
Containment Control of First-Order Multi-Agent Systems under PI Coordination Protocol †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
2.1. Graph Theory
2.2. Agents’ Dynamics and Coordination Protocol
3. Main Results
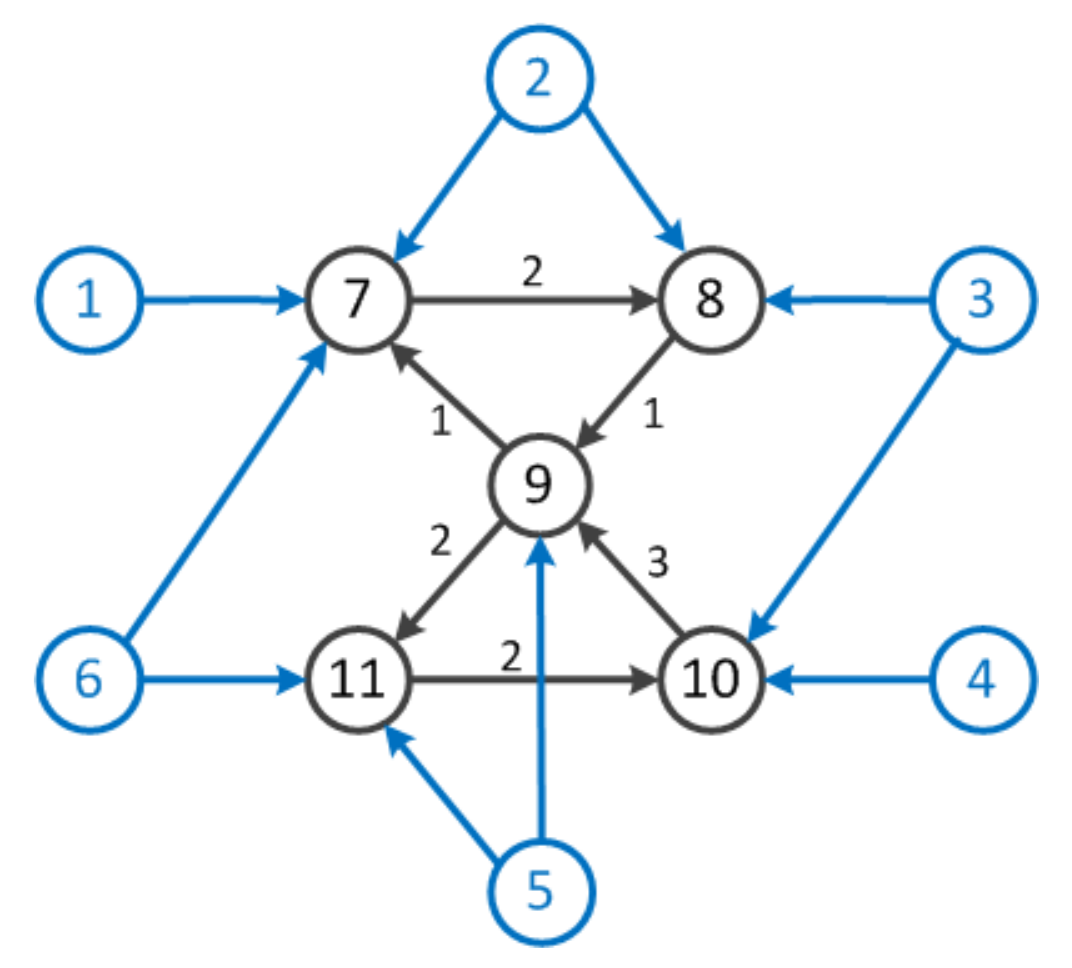
3.1. General Directed Follower Topology
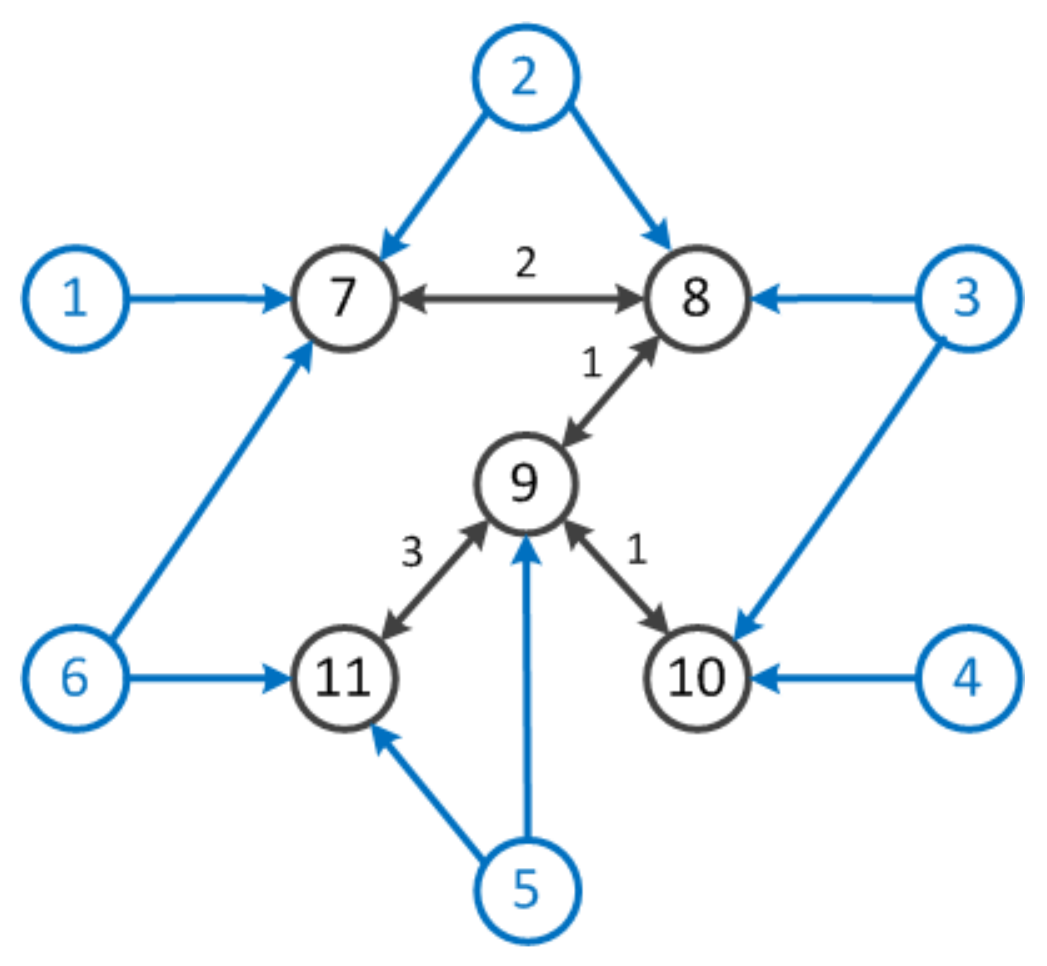
3.2. Symmetric Follower Topology
3.3. Unconnected Follower Topology
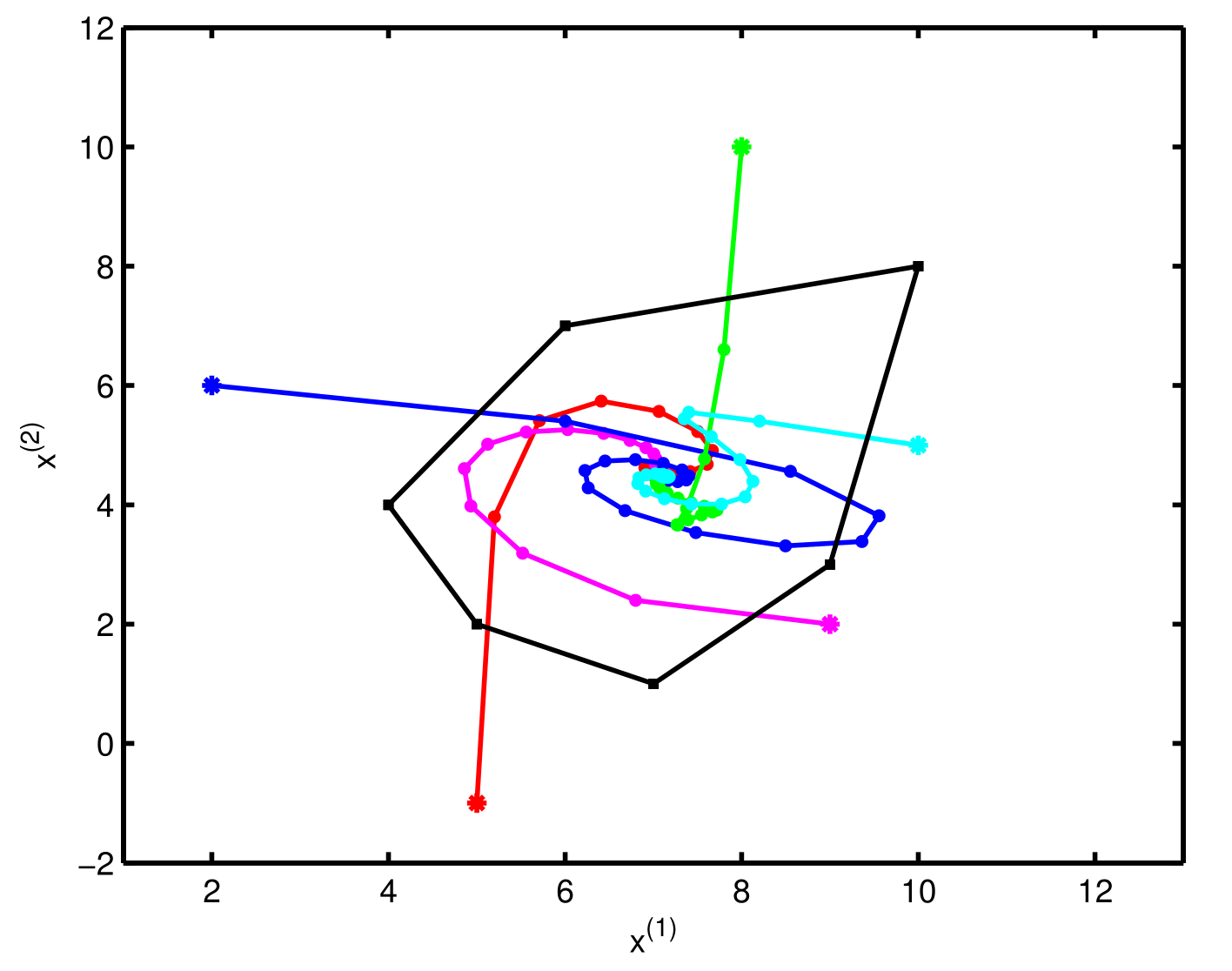
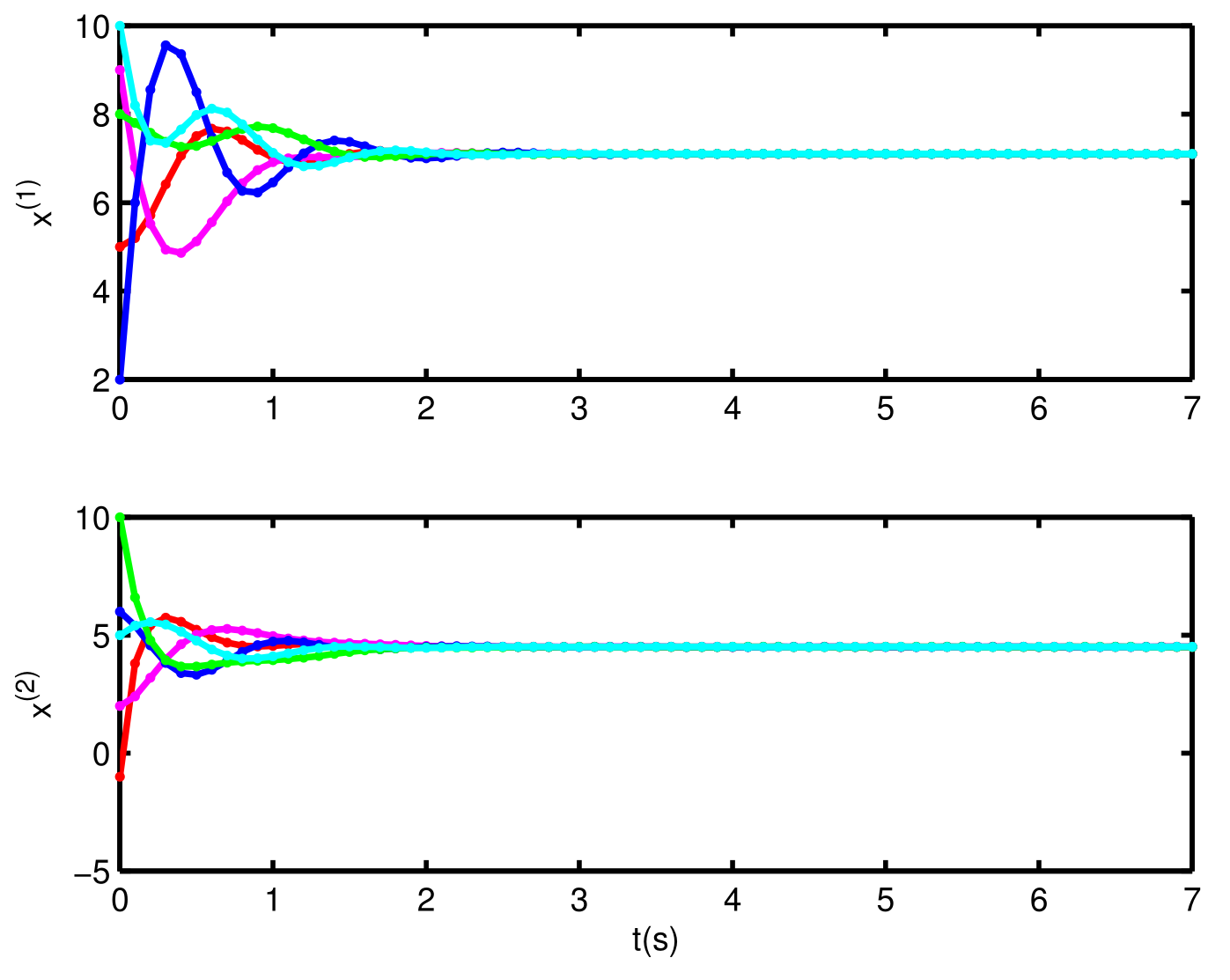
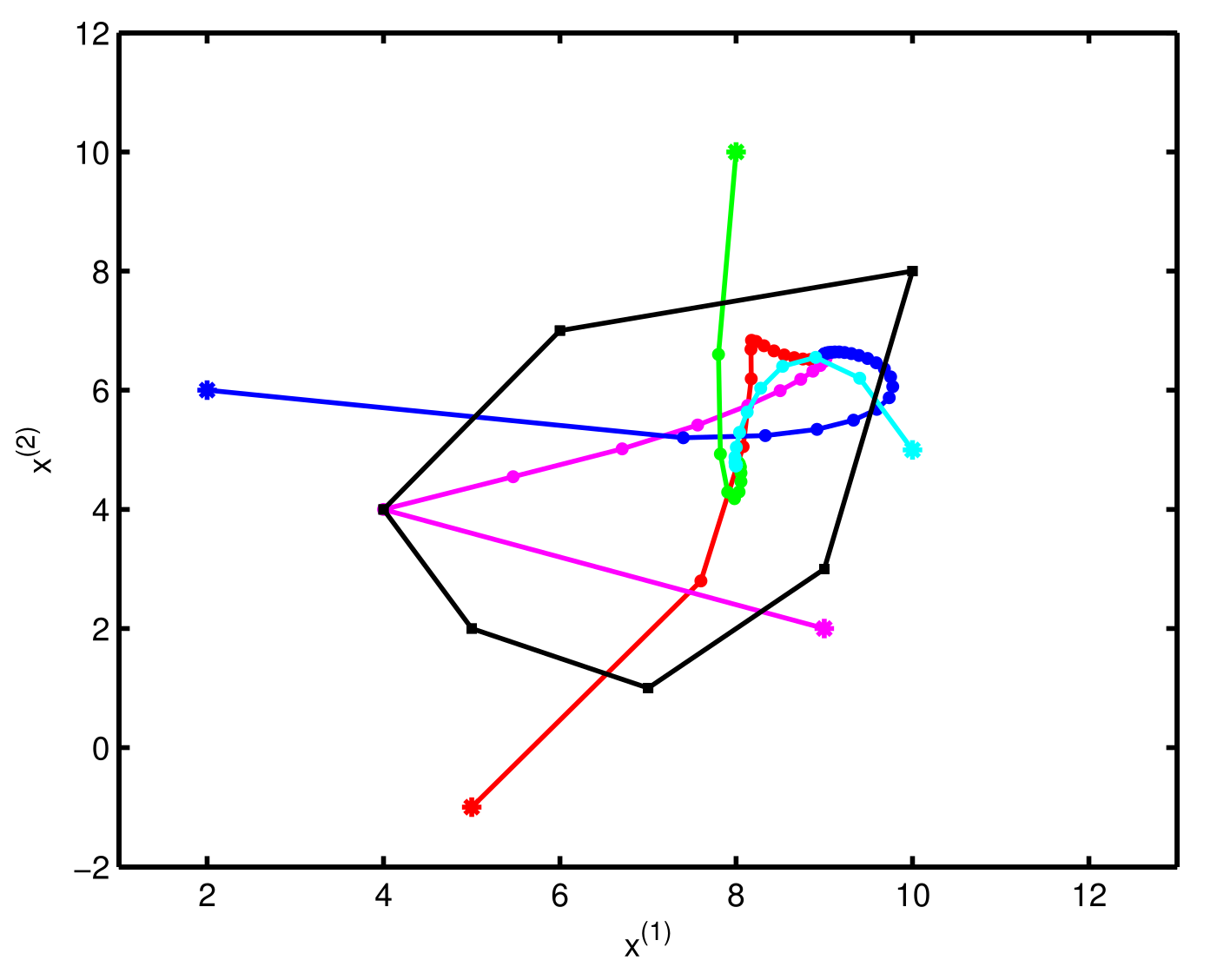
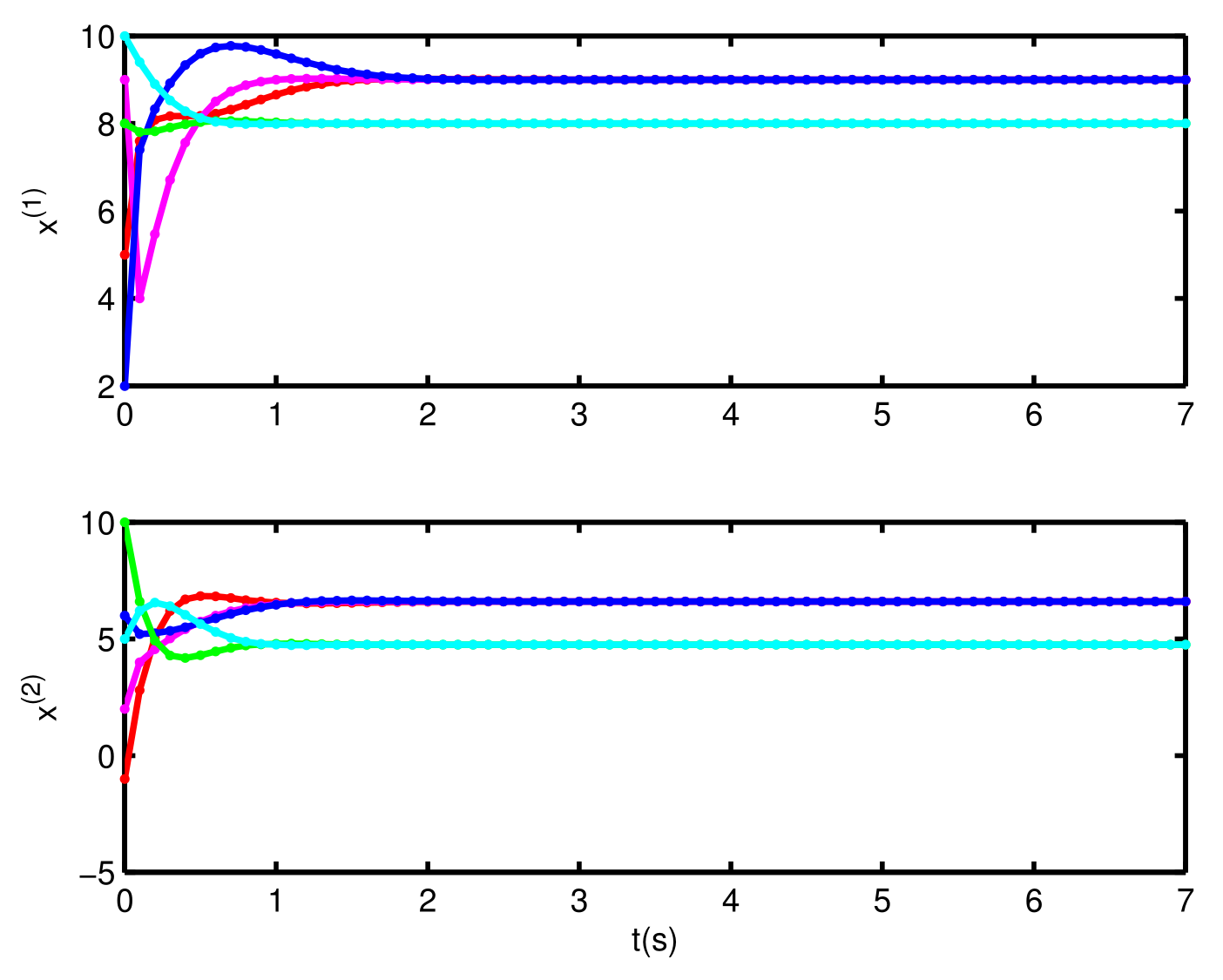
4. Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Automat. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Olfati-Saber, R. Distributed Kalman filter with embedded consensus filters. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005. [Google Scholar]
- Freeman, R.A.; Yang, P.; Lynch, K.M. Stability and convergence properties of dynamic average consensus estimators. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 338–343. [Google Scholar]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control; Springer: London, UK, 2008; Volume 27, pp. 71–82. [Google Scholar]
