
Optimizing Hybrid V2X Communication: An Intelligent Technology Selection Algorithm Using 5G, C-V2X PC5 and DSRC




Abstract
:
1. Introduction
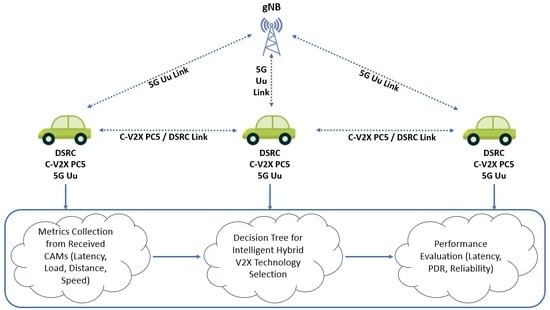
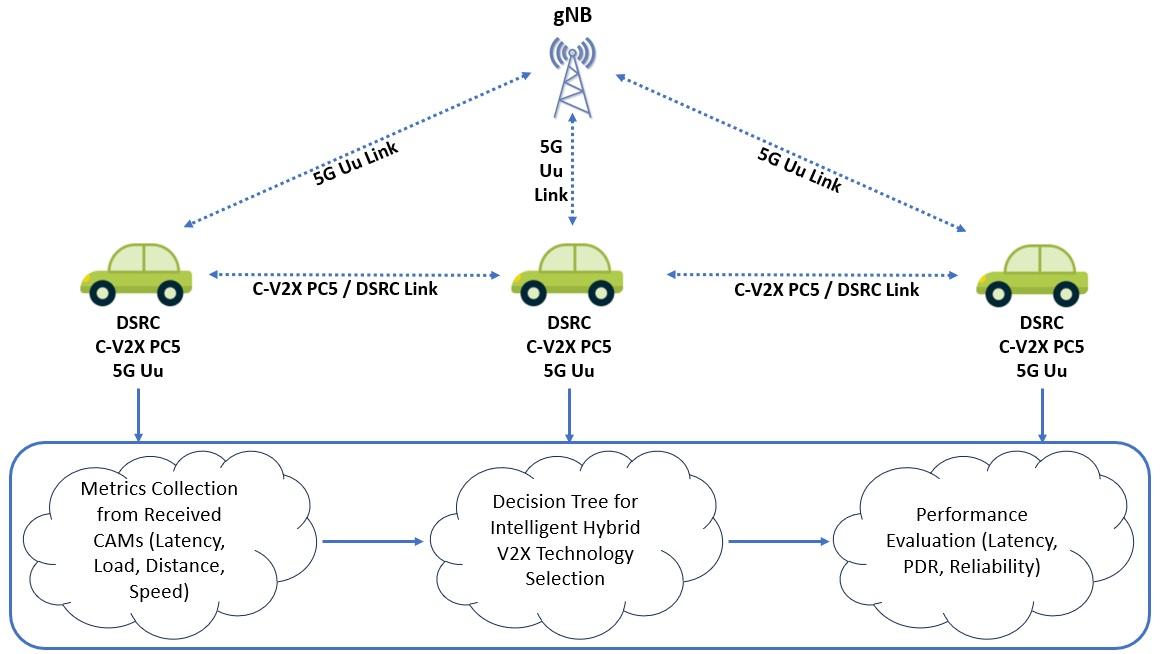
- This is the first study within the hybrid V2X domain, wherein three technologies are taken into consideration for hybrid V2X communications. Specifically, two short-range technologies, namely C-V2X PC5 and DSRC, along with the long-range 5G Uu are included. This comprehensive approach offers increased flexibility in the selection of the most suitable V2X technology.
- A detailed intelligent hybrid V2X technology selection algorithm has been introduced to optimize the selection of V2X technology and adapting the C-ITS message generation rate. This algorithm