Author Contributions
Conceptualization, A.V. and E.S.; methodology, A.V. and E.S.; software, A.V. and E.S.; validation, A.V. and E.S.; formal analysis, A.V. and E.S.; investigation, A.V. and E.S.; resources, A.V. and E.S.; data curation, A.V. and E.S.; writing—original draft preparation, A.V. and E.S.; writing—review and editing, A.V. and E.S.; visualization, A.V. and E.S.; supervision, E.S.; project administration, A.V. and E.S.; funding acquisition, A.V. and E.S. All authors have read and agreed to the published version of the manuscript.
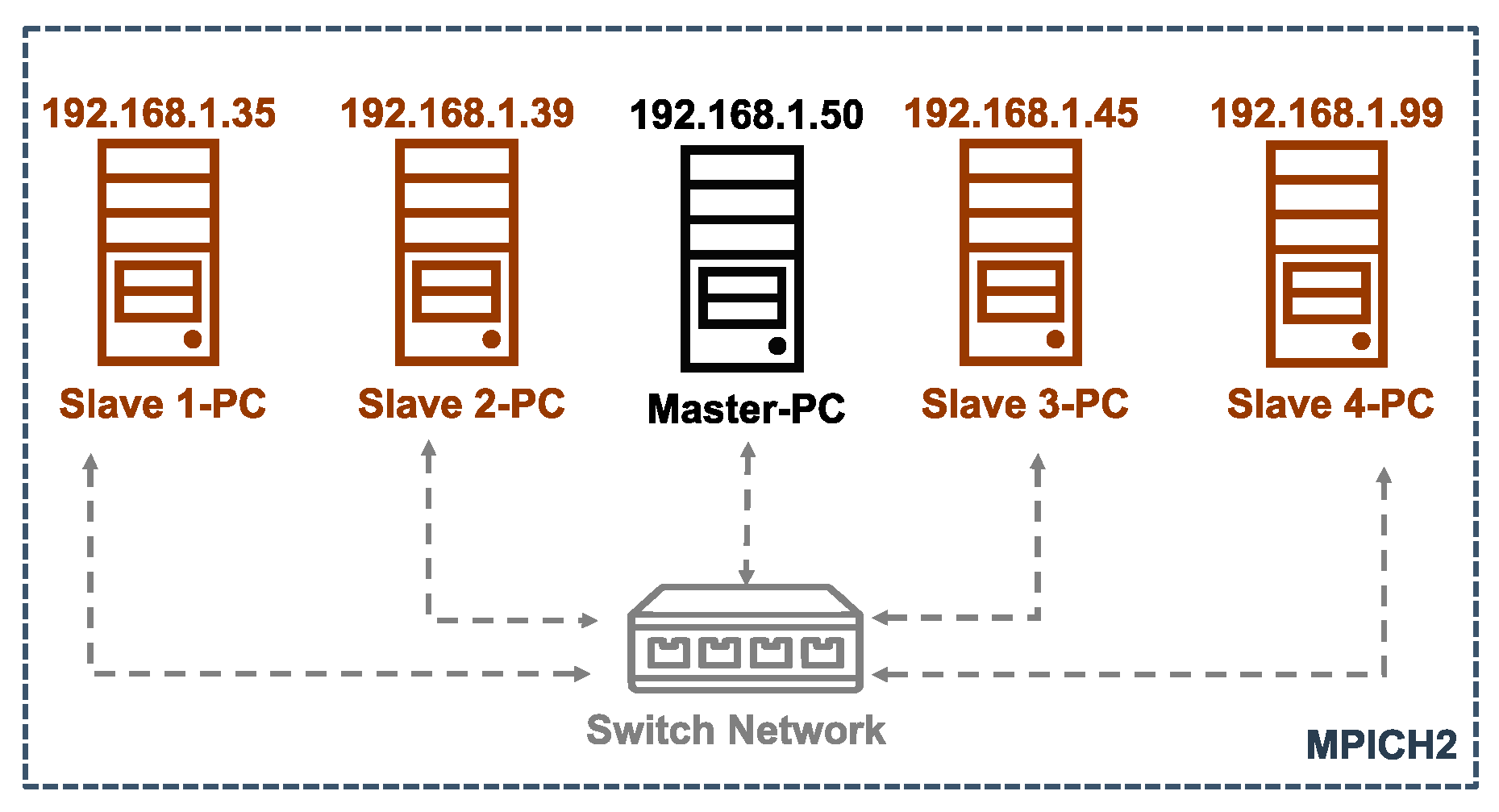
Figure 1.
The structure of the computational cluster using MPICH2.
Figure 1.
The structure of the computational cluster using MPICH2.
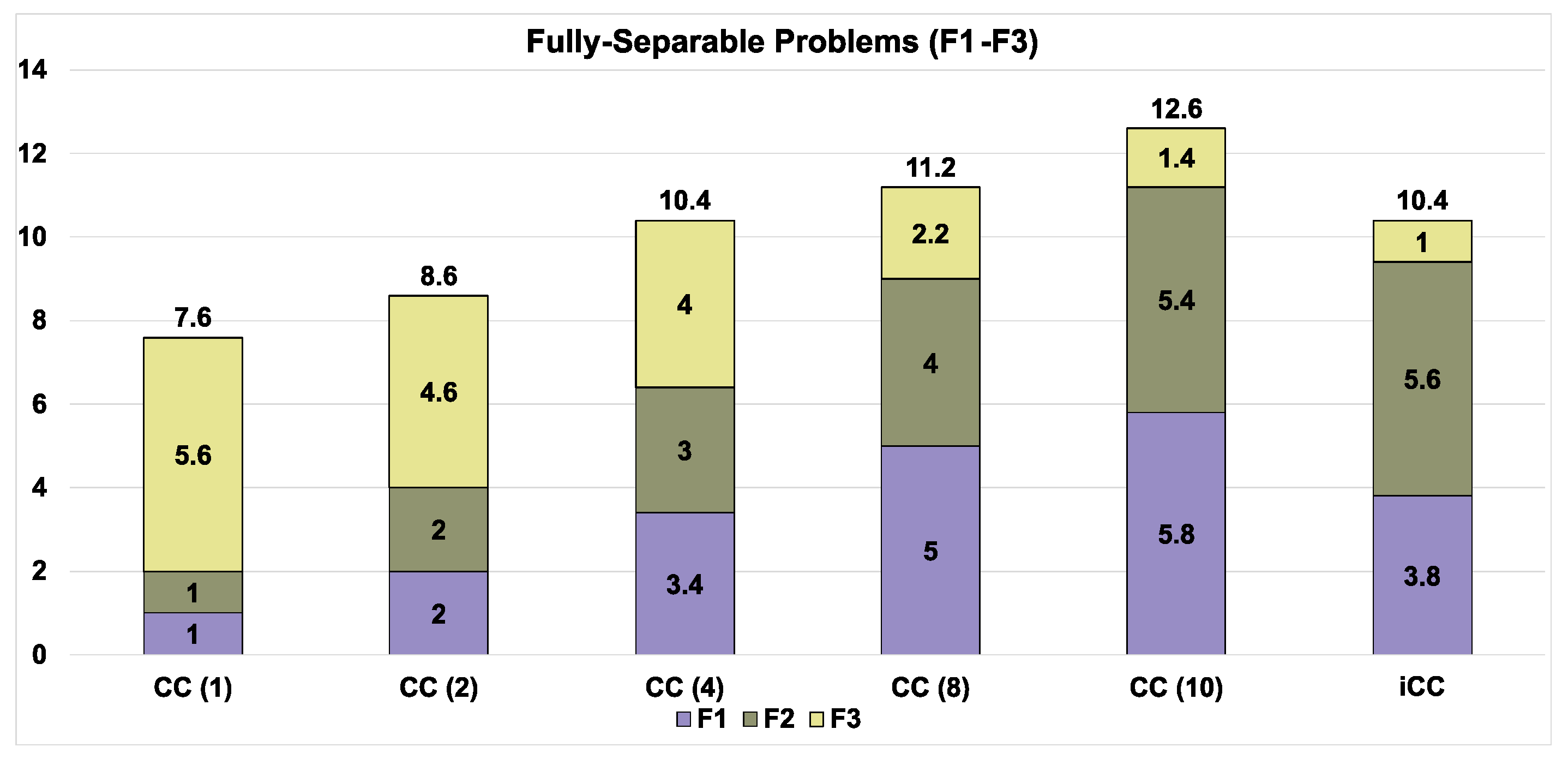
Figure 2.
Average ranks of algorithms on F1–F3 problems.
Figure 2.
Average ranks of algorithms on F1–F3 problems.
