Comparison of Horizontal Accuracy, Shape Similarity and Cost of Three Different Road Mapping Techniques


Abstract
:1. Introduction
2. Materials and Methods
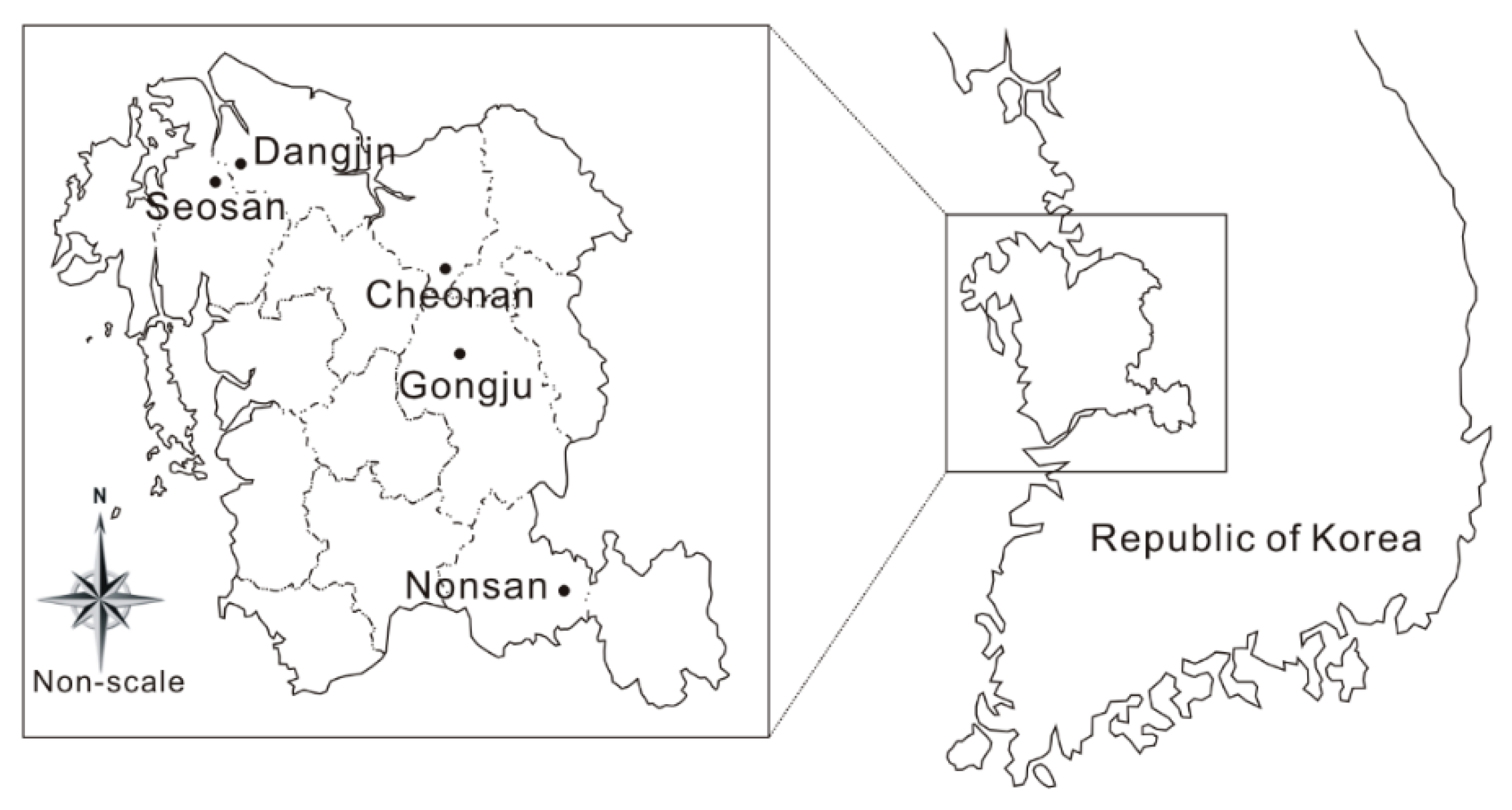
