1. Introduction
Despite their maturing technology, robotic solutions still face many challenges related mainly to their design and control techniques. In practical applications, control of automated devices is often formulated depending on the nature of the operational task for which they are designed. Several research works have been realized in the past few years to develop optimal and reliable controllers, ensuring various reliability goals. For instance, authors in [
1] investigated enhancing the reliability of control systems by using multiple controllers for a given plant, which is a delicate way to improve the reliability in control structures subject to both the controllers and plant failures. In [
2], a design approach of reliable centralized and decentralized controllers is proposed, such that the resulting control systems remain stable and accurate despite sensor or actuator disturbances. Moreover, reliable H-infinity controllers for linear systems were designed in [
3], in such a way that they ensure the asymptotic stability of the control systems, mainly when perturbations occur in some control components (sensors and actuators). These classical control strategies are generally designed based on dynamic and/or kinematic models and simplified control schemes. However, the drawback of these deterministic approaches is the lack of techniques to prove the robustness analysis of such controllers to different uncertain parameters in the plant.
Significant advances in stabilizing uncertain systems with parametric uncertainties have been recently treated in a very different way. Among the techniques used to achieve this end, interval analysis methods (IA) can provide guaranteed solutions to deal with complex nonlinear problems and to manage various uncertainties involved in the hardware and software parts of the automated device [
4]. Indeed, IA tools turn out to be more promising and reliable to handle all the noises and uncertainties in the experimental and theoretical data, contrary to these classical approaches that are generally based on simplified models with deterministic values. IA methods are extremely popular in several research fields due to their efficiency and reliability in order to achieve a robust control in the presence of model uncertainties [
5,
6] or for state estimation [
7]. For example, a robust controller based on interval arithmetic for constrained discrete-time nonlinear systems with additive uncertainties is presented in [
5]. In addition, authors in [
6] developed a robust feedback controller synthesis such that all the unknown parameters are assumed to vary between known bounds. This controller guarantees at each time step that the closed-loop system behavior is greater than the lower bound of the set-point interval and is lower than its upper bound.
Model-based Predictive Control (MPC) methodology (also known as the receding horizon control or the moving horizon control) has become a powerful control technique widely used in a large number of areas (e.g., the automotive industry and chemical processes [
8]). There are several reasons for this: (i) its capability to anticipate the future on the reference trajectory (i.e., future changes in set-point), and (ii) its ability to handle nonlinearities of multi-variable systems as well as all the system’s constraints, i.e., input and state limits. The primary purpose of the linear and nonlinear MPC is to apply a plant model to predict its behavior along a receding horizon. At each sampling time, the MPC technique computes the optimal control input that minimizes some cost functions and fulfills all the safety constraints (e.g., actuators position, speed, and acceleration bounds). Overall, it has been proven that the MPC technique is much more practical and sophisticated to solve linear and nonlinear control problems [
9,
10,
11,
12,
13]. Amongst the existing works, a real-time constrained MPC with safety and stability constraints is proposed in [
9,
10], where all the constraints are expressed as inequalities with respect to the optimization variable. Furthermore, a linear time-varying MPC method is designed in [
12,
13]. It is based on the online exact linearization of the nonlinear model so as to formulate the optimization problem completely as a Quadratic Program (QP). It can be easily handled by linear solvers to decrease the computational complexity. Nevertheless, they assume that uncertainties, related to the system’s modeling and the degree of correctness of measurements, are omitted. Consequently, a control strategy in a guaranteed way is required to ensure robustness toward all the uncertainties occurring in dynamic parameters’ estimation.
Currently, many researchers apply IA methods to synthesize a guaranteed linear or nonlinear MPC controllers [
14,
15]. These guaranteed methods allow the calculation of smooth and safe input intervals over the prediction horizon, i.e., the control vector is expressed here as an interval-vector (or a box that is the Cartesian product of intervals).
Appendix A gives a brief presentation outlining different IA tools. For instance, authors in [
14] use IA methods to build a new nonlinear MPC law considering the discrete system. It is based on forward-backward contraction using a dynamic model to compute feasible and admissible inputs. This method allows authors to calculate a validated control for an inverse pendulum system. Other techniques include the adjoint method for sensitivity analysis enabling the handling of the rate of change of the system dynamics considering the control variable [
6,
16,
17,
18]. Otherwise, this last approach is used to calculate the derivative of dynamics with respect to the input variable that must be limited between some bounds. In addition, a robust and guaranteed MPC of constrained discrete-time nonlinear systems with additive uncertainties is designed in [
6,
17] to quantify different uncertainties. Moreover, a branch-and-bound algorithm was applied in [
15] to synthesize a NMPC controller. This combinatorial optimization algorithm is promising but needs high computation time to obtain optimal solutions. In addition, a reliable nonlinear MPC via interval arithmetic is developed in [
19]. This algorithm uses validated simulation and branching methods to create input interval-vectors (or input boxes) and respect the system’s constraints by consecutive bisection of the initial feasible boxes of actuator’s inputs.