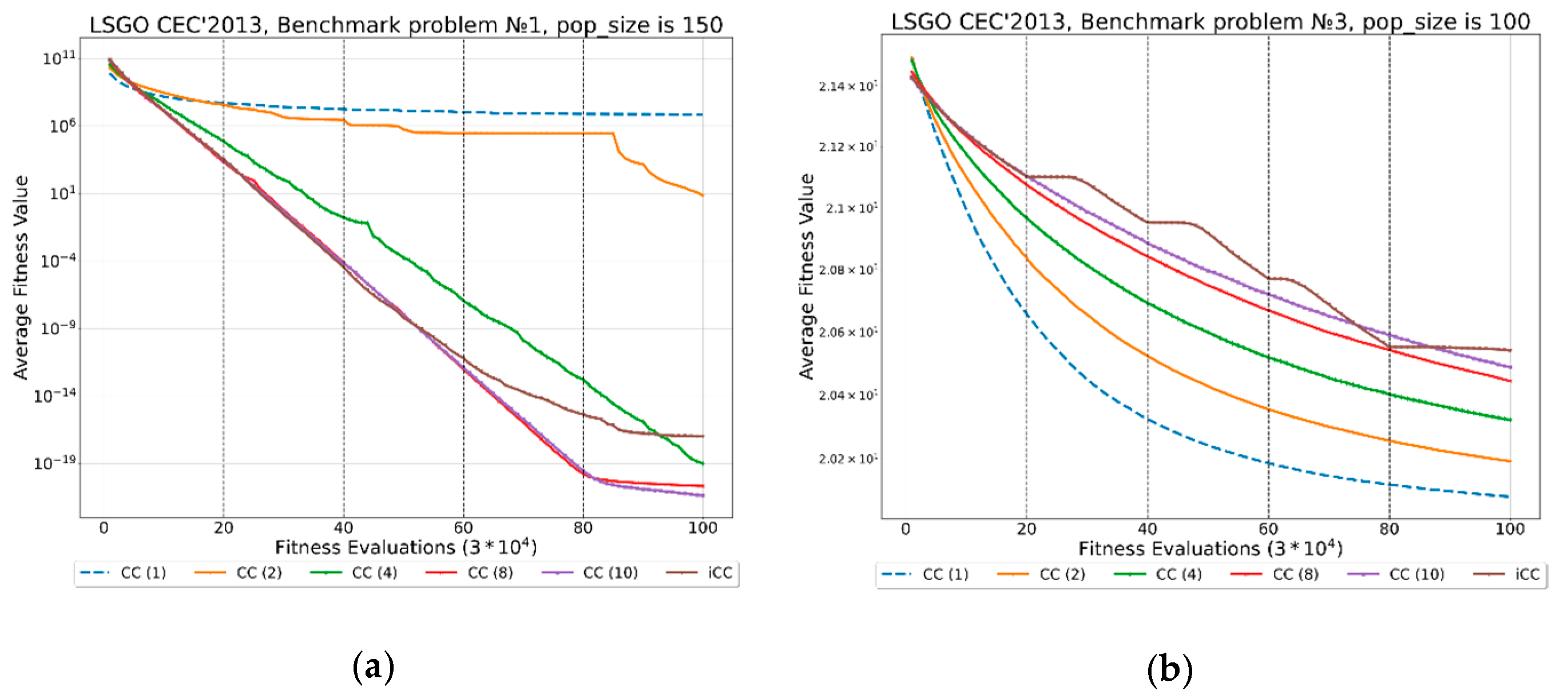
Figure 3.
Convergence graphs for CC(m) and iCC on F1, and F3 problems with different population size (format: F#-pop_size): (a) F1-150; (b) F3-100.
Figure 3.
Convergence graphs for CC(m) and iCC on F1, and F3 problems with different population size (format: F#-pop_size): (a) F1-150; (b) F3-100.
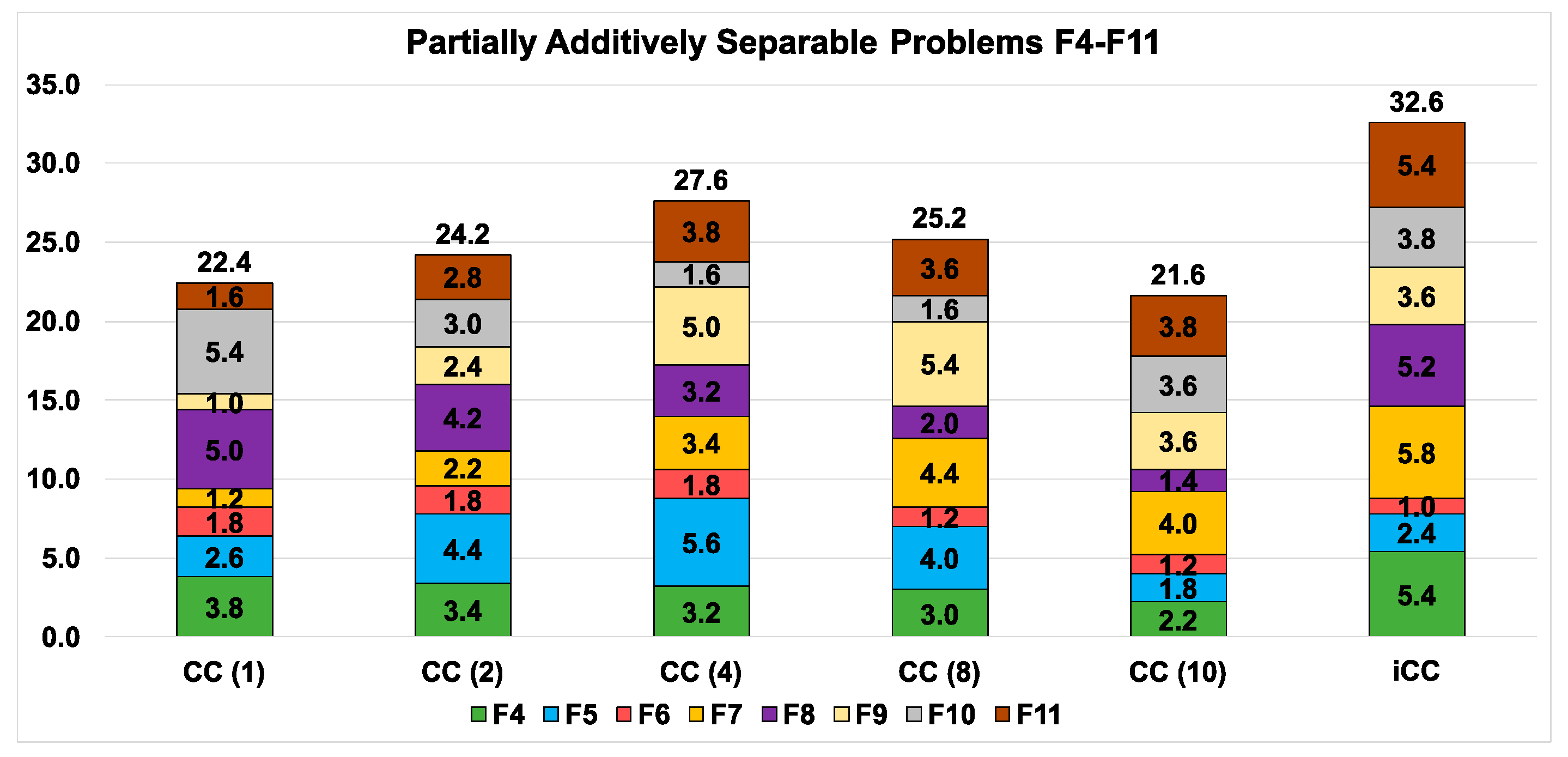
Figure 4.
Average ranks of algorithms on the F4–F11 problems.
Figure 4.
Average ranks of algorithms on the F4–F11 problems.
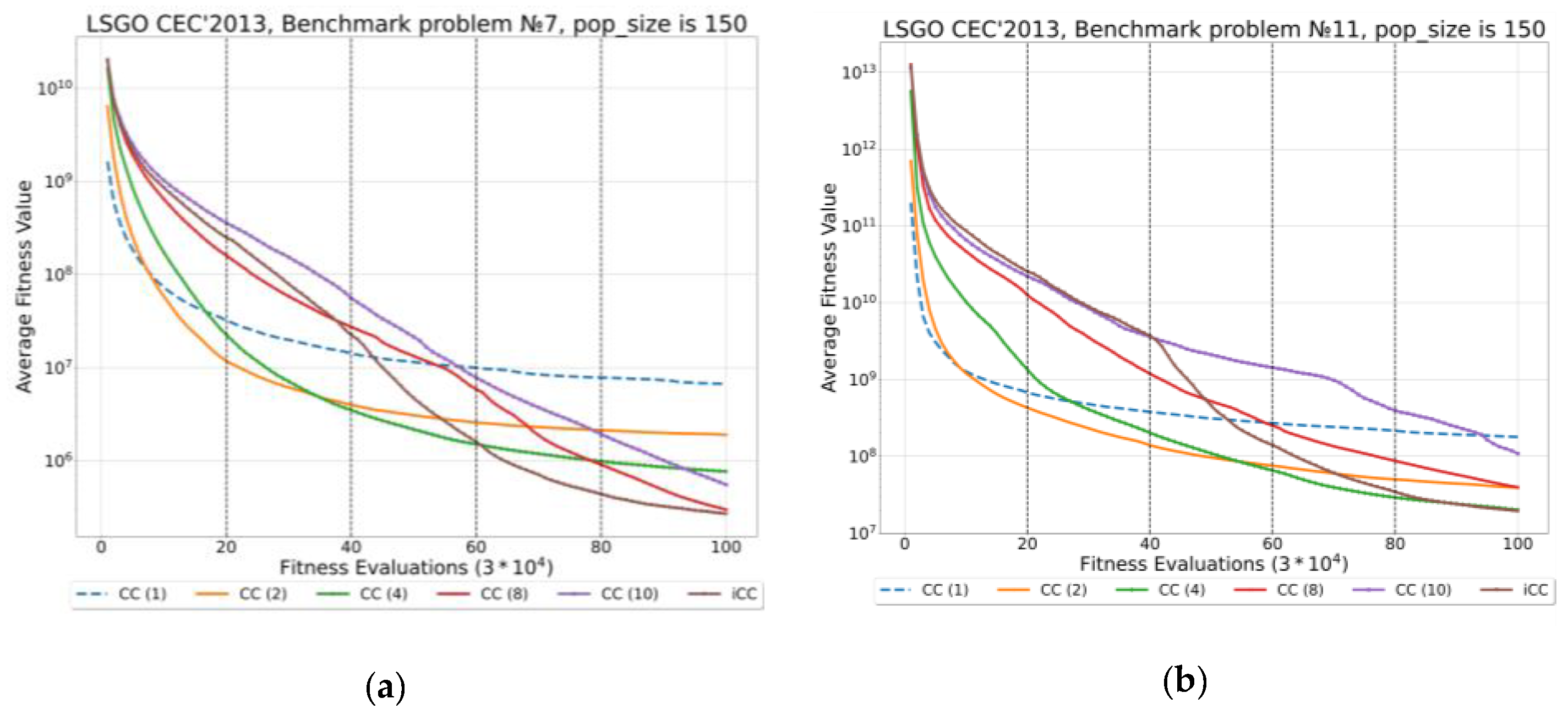
Figure 5.
