Correction of Erroneous LiDAR Measurements in Artificial Forest Canopy Experimental Setups

Abstract
:1. Introduction
2. Materials and Methods
2.1. TLS Instrument
2.2. Measurement Setups

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Leaves Setup | Layers Setup Values | Branches Setup |
|---|---|---|---|
| Scanning distance | 2.5 m, 5 m, 7.5 m, 10 m, 12.5 m, 15 m | 2.5 m, 5 m, 7.5 m, 10 m, 12.5 m, 15 m | 2.5 m, 5 m, 7.5 m, 10 m, 12.5 m, 15 m |
| Incident angle | 0°, 15°, 30°, 45°, 55° | 0°, 15°, 30°, 45°, 55° | 0°, 15°, 30°, 45°, 55° |
| Scanning resolution | 1:1, 1:2, 1:4 | 1:1, 1:2, 1:4 | 1:1, 1:2, 1:4 |
| Reflectance 785 nm | 10%, 50%, 90% | 50% | 30% |
| Dimension | 5.0 cm × 5.0 cm | 5.0 cm × 5.0 cm | 5.0 cm, 8.0 cm, 10.0 cm diameter |

2.3. Manual Extraction of Ghost Points and Ghost Points Ratio Computation

2.4. Statistical Analysis
 ; and β0, β1, β2, β3 and β4 are parameters of the model.
