Control of Dual-Output DC/DC Converters Using Duty Cycle and Frequency

Abstract
:1. Introduction
1.1. Research Motivations
1.2. Literature Review
1.3. Contribution
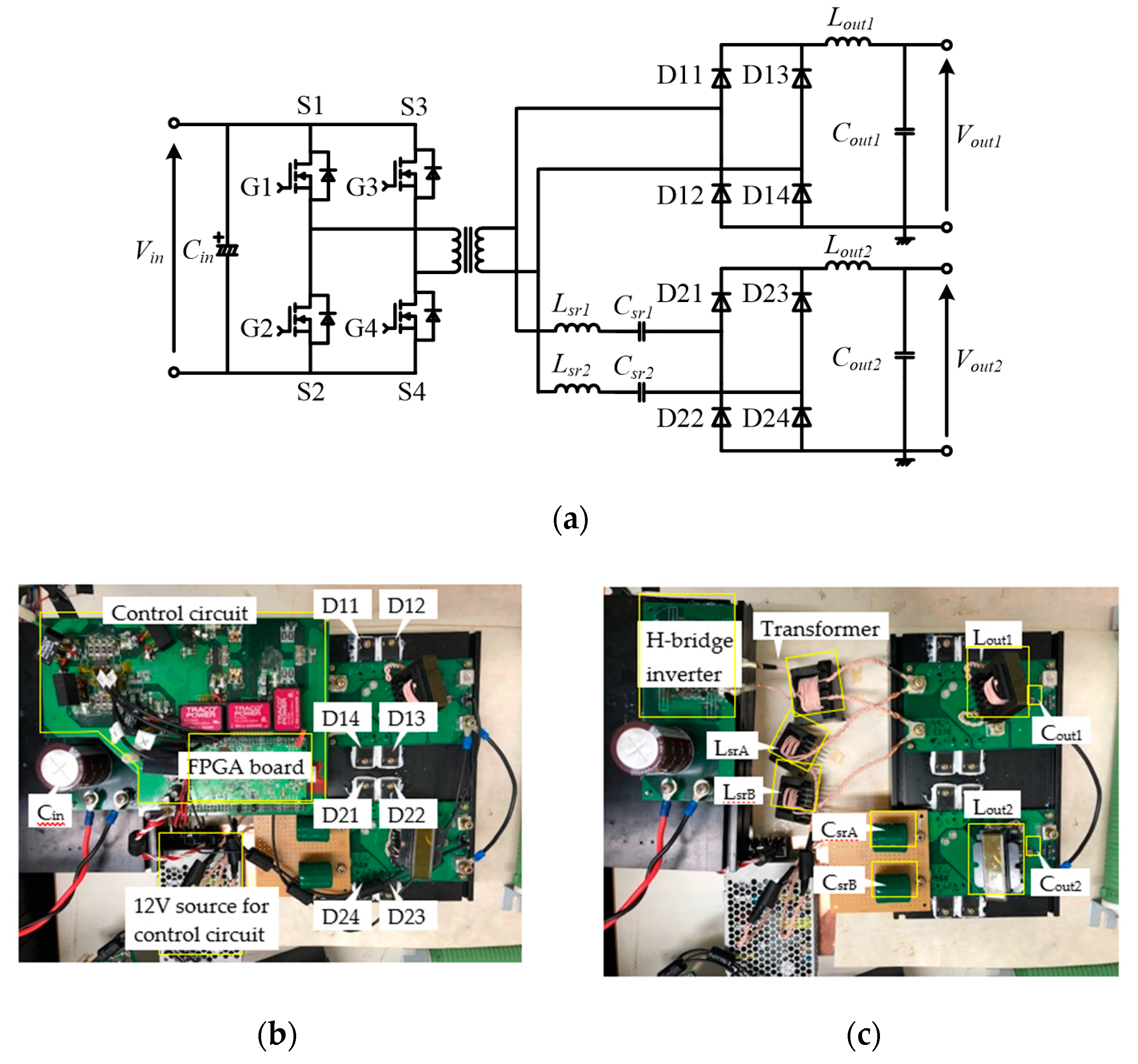
