Optimal Design of Demand-Responsive Feeder Transit Services with Passengers’ Multiple Time Windows and Satisfaction

Abstract
:1. Introduction
2. Literature
- (1)
- Traditional DRTs only consider passengers’ single time windows and few of them take multiple time windows into account. This implies a lack of integrated operation to guide passenger boarding in the specified time periods from several preferred time windows and routing of transit from selected demand points to destinations.
- (2)
- Only a few studies have considered the impact of the expected ride time of passengers, which is related to passenger satisfaction, on the vehicle routing. This implies a lack of an integrated operation that balances passenger satisfaction and operation costs.
- (3)
- DRTs are NP-hard problems as they are extensions of the classic VRPs and an efficient algorithm needs to be designed to solve this problem.
3. Methodology
3.1. Research Framework
- (1)
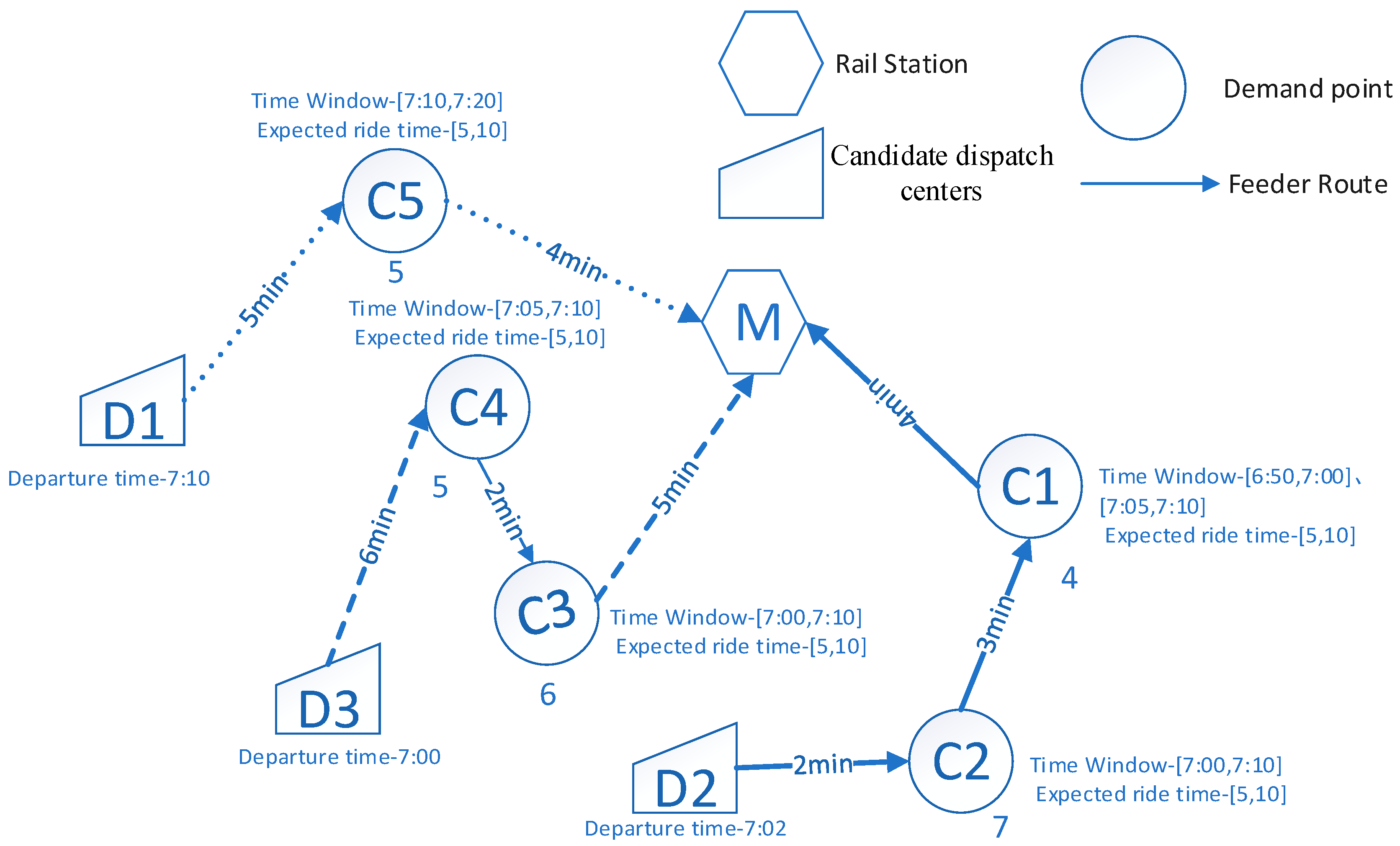
- Passengers at the demand point are allowed to travel in one or several preferred boarding time windows. It is possible to investigate the number of passengers at each demand point around the rail station and ignore the passenger flow between them.