Contributions: This paper focuses on developing a new validated and reliable nonlinear model predictive control (NMPC), which is more specifically designed using an uncertain mathematical model. It encompasses two main research dimensions. (i) This paper is an extension of our previous work introduced in [
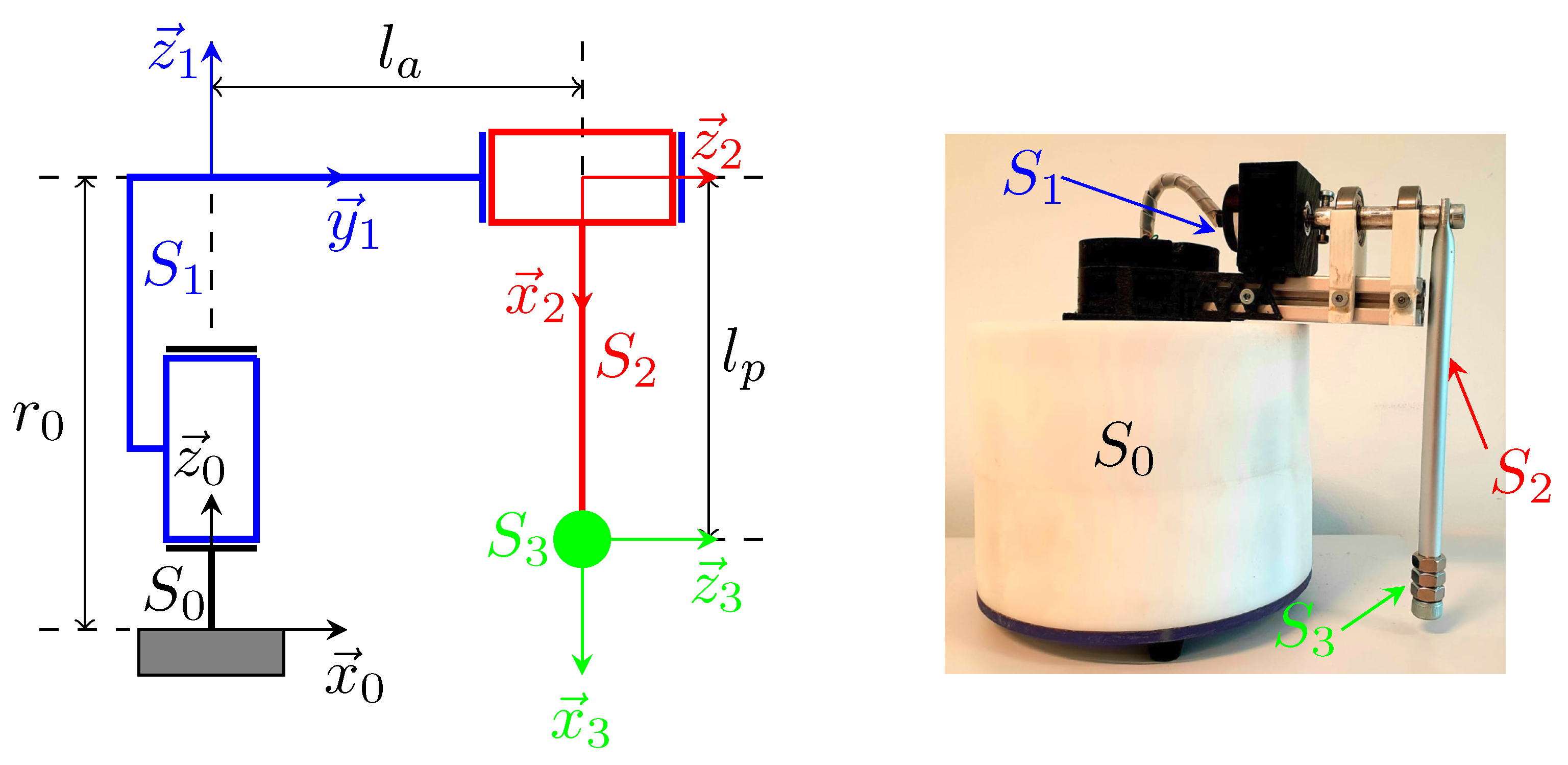
20] that aims to identify in a guaranteed way the inertial and frictional parameters of our new inverted pendulum (manufactured in our lab and shown in
Figure 1). The IA and set-inversion tools have been deployed to express all the needed parameters as intervals instead of constants’ values so that the coverage ratio between the physical reality and the mathematical model is significant. (ii) The second contribution lies in the synthesis of a validated NMPC strategy relying on the previous guaranteed identification to compute smooth and safe input intervals. These approaches have been investigated through various simulations with uncertain high-order ordinary differential equations (ODEs) describing the system’s behavior. The validated simulations are performed using our DynIbex (DynIbex Library:
https://perso.ensta-paris.fr/chapoutot/dynibex/ (accessed on 19 August 2021)) library (a sophisticated solver of ODEs using Runge–Kutta schemes [
21]) and several experiments on the actual nonlinear inverted pendulum.