2. Overview of Proposed Control Method and Main Circuit Configuration
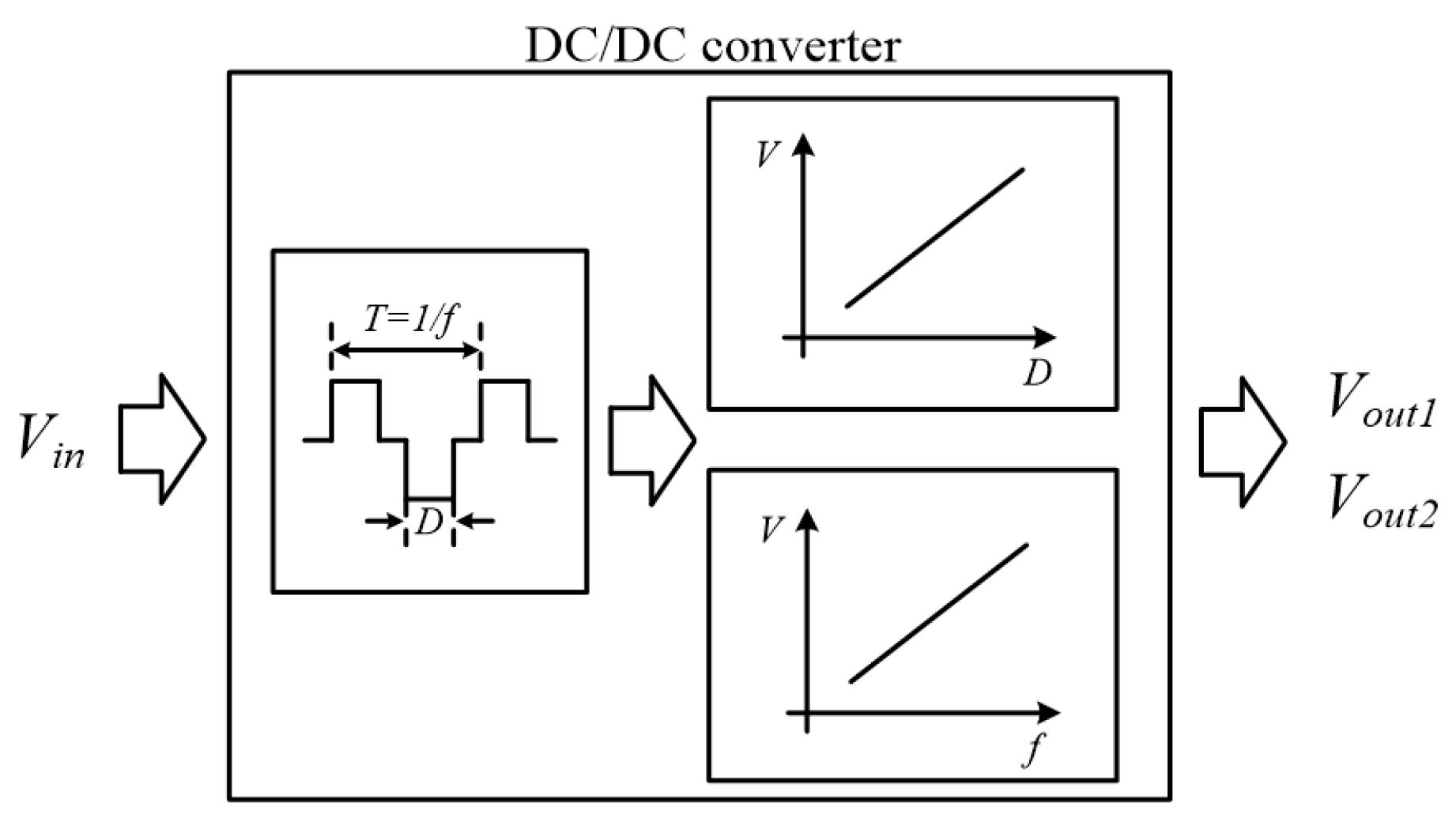