2.1. Study Area Description
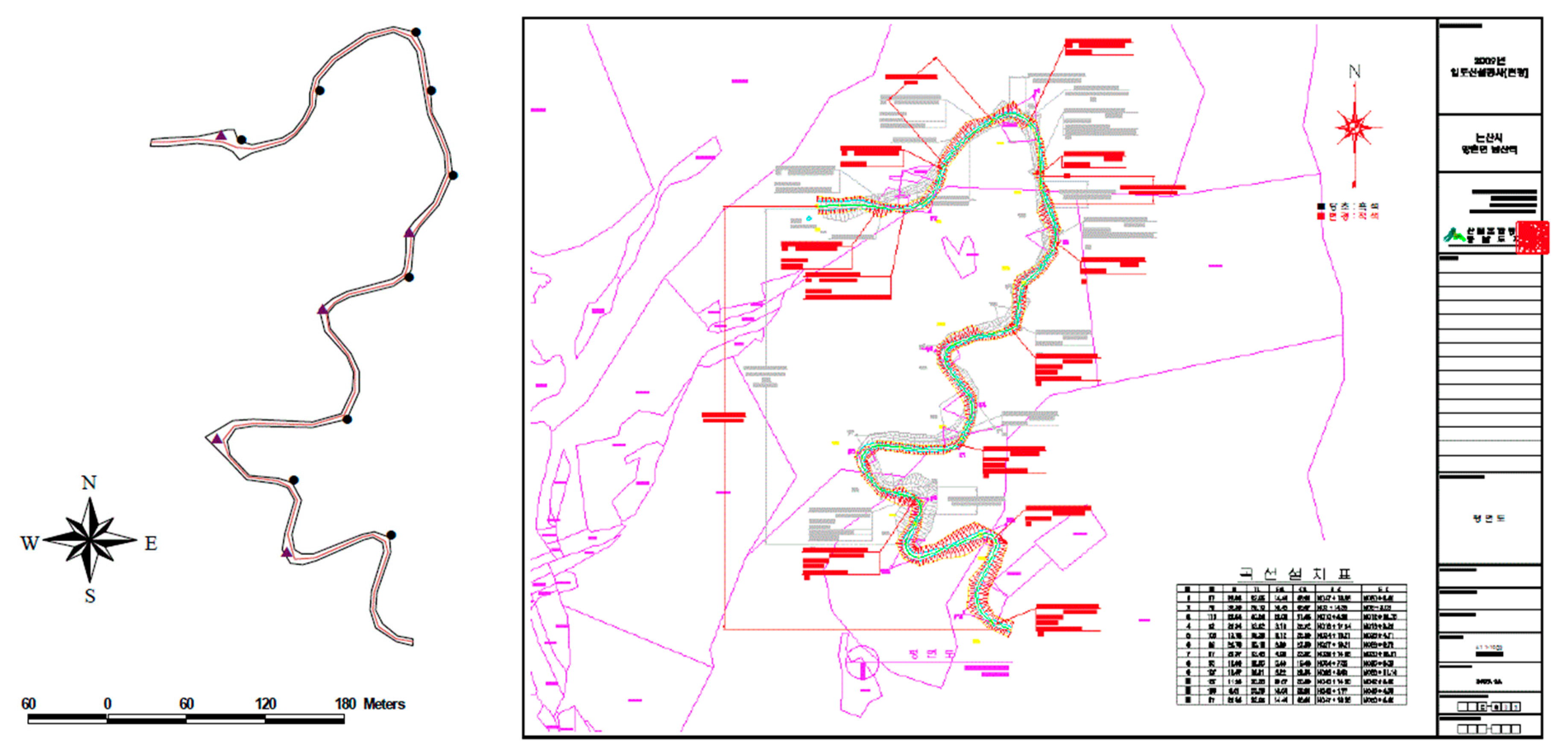
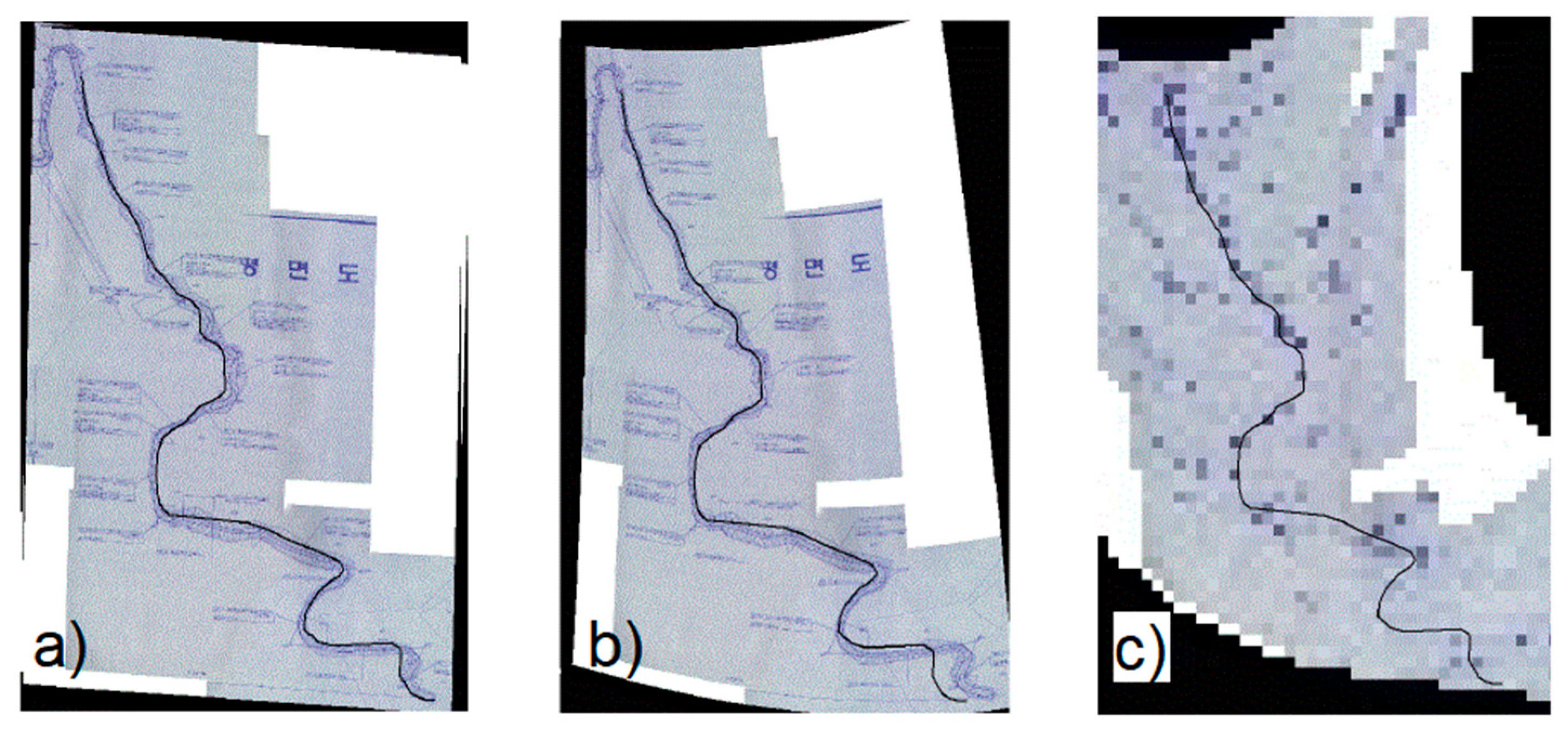
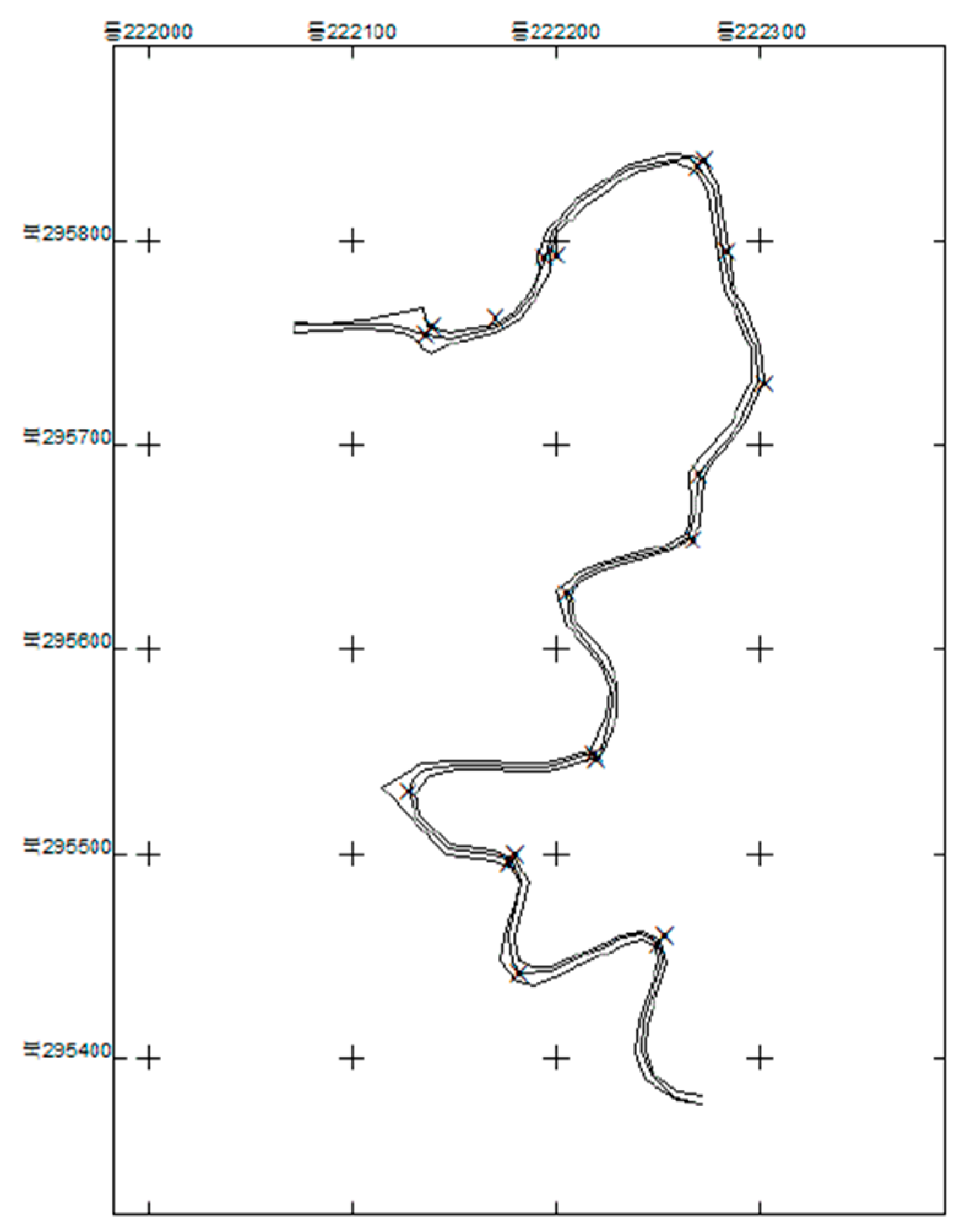
2.2. Mapping Techniques of Forest Roads
2.3. Comparison of the Horizontal Accuracy and Shape Similarity between Three Mapping Techniques
2.3.1. Point-Correspondence
- rmsex is root mean square error of x-axis,
- rmsey is root mean square error of y-axis.