takes into account various factors, including latencies associated with CAM receptions from different technologies, the speed of the V2X node, proximity to the neighboring V2X nodes, the type of C-ITS message, and the prevailing traffic density.
- The hybrid V2X technology selection algorithm under consideration also incorporates a scenario involving the concurrent transmission of CAM and DENM. Furthermore, the adjustments necessary for intelligent decision-making in this context are thoroughly examined and discussed.
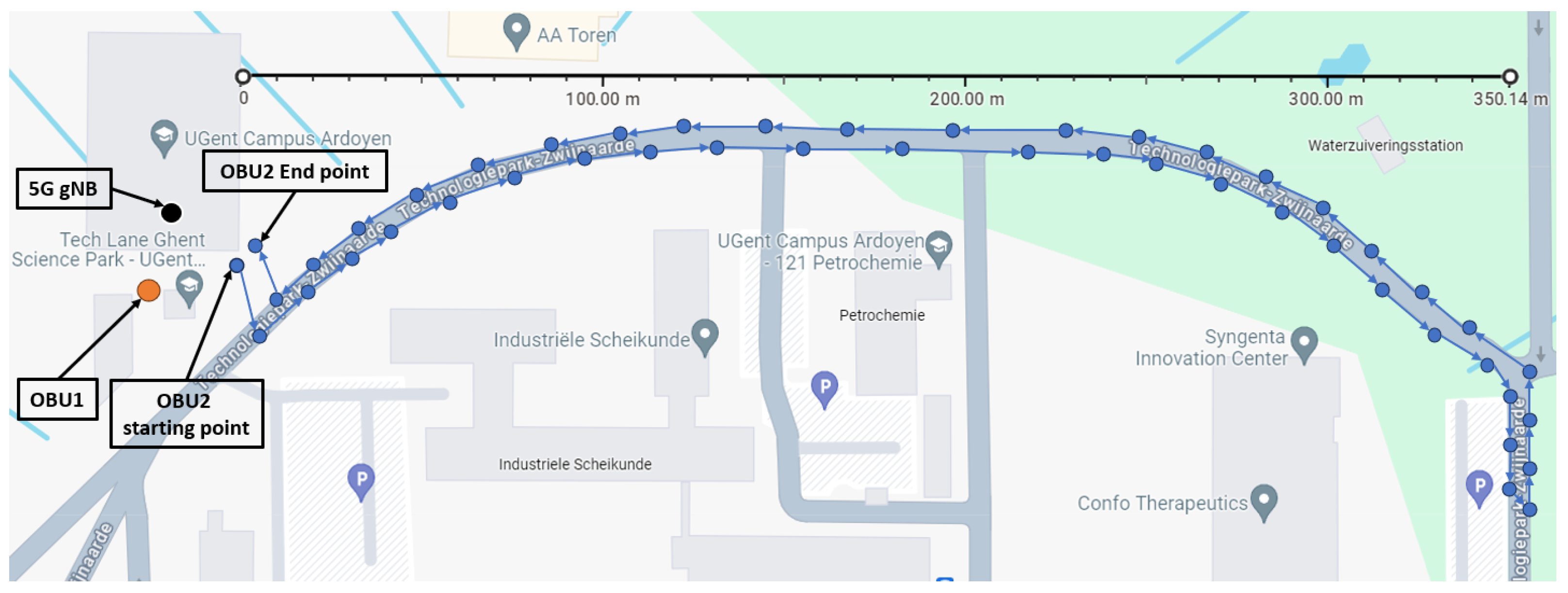
- This study entails an experimentally driven investigation conducted in real-world conditions on a road, incorporating authentic environmental limitations and concurrent transmissions of CAM and DENM. The aim is to validate the real-time functionality of the proposed hybrid V2X technology selection algorithm.
