Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Test Area and Field Reference
2.2. Kinect Measurements
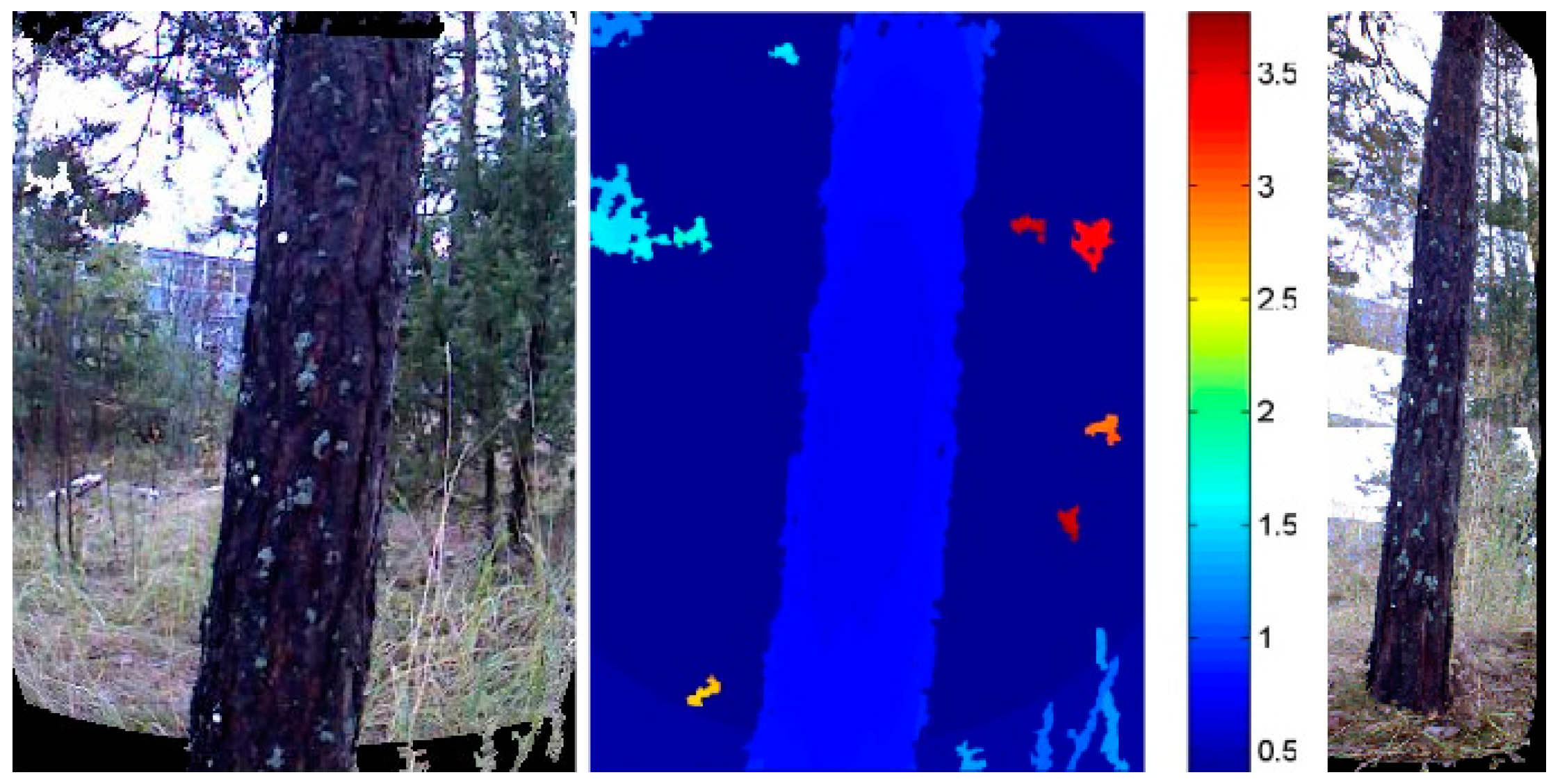
2.3. Kinect Data Processing
- Extraction of trunk skeleton from range image by thresholding along the direction of the camera’s depth axis, i.e., removal of the background to produce a trunk mask;
