
V-SOC4AS: A Vehicle-SOC for Improving Automotive Security

 , , , and
, , , and 
Abstract
:1. Introduction
- A novel approach, vehicle-security operation center for automotive security (V-SOC4AS), to detect, respond, and prevent attacks that can occur in the automotive context. The V-SOC 4AS was developed not to replace existing solutions such as IDS, but to integrate them to support the detection, response, and prevention [14]. The goal is to improve cybersecurity and define new cyber kill chain models. This is possible as the analysis and monitoring take place in real-time and not offline, thus reducing the detection time and providing further support for response activities. The first experiment has been done considering two state-of-the-art attacks (DoS and fuzzing).
- The use of security information and event management (SIEM) to monitor each subsystem for intra-vehicle communication management, namely the controller area network (CAN), local interconnect network (LIN), FlexRay, and media oriented systems transport (MOST), and Ethernet. Each of them has vulnerabilities and security issues [6,20]. The research goal is to define a solution that can improve and redefine security controls in the three functional areas: detection, response, and prevention. Specifically, in this first step, the work focuses on the CAN protocol and the use of IBM QRadar as a SIEM.
- The possibility to identify not only the attack but also the type and the pattern of attack. This allows work on the threat, attack vector, and risk associated with a given vehicle component. In the literature, most works use binary classifiers such as IDSs for detection without defining the attack type. Therefore, V-SOC4AS allows for the investigation of how different attack types can be identified and how AI models can be integrated (in the future) to improve the security lifecycle in this context. The vehicle was simulated using an open-source dataset, specifically the exchange of CAN messages between an open-source tool and the SIEM recreating the V-SOC4AS. The proposed method can detect attacks without changing the CAN protocol. Therefore, it is also applicable to any vehicle that uses the CAN.
2. Related Work
3. Controller Area Network (CAN)
- Arbitration field (11 bits CAN 2.0A) establishes the priority of the message, 0-bit is dominant while 1-bit is recessive. When two or more nodes transmit a data frame at the same time, if node A has a dominant bit and node B has a recessive bit, node A wins the arbitration and can send the message on the bus.
- Control field (4 bits): consists of data length control (DLC) and contains the length of the data payload.
- Data field (64 bits): contains the payload.
- The main issue of the CAN protocol is that it does not implement any security mechanism against cyber-attacks [2].
Threat on CAN Bus
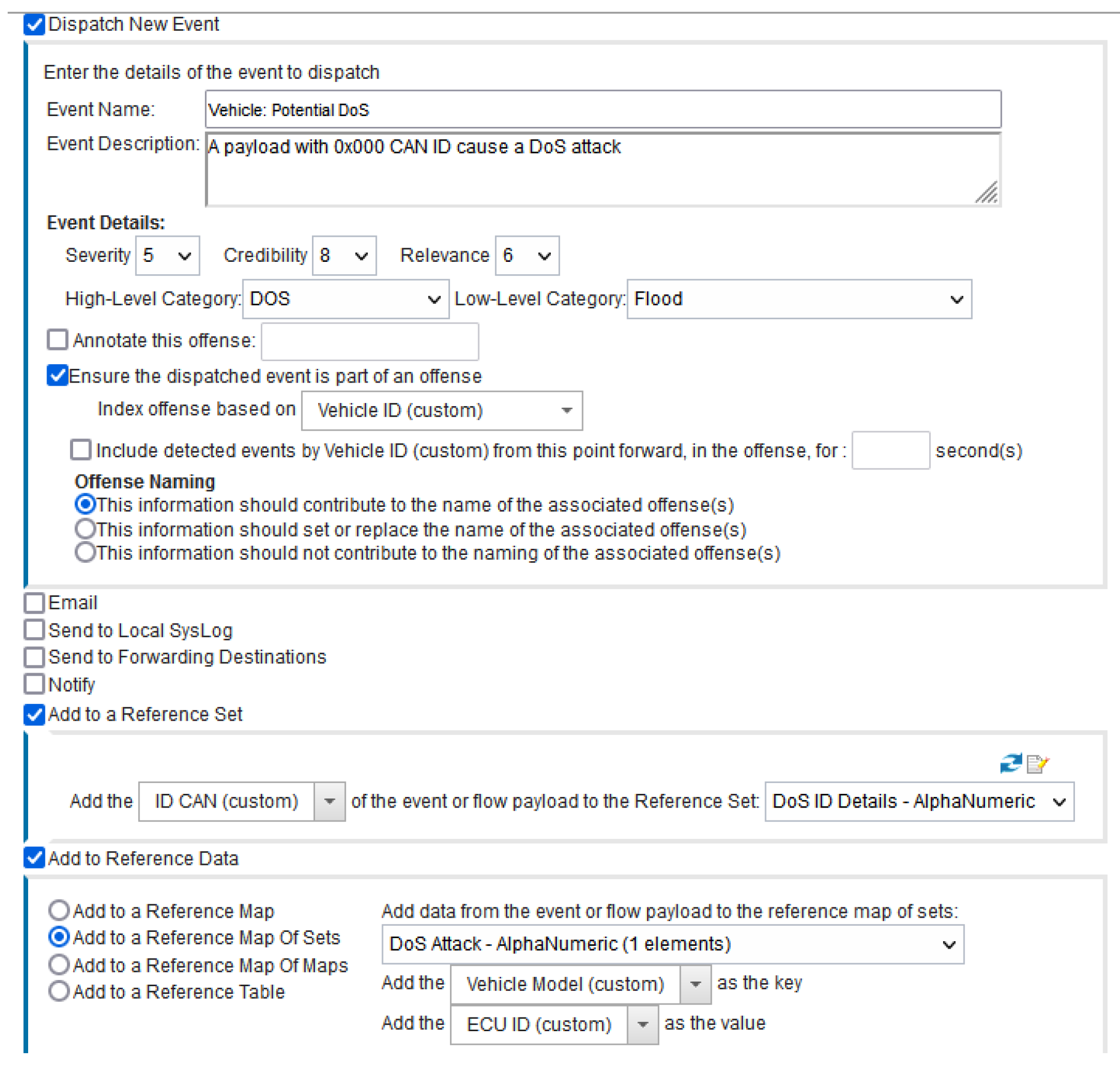
- DoS: It consists of injecting a low identifier packet to have a high priority in the bus. Most of the datasets in the literature that simulate this type of attack set the arbitration field with the value “0 x 000” as hexadecimal since it is the lowest possible.