- (2)
- The distance and travel time between demand points, dispatch centers, and rail stations are obtained using Baidu GIS.
- (3)
- Each demand point can only be covered once by one vehicle.
- (4)
- The passenger’s satisfaction is only related with her/his ride time. The reduction in passenger satisfaction can be estimated.
3.2. Model Formulation
3.2.1. Notation
3.2.2. Formulation
4. Improved Bat Algorithm for Resolving DRT
4.1. Coding Scheme
4.2. Fitness Evaluation
4.3. Heuristic Algorithm for Generating Initial Population
- Step 1
- Read input data for the DRT model, including: , , Q, and .
- Step 2
- Randomly choose a dispatch center and let and . For each vehicle k located at the dispatch center , turn to Step 3 to build the route.
- Step 3
- According to the constraints, such as , , and , find the feasible set of next vehicular nodes in after the vehicle visiting the current vehicular node , before randomly selecting the vehicular node as the next visiting point (i.e., = 1). If , let and turn to Step 2. Otherwise, return to Step 3.
- Step 4
- Let . If , output the result. Otherwise, turn to Step 3.
4.4. Update Rules for Speed and Location of Bats
4.5. Local Search Rules of Bats
4.6. Specific Steps of the Hybrid Bat Algorithm
- Step 1
- Initialize parameters, including and , etc.
- Step 2
- Generate the initial population and calculate the fitness function of each bat to determine the current optimal solution . Let , before turning to Step 3.
- Step 3
- According to Equations (16) and (17), calculate the position and speed of each bat at time .
- Step 4
- Calculate the population diversity to obtain a certain probability of random disturbance operations, before perturbing the current optimal solution to the new position . All the existing bats are rearranged to update the current optimal solution.
- Step 5
- Update and , etc.
- Step 6
- Let . If , turn to Step 3. Otherwise, output the result.
5. Numerical Example
5.1. Example Description
- Maximum capacity of feeder bus route: Q = 12 per;
- Maximum length of vehicle route: = 9 km;
- Minimum travel time of vehicle route: = 3 min;
- Operational cost: = 6.5 yuan/km;
- The loss of passenger satisfaction reduction: = 1 yuan/person;
- The parameters of the hybrid algorithm: , , , , = 5, and = 45°.
5.2. Results
5.3. Sensitivity Analysis
- (1)
- When the scale of the problem is small, all three heuristic algorithms can find the optimal solution. As the scale of the problem becomes larger, the quality of the solutions worsens.
