Real-World Driving Cycles Adaptability of Electric Vehicles

Abstract
:1. Introduction
2. Real-World Driving Cycles
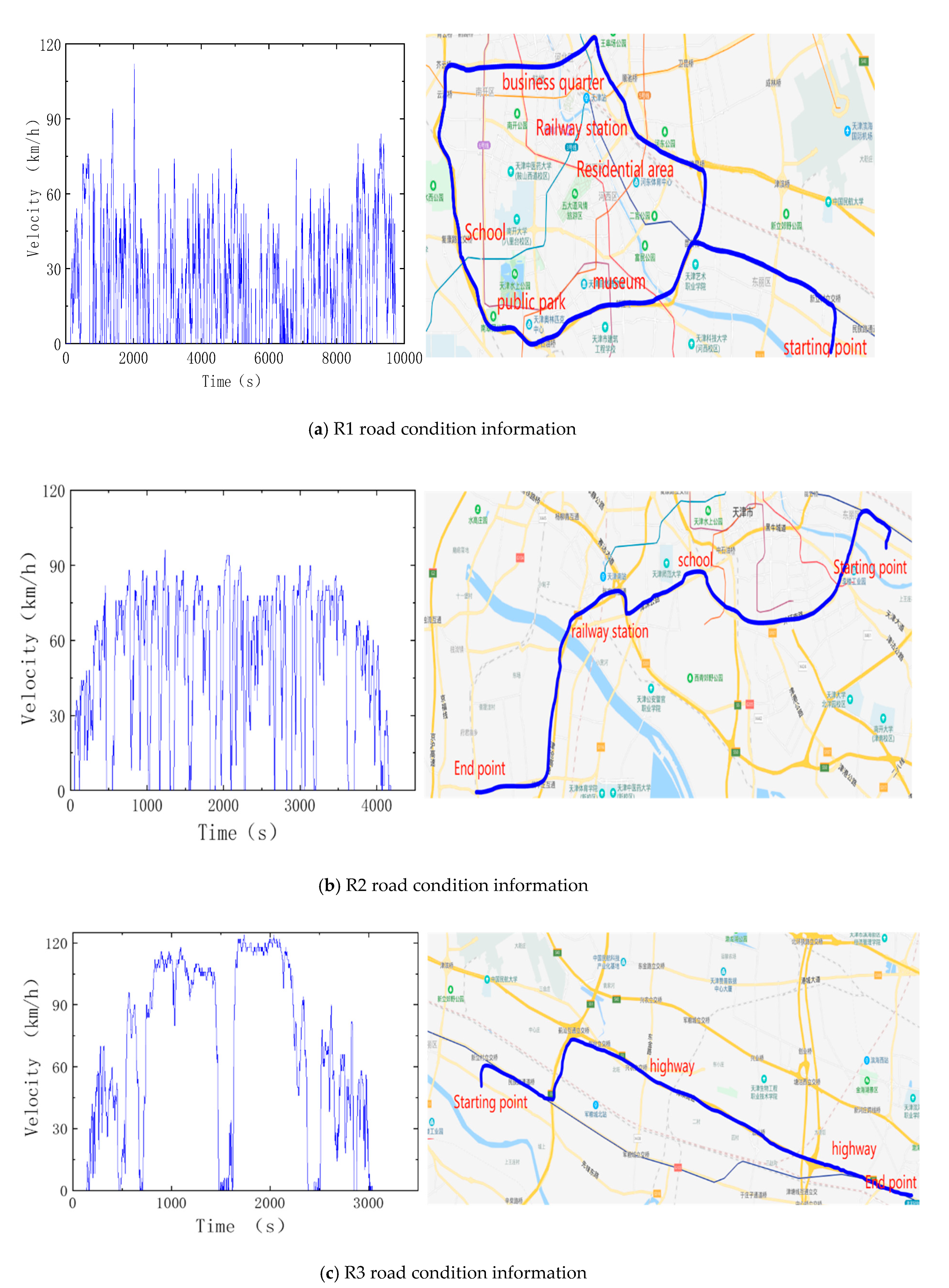
2.1. Collect Information of Real-World Driving Cycle
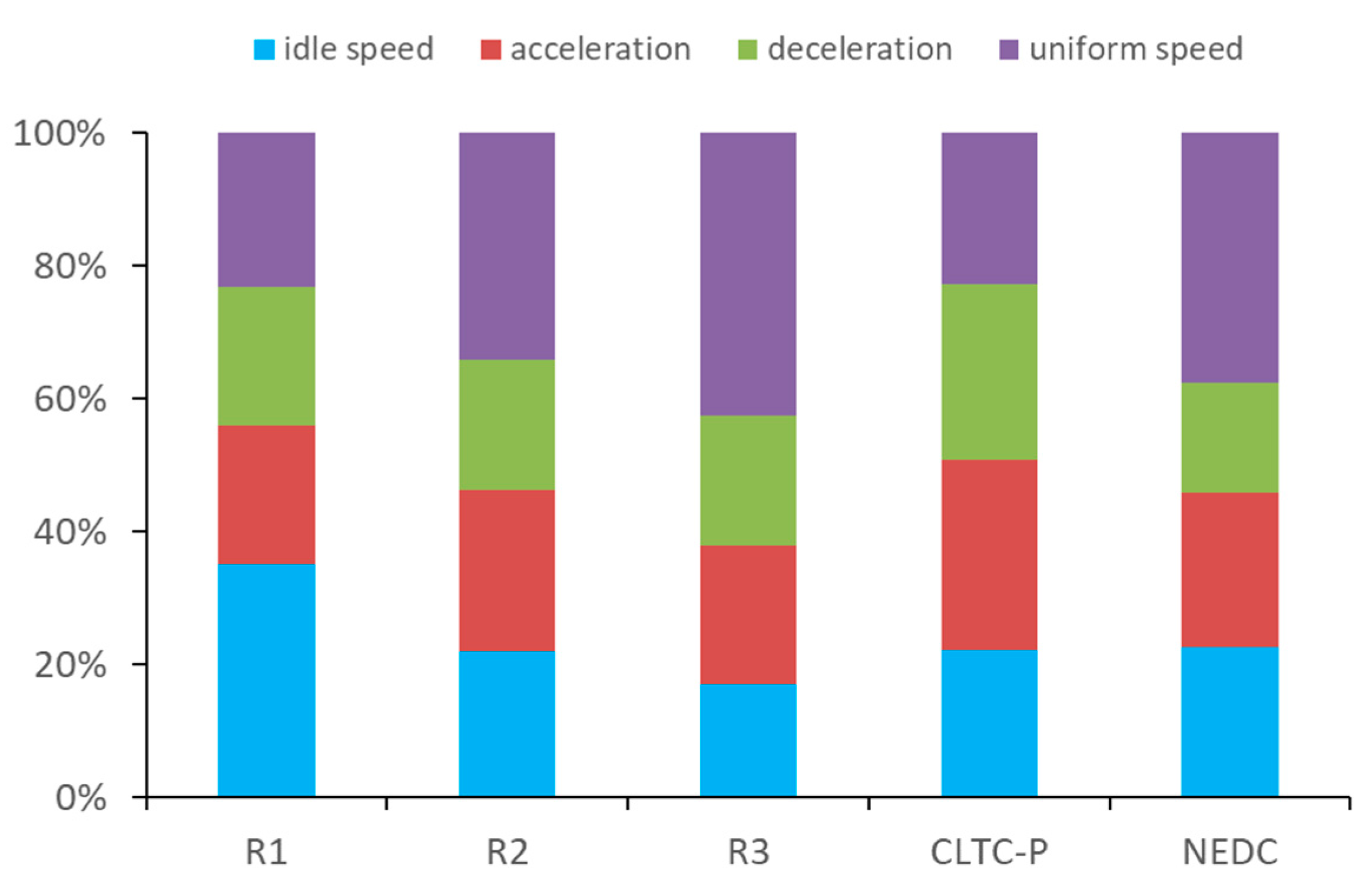
2.2. Characteristics of Real-World Driving Cycle
3. Mathematical Model of Vehicles
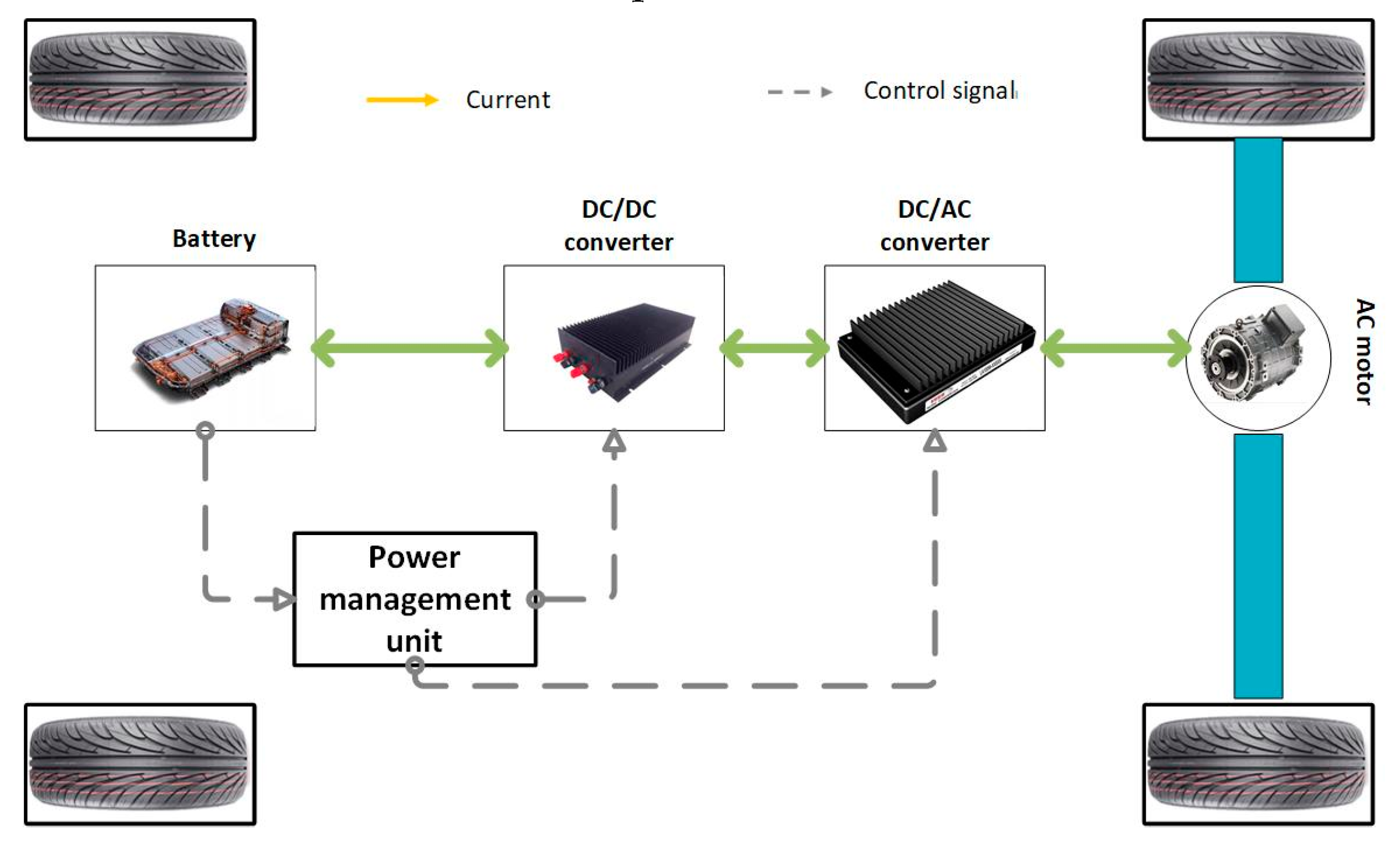
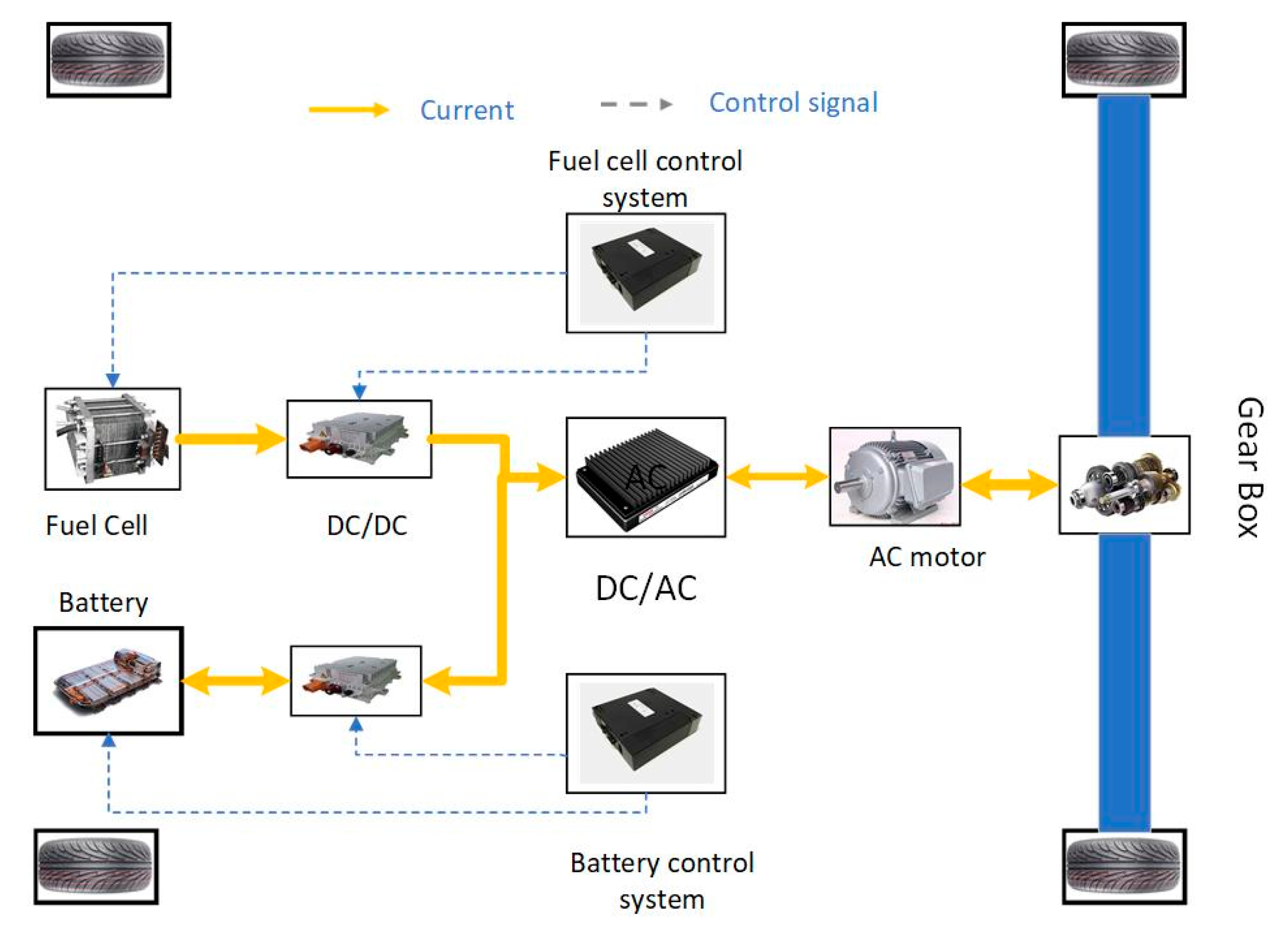
3.1. Power System Structure Model
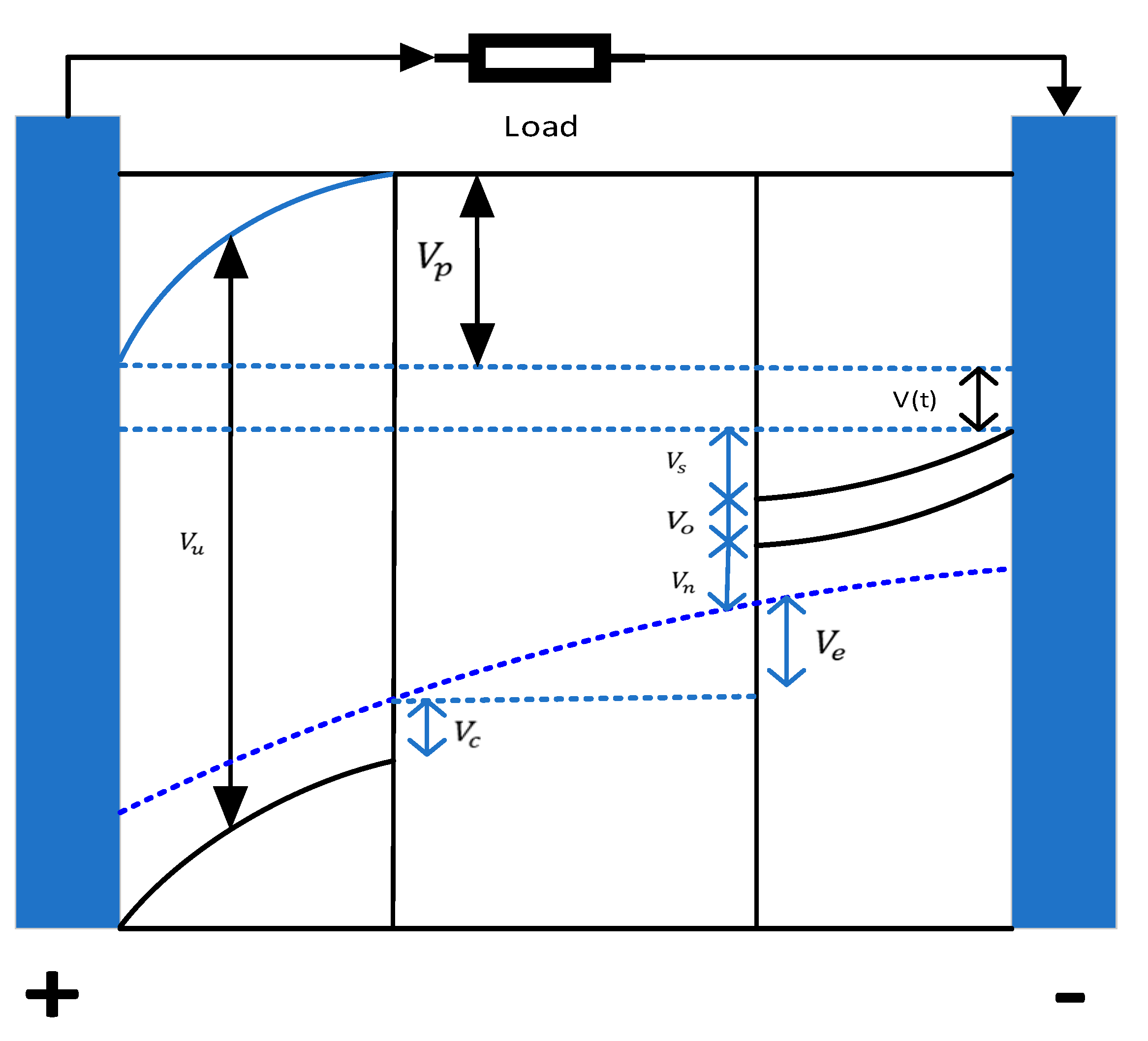
3.2. Lithium Battery Model
3.3. Proton Exchange Membrane Fuel-Cell Model
4. Model Validation
5. Results and Analysis
5.1. Simulation Results of Battery Electric Vehicle (BEV)
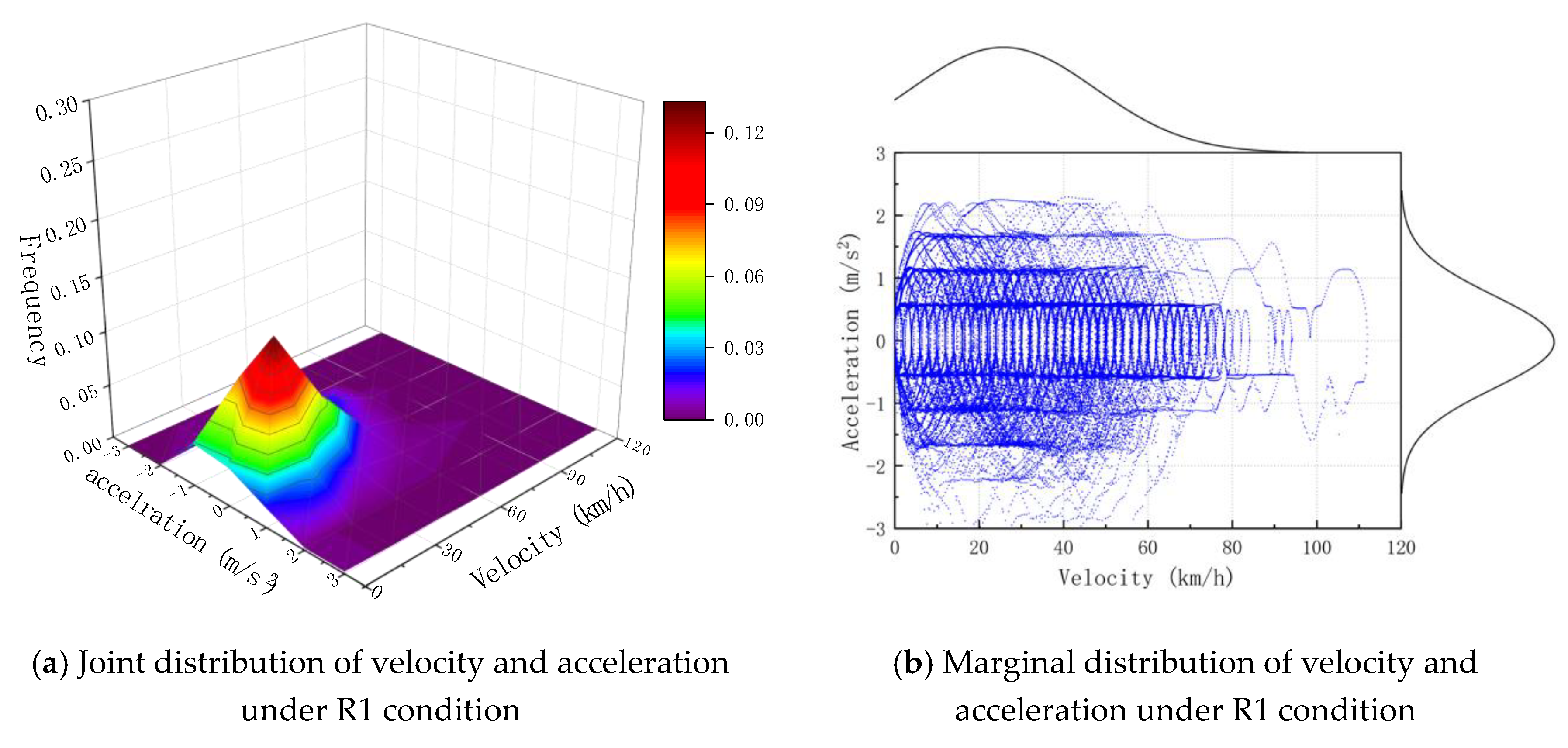
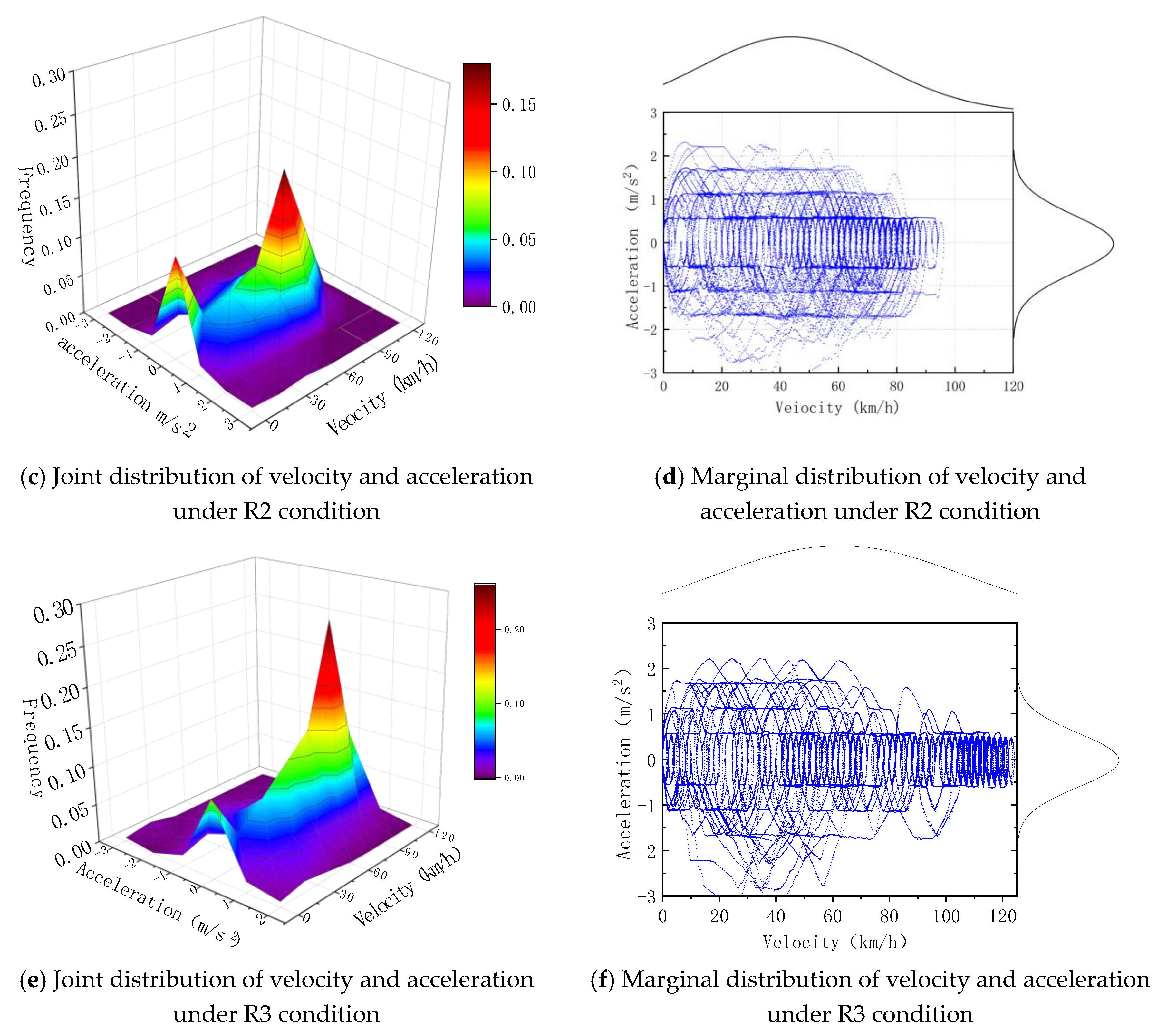
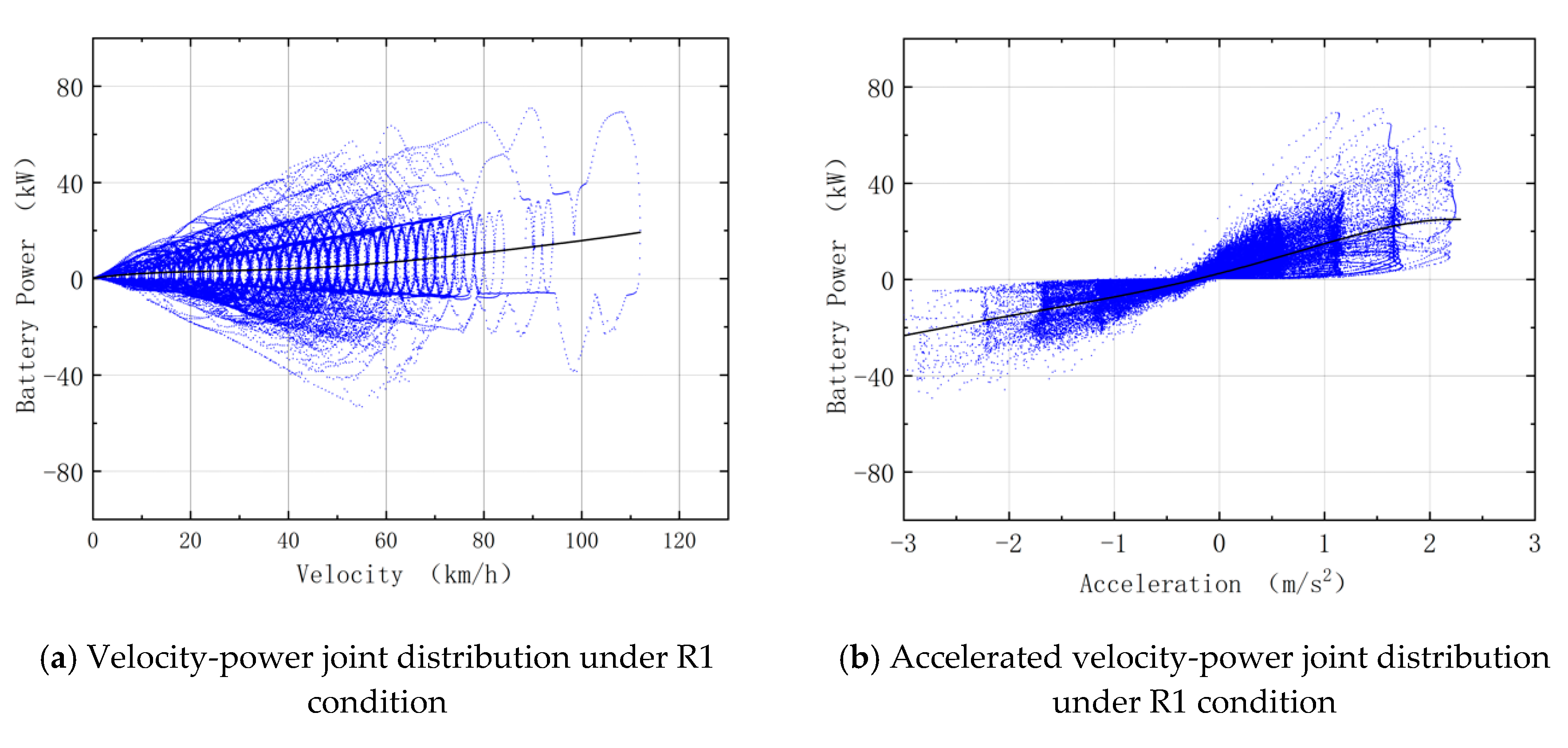
5.1.1. Joint Distribution of Velocity, Accelerated Velocity and Battery Power of BEV under Three Road Conditions
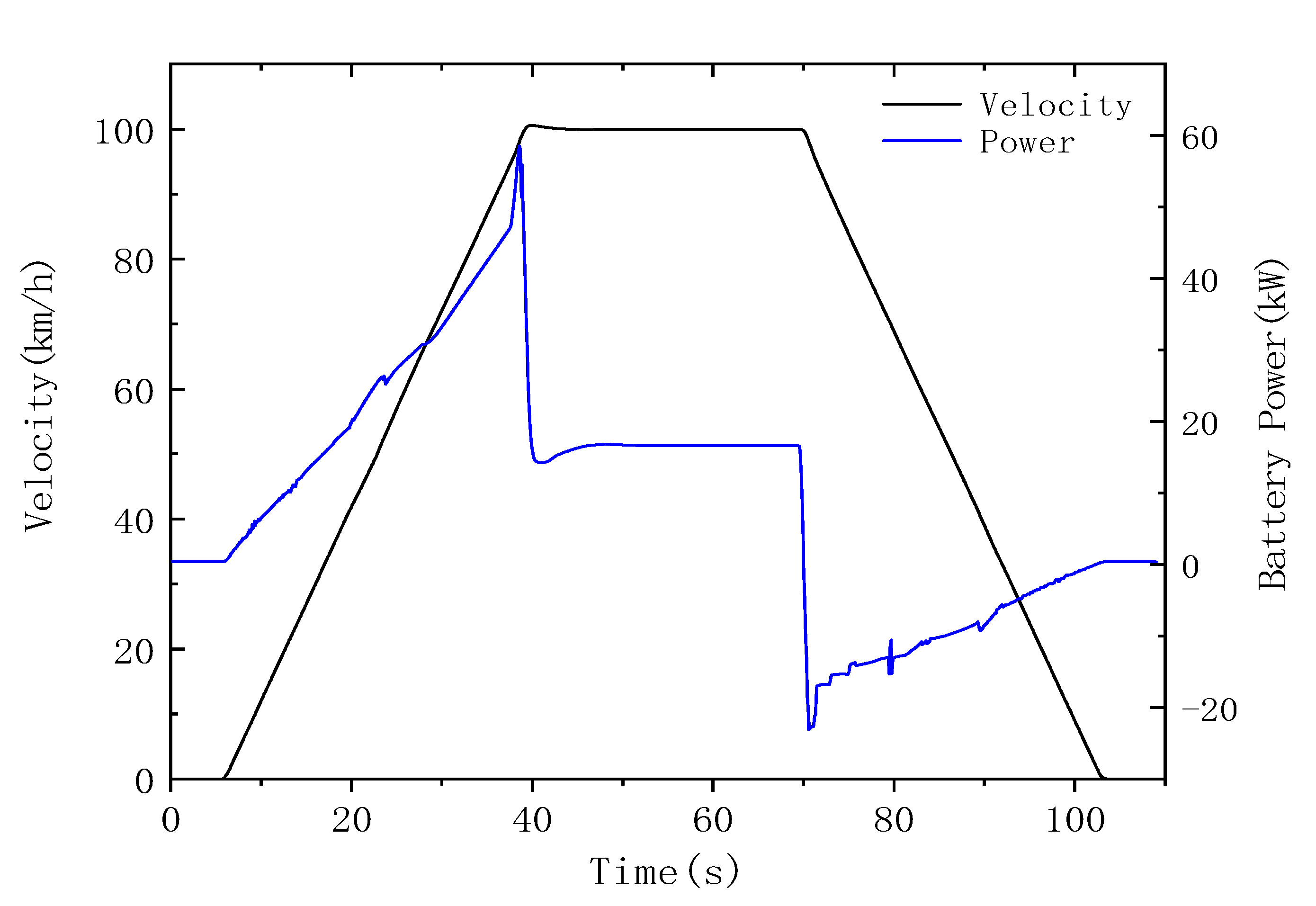
5.1.2. BEV 0–100 km/h Acceleration Performance Test
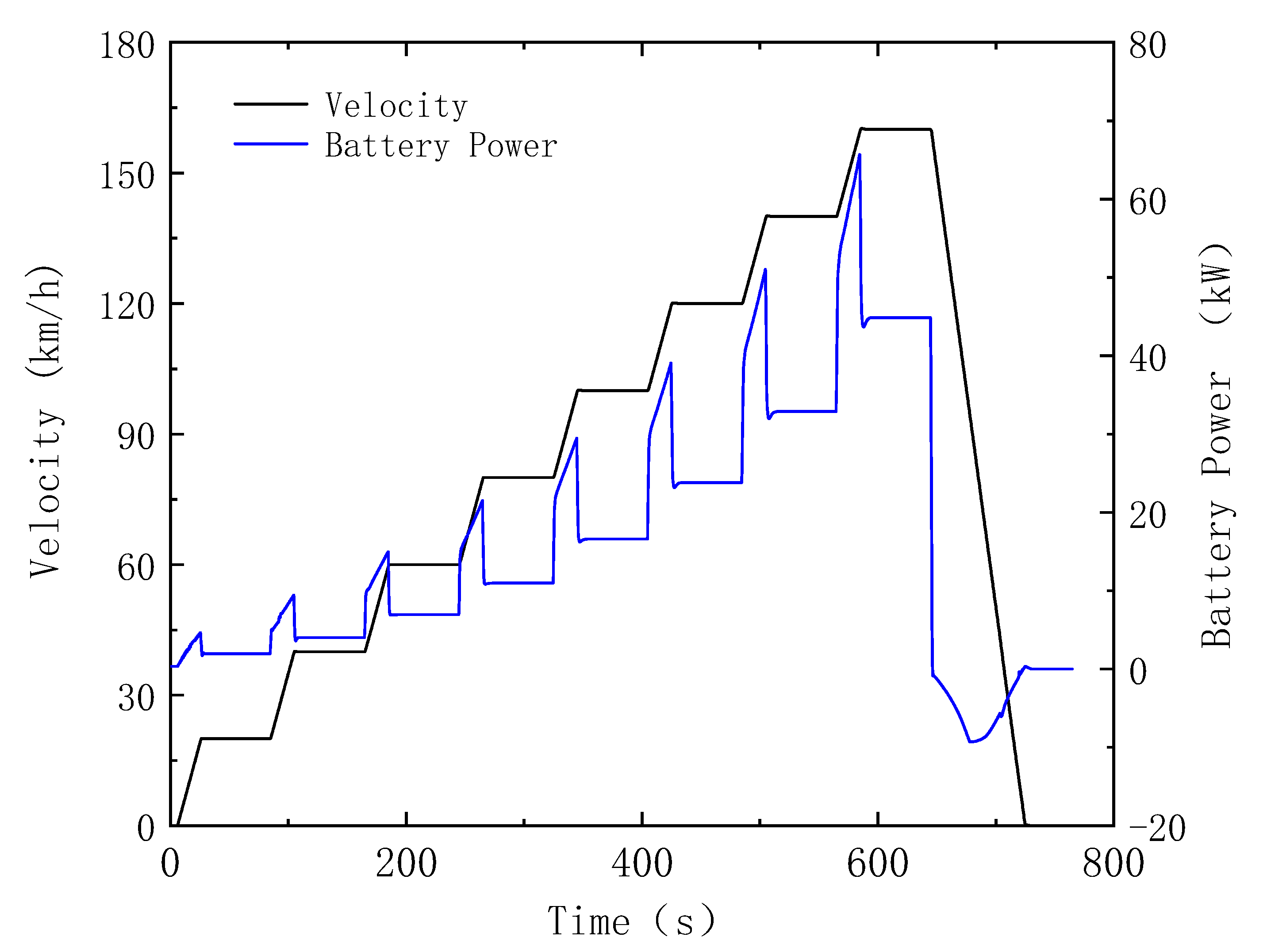
5.1.3. BEV Cruising Performance Test
5.2. Simulation Results of Fuel-Cell Vehicle (FCV)
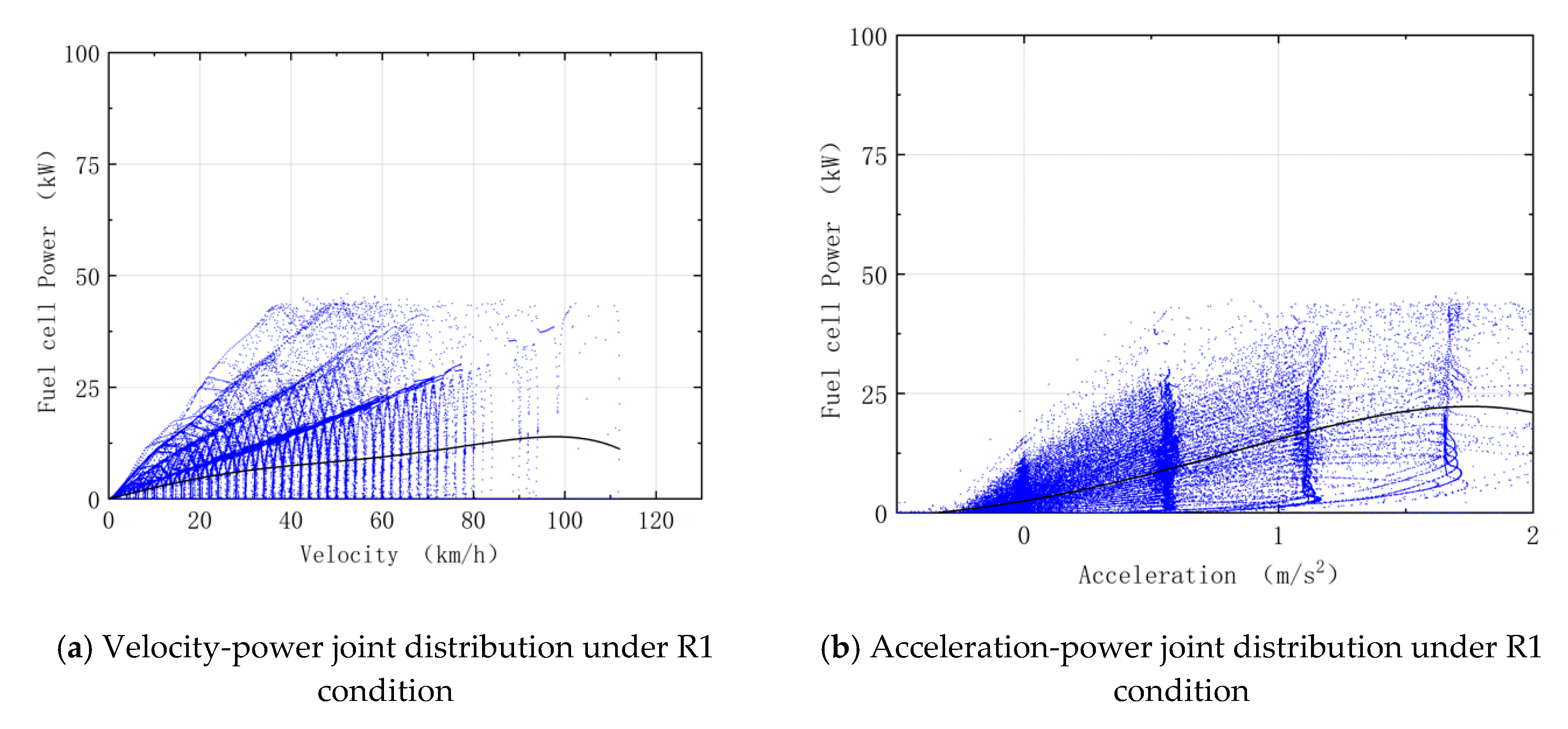
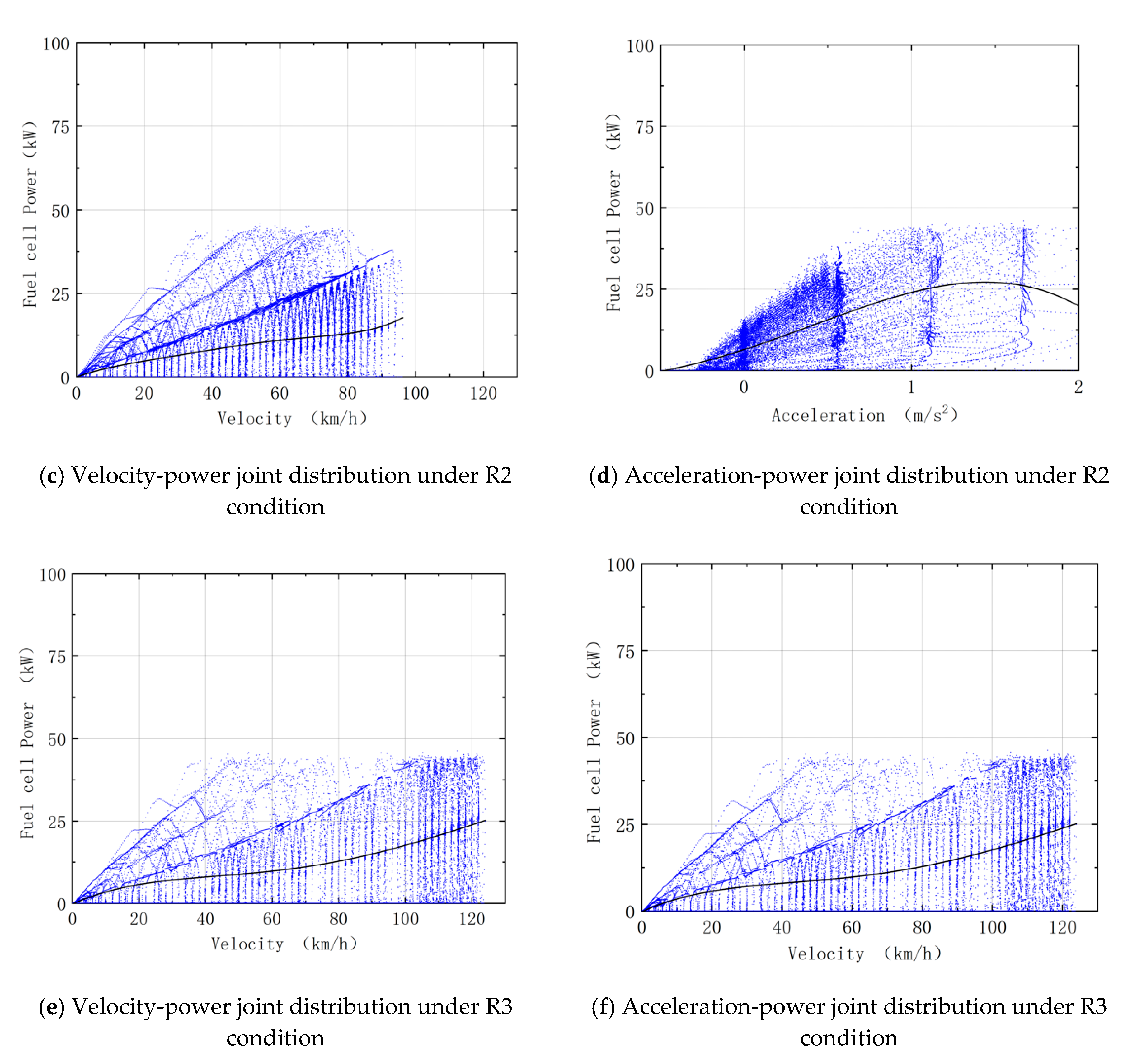
5.2.1. Joint Distribution of Velocity, Accelerated Velocity and Fuel-Cell Power of FCV under Three Road Conditions
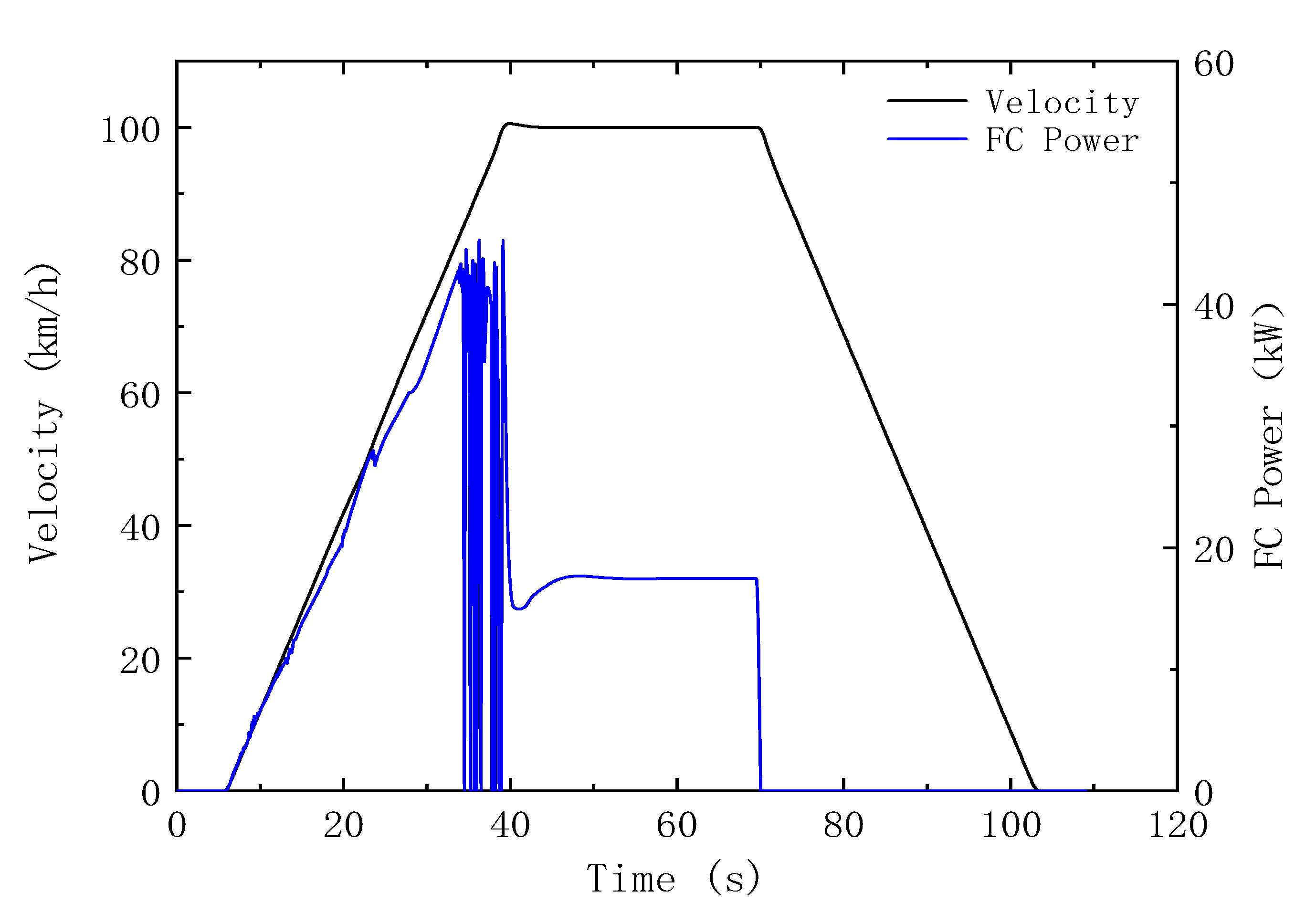
5.2.2. 0–100 km/h Acceleration Performance Test
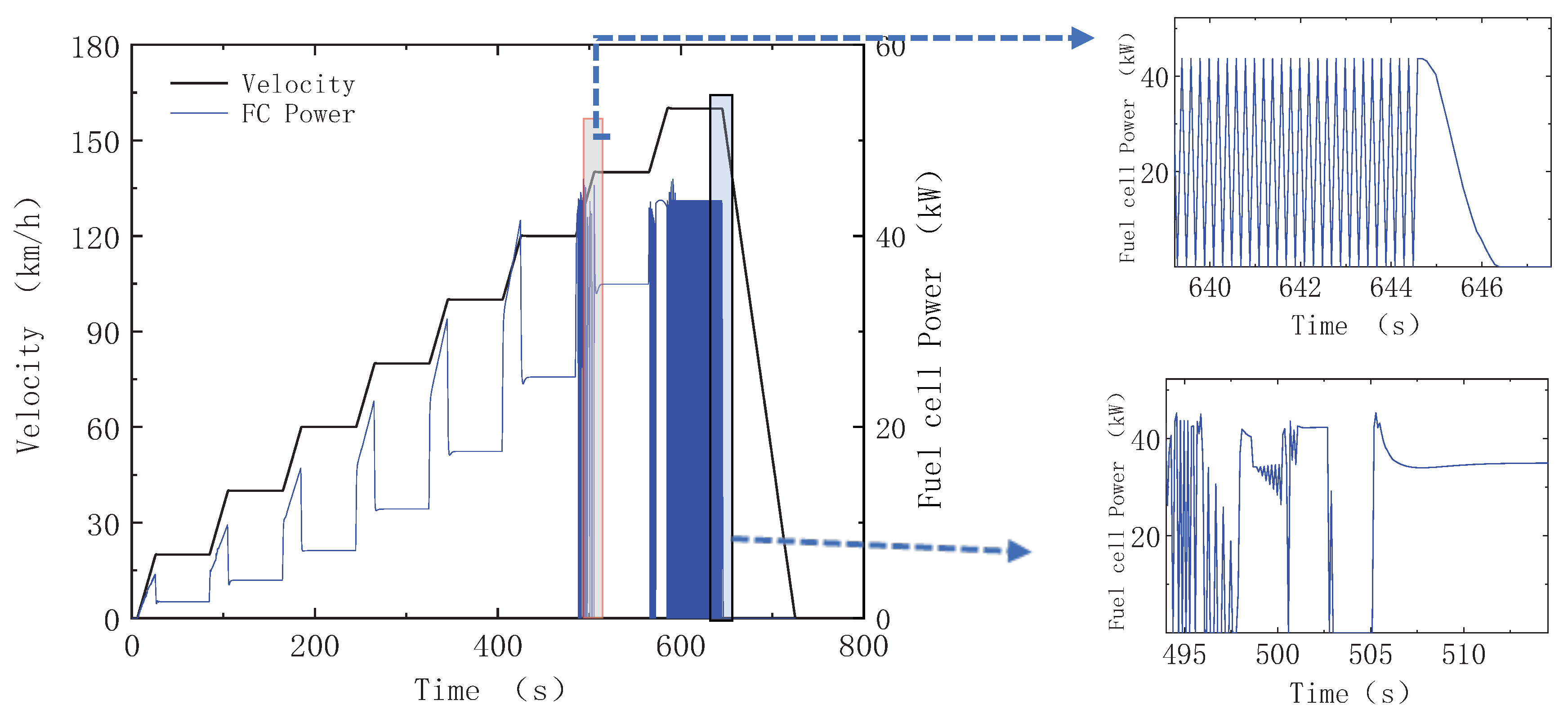