2. Related Work
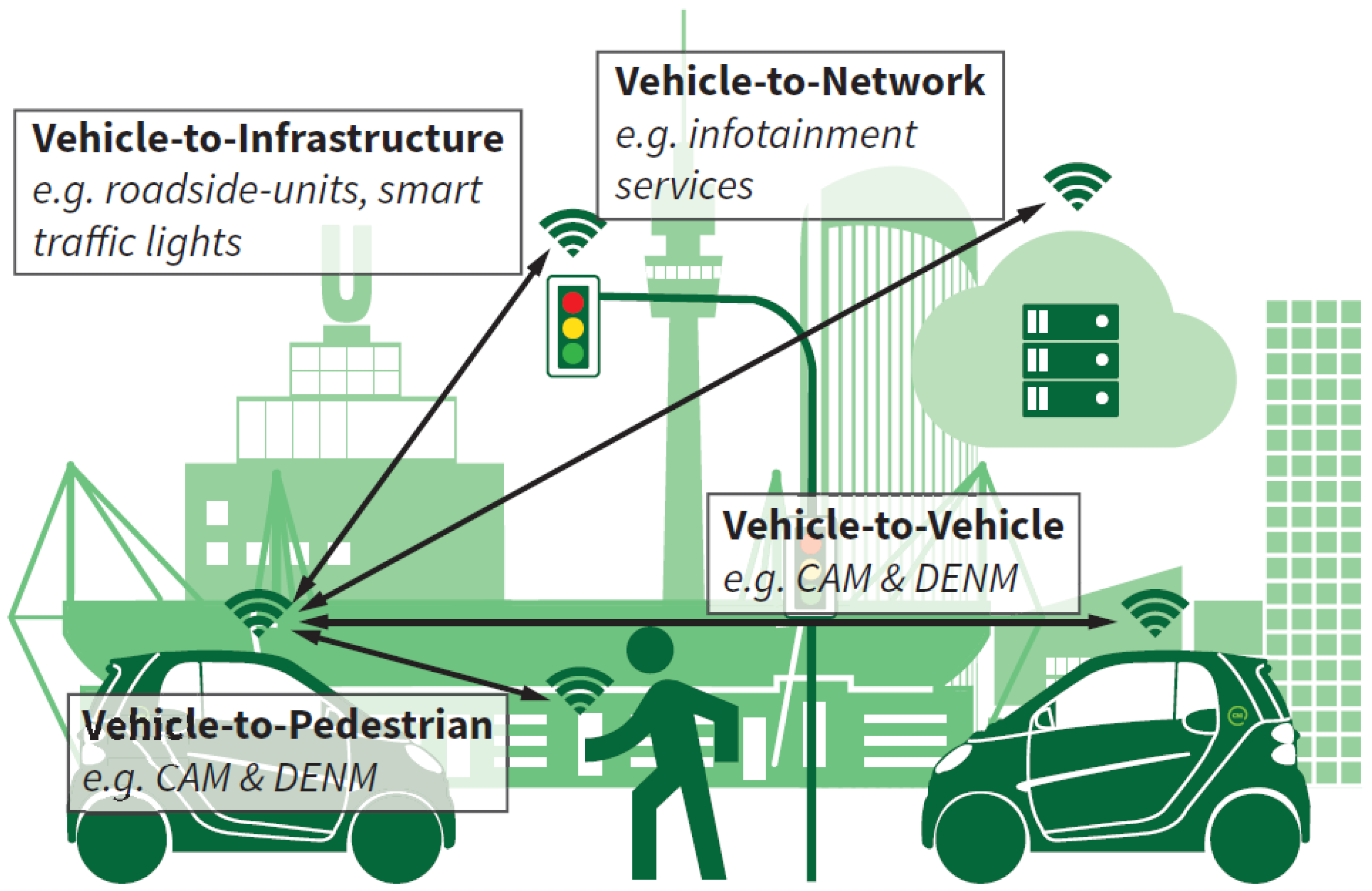
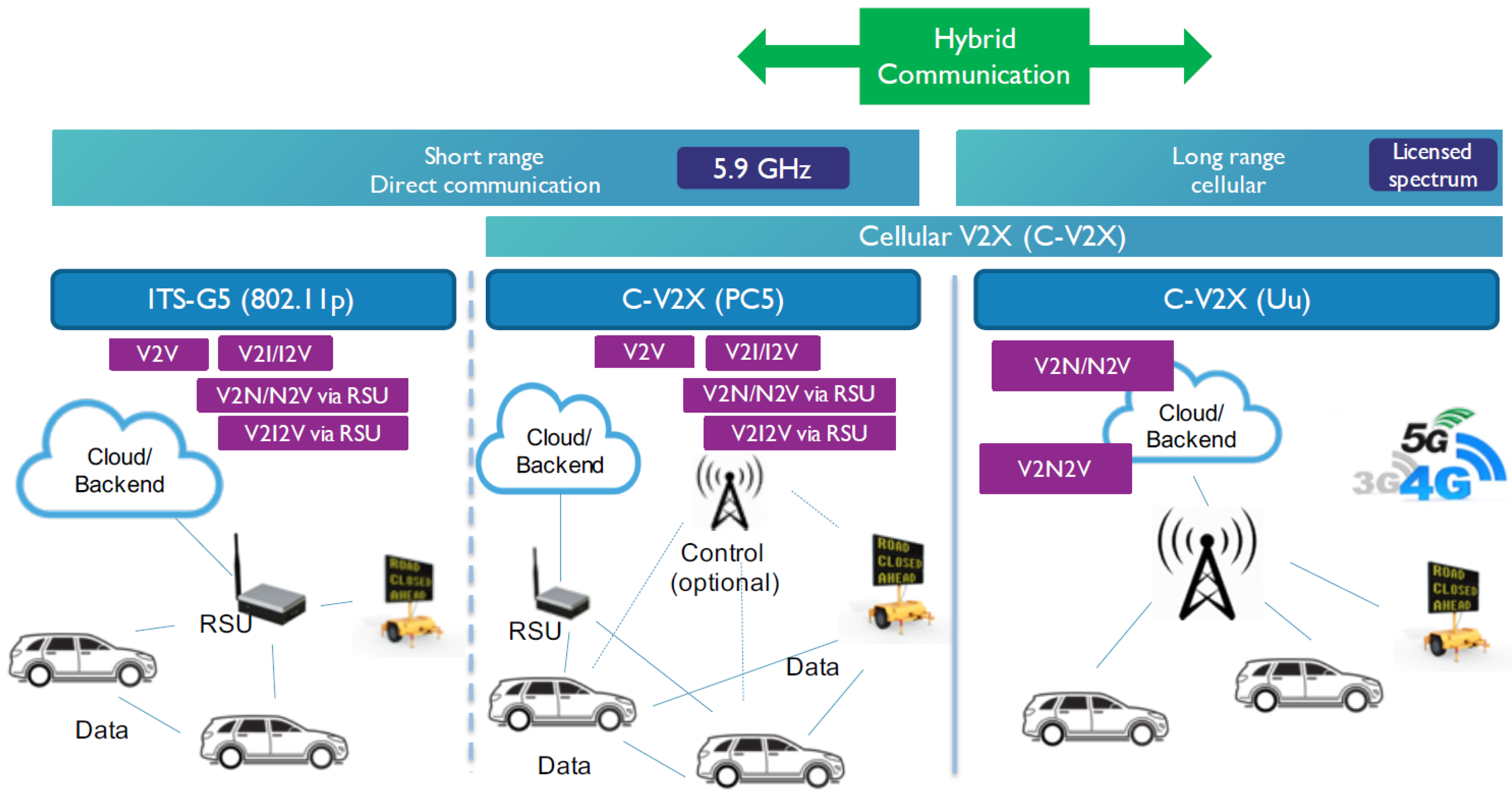
3. Overview of Short-Range and Long-Range Communication
3.1. Short-Range Direct V2X Communication
3.2. Long-Range V2X Communication
3.3. NR-V2X Use Cases
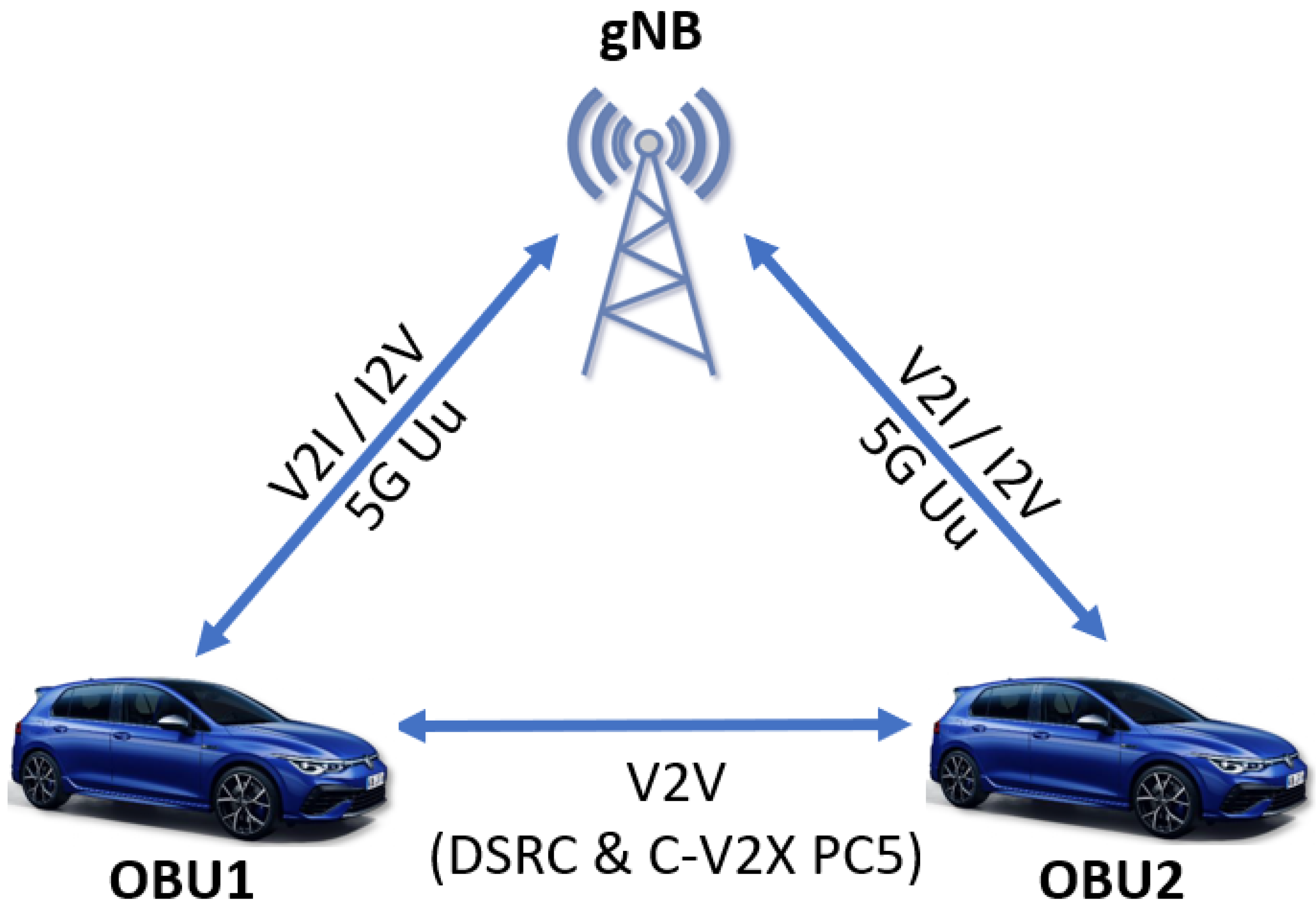
4. System Model and Problem Statement
- Each V2X node is equipped with DSRC, C-V2X PC5, and 5G Uu capabilities.
- Each V2X node sends periodic CAMs.
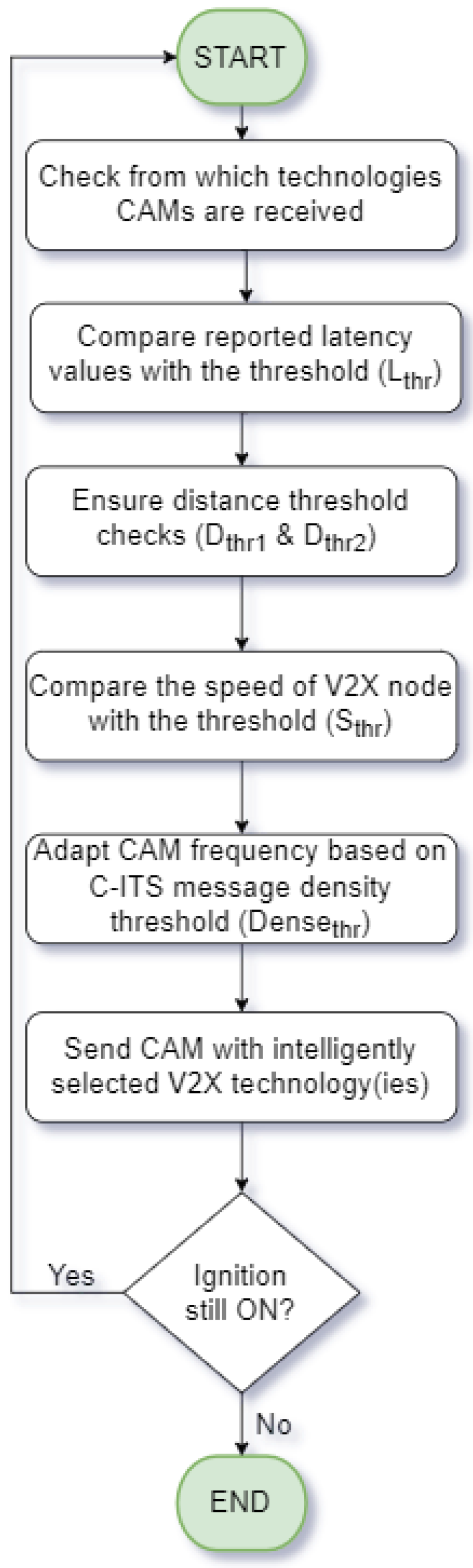
5. Proposed Hybrid V2X Technology Selection Algorithm
5.1. Selection Criteria
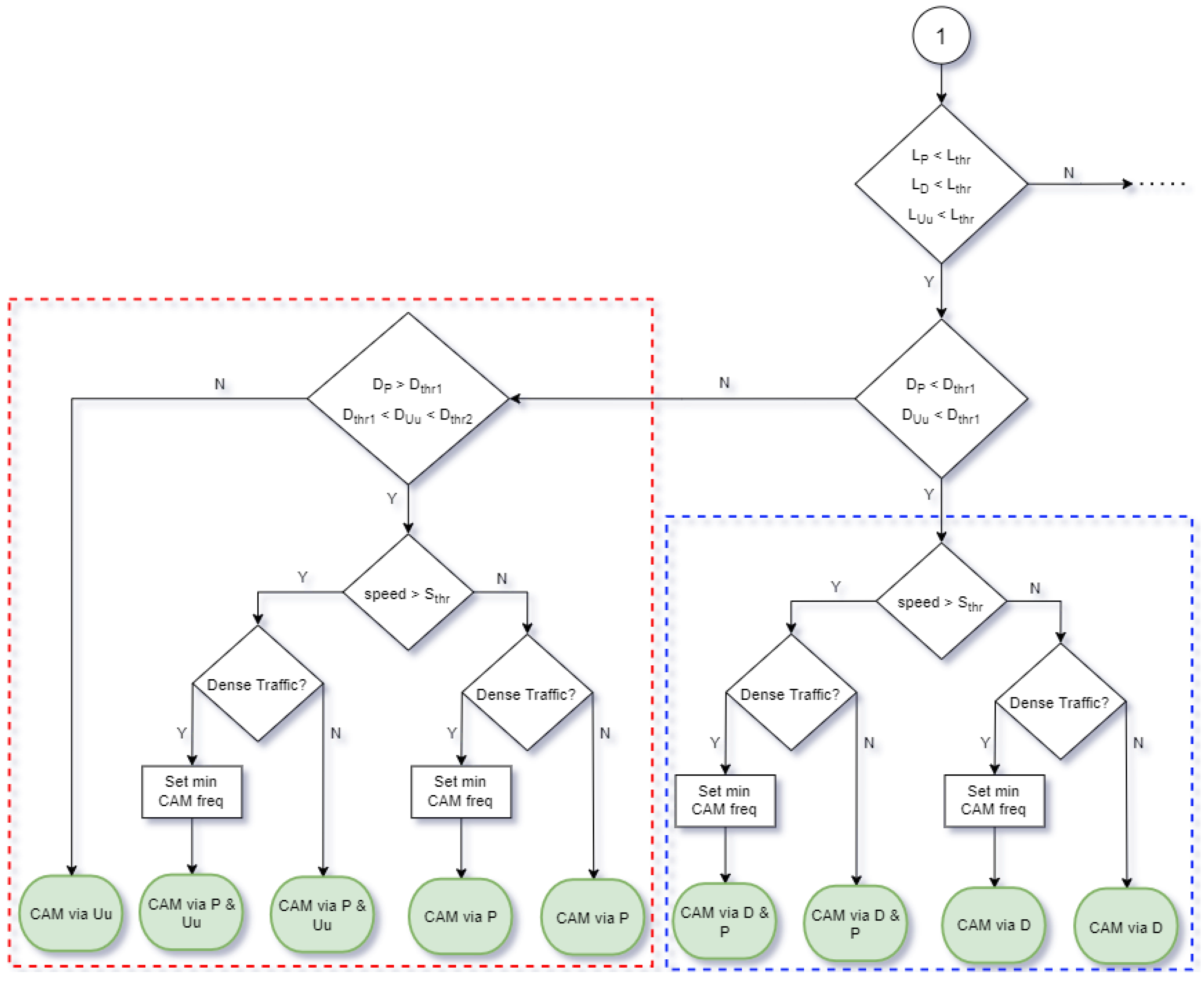
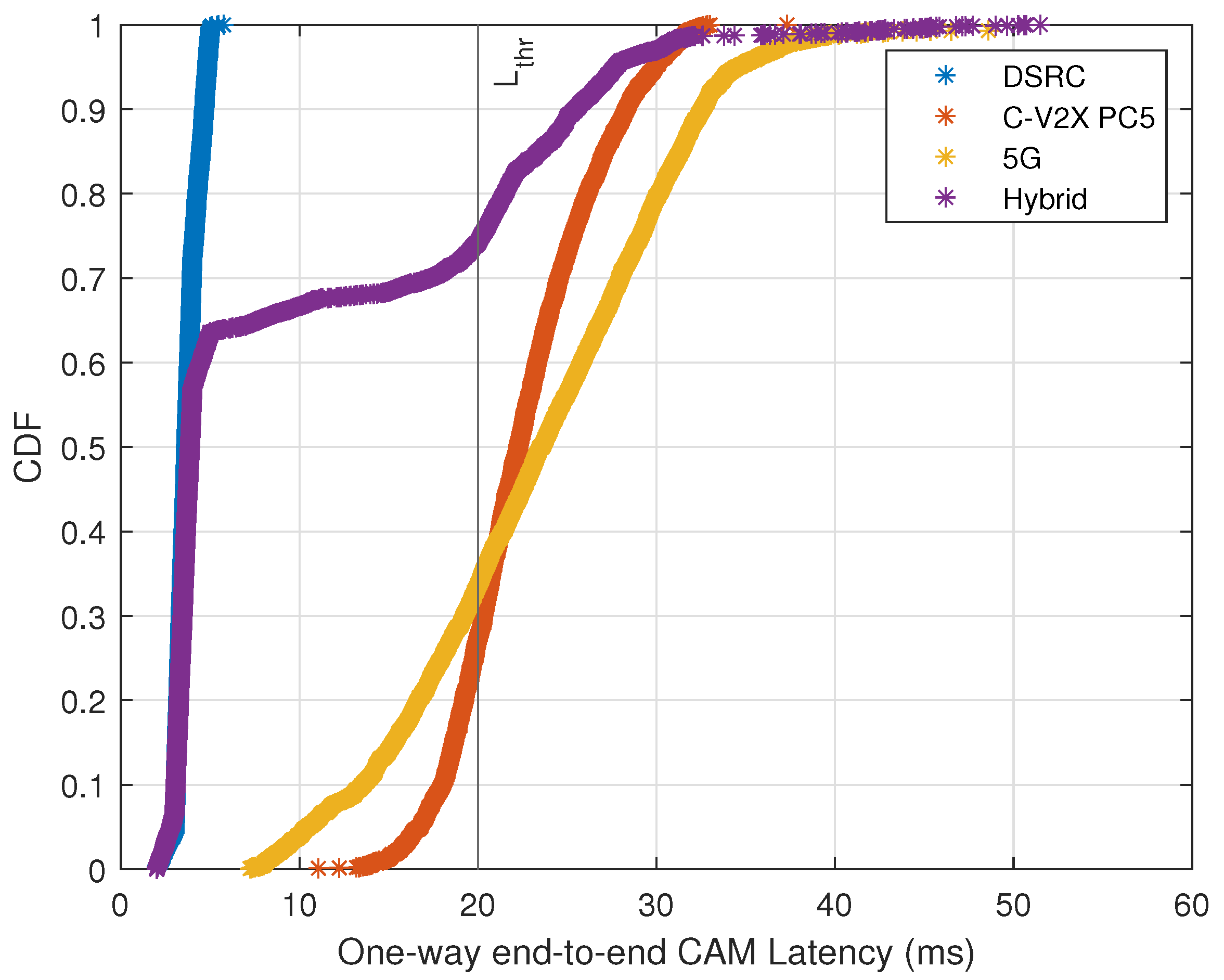
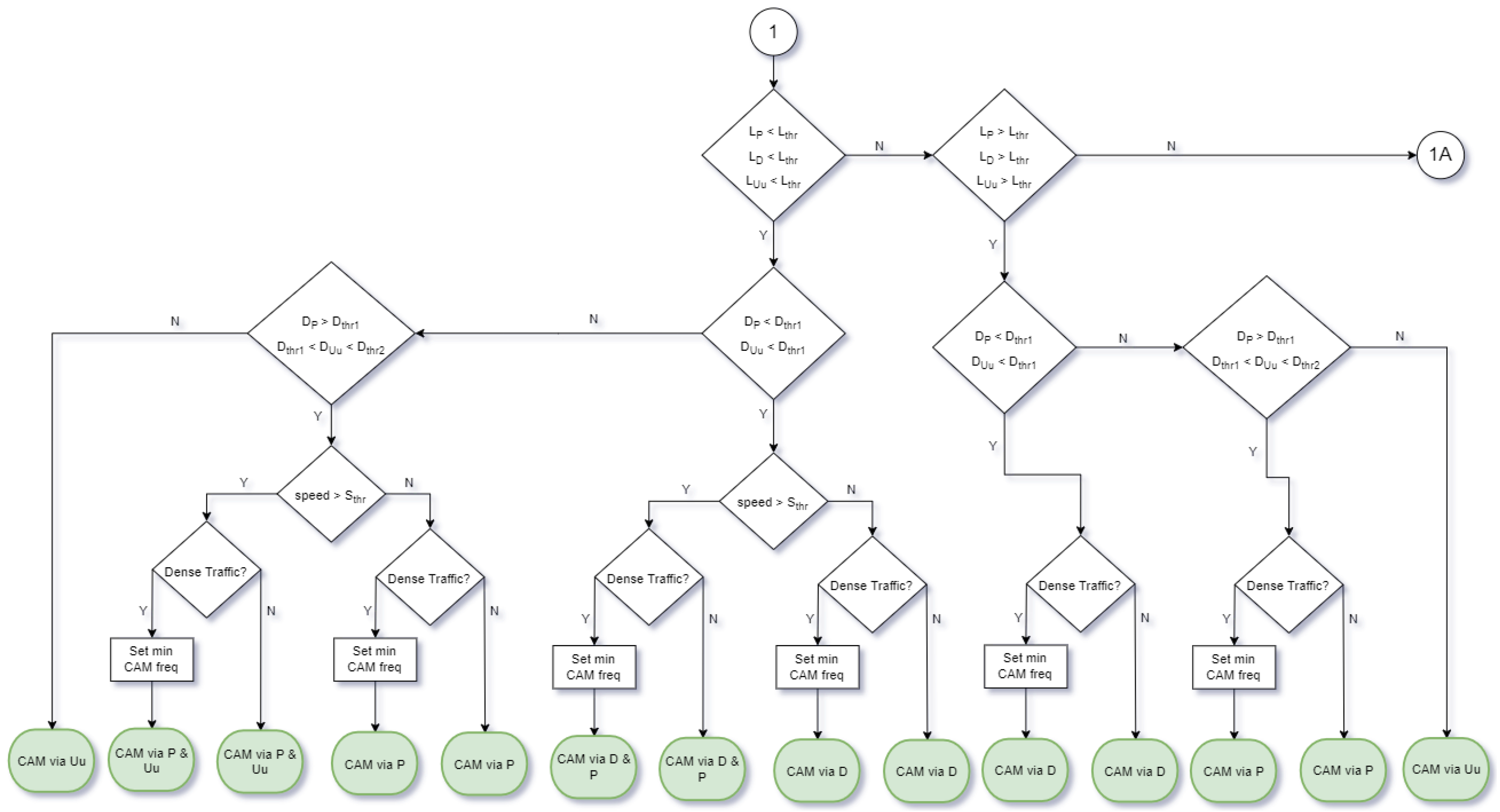