; and β0, β1, β2, β3 and β4 are parameters of the model.2.5. Extraction of Ghost Points

3. Results
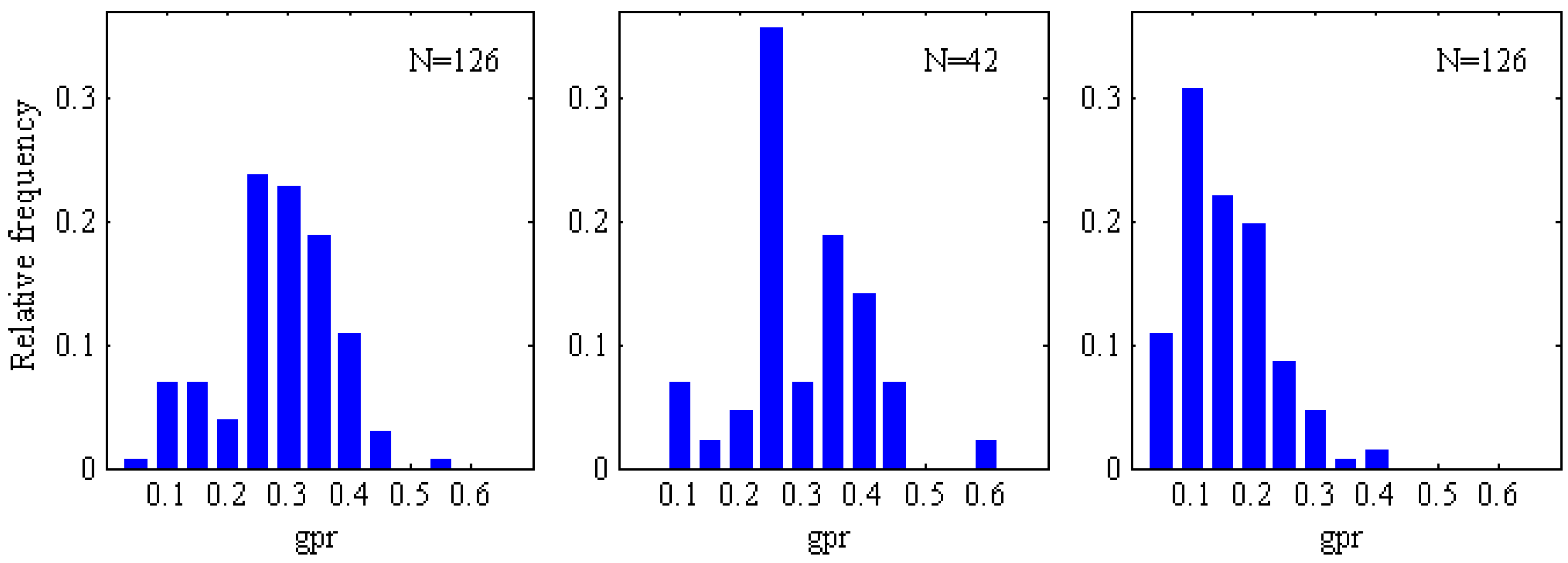
3.1. Ghost Points Ratio (gpr) Distribution



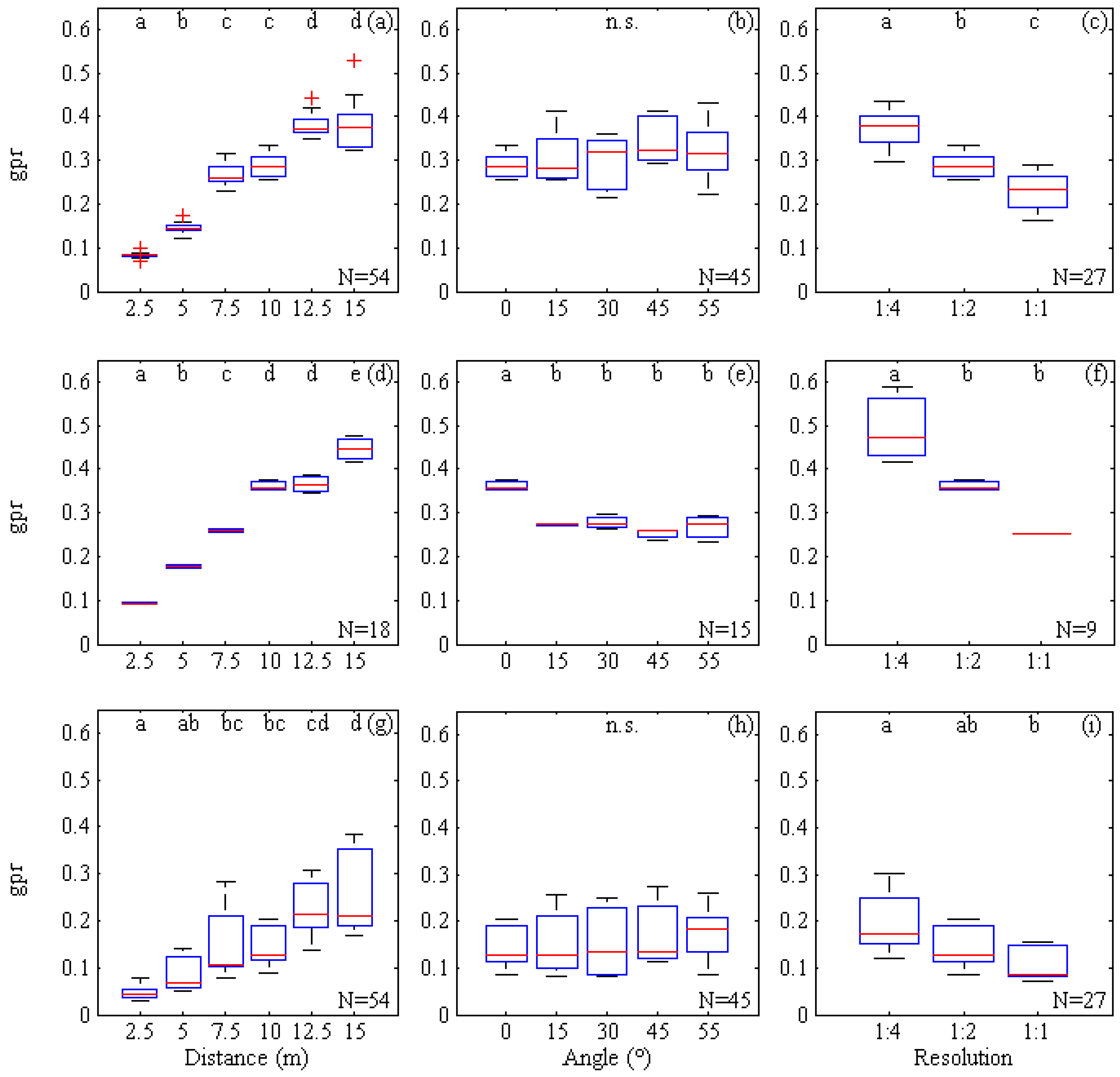
3.2. Statistical Analysis
| Model | Variable | Coefficient | Estimate | Standard Error |
|---|---|---|---|---|
| Leaves (Equation (5)) | Intercept | β0 | 0.151 | 0.022 |
| dsL | β1 | 0.026 | 0.002 | |
| rfL | β2 | −0.051 | 0.013 | |
| rsL | β3 | −0.173 | 0.029 | |
| Intercept | β0 | 0.181 | 0.034 | |
| Layers (Equation (6)) | dsLA | β1 | 0.029 | 0.002 |
| rsLA | β2 | −0.263 | 0.047 | |
| Intercept | β0 | 0.219 | 0.020 | |
| Branches (Equation (7)) | dsB | β1 | 0.016 | 0.001 |
| diB | β2 | −2.033 | 0.162 | |
| rsB | β3 | −0.121 | 0.022 |
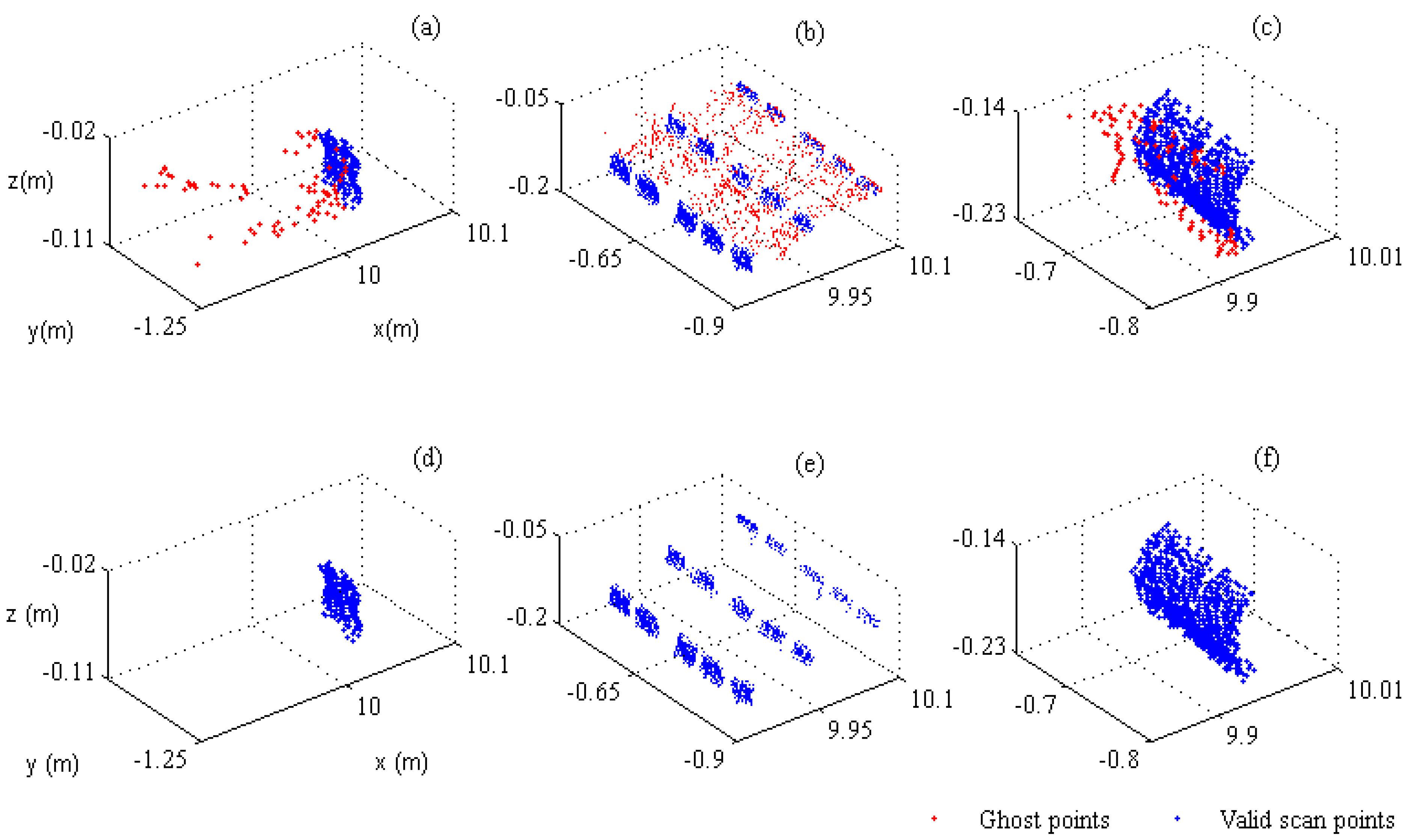
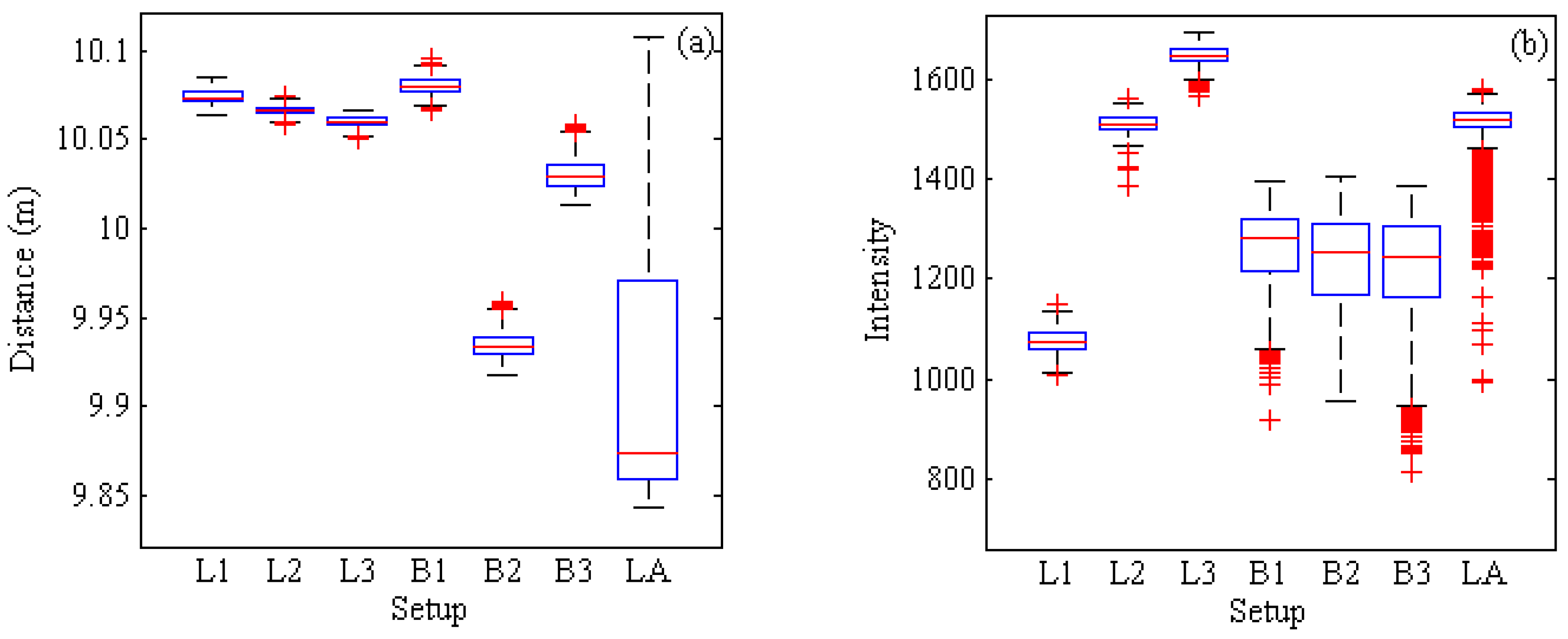
3.3. Extraction of Ghost Points from Point Clouds

| Setup | Mean (%) | SD |