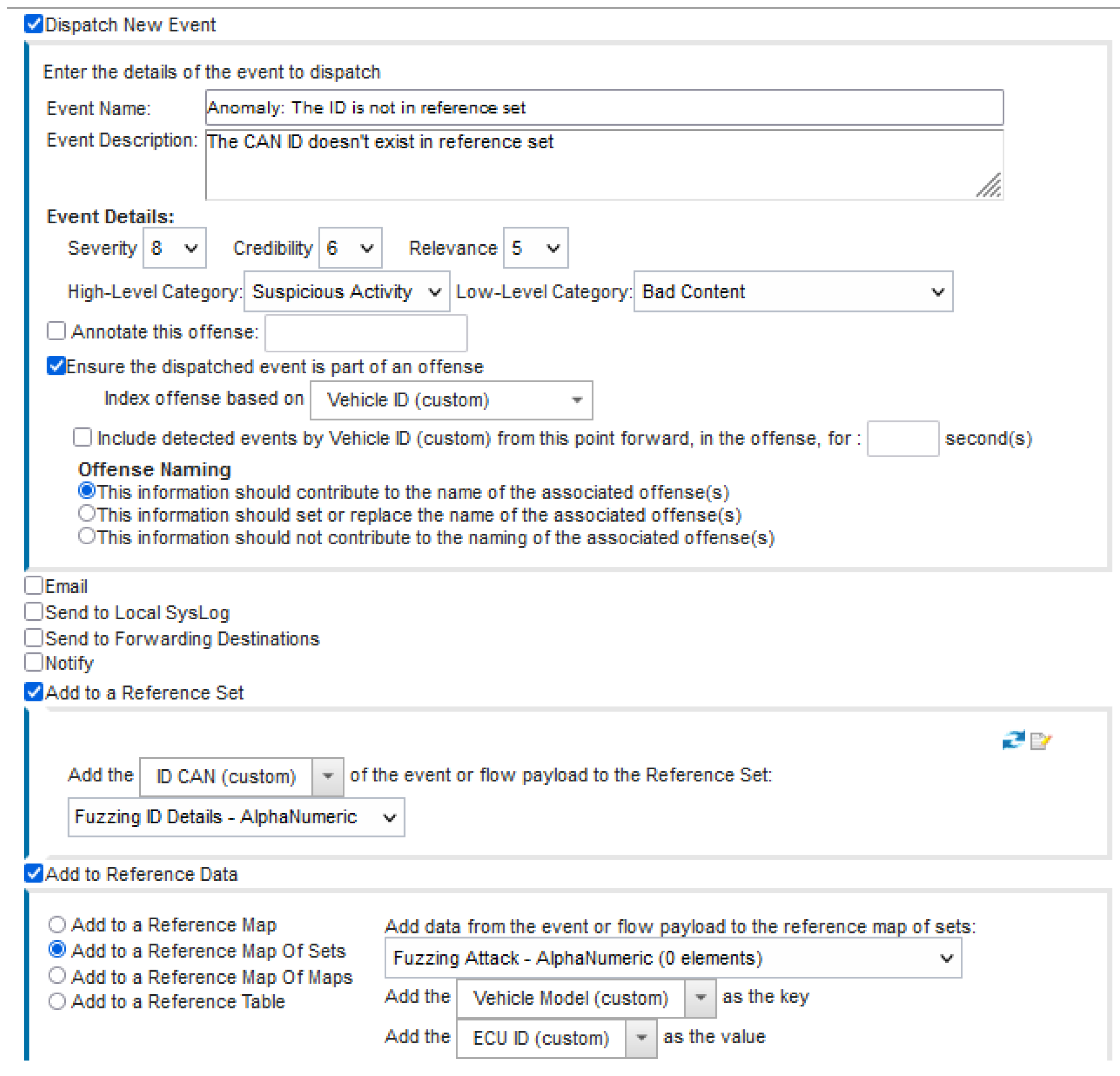
- Fuzzing: It consists of recreating CAN messages that have a completely random value of both arbitration and data field.
4. V-SOC4AS: Vehicle-SOC for Improving Automotive Security
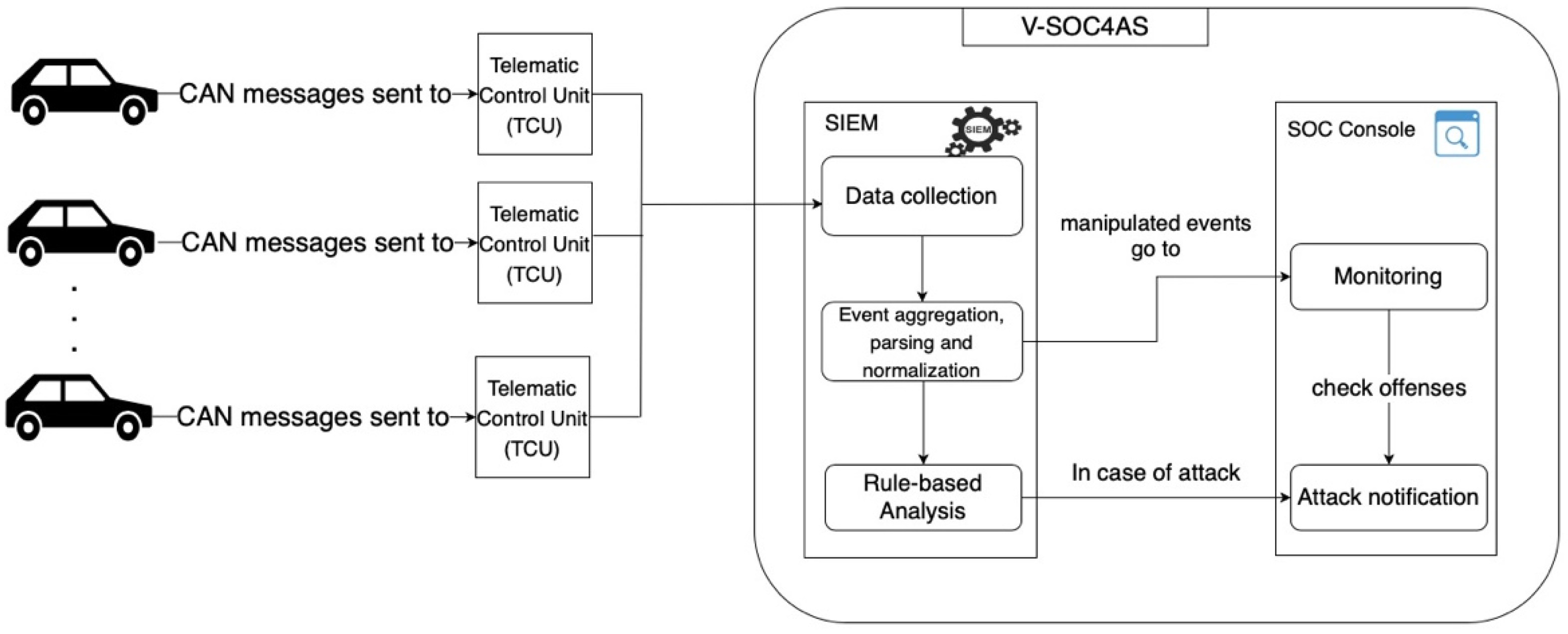
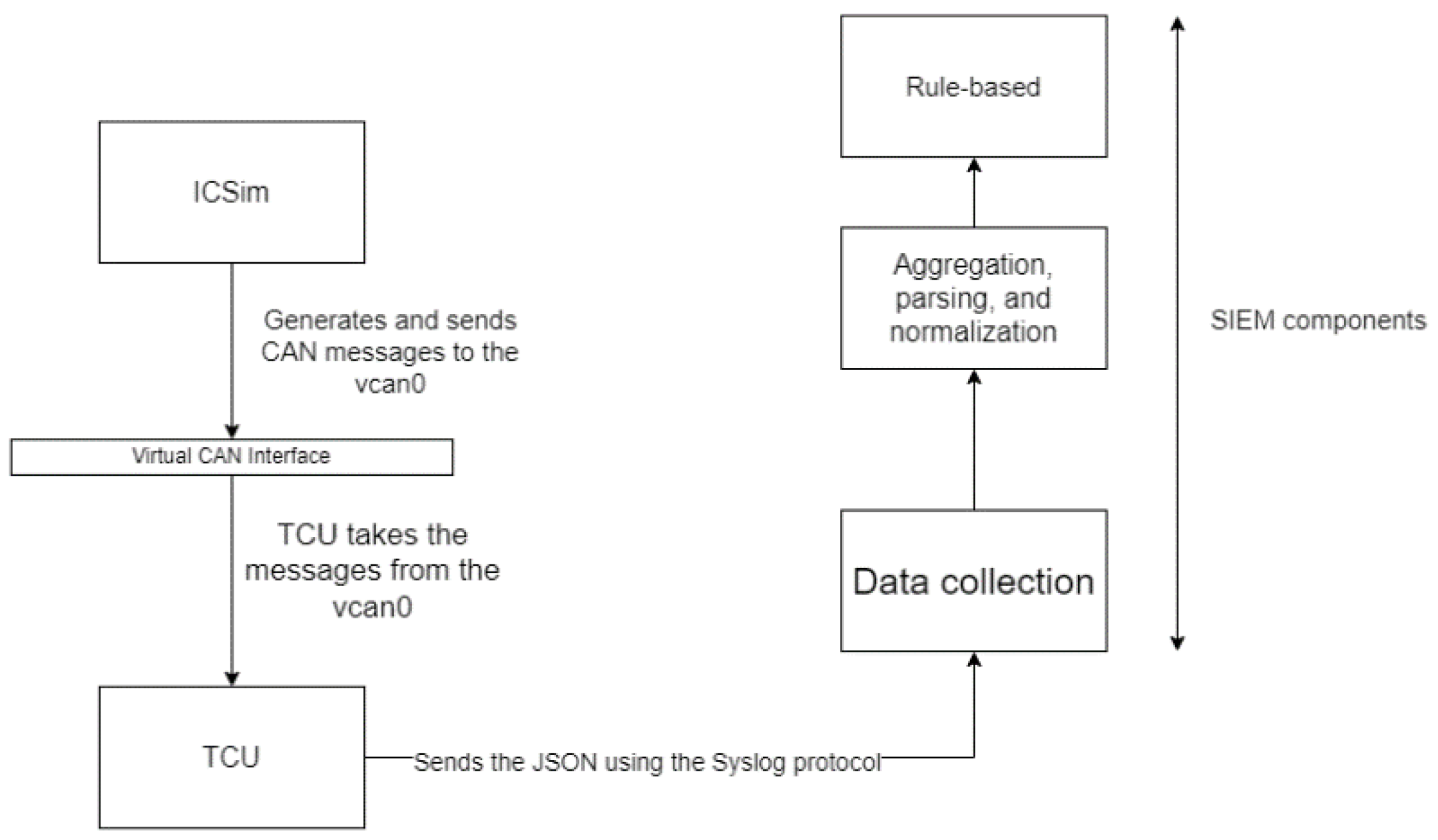
- SIEM collects the raw events that will be aggregated, parsed, normalized, and analyzed to be displayed correctly. It can analyze data from different types of vehicles. Owing to this component, we can parse these data without adding further physical components to the car. After the events are parsed and normalized, the rule-based component allows control over whether the events sent to SIEM correspond to attacks through custom rules. For example, in the information technology (IT) field, rules could detect if we have multiple logins failed attempts on a login page and excessive firewall denies.
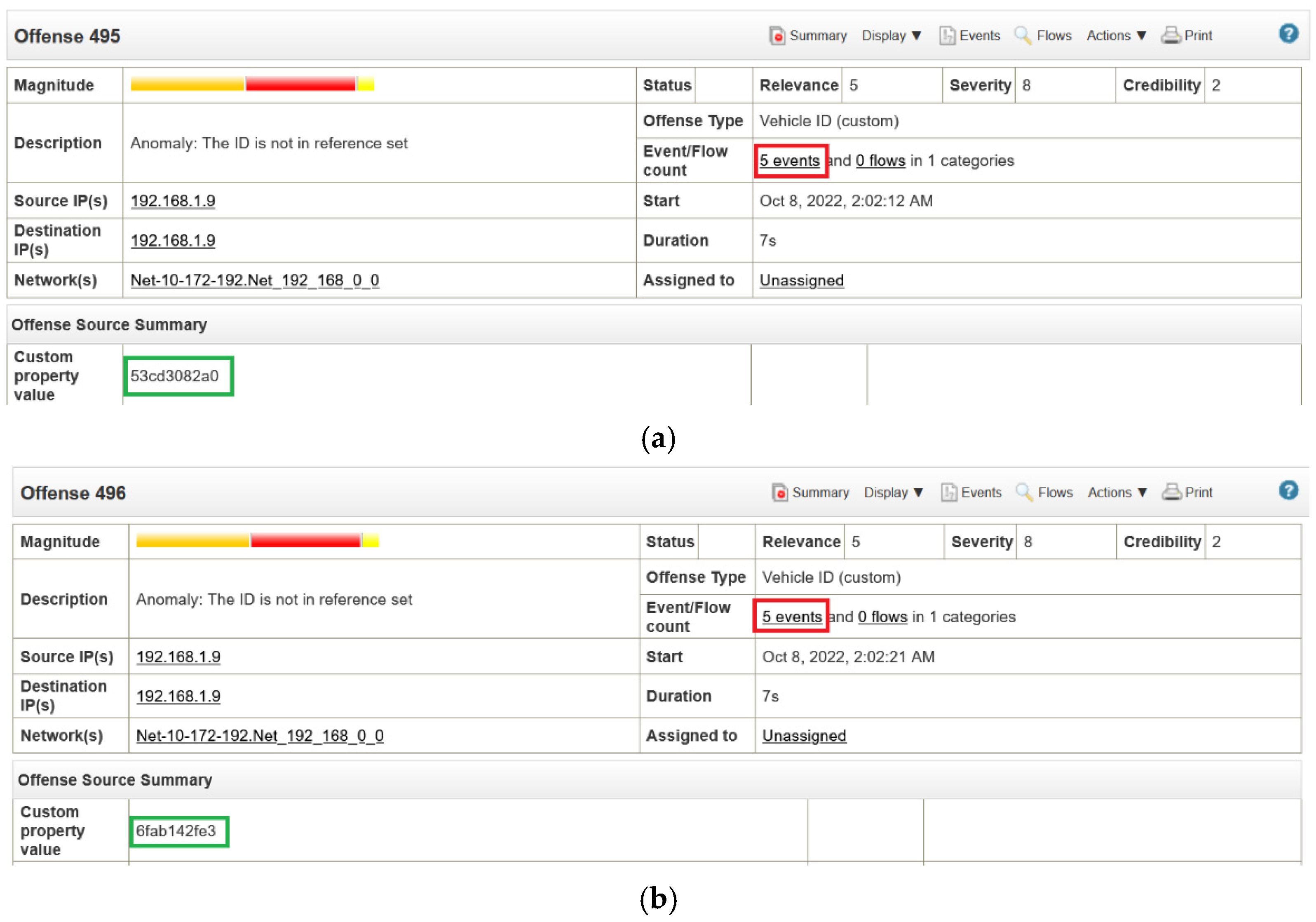
- SOC Console: the parsed events will be shown on the SOC console component and monitored by a cybersecurity specialist. If a rule-based mechanism triggers an offense, it will appear on this component so that the analyst can analyze it and potentially move on to the response phase. An advantage of the SOC console is that if an attack is detected, the cybersecurity specialist can check if it is a false positive or a real attack. Furthermore, the SOC analyst (a person in the organization who has knowledge of the automotive domain and automotive attack), when monitoring the data flow from the vehicle, could identify anomalies or attacks that the SIEM has not identified and subsequently add or modify a rule. In the next subsection, we will show an example of an event displayed on the SOC console.
4.1. IBM QRadar SIEM
- Good position, “Leader”, in Gartner Magic Quadrant 2022 [38] in comparison to other SIEMs.
