Design and Experimental Verification of Voltage Measurement Circuits Based on Linear Optocouplers with Galvanic Isolation for Battery Management Systems



Abstract
:1. Introduction
- During the development process of BMS with battery chargers and converters for automotive and stationary applications. Due to health and safety requirements, the laboratory experimental setup must have galvanic isolation between the high voltage battery pack, and the human interface devices. Additionally, the development process based on galvanically isolated subsystems gives bigger flexibility for problem-solving, as it helps the different sources of noises, voltage ripples, overvoltages, etc. to be localised.
- For automotive and stationary applications where two grounds of two different systems, i.e., charger/converter and BMS/control system must be separated. Permanent galvanic isolation in exploitation can be required for systems with high EMI (electromagnetic interference), electric noise, etc.
- In order for all on-board automotive electronics requirements given in safety standards to be met, i.e., safety, reliability, robustness, maintainability, and testability, (e.g., ISO-26262).
2. Analysis
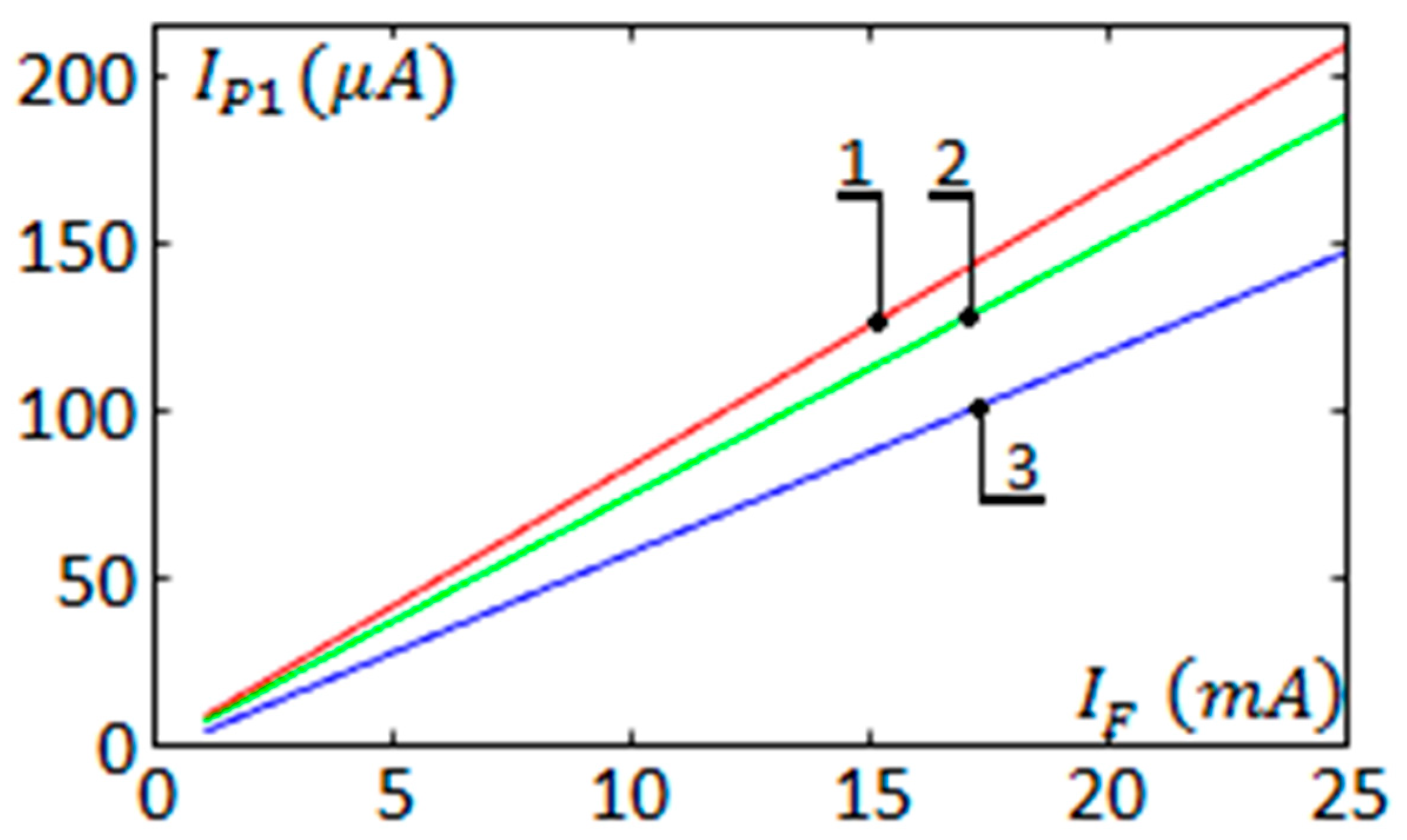
- Imprecise values for the most sensitive parameters as gains, LED current and photocurrent, chosen directly from diagrams during the design procedure. These variables are usually given graphically in the manufacturers’ datasheets, but some of them do not have a satisfactory resolution which in this case leads to imprecise selection and eventually wrong calculations. This problem can be addressed with graphical data digitising, which is supposed to give more precise data.
- Input voltage ranges, which must be described for the specific application. In this case, the voltage of most Lithium-ion cells is set on minimum cut-off 2.2 V, nominal 3.7 V, and maximum 4.2 V during the charging process. This problem requires a design procedure to be written and experimentally verified exactly for this case.
- The power supply voltage for the primary and secondary side operational amplifiers must be higher than the measurement input voltage, i.e., the cell battery voltage. Within the entire range of amplification, saturation must be avoided. Here, despite the initial desire for the power supply voltage to be as low as possible in order to reduce the power losses, the minimum possible supply voltage will depend on the maximum input voltage.