|---|---|---|
| L1 | 71.52 | 10.2 |
| L2 | 66.37 | 13.1 |
| L3 | 67.00 | 10.4 |
| LA | 67.54 | 13.2 |
| B1 | 62.26 | 6.4 |
| B2 | 65.88 | 12.4 |
| B3 | 63.67 | 7.8 |
| Setup | 2.5 m | 5 m | 7.5 m | 10 m | 12.5 m | 15 m | Mean (%) | SD | |
|---|---|---|---|---|---|---|---|---|---|
| L1 | d (m) | 0.01 | 0.01 | 0.01 | 0.015 | 0.015 | 0.015 | 97.7 | 8.6 |
| a (%) | 50 | 50 | 62.5 | 62.5 | 62.5 | 75 | |||
| L2 | d (m) | 0.006 | 0.007 | 0.007 | 0.012 | 0.018 | 0.02 | 102.3 | 10.1 |
| a (%) | 50 | 50 | 62.5 | 62.5 | 75 | 75 | |||
| L3 | d (m) | 0.005 | 0.006 | 0.007 | 0.008 | 0.01 | 0.012 | 100.5 | 3.7 |
| a (%) | 50 | 50 | 62.5 | 62.5 | 62.5 | 62.5 | |||
| LA | d (m) | 0.006 | 0.007 | 0.008 | 0.009 | 0.01 | 0.017 | 101.7 | 2.5 |
| a (%) | 50 | 50 | 50 | 50 | 50 | 50 | |||
| B1 | d (m) | 0.008 | 0.008 | 0.008 | 0.015 | 0.015 | 0.015 | 101.0 | 8.8 |
| a (%) | 62.5 | 62.5 | 62.5 | 62.5 | 75 | 75 | |||