5.2.3. FCV Cruising Performance Test
5.3. Test Results of Fuel-Cell Hybrid Electric Vehicle (FCHEV)
5.3.1. New European Driving Cycle (NEDC) Condition
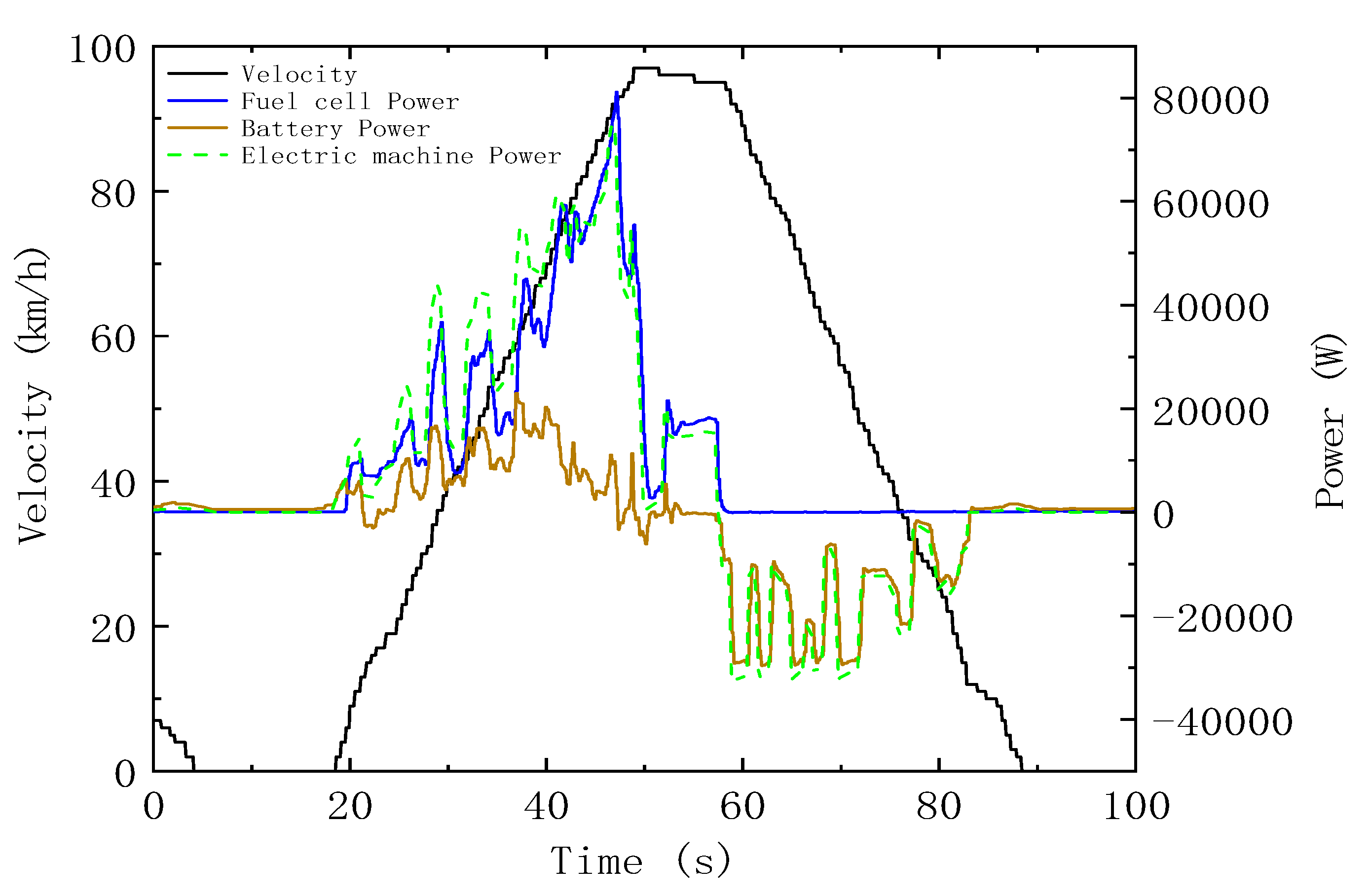
5.3.2. 0–100 km/h Acceleration Performance
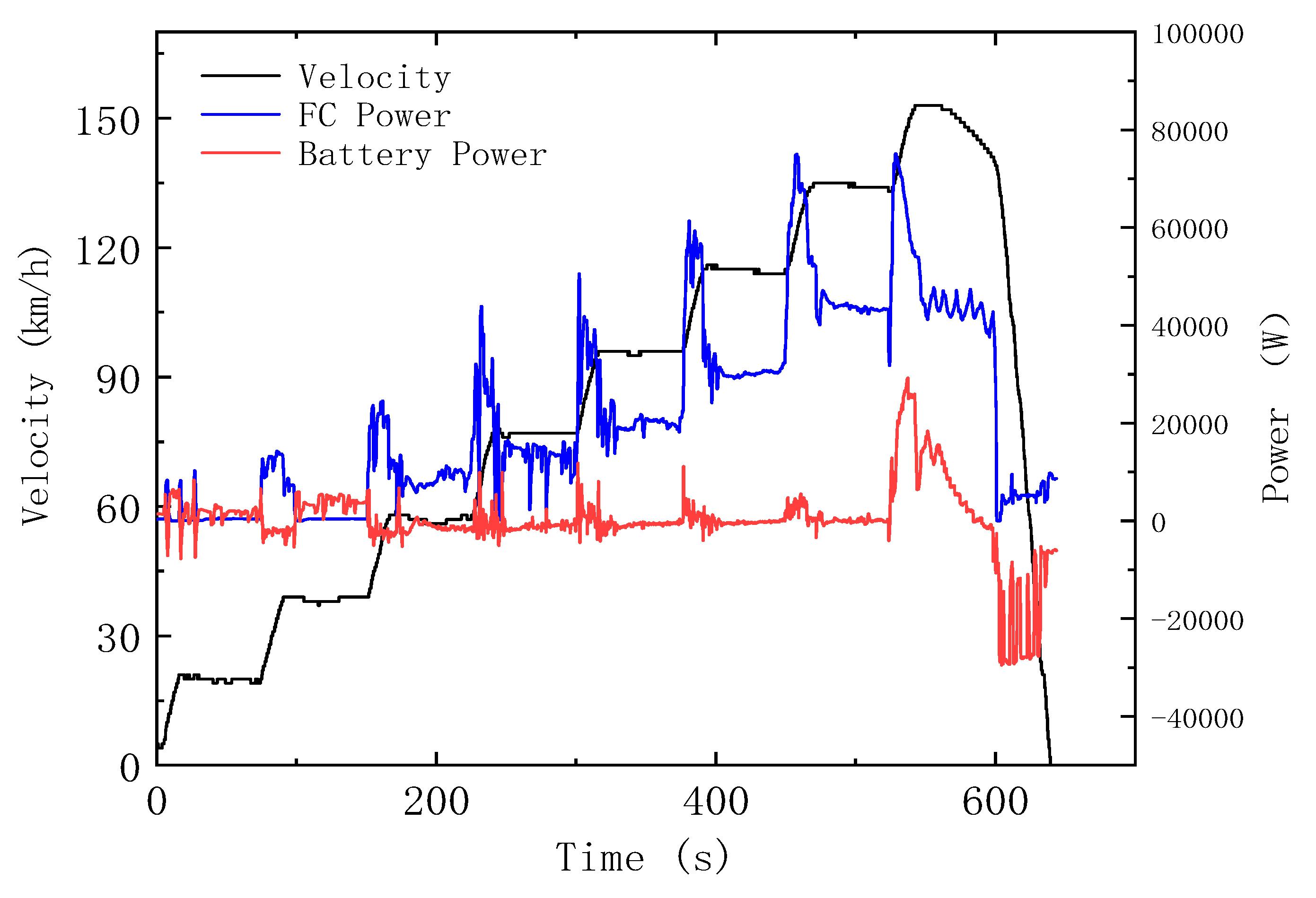
5.3.3. FCHEV Cruising Performance Test
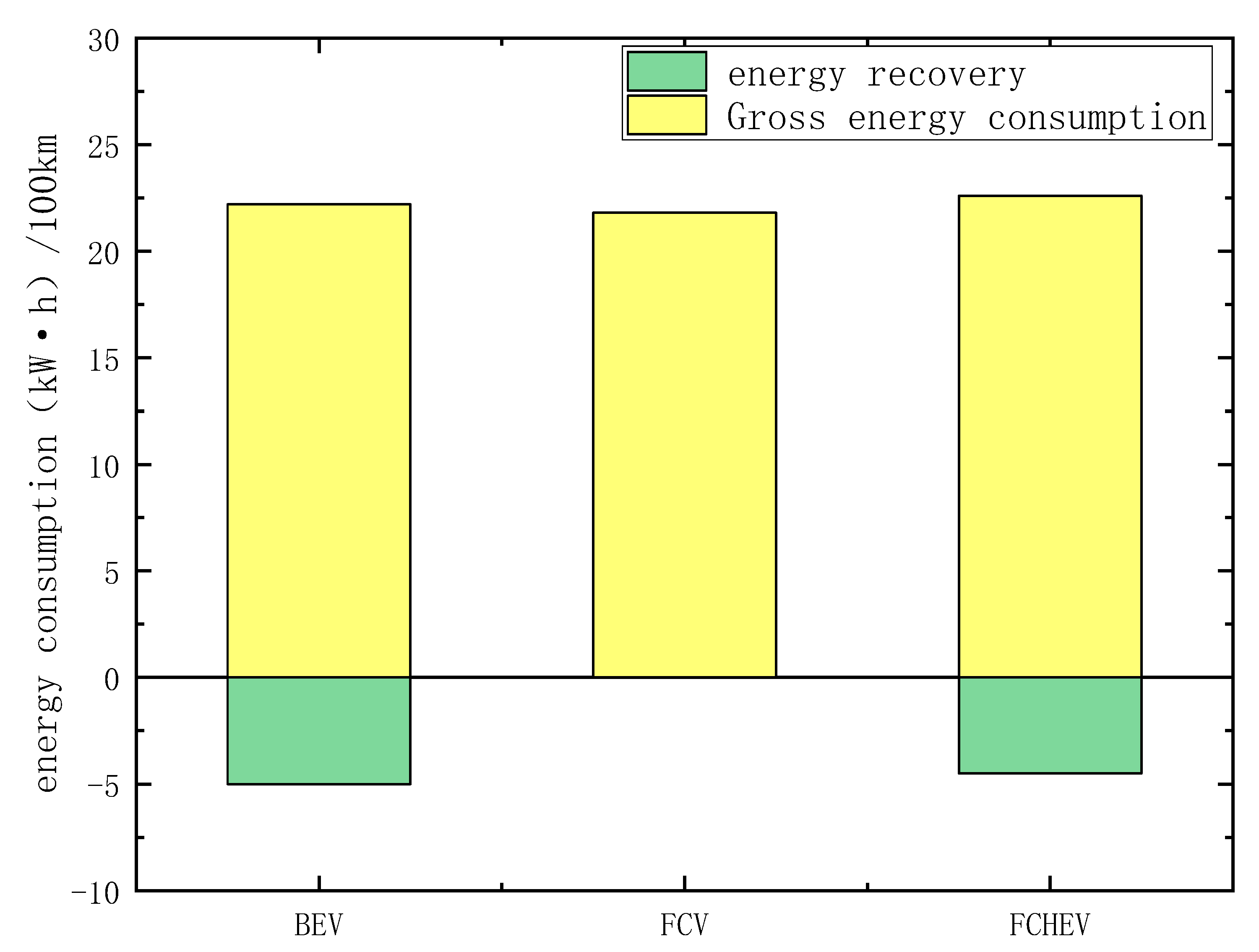
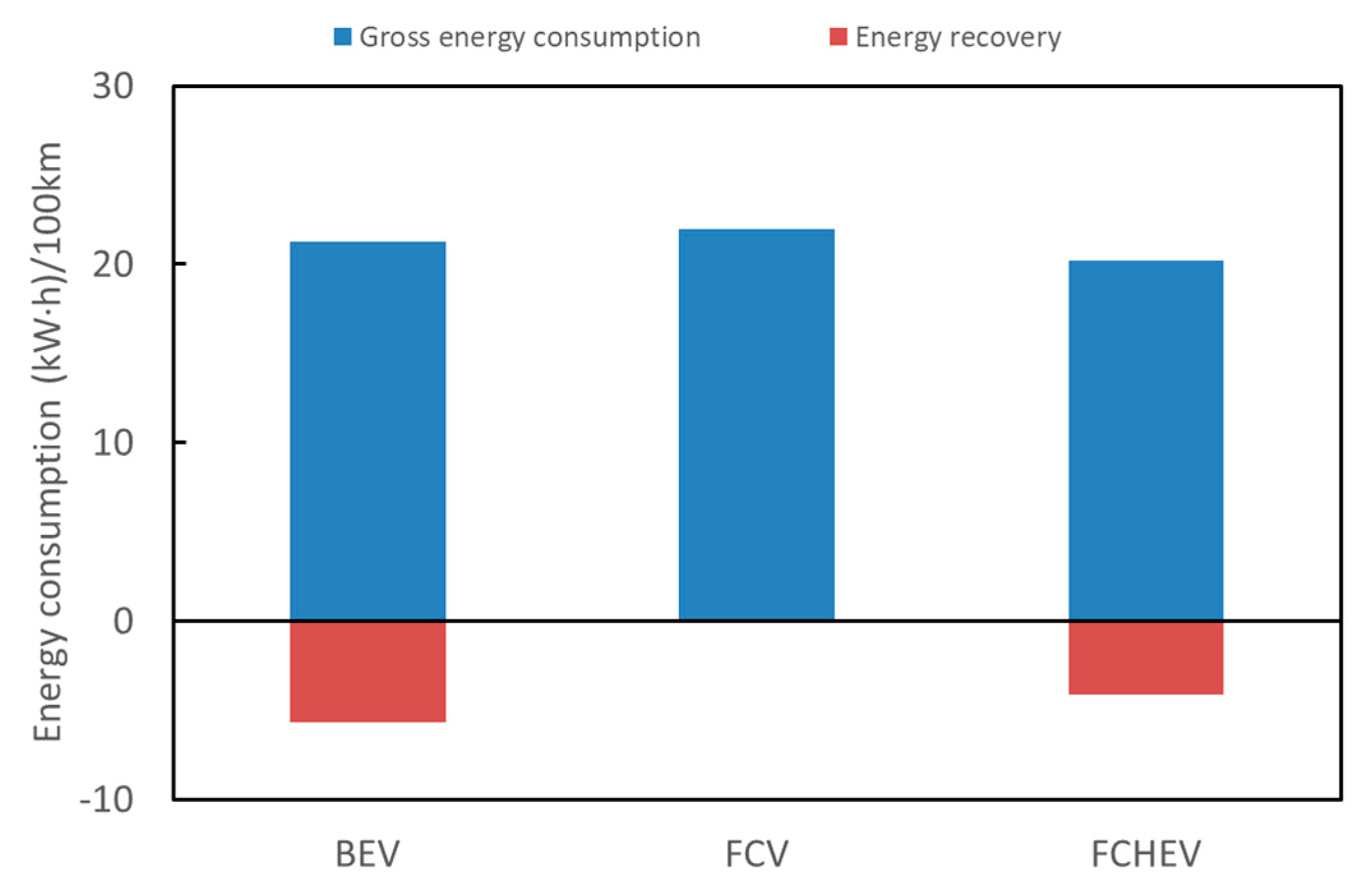
5.3.4. Energy Consumption
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Song, Y.; Zhang, M.; Sun, R. Using a new aggregated indicator to evaluate China’s energy security. Energy Policy 2019, 132, 167–174. [Google Scholar] [CrossRef]
- Das, H.S.; Tan, C.W.; Yatim, A.H.M. Fuel cell hybrid electric vehicles: A review on power conditioning units and topologies. Renew. Sustain. Energy Rev. 2017, 76, 268–291. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, F.; Ke, X.; Liu, Z.; Yuan, C. Predictive modeling of energy consumption and greenhouse gas emissions from autonomous electric vehicle operations. Appl. Energy 2019. [Google Scholar] [CrossRef]
- Zhili, D.; Boqiang, L.; Chunxu, G. Development path of electric vehicles in China under environmental and energy security constraints. Resour. Conserv. Recycl. 2019, 143, 17–26. [Google Scholar] [CrossRef]
- Li, Y.; Zhong, Z.; Zhang, K.; Zheng, T. A car-following model for electric vehicle traffic flow based on optimal energy consumption. Phys. A Stat. Mech. Its Appl. 2019. [Google Scholar] [CrossRef]