3. Design
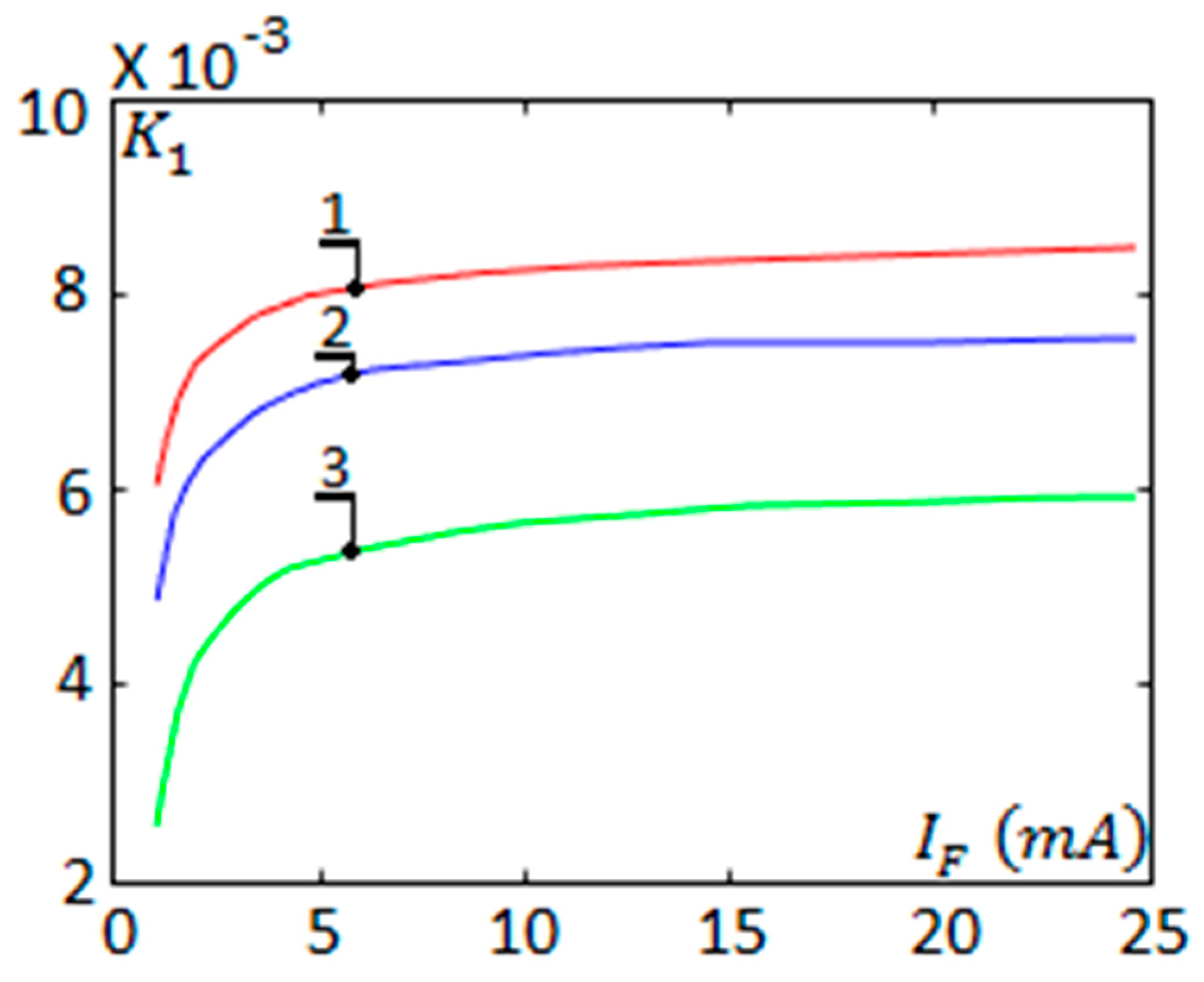
3.1. Determine the Servo Gain
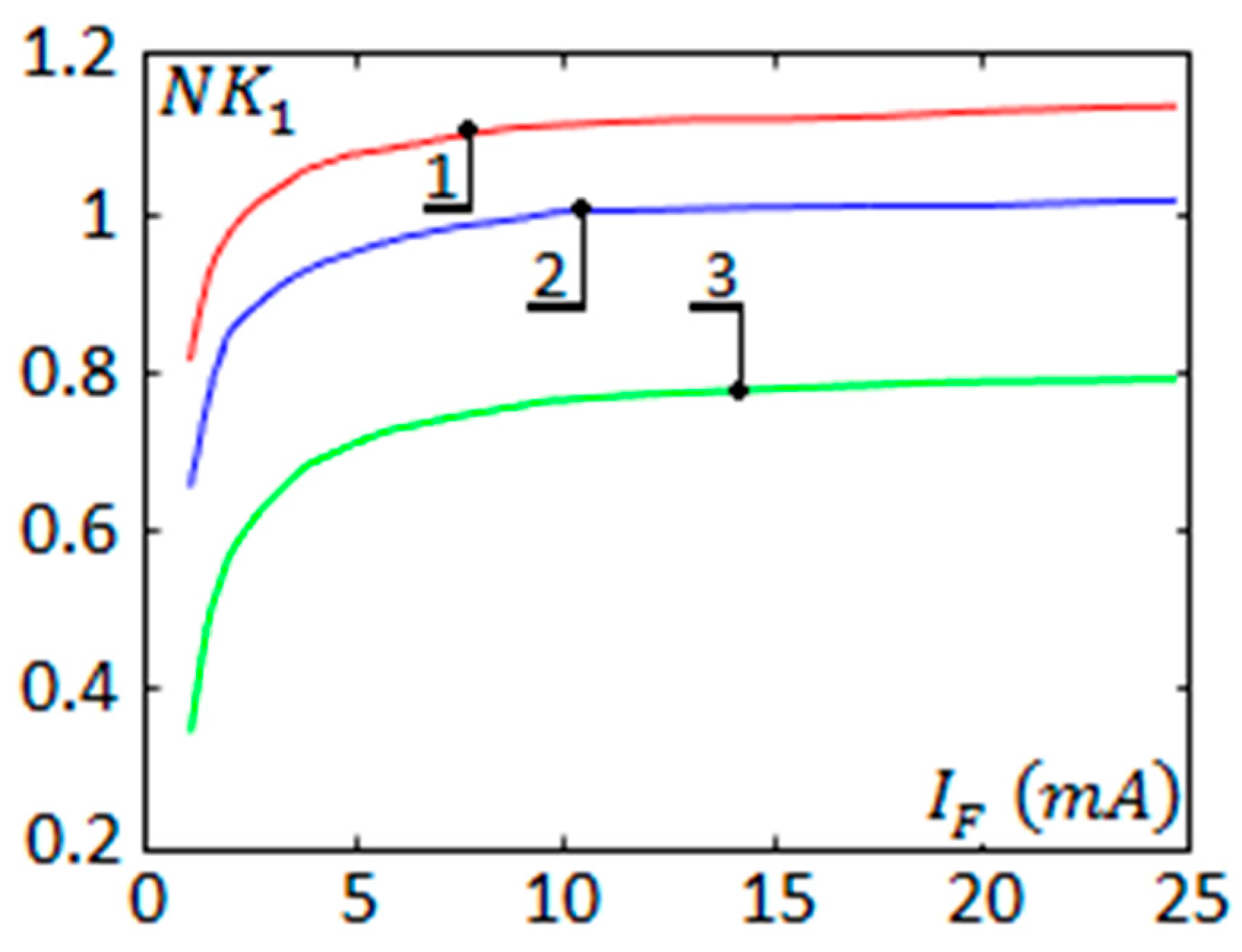
3.2. Determine the Normalized Servo Gain
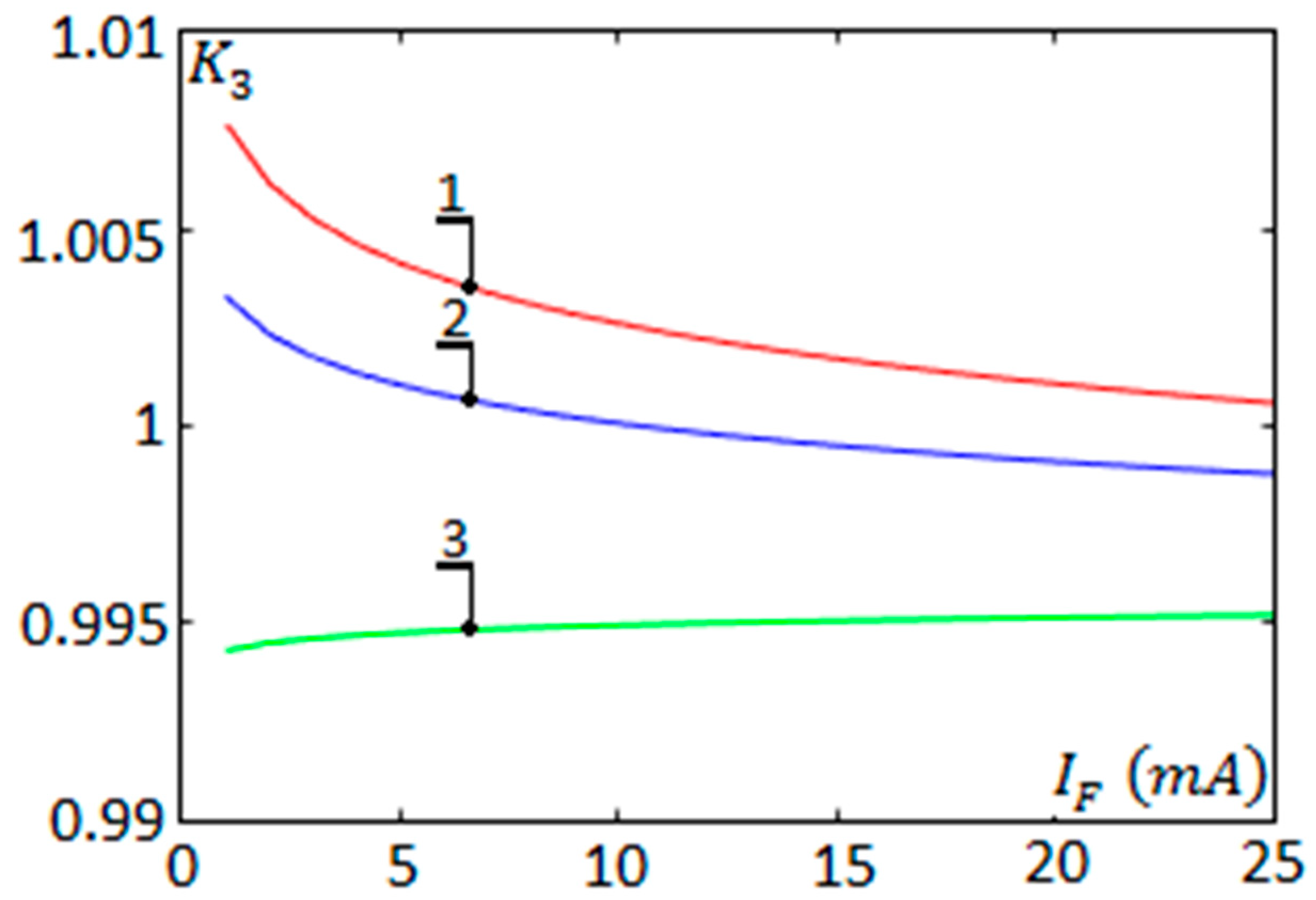
3.3. Determine the Transfer Gain
3.4. Determine the Elements on the Primary and Secondary Circuit Sides
4. Experimental Set-Up
5. Conclusions
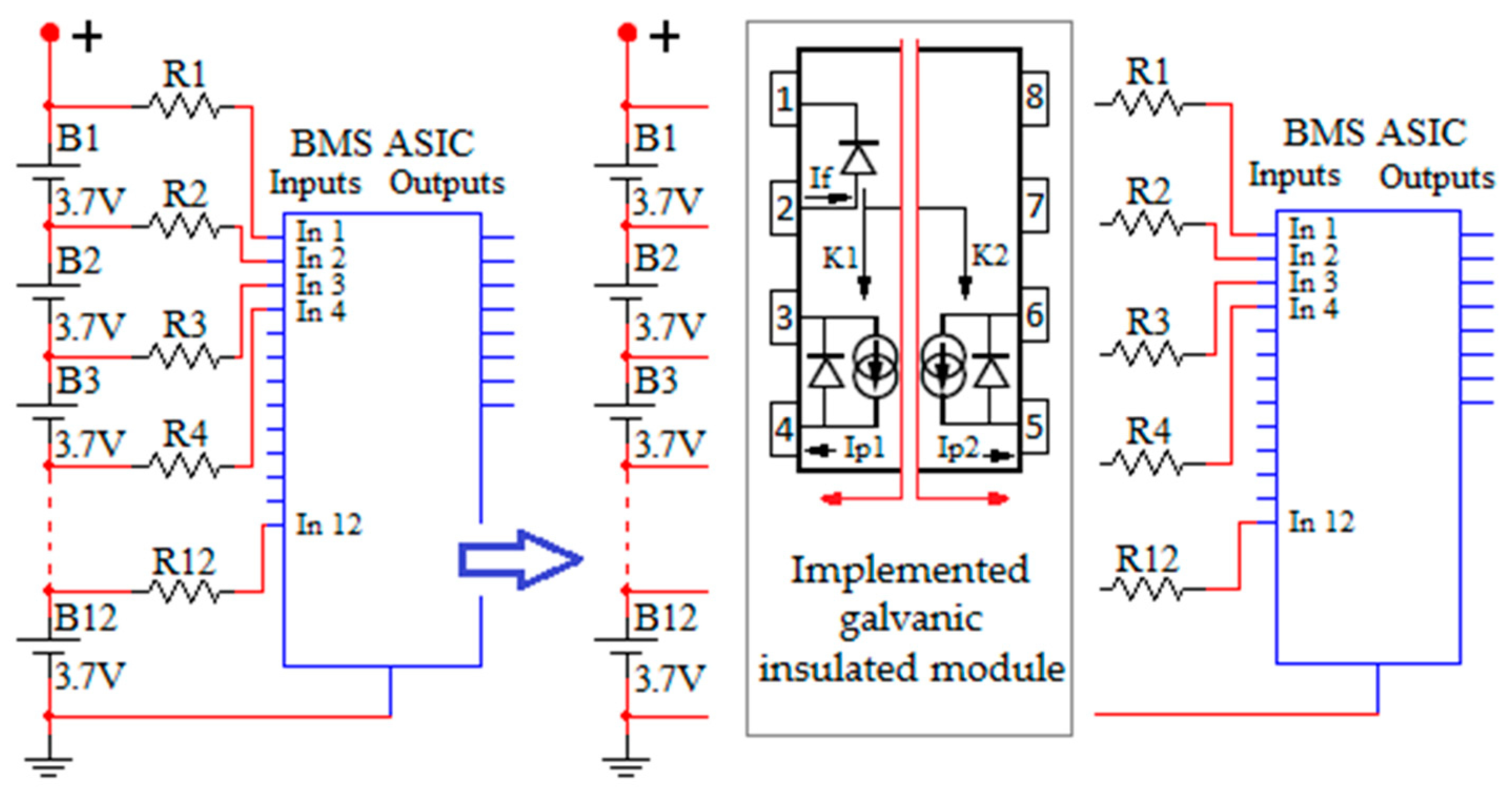
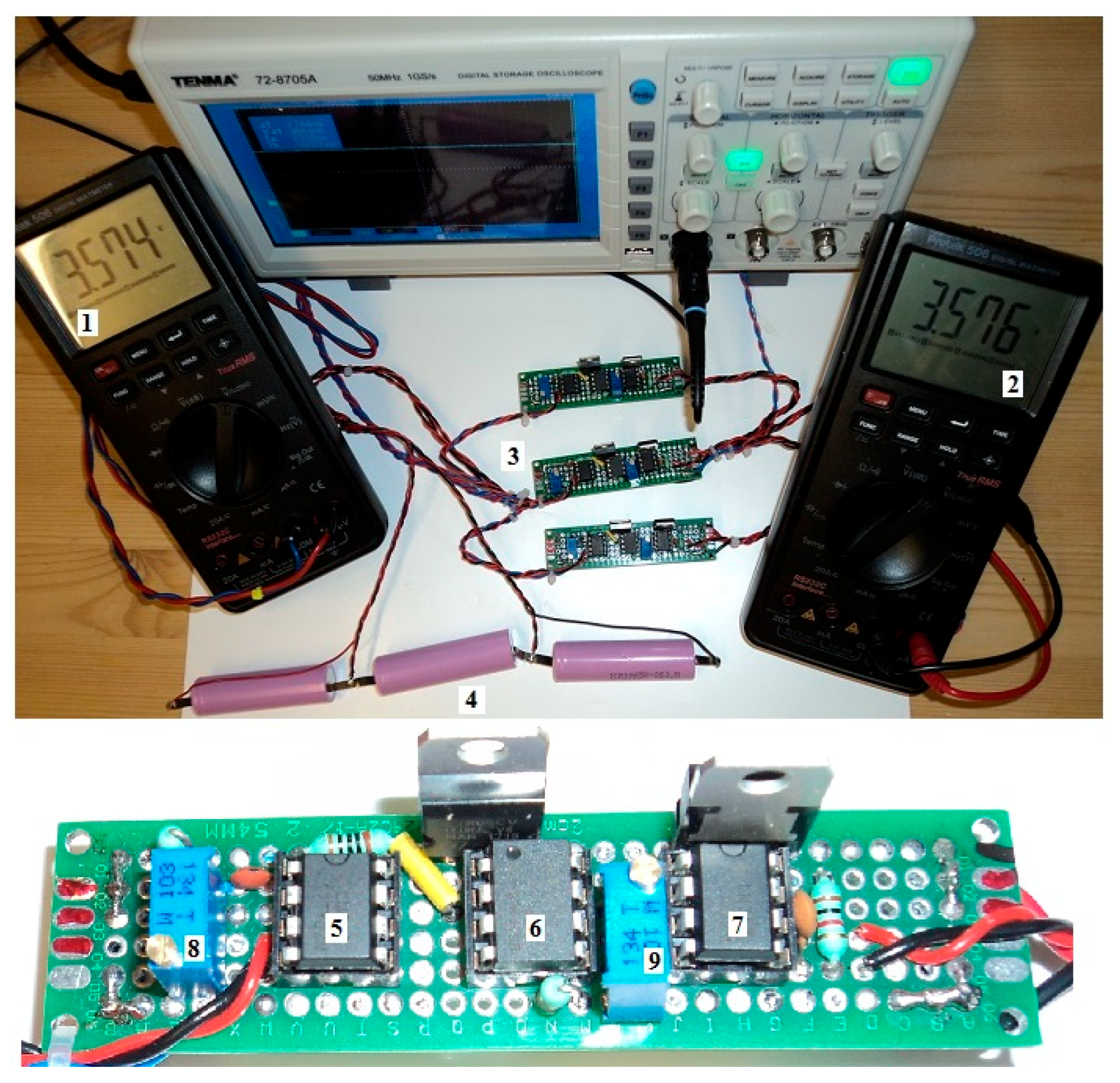
- The investigated type of linear optocouplers based on PIN diodes are suitable for galvanic isolated voltage measurement circuits for BMS on the position as shown in Figure 1. The presented circuit (Figure 1, Figure 2) is stable within the entire voltage range of the tested Lithium-ion battery cells with complicit galvanic isolation. Following the requirements given, in Table 1, a robust system with better safety level for automotive and stationary applications can be built. Such a system can be used during the research and development stage of a project or as a permanent solution.