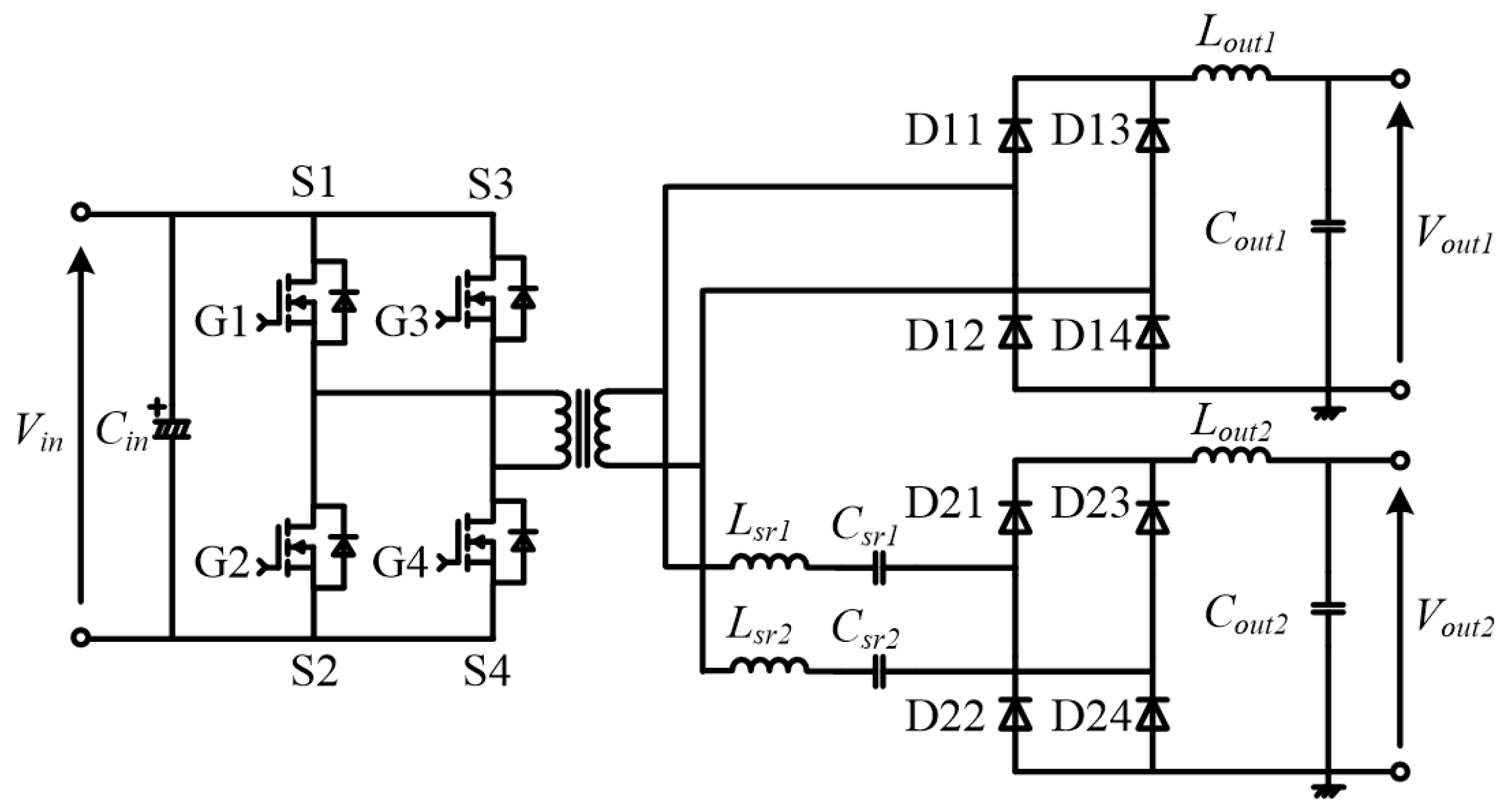
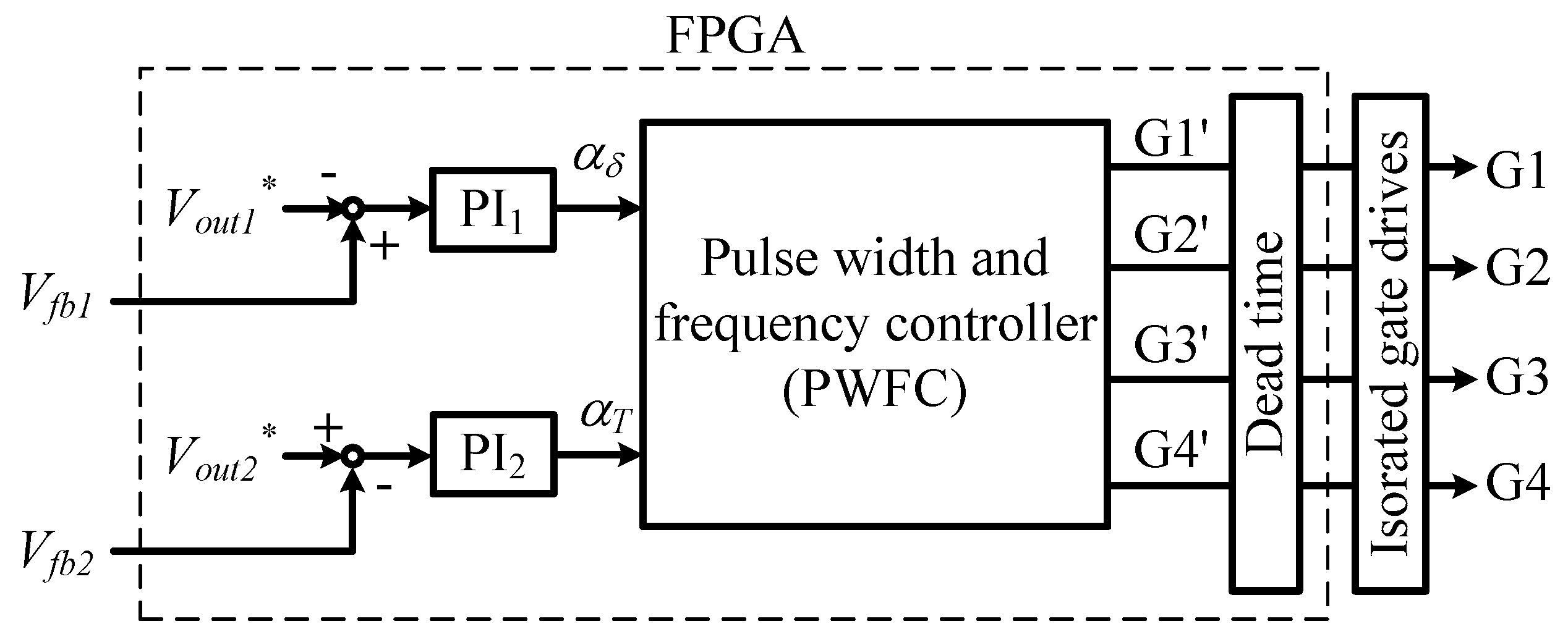
2.1. Overview of