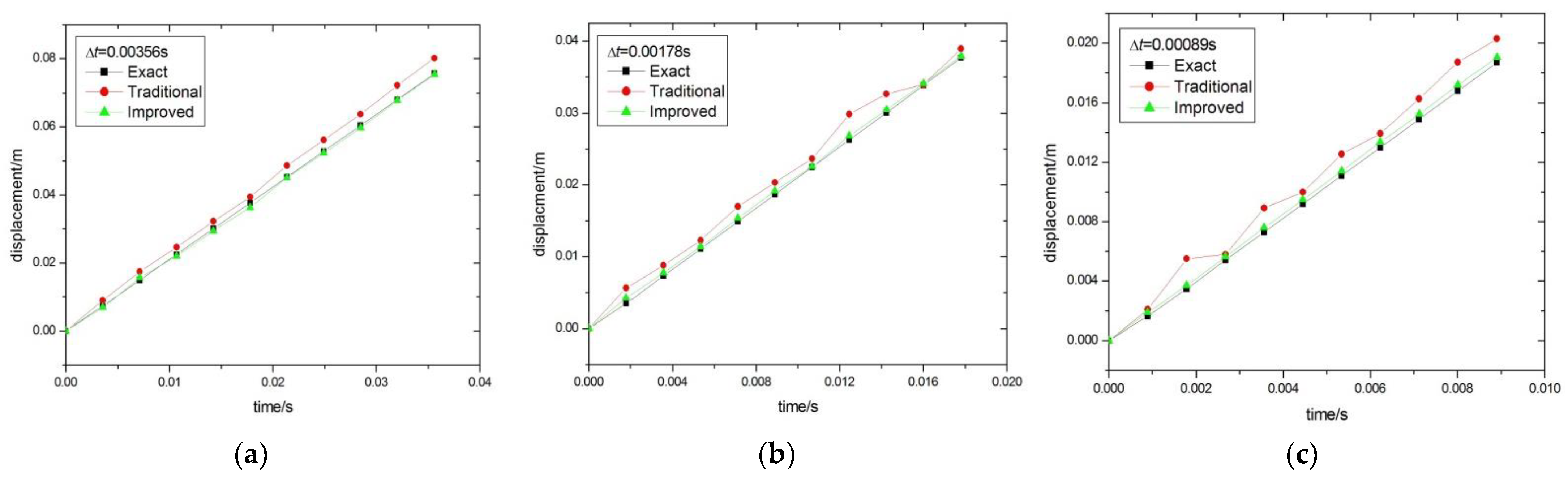
4.1. Longitudinal Forced Vibration of a Cantilevered Beam
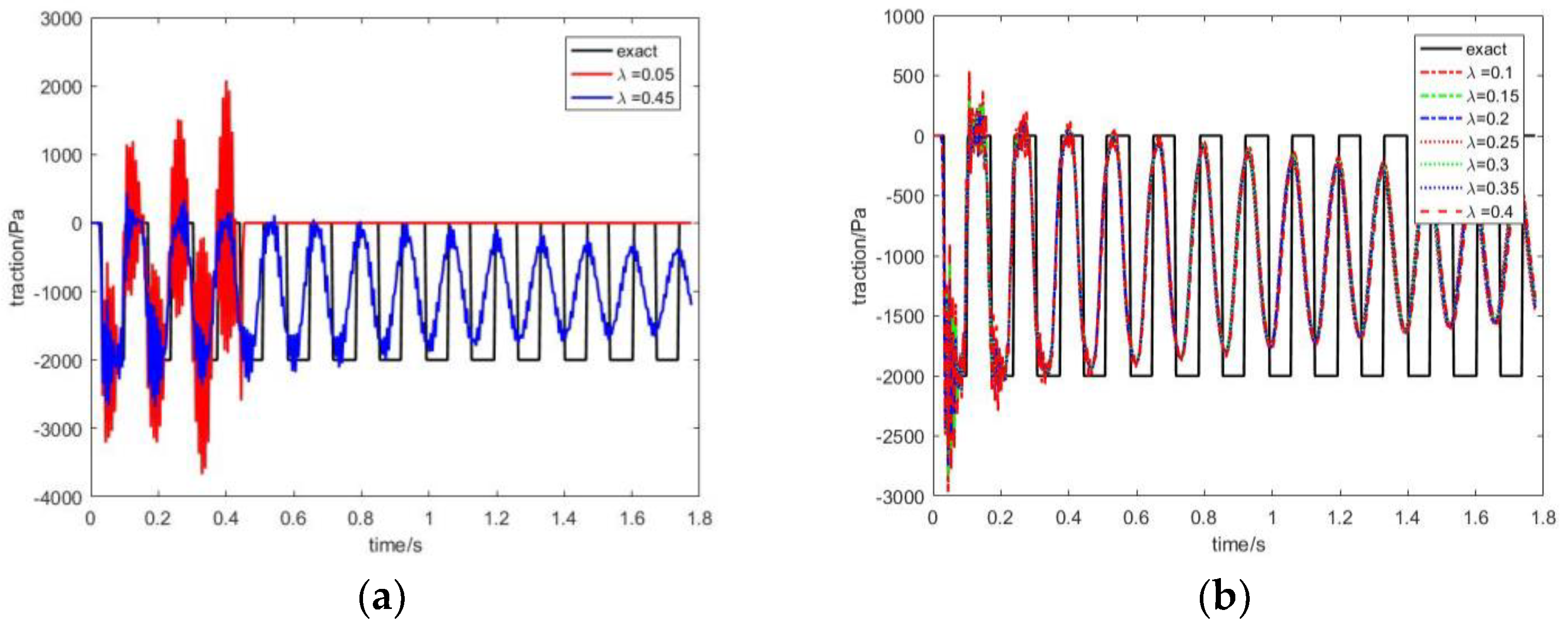
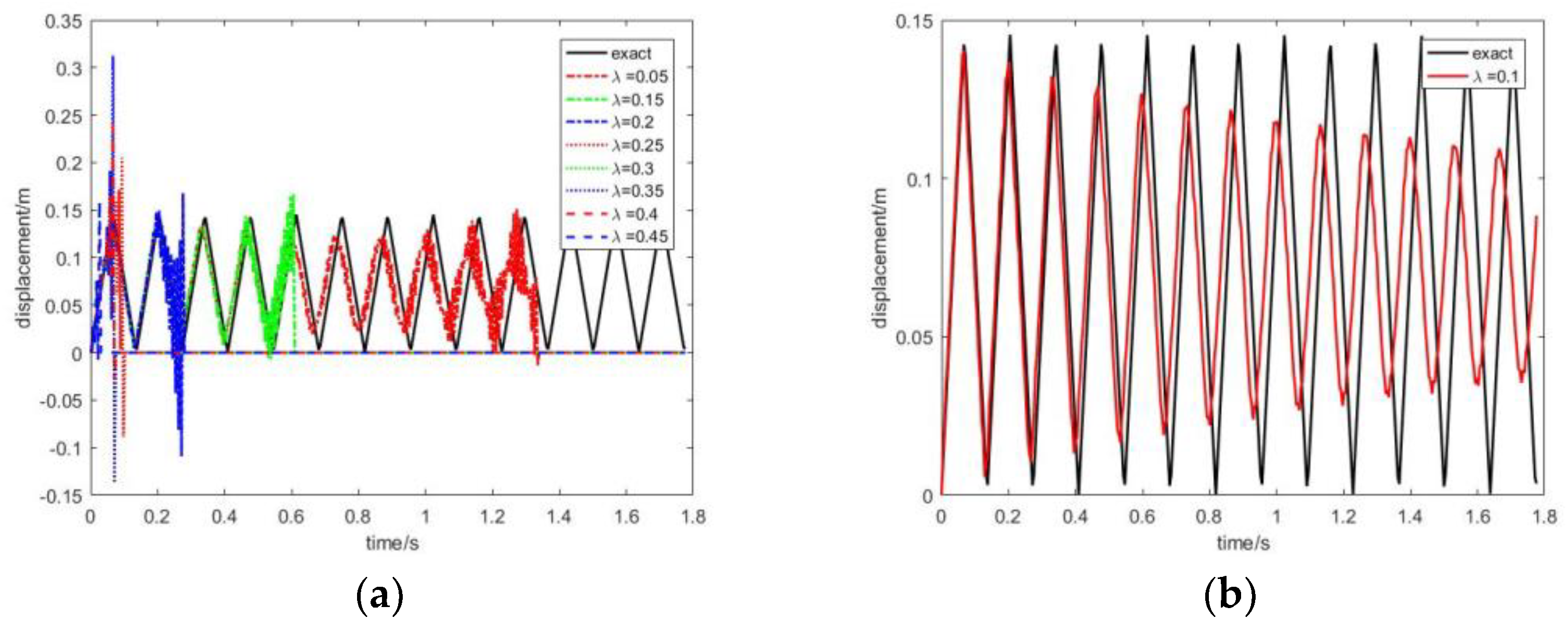
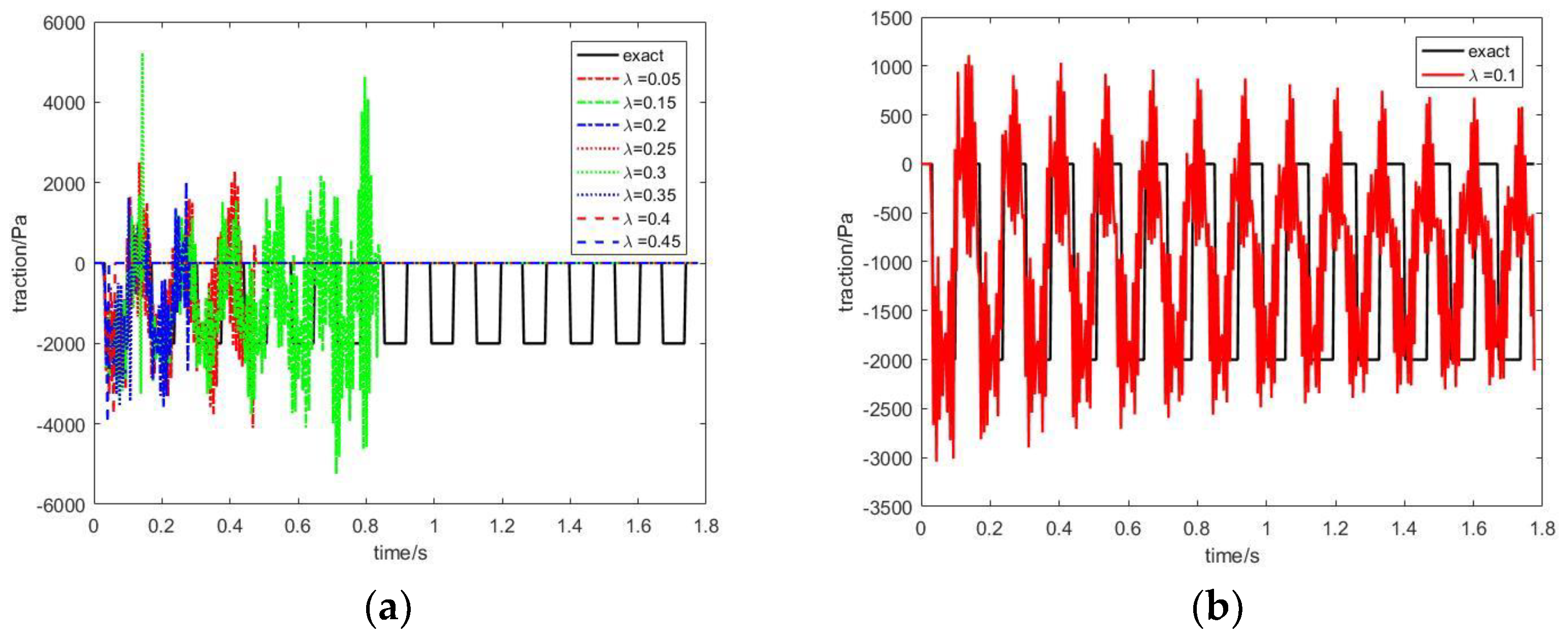
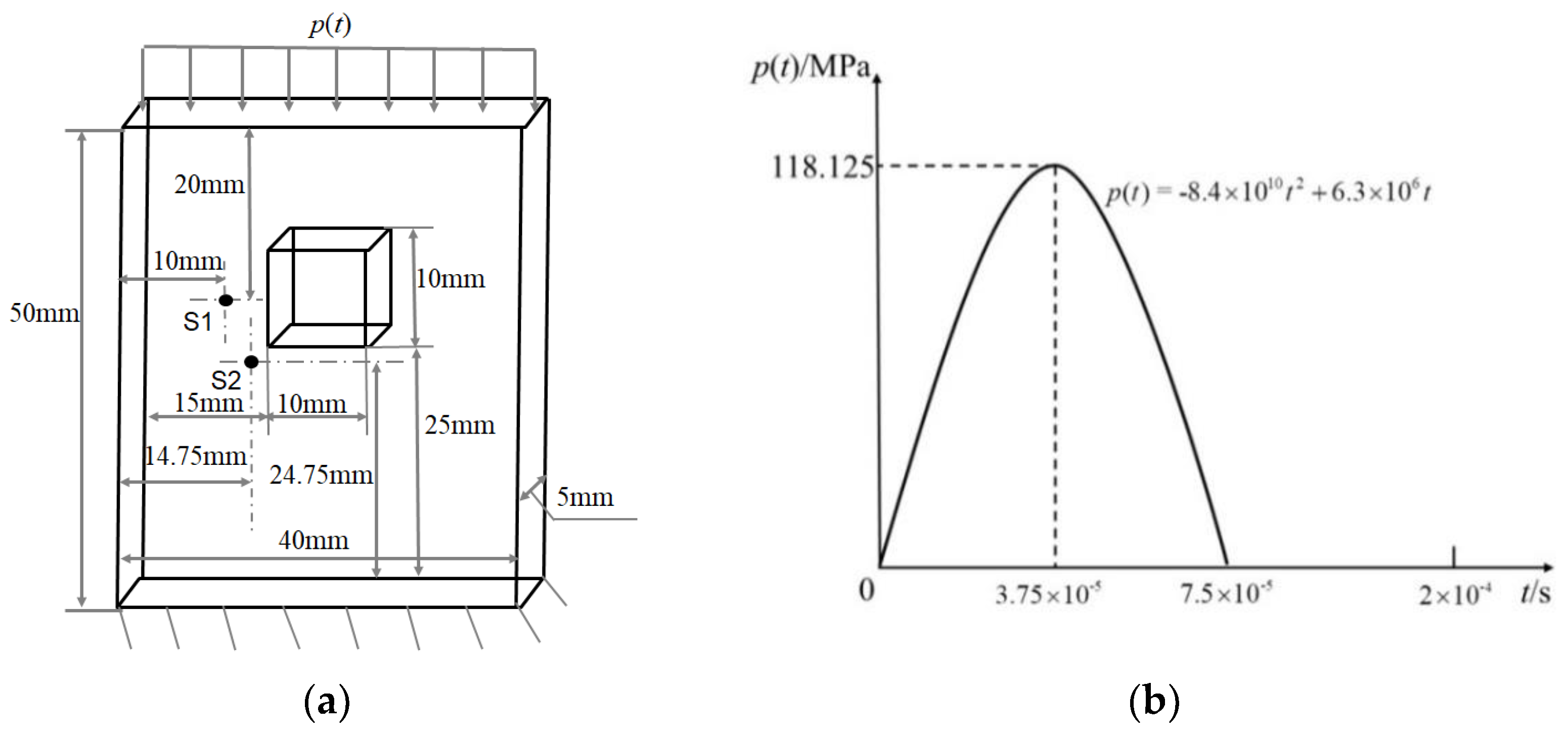
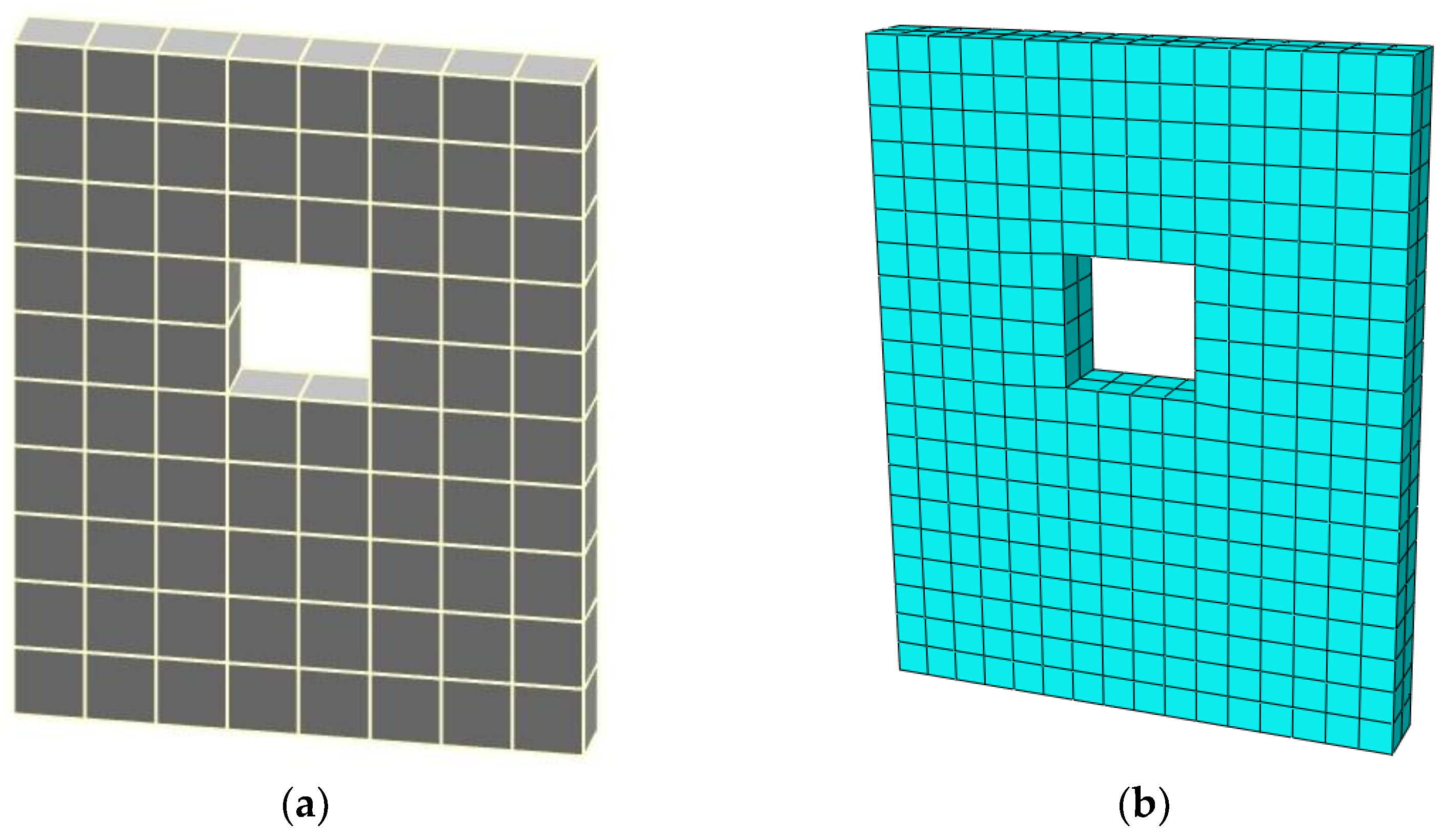
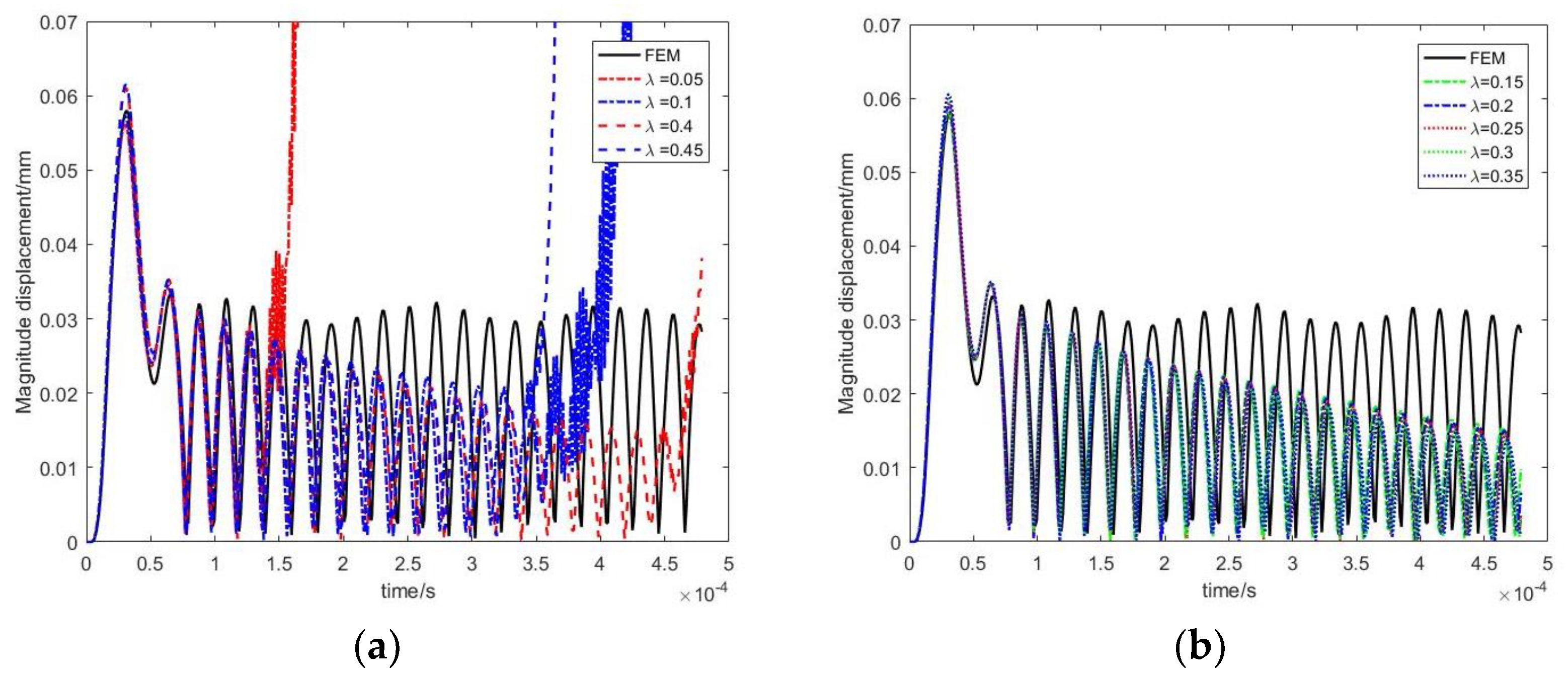
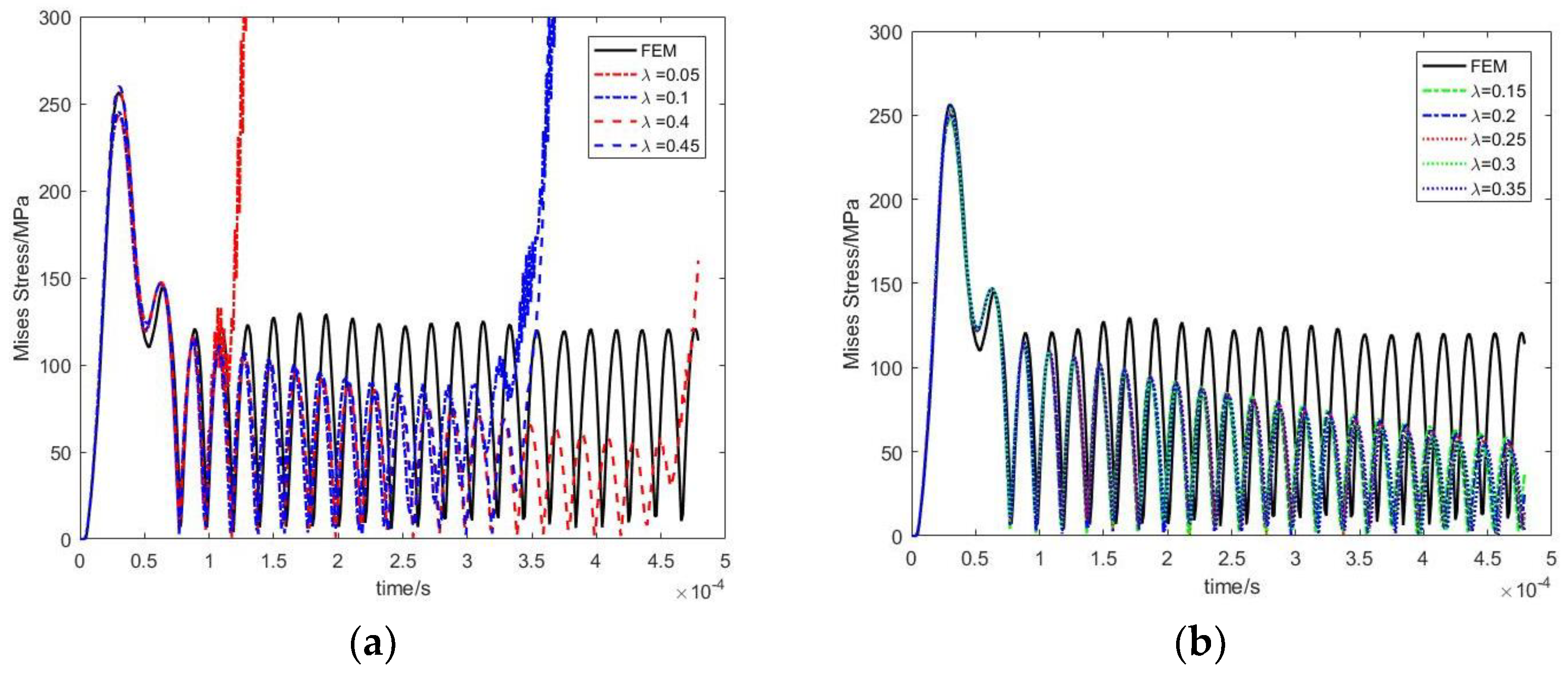
4.2. Response of a Plate with a Square Hole under Dynamic Load
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brebbia, C.A. The Boundary Element Method for Engineers; Pentech Press: London, UK, 1978. [Google Scholar]
- Giannella, V. Stochastic approach to fatigue crack-growth simulation for a railway axle under input data variability. Int. J. Fatigue 2021, 144, 106044. [Google Scholar] [CrossRef]
- Citarella, R.; Buchholz, F.-G. Comparison of crack growth simulation by DBEM and FEM for SEN-specimens undergoing torsion or bending loading. Eng. Fract. Mech. 2008, 75, 489–509. [Google Scholar] [CrossRef]