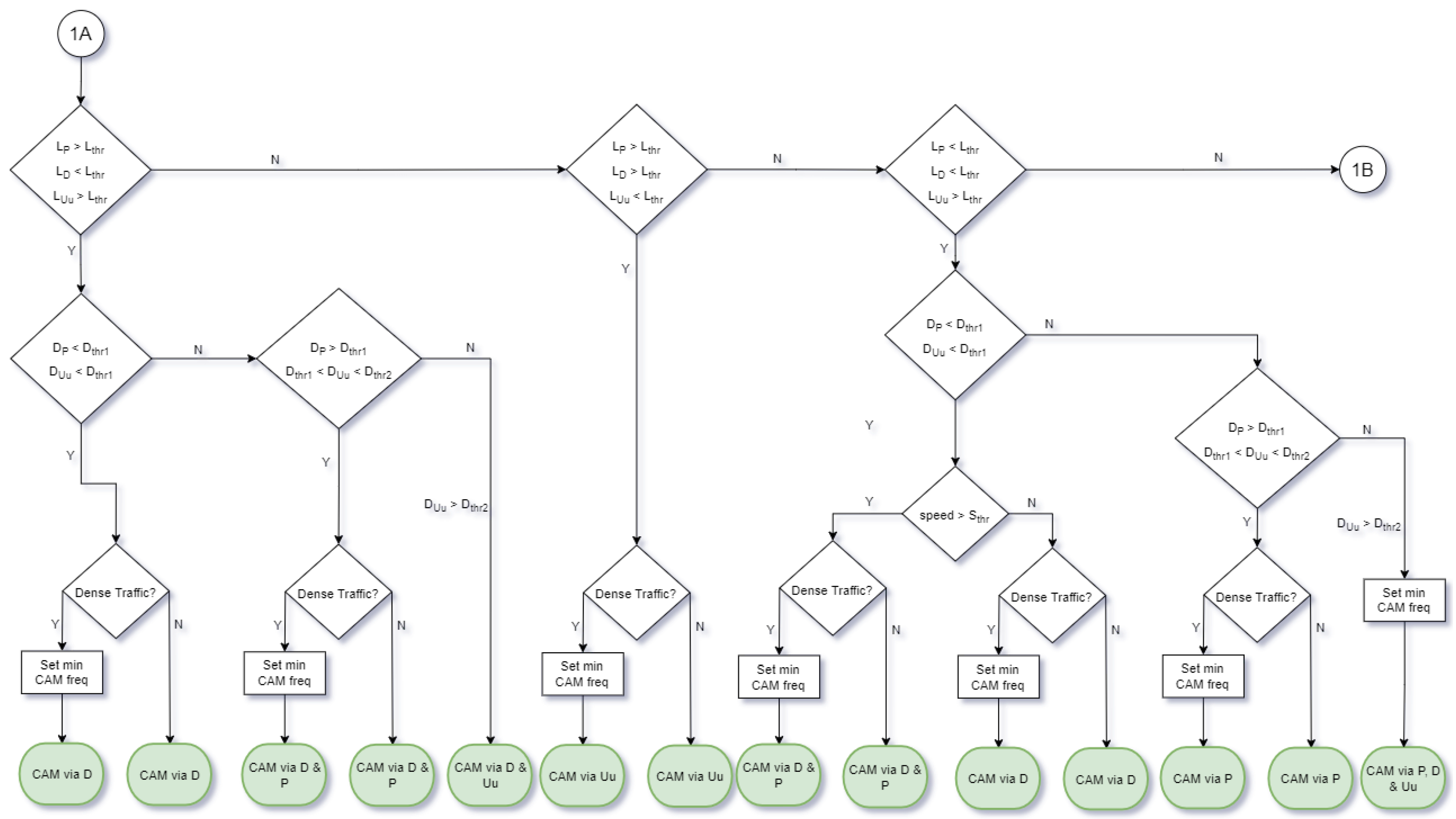
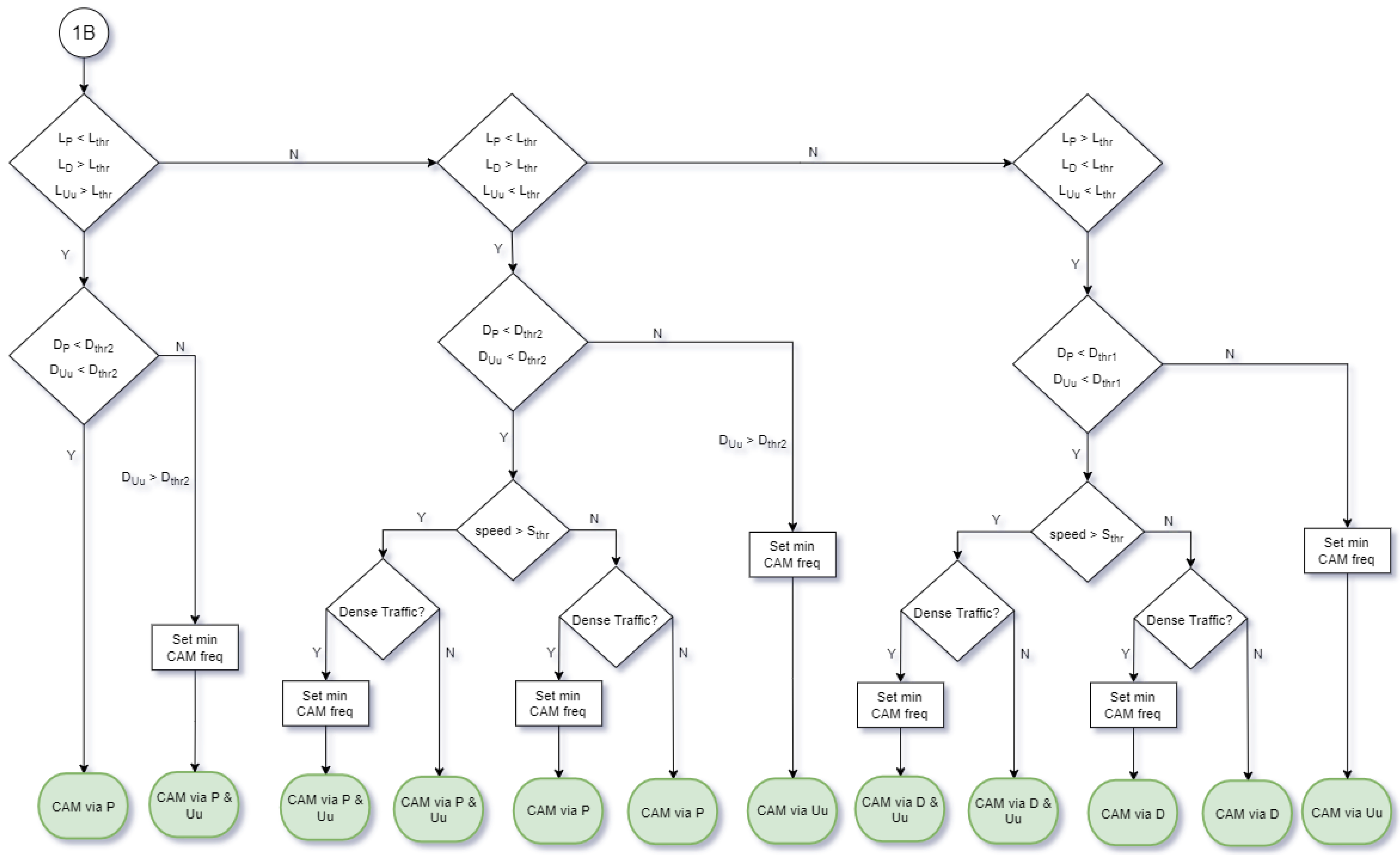
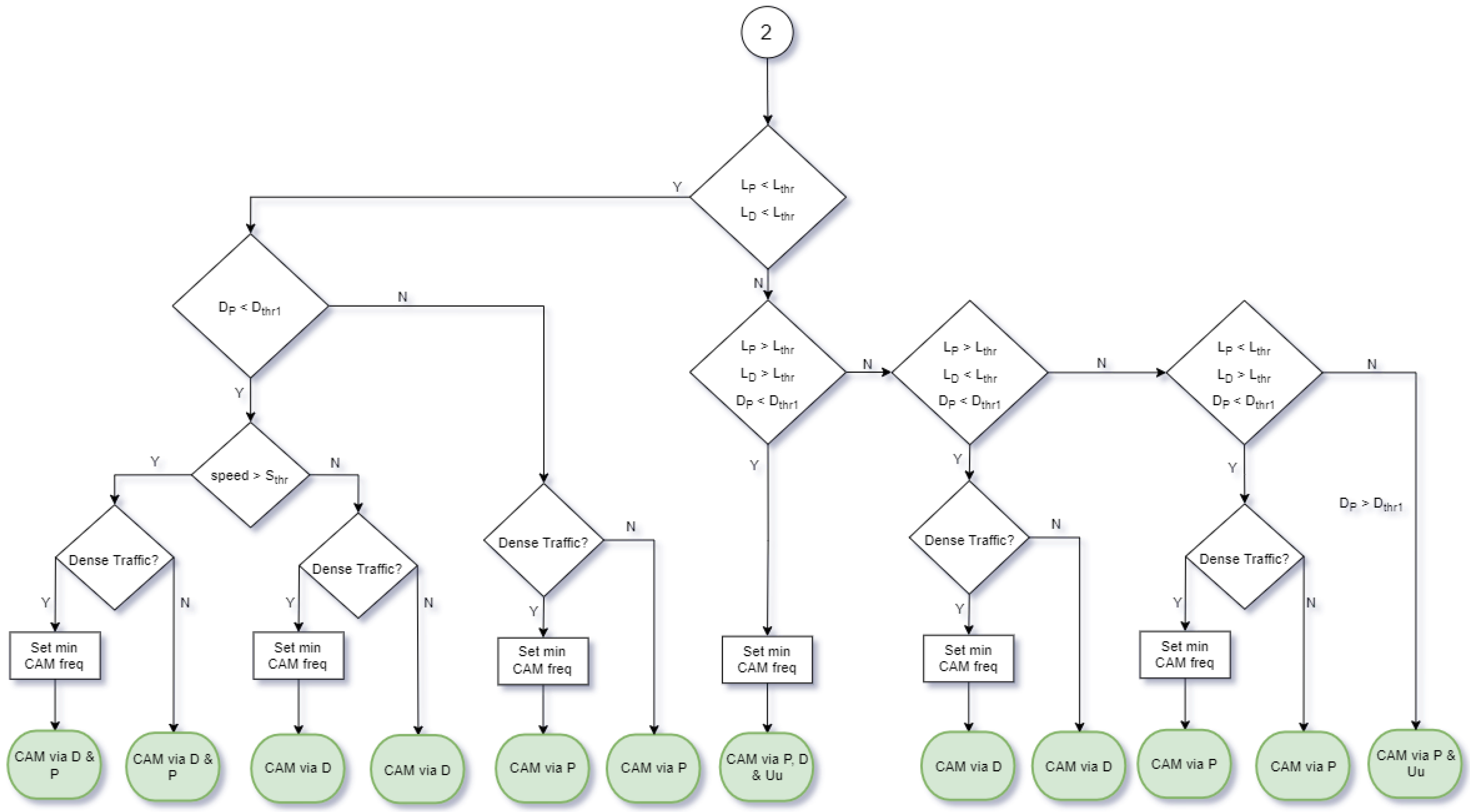
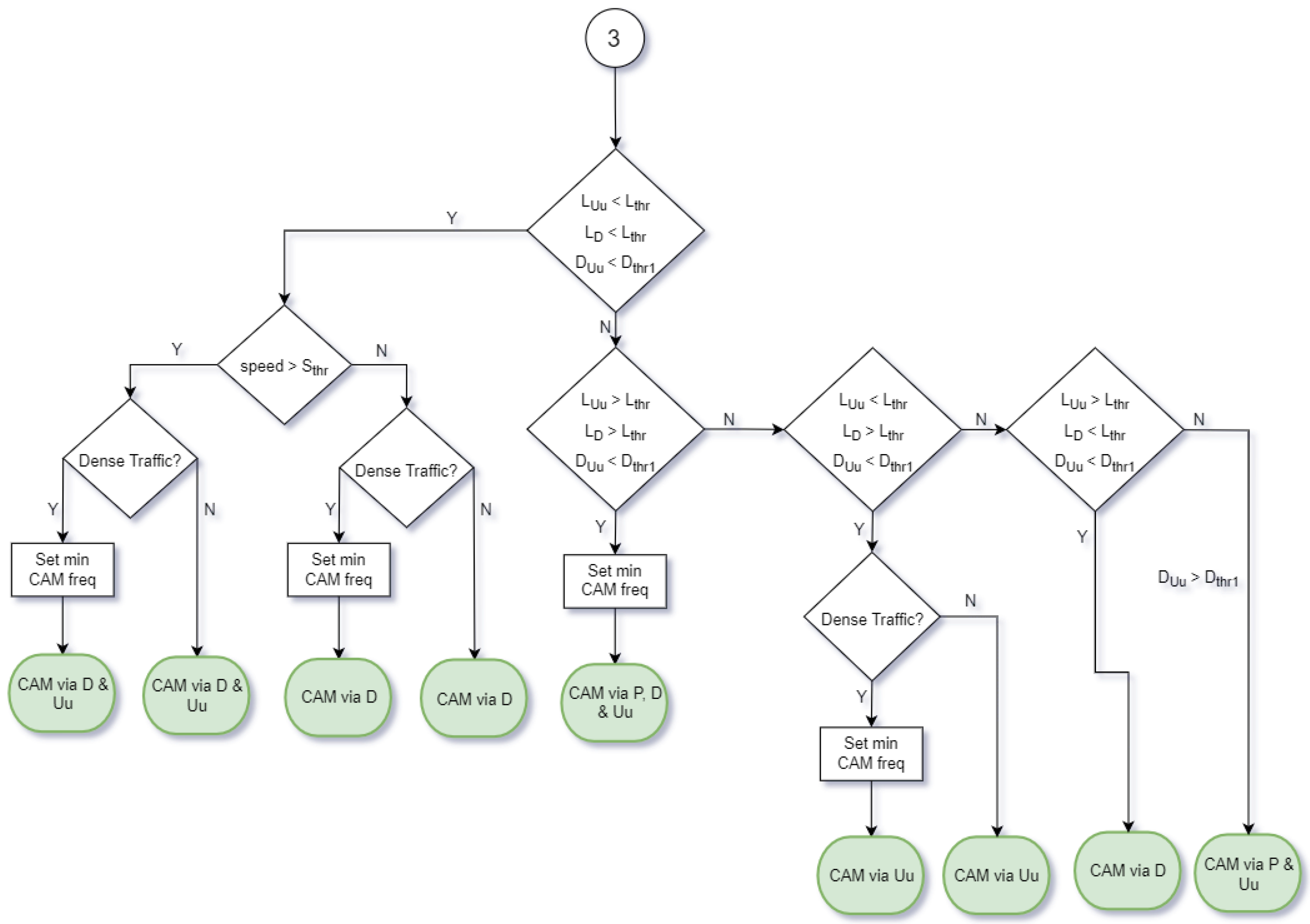
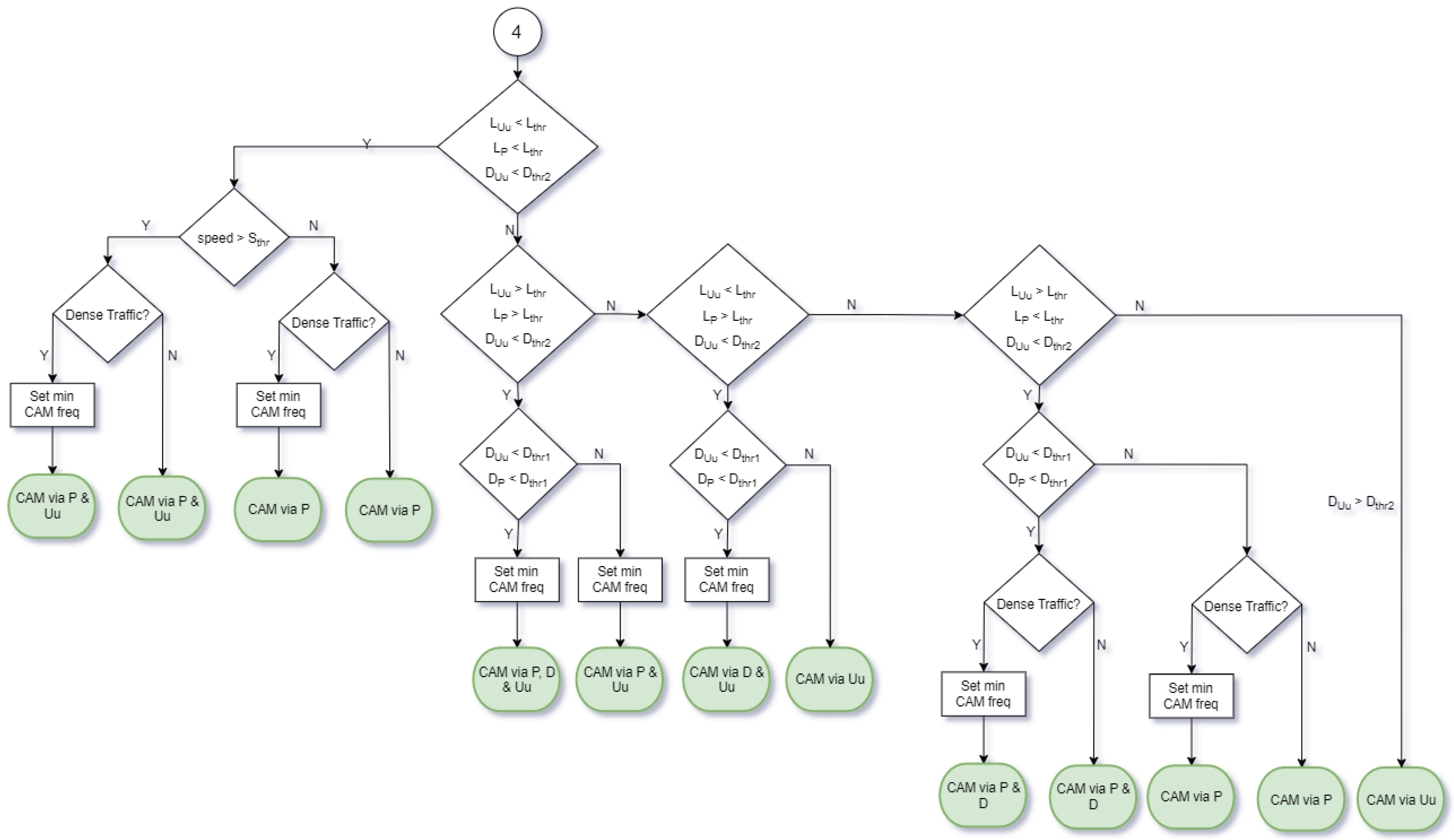
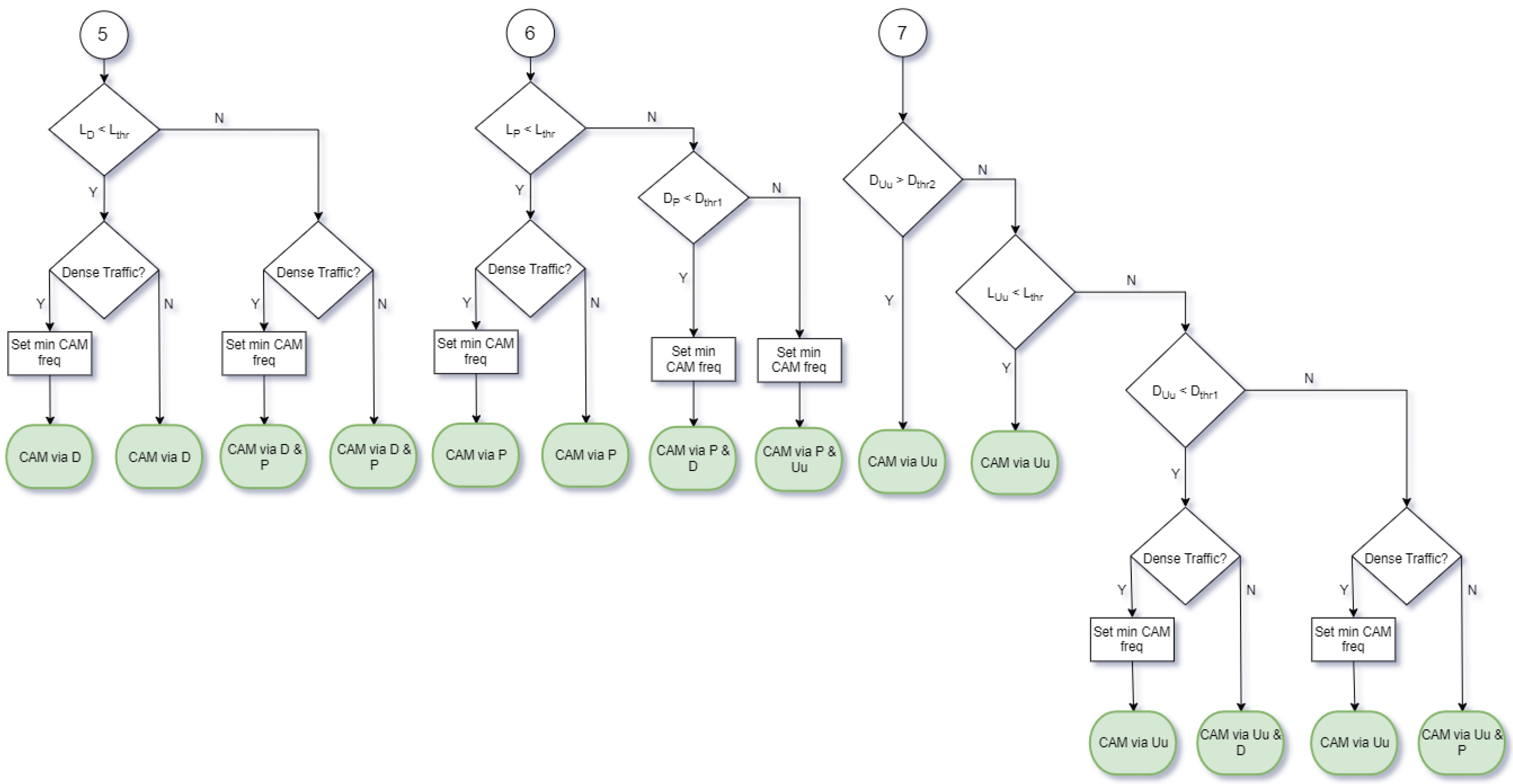
- One-way end-to-end CAM latency: Elapsed time from the instant a data packet is generated at the source application to the instant it is received by the destination application, calculated using the timestamps i.e., CAM creation time and CAM reception time. This in further divided into three parameters, one for each of the three considered technologies i.e., DSRC, PC5 and 5G Uu, and denoted as , and , respectively. Each of them represents an average value based on all CAM receptions from a specific technology during the time sliding window.