The remainder of this paper is organized as follows: firstly, an overview of the direct dynamic model of our inverted pendulum is presented in
Section 2. Secondly,
Section 3 introduces the guaranteed NMPC approach based on IA. Thirdly, simulation and experimental results and discussions are reported in
Section 4, on which the guaranteed identification results using the SIVIA algorithm (Set-Inversion Via Interval Analysis [
7]) are recapped, and the capabilities of the proposed controller are illustrated via the nonlinear inverted pendulum. Finally,
Section 5 closes the paper by summarizing the contribution and providing an overview of the future work.
4. Experiment Results
The control framework introduced in this paper is applied for the stabilization of the nonlinear inverted pendulum shown in
Figure 1. The pendulum is actuated by a DC motor whose angular speed is the input variable. It is controlled using a Phidget Motor Control. This control card is connected to the laptop via a USB cable to control the motor’s velocity, using C language.
To evaluate the validated NMPC, we will initially summarize in
Section 4.1 the guaranteed identification results and its validation using the identified subsets of parameters. In the second place, we will validate the proposed controller in
Section 4.2 through simulation tests and then experiments using the inverted pendulum.
4.1. Guaranteed Dynamic Model Identification
The guaranteed identification of dynamic parameters
as can be seen by the dynamic model (
1) was proposed in [
20]. These parameters are estimated as intervals instead of real numbers to account for all the uncertainties and errors related to the sensors measurements and the system modeling. The identification approach is based on the IA and set-inversion techniques (SIVIA algorithm) to determine the feasible sets of coefficients [
7]. A brief resume of the SIVIA algorithm principle is given in
Appendix A. The feasible sets of all the dynamic parameters are recapped in
Table 1.
The DC motor and gearbox are of type MDP-Maxon, and their characteristics are provided by the manufacturer. Here is a recap of their properties: the motor inertia = kg·m, its no-load speed = 11,700 tr·min, the slope speed-torque = 34,000 tr·min·N·m, the motor and gearbox efficiencies and , and gear ratios and .
To demonstrate the usefulness of our identification, we can solve in a complete and validated way the IVP-ODEs (
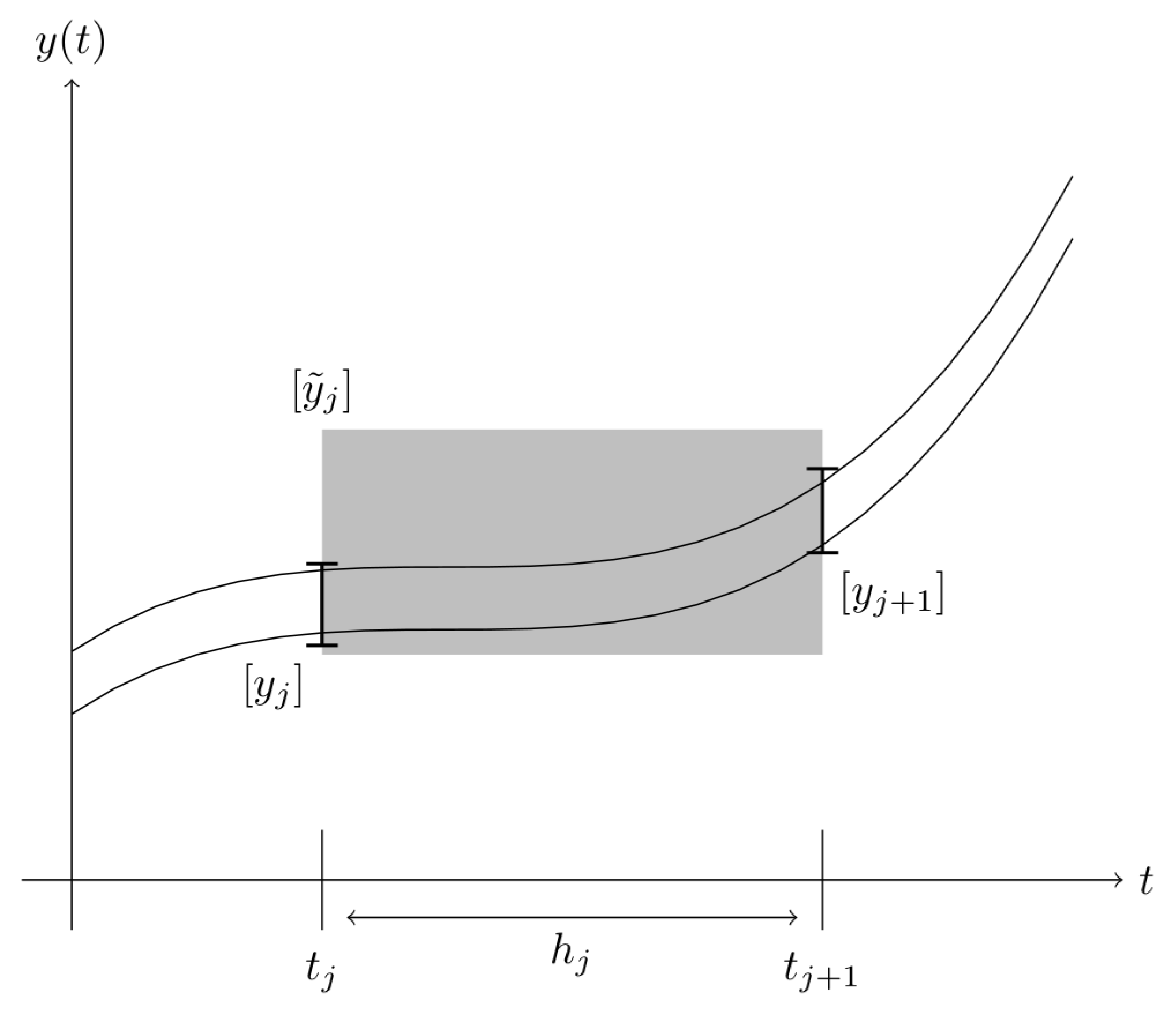