Convergence graphs for CC(m) and iCC on F7, and F11 problems with different population size (F#-pop_size: (a) F7-150; (b) F11-150).
Figure 5.
Convergence graphs for CC(m) and iCC on F7, and F11 problems with different population size (F#-pop_size: (a) F7-150; (b) F11-150).
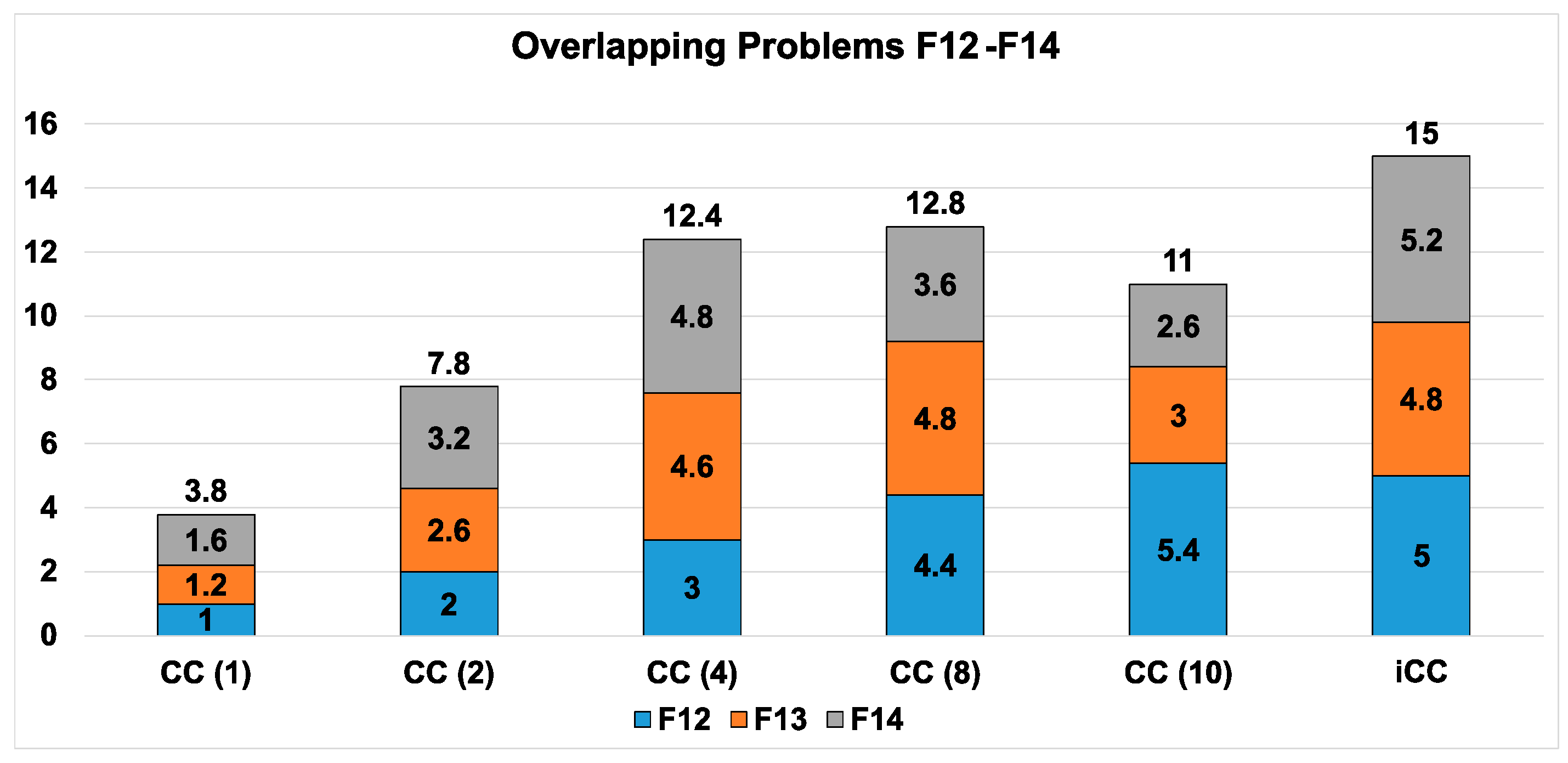
Figure 6.
Average ranks of algorithms on the F12–F14 problems.
Figure 6.
Average ranks of algorithms on the F12–F14 problems.
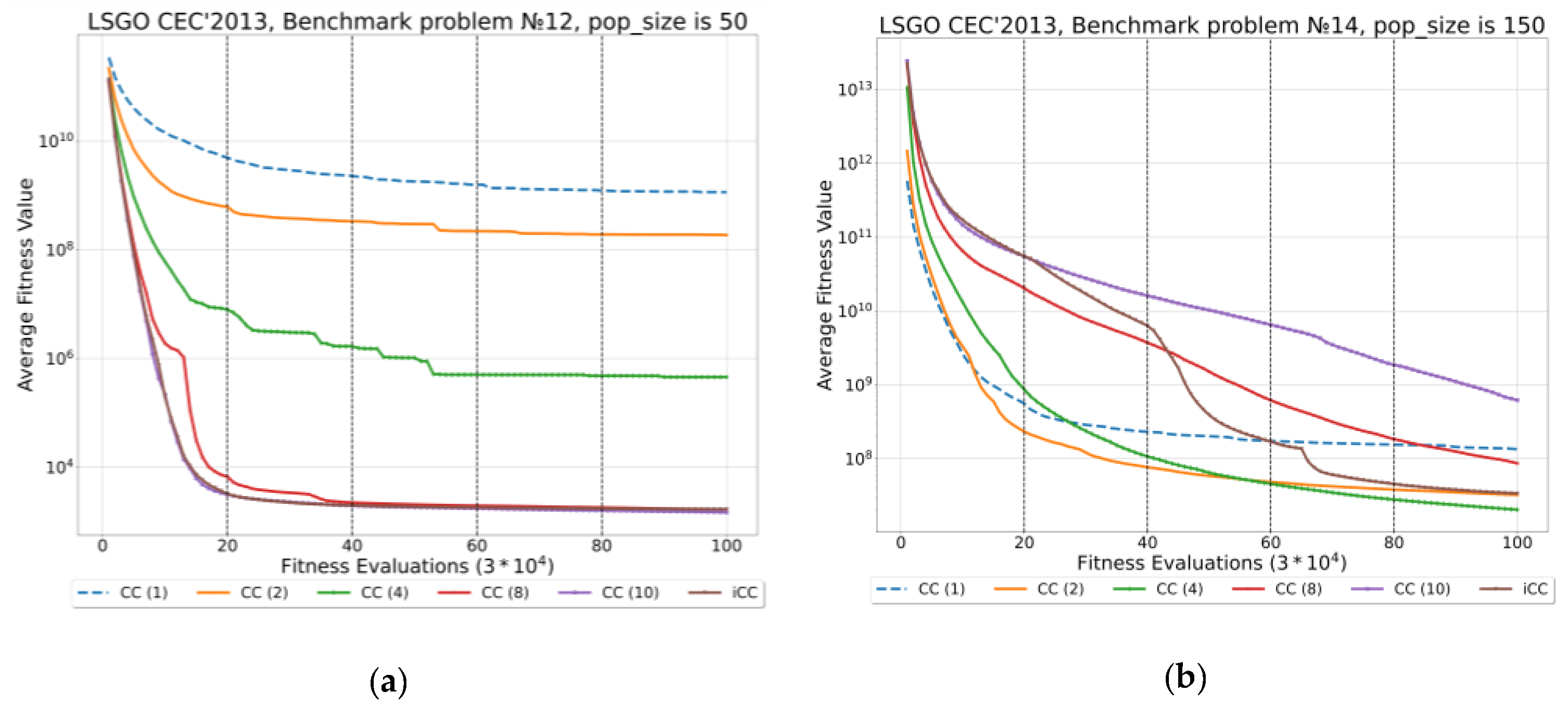
Figure 7.
Convergence graphs for CC(m) and iCC on F12 and F14 with different population size (F#-pop_size: (a) F12-25; (b) F14-150).
Figure 7.
Convergence graphs for CC(m) and iCC on F12 and F14 with different population size (F#-pop_size: (a) F12-25; (b) F14-150).