Proposed Control Method and Main Circuit Configuration
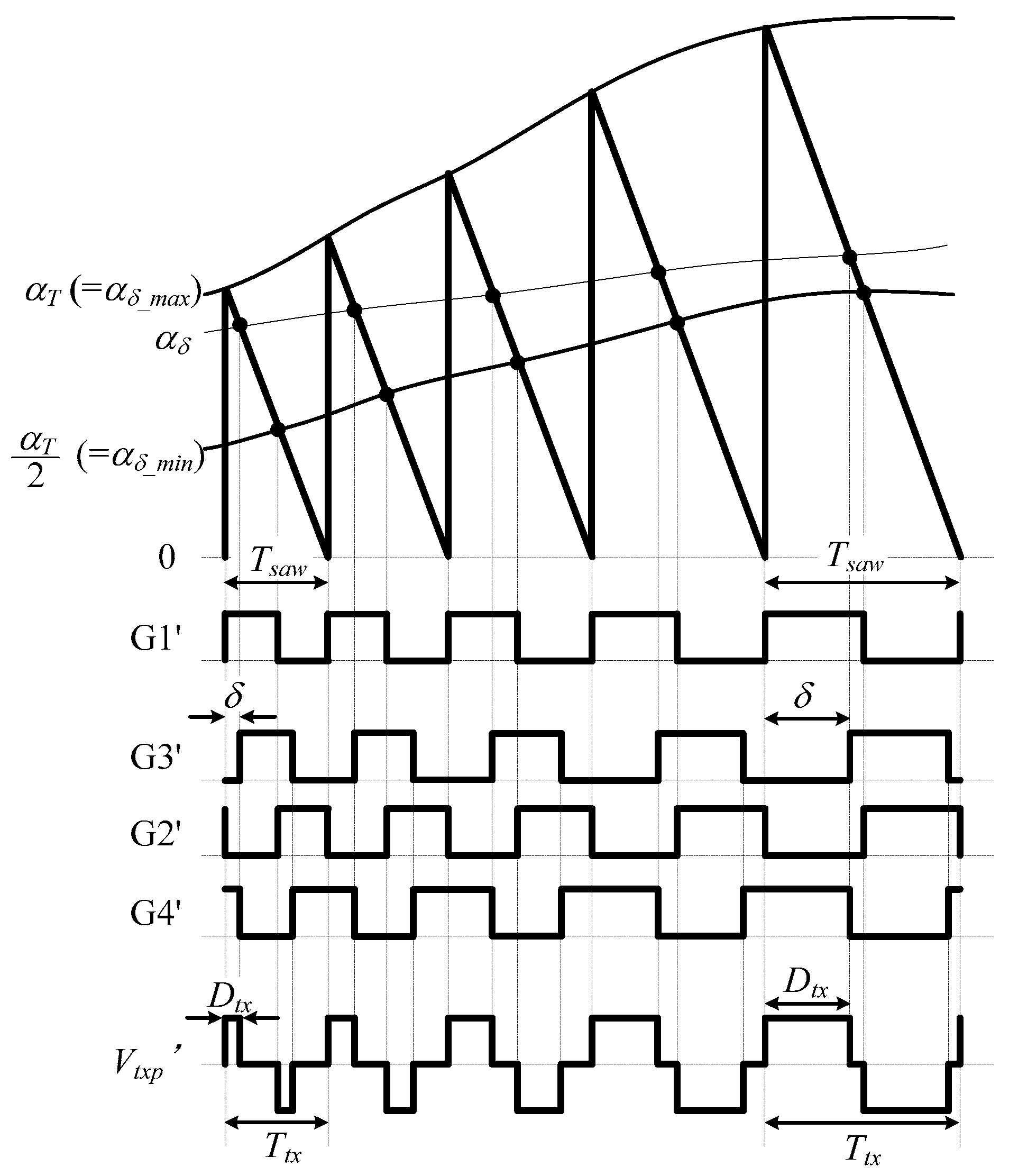