- Pagani, M.; Korosec, W.; Chokani, N.; Abhari, R.S. User behaviour and electric vehicle charging infrastructure: An agent-based model assessment. Appl. Energy 2019. [Google Scholar] [CrossRef]
- Du, J.; Ouyang, D. Progress of Chinese electric vehicles industrialization in 2015: A review. Appl. Energy 2017, 188, 529–546. [Google Scholar] [CrossRef]
- Berecibar, M.; Gandiaga, I.; Villarreal, I.; Omar, N.; van Mierlo, J.; Van den Bossche, P. Critical review of state of health estimation methods of Li-ion batteries for real applications. Renew. Sustain. Energy Rev. 2016, 56, 572–587. [Google Scholar] [CrossRef]
- Albanese, L.; Ciriminna, R.; Meneguzzo, F.; Pagliaro, M. The impact of electric vehicles on the power market. Energy Sci. Eng. 2015, 3, 300–309. [Google Scholar] [CrossRef]
- Ballinger, B.; Stringer, M.; Schmeda-Lopez, D.R.; Kefford, B.; Parkinson, B.; Greig, C.; Smart, S. The vulnerability of electric vehicle deployment to critical mineral supply. Appl. Energy 2019, 255, 113844. [Google Scholar] [CrossRef]
- Naumanen, M.; Uusitalo, T.; Huttunen-Saarivirta, E.; van der Have, R. Development strategies for heavy duty electric battery vehicles: Comparison between China, EU, Japan and USA. Resour. Conserv. Recycl. 2019. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel fuel cell/battery/supercapacitor hybrid power source for fuel cell hybrid electric vehicles. Energy 2018, 143, 467–477. [Google Scholar] [CrossRef]