- Liu, D.J.; Liu, C.L. Consensus problem of discrete-time second-order multi-agent network with communication delays. In Proceedings of the 2009 Third International Symposium on Intelligent Information Technology Application, Nanchang, China, 21–22 November 2009; pp. 340–344. [Google Scholar]
- Li, S.; Guo, Y. Distributed consensus filter on directed switching graphs. Int. J. Robust Nonlinear Control 2015, 25, 2019–2040. [Google Scholar] [CrossRef]
- Rezaei, M.H.; Kabiri, M.; Menhaj, M.B. Adaptive consensus for high-order unknown nonlinear multi-agent systems with unknown control directions and switching topologies. Inf. Sci. 2018, 459, 224–237. [Google Scholar] [CrossRef]
- Rezaei, M.H.; Menhaj, M.B. Adaptive output stationary average consensus for heterogeneous unknown linear multi-agent systems. IET Control Theory Appl. 2018, 12, 847–856. [Google Scholar] [CrossRef]
- Liu, C.L.; Gu, X.Y.; Shan, L. Average-consensus tracking of ramp inputs via second-order multi-agent systems. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3442–3447. [Google Scholar]
- Zheng, M.; Liu, C.L.; Liu, F. Average-consensus tracking of sensor network via distributed coordination control of heterogeneous multi-agent systems. IEEE Control Syst. Lett. 2019, 3, 132–137. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W.; Atkins, E.M. A survey of consensus problems in multi-agent coordination. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 1859–1864. [Google Scholar]
- Rezaei, M.H.; Menhaj, M.B. Stationary average consensus protocol for a class of heterogeneous high-order multi-agent systems with application for aircraft. Int. J. Syst. Sci. 2018, 49, 284–298. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 1859–1864. [Google Scholar]
- Jiang, W.; Wen, G.; Meng, Y.; Rahmani, A. Distributed adaptive time-varying formation tracking for linear multi-agent systems: A dynamic output approach. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 8571–8576. [Google Scholar]
- Jiang, W.; Peng, Z.; Rahmani, A.; Hu, W.; Wen, G. Distributed consensus of linear MASs with an unknown leader via a predictive extended state observer considering input delay and disturbances. Neurocomputing 2018, 315, 465–475. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.C.; Ren, W.; Egerstedt, M. Distributed containment control with multiple stationary or dynamic leaders in fixed and switching directed networks. Automatica 2012, 48, 1586–1597. [Google Scholar] [CrossRef]