5) using the identified parameters. The set of possible tight enclosures
at a sequence of time-instants
are calculated. To do so, our library DynIbex is employed to solve this IVP-ODEs [
21]. Furthermore, the guaranteed identification is compared to the traditional least square method identification (LSMI) (where the dynamic parameters are estimated as constant values) to show its efficiency.
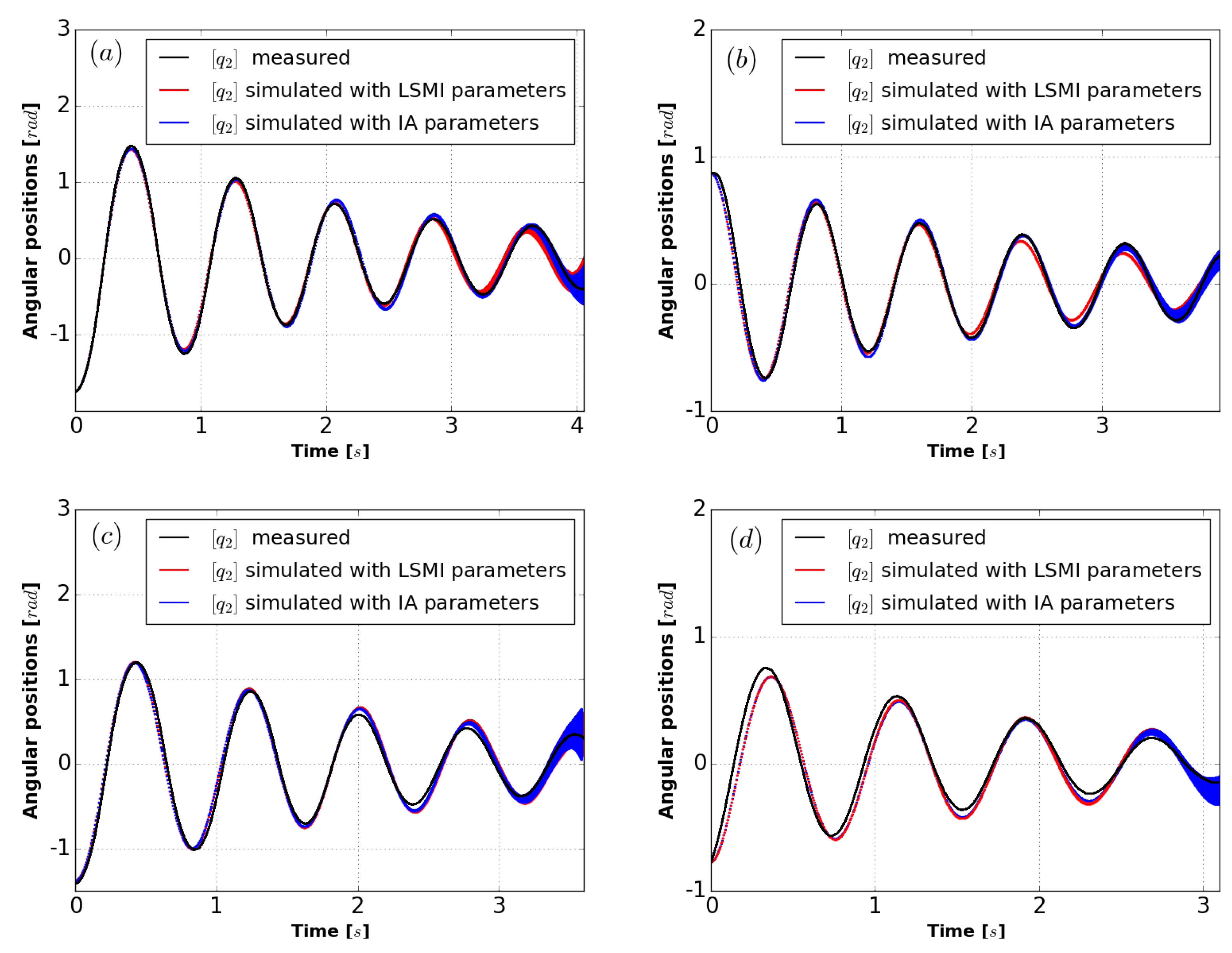
Figure 3 shows the measured pendulum angle
(black lines), as well as the ones calculated with the identified parameters with LSMI (red lines) and IA (blue lines) approaches. All the model validation tests are conducted under the same settings and conditions (e.g., same initial conditions
and
, same inputs, etc.). The simulation duration is fixed to be 4 s and the precision of
. We can notice that the simulated tubes of the pendulum angle
given by the sophisticated solver DynIbex, using IA and LSMI parameters, are quite similar to the real measured pendulum angle. Nonetheless, the simulated
with IA parameters comply as closely as possible with the measured one at different initial conditions. All this is due to the fact that all the system variables are taken here as intervals characterizing different uncertainties.
In order to emphasize the potential capabilities of the predicted model, the associated coverage rates can be computed. We evaluate the number of cases where the measurements data are included in the simulated tubes, and then the percentage of inclusion is calculated for each tested scenario. In other words, it is calculated by checking at each time step whether the time variable related to the measurement is included in the simulated time interval
. If so, we inspect if the corresponding measure
is included in the simulated tube
given by the DynIbex library. Then, the coverage rate can be approximated to be
, where
is the number of times that each sampled time is incorporated in the simulated time interval, and
is the one related to the second condition regarding
. The computed values are recapped in
Table 2. By the way, this criterion is too strict to test, which explains the small calculated percentages. This is due to the timing lag between the measurement and the estimated model. Even with this issue, the coverage ratios obtained using IA parameters indicate a good match with the measurements process. It also confirms that the model is estimated with high precision when the uncertainties are considered.