- (2)
- The quality and the robustness of the improved BA are better than those of the standard BA and GSO. This shows that there is effective improvement of the algorithm when introducing the idea that GSO’s “small part-segmented rogues walk at random” into standard BA to improve the speed and position updates in the formulas of bats, which can maintain the diversity of groups.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ceder, A. Stepwise multi-criteria and multi-strategy design of public transit shuttles. J. Multi-Criteria Decis. Anal. 2009, 16, 21–38. [Google Scholar] [CrossRef]
- Wei, M.; Sun, B. Bi-level programming model for multi-modal regional bus timetable and vehicle dispatch with stochastic travel time. Clust. Comput. 2017, 20, 401–411. [Google Scholar] [CrossRef]
- Savelsbergh, A.L.M. An extended demand responsive connector. EURO J. Transp. Logist. 2017, 6, 25–50. [Google Scholar]
- Shen, J.X.; Yang, S.Q.; Gao, X.M.; Qiu, F. Vehicle routing and scheduling of demand-responsive connector with on-demand stations. Adv. Mech. Eng. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Daniela, F.; Elena, M.; Paola, P. Ant colony system for a VRP with multiple time windows and multiple visits. J. Interdiscipl. Math. 2007, 10, 263–284. [Google Scholar]
- Belhaiza, S.; Hansen, P.; Laporte, G. A hybrid variable neighborhood tabu search heuristic for the vehicle routing problem with multiple time windows. Comput. Oper. Res. 2014, 52, 269–281. [Google Scholar] [CrossRef]
- Maral, S.; Saeed, K.; Iraj, M.; Nezam, M.A. A partial delivery bi-objective vehicle routing model with time windows and customer satisfaction function. Mediterr. J. Soc. Sci. 2016, 7, 101–111. [Google Scholar]
- Azi, N.; Gendreau, M.; Potvin, J.Y. An exact algorithm for a single-vehicle routing problem with time windows and multiple routes. Eur. J. Oper. Res. 2007, 178, 755–766. [Google Scholar] [CrossRef]
- Savelsbergh, M.W.P.; Sol, M. The general pickup and delivery problem. Transp. Sci. 1995, 29, 17–29. [Google Scholar] [CrossRef]
- Desaulniers, G.; Desrosiers, J.; Erdmann, A.; Solomon, M.M.; Soumis, F. VRP with pickup and delivery. In The Vehicle Routing Problem; SIAM Monographs on Discrete Mathematics and Applications; Toth, P., Vigo, D., Eds.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2002. [Google Scholar]
- Cordeau, J.F.; Laporte, G. The dial-a-ride problem: Models and algorithms. Ann. Oper. Res. 2007, 153, 29–46. [Google Scholar] [CrossRef]
- Laporte, G. Fifty years of vehicle routing. Transp. Sci. 2009, 43, 408–416. [Google Scholar] [CrossRef]
- Parragh, S.N.; Doerner, K.F.; Hartl, R.F. A survey on pickup and delivery problems. J. FürBetriebswirtschaft 2008, 58, 21–51. [Google Scholar] [CrossRef]
- Cordeau, J.; Laporte, G.; Potvin, J.Y.; Savelsbergh, M.W. Chapter 7 transportation on demand. In Transportation, Handbooks in Operations Research and Management Science; Barnhart, C., Laporte, G., Eds.; Elsevier: Amsterdam, The Netherlands, 2007; Volume 14, pp. 429–466. [Google Scholar]
- Quadrifoglio, L.; Li, X. A methodology to derive the critical demand density for designing and operating feeder transit services. Transp. Res. Part B 2009, 43, 922–935. [Google Scholar] [CrossRef]
- Hashimoto, H.; Yagiura, M.; Imahori, S.; Ibaraki, T. Recent progress of local search in handling the time window constraints of the vehicle routing problem. Ann. Oper. Res. 2013, 204, 171–187. [Google Scholar] [CrossRef]