- Fathabadi, H. Fuel cell hybrid electric vehicle (FCHEV): Novel fuel cell/SC hybrid power generation system. Energy Convers. Manag. 2018, 156, 192–201. [Google Scholar] [CrossRef]
- Harvey, L.D.D. Cost and energy performance of advanced light duty vehicles: Implications for standards and subsidies. Energy Policy 2018, 114, 1–12. [Google Scholar] [CrossRef]
- Xu, X.; Aziz, H.M.A.; Guensler, R. A modal-based approach for estimating electric vehicle energy consumption in transportation networks. Transp. Res. Part D Transp. Environ. 2019, 75, 249–264. [Google Scholar] [CrossRef]
- Wu, X.; Freese, D.; Cabrera, A.; Kitch, W.A. Electric vehicles’ energy consumption measurement and estimation. Transp. Res. Part D Transp. Environ. 2015, 34, 52–67. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, C.; Hong, G.; Huang, X.; Li, L. Method for evaluating the real-world driving energy consumptions of electric vehicles. Energy 2017, 141, 1955–1968. [Google Scholar] [CrossRef]
- Brady, J.; O’Mahony, M. Development of a driving cycle to evaluate the energy economy of electric vehicles in urban areas. Appl. Energy 2016, 177, 165–178. [Google Scholar] [CrossRef]
- Faria, M.; Rolim, C.; Duarte, G.; Farias, T.; Baptista, P. Assessing energy consumption impacts of traffic shifts based on real-world driving data. Transp. Res. Part D Transp. Environ. 2018, 62, 489–507. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, C.; Zhang, C.; Bai, H.; Xu, L. Adaptive estimation of road slope and vehicle mass of fuel cell vehicle. eTransportation 2019. [Google Scholar] [CrossRef]