- Li, B.; Cheng, Z.Q.; Liu, Z.X.; Zhang, Q. Containment control of discrete-time multi-agent systems with multiple stationary leaders and time-delays. In Proceedings of the 2015 34th Chinese Control Conference(CCC), Hangzhou, China, 28–30 July 2015; pp. 7062–7066. [Google Scholar]
- Hua, Y.Z.; Dong, X.W.; Han, L.; Li, Q.D.; Zhang, R. Formation-containment tracking for general linear multi-agent systems with a tracking-leader of unknown control input. Syst. Control Lett. 2018, 122, 67–76. [Google Scholar] [CrossRef]
- Jiang, W. Fully Distributed Time-Varying Formation and Containment Control for Multi-Agent/Multi-Robot Systems. Ph.D. Thesis, Ecole Centrale de Lille, Villeneuve-d’Ascq, France, 2018. [Google Scholar]
- Wang, F.Y.; Liu, Z.X.; Chen, Z.Q. Containment control for second-order nonlinear multi-agent systems with aperiodically intermittent position measurements. J. Frankl. Inst. 2019, 356, 8706–8725. [Google Scholar] [CrossRef]
- Shi, L.; Xiao, Y.; Shao, J.L.; Zheng, W.X. Containment control of asynchronous discrete-time general linear multiagent systems with arbitrary network topology. IEEE Trans. Cybern. 2020, 50, 2546–2556. [Google Scholar] [CrossRef]