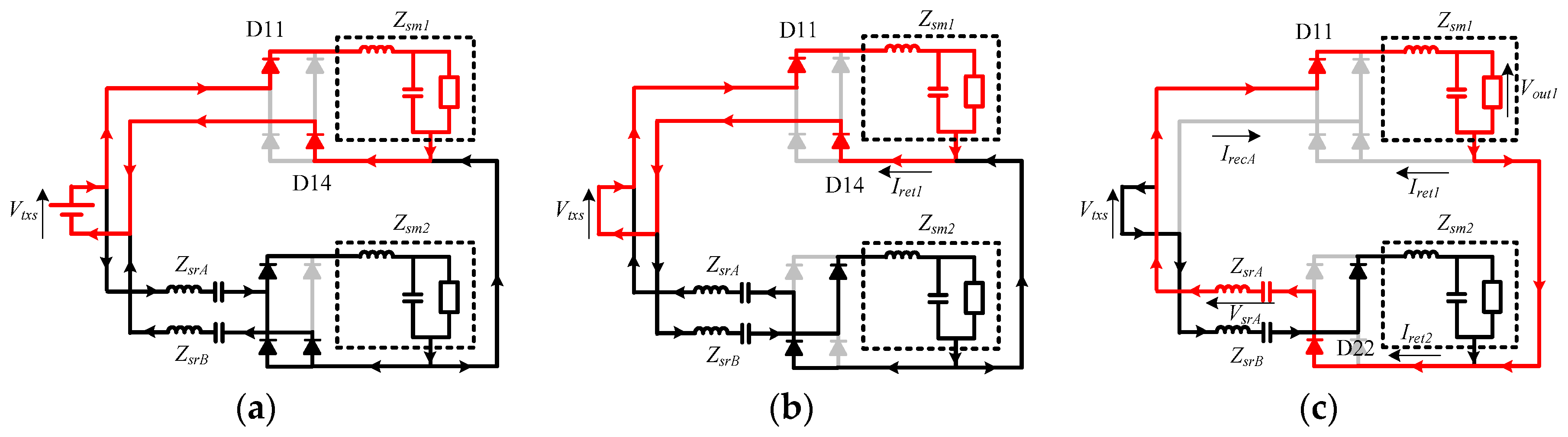
2.2. Operating Principles of Proposed Control Method
3. Verification of Proposed