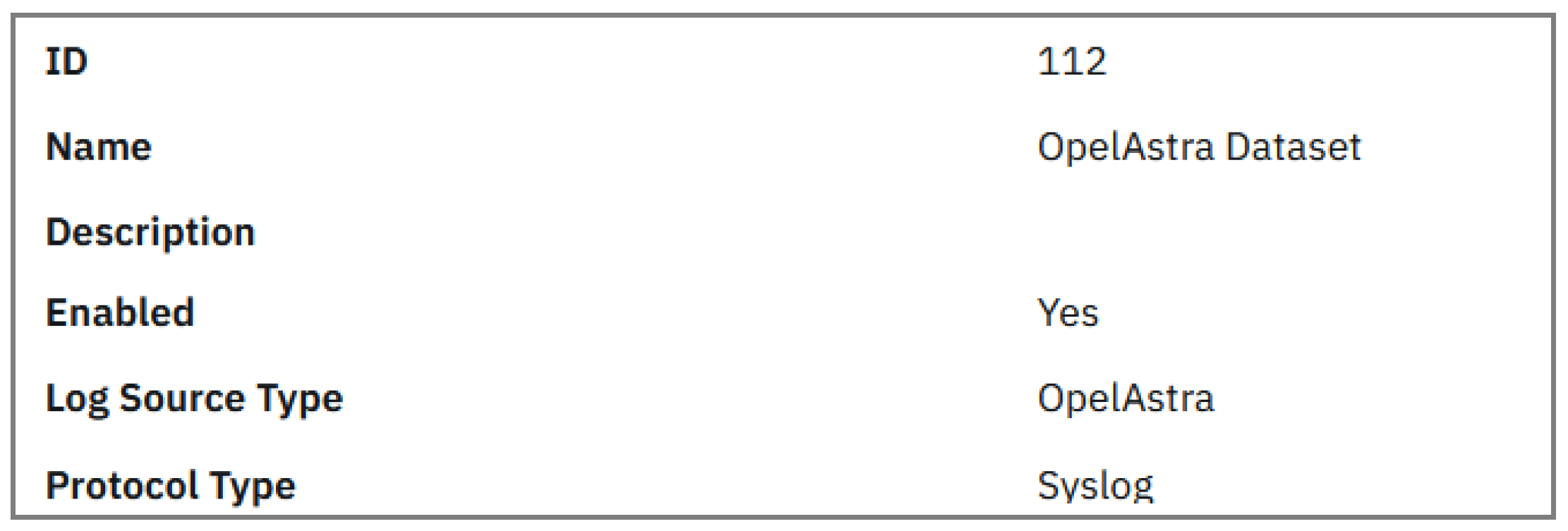
- Possibility to create a custom Log Source different from the IT context. IBM QRadar, using the Syslog protocol, allows information to be received from systems that are different from each other, for example, a vehicle and a computer.
- Possibility to use a set of default rules to be customized for the automotive environment.
- Risk priority modelling that determines the priority level of each offense based on local and enriched threat context, tactics and techniques observed and learned offense disposition patterns within the automotive environment.
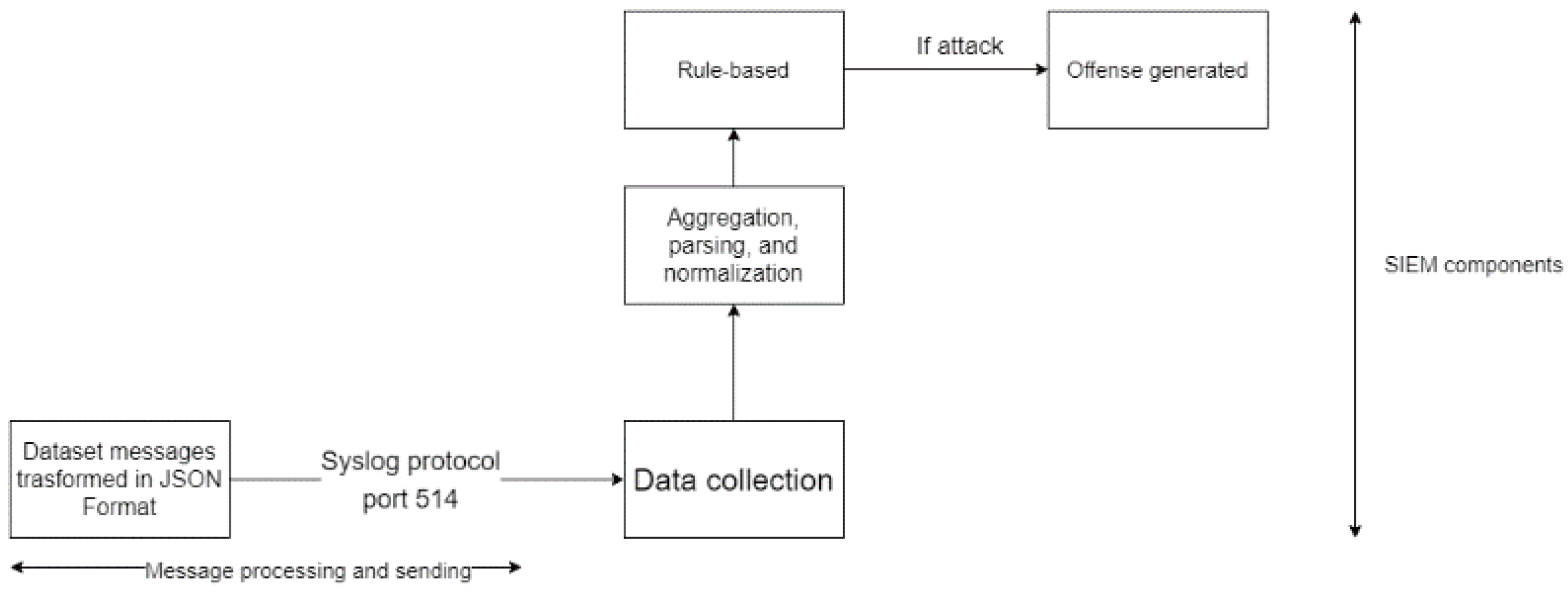
- Data Collection: Collects data such as events or flows from a specific asset. IBM QRadar SIEM accepts data from IDS/IPS, firewall, Syslog, and other sources. The data are parsed and normalized before they are passed to the processing layer. Raw data are parsed and then normalized to present them in a structured and usable format. In Figure 1, this task is carried out by the “Data Collection”, “Event aggregation parsing & normalization”, and “Rule-based Analysis” modules.
- Data processing: In this layer, the data are run through the custom rule engine (CRE), which generates offenses and alerts, and then are written to the storage. In Figure 1 this task is carried out by the “rule-based” module.
- Data searches: Data collected and processed by QRadar are available to users for searches, analysis, reporting, and alerts or offense investigations. In Figure 1, this task is carried out in the SOC console.