Overall, the experimental results provided by the guaranteed identification of inertial and frictional parameters are more relevant than those obtained by the classical LSMI. Indeed, the estimation approach based on IA and set inversion techniques allows us to successfully identify these coefficients as intervals considering all the errors and uncertainties related to the sensors and the system modeling. Despite its proven effectiveness to more closely approximate the model output to the actual system’s behavior, it still has some drawbacks. The main ones are related globally to the computation time, which depends mainly on the number of parameters and the initial domain. This issue can be enhanced with a contraction approach [
24].
4.2. NMPC Results
4.2.1. Simulation Results
In the simulations, the parameters of this proposed validated NPMC are tuned as: prediction horizon , control sampling time ms and the final time of the simulation s. The safety saturation on state variables are: , rad·s rad·s, , rad·s rad·s, and the DC motor’s torque constraints are N·m; 8.05 N·m]. The reference interval of the desired pendulum arm is . The tolerance parameter applied for the bisection procedure is adjusted as . Since the filtering and branching algorithm begins from the admissible input domain N·m; 8.05 N·m], it can lead to approximately branches with . The interval cost function is computed only in the optimization process using these weighting matrices and .
Several software tools have been developed to simplify the resolution of the validated NMPC strategy via interval analysis. These tools are globally in the form of libraries to be integrated into a program (e.g., DynIbex library [
21], Numerica [
25] or RealPaver [
26]). However, it has been shown that these solvers are not much more practical due to their high computation time. In other words, the fast convergence of this kind of solvers is not guaranteed over a finite time (i.e., extreme long response time to get the solution of the problem). That’s why the real-time validation of this guaranteed approach is not easy to realize. To do so, it is divided into two steps: a numerically offline calculation of the input variables via validated simulations and then the injection of these inputs into the physical pendulum.
Two scenarios have been executed with different initial conditions on the angular pendulum position
to discuss the capabilities of the proposed controller.