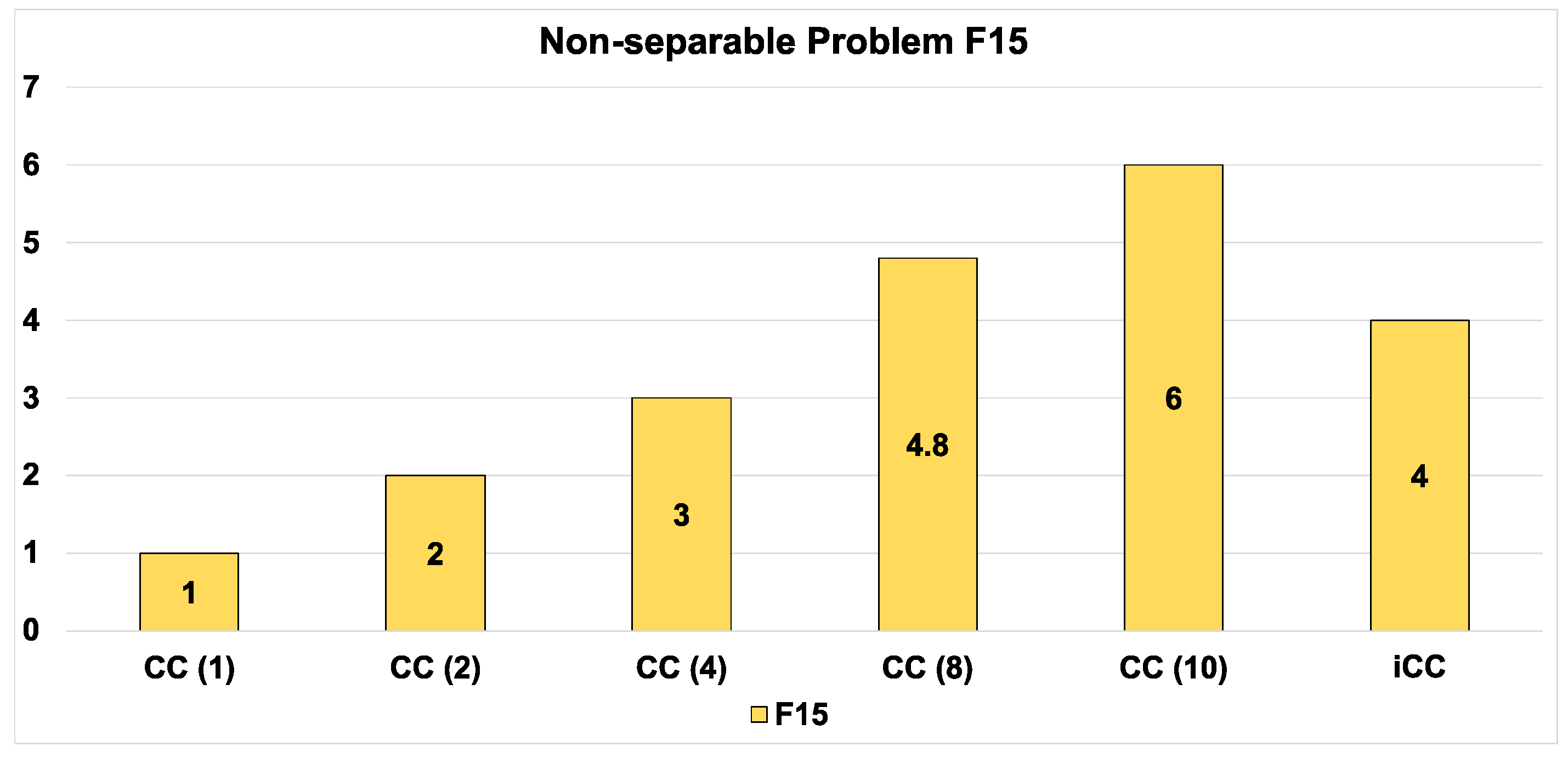
Figure 8.
Average ranks of algorithms on the F15 problem.
Figure 8.
Average ranks of algorithms on the F15 problem.
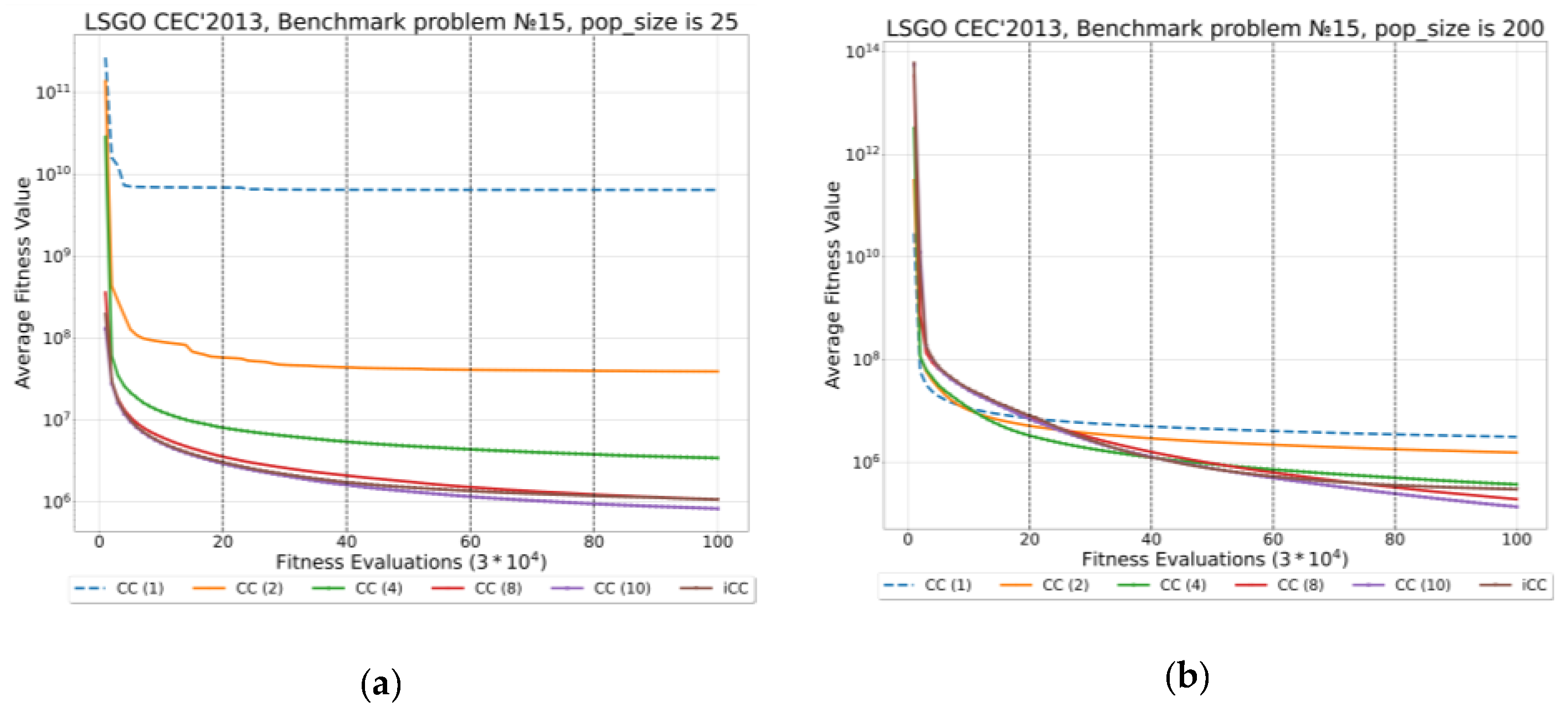
Figure 9.
Convergence graphs for CC(m) and iCC on F15 with different population size (F#-pop_size: (a) F15-25; (b) F15-200).
Figure 9.
Convergence graphs for CC(m) and iCC on F15 with different population size (F#-pop_size: (a) F15-25; (b) F15-200).
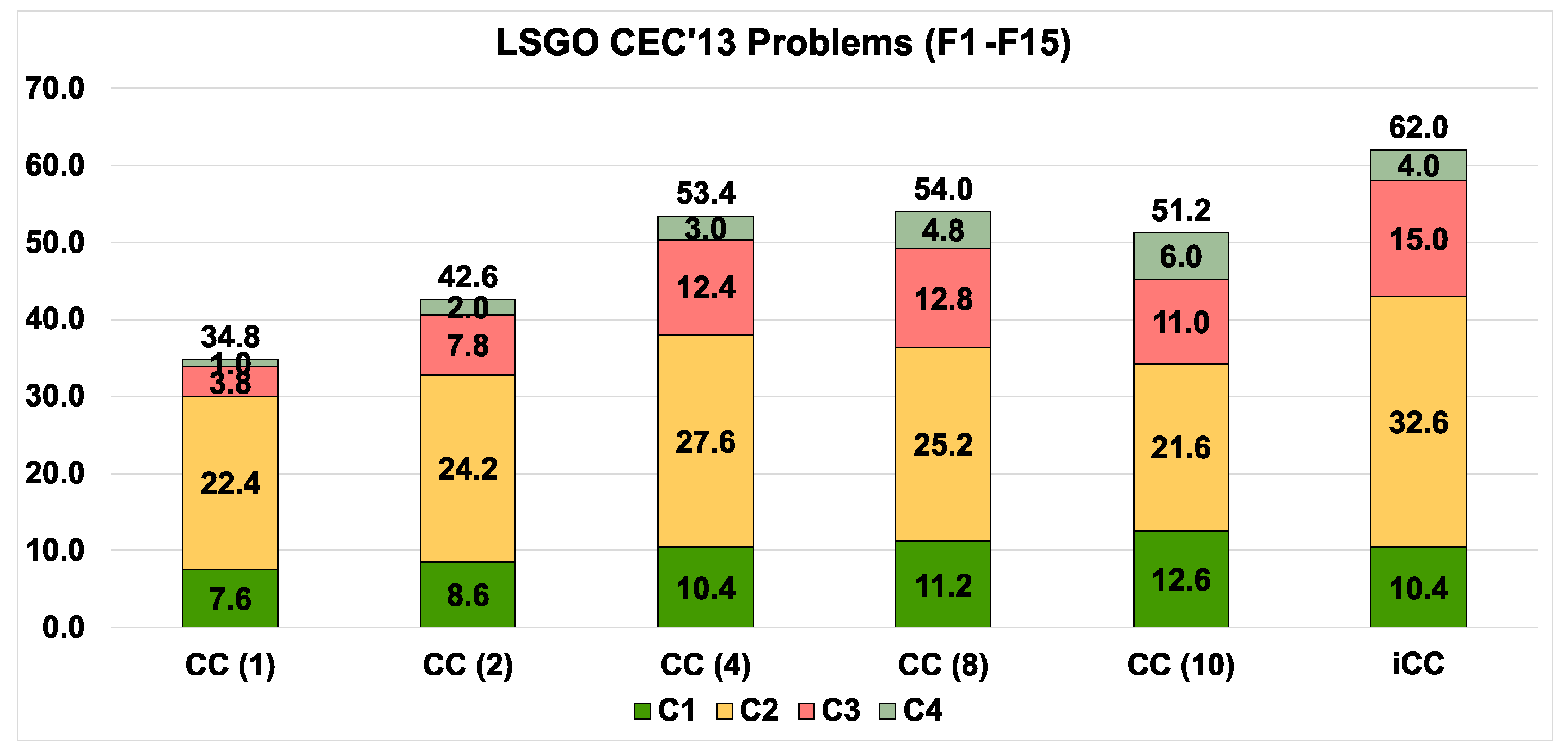
Figure 10.