- Citarella, R.; Cricrì, G. Comparison of DBEM and FEM Crack Path Predictions in a notched Shaft under Torsion. Eng. Fract. Mech. 2010, 77, 1730–1749. [Google Scholar] [CrossRef]
- Citarella, R.; Federico, L. Advances in Vibroacoustics and Aeroacustics of Aerospace and Automotive Systems. Appl. Sci. 2018, 8, 366. [Google Scholar] [CrossRef] [Green Version]
- Citarella, R.; Federico, L.; Barbarino, M. Aeroacustic and Vibroacoustic Advancement in Aerospace and Automotive Systems. Appl. Sci. 2020, 10, 3853. [Google Scholar] [CrossRef]
- Chen, L.L.; Lian, H.; Liu, Z.; Chen, H.B.; Atroshchenko, E.; Bordas, S. Structural shape optimization of three dimensional acoustic problems with isogeometric boundary element methods. Comput. Methods Appl. Mech. Eng. 2019, 355, 926–951. [Google Scholar] [CrossRef]
- Chen, L.; Lu, C.; Lian, H.; Liu, Z.; Bordas, S. Acoustic topology optimization of sound absorbing materials directly from subdivision surfaces with isogeometric boundary element methods. Comput. Methods Appl. Mech. Eng. 2020, 362, 112806. [Google Scholar] [CrossRef]
- Hughes, T.J.R. The Finite Element Method: Linear Static and Dynamic Finite Element Analysis; Prentice Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Armentani, E.; Giannella, V.; Citarella, R.; Parente, A.; Pirelli, M. Substructuring of a Petrol Engine: Dynamic Characterization and Experimental Validation. Appl. Sci. 2019, 9, 4969. [Google Scholar] [CrossRef] [Green Version]
- Perrella, M.; Gerbino, S.; Citarella, R. BEM in Biomechanics: Modelling Advances and Limitations, Book Chapter in Numerical Methods and Advanced Simulation in Biomechanics and Biological Processes; Academic Press: New York, NY, USA, 2017. [Google Scholar]
- Karur, S.; Ramachandran, P. Orthogonal collocation in the nonconforming boundary element method. J. Comput. Phys. 1995, 121, 373–382. [Google Scholar] [CrossRef]