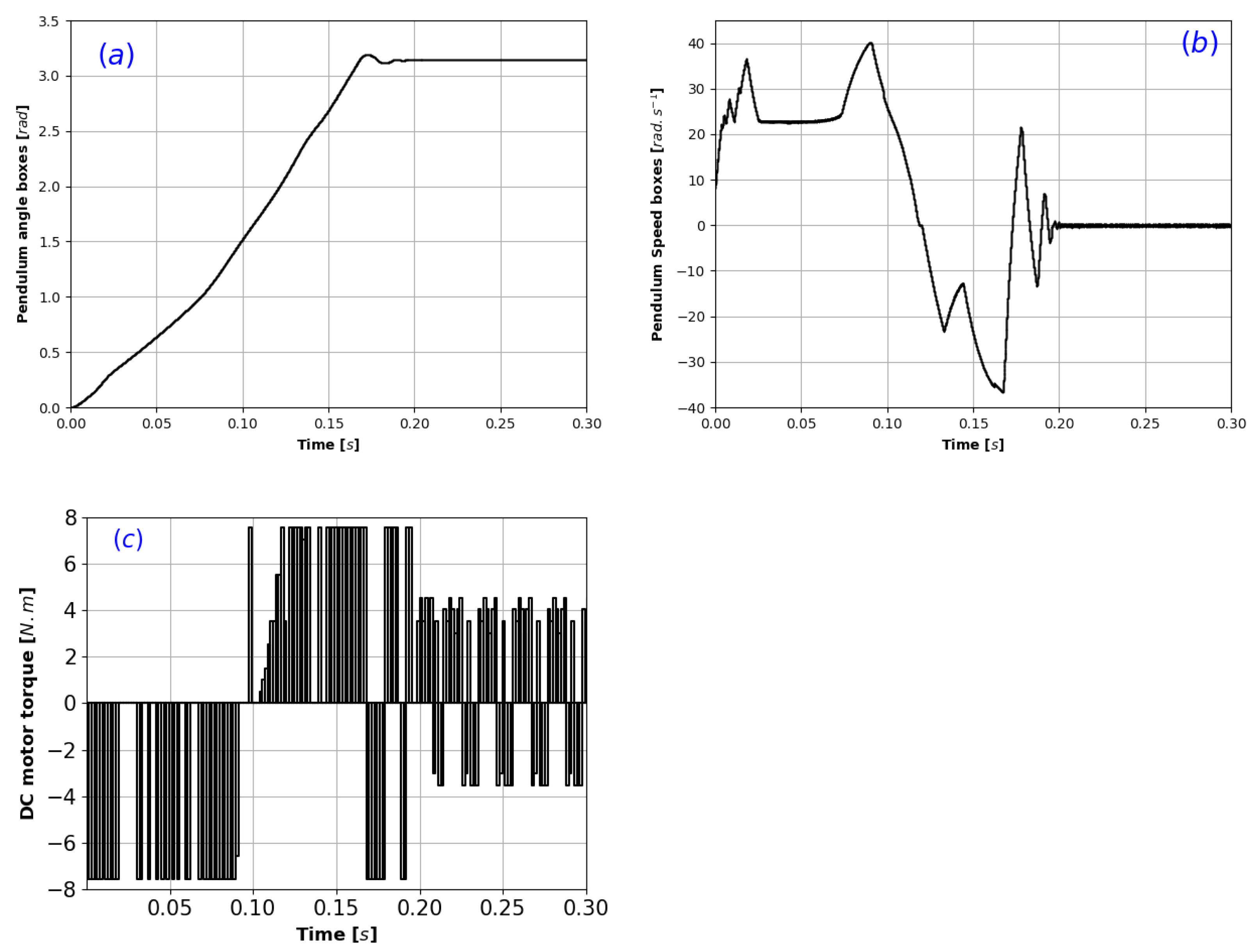
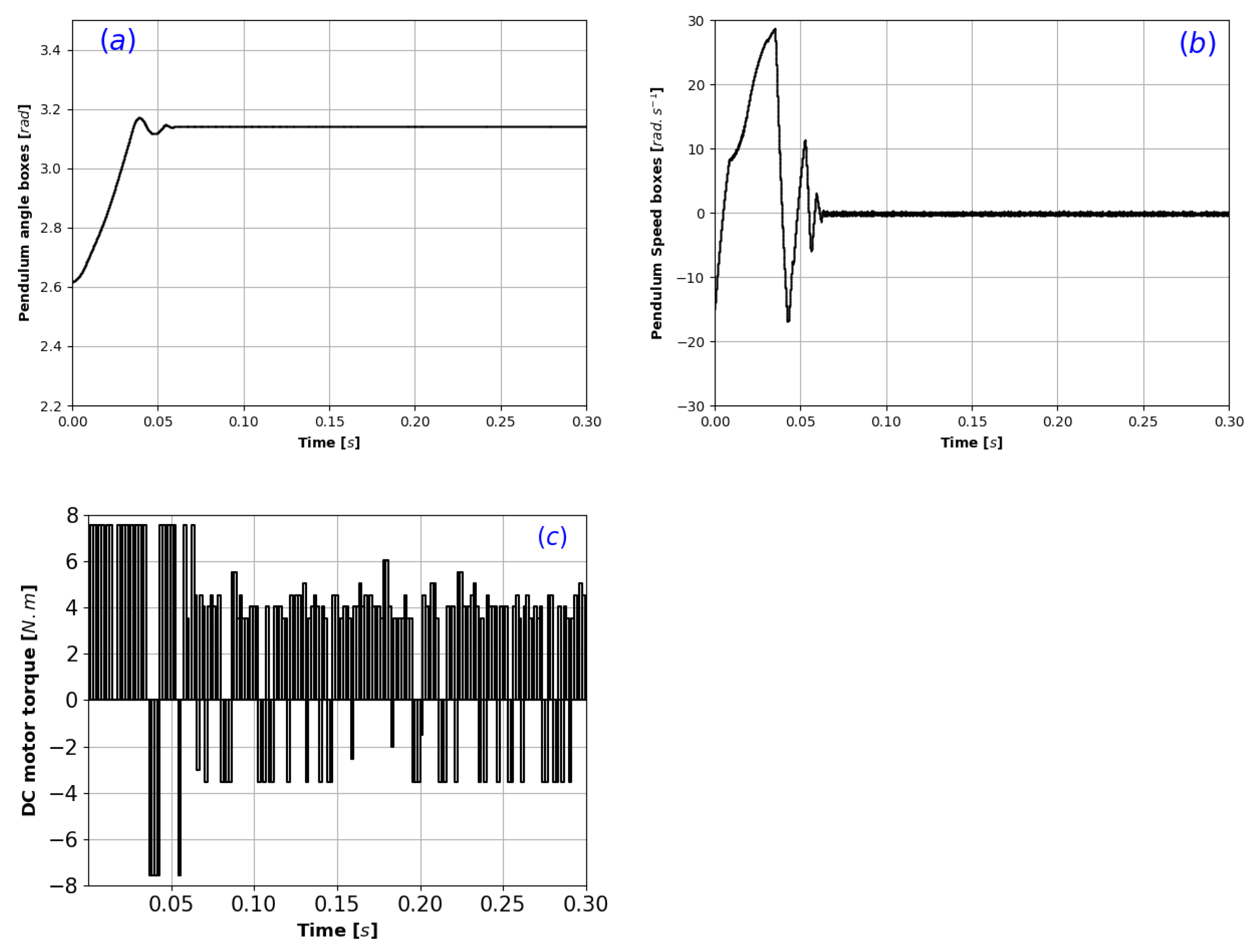
Figure 4a–c display the results of the first scenario starting from
and
Figure 5a–c show those of the second one starting from
. As can be seen from
Figure 4a, the pendulum arm starts from the downward position, and it is stabilized via the validated NMPC in its vertical position interval
with a small settling-time (around
s). Similarly, the simulation has also been executed when the initial position is close to the desired position
. The generated enclosures of the inverted pendulum position are plotted in
Figure 5a. As the previous results, the validated NMPC succeeds in stabilizing the pendulum feasibly in its terminal position.
On the other hand, the calculated tubes of the pendulum’s velocity are depicted in
Figure 4b and
Figure 5b. As can be noticed in both of these scenarios, the validated velocity respects the imposed constraints and stagnate around zero when the pendulum reaches its final desired position. In addition, the torques applied by the DC motor for each tested scenario are shown in
Figure 4c and
Figure 5c. The relationship between the motor’s velocity and torque is given by Equation (
3). In the first case, a strong input variable with the bang-bang process is applied to enable the pendulum to catch the equilibrium and stabilize in its terminal reference interval (see
Figure 4c). Since the pendulum is stabilized, the torque applied by the system’s actuator changes the sign to maintain the reference interval. In the second case, the actuator applies maximum inputs for a short time to try to reach the desired interval (see
Figure 5c). All the calculated torques fulfill the system’s intrinsic constraints.
4.2.2. Experimental Validation Using the Inverted Pendulum
To further show the usefulness of the proposed controller, it is tested on the experimental platform (
Figure 1). As mentioned before, the real-time implementation of the validated strategy cannot be accomplished due to the high computation time of interval methods. In addition, we are currently working to improve this point by adopting parallel computation and relaxation methods. Consequently, we inject the computed input components into the control part of the pendulum that must somehow behave as the simulated model. Indeed, the dynamic model is proven to be as close as possible to the system’s actual behavior (see
Section 4.1).