- Fernández, R.Á.; Caraballo, S.C.; Cilleruelo, F.B.; Lozano, J.A. Fuel optimization strategy for hydrogen fuel cell range extender vehicles applying genetic algorithms. Renew. Sustain. Energy Rev. 2018, 81, 655–668. [Google Scholar] [CrossRef]
- Mokrani, Z.; Rekioua, D.; Mebarki, N.; Rekioua, T.; Bacha, S. Proposed energy management strategy in electric vehicle for recovering power excess produced by fuel cells. Int. J. Hydrogen Energy 2017, 42, 19556–19575. [Google Scholar] [CrossRef]
- Morrison, G.; Stevens, J.; Joseck, F. Relative economic competitiveness of light-duty battery electric and fuel cell electric vehicles. Transp. Res. Part C Emerg. Technol. 2018, 87, 183–196. [Google Scholar] [CrossRef]
- Carey, A.M.; Paige, G.B.; Carr, B.J.; Dogan, M. Forward modeling to investigate inversion artifacts resulting from time-lapse electrical resistivity tomography during rainfall simulations. J. Appl. Geophys. 2017, 145, 39–49. [Google Scholar] [CrossRef]
- Sepúlveda, F.D.; Lucay, F.; González, J.F.; Cisternas, L.A.; Gálvez, E.D. A methodology for the conceptual design of flotation circuits by combining group contribution, local/global sensitivity analysis, and reverse simulation. Int. J. Miner. Process. 2017, 164, 56–66. [Google Scholar] [CrossRef]
- Lekshmi, S.; Lal Priya, P.S. Mathematical modeling of Electric vehicles—A survey. Control Eng. Pract. 2019, 92, 104138. [Google Scholar]