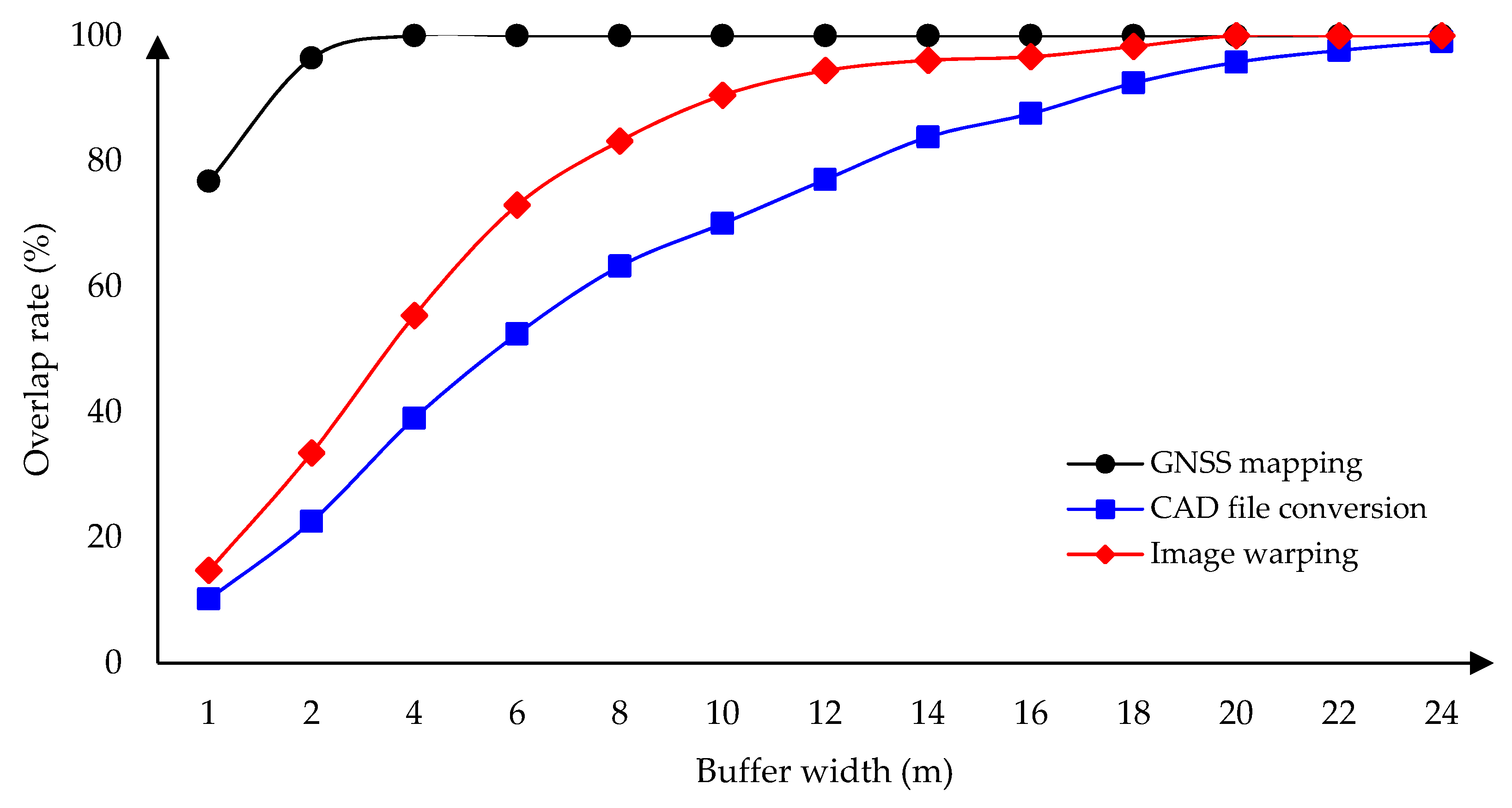
2.3.2. Buffering Analysis
2.3.3. Shape Index
- : shape index,
- p: perimeter (m),
- A: Area (m2).