- The problem with the input/output voltage mismatch can be solved using precise design procedure. A good precision is achieved with digitising the graphical data as Figure 4, Figure 5, Figure 6 and Figure 7 show, respectively transformed to equations Equations (1)–(6), Equations (9)–(11), Equations (12)–(14), and Equations (16)–(21). This approach helps the calculation process to be automated using MATLAB scripts. Additionally, experiments have shown that the power supply voltage of the operational amplifiers on the primary and secondary side have to be 1.5–2 V bigger than the maximum input voltage (4.2 V), i.e., 6–6.5 V, to avoid saturation.
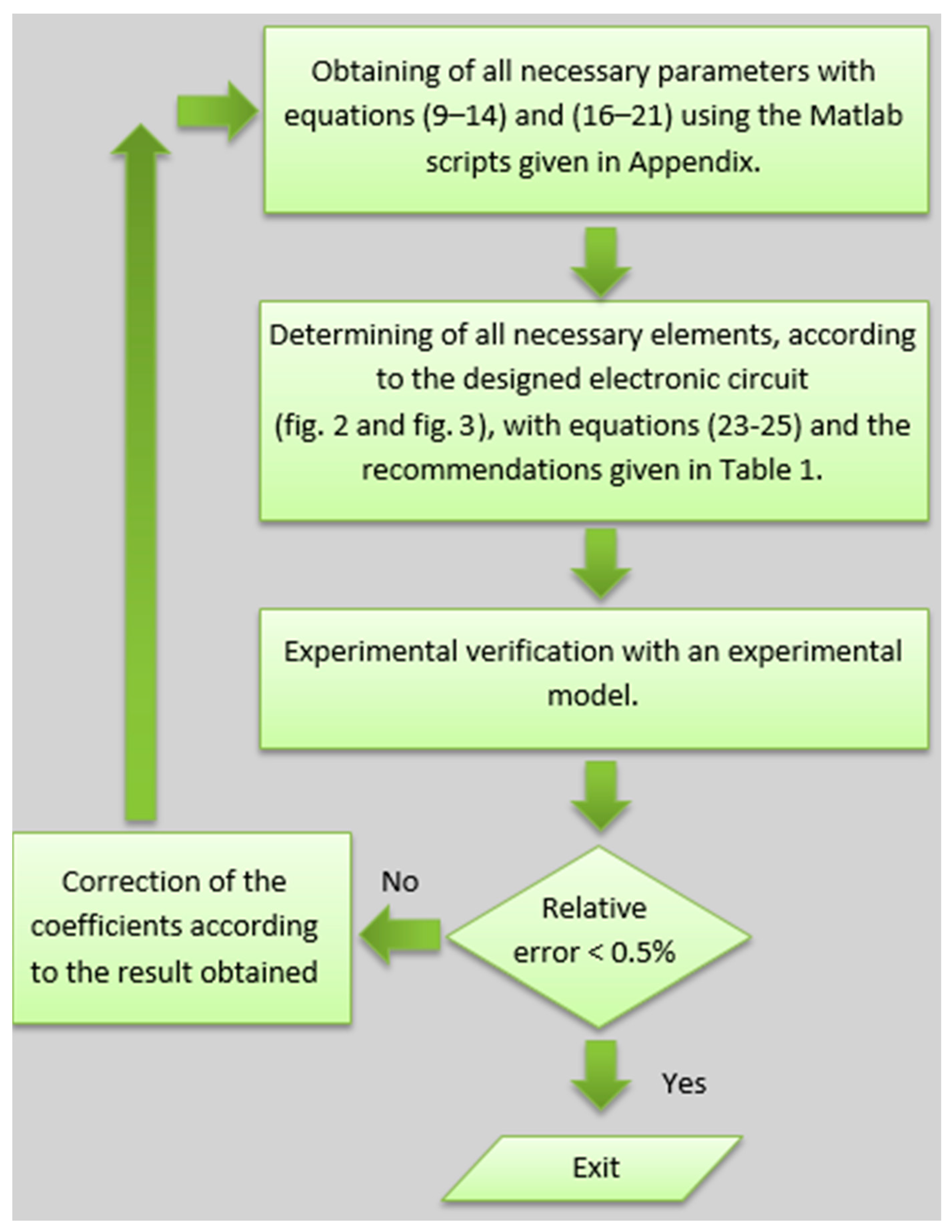
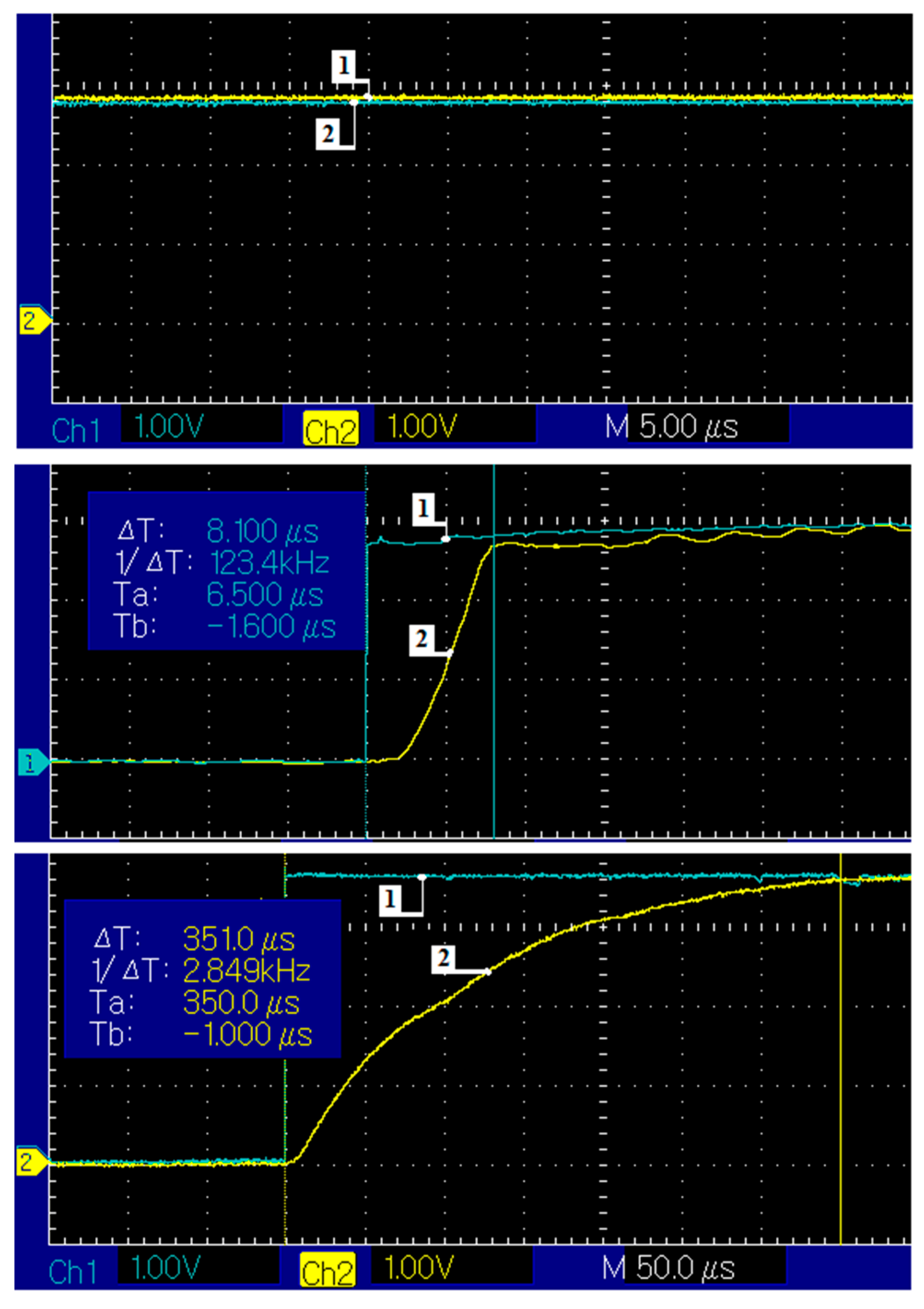
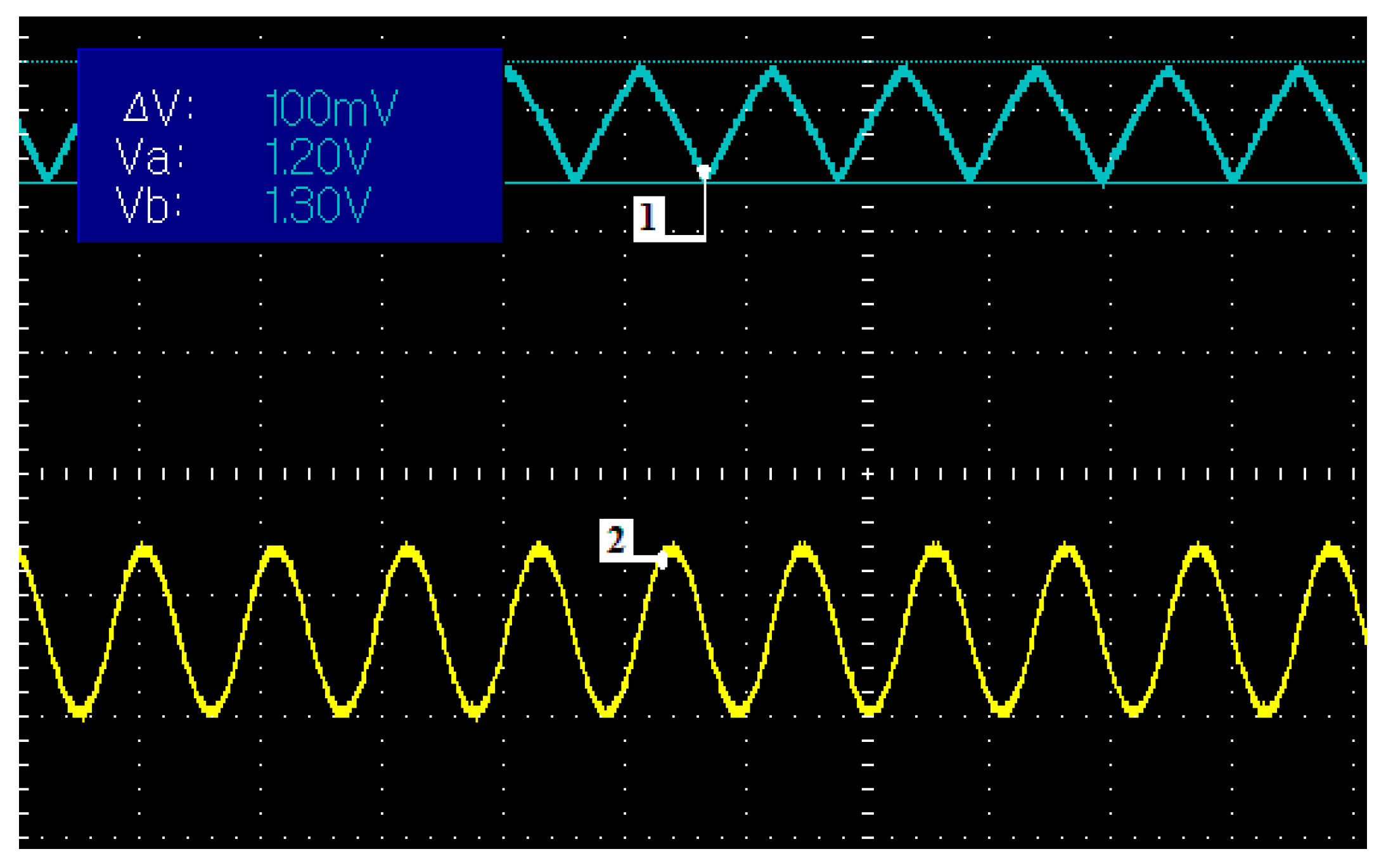
- The suggested design procedure, derived from the general manufacturers’ manuals, can be used for the successful design of systems with Lithium-ion batteries, applicable for stationary and automotive BMS. The design methodology, shown in Figure 8, has been experimentally proofed as Figure 9, Figure 10, Figure 11 and Figure 12 show. The electronic components selection considerations, given in Table 2, can be used as guidance for future design.