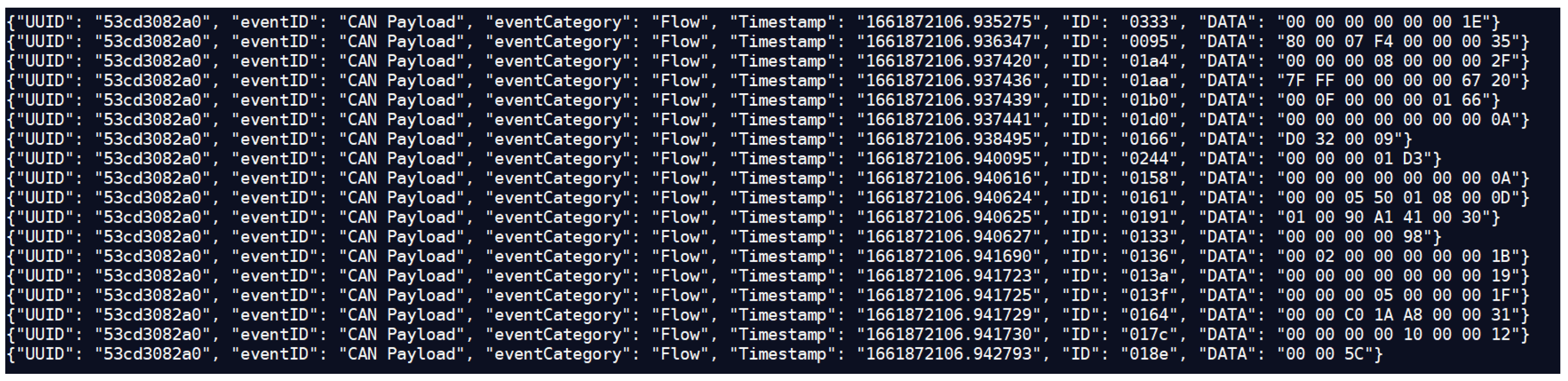
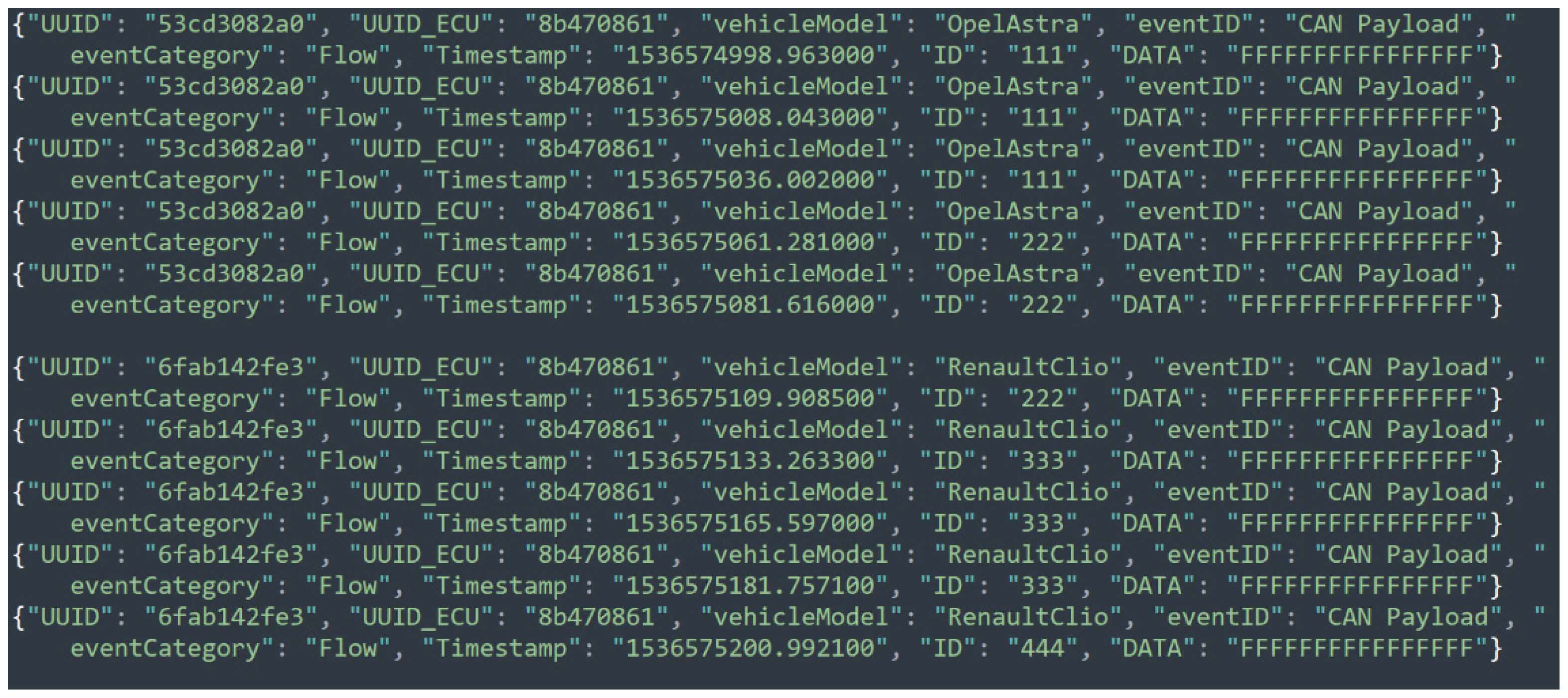
- Vehicle ID: unique identifier of the vehicle (expressed in the payload with a Universally Unique Identifier (UUID). It can be used in the response phase when an attack is detected.
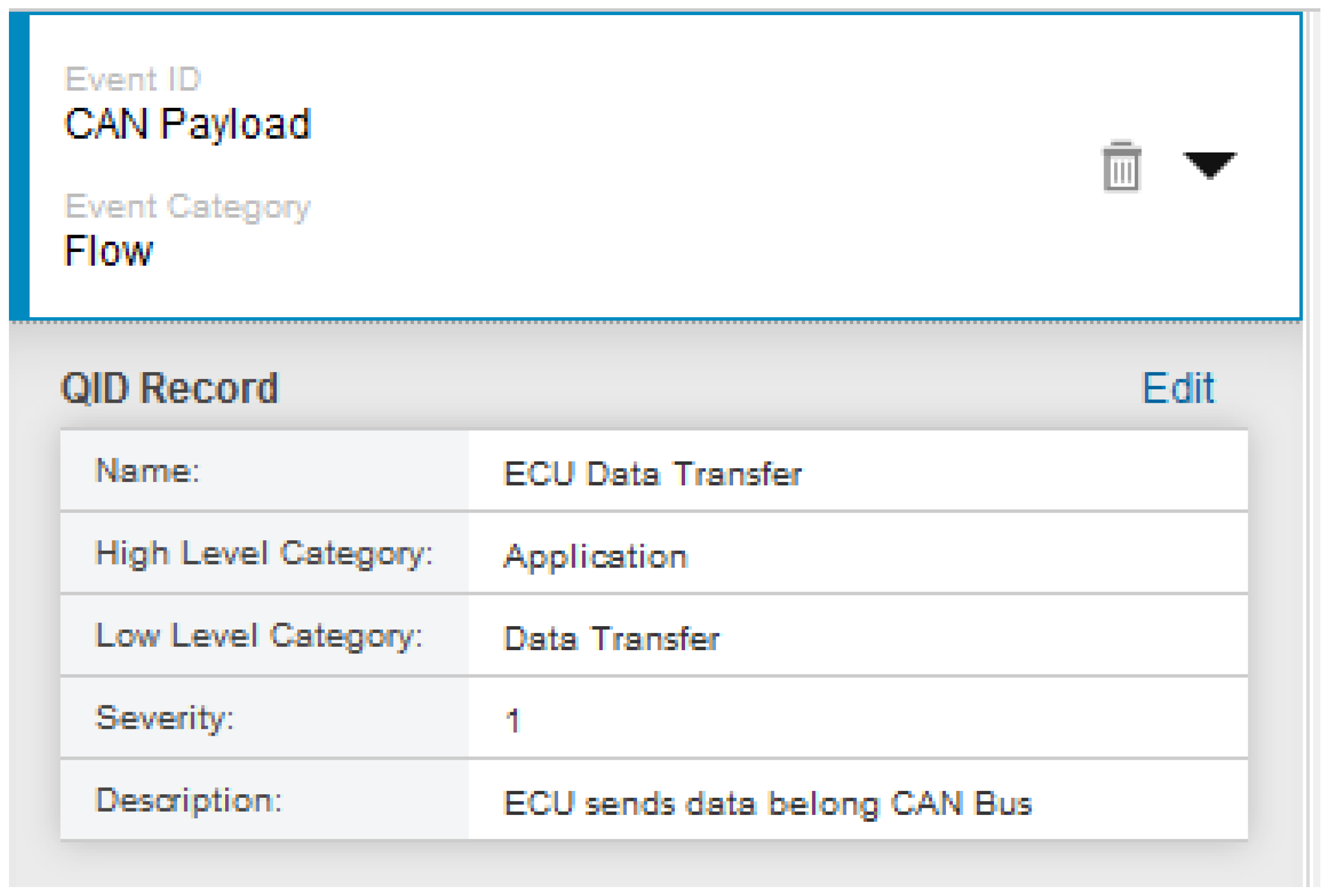
- Event ID and Event Category: are used to map an event with Qradar Identifier (QID). QID is a numeric representation of a specific event and includes name, description, severity, and low-level category. Figure 4 shows the QID, ECU data transfer created with these properties.