Method Using Actual Circuit
3.1. Circuit Specifications
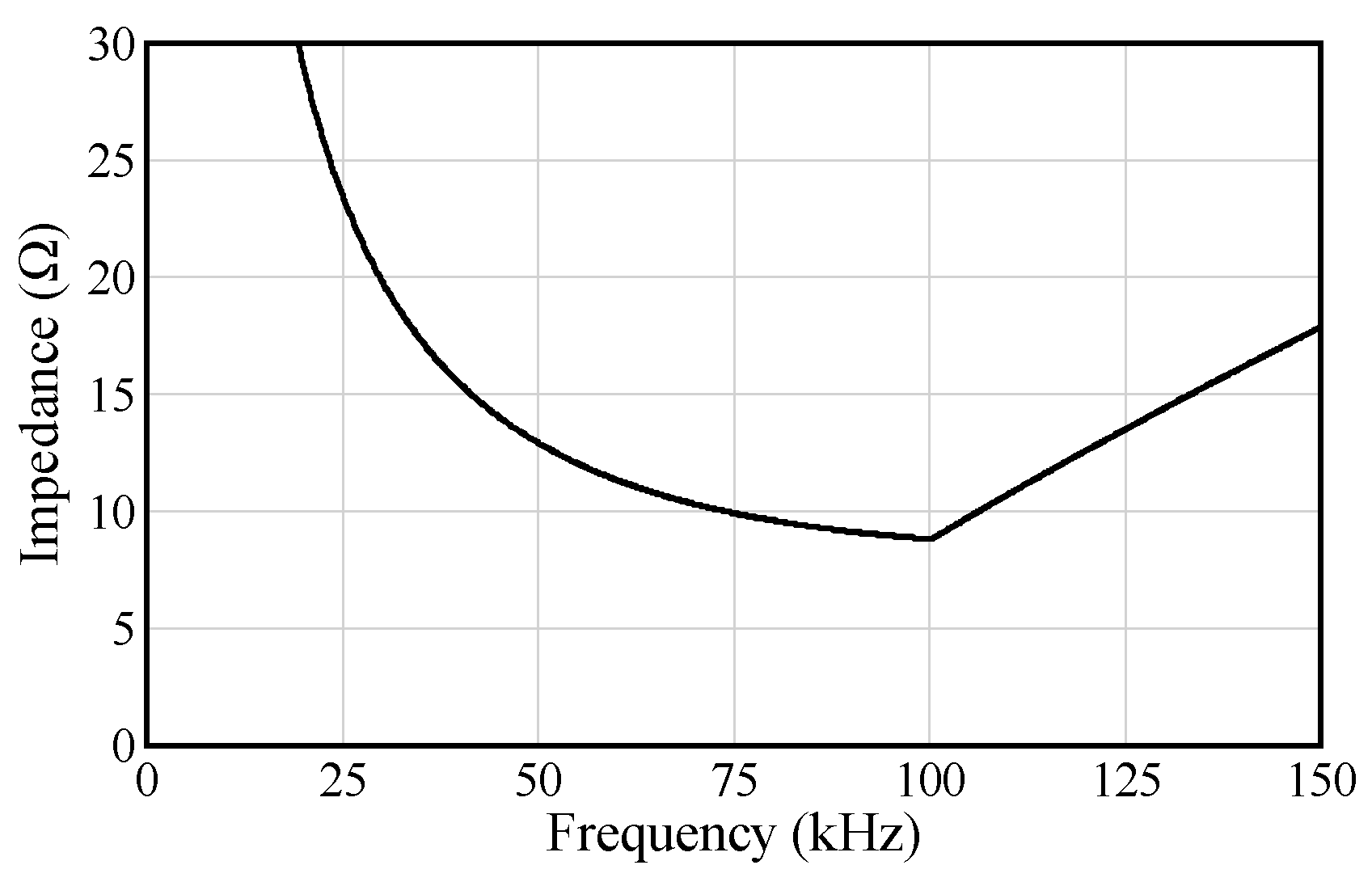