| B2 | d (m) | 0.009 | 0.01 | 0.01 | 0.018 | 0.02 | 0.02 | 99.5 | 4.6 |
| a (%) | 62.5 | 62.5 | 62.5 | 62.5 | 75 | 75 | |||
| B3 | d (m) | 0.009 | 0.01 | 0.01 | 0.018 | 0.02 | 0.02 | 98.3 | 7.8 |
| a (%) | 62.5 | 62.5 | 62.5 | 62.5 | 75 | 75 |
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Parker, G.G. Structure and Microclimate of Forest Canopies. In Forest Canopies; Lowman, M.D., Nadkarni, N.M., Eds.; Academic Press: San Diego, CA, USA, 1995; pp. 73–106. [Google Scholar]
- Harper, J.L. Canopies as populations. In Plant Canopies: Their Growth, Form and Function; Russell, G., Marshall, B., Jarvis, P.G., Eds.; Cambridge University Press: Cambridge, UK, 1989; pp. 105–128. [Google Scholar]
- Niklas, K.J. Evolutionary walks through a land plant morphospace. J. Exp. Bot. 1999, 50, 39–52. [Google Scholar] [CrossRef]
- Porter, J.R. Modules, models and meristems in plant architecture. In Plant Canopies: Their Growth, Form and Function; Russell, G., Marshall, B., Jarvis, P.G., Eds.; Cambridge University Press: Cambridge, UK, 1989; pp. 143–159. [Google Scholar]
- Seidel, D.; Fleck, S.; Leuschner, C.; Hammett, T. Review of ground-based methods to measure the distribution of biomass in forest canopies. Ann. For. Sci. 2011, 68, 225–244. [Google Scholar]
- Zheng, G.; Moskal, L.M. Computational-Geometry-Based Retrieval of Effective Leaf Area Index Using Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3958–3969. [Google Scholar] [CrossRef]
- Newnham, G.; Armston, J.; Muir, J.; Goodwin, N.; Tindall, D.; Culvenor, D.; Püschel, P.; Nyström, M.; Johansen, K. Evaluation of Terrestrial Laser Scanners for Measuring Vegetation Structure. CSIRO Sustainable Agriculture Flagship. Manuscript ID: EP124571; CSIRO Research Publications Repository. 2012. Available online: https://publications.csiro.au/rpr/pub? pid=csiro:EP124571 (accessed on 20 May 2014).