- Liu, H.; Zhang, X.; Chen, Y.; Taha, M.; Xu, H. Active damping of driveline vibration in power-split hybrid vehicles based on model reference control. Control Eng. Pract. 2019. [Google Scholar] [CrossRef]
- Karaoğlan, M.U.; İnce, A.C.; Colpan, C.O.; Glüsen, A.; Kuralay, N.S.; Müller, M.; Stolten, D. Simulation of a hybrid vehicle powertrain having direct methanol fuel cell system through a semi-theoretical approach. Int. J. Hydrogen Energy 2019, 44, 18981–18992. [Google Scholar] [CrossRef]
- Zhou, X.; Qin, D.; Hu, J. Multi-objective optimization design and performance evaluation for plug-in hybrid electric vehicle powertrains. Appl. Energy 2017, 208, 1608–1625. [Google Scholar] [CrossRef]
- Richardson, R.R.; Osborne, M.A.; Howey, D.A. Gaussian process regression for forecasting battery state of health. J. Power Sources 2017, 357, 209–219. [Google Scholar] [CrossRef]
- Wilke, C.; Bensmann, A.; Martin, S.; Utz, A.; Hanke-Rauschenbach, R. Optimal design of a district energy system including supply for fuel cell electric vehicles. Appl. Energy 2018, 226, 129–144. [Google Scholar] [CrossRef]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. A novel equivalent consumption minimization strategy for hybrid electric vehicle powered by fuel cell, battery and supercapacitor. J. Power Sources 2018, 395, 262–270. [Google Scholar] [CrossRef]