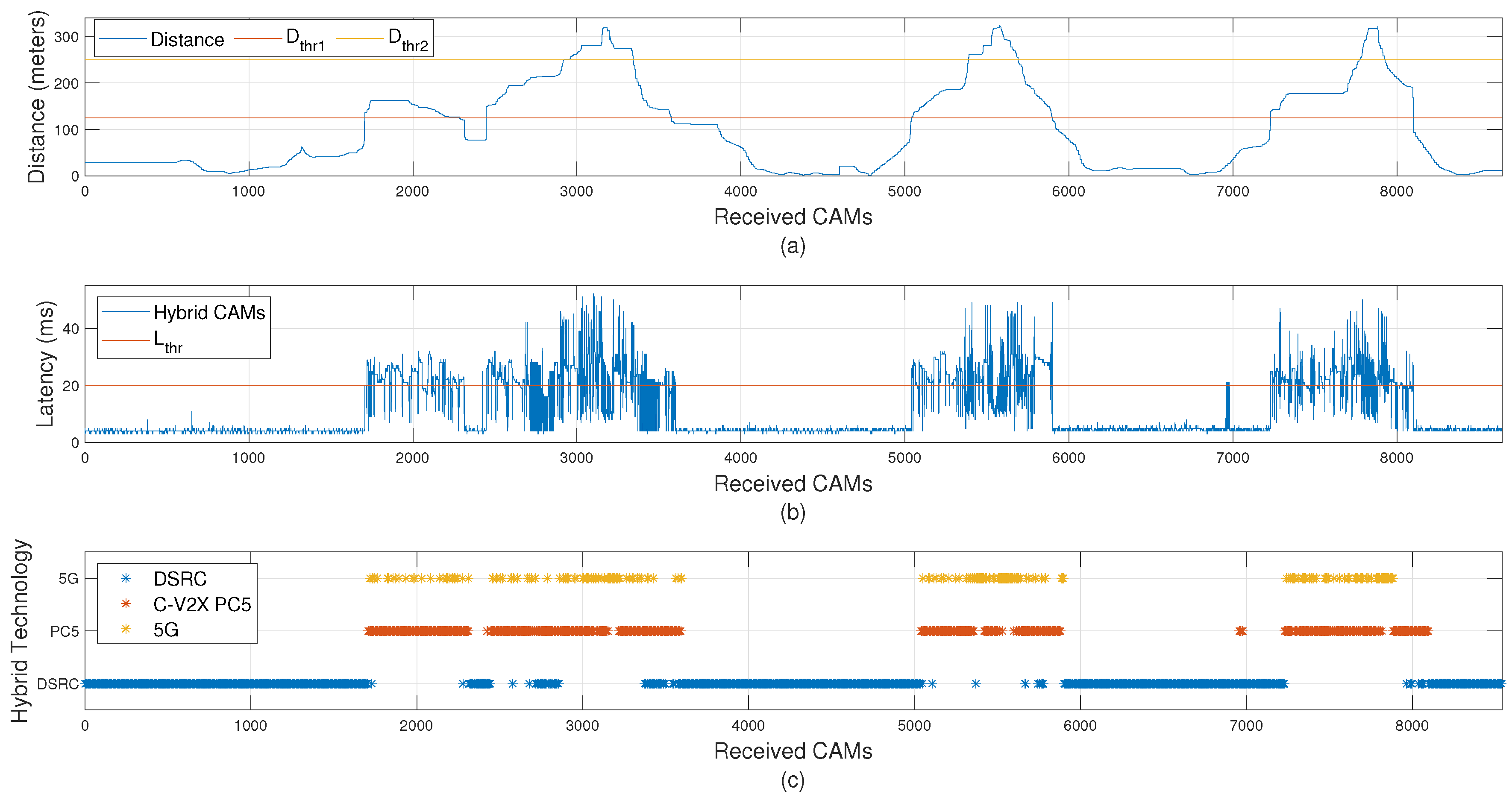
- Inter-vehicular distance: Distance between V2X nodes, calculated using the longitude and latitude information from the received CAM and the current longitude and latitude of the V2X node where intelligent decision is to be made. This is further divided into three parameters, one for each of the three considered technologies and denoted as , and for DSRC, C-V2X PC5 and 5G Uu, respectively. Each of them represents an average value based on all CAM receptions from a specific technology during the time sliding window.
- CAM density: Number of CAMs received via DSRC, C-V2X PC5 and 5G Uu during the time sliding window, denoted as , and , respectively.
- C-ITS message type: CAM only or CAM with DENM. This is a crucial parameter as efficient resource allocation and technology selection is needed to avoid compromising the DENM transmission performance.
- Speed: Speed (S) in km/h of the V2X node where the intelligent decision is to be made. Speed is compared with a speed threshold, , to decide if the V2X node is moving fast, with an aim to preempt possibly rapidly changing traffic dynamics.
5.2. KPIs
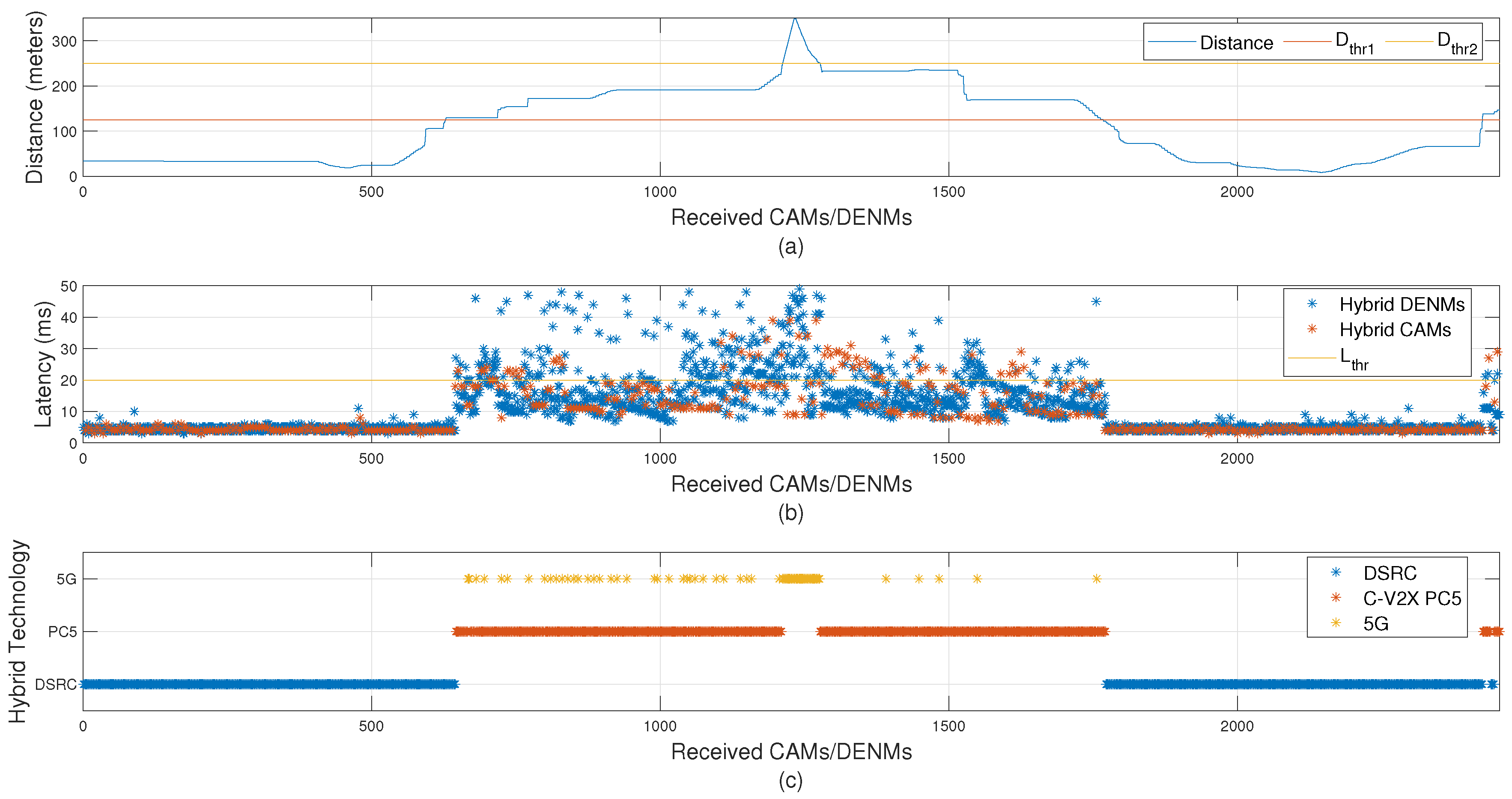
- One-way end-to-end hybrid CAM latency: This is the one-way end-to-end latency of the hybrid CAMs i.e., intelligently sent CAMs. This parameter gives an overview of the performance improvement with the use of intelligent hybrid V2X technology selection algorithm.
- Packet Delivery Rate (PDR): It is measured as the ratio of the number of CAMs delivered to the total number of CAMs sent from source node to the destination node in the network.