Average ranks of algorithms on the F1–F15 problems.
Figure 10.
Average ranks of algorithms on the F1–F15 problems.
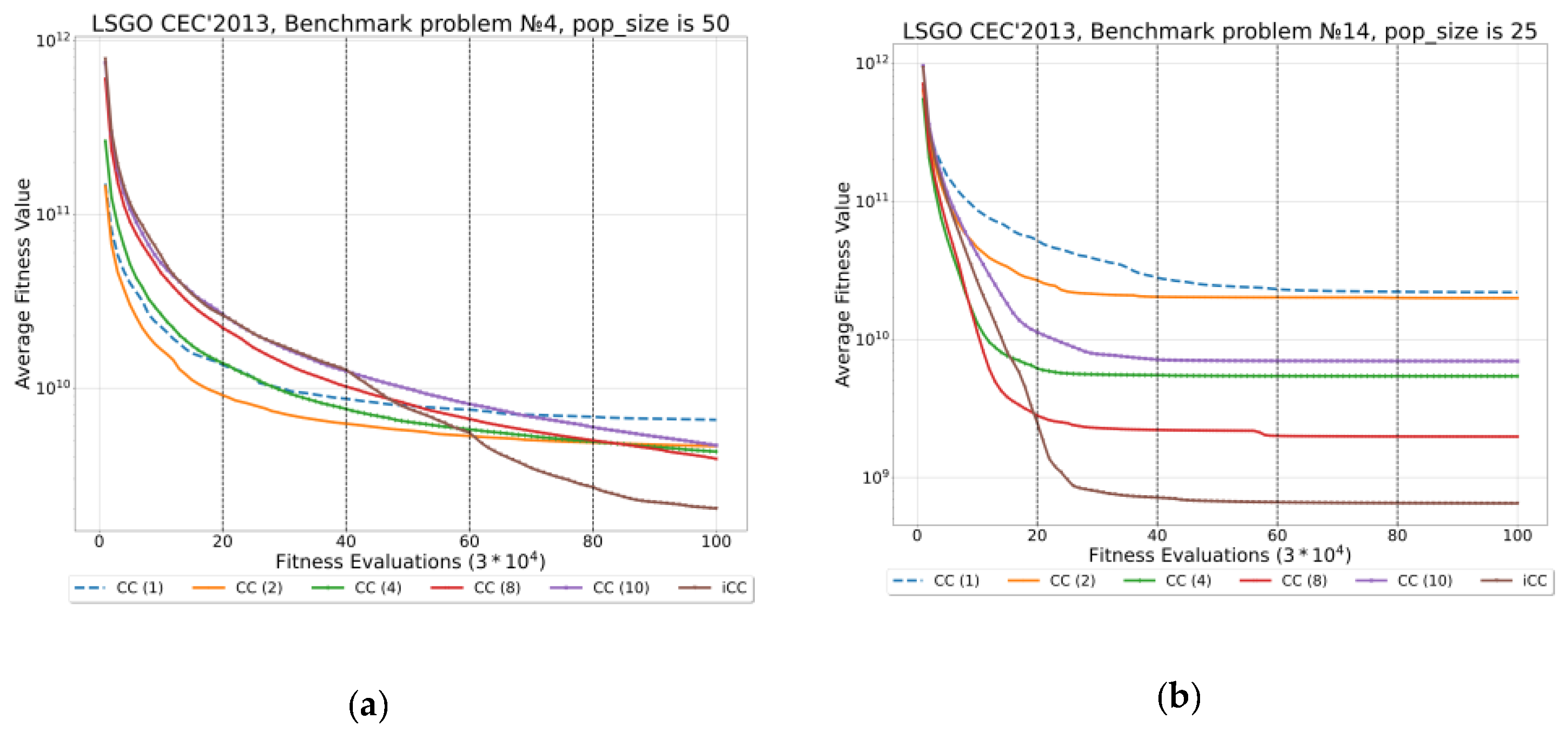
Figure 11.
Convergence graphs for CC and iCC on F4 and F14 with different population size (F#-pop_size: (a) F4-50; (b) F14-25)
Figure 11.
Convergence graphs for CC and iCC on F4 and F14 with different population size (F#-pop_size: (a) F4-50; (b) F14-25)
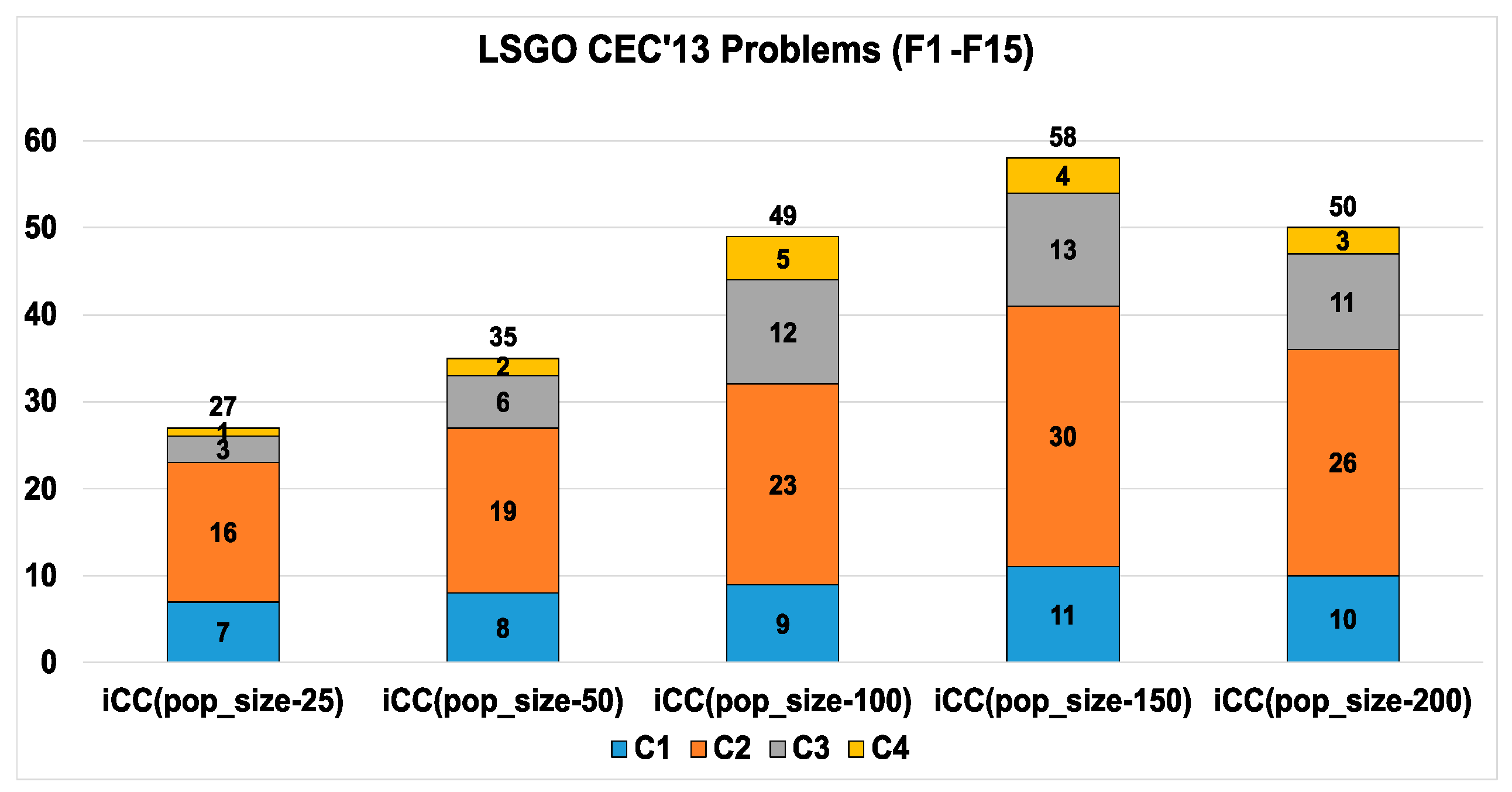
Figure 12.
Average ranks of algorithms, when tuning the population size of iCC algorithms.
Figure 12.
Average ranks of algorithms, when tuning the population size of iCC algorithms.