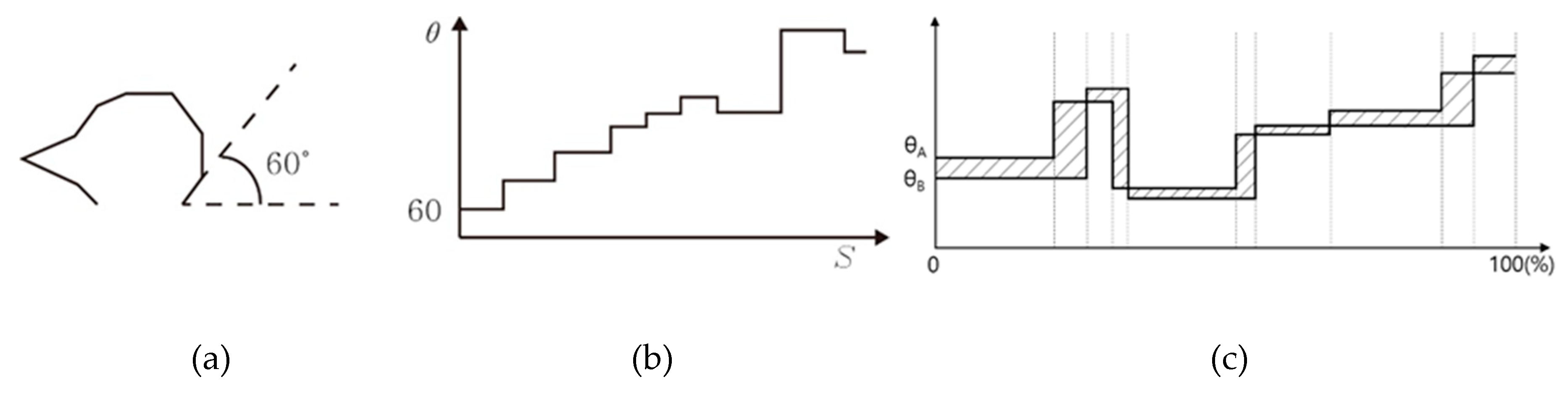
2.3.4. Turning Function Analysis
2.3.5. Estimation of Map-Making Time and Cost
3. Results
3.1. Point-correspondence
3.2. Buffering Analysis
3.3. Shape Index
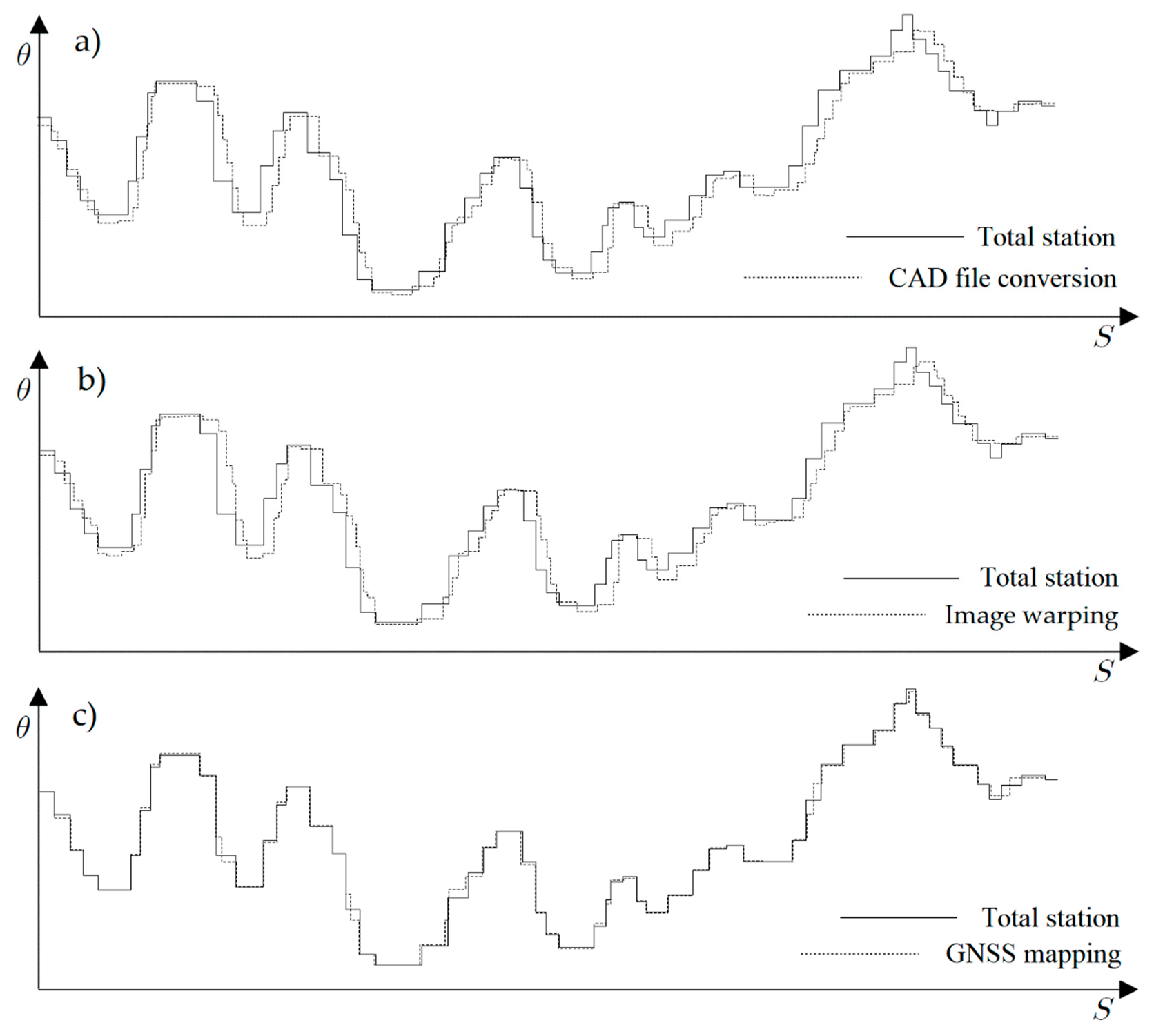
3.4. Turning Function Analysis
3.5. Estimation of Map-Making Time and Cost
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abdi, E.; Sisakht, L.; Goushbor, L.; Soufi, H. Accuracy assessment of GPS and surveying technique in forest road mapping. Ann. For. Res. 2012, 55, 309–317. [Google Scholar]
- Talebi, M.; Majnounian, B.; Ehsan, A.; Tehrani, F.B. Development a GIS database for forest road management in Arasbaran forest, Iran. For. Sci. Technol. 2015, 11, 27–35. [Google Scholar] [CrossRef]
- Murphy, P.N.C.; Ogilvie, J.; Castonguay, M.; Zhang, C.F.; Meng, F.R.; Arp, P.A. Improving forest operations planning through high-resolution flow-channel and wet-areas mapping. For. Chron. 2008, 84, 568–574. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Choi, J.; Yu, K. Development of the Digital Map Updating System using CAD Object Extracted from As-Built Drawings. J. Korean Soc. GIS 2009, 17, 13–21, (In Korean with English Abstract). [Google Scholar]
- Alizadeh, S.; Majnounian, B.; Darvishsefat, A. Possibility of designing and evaluation of forest road network variants using GIS and field investigation. J. For. Wood Prod. 2011, 63, 399–408. [Google Scholar]
- Grigolato, S.; Mologni, O.; Raffaele, C. GIS applications in forest operations and road network planning: An overview over the last two decades. Croat. J. For. Eng. 2017, 38, 175–186. [Google Scholar]
- Ömer, M.; Ayhan, C. Accuracy and cost comparison of spatial data acquisition methods for the development of geographical information systems. J. Geogr. Regional Plan. 2009, 2, 235–242. [Google Scholar] [CrossRef]
- White, R.A.; Dietterick, B.C.; Mastin, T.; Strohman, R. Forest roads mapped using LiDAR in steep forested terrain. Remote Sens. 2010, 2, 1120–1141. [Google Scholar] [CrossRef]