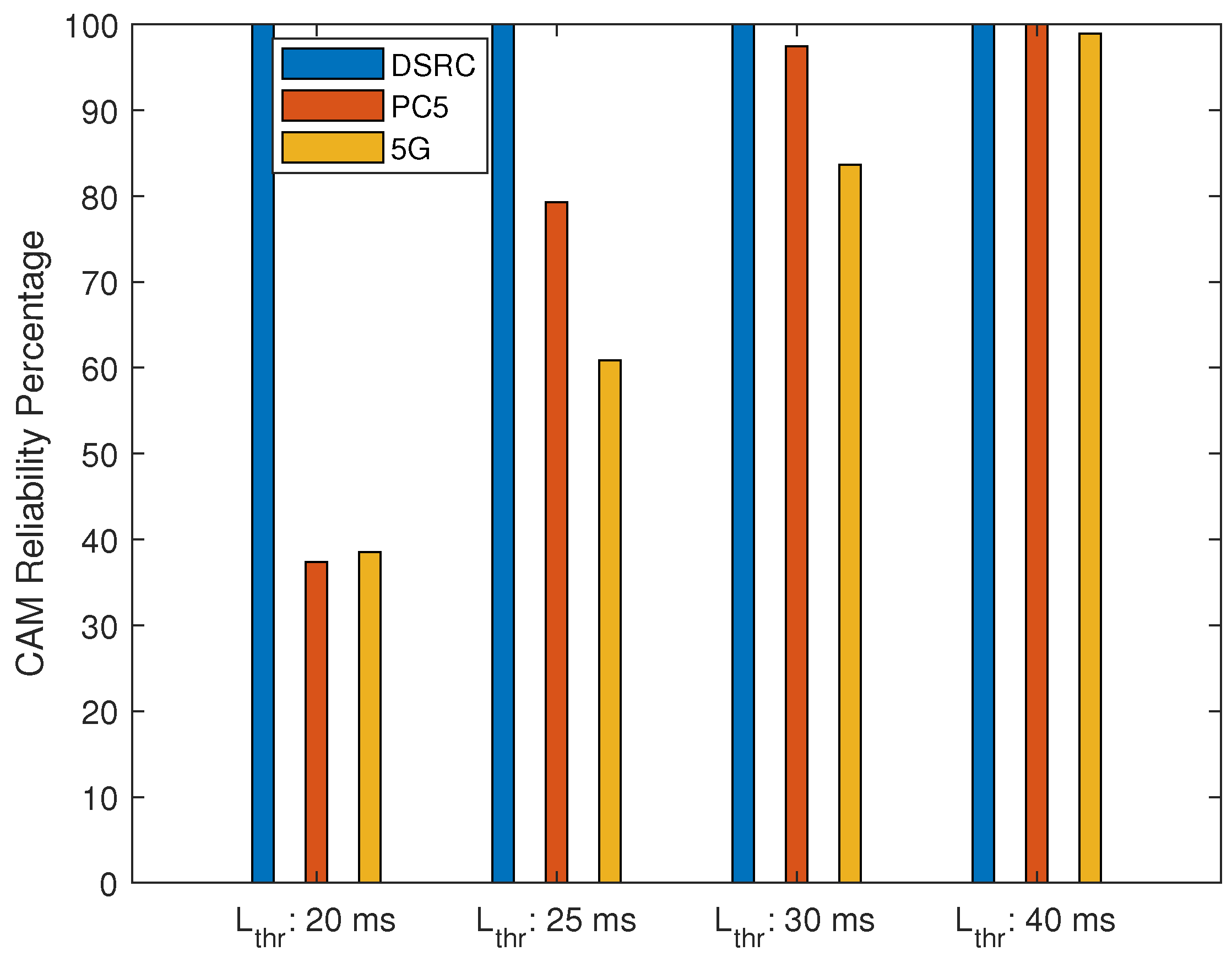
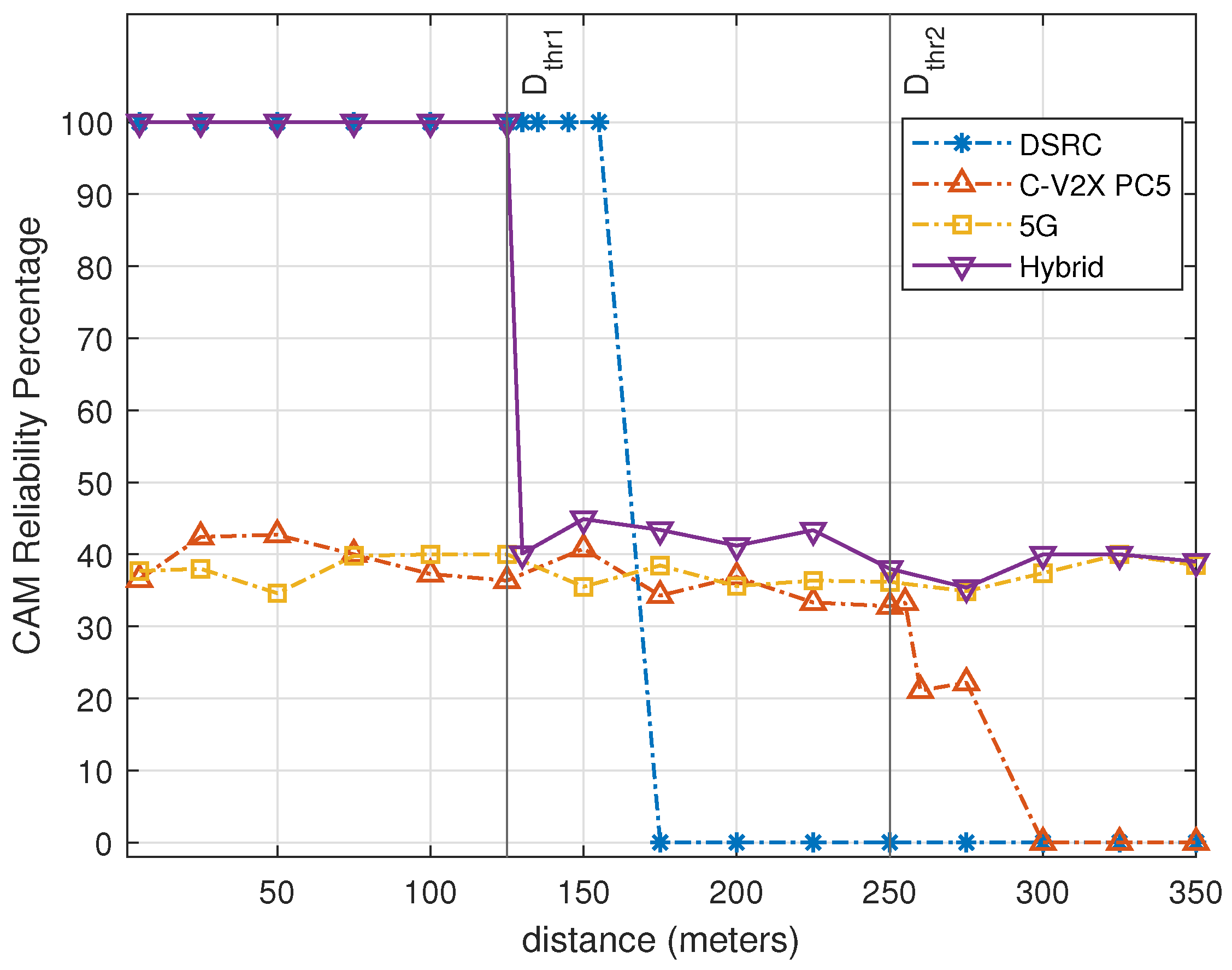
- Reliability: Among the received CAMs, reliability refers to the proportion of CAMs that exhibit a one-way end-to-end latency below the specified latency threshold, represented as .
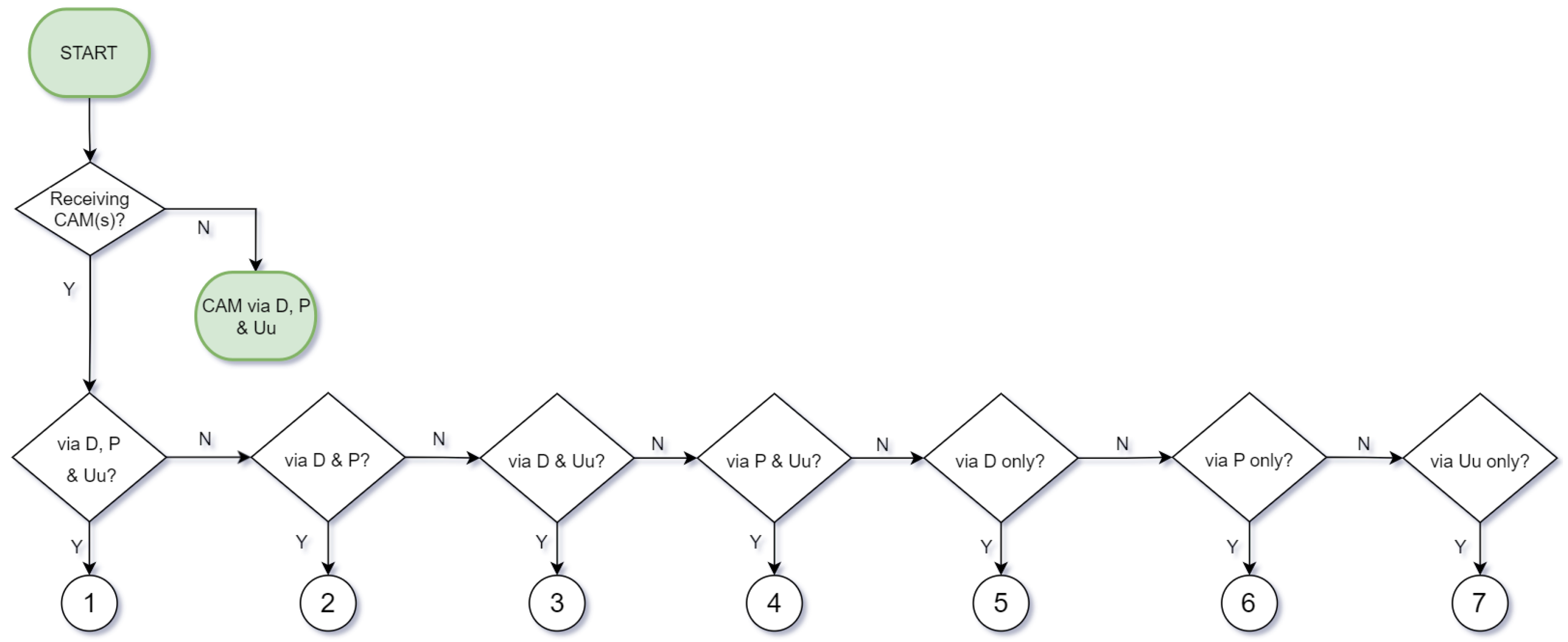
5.3. Intelligent Hybrid V2X Technology Selection Algorithm
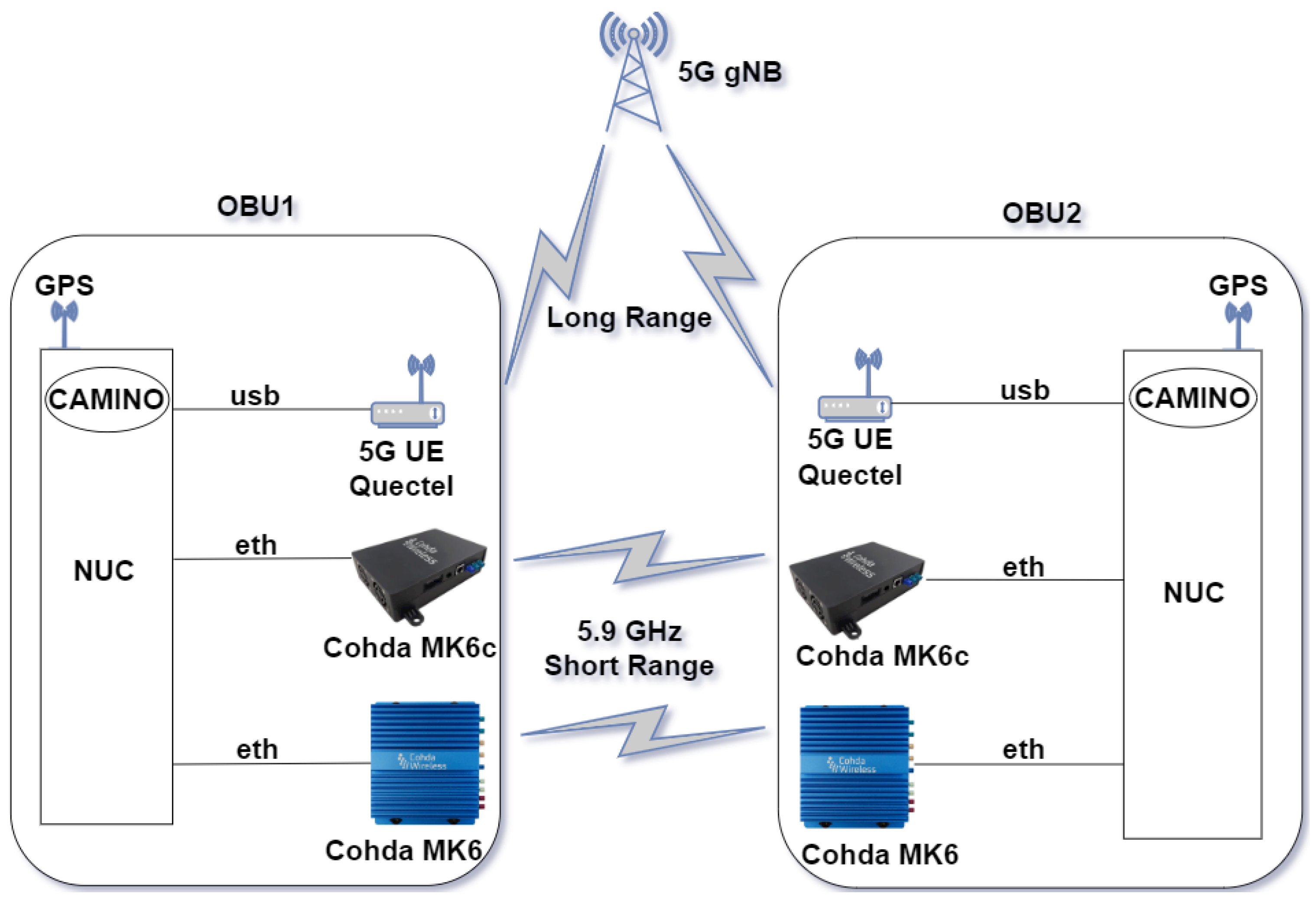
6. V2X Testbed Setup and Algorithm Implementation
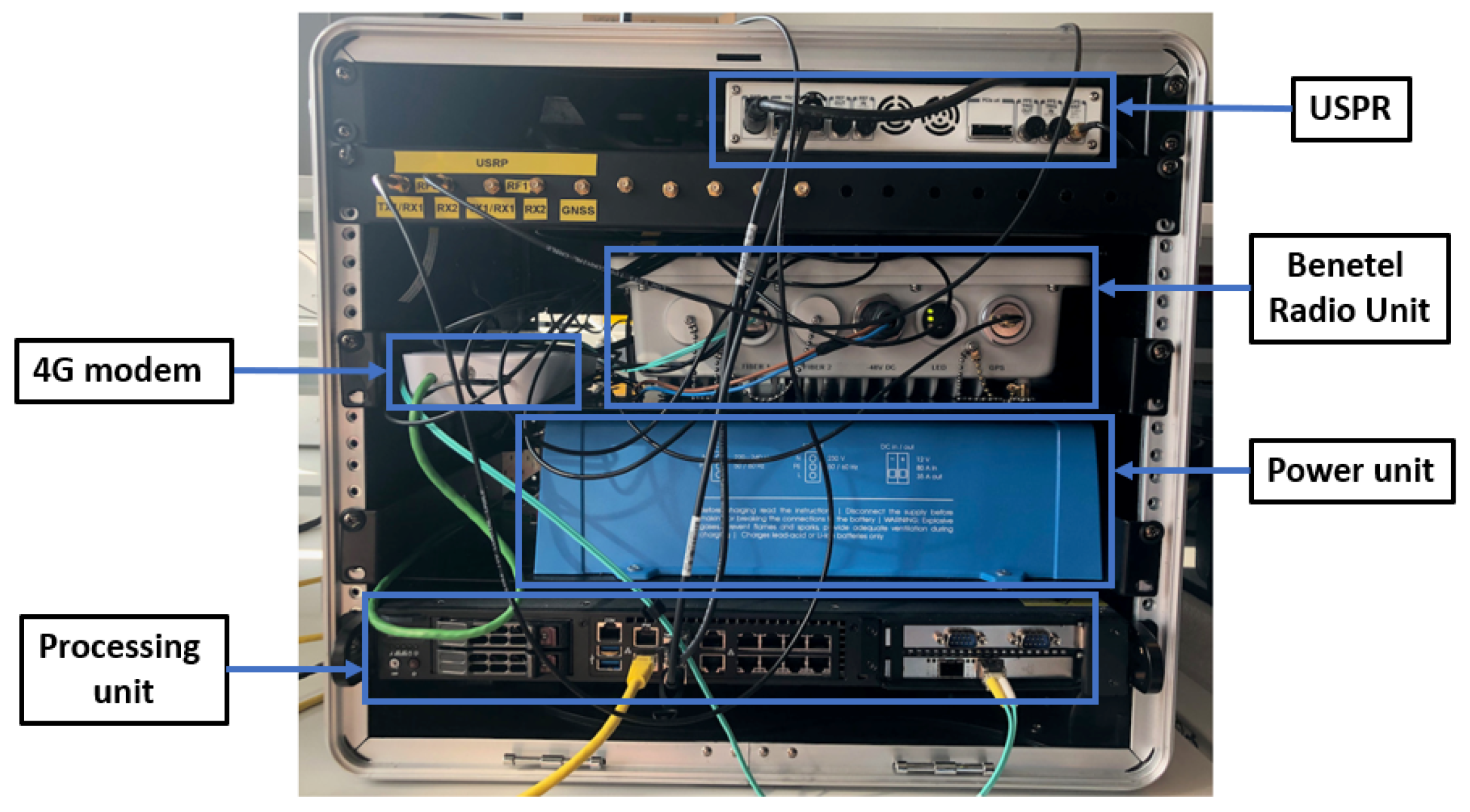
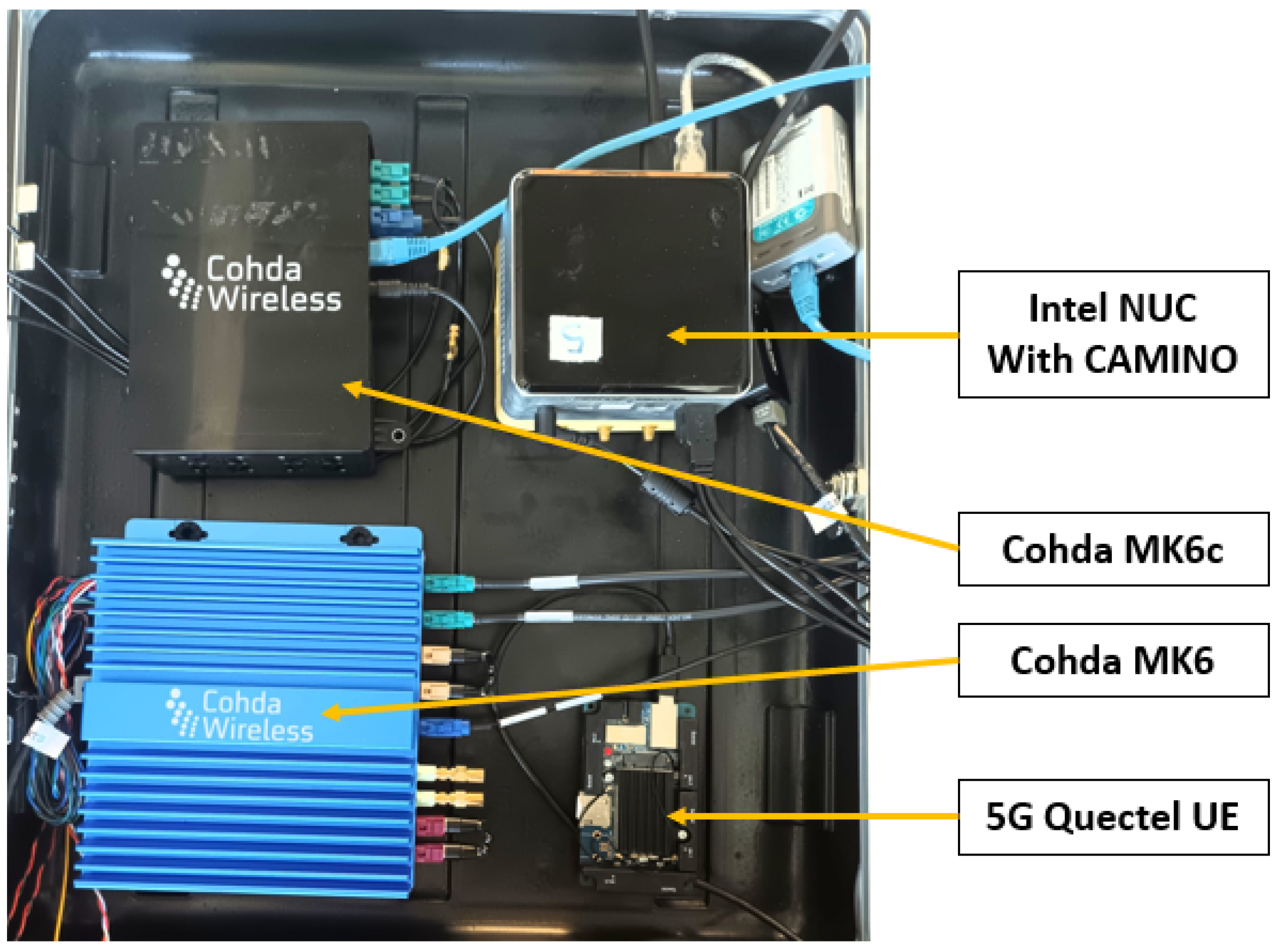
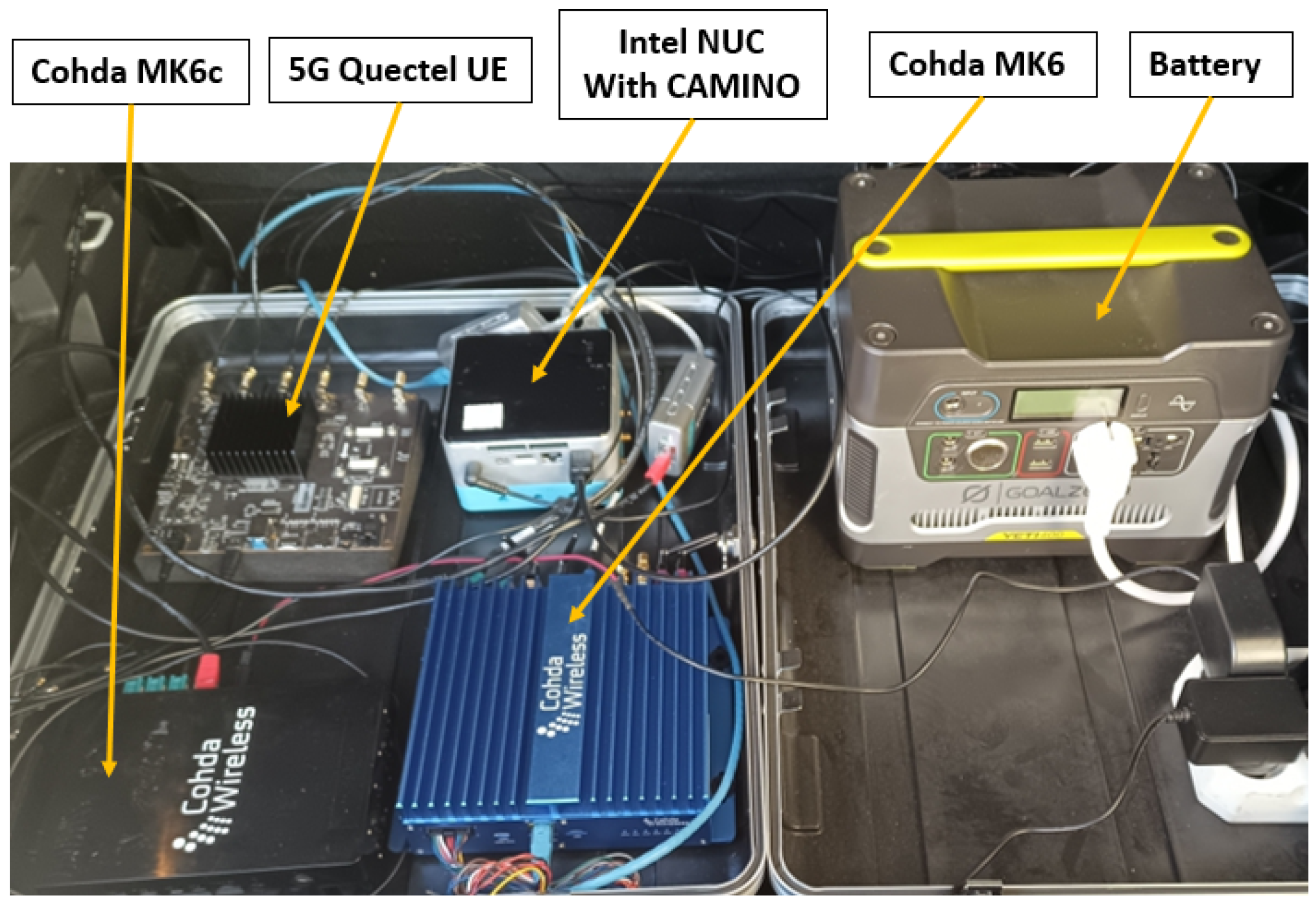
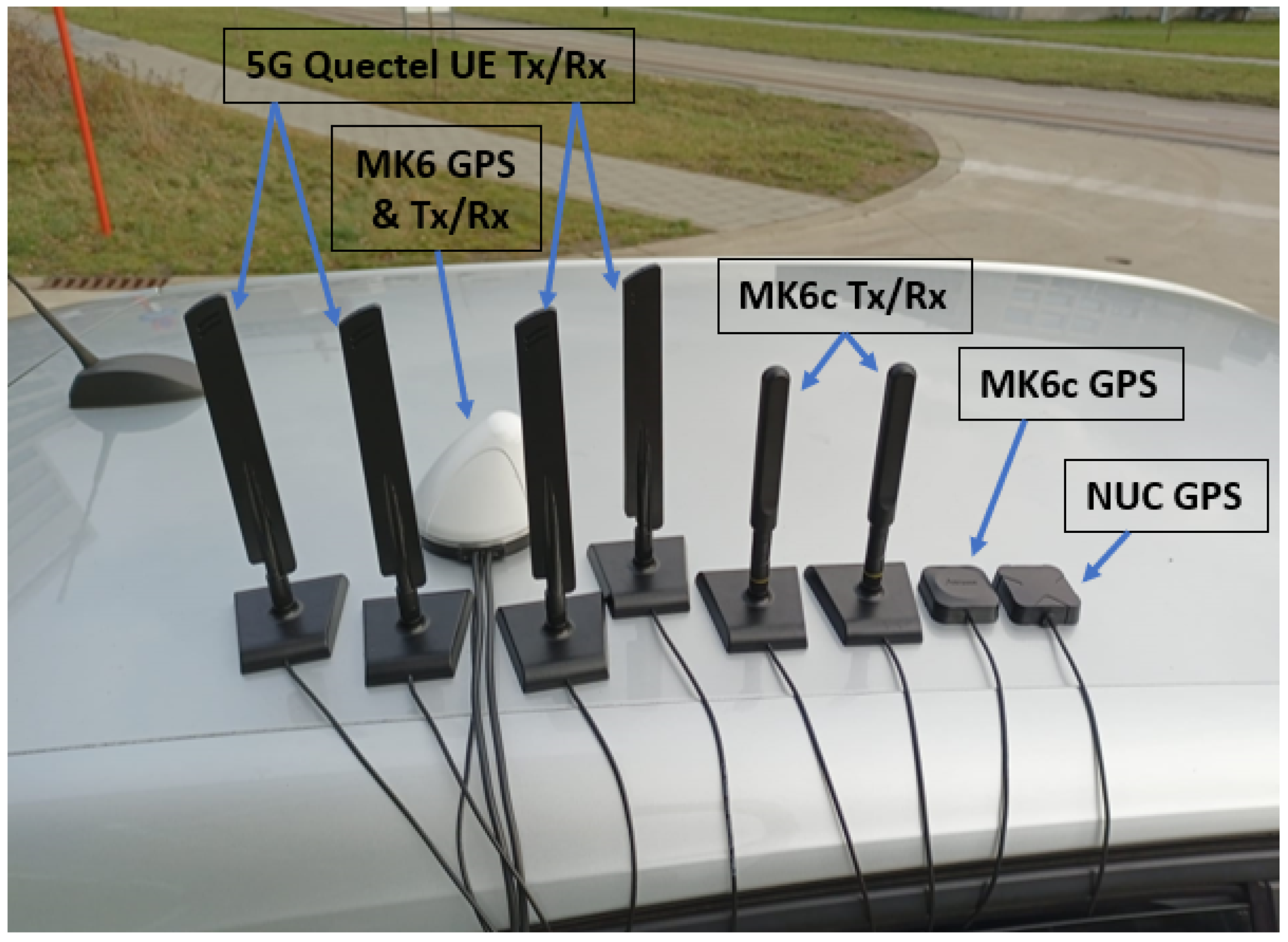
6.1. Hardware Setup and Network Diagram
6.2. Algorithm Implementation
6.2.1. The CAMINO Framework
6.2.2. C-ITS Long-Range Message Exchange via Uu Using Geocasting
7. Results and Analysis
7.1. One-Way End-to-End Latency
7.2. Packet Delivery Rate
7.3. Reliability
7.4. Simultaneous CAM and DENM Transmission
8. Conclusions & Future Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3GPP | Third Generation Partnership Project |
| 5GAA | 5G Automotive Association |
| ADAS | Advanced Driver Assistance Systems |
| AMQP | Advanced Message Queuing Protocol |
| AN | Accident Notification |
| BSM | Basic Safety Message |
| CA | Cooperative Awareness |
| CAGR | Compound Annual Growth Rate |
| CAM | Cooperative Awareness Message |
| CAMINO | vehiCulAr coMmunIcation maNagement framewOrk |
| CAV | Connected Autonomous Vehicles |
| CDF | Cumulative Distribution Function |
| C-ITS | Cooperative Intelligent Transport Systems |
| CSMA/CA | Carrier-Sense Multiple Access with Collision Avoidance |
| DEN | Decentralized Environmental Notification |
| DENM | Decentralized Environmental Notification Message |
| DSRC | Direct Short Range Communication |