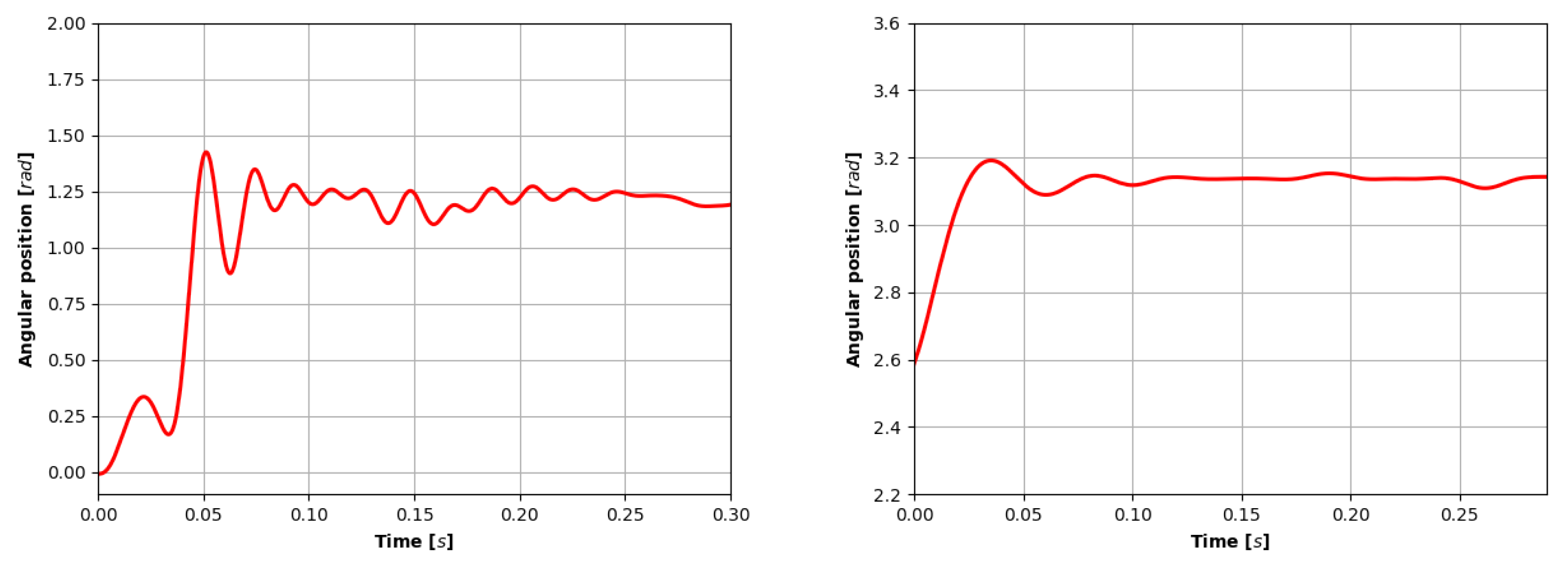
Figure 6 shows the measured pendulum angle for the tested scenarios, starting from
and
. The stabilization is performed in an open-loop by incorporating the simulated input data into the DC motor controller (the computed inputs are drawn in
Figure 4c and
Figure 5c). Compared to the simulation results, the calculated control inputs stabilize the inverted pendulum in the steady-state regime. The second scenario gives coherent results enabling the pendulum to be stabilized around the target position
thanks to the validated NMPC (see
Figure 6 (Right)). However, for the first scenario (starting from
), we have some synchronization problems between the DC motor sampling period (around 0.028 s) and the sampling horizon of the NMPC method
. This is due to the lack of good deeds that the system’s actuator executes at the right moment and its sensibility to weak signals that destabilize it. Despite these issues, the proposed NMPC enables the system to reach another equilibrium position around
(see
Figure 6 (Left)), so we will try to handle this issue separately.
To sum up, the validated NMPC seems more promising for enabling the system to successfully converge to the reference target with high accuracy and small settling time. The imposed state and control bounds are respected, critical, and necessary for the pendulum’s stability and safety. Nevertheless, the computation time of the domain is remarkable due to a large number of bisections of the initial input domain and the high computation time required by validated simulations.
5. Conclusions and Future Works
The research presented in this paper focuses on developing a reliable and validated nonlinear model predictive control (NMPC), which is more specifically designed using an uncertain mathematical model. The proposed controller is based on validated simulation mixed with interval analysis techniques to handle the system’s nonlinearities and uncertainties. Two different procedures are employed: branching procedure to calculate the valid input intervals from an uncertain nonlinear model, allowing the convergence to the set-point interval and the system constraints’ insurance. From the generated branches, the optimization procedure is applied to determine the sub-optimal control variable. The efficiency and robustness of the proposed method are validated through numerical and experimental tests using a new nonlinear inverted pendulum.
As regards ongoing works, we will focus on studying two issues: firstly, the computational complexity improvement of the validated simulation methods by taking into consideration contraction methods and parallel computing strategies; secondly, the projection of the validated NMPC on a complex mechatronic system (ROV—Remotely Operated underwater Vehicle). It allows us to perform some tasks (trajectory tracking) in the aquatic environment while respecting all the system’s constraints. In addition, another relevant aspect enabling completing a system’s autonomy is online estimation of the model’s parameters via nonlinear observers and interval methods with respect to the environmental conditions, e.g., aerodynamic coefficients. This issue allows for reaching high accuracy and stability of the trajectory tracking task.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}