- Automatic detection of the markers on the trunk from RGB images (first converted to grey scale) by comparing intensities, as markers are brighter than surroundings;
- Extraction of the point cloud from range images in a buffer area of detected marker positions;
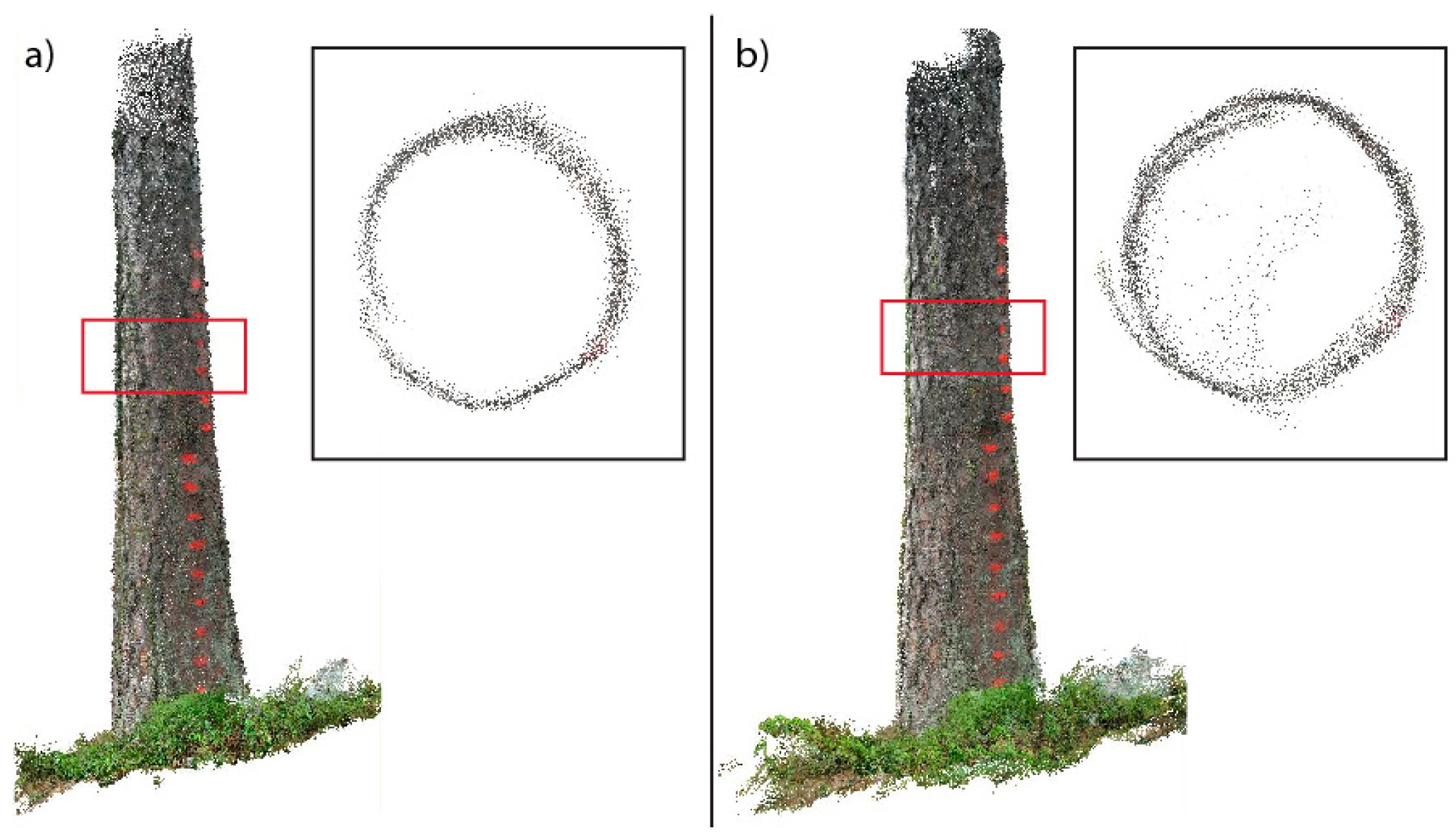
- Fitting an optimum circle to the extracted point cloud and computing the diameter of the reconstructed circle at the corresponding height.