Author Contributions
Funding
Conflicts of Interest
Appendix A
| clear | |
| format short | |
| NK1_0deg = | % matrix (12) |
| [−1.668069E-7, 14.09345E-6, | |
| −46.61038E-5, 76.48176E-4, | |
| −65.22701E-3, 27.78539E-2, | |
| 62.03658E-2]; | |
| If = 10; | % LED current IF (mA) |
| polyval (NK1_0deg, If) | % ans = 1.1059 |
| clear | |
| format short | |
| If = 10; | % LED current IF (mA) |
| 1.0077 * If^−0.0022 | % Equation (16) |
| −0.0022 * log(If) + 1.0077 | % Equation (19) |
| % ans = 1.0026 | |
References
- Affanni, A.A.; Bellini, G.; Franceschini, P.; Guglielmi, C.; Tassoni, C. Battery Choice and Management for New-Generation Electric Vehicles. IEEE Trans. Ind. Electron. 2005, 52, 1343–1349. [Google Scholar] [CrossRef] [Green Version]
- Azidin, F.A.; Hannan, M.A.; Mohamed, A. An Energy Management of Light Electric Vehicle. Int. J. Smart Grid Clean Energy 2013, 2, 271–276. [Google Scholar] [CrossRef]
- Chatzakis, J.; Kalaitzakis, K.; Voulgaris, N.S.; Manias, S.N. Designing a New Generalized Battery Management System. IEEE Trans. Ind. Electron. 2003, 50, 990–999. [Google Scholar] [CrossRef]
- Chen, C.; Man, K.L.; Ting, T.O.; Lei, C.U.; Krilavičius, T.; Jeong, T.; Seon, J.; Guan, S.; Wong, P.W.H. Design and Realization of a Smart Battery Management System. In Proceedings of the International Multi Conference of Engineering and Computer Scientist, Hong Kong, China, 14–16 March 2012; Volume II. [Google Scholar]
- Chunyan, X.; Yan, J.; Weichong, Z.; Tao, X. Battery Management System Design and Implementation of Intelligent Emergency Light Based on the Technology of Loose Capacitance and FSM. Int. J. Smart Home 2015, 9, 83–94. [Google Scholar] [CrossRef]
- Kavalchuk, I.; Nguyen, H.; Pham, T.; Stojcevski, A. Methodology of Intelligent Energy Management System Simulation for Electric Vehicle Applications with Asynchronous Logic Controller. In Proceedings of the 7th International Conference on Intelligent Systems, Modelling and Simulation, Bangkok, Thailand, 25–27 January 2016. [Google Scholar]
- Kim, E.; Lee, J.; Shin, K. Real-Time Battery Thermal Management for Electric Vehicles. In Proceedings of the ICCPS’14, Berlin, Germany, 14–17 April 2014. [Google Scholar]
- Kim, G.; Gonder, J.; Lustbader, J.; Pesaran, A. Thermal Management of Batteries in Advanced Vehicles Using Phase-Change Materials. World Electr. Veh. J. 2008, 2, 134–147. [Google Scholar] [CrossRef] [Green Version]
- De Hoog, J.; Jaguemont, J.; Abdel-Monem, M.; Van Den Bossche, P.; Van Mierlo, J.; Omar, N. Combining an Electrothermal and Impedance Aging Model to Investigate Thermal Degradation Caused by Fast Charging. Energies 2018, 11, 804. [Google Scholar] [CrossRef]
- Liu, P.; Zhang, X. The Design of Smart Battery Management Systems. J. Comput. 2011, 6, 2484–2490. [Google Scholar] [CrossRef]
- Vitols, K. Design of an Embedded Battery Management System with Passive Balancing. In Proceedings of the 6th European Embedded Design in Education and Research IEEE, Milan, Italy, 11–12 September 2014. [Google Scholar]
- Pitorac, C. An Inside Look in The Electrical Structure of the Battery Management System Topic Number: Renewable Power Sources, Power Systems and Energy Conversion. Int. J. Tech. Res. Appl. 2015, 3, 8–12. [Google Scholar]
- Zhang, L.; Peng, H.; Ning, Z.; Mu, Z.; Sun, C. Comparative Research on RC Equivalent Circuit Models for Lithium-Ion Batteries of Electric Vehicles. Appl. Sci. 2017, 7, 1002. [Google Scholar] [CrossRef]
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D. Battery Management System Hardware Concepts: An Overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef]
- Khan, M.R.; Swierczynski, M.; Kær, S. Towards an Ultimate Battery Thermal Management System: A Review. Batteries 2017, 3, 9. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.; Tsui, K.; Pecht, M. Battery Management Systems in Electric and Hybrid Vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Mathew, M.; Janhunen, S.; Rashid, M.; Long, F.; Fowler, M. Comparative Analysis of Lithium-Ion Battery Resistance Estimation Techniques for Battery Management Systems. Energies 2018, 11, 1490. [Google Scholar] [CrossRef]
- Xu, J.; Wang, J.; Li, S.; Cao, B. A Method to Simultaneously Detect the Current Sensor Fault and Estimate the State of Energy for Batteries in Electric Vehicles. Sensors 2016, 16, 1328. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.; Mu, H.; Zhao, L.; Cao, W. A New Data-Stream-Mining-Based Battery Equalization Method. Energies 2015, 8, 6543–6565. [Google Scholar] [CrossRef] [Green Version]
- Yuan, S.; Wu, H.; Yin, C. State of Charge Estimation Using the Extended Kalman Filter for Battery Management Systems Based on the ARX Battery Model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Shang, Y.; Zhang, Q.; Cui, N.; Zhang, C. A Cell-to-Cell Equalizer Based on Three-Resonant-State Switched-Capacitor Converters for Series-Connected Battery Strings. Energies 2017, 10, 206. [Google Scholar] [CrossRef]
- Dimitrov, B.; Cruden, A.; Krishna, M.; Sharkh, S.; Elkhateb, A. Analysis Design and Experimental Verification of a Primary Side Current Sensing Flyback Converter Used in a Battery Management System. J. Electron. 2018, 7, 43. [Google Scholar] [CrossRef]
- Chen, C.; Hu, Y.; Luo, W.; Wang, C.; Juan, C. A High Voltage Analog Multiplexer with Digital Calibration for Battery Management Systems. In Proceedings of the IEEE International Conference on IC Design Technology, Austin, TX, USA, 30 May–1 June 2012. [Google Scholar]
- Chon, S.; Beall, J. Intelligent Battery Management and Charging for Electric Vehicles, Texas Instruments Manuscript. Available online: https://www.ti.com/lit/wp/spry304a/spry304a.pdf (accessed on 21 April 2019).
- Datasheet ISL94202. Series Charge/Discharge Path 3-to-8 Cell Li-Ion Battery Pack Monitor. Available online: https://www.renesas.com/eu/en/doc/datasheet/isl94202.pdf (accessed on 20 July 2019).
- Datasheet LTC6802-2. Multicell Addressable Battery Stack Monitor, Linear Technology. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/68022fa.pdf (accessed on 20 July 2019).
- Datasheet BQ769X0. 3-Series to 15-Series Cell Battery Monitor Family for Li-ion and Phosphate Applications. Available online: http://www.ti.com/lit/ds/symlink/bq76940.pdf (accessed on 20 July 2019).
- Datasheet MC33771B. Battery Cell Controller IC. Available online: https://www.nxp.com/docs/en/data-sheet/MC33771B_SDS.pdf (accessed on 21 April 2019).
- Datasheet MAX11068. 12-Channel, High-Voltage Sensor, Smart Data-Acquisition Interface, Industry’s First Li+ Battery-Management IC for Hybrid Electric Vehicle Applications, Maxim Integrated. Available online: https://www.maximintegrated.com/en/products/power/battery-management/MAX11068.html (accessed on 20 July 2019).
- Andrea, D. Battery Management Systems for Large Lithium-Ion Battery Packs; Artech House: London, UK, 2010; ISBN 978-1-60807-104-3. [Google Scholar]
- Daowd, M.; Antoine, M.; Omar, N.; Bossche, P.; Mierlo, J. Single Switched Capacitor Battery Balancing System Enhancements. Energies 2013, 6, 2149–2174. [Google Scholar] [CrossRef] [Green Version]
- Lin, J. Development of a New Battery Management System with an Independent Balance Module for Electrical Motorcycles. Energies 2017, 10, 1289. [Google Scholar] [CrossRef]
- Brandl, M.; Gall, H.; Wenger, M.; Lorentz, V.; Giegerich, M.; Baronti, F.; Fantechi, G.; Fanucci, L.; Roncella, R.; Saletti, R.; et al. Batteries and battery management systems for electric vehicles. In Proceedings of the 2012 Design, Automation Test in Europe Conference Exhibition, Dresden, Germany, 12–16 March 2012. [Google Scholar]
- Vishay Semiconductors. Linear Optocouplers Manufacturer. Available online: https://www.vishay.com (accessed on 21 April 2019).
- Vishay Semiconductors. Application Note 50, Designing Linear Amplifiers Using the IL300 Optocoupler. Available online: https://www.vishay.com/docs/83708/appnote50.pdf (accessed on 20 July 2019).
- Vishay Semiconductors. IL300 Datasheet, Linear Optocoupler, High Gain Stability, Wide Bandwidth. Available online: http://www.vishay.com/docs/83622/il300.pdf (accessed on 20 July 2019).
- Broadcom Inc. Linear Optocouplers Manufacturer. Available online: https://www.broadcom.com/ (accessed on 20 July 2019).
- Broadcom Inc. HCNR200 Datasheet, High-Linearity Analog Optocouplers. Available online: https://www.broadcom.com/products/optocouplers/industrial-plastic/specific-function/high-linearity-analog/hcnr201 (accessed on 20 July 2019).
- Avago. HCNR201 Datasheet, Application Note 1357, Overview of High Performance Analog Optocouplers. Available online: https://wenku.baidu.com/view/1ddfb7e2b8f67c1cfad6b83a.html?re=view (accessed on 20 July 2019).
- IXYS. Linear Optocouplers Manufacturer. Available online: https://www.ixys.com/ (accessed on 20 July 2019).
- IXYS. LOC110 Datasheet, Single Linear Optocoupler. Available online: http://www.ixysic.com/home/pdfs.nsf/www/LOC110.pdf/$file/LOC110.pdf (accessed on 20 July 2019).