| EVA | Emergency Vehicle Alert |
| FDD | Frequency Division Duplex |
| FDR | Frame Delivery Rate |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| HMI | Human Machine Interface |
| IEEE | Institute of Electrical and Electronics Engineers |
| IP | Internet Protocol |
| IVI | Infrastructure to Vehicle Information |
| IVIM | Infrastructure to Vehicle Information Message |
| KPI | Key Performance Indicators |
| LOS | Line of Sight |
| LTE | Long Term Evolution |
| MNO | Mobile Network Operator |
| MQTT | Message Queuing Telemetry Transport |
| NR | New Radio |
| NTP | Network Time Protocol |
| OBU | On-Board Unit |
| PDR | Packet Delivery Rate |
| PRB | Physical Resource Block |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| RAT | Radio Access Technology |
| RRW | Road Works Warning |
| RSU | Road Side Unit |
| RTT | Round Trip Time |
| SAE | Society of Automotive Engineers |
| SCM | Sidelink Communication Manager |
| SPS | Semi Persistent Scheduling |
| SSV | Slow or Stationary Vehicle |
| TCP | Transmission Control Protocol |
| UE | User Equipment |
| V2I | Vehicle-to-Infrastructure |
| V2N | Vehicle-to-Network |
| V2P | Vehicle-to-Pedestrian |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
Appendix A








References
- Connected Cars Market (By Technology: 3G, 4G/LTE, 5G; By Connectivity Solution: Integrated, Embedded, Tethered; By Service: Driver Assistance, Safety, Entertainment, Well-Being Vehicle Management, Mobility Management; By End Use: OEM, Aftermarket)—Global Industry Analysis, Size, Share, Growth, Trends, Regional Outlook, and Forecast 2023–2032, Precendence Research, 2023. Available online: https://www.precedenceresearch.com/connected-cars-market (accessed on 18 February 2024).