- Taillard, E.D.; Laporte, G.; Gendreau, M. Vehicle routing with multiple use of vehicles. J. Oper. Res. Soc. 1996, 47, 1065–1070. [Google Scholar] [CrossRef]
- Azi, N.; Gendreau, M.; Potvin, J.Y. An exact algorithm for a vehicle routing problem with time windows and multiple use of vehicles. Eur. J. Oper. Res. 2010, 202, 756–763. [Google Scholar] [CrossRef]
- Polacek, M.; Hartl, R.F.; Doerner, K.; Reimann, M. A variable neighborhood search for the multi depot vehicle routing problem with time windows. J. Heuristics 2004, 10, 613–627. [Google Scholar] [CrossRef]
- Vidal, T.; Crainic, T.; Gendreau, M.; Lahrichi, N.; Rei, W. A hybrid genetic algorithm for multidepot and periodic vehicle routing problems. Oper. Res. 2012, 60, 611–624. [Google Scholar] [CrossRef]
- Sevilla, F.C.; de Blas, C.S. Vehicle Routing Problem with Time Windows and Intermediate Facilities; SEIO 003 Edicions de la Universitat de Lleida; Universitat de Lleida: Lleida, Spain, 2003; pp. 3088–3096. [Google Scholar]
- Jerby, S.; Ceder, A. Optimal routing design for shuttle bus service. Transp. Res. Rec. 2006, 1971, 14–22. [Google Scholar] [CrossRef]
- Sun, Y.; Sun, X.; Li, B.; Gao, D. Joint optimization of a rail transit route and bus routes in a transit corridor. Procedia-Soc. Behav. Sci. 2013, 96, 1218–1226. [Google Scholar] [CrossRef]
- Szeto, W.; Jiang, Y. Transit route and frequency design: Bi-level modeling and hybrid artificial bee colony algorithm approach. Transp. Res. Part B 2014, 67, 235–263. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Liu, Z.; Meng, Q.; Jiang, Y. Robust optimization model of bus transit network design with stochastic travel time. J. Transp. Eng. 2013, 139, 625–634. [Google Scholar] [CrossRef]
- Chevrier, R.; Liefooghe, A.; Jourdan, L.; Dhaenens, C. Solving a dial-a-ride problem with a hybrid evolutionary multi-objective approach: Application to demand responsive transport. Appl. Soft Comput. 2012, 12, 1247–1258. [Google Scholar] [CrossRef]
- Zhu, Z.; Guo, X.; Zeng, J.; Zhang, S. Route Design Model of Feeder Bus Service for Urban Rail Transit Stations. Math. Probl. Eng. 2017, 1–6. [Google Scholar] [CrossRef]
- Lu, X.; Yu, J.; Yang, X.; Pan, S.; Zou, N. Flexible feeder transit route design to enhance service accessibility in urban area. J. Adv. Transp. 2016, 50, 507–521. [Google Scholar] [CrossRef]
- Calvete, H.I.; Galé, C.; Oliveros, M.J.; Sánchez-Valverde, B. A goal programming approach to vehicle routing problems with soft time windows. Eur. J. Oper. Res. 2007, 177, 1720–1733. [Google Scholar] [CrossRef]
- El-Sherbeny, N.A. Vehicle routing with time windows: An overview of exact, heuristic and metaheuristic methods. J. King Saud Univ.-Sci. 2010, 22, 123–131. [Google Scholar] [CrossRef]
- Repoussis, P.P.; Tarantilis, C.D. Solving the fleet size and mix vehicle routing problem with time windows via adaptive memory programming. Transp. Res. Part C Emerg. Technol. 2010, 18, 695–712. [Google Scholar] [CrossRef]
- Potvin, J.Y.; Bengio, S. The vehicle routing problem with time windows part II: Genetic search. Inf. J. Comput. 1996, 8, 165–172. [Google Scholar] [CrossRef]
- Kim, M.; Schonfeld, P. Integrating bus services with mixed fleets. Transp. Res. Part B 2013, 55, 227–244. [Google Scholar] [CrossRef]
- Carotenuto, P.; Storchi, G. Hybrid genetic algorithm to approach the DaRP in a demand responsive passenger service. IFAC Proc. Vol. 2006, 39, 315–320. [Google Scholar] [CrossRef]