2.4. Measurements with Tango Sensor
2.5. Tango Data Processing
2.6. Accuracy Assessment
2.7. Local Field Reference Test
- (1)
- All 292 plots of Evo data were applied as references to develop prediction models using an area-based method. Developed models were then used to make the estimation of plot attributes for 33 plots in Kalkkinen. This corresponds to a situation where the calibration data comes from a different area than the area being the subject of inventory.
- (2)
- Kalkkinen data were used for both developing models and making predictions by area-based method. In this case, two third of data were used as training and one third as testing. The procedure was repeated 100 times. This corresponds to an ideal situation where calibration data can be collected from the area being studied.
- (3)
- A hybrid approach, consisting of the currently applied solution added with local reference data. All Evo data and 10% of Kalkkinen data (randomly selected 96 trees) were used to develop models. Predictions were conducted firstly for individual trees and then individual predictions were aggregated to plot level followed by area-based estimations. This corresponds to a situation where a certain amount of local reference data can be collected from the area being studied.
3. Results
3.1. Measuring Individual Trees
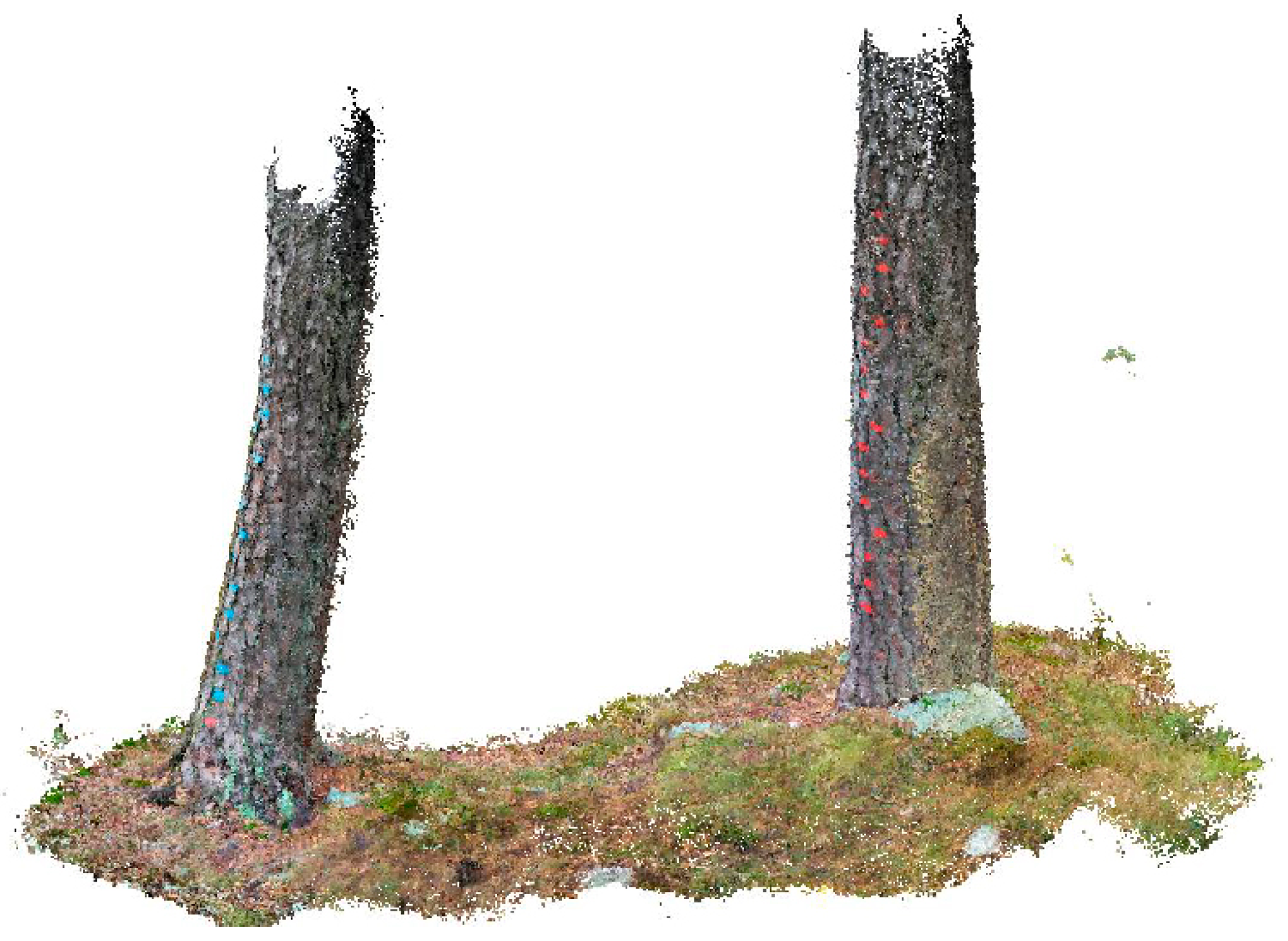
3.2. Measuring Multiple Trees
3.3. Local Field Reference Test
4. Discussion
5. Conclusions
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Houghton, R.A.; Hall, F.; Goetz, S.J. Importance of biomass in the global carbon cycle. J. Geophys. Res. 2009, 114, 2156–2202. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X. Terrestrial laser scanning in forest inventories. ISPRS-J. Photogramm. Remote Sens. 2015, 115, 63–77. [Google Scholar] [CrossRef]
- Tomppo, E.; Olsson, H.; Ståhl, G.; Nilsson, M.; Hagner, O.; Katila, M. Combining national forest inventory field plots and remote sensing data for forest databases. Remote Sens. Environ. 2008, 112, 1982–1999. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Inkinen, M.; Engdahl, M.; Linko, S.; Zhu, Y.-H. Accuracy comparison of various remote sensing data sources in the retrieval of forest stand attributes. For. Ecol. Manag. 2000, 128, 109–120. [Google Scholar] [CrossRef]