- Eckermann, F.; Moritz, K.; Christian, W. Performance analysis of C-V2X mode 4 communication introducing an open-source C-V2X simulator. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Saving Lives: Boosting Car Safety in the EU: Reporting on the Monitoring and Assessment of Advanced Vehicle Safety Features, Their Cost Effectiveness and Feasibility for the Review of the Regulations on General Vehicle Safety and on the Protection of Pedestrians and Other Vulnerable Road Users; document 52016DC0787; European Commission: Brussels, Belgium, 2016.
- Baltar, L.G.; Mueck, M.; Sabella, D. Heterogeneous vehicular communications-multi-standard solutions to enable interoperability. In Proceedings of the 2018 IEEE Conference on Standards for Communications and Networking (CSCN), Paris, France, 29–31 October 2018; pp. 1–6. [Google Scholar]
- Stellwagen, J.; Deegener, M.; Kuhn, M. Hybrid Vehicle-to-X Communication Network by Using ITS-G5 and LTE-V2X. IEEE Access 2023, 11, 30783–30795. [Google Scholar] [CrossRef]
- Yacheur, B.Y.; Ahmed, T.; Mosbah, M. DRL-based RAT Selection in a Hybrid Vehicular Communication Network. In Proceedings of the IEEE 97th Vehicular Technology Conference (VTC2023-Spring), Florence, Italy, 20–23 June 2023; pp. 1–5. [Google Scholar]
- Yacheur, B.Y.; Ahmed, T.; Mosbah, M. Efficient DRL-Based Selection Strategy in Hybrid Vehicular Networks. IEEE Trans. Netw. Serv. Manag. 2023, 20, 2400–2401. [Google Scholar] [CrossRef]
- Altahrawi, M.; Abdullah, N.F.; Nordin, R. Service-Oriented LSTM Multi-Criteria RAT Selection Scheme for Vehicle-to-Infrastructure Communication. IEEE Access 2022, 10, 110261–110284. [Google Scholar] [CrossRef]
- Ming, Y.; Chen, J.; Dong, Y.; Wang, Z. Evolutionary game based strategy selection for hybrid V2V communications. IEEE Trans. Veh. Technol. 2021, 71, 2128–2133. [Google Scholar] [CrossRef]
- Mir, Z.H.; Toutouh, J.; Filali, F.; Ko, Y.B. Enabling DSRC and C-V2X integrated hybrid vehicular networks: Architecture and protocol. IEEE Access 2020, 8, 180909–180927. [Google Scholar] [CrossRef]
- Heo, S.; Yoo, W.; Jang, H.; Chung, J.M. H-V2X mode 4 adaptive semipersistent scheduling control for cooperative Internet of Vehicles. IEEE Internet Things J. 2021, 8, 10678–10692. [Google Scholar] [CrossRef]
- Brahim, M.B.; Mir, Z.H.; Znaidi, W.; Filali, F.; Hamdi, N. QoS-aware video transmission over hybrid wireless network for connected vehicles. IEEE Access 2017, 5, 8313–8323. [Google Scholar] [CrossRef]
- Bi, S.; Chen, C.; Du, R.; Guan, X. Proper handover between VANET and cellular network improves internet access. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5. [Google Scholar]
- Dreyer, N.; Moller, A.; Mir, Z.H.; Filali, F.; Kurner, T. A data traffic steering algorithm for IEEE 802.11 p/LTE hybrid vehicular networks. In Proceedings of the IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Abidi, B.; Moreno, F.M.; El Haziti, M.; Hussein, A.; Al Kaff, A.; Gomez, D.M. Hybrid v2x communication approach using wifi and 4g connections. In Proceedings of the 2018 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain, 12–14 September 2018; pp. 1–5. [Google Scholar]
- Naudts, D.; Maglogiannis, V.; Hadiwardoyo, S.; Akker, D.V.D.; Vanneste, S.; Mercelis, S.; Hellinckx, P.; Lannoo, B.; Marquez-Barja, J.; Moerman, I. Vehicular communication management framework: A flexible hybrid connectivity platform for CCAM services. Future Internet 2021, 13, 81. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Nabil, A.; Kaur, K.; Dietrich, C.; Marojevic, V. Performance analysis of sensing-based semi-persistent scheduling in C-V2X networks. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- 3GPP Technical Specification 22.186, Group Services and System Aspects; Enhancements of 3GPP Support for V2X Services, Stage 1, Release 17, V17.0.0, March 2022. Available online: https://www.3gpp.org/ftp/Specs/archive/22_series/22.186/22186-h00.zip (accessed on 18 February 2024).
- Cohda Wireless MK6c Solution. Available online: https://www.cohdawireless.com/solutions/hardware/mk6c-evk (accessed on 15 February 2024).
- Cohda Wireless MK6 Solution. Available online: https://www.cohdawireless.com/solutions/mk6 (accessed on 15 February 2024).
- Benetel Radio Unit RAN 650. Available online: https://benetel.com/ran650/ (accessed on 27 February 2024).
- Mills, D.L. Internet time synchronization: The network time protocol. IEEE Trans. Commun. 1919, 39, 1482–1493. [Google Scholar] [CrossRef]
- Lu, M.; Blokpoel, R.; Fünfrocken, M.; Castells, J. Open architecture for internet-based C-ITS services. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 7–13. [Google Scholar]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- NordicWay Interchange. Available online: https://www.nordicway.net/interchange (accessed on 15 February 2024).
- C-Roads Working Group 2 Technical Aspects—Taskforce 4 Hybrid Communication (2023). C-ITS IP Based Interface Profile 2.0.8. Available online: https://www.c-roads.eu/platform/get-in-touch.html (accessed on 15 February 2024).
- 5GAA Automotive Association (2020). V2X Application Layer Reference Architecture. Available online: https://5gaa.org/v2x-application-layer-reference-architecture/ (accessed on 15 February 2024).
- Wieker, H.; Fünfrocken, M.; Vogt, J. Deliverable D4.3 Architecture of the Car2X Systems Network; CONVERGE Consortium: Porto, Portugal, 2015. [Google Scholar]
- Maglogiannis, V.; Naudts, D.; Hadiwardoyo, S.; Van Den Akker, D.; Marquez-Barja, J.; Moerman, I. Experimental V2X evaluation for C-V2X and ITS-G5 technologies in a real-life highway environment. IEEE Trans. Netw. Serv. Manag. 2021, 19, 1521–1538. [Google Scholar] [CrossRef]
- Coll-Perales, B.; Lucas-Estañ, M.C.; Shimizu, T.; Gozalvez, J.; Higuchi, T.; Avedisov, S.; Altintas, O.; Sepulcre, M. End-to-end V2X latency modeling and analysis in 5G networks. IEEE Trans. Veh. Technol. 2022, 72, 5094–5109. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Technologies Considered | Experiment Driven | ITS Services Considered | Frequency Adaptation | KPIs | Selection Criteria | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| PC5 | DSRC/ ITS-G5 | 4G/5G | CAM | DENM | Joint | |||||
| [5] | mode 4 | ✓ | ✕ | ✓ | ✓ | ✕ | ✕ | ✕ | Latency, range | ITS-G5 channel capacity |
| [6] | mode 3 | ✓ | ✕ | ✕ | ✕ | ✕ | ✕ | ✕ | Reliability, PRR | SNIR, latency |
| [7] | mode 3 | ✓ | ✕ | ✕ | ✓ | ✕ | ✕ | ✕ | CBR, PRR, throughput | SNIR, channel load, latency |
| [8] | mode 3 | ✓ | ✕ | ✕ | ✕ | ✕ | ✕ | ✕ | Throughput, PDR, network satisfaction | Queuing delay, capacity, connectivity time, cost. |
| [9] | mode 4 | ✓ | ✕ | ✕ | ✓ | ✓ | ✕ | ✕ | Throughput | packet size, distance |
| [10] | ✕ | ✓ | ✓ (4G) | ✕ | ✓ | ✓ | ✕ | ✓ | Data rate, latency, PDR, handovers | LTE LLI, DSRC Channel Occupancy |
| [11] | mode 4 | ✓ | ✕ | ✕ | ✓ | ✕ | ✕ | ✓ | PDR | SPS period control |
| [12] | ✕ | ✓ | ✓ (4G) | ✓ | ✕ | ✕ | ✕ | ✕ | PDR, FDR | DSRC PLR |
| [13] | ✕ | ✓ | ✓ (4G) | ✕ | ✕ | ✕ | ✕ | ✕ | Load balancing, data rate, vehicle fairness | RSS (of RSUs and BSs) |
| [14] | ✕ | ✓ | ✓ (4G) | ✕ | ✓ | ✕ | ✕ | ✕ | Delay | LTE LLI, 802.11p load |
| [15] | ✕ | ✕ | ✓ (4G) | ✓ | ✕ | ✕ | ✕ | ✕ | RTT | WiFi signal strength |
| This work | mode 4 | ✓ | ✓ (5G) | ✓ | ✓ | ✓ | ✓ | ✓ | Latency, PDR, Reliability, CAM/DENM frequency | distance, latency, CAM traffic density, C-ITS message type, speed |
| Use Case | Reliability | Max. Latency | Max. Range |
|---|---|---|---|
| Vehicle Platooning | 99.99% | 10 ms | 350 m |
| Advanced Driving | 99.999% | 3 ms | 700 m |
| Extended Sensors | 99.999% | 3 ms | 1000 m |
| Remote Driving | 99.999% | 5 ms | - |
| Timestamp | Log Station Id | App Id | Action | Generated Station Id | V2X Technology | Message Type | TAI Time | UTC Time | asn1data |
|---|---|---|---|---|---|---|---|---|---|
| 1703071463323 | 101 | 1 | SENT | 101 | DSRC | ETSI.CAM | ..53218 | ..16218 | 0102... |
| 1703071463323 | 101 | 1 | SENT | 101 | LTE-V2X | ETSI.CAM | ..53218 | ..16218 | 0102... |
| 1703071463323 | 101 | 1 | SENT | 101 | CELLULAR | ETSI.CAM | ..53218 | ..16218 | 0102... |
| 1703071464288 | 101 | 1 | RECEIVED | 102 | DSRC | ETSI.CAM | ..54180 | ..17180 | 0102... |
| 1703071464298 | 101 | 1 | RECEIVED | 102 | LTE-V2X | ETSI.CAM | ..54180 | ..17180 | 0102... |
| 1703071464304 | 101 | 1 | RECEIVED | 102 | CELLULAR | ETSI.CAM | ..54180 | ..17180 | 0102... |
| Parameter | Value |
|---|---|
| Testing rounds | 10 |
| Total testing days | 5 |
| Total CAMs sent | 22,000 |
| Total DENMs sent | 52,000 |
| CAM Only | CAM & DENM | |
|---|---|---|
| CAM density < | fCAM = 10 | fCAM = 1, fDENM = 5 |
| CAM density ≥ | fCAM = 1 | fCAM = 1, fDENM = 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khalid, I.; Maglogiannis, V.; Naudts, D.; Shahid, A.; Moerman, I. Optimizing Hybrid V2X Communication: An Intelligent Technology Selection Algorithm Using 5G, C-V2X PC5 and DSRC. Future Internet 2024, 16, 107. https://doi.org/10.3390/fi16040107
Khalid I, Maglogiannis V, Naudts D, Shahid A, Moerman I. Optimizing Hybrid V2X Communication: An Intelligent Technology Selection Algorithm Using 5G, C-V2X PC5 and DSRC. Future Internet. 2024; 16(4):107. https://doi.org/10.3390/fi16040107
Chicago/Turabian StyleKhalid, Ihtisham, Vasilis Maglogiannis, Dries Naudts, Adnan Shahid, and Ingrid Moerman. 2024. "Optimizing Hybrid V2X Communication: An Intelligent Technology Selection Algorithm Using 5G, C-V2X PC5 and DSRC" Future Internet 16, no. 4: 107. https://doi.org/10.3390/fi16040107
APA StyleKhalid, I., Maglogiannis, V., Naudts, D., Shahid, A., & Moerman, I. (2024). Optimizing Hybrid V2X Communication: An Intelligent Technology Selection Algorithm Using 5G, C-V2X PC5 and DSRC. Future Internet, 16(4), 107. https://doi.org/10.3390/fi16040107