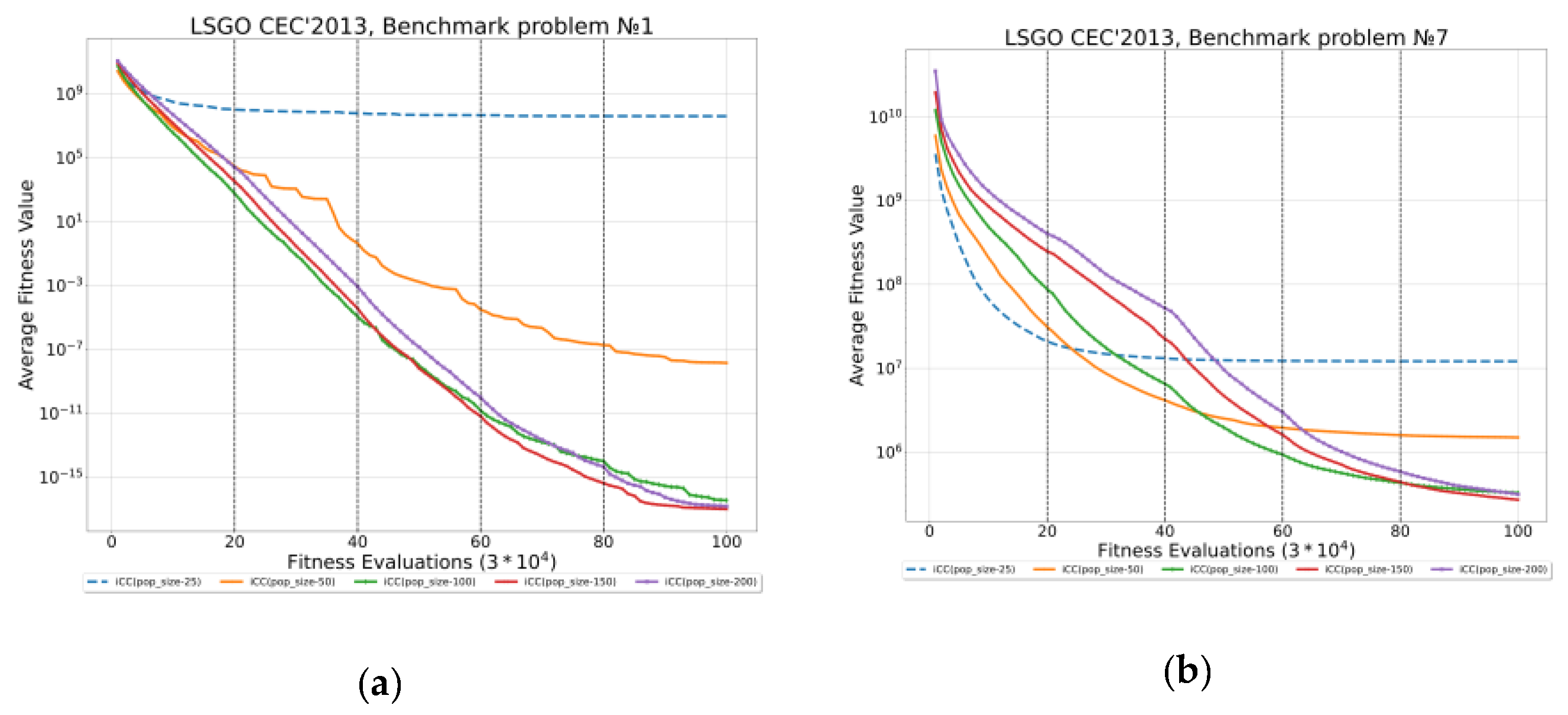
Figure 13.
Convergence graphs for iCC on F1 (a), and F7 (b) with different population size.
Figure 13.
Convergence graphs for iCC on F1 (a), and F7 (b) with different population size.
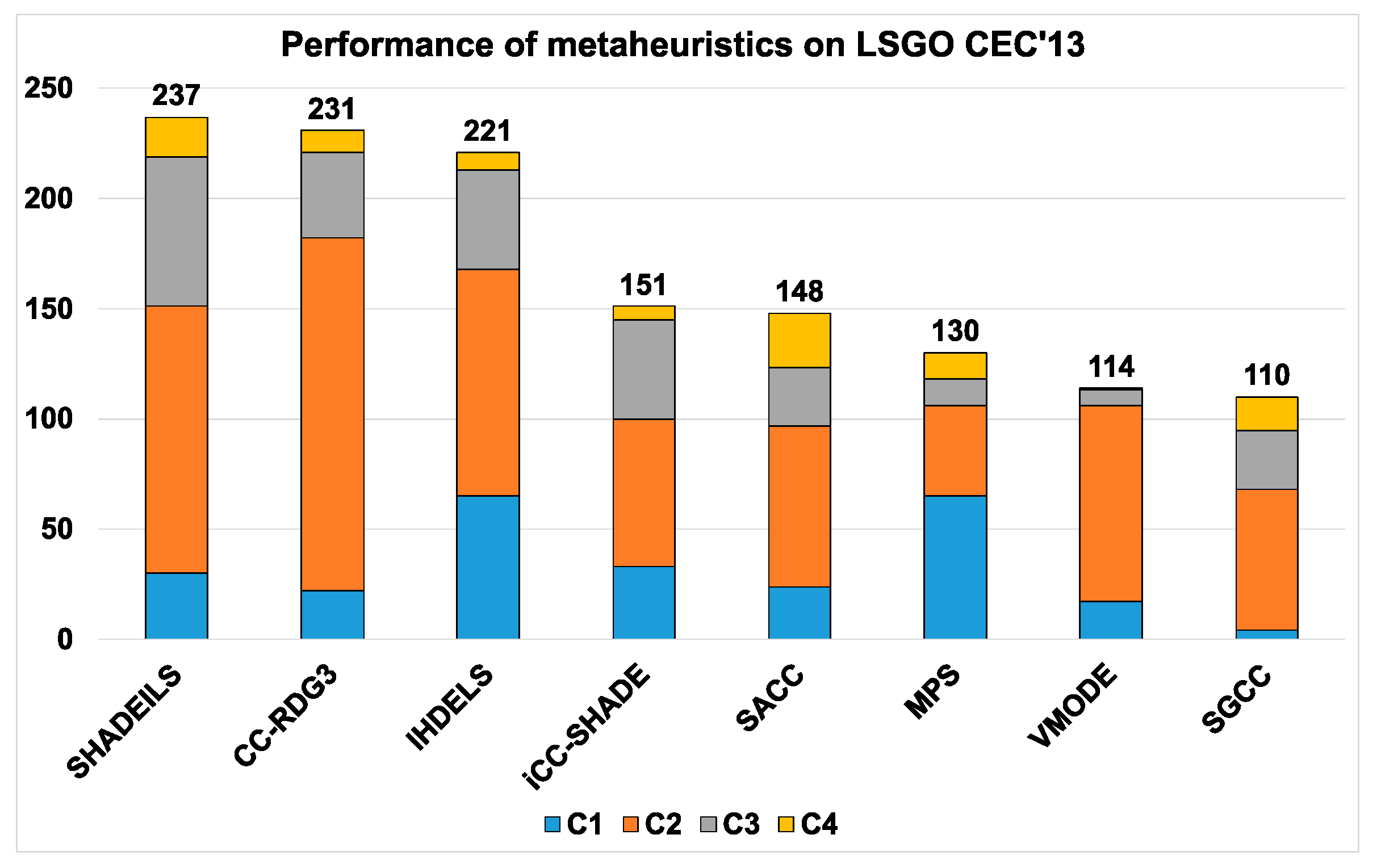
Figure 14.
Average ranks of algorithms, comparison of the fine-tuned iCC-SHADE and state-of-the-art metaheuristics.
Figure 14.
Average ranks of algorithms, comparison of the fine-tuned iCC-SHADE and state-of-the-art metaheuristics.
Table 1.
LSGO grouping techniques.
Table 1.
LSGO grouping techniques.
| Author | Year | Algorithm | Ref. | Decomposition Strategy |
|---|
| Potter M.A. et al. | 1994 | CCGA-1(2) | [18] | Static |
| van den Bergh F. et al. | 2004 | CPSO | [28] | Static |
| El-Abd M. | 2010 | CABC | [29] | Static |
| Shi Y. et al. | 2005 | CCDE | [30] | Static |
| Chen H. et al. | 2008 | CBFO | [31] | Static |
| Yang Z. et al. | 2008 | MLCC | [32] | Random |
| Yang Z. et al. | 2008 | DECC-G | [33] | Random |
| Li X. et al. | 2012 | CCPSO2 | [34] | Random |
| Ray T. et al. | 2009 | CCEA-AVP | [35] | Learning |
| Omidvar M. N. et al. | 2014 | DECC-DG | [26] | Learning |
| Omidvar M. N. et al. | 2011 | CBCC-DG | [36] | Learning |
| Liu J. et al. | 2013 | CC-CMA-ES | [37] | Learning |
| Xiaoming X. et al. | 2020 | TSPDG | [38] | Learning |
| Lin L. et al. | 2021 | DGSC2 | [39] | Learning |
| Wu X. et al. | 2019 | mSaDS-COA | [40] | Learning |
| Ren Z. et al. | 2020 | BHCC | [41] | Learning |
Table 2.
Specification of the computational cluster.
Table 2.