- Ding, Y.; Ren, W. Sampled-data containment control for double-integrator agents with dynamic leaders with nonzero inputs. Syst. Control Lett. 2020, 139, 104673. [Google Scholar] [CrossRef]
- Wang, F.Y.; Ni, Y.H.; Liu, Z.X. Containment control for general second-order multiagent systems with switched dynamics. IEEE Trans. Autom. Control 2020, 50, 550–560. [Google Scholar] [CrossRef]
- Liu, H.Y.; Xie, G.M.; Wang, L. Necessary and sufficient conditions for containment control of networked multi-agent systems. Automatica 2012, 48, 1415–1422. [Google Scholar] [CrossRef]
- Wang, Y.P.; Cheng, L.; Hou, Z.G.; Min, T.; Wang, M. Containment control of multi-agent systems in a noisy communication environment. Automatica 2014, 50, 1922–1928. [Google Scholar] [CrossRef]
- Rong, L.N.; Shen, H. Distributed PD-type protocol based containment control of multi-agent systems with input delays. J. Frankl. Inst. 2015, 352, 3600–3611. [Google Scholar] [CrossRef]
- Mu, X.W.; Liu, K. Containment control of single-integrator network with limited communication data rate. IEEE Trans. Autom. Control 2016, 61, 2232–2238. [Google Scholar] [CrossRef]