- Ali, B.; Mahdi, B.; Fahime, Z. Two phase genetic algorithm for vehicle routing and scheduling problem with cross-docking and time windows considering customer satisfaction. J. Ind. Eng. Int. 2017, 17, 1–16. [Google Scholar]
- Fan, W.; Machemehl, R.B. Tabu search strategies for the public transportation network optimizations with variable transit demand. Comput.-Aided Civ. Infrastruct. Eng. 2008, 23, 502–520. [Google Scholar] [CrossRef]
- Crainic, T.G.; Malucelli, F.; Nonato, M. Meta-Heuristics for a Class of Demand-Responsive Transit Systems. Inf. J. Comput. 2005, 17, 10–24. [Google Scholar] [CrossRef]
- Fisher, M.; Jornsteen, K.; Madsen, O. Vehicle routing with time windows: Two optimization algorithms. Oper. Res. 1997, 45, 488–492. [Google Scholar] [CrossRef]
- Schulze, J.; Fahle, T. A parallel algorithm for the vehicle routing problem with time windows constraints. Ann. Oper. Res. 1999, 86, 585–607. [Google Scholar] [CrossRef]
- Wu, J.; Lederer, A. A meta-analysis of the role of environment-based voluntariness in information technology acceptance. MIS Q. 2009, 33, 419–432. [Google Scholar] [CrossRef]
- Chen, C.F.; Xu, X.; Arpan, L. Between the technology acceptance model and sustainable energy technology acceptance model: Investigating smart meter acceptance in the United States. Energy Res. Soc. Sci. 2017, 25, 93–104. [Google Scholar] [CrossRef]
- Chakri, A.; Khelif, R.; Benouaret, M.; Yang, X.S. New directional bat algorithm for continuous optimization problems. Expert Syst. Appl. 2017, 69, 159–175. [Google Scholar] [CrossRef]
- Olivas, F.; Amador-Angulo, L.; Perez, J.; Caraveo, C.; Valdez, F.; Castillo, O. Comparative Study of Type-2 Fuzzy Particle Swarm, Bee Colony and Bat Algorithms in Optimization of Fuzzy Controllers. Algorithms 2017, 10, 101. [Google Scholar] [CrossRef]
- Wang, L.; Zhong, X.; Liu, M. A novel group search optimizer for multi-objective optimization. Expert Syst. Appl. 2012, 39, 2939–2946. [Google Scholar] [CrossRef]
- Wei, M.; Chen, X.W.; Sun, B. Model and algorithm for resolving regional bus scheduling problems with fuzzy travel times. J. Intell. Fuzzy Syst. 2015, 29, 2689–2696. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indices | |
| Vehicular node (demand point, dispatch center, and urban rail station) index | |
| Vehicle index | |
| Time window | |
| Sets | |
| Set of demand points | |
| Set of vehicles | |
| Set of dispatch centers | |
| Set of rail transit stations | |
| Parameters | |
| Number of passengers at the demand point ; | |
| The hth travel time window of the demand point ; | |
| The maximum expected ride time of the demand point ; | |
| The minimum expected ride time of the demand point ; | |
| Q | Maximum capacity of the vehicle |
| Maximum length of the vehicle | |
| Minimum travel time of feeder bus route | |
| Distance from the vehicular node to the vehicular node ; | |
| Travel time from the vehicular node to the vehicular node ; | |
| The time of vehicle k arriving the rail transit stations | |
| The time of vehicle k arriving the demand point ; | |
| Number of passengers at customer point assigned to vehicle k; | |
| A function to calculate the passenger satisfaction at demand point based on his/her ride time ; , | |
| Operational cost yuan/km | |
| Satisfaction cost yuan/person | |
| A very large fixed value | |
| Decision Variables | |