- Nilsson, M. Estimation of tree heights and stand volume using an airborne lidar system. Remote Sens. Environ. 1996, 56, 1–7. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Packalen, P.; Hyyppä, J. Estimation of stem volume using laser scanning-based canopy height metrics. Forestry 2006, 79, 217–229. [Google Scholar] [CrossRef]
- Hyyppä, J.; Inkinen, M. Detecting and estimating attributes for single trees using laser scanner. Photogramm. J. Finl. 1999, 16, 27–42. [Google Scholar]
- Brandtberg, T. Automatic Individual Tree-Based Analysis of High Spatial Resolution Remotely Sensed Data; Acta Universitatis Agriculturae Sueciae Silvestria: Uppsala, Sweden, 1999. [Google Scholar]
- Pouliot, D.A.; King, D.J.; Bell, F.W.; Pitt, D.G. Automated tree crown detection and delineation in high-resolution digital camera imagery of coniferous forest regeneration. Remote Sens. Environ. 2002, 82, 322–334. [Google Scholar] [CrossRef]
- Holmstrom, H.; Kallur, H.; Stahl, G. Cost-plus-loss analyses of forest inventory strategies based on kNN-assigned reference sample plot data. Silva Fenn. 2003, 37, 381–398. [Google Scholar]
- Liang, X.; Kankare, V.; Yu, X.; Hyyppä, J.; Holopainen, M. Automated stem curve measurement using terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Heipke, C. Crowdsourcing geospatial data. ISPRS-J. Photogramm. Remote Sens. 2010, 65, 550–557. [Google Scholar] [CrossRef]
- Fritz, S.; McCallum, I.; Schill, C.; Perger, C.; Grillmayer, R.; Achard, F.; Kraxner, F.; Obersteiner, M. Geo-Wiki.Org: The Use of Crowdsourcing to Improve Global Land Cover. Remote Sens. 2009, 1, 345–354. [Google Scholar] [CrossRef]
- Philly Tree Map. Available online: https://www.opentreemap.org/phillytreemap/map/ (accessed on 4 December 2017).
- Urban Forest Maps. Available online: https://urbanforestmap.org/ (accessed on 4 December 2017).