- Kim, J.; Kim, M.; Kang, T.; Sohn, Y.-J.; Song, T.; Choi, K.H. Degradation modeling and operational optimization for improving the lifetime of high-temperature PEM (proton exchange membrane) fuel cells. Energy 2014, 66, 41–49. [Google Scholar] [CrossRef]
- Ahmadi, S.; Bathaee, S.M.T. Multi-objective genetic optimization of the fuel cell hybrid vehicle supervisory system: Fuzzy logic and operating mode control strategies. Int. J. Hydrogen Energy 2015, 40, 12512–12521. [Google Scholar] [CrossRef]
- Fadel, A.; Zhou, B. An experimental and analytical comparison study of power management methodologies of fuel cell–battery hybrid vehicles. J. Power Sources 2011, 196, 3271–3279. [Google Scholar] [CrossRef]
- Lachhab, I.; Krichen, L. An improved energy management strategy for FC/UC hybrid electric vehicles propelled by motor-wheels. Int. J. Hydrogen Energy 2014, 39, 571–581. [Google Scholar] [CrossRef]
- Aouzellag, H.; Ghedamsi, K.; Aouzellag, D. Energy management and fault tolerant control strategies for fuel cell/ultra-capacitor hybrid electric vehicles to enhance autonomy, efficiency and life time of the fuel cell system. Int. J. Hydrogen Energy 2015, 40, 7204–7213. [Google Scholar] [CrossRef]
- Li, T.; Huang, L.; Liu, H. Energy management and economic analysis for a fuel cell supercapacitor excavator. Energy 2019, 172, 840–851. [Google Scholar] [CrossRef]
- Hwang, J.-J.; Hu, J.-S.; Lin, C.-H. Design of a range extension strategy for power decentralized fuel cell/battery electric vehicles. Int. J. Hydrogen Energy 2015, 40, 11704–11712. [Google Scholar] [CrossRef]