| Whether the vehicular node precedes the vehicular node on the vehicle k, or not; , | |
| Whether the vehicular node is covered by the vehicle k, or not; , | |
| An auxiliary (real) variable for sub-tour elimination constraint in vehicle k; | |
| No. | ||||
|---|---|---|---|---|
| C1 | [8:10–8:20], [8:00–8:33] | 5 | 15 | 3 |
| C2 | [8:00–8:10], [8:20–8:30] | 10 | 20 | 1 |
| C3 | [8:10–8:20], [10:05–10:15] | 5 | 15 | 1 |
| C4 | 8:15–8:25 | 5 | 10 | 2 |
| C5 | 8:15–8:25 | 5 | 20 | 2 |
| C6 | 8:20–8:30 | 10 | 20 | 3 |
| C7 | [8:05–8:15], [8:20–8:30] | 10 | 20 | 4 |
| C8 | 8:08–8:18 | 10 | 20 | 1 |
| C9 | 8:10–8:20 | 5 | 15 | 2 |
| C10 | [8:05–8:15], [8:10–8:20], [8:35–8:45] | 5 | 15 | 2 |
| C11 | 8:20–8:30 | 5 | 15 | 4 |
| C12 | [8:10–8:20], [8:25–8:35] | 5 | 20 | 1 |
| C13 | 8:00–8:10 | 5 | 20 | 3 |
| C14 | 8:10–8:20 | 5 | 20 | 1 |
| C15 | 8:20–8:30 | 5 | 20 | 12 |
| Demand Point | Boarding Time | Ride Time | Satisfaction | Vehicle |
|---|---|---|---|---|
| C5 | 8:17 | 10.2 | 0.65 | V1 |
| C6 | 8:18 | 9.7 | 1 | |
| C7 | 8:20 | 7.3 | 1 | |
| C8 | 8:21 | 6.2 | 1 | |
| C15 | 8:25 | 2.7 | 1 | |
| C10 | 8:27 | 2.3 | 1 | V2 |
| C11 | 8:22 | 7.3 | 0.77 | |
| C12 | 8:25 | 3.9 | 1 | |
| C14 | 8:20 | 9.6 | 0.69 | |
| C1 | 8:13 | 2.4 | 1 | V3 |
| C2 | 8:10 | 5.7 | 1 | |
| C3 | 8:12 | 3.4 | 1 | |
| C4 | 8:11 | 4.8 | 1 | |
| C9 | 8:15 | 1.1 | 1 | |
| C13 | 8:05 | 10.5 | 0.63 |
| Vehicle | The Sequence of Demand Points Visited by Vehicle | Travel Distance (km) | Travel Time (min) | Number of Passengers |
|---|---|---|---|---|
| V1 | D1(8:15)–C5(8:17)–C6(8:18)–C7(8:20)–C8(8:21)–C15(8:25)–M (8:27) | 3.1 | 12.2 | 12 |
| V2 | D4(8:17)–C14(8:20)–C11(8:22)–C12(8:25)–C10(8:27)–M(6:29) | 3.1 | 12.5 | 8 |
| V3 | D4(8:03)–C13(8:05)–C2(8:10)–C4(8:11)–C3(8:12)–C1(8:13)–C9(8:15)–M(8:16) | 3.0 | 12.1 | 12 |
| Scenario | Objective (yuan) | Total Satisfaction | Total Mileage (km) | Total Time (min) |
|---|---|---|---|---|
| 3 Vehicles | −36.4 | 96.4 | 9.2 | 36.8 |
| 4 Vehicles | −52.1 | 130.9 | 12.1 | 49.4 |
| 5 Vehicles | −68.4 | 157.4 | 13.7 | 57.6 |
| Number of Demand Points | Cplex | Improved BA | Standard BA | Standard GSO | ||||
|---|---|---|---|---|---|---|---|---|
| Best Solution (yuan) | Probability | Best Solution (yuan) | Probability | Best Solution (yuan) | Probability | Best Solution (yuan) | Probability | |
| 15 | −36.4 | 100% | −36.4 | 86.7% | −36.4 | 74.7% | −36.4 | 73.4% |
| 30 | −41.8 | 100% | −40.6 | 77.1% | −38.8 | 65.2% | −37.7 | 62.8% |
| 60 | −76.5 | 100% | −69.9 | 62.3% | −63.3 | 51.8% | −61.5 | 47.6% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Wei, M.; Zhu, S. Optimal Design of Demand-Responsive Feeder Transit Services with Passengers’ Multiple Time Windows and Satisfaction. Future Internet 2018, 10, 30. https://doi.org/10.3390/fi10030030
Sun B, Wei M, Zhu S. Optimal Design of Demand-Responsive Feeder Transit Services with Passengers’ Multiple Time Windows and Satisfaction. Future Internet. 2018; 10(3):30. https://doi.org/10.3390/fi10030030
Chicago/Turabian StyleSun, Bo, Ming Wei, and Senlai Zhu. 2018. "Optimal Design of Demand-Responsive Feeder Transit Services with Passengers’ Multiple Time Windows and Satisfaction" Future Internet 10, no. 3: 30. https://doi.org/10.3390/fi10030030
APA StyleSun, B., Wei, M., & Zhu, S. (2018). Optimal Design of Demand-Responsive Feeder Transit Services with Passengers’ Multiple Time Windows and Satisfaction. Future Internet, 10(3), 30. https://doi.org/10.3390/fi10030030