- Log Source Time: when the payload arrived at Qradar.
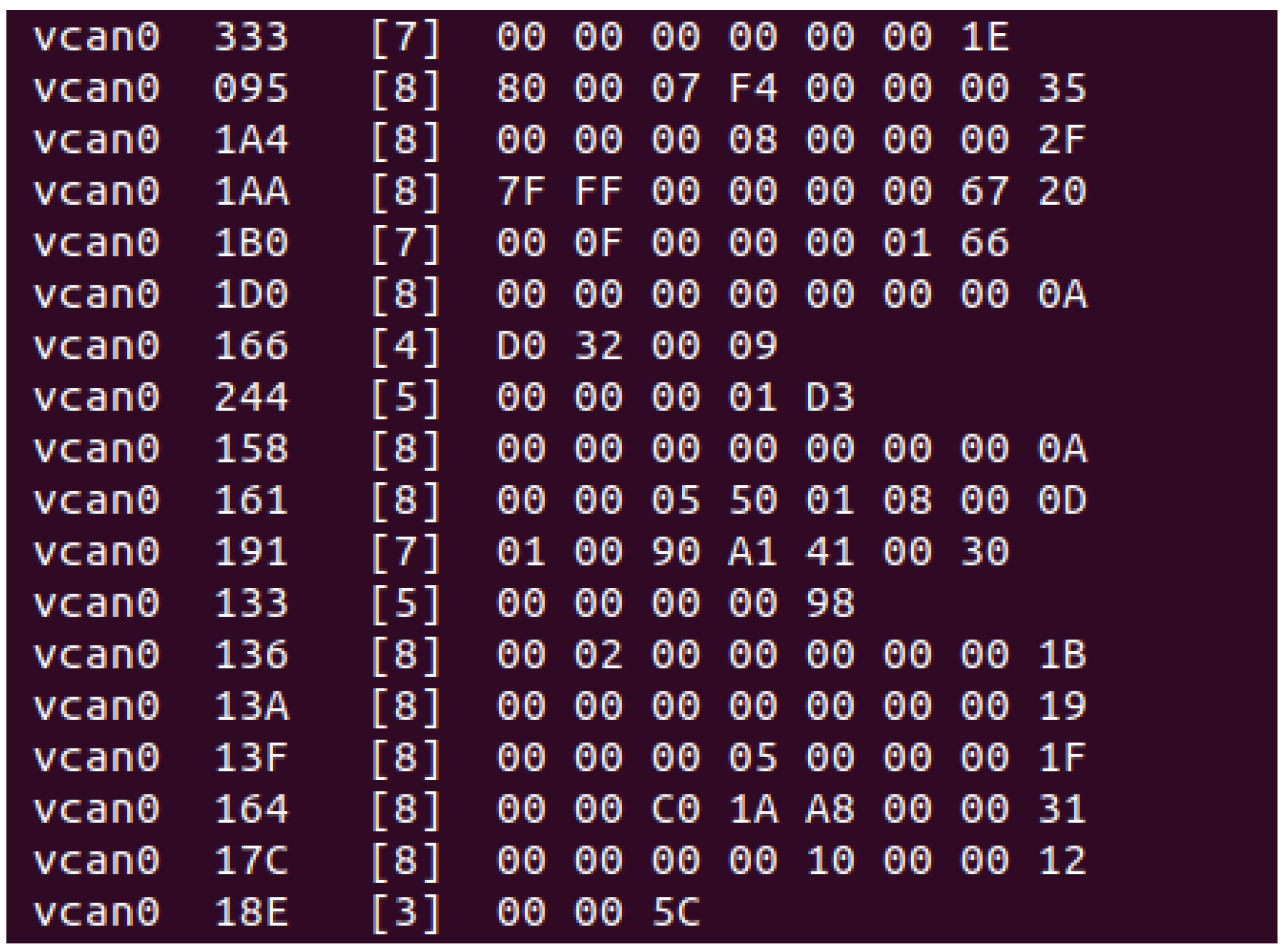
- ID: CAN ID sent on the bus.
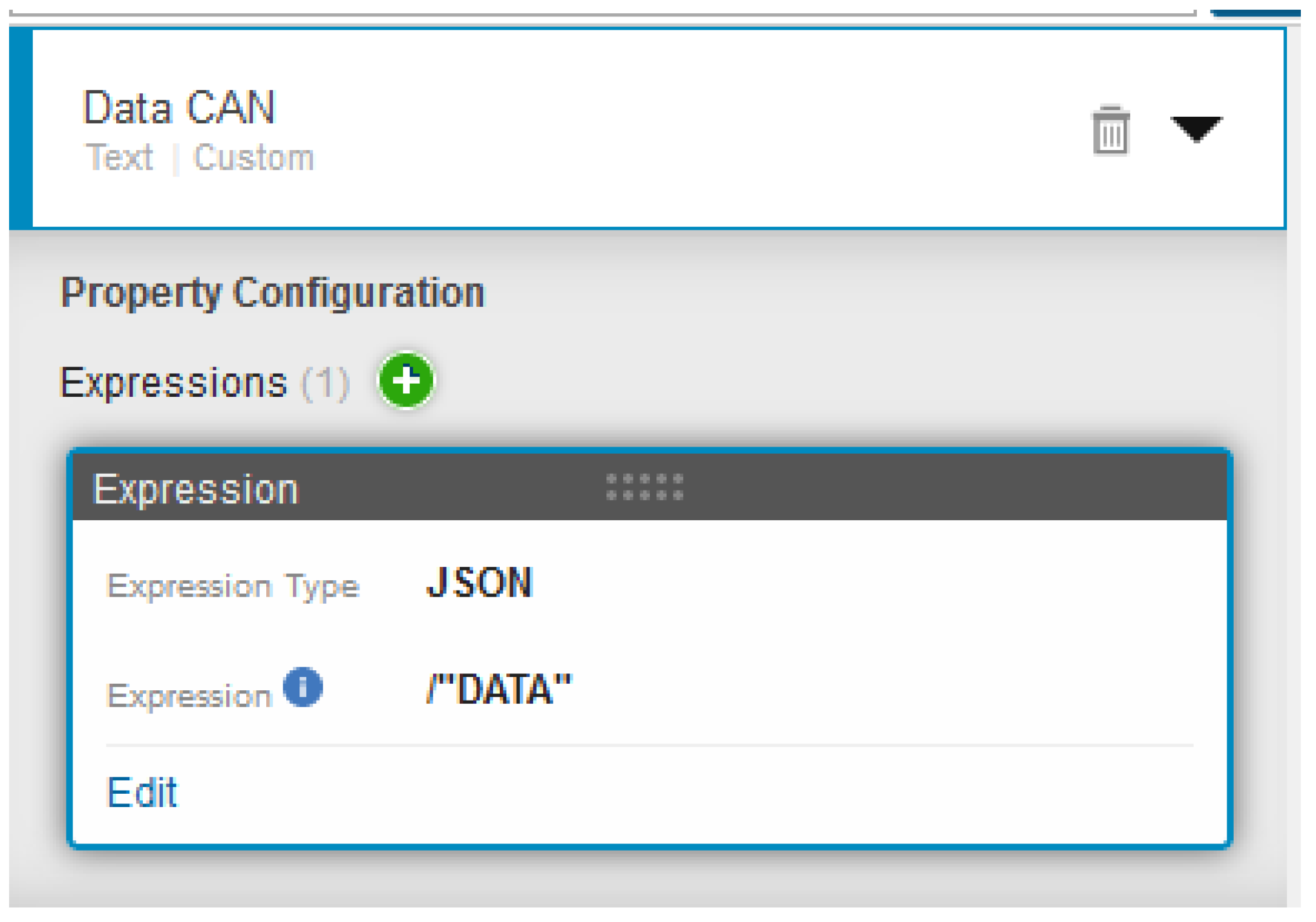
- DATA: data value in hexadecimal.