- Kim, T.; Yoon, J.; Woo, C.; Lee, K.; Hong, C. Comparison of methodology and accuracy of digital mapping of forest roads. J. Geogr. Inform. Syst. Assoc. Korea 2005, 13, 195–209. (In Korean) [Google Scholar]
- Glasbey, C.; Mardia, K. A review of image warping methods. J. Appl. Stat. 1998, 25, 155–171. [Google Scholar] [CrossRef]
- Kim, M.; Kweon, H.; Choi, Y.; Yeom, I.; Lee, J. Evaluation of horizontal position accuracy in forest road completion drawing. Korean J. Agr. Sci. 2010, 37, 471–479, (In Korean with English Abstract). [Google Scholar]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62–78. [Google Scholar] [CrossRef]
- Kagawa, Y.; Sekimoto, Y.; Shibasaki, R. Comparative study of positional accuracy evaluation of line data. In Proceedings of the 20th Asian Conference on Remote Sensing, Hong Kong, China, 22–25 November 1999. [Google Scholar]
- Goodchild, M.; Hunter, G. A simple positional accuracy measure for linear features. Int. J. Geogr. Inform. Sci. 1997, 11, 299–306. [Google Scholar] [CrossRef]
- Tveite, H.; Langaas, S. An accuracy assessment method for geographical line data sets based on buffering. Int. J. Geogr. Inform. Sci. 1999, 13, 27–47. [Google Scholar] [CrossRef]
- Lueng, Y.; Yan, J. A locational error model for spatial features. Int. J. Geogr. Inform. Sci. 1998, 12, 607–620. [Google Scholar] [CrossRef]
- Arkin, E.; Chew, P.; Huttenlocher, D.; Kedem, K.; Mitchel, J. An efficiently computable metric for comparing polygonal shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 209–215. [Google Scholar] [CrossRef]
- Velkamp, R.C. Shape matching: similarity measures and algorithms. In Proceedings of the International Conference on Shape Modeling and Applications, Genova, Italy, 7–11 May 2001. [Google Scholar]
- SOKKIA KOREA. Available online: https://www.sokkia.co.kr (accessed on 15 August 2010).