Specification of the computational cluster.
| Name of Node | CPU | Cores/Threads | Base Clock | RAM |
|---|
| Master-PC | Ryzen 1700x | 8/16 | 3.4 GHz | 16 Gb |
| Slave 1-PC | Ryzen 2700 | 8/16 | 3.2 GHz | 8 Gb |
| Slave 2-PC | Ryzen 2700 | 8/16 | 3.2 GHz | 8 Gb |
| Slave 3-PC | Ryzen 2700 | 8/16 | 3.2 GHz | 8 Gb |
| Slave 4-PC | Ryzen PRO 2700 | 8/16 | 3.2 GHz | 8 Gb |
Table 3.
The results of the Wilcoxon test for CC and iCC with different population sizes.
Table 3.
The results of the Wilcoxon test for CC and iCC with different population sizes.
| Number | Algorithm | (2) | (3) | (4) | (5) | (6) |
|---|
| (1) | CC(1) | 5/9/1 | 5/10/0 | 5/10/0 | 5/10/0 | 5/10/0 |
| (2) | CC(2) | - | 5/10/0 | 5/10/0 | 5/10/0 | 5/10/0 |
| (3) | CC(4) | - | - | 5/10/0 | 5/10/0 | 7/7/1 |
| (4) | CC(8) | - | - | - | 5/9/1 | 9/6/0 |
| (5) | CC(10) | - | - | - | - | 9/0/6 |
| (6) | iCC | - | - | - | - | - |
Table 4.
The sum of the Wilcoxon test results.
Table 4.
The sum of the Wilcoxon test results.
| Number | Algorithm | Win | Loss | Equal | Av. Rank |
|---|
| (5) | CC(10) | 48 | 20 | 7 | 12.6 |
| (4) | CC(8) | 45 | 29 | 1 | 11.2 |
| (3) | CC(4) | 37 | 37 | 1 | 10.4 |
| (6) | iCC | 33 | 35 | 7 | 10.4 |
| (2) | CC(2) | 29 | 45 | 1 | 8.6 |
| (1) | CC(1) | 25 | 49 | 1 | 7.6 |
Table 5.
The results of the Wilcoxon test for CC and iCC with different population sizes.
Table 5.
The results of the Wilcoxon test for CC and iCC with different population sizes.
| Number | Algorithm | (2) | (3) | (4) | (5) | (6) |
|---|
| (1) | CC(1) | 6/19/15 | 13/21/6 | 17/19/4 | 18/16/6 | 14/19/7 |
| (2) | CC(2) | - | 8/14/18 | 13/14/13 | 17/11/12 | 9/20/11 |
| (3) | CC(4) | - | - | 10/8/22 | 18/9/13 | 12/17/11 |
| (4) | CC(8) | - | - | - | 9/2/29 | 6/13/21 |
| (5) | CC(10) | - | - | - | - | 1/15/24 |
| (6) | iCC | - | - | - | - | - |
Table 6.
The sum of the Wilcoxon test results.
Table 6.
The sum of the Wilcoxon test results.
| Number | Algorithm | Win | Loss | Equal | Av. Rank |
|---|
| (6) | iCC | 84 | 42 | 74 | 32.6 |
| (3) | CC(4) | 75 | 55 | 70 | 27.6 |
| (4) | CC(8) | 56 | 55 | 89 | 25.2 |
| (2) | CC(2) | 66 | 65 | 69 | 24.2 |
| (1) | CC(1) | 68 | 94 | 38 | 22.4 |
| (5) | CC(10) | 39 | 77 | 84 | 21.6 |
Table 7.
The results of the Wilcoxon test for CC and iCC with different population sizes.
Table 7.
The results of the Wilcoxon test for CC and iCC with different population sizes.
| Number | Algorithm | (2) | (3) | (4) | (5) | (6) |
|---|
| (1) | CC(1) | 0/12/3 | 0/15/0 | 0/14/1 | 1/12/2 | 0/15/0 |
| (2) | CC(2) | - | 0/13/2 | 3/10/2 | 4/10/1 | 1/10/4 |
| (3) | CC(4) | - | - | 4/8/3 | 5/7/3 | 4/9/2 |
| (4) | CC(8) | - | - | - | 6/3/6 | 0/5/10 |
| (5) | CC(10) | - | - | - | - | 1/5/9 |
| (6) | iCC | - | - | - | - | - |
Table 8.
The sum of the Wilcoxon test results.
Table 8.
The sum of the Wilcoxon test results.
| Number | Algorithm | Win | Loss | Equal | Av. Rank |
|---|
| (6) | iCC | 44 | 6 | 25 | 15 |
| (4) | CC(8) | 38 | 15 | 22 | 12.8 |
| (3) | CC(4) | 41 | 24 | 10 | 12.4 |
| (5) | CC(10) | 33 | 21 | 21 | 11 |
| (2) | CC(2) | 20 | 43 | 12 | 7.8 |
| (1) | CC(1) | 1 | 68 | 0 | 3.8 |
Table 9.
The results of the Wilcoxon test for CC and iCC with different population sizes.
Table 9.
The results of the Wilcoxon test for CC and iCC with different population sizes.
| Number | Algorithm | (2) | (3) | (4) | (5) | (6) |
|---|
| (1) | CC(1) | 0/5/0 | 0/5/0 | 0/5/0 | 0/5/0 | 0/5/0 |
| (2) | CC(2) | - | 0/5/0 | 0/5/0 | 0/5/0 | 0/5/0 |
| (3) | CC(4) | - | - | 0/5/0 | 0/5/0 | 0/5/0 |
| (4) | CC(8) | - | - | - | 0/5/0 | 4/0/1 |
| (5) | CC(10) | - | - | - | - | 5/0/0 |
| (6) | iCC | - | - | - | - | - |
Table 10.
The sum of the Wilcoxon test results.
Table 10.
The sum of the Wilcoxon test results.
| Number | Algorithm | Win | Loss | Equal | Av. Rank |
|---|
| (5) | CC(10) | 25 | 0 | 0 | 6 |
| (4) | CC(8) | 4 | 20 | 1 | 4.8 |
| (6) | iCC | 15 | 9 | 1 | 4 |
| (3) | CC(4) | 10 | 15 | 0 | 3 |
| (2) | CC(2) | 5 | 20 | 0 | 2 |
| (1) | CC(1) | 0 | 25 | 0 | 1 |
Table 11.
The results of the Wilcoxon test for CC and iCC with different population sizes.
Table 11.
The results of the Wilcoxon test for CC and iCC with different population sizes.
| Number | Algorithm | (2) | (3) | (4) | (5) | (6) |
|---|
| (1) | CC(1) | 11/45/19 | 18/51/6 | 22/48/5 | 24/43/8 | 19/49/7 |
| (2) | CC(2) | - | 13/42/20 | 21/39/15 | 26/36/13 | 15/45/15 |
| (3) | CC(4) | - | - | 19/31/25 | 28/31/16 | 23/38/14 |
| (4) | CC(8) | - | - | - | 20/19/36 | 19/24/32 |
| (5) | CC(10) | - | - | - | - | 16/20/39 |
| (6) | iCC | - | - | - | - | - |
Table 12.
The sum of the Wilcoxon test results.
Table 12.
The sum of the Wilcoxon test results.
| Number | Algorithm | Win | Loss | Equal | Av. Rank |
|---|
| (6) | iCC | 176 | 92 | 107 | 62 |
| (4) | CC(8) | 157 | 105 | 113 | 54 |
| (3) | CC(4) | 163 | 131 | 81 | 53.4 |
| (5) | CC(10) | 145 | 118 | 112 | 51.2 |
| (2) | CC(2) | 120 | 173 | 82 | 42.6 |
| (1) | CC(1) | 94 | 236 | 45 | 34.8 |
Table 13.
The results of the Wilcoxon test for iCC with different population sizes.
Table 13.
The results of the Wilcoxon test for iCC with different population sizes.
| Number | Algorithm | (2) | (3) | (4) | (5) |
|---|
| (1) | iCC(pop_size-25) | 2/11/2 | 3/11/1 | 3/11/1 | 3/11/1 |
| (2) | iCC(pop_size-50) | - | 3/10/2 | 2/11/2 | 3/9/3 |
| (3) | iCC(pop_size-100) | - | - | 1/3/11 | 2/2/11 |
| (4) | iCC(pop_size-150) | - | - | - | 3/2/10 |
| (5) | iCC(pop_size-200) | - | - | - | - |
Table 14.
The sum of the Wilcoxon test results.
Table 14.
The sum of the Wilcoxon test results.
| Number | Algorithm | Win | Loss | Equal | Av. Rank |
|---|
| (4) | iCC(pop_size-150) | 28 | 8 | 24 | 58 |
| (5) | iCC(pop_size-200) | 24 | 11 | 25 | 50 |
| (3) | iCC(pop_size-100) | 24 | 11 | 25 | 49 |
| (2) | iCC(pop_size-50) | 19 | 32 | 9 | 35 |
| (1) | iCC(pop_size-25) | 11 | 44 | 5 | 27 |
Table 15.
iCC-SHADE vs. state-of-the-art metaheuristic.