- Trevelyan, J. Use of discontinuous boundary elements for fracture mechanics analysis. Eng. Anal. Bound. Elem. 1992, 10, 353–358. [Google Scholar] [CrossRef]
- Yerli, H.R.; Deneme, I.O. Elastodynamic boundary element formulation employing discontinuous curved elements. Soil Dyn. Earthq. Eng. 2008, 28, 480–491. [Google Scholar] [CrossRef]
- Sun, Y.; Trevelyan, J.; Hattori, G.; Lu, C. Discontinuous isogeometric boundary element (IGABEM) formulations in 3D automotive acoustics. Eng. Anal. Bound. Elem. 2019, 105, 303–311. [Google Scholar] [CrossRef]
- Xu, J.M.; Brebbia, C.A. Optimum positions for the nodes in discontinuous boundary elements. In Proceeding of the 8th Conference on Boundary Elements, Tokyo, Japan, 8 September 1986; pp. 751–767. [Google Scholar]
- Parreira, P. On the accuracy of continuous and discontinuous boundary elements. Eng. Anal. 1988, 5, 205–211. [Google Scholar] [CrossRef]
- Marburg, S.; Schneider, S. Influence of Element Types on Numeric Error for Acoustic Boundary Elements. J. Comput. Acoust 2008, 11, 363–386. [Google Scholar] [CrossRef]
- Manolis, G.D.; Banerjee, P.K. Conforming versus non-conforming boundary elements in three-dimensional elastostatics. Int. J. Numer. Meth. Eng. 1986, 23, 1885–1904. [Google Scholar] [CrossRef]
- Patterson, C.; Elsebai, N.A.S. A family of partially discontinuous boundary element for three-dimensional analysis. In Proceeding of the 5th Conference on Boundary Elements, Hiroshima, Japan, 8–11 November 1983; pp. 193–206. [Google Scholar]
- Subia, S.R.; Ingber, M.S.; Mitra, A.K. A comparison of the semidiscontinuous element and multiple node with auxiliary boundary collocation approaches for the boundary element method. Eng. Anal. Bound. Elem. 1995, 15, 19–27. [Google Scholar] [CrossRef]
- Sun, L.; Teng, B.; Liu, C.F. Removing irregular frequencies by a partial discontinuous higher order boundary element method. Ocean Eng. 2008, 35, 920–930. [Google Scholar] [CrossRef] [Green Version]