- AutoCAD. Available online: https://www.autodesk.com (accessed on 15 April 2012).
- Parkhomenko, A.S. Affine transformation. In Encyclopedia of Mathematics; Hazewinkel, M., Ed.; Springer: Berlin, Germany, 2010; Available online: http://www.encyclopediaofmath.org/index.php?title=Affine_transformation&oldid=17980 (accessed on 9 September 2018).
- ESRI. Available online: http://support.esri.com (accessed on 15 August 2010).
- Trimble Korea. Available online: https://geospatial.trimble.com (accessed on 15 June 2010).
- Van Niel, T.G.; McVicar, T.R. Experimental evaluation of positional accuracy estimates from a linear network using point-and line-based testing methods. Int. J. Geogr. Inform. Sci. 2002, 16, 459–473. [Google Scholar] [CrossRef]
- Ramirez, J.R.; Ali, T. Progress in metrics development to measure positional accuracy of spatial data. In Proceedings of the 21st International Cartographic Conference, Durban, South Africa, 10–16 August 2003; pp. 1763–1772. [Google Scholar]
- Forman, R.T.T.; Godron, M. Landscape Ecology; John Wiley and Sons: New York, NY, USA, 1986; pp. 188–189. [Google Scholar]
- Velkamp, R.C.; Hagedoorn, M. Shape similarities, properties, and constructions. In Proceedings of the 4th International Conference, Lyan, France, 2–4 November 2000; pp. 467–476. [Google Scholar]
- Kim, M.; Ahn, D. Landscape ecological analysis of urban parks –analysis of index of patch shape and the dispersion of patches. J. Korean Inst. Landsc. Archit. 1996, 23, 12–19, (In Korean with English Abstract). [Google Scholar]
- Korea Engineering and Consulting Association (KENCA). Available online: https://www.etis.or.kr/webs/statistics/statistics_board.jsp?leftParam=1&topParam=3&boardId=TOTALBBS&categorygroup2=TB050 (accessed on 6 May 2019).
- KEB Hanabank. Available online: https://www.kebhana.com (accessed on 14 January 2019).
- Pirti, A. Accuracy analysis of GPS positioning near the forest environment. Croat. J. For. Eng. 2008, 29, 189–199. [Google Scholar]
- Yosimura, T.; Hasegawa, H. Comparing the precision and accuracy of GPS positioning in forested areas. J. For. Res. 2003, 8, 147–152. [Google Scholar] [CrossRef]
- Shi, W. A generic statistical approach for modelling error of geometric features in GIS. Int. J. Geogr. Inform. Sci. 1998, 12, 131–143. [Google Scholar] [CrossRef]
- Duckham, M.; Drummond, J. Assessment of error in digital vector data using fractal geometry. Int. J. Geogr. Inform. Sci. 2000, 14, 67–84. [Google Scholar] [CrossRef] [Green Version]
- Veregin, H. Quantifying positional error induced by line simplification. Int. J. Geogr. Inform. Sci. 2000, 14, 113–130. [Google Scholar] [CrossRef]
- Azizi, Z.; Najafi, A.; Sadeghian, S. Forest road detection using LiDAR data. J. For. Res. 2014, 25, 975–980. [Google Scholar] [CrossRef]
- Kang, J.M.; Yoon, H.C.; Lee, J.D.; Park, J.K. Analysis of economical efficiency of digital map in production cost by aerial LiDAR surveying. J. KOGSIS 2007, 15, 67–73, (In Korean with English Abstract). [Google Scholar]
- Yang, B. Republic of Korea, Nation Map Book II; Ministry of Land, Infrastructure and Transport, National Geographic Information Institute: Suwon, Gyeonggi-do, Korea, 2016. Available online: http://map.ngii.go.kr/ms/pblictn/nationMapBook.do (accessed on 17 September 2018).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Length (m) 1 | Construction Year | Altitude (m) | Forest Type | |||
|---|---|---|---|---|---|---|---|
| B.P. 2 | E.P. 3 | Max. | Min. | ||||
| Dangjin | 1417 | 2009 | 147 | 190 | 190 | 143 | Hardwood-forest |
| Seosan | 1275 | 2008 | 116 | 98 | 124 | 97 | Softwood-forest |
| Nonsan | 1012 | 2009 | 151 | 154 | 175 | 151 | Mixed forest |