- Miao, G.Y.; Cao, J.D.; Alsaedi, A.; Alsaadif, F.E. Event-triggered containment control for multi-agent systems with constant time delays. J. Frankl. Inst. 2017, 354, 6956–6977. [Google Scholar] [CrossRef]
- Shao, J.L.; Shi, L.; Gong, L.S. Analysis of asynchronous containment control problem for discrete-time multi-agent systems. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; pp. 247–251. [Google Scholar]
- Han, T.; Li, J.; Guan, Z.H.; Cai, C.X.; Zhang, D.X.; He, D.X. Containment control of multi-agent systems via a disturbance observer-based approach. J. Frankl. Inst. 2019, 35, 2919–2933. [Google Scholar] [CrossRef]
- Liu, H.Y.; Chong, L.; Tan, M.; Hou, Z.G. Containment control of continuous-time linear multi-agent systems with aperiodic sampling. Automatica 2015, 57, 78–84. [Google Scholar] [CrossRef]
- Liu, T.F.; Qi, L.; Jiang, Z.P. Distributed containment control of multi-agent systems with velocity and acceleration saturations. Automatic 2020, 117, 108992. [Google Scholar] [CrossRef]
- Wang, D.; Wang, D.; Wang, W. Necessary and sufficient conditions for containment control of multi-agent systems with time delay. Automatica 2019, 103, 418–423. [Google Scholar] [CrossRef]