- Foster, A.; Dunham, I.M.; Kaylor, C. Citizen Science for Urban Forest Management? Predicting the Data Density and Richness of Urban Forest Volunteered Geographic Information. Urban Sci. 2017, 3, 30. [Google Scholar] [CrossRef]
- Molinier, M.; López-Sánchez, C.A.; Toivanen, T.; Korpela, I.; Corral-Rivas, J.J.; Tergujeff, R.; Häme, T. Relasphone—Mobile and Participative In Situ Forest Biomass Measurements Supporting Satellite Image Mapping. Remote Sens. 2016, 8, 869. [Google Scholar] [CrossRef]
- Vastaranta, M.; Latorre, E.G.; Luoma, V.; Saarinen, N.; Holopainen, M.; Hyyppä, J. Evaluation of a smartphone app for forest sample plot measurements. Forests 2015, 6, 1179–1194. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Honkavaara, E.; Liu, J. Forest data collection using terrestrial image-based point clouds from a handheld camera compared to terrestrial and personal laser scanning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5117–5132. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Hyyppä, J.; Liang, X.; Kaartinen, H.; Yu, X.; Lindberg, E.; Holmgren, J.; Qin, Y.; Mallet, C.; Ferraz, A.; et al. International benchmarking of the individual tree detection methods for modeling 3-D canopy structure for silviculture and forest ecology using airborne laser scanning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5011–5027. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkänen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M.; et al. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2011, 85, 27–40. [Google Scholar] [CrossRef]
- Henry, P.; Krainin, M.; Herbst, E.; Ren, X.; Fox, D. RGB-D mapping: Using Kinect-style depth cameras for dense 3D modeling of indoor environments. Int. J. Robot. Res. 2012, 31, 1–17. [Google Scholar] [CrossRef]
- Kroshelham, K.; Oude Elberink, S. Accuracy and Resolution of Kinect Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed]
- Kroshelham, K. Accuracy analysis of Kinect Depth data. In Proceedings of the ISPRS Calgary 2011 Workshop International Archives Photogrammetry Remote Sensing Spatial Information Sciences, Calgary, AB, Canada, 29–31 August 2011; Volume XXXVIII-5/W12. [Google Scholar]
- Chen, J.M.; Liu, X.; Zhao, Z.X.; Zhong, W.T. Research on landscape environment with 3D-reconstruction and volume measurement of fruit tree canopy based on Kinect. Adv. Mater. Res. 2013, 788, 480–485. [Google Scholar] [CrossRef]
- Qi, X.; Lichti, D.; El-Badry, M.; Chow, J.; Ang, K. Vertical Dynamic Deflection Measurement in Concrete Beams with the Microsoft Kinect. Sensors 2014, 14, 3293–3307. [Google Scholar] [CrossRef] [PubMed]
- Ostovar, A. Enhancing Forestry Object Detection Using Multiple Features. Master’s Thesis, Umeå University, Umeå, Sweden, 2011. [Google Scholar]
- Pordel, M.; Hellström, T.; Ostovar, A. Integrating Kinect Depth Data with a Stochastic Object Classification Framework for Forestry Robots. In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics, Rome, Italy, 28–31 July 2012; pp. 314–320. [Google Scholar]
- Brouwer, T. Low Budget Ranging for Forest Measurements. Master’s Thesis, Wageningen University, Wageningen, Germany, 2013. [Google Scholar]
- Tango. Available online: https://get.google.com/tango/ (accessed on 17 November 2017).
- Depth Perception. Available online: https://developers.google.com/tango/overview/depth-perception (accessed on 17 November 2017).
- It’s Your Turn. Build the Future. Available online: https://developers.google.com/tango/ (accessed on 17 November 2017).
- Diakité, A.A.; Zlatanova, S. First experiments with the tango tablet for indoor scanning. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; Volume III-4. [Google Scholar] [CrossRef]
- Zhang, E.; Cohen, M.F.; Curless, B. Emptying, refurnishing, and relighting indoor spaces. ACM Trans. Graph. 2016, 35. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, Š.; Tunák, D.; Chudý, F.; Kardoš, M. Tango in forests—An initial experience of the use of the new Google technology in connection with forest inventory tasks. Comput. Electron. Agric. 2017, 141, 109–117. [Google Scholar] [CrossRef]
- Päivinen, R.; Nousiainen, M.; Korhonen, K. Puutunnusten mittaamisen luotettavuus. Folia Forestalia 1992, 787, 1–18. [Google Scholar]
- Lenovo Phab 2 Pro. Available online: http://www3.lenovo.com/us/en/virtual-reality-and-smart-devices/augmented-reality/-phab-2-pro/Lenovo-Phab-2-Pro/p/WMD00000220 (accessed on 17 November 2017).