- IXYS. LOC111 Datasheet, Single Linear Optocoupler. Available online: http://www.ixysic.com/home/pdfs.nsf/www/LOC111.pdf/$file/LOC111.pdf (accessed on 20 July 2019).
- IXYS. LOC111 Datasheet, Single Linear Optocoupler. Available online: http://www.ixysic.com/home/pdfs.nsf/www/LOC112.pdf/$file/LOC112.pdf (accessed on 20 July 2019).
- IXYS. LOC117 Datasheet, Single Linear Optocoupler. Available online: http://www.ixysic.com/home/pdfs.nsf/www/LOC117.pdf/$file/LOC117.pdf (accessed on 20 July 2019).
- IXYS. LOC210 Datasheet, Dual Linear Optocoupler. Available online: http://www.ixysic.com/home/pdfs.nsf/www/LOC210.pdf/$file/LOC210.pdf (accessed on 20 July 2019).
- IXYS. LOC211 Datasheet, Dual Linear Optocoupler. Available online: http://www.ixysic.com/home/pdfs.nsf/www/LOC211.pdf/$file/LOC211.pdf (accessed on 20 July 2019).
- Jang, W. Op Amp Applications Handbook; Analog Devices, Inc.: Norwood, MA, USA, 2005; ISBN 0-7506-7844-5. [Google Scholar]
- Zumbahlen, H. Basic Linear Design; Analog Devices, Inc.: Norwood, MA, USA, 2007; ISBN 0-916550-28-1. [Google Scholar]
- Power, X.P. ITX DC-DC Converters. Available online: https://www.xppower.com (accessed on 20 July 2019).
- Datasheet, L.M. 358, Texas Instrument. Available online: http://www.ti.com/lit/ds/symlink/lm158-n.pdf (accessed on 20 July 2019).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element (Reference Figure 2 and Figure 3) | Recommendations for Elements Selection |
|---|---|
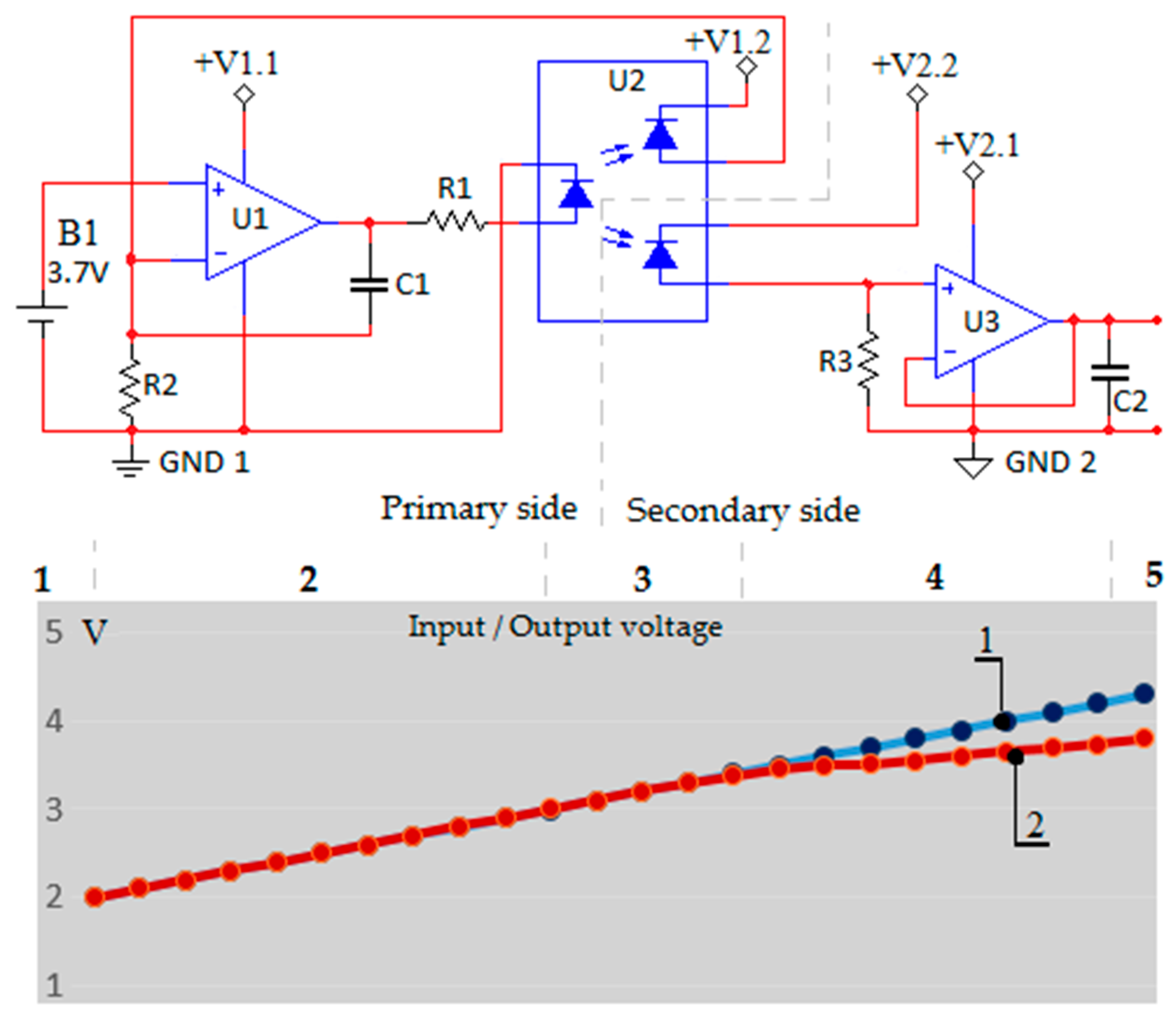
| Primary side operational amplifier U1 | The design of the primary and secondary operational amplifier circuits has been done according to the well-established literature for analog circuits [47,48] and is not presented in detail here. As Figure 2 shows, the non-inverting input is directly connected to the Lithium-ion cell. For this application, an input divider would not be necessary as the cell voltage matches the input voltage op-amp range. However, a first-order R-C filter can be used the input voltage ripples during the charging process to be filtered at the input. |
| Resistor R1 | It limits the LED current through U2 primary side LED. |
| Resistor R2 | It adjusts the servo feedback connection from the primary side photodiode, respectively the output current. |
| Resistor R3 | It adjusts the secondary side photocurrent, respectively the voltage on the voltage follower which must be equal to the . Effectively the entire circuit precision depends on resistors R1, R2 and R3 tolerances, and therefore a 0.1% tolerance is required. |
| Linear optocoupler U2 | The key building block of this design. All of the above-given optocouplers [34,35,36,37,38,39,40,41,42,43,44,45,46] have similar structure and parameters, which make them applicable for this design. |
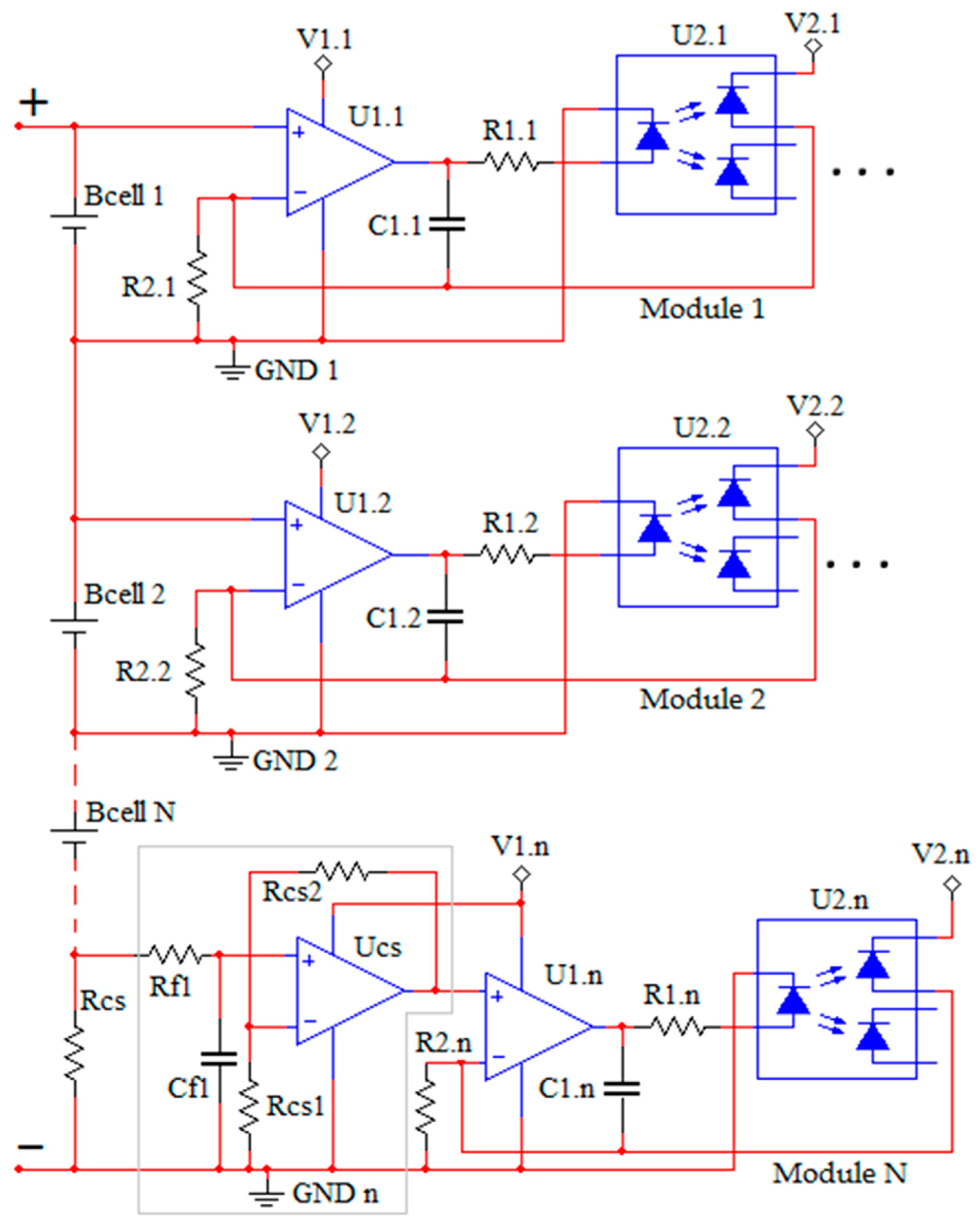
| Secondary side operational amplifier U3 | As amplification in this design is not necessary, i.e., the input-output transfer ratio must be 1:1, a circuit with a voltage follower has been chosen, in order for the necessary current to be supplied to the next stage (ASIC or microcontroller). The requirements for the secondary side operational amplifier are the same as these to the primary side. The primary and the secondary side operational amplifiers must be separated not to share the same ground (different ICs). The same requirement is set for the amplifiers between the different channels (Figure 3) i.e., they must operate with separate ground lines. |
| Capacitor C1 | Compensation capacitor for system stability. According to the manufacturers’ recommendations, it can be in the range 20–100 pF, 1%, ceramic SMD or through-hole capacitor. |
| Capacitor C2 | Optional output filtering capacitor. Depending on the input ripples during the charging process, it can be used within R-C first-order analog filter. |
| Current sense operational amplifier Ucs | A non-inverting amplifier with resistors , and the first-order filter , , connected to the current sense resistor are used. Due to its simplicity, it is not an object of this research. At this position other types of current sensing circuits, for example, Hall current sensing circuits can also be used successfully. |