- Manolis, G.D.; Beskos, D.E. Boundary Element Method in Elastodynamics; Spon Press: London, UK, 1988. [Google Scholar]
- Frangi, A.; Novati, G. On the numerical stability of time-domain elastodynamic analyses by BEM. Comput. Methods Appl. Mech. Eng. 1999, 173, 403–417. [Google Scholar] [CrossRef]
- Marrero, M.; Dominguez, J. Numerical behavior of time domain BEM for three-dimensional transient elastodynamic problem. Eng. Anal. Bound. Elem. 2003, 27, 39–48. [Google Scholar] [CrossRef]
- Bai, X.; Pak, R.Y.S. On the stability of direct time-domain boundary element methods for elastodynamics. Eng. Anal. Bound. Elem. 2018, 96, 138–149. [Google Scholar] [CrossRef]
- Gao, X.W.; Zhang, J.B.; Zheng, B.J.; Zhang, C. Element-subdivision method for evaluation of singular integrals over narrow strip boundary elements of super thin and slender structures. Eng. Anal. Bound. Elem. 2016, 66, 145–154. [Google Scholar] [CrossRef]
- Xie, G.; Zhong, Y.; Zhou, F.; Du, W.; Zhang, D. Singularity cancellation method for time-domain boundary element formulation of elastodynamics: A direct approach. Appl. Math. Model. 2020, 80, 647–667. [Google Scholar] [CrossRef]
- Qin, X.; Zhang, J.; Li, G.; Sheng, X.; Song, Q.; Mu, D. An element implementation of the boundary face method for 3D potential problems. Eng. Anal. Bound. Elem. 2010, 34, 934–943. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Number of Gauss Points N = 50 | The Number of Gauss Points N = 200 | |||
|---|---|---|---|---|
| Computation Error of the Traditional Method | Computation Error of the Improved Method | Computation Error of the Traditional Method | Computation Error of the Improved Method | |
| Δt = 0.00356 | 0.0125 | 0.0028 | 0.0024 | 3.03 × 10−4 |
| Δt = 0.00178 | 0.0314 | 0.0042 | 0.0044 | 6.25 × 10−4 |
| Δt = 0.00089 | 0.1298 | 0.0053 | 0.0078 | 2.01 × 10−4 |
| Δt = 0.000356 | 0.5405 | 0.0012 | 0.0461 | 5.56 × 10−4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhang, N.; Gong, Y.; Mao, W.; Zhang, S. Three-Dimensional Elastodynamic Analysis Employing Partially Discontinuous Boundary Elements. Algorithms 2021, 14, 129. https://doi.org/10.3390/a14050129
Li Y, Zhang N, Gong Y, Mao W, Zhang S. Three-Dimensional Elastodynamic Analysis Employing Partially Discontinuous Boundary Elements. Algorithms. 2021; 14(5):129. https://doi.org/10.3390/a14050129
Chicago/Turabian StyleLi, Yuan, Ni Zhang, Yuejiao Gong, Wentao Mao, and Shiguang Zhang. 2021. "Three-Dimensional Elastodynamic Analysis Employing Partially Discontinuous Boundary Elements" Algorithms 14, no. 5: 129. https://doi.org/10.3390/a14050129
APA StyleLi, Y., Zhang, N., Gong, Y., Mao, W., & Zhang, S. (2021). Three-Dimensional Elastodynamic Analysis Employing Partially Discontinuous Boundary Elements. Algorithms, 14(5), 129. https://doi.org/10.3390/a14050129