4.2. Communication between Vehicle and SIEM
5. Experimental Results and Discussion
- UUID_ECU: A unique identifier for each ECU. It can be used to check which ECU is under attack. For this experiment, two unique identifiers will be used: one for the DoS attack and another for the Fuzzing.
- vehicleModel: To represent the vehicle model. Two different models were used to simulate two different vehicles: OpelAstra and RenaultClio.
5.1. Dataset
5.2. DoS Attack
5.3. Fuzzing Attack
- The first five messages are used for the OpelAstra vehicle. The last five for the RenaultClio vehicle. The UUID related to the OpelAstra will not be changed, while a new one is generated for the RenaultClio.
- The UUID_ECU is the same for both vehicles. In this way, it is possible to simulate two vehicles that mount the same ECU and are attacked at the same time.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dibaei, M.; Zheng, X.; Jiang, K.; Abbas, R.; Liu, S.; Zhang, Y.; Xiang, Y.; Yu, S. Attacks and Defences on Intelligent Connected Vehicles: A Survey. Digit. Commun. Netw. 2020, 6, 399–421. [Google Scholar] [CrossRef]
- Bozdal, M.; Samie, M.; Jennions, I. A Survey on Can Bus Protocol: Attacks, Challenges, and Potential Solutions. In Proceedings of the 2018 International Conference on Computing, Electronics & Communications Engineering (iCCECE), Southend, UK, 16–17 August 2018; IEEE: New York, NY, USA, 2018; pp. 201–205. [Google Scholar]
- Miller, C.; Valasek, C. A Survey of Remote Automotive Attack Surfaces. Black Hat USA 2014, 2014, 94. [Google Scholar]
- Palanca, A.; Evenchick, E.; Maggi, F.; Zanero, S. A Stealth, Selective, Link-Layer Denial-of-Service Attack against Automotive Networks. In Proceedings of the International Conference on Detection of Intrusions and Malware, and Vulnerability Assessment, Bonn, Germany, 6–7 July 2017; Springer: Cham, Switzerland, 2017; pp. 185–206. [Google Scholar]
- Tencent Security Keen Lab Experimental Security Assessment of Mercedes-Benz Cars, Mercedes-Benz MBUX Security Research Report. Available online: https://keenlab.tencent.com/en/whitepapers/Mercedes_Benz_Security_Research_Report_Final.pdf (accessed on 7 February 2023).
- Martínez-Cruz, A.; Ramírez-Gutiérrez, K.A.; Feregrino-Uribe, C.; Morales-Reyes, A. Security on In-Vehicle Communication Protocols: Issues, Challenges, and Future Research Directions. Comput. Commun. 2021, 180, 1–20. [Google Scholar] [CrossRef]
- Doan, T.P.; Ganesan, S. CAN Crypto FPGA Chip to Secure Data Transmitted through CAN FD Bus Using AES-128 and SHA-1 Algorithms with a Symmetric Key; SAE Technical Paper 2017-01-1612, WCX™ 17: SAE World Congress Experience. 2017. Available online: https://www.sae.org/publications/technical-papers/content/2017-01-1612/ (accessed on 7 February 2023).
- Siddiqui, A.S.; Gui, Y.; Plusquellic, J.; Saqib, F. Secure Communication over CANBus. In Proceedings of the 2017 IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; IEEE: New York, NY, USA, 2017; pp. 1264–1267. [Google Scholar]
- Stabili, D.; Ferretti, L.; Marchetti, M. Analyses of Secure Automotive Communication Protocols and Their Impact on Vehicles Life-Cycle. In Proceedings of the 2018 IEEE International Conference on Smart Computing (SMARTCOMP), Taormina, Italy, 18–20 June 2018; pp. 452–457. [Google Scholar]
- Cheng, K.; Bai, Y.; Zhou, Y.; Tang, Y.; Sanan, D.; Liu, Y. CANeleon: Protecting CAN Bus with Frame ID Chameleon. IEEE Trans. Veh. Technol. 2020, 69, 7116–7130. [Google Scholar] [CrossRef]
- Kornaros, G.; Bakoyiannis, D.; Tomoutzoglou, O.; Coppola, M.; Gherardi, G. TrustNet: Ensuring Normal-World and Trusted-World CAN-Bus Networking. In Proceedings of the 2019 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), Beijing, China, 21–23 October 2019; pp. 1–6. [Google Scholar]
- Wu, W.; Li, R.; Xie, G.; An, J.; Bai, Y.; Zhou, J.; Li, K. A Survey of Intrusion Detection for In-Vehicle Networks. IEEE Trans. Intell. Transp. Syst. 2019, 21, 919–933. [Google Scholar] [CrossRef]
- Sommer, F.; Dürrwang, J.; Kriesten, R. Survey and Classification of Automotive Security Attacks. Information 2019, 10, 148. [Google Scholar] [CrossRef]
- Baldassarre, M.T.; Barletta, V.S.; Caivano, D.; Raguseo, D.; Scalera, M. Teaching Cyber Security: The HACK-SPACE Integrated Model. In Proceedings of the ITASEC, Pisa, Italy, 13–15 February 2019. [Google Scholar]
- Costantino, G.; Matteucci, I.; Morales, D. EARNEST: A Challenge-Based Intrusion Prevention System for CAN Messages. In Proceedings of the 2020 IEEE International Symposium on Software Reliability Engineering Workshops (ISSREW), Coimbra, Portugal, 12–15 October 2020; IEEE: New York, NY, USA, 2020; pp. 243–248. [Google Scholar]
- Asokan, N.; Nyman, T.; Rattanavipanon, N.; Sadeghi, A.-R.; Tsudik, G. ASSURED: Architecture for Secure Software Update of Realistic Embedded Devices. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2018, 37, 2290–2300. [Google Scholar] [CrossRef]
- Mbakoyiannis, D.; Tomoutzoglou, O.; Kornaros, G. Secure Over-the-Air Firmware Updating for Automotive Electronic Control Units. In Proceedings of the 34th ACM/SIGAPP Symposium on Applied Computing, Limassol, Cyprus, 8–12 April 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 174–181. [Google Scholar]
- Catalano, C.; Paiano, L.; Calabrese, F.; Cataldo, M.; Mancarella, L.; Tommasi, F. Anomaly Detection in Smart Agriculture Systems. Comput. Ind. 2022, 143, 103750. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, S.H.; Kim, H.K. OTIDS: A Novel Intrusion Detection System for In-Vehicle Network by Using Remote Frame. In Proceedings of the 2017 15th Annual Conference on Privacy, Security and Trust (PST), Calgary, AB, Canada, 28–30 August 2017; IEEE: New York, NY, USA, 2017; pp. 57–5709. [Google Scholar]
- El-Rewini, Z.; Sadatsharan, K.; Selvaraj, D.F.; Plathottam, S.J.; Ranganathan, P. Cybersecurity Challenges in Vehicular Communications. Veh. Commun. 2020, 23, 100214. [Google Scholar] [CrossRef]