- Côté, J.-F.; Widlowski, J.-L.; Fournier, R.A.; Verstraete, M.M. The structural and radiative consistency of three-dimensional tree reconstructions from terrestrial lidar. Remote Sens. Environ. 2009, 113, 1067–1081. [Google Scholar] [CrossRef]
- Balduzzi, M.A.F.; van der Zande, D.; Stuckens, J.; Verstraeten, W.W.; Coppin, P. The Properties of Terrestrial Laser System Intensity for Measuring Leaf Geometries: A Case Study with Conference Pear Trees (Pyrus communis). Sensors 2011, 11, 1657–1681. [Google Scholar]
- Hebert, M.; Krotkov, E. 3D measurements from imaging laser radars: How good are they? Image Vis. Comput. 1992, 10, 170–178. [Google Scholar] [CrossRef]
- Mills, J.; Barber, D. Geomatics Techniques for Structural Surveying. J. Surv. Eng. 2004, 130, 56–64. [Google Scholar] [CrossRef]
- Tang, P.; Akinci, B.; Huber, D. Quantification of edge loss of laser scanned data at spatial discontinuities. Autom. Constr. 2009, 18, 1070–1083. [Google Scholar] [CrossRef]
- Magney, T.S.; Eusden, S.A.; Eitel, J.U.H.; Logan, B.A.; Jiang, J.; Vierling, L.A. Assessing leaf photoprotective mechanisms using terrestrial LiDAR: Towards mapping canopy photosynthetic performance in three dimensions. New Phytol. 2014, 201, 344–356. [Google Scholar] [CrossRef]
- Van der Zande, D.; Stuckens, J.; Verstraeten, W.W.; Mereu, S.; Muys, B.; Coppin, P. 3D modeling of light interception in heterogeneous forest canopies using ground-based LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 792–800. [Google Scholar] [CrossRef]
- Lichti, D.; Jamtsho, S. Angular resolution of terrestrial laser scanners. Photogramm. Rec. 2006, 21, 141–160. [Google Scholar] [CrossRef]
- Kwak, D.-A.; Lee, W.-K.; Kafatos, M.; Son, Y.; Cho, H.-K.; Lee, S.-H. Estimation of effective plant area index for South Korean forests using LiDAR system. Sci. China Life Sci. 2010, 53, 898–908. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar]
- Cang, Y.; Borenstein, J. Characterization of a 2-D Laser Scanner for Mobile Robot Obstacle Negotiation. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 3, pp. 2512–2518.
- Boehler, W.; Vicent, M.B.; Marbs, A. Investigating laser scanner accuracy. In Proceedings of the XIXth CIPA Symposium, Antalya, Turkey, 30 September–4 October 2003.
- Tang, P.; Huber, D.; Akinci, B. A Comparative Analysis of Depth-Discontinuity and Mixed-Pixel Detection Algorithms. In Proceedings of the Sixth International Conference 3-D Digit, Imaging Model (3DIM 2007), 21–23 August 2007; pp. 29–38.