| Power supply voltages. | The two power supply voltages on the primary and secondary side must be isolated. The auxiliary power supplies are usually Printed Circuit Board (PCB) DC-DC isolated converters [49] which can be used for low power electronic circuits. |
| Element According to Figure 2 and Figure 3 | Value | Notice |
|---|---|---|
| R1 | 100 Ω, | This value limits the LED current in the range 10–20 mA, according to the manufacturers’ requirements for the linear range of operation and the input voltage tolerance. |
| R2, R3 | 50 kΩ, | It has to be calculated from the presented design procedure according to the linear optocoupler parameters. In the experimental models, as Figure 9 shows, two multi-turns potentiometers by 50 kΩ have been used only for research purposes, but eventually, constant value resistors must be applied. Their precise values must be calculated according to Equations (24) and (25). |
| C1 | 20 pF, 16 V, | A ceramic capacitor, selected at 20 pF according to the manufacturers’ recommendations has been used for the first experiment. Eventually, its value has been increased for better stability. |
| C2 | 1–4.7 nF, 16 V | Ceramic capacitors in this range have been used for all conducted experiments. If necessary, their value can be reduced in order to reduce the time constant of the circuit. |
| U1, U3 | LM 358 | A general application operation optocoupler would be suitable for this purpose i.e., other types of low budget operational amplifiers are also acceptable. Here, an optocoupler designed specifically for unidirectional power supply has been chosen [50]. Their supply voltages (V1.1. and V2.1., Figure 2) have been set at 6 V to ensure that saturation at 4.2 V is avoided. |
| U2 | IL300 | Other types of linear optocouplers, as previously shown, have also been tested with the same results. The primary and secondary supply voltages for the photodiodes (V1.2. and V2.2., Figure 2) have been set at 5 V with two linear regulators (Figure 9). The presented equations: Equations (1)–(6), Equations (9)–(11), Equations (12)–(14), Equations (16)–(21) are the product of this research and have been derived with trend analysis for this linear optocoupler. For other optocouplers, the same approach can be used and different coefficients must be specified. However, the structure and the order of magnitude in the equations would be the same, as the optocouplers characteristics are similar. |
| Input Voltage | LED Current (mA) | Output Voltage | (mV) | Relative Error (%) |
|---|---|---|---|---|
| 2 | 9.18 | 2.001 | 1 | 0.05 |
| 2.2 | 10.09 | 2.203 | 3 | 0.136 |
| 2.4 | 11.01 | 2.409 | 9 | 0.375 |
| 2.6 | 11.91 | 2.61 | 10 | 0.384 |
| 2.8 | 12.83 | 2.809 | 9 | 0.321 |
| 3 | 13.74 | 3.01 | 10 | 0.33 |
| 3.2 | 14.66 | 3.207 | 7 | 0.219 |
| 3.4 | 15.57 | 3.408 | 8 | 0.235 |
| 3.6 | 16.49 | 3.61 | 10 | 0.278 |
| 3.8 | 17.41 | 3.81 | 10 | 0.263 |
| 4 | 18.32 | 4.01 | 10 | 0.25 |
| 4.2 | 19.25 | 4.21 | 10 | 0.238 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dimitrov, B.; Collier, G.; Cruden, A. Design and Experimental Verification of Voltage Measurement Circuits Based on Linear Optocouplers with Galvanic Isolation for Battery Management Systems. World Electr. Veh. J. 2019, 10, 59. https://doi.org/10.3390/wevj10040059
Dimitrov B, Collier G, Cruden A. Design and Experimental Verification of Voltage Measurement Circuits Based on Linear Optocouplers with Galvanic Isolation for Battery Management Systems. World Electric Vehicle Journal. 2019; 10(4):59. https://doi.org/10.3390/wevj10040059
Chicago/Turabian StyleDimitrov, Borislav, Gordana Collier, and Andrew Cruden. 2019. "Design and Experimental Verification of Voltage Measurement Circuits Based on Linear Optocouplers with Galvanic Isolation for Battery Management Systems" World Electric Vehicle Journal 10, no. 4: 59. https://doi.org/10.3390/wevj10040059
APA StyleDimitrov, B., Collier, G., & Cruden, A. (2019). Design and Experimental Verification of Voltage Measurement Circuits Based on Linear Optocouplers with Galvanic Isolation for Battery Management Systems. World Electric Vehicle Journal, 10(4), 59. https://doi.org/10.3390/wevj10040059