- Scarfone, K.; Mell, P. Guide to Intrusion Detection and Prevention Systems (IDPS); Special Publication 800-94; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2007. [Google Scholar]
- Barletta, V.S.; Caivano, D.; Nannavecchia, A.; Scalera, M. A Kohonen SOM Architecture for Intrusion Detection on In-Vehicle Communication Networks. Appl. Sci. 2020, 10, 5062. [Google Scholar] [CrossRef]
- Seo, E.; Song, H.M.; Kim, H.K. GIDS: GAN Based Intrusion Detection System for In-Vehicle Network. In Proceedings of the 2018 16th Annual Conference on Privacy, Security and Trust (PST), Belfast, Ireland, 28–30 August 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]
- Cho, K.-T.; Shin, K.G. Fingerprinting Electronic Control Units for Vehicle Intrusion Detection. In Proceedings of the 25th USENIX Security Symposium (USENIX Security 16), Austin, TX, USA, 10–12 August 2016; pp. 911–927. [Google Scholar]
- Lokman, S.-F.; Othman, A.T.; Abu-Bakar, M.-H. Intrusion Detection System for Automotive Controller Area Network (CAN) Bus System: A Review. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 184. [Google Scholar] [CrossRef] [Green Version]
- Young, C.; Zambreno, J.; Olufowobi, H.; Bloom, G. Survey of Automotive Controller Area Network Intrusion Detection Systems. IEEE Des. Test 2019, 36, 48–55. [Google Scholar] [CrossRef]
- Fallstrand, D.; Lindström, V. Applicability Analysis of Intrusion Detection and Prevention in Automotive Systems. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2015. [Google Scholar]
- Falk, E.; Repcek, S.; Fiz, B.; Hommes, S.; State, R.; Sasnauskas, R. VSOC-a Virtual Security Operating Center. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Aijaz, L.; Aslam, B.; Khalid, U. Security Operations Center—A Need for an Academic Environment. In Proceedings of the 2015 World Symposium on Computer Networks and Information Security (WSCNIS), Hammamet, Tunisia, 19–20 September 2015; IEEE: New York, NY, USA, 2015; pp. 1–7. [Google Scholar]
- Madani, A.; Rezayi, S.; Gharaee, H. Log Management Comprehensive Architecture in Security Operation Center (SOC). In Proceedings of the 2011 International Conference on Computational Aspects of Social Networks (CASoN), Salamanca, Spain, 19–20 October 2011; IEEE: New York, NY, USA, 2011; pp. 284–289. [Google Scholar]
- Bidou, R. Security Operation Center Concepts & Implementation. 2005. Available online: https://www.researchgate.net/publication/228587242_Security_Operation_Center_Concepts_Implementation (accessed on 7 February 2023).
- Shahjee, D.; Ware, N. Designing a Framework of an Integrated Network and Security Operation Center: A Convergence Approach. In Proceedings of the 2022 IEEE 7th International conference for Convergence in Technology (I2CT), Mumbai, India, 7–9 April 2022; IEEE: New York, NY, USA, 2022; pp. 1–4. [Google Scholar]
- Langer, F.; Schüppel, F.; Stahlbock, L. Establishing an Automotive Cyber Defense Center. In Proceedings of the 17th Escar Europe: Embedded Security in Cars, Stuttgart, Germany, 19–20 November 2019. [Google Scholar]
- Meyer, P.; Hackel, T.; Langer, F.; Stahlbock, L.; Decker, J.; Eckhardt, S.A.; Korf, F.; Schmidt, T.C.; Schüppel, F. A Security Infrastructure for Vehicular Information Using Sdn, Intrusion Detection, and a Defense Center in the Cloud. In Proceedings of the 2020 IEEE Vehicular Networking Conference (VNC), New York, NY, USA, 16–18 December 2020; IEEE: New York, NY, USA, 2020; pp. 1–2. [Google Scholar]
- Tommasi, F.; Catalano, C.; Taurino, I. Browser-in-the-Middle (BitM) Attack. Int. J. Inf. Secur. 2022, 21, 179–189. [Google Scholar] [CrossRef]
- Stabili, D.; Ferretti, L.; Andreolini, M.; Marchetti, M. DAGA: Detecting Attacks to In-Vehicle Networks via N-Gram Analysis. IEEE Trans. Veh. Technol. 2022, 71, 11540–11554. [Google Scholar] [CrossRef]
- IBM. IBM QRadar Security Intelligence. Available online: https://www.ibm.com/products/qradar-siem (accessed on 7 February 2023).
- Magic Quadrant for Security Information and Event Management. Available online: https://www.gartner.com/doc/reprints?id=1-2BDC4CEU&ct=221010&st=sb (accessed on 7 February 2023).
- IBM Architecture and Deployment Guide. Available online: https://www.ibm.com/docs/en/SS42VS_7.4/pdf/b_siem_deployment.pdf (accessed on 7 February 2023).
- Gerhards, R. The Syslog Protocol. Available online: https://www.rfc-editor.org/rfc/rfc5424 (accessed on 9 February 2023).
- Dupont, G.; Lekidis, A.; Den Hartog, J.; Etalle, S. Automotive Controller Area Network (CAN) Bus Intrusion Dataset V2; 4TU.Centre for Research Data: Delft, The Netherlands, 2019. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CAN ID | Data Field |
|---|---|
| 111 | FFFFFFFFFFFFFFFF |
| 111 | FFFFFFFFFFFFFFFF |
| 111 | FFFFFFFFFFFFFFFF |
| 222 | FFFFFFFFFFFFFFFF |
| 222 | FFFFFFFFFFFFFFFF |
| 222 | FFFFFFFFFFFFFFFF |
| 333 | FFFFFFFFFFFFFFFF |
| 333 | FFFFFFFFFFFFFFFF |
| 333 | FFFFFFFFFFFFFFFF |
| 444 | FFFFFFFFFFFFFFFF |
| Attack | Accuracy (%) | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|---|
| DoS | 100 | 100 | 100 | 100 |
| Fuzzing | 100 | 100 | 100 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barletta, V.S.; Caivano, D.; Vincentiis, M.D.; Ragone, A.; Scalera, M.; Martín, M.Á.S. V-SOC4AS: A Vehicle-SOC for Improving Automotive Security. Algorithms 2023, 16, 112. https://doi.org/10.3390/a16020112
Barletta VS, Caivano D, Vincentiis MD, Ragone A, Scalera M, Martín MÁS. V-SOC4AS: A Vehicle-SOC for Improving Automotive Security. Algorithms. 2023; 16(2):112. https://doi.org/10.3390/a16020112
Chicago/Turabian StyleBarletta, Vita Santa, Danilo Caivano, Mirko De Vincentiis, Azzurra Ragone, Michele Scalera, and Manuel Ángel Serrano Martín. 2023. "V-SOC4AS: A Vehicle-SOC for Improving Automotive Security" Algorithms 16, no. 2: 112. https://doi.org/10.3390/a16020112
APA StyleBarletta, V. S., Caivano, D., Vincentiis, M. D., Ragone, A., Scalera, M., & Martín, M. Á. S. (2023). V-SOC4AS: A Vehicle-SOC for Improving Automotive Security. Algorithms, 16(2), 112. https://doi.org/10.3390/a16020112