- Shan, L.; Liu, C.L. Average-consensus tracking of multi-agent systems with additional interconnecting agents. J. Frankl. Inst. 2018, 355, 8957–8970. [Google Scholar] [CrossRef]
- Chung, Y.F.; Kia, S.S. Distributed dynamic containment control over a strongly connected and weight-balanced digraph. IFAC-PapersOnLine 2019, 52, 25–30. [Google Scholar] [CrossRef]
- Huang, M.Y.; Liu, C.L. Containment-rendezvous control for first-order multi-agent systems. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 4885–4890. [Google Scholar]
- Lin, Z.Y.; Francis, B.; Maggiore, M. Necessary and sufficient graphical conditions for formation control of unicycles. IEEE Trans. Autom. Control 2005, 50, 121–127. [Google Scholar]
- Parks, P.C.; Hahn, V. Stability Theory; Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Lestas, I.; Vinnicombe, G. Scalable robustness for consensus protocols with heterogeneous dynamics. IFAC Proc. Vol. 2005, 38, 185–190. [Google Scholar] [CrossRef] [Green Version]
- Desoer, C.A.; Wang, Y.T. On the generalized Nyquist stability criterion. IEEE Trans. Autom. Control 1980, 50, 187–196. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, T.; La, H.M.; Le, T.D.; Jafari, M. Formation control and obstacle avoidance of multiple rectangular agents with limited communication ranges. IEEE Trans. Control Netw. Syst. 2016, 4, 680–691. [Google Scholar] [CrossRef]
- Tran, V.P.; Garratt, M.; Petersen, I.R. Switching time-invariant formation control of a collaborative multi-agent system using negative imaginary systems theory. Control Eng. Pract. 2020, 95, 104245. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, M.; Liu, C.; Shan, L. Containment Control of First-Order Multi-Agent Systems under PI Coordination Protocol. Algorithms 2021, 14, 209. https://doi.org/10.3390/a14070209
Huang M, Liu C, Shan L. Containment Control of First-Order Multi-Agent Systems under PI Coordination Protocol. Algorithms. 2021; 14(7):209. https://doi.org/10.3390/a14070209
Chicago/Turabian StyleHuang, Mingyang, Chenglin Liu, and Liang Shan. 2021. "Containment Control of First-Order Multi-Agent Systems under PI Coordination Protocol" Algorithms 14, no. 7: 209. https://doi.org/10.3390/a14070209
APA StyleHuang, M., Liu, C., & Shan, L. (2021). Containment Control of First-Order Multi-Agent Systems under PI Coordination Protocol. Algorithms, 14(7), 209. https://doi.org/10.3390/a14070209