| Choenan | 1020 | 2007 | 174 | 197 | 197 | 167 | Mixed forest |
| Gongju | 1105 | 2009 | 401 | 412 | 447 | 397 | Mixed forest |
| Area | No. of IP 1 (ea) | Total Station (m) | CAD File Conversion (m) | Image Warping (m) | GNSS Mapping (m) |
|---|---|---|---|---|---|
| Dangjin | 11 | 1398 | 1417 (△19) | 1438 (△40) | 1396 (▽2) |
| Seosan | 19 | 1209 | 1275 (△66) | 1280 (△71) | 1211 (△2) |
| Nonsan | 12 | 985 | 1012 (△27) | 1040 (△55) | 986 (△1) |
| Cheonan | 13 | 1048 | 1020 (▽28) | 1123 (△75) | 1047 (▽1) |
| Gongju | 23 | 1022 | 1105 (△83) | 1101 (△79) | 1027 (△5) |
| Total | 78 | 5662 | 5829 (△167) | 5982 (△320) | 5667 (△5) |
| Mapping Technique | Total | Dangjin | Seosan | Nonsan | Cheonan | Gongju | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | SD 1 | Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | |
| CAD file conversion | 13.35 a | 7.36 | 14.78 c | 9.38 | 14.51 c | 6.25 | 11.04 c | 4.52 | 13.07 c | 6.86 | 14.01 c | 7.68 |
| Image warping | 7.13 b | 3.75 | 8.79 b | 3.34 | 8.97 b | 3.66 | 5.63 b | 2.49 | 5.66 b | 3.06 | 6.46 b | 4.16 |
| GNSS mapping | 1.28 c | 0.86 | 1.99 a | 0.63 | 0.81 a | 0.48 | 1.08 a | 0.64 | 1.16 a | 0.82 | 1.36 a | 1.00 |
| F | 79.89 | 11.10 | 24.28 | 22.08 | 17.08 | 14.14 | ||||||
| P | < 0.01 | < 0.01 | < 0.01 | < 0.01 | < 0.01 | < 0.01 | ||||||
| Route Location | Mapping Technique | Area (m2) | Length (m) | Shape Index |
|---|---|---|---|---|
| Dangjin | CAD file conversion | 11,715 | 2839.7 | 7.4 |
| Image warping | 5548 | 2852.8 | 10.8 | |
| GNSS mapping | 1624 | 2800.0 | 19.6 | |
| Seosan | CAD file conversion | 11,884 | 2506.6 | 6.5 |
| Image warping | 6733 | 2503.9 | 8.6 | |
| GNSS mapping | 557 | 2422.0 | 28.9 | |
| Nonsan | CAD file conversion | 6040 | 2019.4 | 7.3 |
| Image warping | 3517 | 2037.1 | 9.7 | |
| GNSS mapping | 554 | 1974.0 | 23.7 | |
| Cheonan | CAD file conversion | 6942 | 2123.8 | 7.2 |
| Image warping | 4582 | 2194.1 | 9.1 | |
| GNSS mapping | 479 | 2099.0 | 27.0 | |
| Gongju | CAD file conversion | 8612 | 2165.4 | 6.6 |
| Image warping | 7169 | 2164.2 | 7.2 | |
| GNSS mapping | 681 | 2042.0 | 22.1 |
| Route Location | Mapping Technique | ||
|---|---|---|---|
| CAD File Conversion | Image Warping | GNSS Mapping | |
| Dangjin | 8661 | 7972 | 3357 |
| Seosan | 19,633 | 16,984 | 3230 |
| Nonsan | 14,211 | 13,994 | 2814 |
| Cheonan | 23,588 | 19,331 | 4130 |
| Gongju | 27,845 | 26,256 | 4949 |
| Mapping Technique | Average Working Time (min/km) | Production Cost (US$/km) 3 | ||
|---|---|---|---|---|
| Field Survey 1 | Map-making 2 | Total | ||
| CAD file conversion | - | 99 | 99 | 40.90 |
| Image warping | 31 | 149 | 180 | 81.84 |
| GNSS mapping | 175 | 61 | 236 | 139.64 |
| Total station | 195 | 120 | 315 | 180.66 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kweon, H.; Kim, M.; Lee, J.-W.; Seo, J.I.; Rhee, H. Comparison of Horizontal Accuracy, Shape Similarity and Cost of Three Different Road Mapping Techniques. Forests 2019, 10, 452. https://doi.org/10.3390/f10050452
Kweon H, Kim M, Lee J-W, Seo JI, Rhee H. Comparison of Horizontal Accuracy, Shape Similarity and Cost of Three Different Road Mapping Techniques. Forests. 2019; 10(5):452. https://doi.org/10.3390/f10050452
Chicago/Turabian StyleKweon, Hyeongkeun, Myeongjun Kim, Joon-Woo Lee, Jung Il Seo, and Hakjun Rhee. 2019. "Comparison of Horizontal Accuracy, Shape Similarity and Cost of Three Different Road Mapping Techniques" Forests 10, no. 5: 452. https://doi.org/10.3390/f10050452
APA StyleKweon, H., Kim, M., Lee, J. -W., Seo, J. I., & Rhee, H. (2019). Comparison of Horizontal Accuracy, Shape Similarity and Cost of Three Different Road Mapping Techniques. Forests, 10(5), 452. https://doi.org/10.3390/f10050452