- Matterport Scenes. Available online: https://play.google.com/store/apps/details?id=com.matterport.capture&hl=en (accessed on 17 November 2017).
- Yu, X.; Hyyppä, J.; Kukko, A.; Maltamo, M.; Kaartinen, H. Change detection techniques for canopy height growth measurements using airborne laser scanner data. Photogramm. Eng. Remote Sens. 2006, 72, 1339–1348. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Vastaranta, M.; Holopainen, M.; Viitala, R. Predicting individual tree attributes from airborne laser point clouds based on random forest technique. ISPRS-J. Photogramm. Remote Sens. 2011, 66, 28–37. [Google Scholar] [CrossRef]
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J.; et al. Advances in forest inventory using airborne laser scanning. Remote Sens. 2012, 4, 1190–1207. [Google Scholar] [CrossRef]
- Melkas, T.; Vastaranta, M.; Holopainen, M.; Kivilähde, J.; Merimaa, M. Puun läpimitan mittauksen tarkkuus ja tehokkuus laser—Digitaalikuvatekniikkaan perustuen. Metsätieteen Aikakauskirja 2009, 4, 325–340. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Minimum | Maximum | Mean | Standard Deviation | |
|---|---|---|---|---|
| Kalkkinen | ||||
| Mean tree height (m) | 7.12 | 28.14 | 21.94 | 5.43 |
| Mean DBH (cm) | 6.79 | 25.83 | 18.40 | 4.89 |
| Volume (m3/ha) | 21.20 | 540.39 | 292.32 | 122.75 |
| Evo | ||||
| Mean tree height (m) | 3.9 | 31.7 | 18.0 | 6.1 |
| Mean DBH (cm) | 7.6 | 50.8 | 18.3 | 6.9 |
| Volume (m3/ha) | 0.4 | 586.2 | 148.2 | 110.7 |
| Kinect Data vs. Caliper | Caliper (Mean of Two Directions) vs. Tape | Kinect Data (Mean) vs. Tape | Tango (Mean) vs. Tape | |||
|---|---|---|---|---|---|---|
| East-West | North-South | Mean | ||||
| Bias (cm) | −2.60 | 0.30 | 1.50 | 0.95 | 0.54 | 0.33 |
| RMSE (cm) | 2.25 | 2.63 | 2.50 | 1.16 | 1.90 | 0.73 |
| RMSE-% | 10.2 | 10.0 | 10.0 | 5.9 | 7.3 | 1.89 |
| Strategy 1—Reference Plots Located at Different Forest Area | ||||
| Bias | RMSE | RMSE-% | R | |
| Mean DBH (cm) | 5.08 | 6.27 | 32.85 | 0.74 |
| Volume (m3/ha) | 56.98 | 104.32 | 34.32 | 0.80 |
| Strategy 2—Reference Plots Located at Test Site | ||||
| Mean DBH (cm) | 0.22 | 2.90 | 15.18 | 0.83 |
| Volume (m3/ha) | −3.41 | 96.06 | 31.61 | 0.73 |
| Strategy 3—Reference Plots Located at Different Forest Area, Selective Measurements in Test Site | ||||
| Mean DBH (cm) | 3.51 | 4.67 | 24.42 | 0.83 |
| Volume (m3/ha) | 24.48 | 96.97 | 31.90 | 0.77 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hyyppä, J.; Virtanen, J.-P.; Jaakkola, A.; Yu, X.; Hyyppä, H.; Liang, X. Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information. Forests 2018, 9, 6. https://doi.org/10.3390/f9010006
Hyyppä J, Virtanen J-P, Jaakkola A, Yu X, Hyyppä H, Liang X. Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information. Forests. 2018; 9(1):6. https://doi.org/10.3390/f9010006
Chicago/Turabian StyleHyyppä, Juha, Juho-Pekka Virtanen, Anttoni Jaakkola, Xiaowei Yu, Hannu Hyyppä, and Xinlian Liang. 2018. "Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information" Forests 9, no. 1: 6. https://doi.org/10.3390/f9010006
APA StyleHyyppä, J., Virtanen, J. -P., Jaakkola, A., Yu, X., Hyyppä, H., & Liang, X. (2018). Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information. Forests, 9(1), 6. https://doi.org/10.3390/f9010006