Table 15.
iCC-SHADE vs. state-of-the-art metaheuristic.
| # | SHADEILS | CC-RDG3 | IHDELS | iCC-SHADE | SACC | MPS | VMODE | SGCC |
|---|
| 1 | 2.69 × 10−24 | 1.14 × 10−18 | 4.80 × 10−29 | 1.01 × 10−17 | 0.00 | 6.68 × 108 | 8.51 × 10−4 | 1.85 × 103 |
| 2 | 1.00 × 103 | 2.31 × 103 | 1.27 × 103 | 9.37 × 102 | 5.71 × 102 | 4.20 × 103 | 5.51 × 103 | 8.94 × 103 |
| 3 | 2.01 × 10 | 2.04 × 10 | 2.00 × 10 | 2.07 × 10 | 1.21 | 1.94 | 3.41 × 10−4 | 2.15 × 10 |
| 4 | 1.48 × 108 | 4.29 × 104 | 3.09 × 108 | 9.71 × 108 | 3.66 × 1010 | 1.07 × 1011 | 8.48 × 109 | 1.23 × 109 |
| 5 | 1.39 × 106 | 2.04 × 106 | 9.68 × 106 | 2.47 × 106 | 6.95 × 106 | 1.20 × 106 | 7.28 × 1014 | 5.02 × 106 |
| 6 | 1.02 × 106 | 1.00 × 106 | 1.03 × 106 | 1.06 × 106 | 2.07 × 105 | 6.01 × 103 | 1.99 × 105 | 1.06 × 106 |
| 7 | 7.41 × 10 | 1.71 × 10−21 | 3.18 × 104 | 2.70 × 105 | 1.58 × 107 | 7.19 × 107 | 3.44 × 106 | 1.83 × 105 |
| 8 | 3.17 × 1011 | 7.11 × 103 | 1.36 × 1012 | 2.84 × 1012 | 9.86 × 1014 | 2.04 × 1014 | 3.26 × 1013 | 1.54 × 1011 |
| 9 | 1.64 × 108 | 1.57 × 108 | 7.12 × 108 | 1.66 × 108 | 5.77 × 108 | 1.66 × 108 | 7.51 × 108 | 4.06 × 108 |
| 10 | 9.18 × 107 | 9.16 × 107 | 9.19 × 107 | 9.32 × 107 | 2.11 × 107 | 3.53 × 106 | 9.91 × 106 | 9.38 × 107 |
| 11 | 5.11 × 105 | 2.18 × 10−13 | 9.87 × 106 | 1.94 × 107 | 5.30 × 108 | 2.20 × 109 | 1.58 × 108 | 2.55 × 107 |
| 12 | 6.18 × 10 | 7.00 × 102 | 5.16 × 102 | 1.14 × 103 | 8.74 × 102 | 1.75 × 104 | 2.34 × 103 | 3.56 × 103 |
| 13 | 1.00 × 105 | 6.43 × 104 | 4.02 × 106 | 1.41 × 107 | 1.51 × 109 | 9.87 × 108 | 2.43 × 107 | 1.21 × 107 |
| 14 | 5.76 × 106 | 1.65 × 109 | 1.48 × 107 | 3.38 × 107 | 7.34 × 109 | 1.03 × 109 | 9.35 × 107 | 2.07 × 107 |
| 15 | 6.25 × 105 | 2.30 × 106 | 3.13 × 106 | 2.63 × 105 | 1.88 × 106 | 2.76 × 107 | 1.11 × 107 | 1.30 × 106 |
Table 16.
Scores for fine-tuned iCC-SHADE and state-of-the-art metaheuristics.
Table 16.
Scores for fine-tuned iCC-SHADE and state-of-the-art metaheuristics.
| # | SHADEILS | CC-RDG3 | IHDELS | iCC-SHADE | SACC | MPS | VMODE | SGCC |
|---|
| C1 | 30 | 22 | 65 | 33 | 24 | 65 | 17 | 4 |
| C2 | 121 | 160 | 103 | 67 | 73 | 41 | 89 | 64 |
| C3 | 68 | 39 | 45 | 45 | 26 | 12 | 7 | 27 |
| C4 | 18 | 10 | 8 | 6 | 25 | 12 | 1 | 15 |
| Total | 237 | 231 | 221 | 151 | 148 | 130 | 114 | 110 |
Table 17.
Detailed results for the fine-tuned iCC-SHADE algorithm.
Table 17.
Detailed results for the fine-tuned iCC-SHADE algorithm.
| | F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 |
|---|
| Q1 | 2.32 × 109 | 1.02 × 104 | 2.14 × 10 | 1.30 × 1011 | 7.24 × 106 | 1.06 × 106 | 1.66 × 109 | 3.33 × 1015 |
| 2.86 × 109 | 1.05 × 104 | 2.14 × 10 | 4.52 × 1011 | 8.56 × 106 | 1.06 × 106 | 2.84 × 109 | 7.77 × 1015 |
| 3.11 × 109 | 1.07 × 104 | 2.14 × 10 | 9.97 × 1011 | 1.01 × 107 | 1.06 × 106 | 4.41 × 109 | 1.35 × 1016 |
| 2.86 × 109 | 1.05 × 104 | 2.14 × 10 | 4.92 × 1011 | 8.71 × 106 | 1.06 × 106 | 3.00 × 109 | 7.93 × 1015 |
| 2.11 × 108 | 1.27 × 102 | 4.86 × 10−3 | 2.14 × 1011 | 7.57 × 105 | 1.26 × 103 | 7.82 × 108 | 2.76 × 1015 |
| Q2 | 1.47 × 103 | 1.02 × 103 | 2.12 × 10 | 2.22 × 1010 | 1.48 × 106 | 1.06 × 106 | 6.28 × 107 | 4.69 × 1014 |
| 2.96 × 103 | 1.49 × 103 | 2.12 × 10 | 6.61 × 1010 | 2.57 × 106 | 1.06 × 106 | 1.84 × 108 | 1.07 × 1015 |
| 7.55 × 103 | 2.09 × 103 | 2.12 × 10 | 1.22 × 1011 | 6.41 × 106 | 1.06 × 106 | 7.22 × 108 | 2.63 × 1015 |
| 3.21 × 103 | 1.51 × 103 | 2.12 × 10 | 6.53 × 1010 | 2.77 × 106 | 1.06 × 106 | 2.49 × 108 | 1.16 × 1015 |
| 1.57 × 103 | 2.96 × 102 | 7.87 × 10−3 | 2.67 × 1010 | 1.18 × 106 | 1.43 × 103 | 1.89 × 108 | 4.98 × 1014 |
| Q3 | 1.32 × 10−18 | 8.35 × 102 | 2.05 × 10 | 2.90 × 108 | 1.48 × 106 | 1.05 × 106 | 4.65 × 104 | 2.85 × 1011 |
| 6.77 × 10−18 | 9.35 × 102 | 2.07 × 10 | 7.87 × 108 | 2.53 × 106 | 1.06 × 106 | 2.56 × 105 | 1.26 × 1012 |
| 6.72 × 10−17 | 1.03 × 103 | 2.08 × 10 | 3.37 × 109 | 3.84 × 106 | 1.06 × 106 | 6.63 × 105 | 1.25 × 1013 |
| 1.01 × 10−17 | 9.37 × 102 | 2.07 × 10 | 9.71 × 108 | 2.47 × 106 | 1.06 × 106 | 2.70 × 105 | 2.84 × 1012 |
| 1.29 × 10−17 | 3.87 × 10 | 3.93 × 10−2 | 6.81 × 108 | 5.78 × 105 | 1.75 × 103 | 1.38 × 105 | 3.30 × 1012 |
| | F9 | F10 | F11 | F12 | F13 | F14 | F15 | |
| Q1 | 5.86 × 108 | 9.33 × 107 | 7.05 × 1010 | 2.56 × 109 | 8.31 × 1010 | 5.31 × 1011 | 4.40 × 107 | |
| 6.75 × 108 | 9.42 × 107 | 2.74 × 1011 | 3.09 × 109 | 1.12 × 1011 | 9.88 × 1011 | 6.32 × 107 | |
| 8.06 × 108 | 9.51 × 107 | 1.47 × 1012 | 3.84 × 109 | 1.34 × 1011 | 1.53 × 1012 | 9.31 × 107 | |
| 6.80 × 108 | 9.41 × 107 | 3.09 × 1011 | 3.15 × 109 | 1.09 × 1011 | 9.96 × 1011 | 6.47 × 107 | |
| 5.64 × 107 | 4.42 × 105 | 2.72 × 1011 | 2.91 × 108 | 1.54 × 1010 | 2.73 × 1011 | 1.32 × 107 | |
| Q2 | 1.26 × 108 | 9.26 × 107 | 8.42 × 108 | 1.73 × 103 | 3.03 × 109 | 5.56 × 109 | 3.29 × 106 | |
| 1.70 × 108 | 9.37 × 107 | 8.23 × 109 | 2.11 × 103 | 5.17 × 109 | 5.10 × 1010 | 4.30 × 106 | |
| 2.22 × 108 | 9.43 × 107 | 1.10 × 1011 | 2.82 × 103 | 1.00 × 1010 | 1.58 × 1011 | 6.80 × 106 | |
| 1.69 × 108 | 9.36 × 107 | 2.56 × 1010 | 2.10 × 103 | 5.67 × 109 | 5.54 × 1010 | 4.66 × 106 | |
| 2.63 × 107 | 4.60 × 105 | 3.01 × 1010 | 2.52 × 102 | 1.83 × 109 | 3.70 × 1010 | 9.99 × 105 | |
| Q3 | 1.24 × 108 | 9.25 × 107 | 6.29 × 106 | 9.75 × 102 | 6.23 × 106 | 1.66 × 107 | 1.84 × 105 | |
| 1.68 × 108 | 9.33 × 107 | 1.48 × 107 | 1.14 × 103 | 1.20 × 107 | 3.28 × 107 | 2.62 × 105 | |
| 2.18 × 108 | 9.37 × 107 | 4.13 × 107 | 1.43 × 103 | 3.72 × 107 | 7.88 × 107 | 3.29 × 105 | |
| 1.66 × 108 | 9.32 × 107 | 1.94 × 107 | 1.14 × 103 | 1.41 × 107 | 3.38 × 107 | 2.63 × 105 | |
| 2.59 × 107 | 3.64 × 105 | 1.12 × 107 | 1.00 × 102 | 7.38 × 106 | 1.31 × 107 | 3.73 × 104 | |


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}