- Adams, M.D.; Probert, P.J. The Interpretation of Phase and Intensity Data from AMCW Light Detection Sensors for Reliable Ranging. Int. J. Robot. Res. 1996, 15, 441–458. [Google Scholar] [CrossRef]
- Tuley, J.; Vandapel, N.; Hebert, M. Analysis and Removal of Artifacts in 3-D LADAR Data. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2203–2210.
- Vaccari, S.; van Leeuwen, M.; Calders, K.; Coops, C.; Herold, M. Bias in lidar-based canopy gap fraction estimates. Remote Sens. Lett. 2013, 4, 391–399. [Google Scholar] [CrossRef]
- Cifuentes, R.; van der Zande, D.; Farifteh, J.; Salas, C.; Coppin, P. Effects of voxel size and sampling setup on the estimation of forest canopy gap fraction from terrestrial laser scanning data. Agric. For. Meteorol. 2014, 194, 230–240. [Google Scholar] [CrossRef]
- Jupp, D.L.B.; Culvenor, D.S.; Lovell, J.L.; Newnham, G.J.; Strahler, A.H.; Woodcock, C.E. Estimating forest LAI profiles and structural parameters using a ground-based laser called “Echidna”. Tree Physiol. 2009, 29, 171–181. [Google Scholar]
- Andrieu, B.; Sohbi, Y.; Ivanov, N. A Direct Method to Measure Bidirectional Gap Fraction in Vegetation Canopies. Remote Sens. Environ. 1994, 50, 61–66. [Google Scholar] [CrossRef]
- Pesci, A.; Teza, G.; Bonali, E. Terrestrial Laser Scanner Resolution: Numerical Simulations and Experiments on Spatial Sampling Optimization. Remote Sens. 2011, 3, 167–184. [Google Scholar] [CrossRef]
- Lichti, D.D.; Gordon, S.J.; Tipdecho, T. Error models and propagation in directly georeferenced Terrestrial Laser Scanner Networks. J. Surv. Eng. 2005, 131, 135–142. [Google Scholar] [CrossRef]
- Matthies, L.; Bergh, C.; Castano, A.; Macedo, J.; Manduchi, R. Obstacle Detection in Foliage with Ladar and Radar. In Robotics Research, STAR 15; Dario, P., Chatila, R., Eds.; Springer-Verlag Berlin: Heidelberg, Germany, 2005; pp. 291–300. [Google Scholar]
- Rosell Polo, J.R.; Sanz, R.; Llorens, J.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef] [Green Version]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric Calibration of Terrestrial Laser Scanners with External Reference Targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Cifuentes, R.; Van der Zande, D.; Salas, C.; Farifteh, J.; Coppin, P. Correction of Erroneous LiDAR Measurements in Artificial Forest Canopy Experimental Setups. Forests 2014, 5, 1565-1583. https://doi.org/10.3390/f5071565
Cifuentes R, Van der Zande D, Salas C, Farifteh J, Coppin P. Correction of Erroneous LiDAR Measurements in Artificial Forest Canopy Experimental Setups. Forests. 2014; 5(7):1565-1583. https://doi.org/10.3390/f5071565
Chicago/Turabian StyleCifuentes, Renato, Dimitry Van der Zande, Christian Salas, Jamshid Farifteh, and Pol Coppin. 2014. "Correction of Erroneous LiDAR Measurements in Artificial Forest Canopy Experimental Setups" Forests 5, no. 7: 1565-1583. https://doi.org/10.3390/f5071565
APA StyleCifuentes, R., Van der Zande, D., Salas, C., Farifteh, J., & Coppin, P. (2014). Correction of Erroneous LiDAR Measurements in Artificial Forest Canopy Experimental Setups. Forests, 5(7), 1565-1583. https://doi.org/10.3390/f5071565