- Wan, Y.; Guan, J.; Xu, S. Improved empirical parameters design method for centrifugal compressor in PEM fuel cell vehicle application. Int. J. Hydrogen Energy 2017, 42, 5590–5605. [Google Scholar] [CrossRef]
- Li, Y.; Wu, Y.; Zhang, Y.; Wang, S. A Kriging-based bi-objective constrained optimization method for fuel economy of hydrogen fuel cell vehicle. Int. J. Hydrogen Energy 2019. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Overall height | 1537 mm |
| Overall width | 1816 mm |
| Overall length | 4890 mm |
| Curb weight | 1848 kg |
| Hydrogen tank volume | 122.4 L |
| Maximum power | 114 kW |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Wen, Z.; Zhao, X.; Yang, Y.; Li, S. Real-World Driving Cycles Adaptability of Electric Vehicles. World Electr. Veh. J. 2020, 11, 19. https://doi.org/10.3390/wevj11010019
Sun Z, Wen Z, Zhao X, Yang Y, Li S. Real-World Driving Cycles Adaptability of Electric Vehicles. World Electric Vehicle Journal. 2020; 11(1):19. https://doi.org/10.3390/wevj11010019
Chicago/Turabian StyleSun, Zhicheng, Zui Wen, Xin Zhao, Yunpeng Yang, and Su Li. 2020. "Real-World Driving Cycles Adaptability of Electric Vehicles" World Electric Vehicle Journal 11, no. 1: 19. https://doi.org/10.3390/wevj11010019
APA StyleSun, Z., Wen, Z., Zhao, X., Yang, Y., & Li, S. (2020). Real-World Driving Cycles Adaptability of Electric Vehicles. World Electric Vehicle Journal, 11(1), 19. https://doi.org/10.3390/wevj11010019