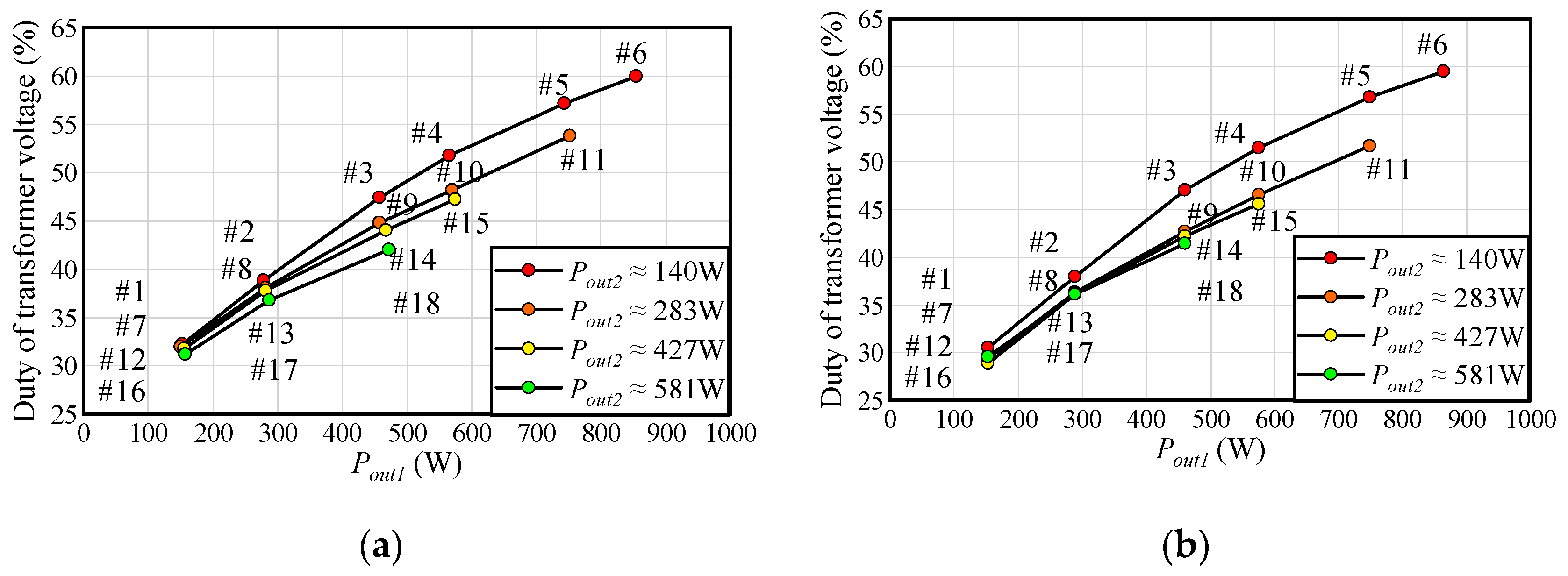
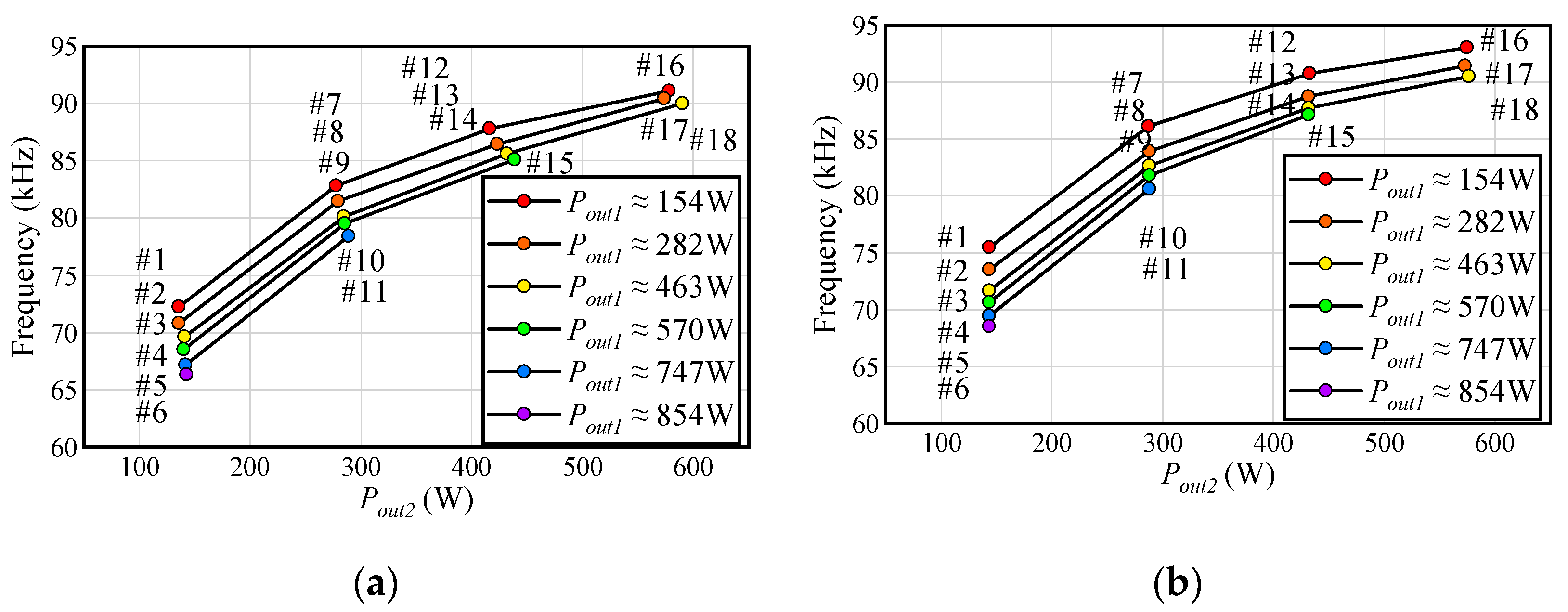
3.2. Static Characteristics
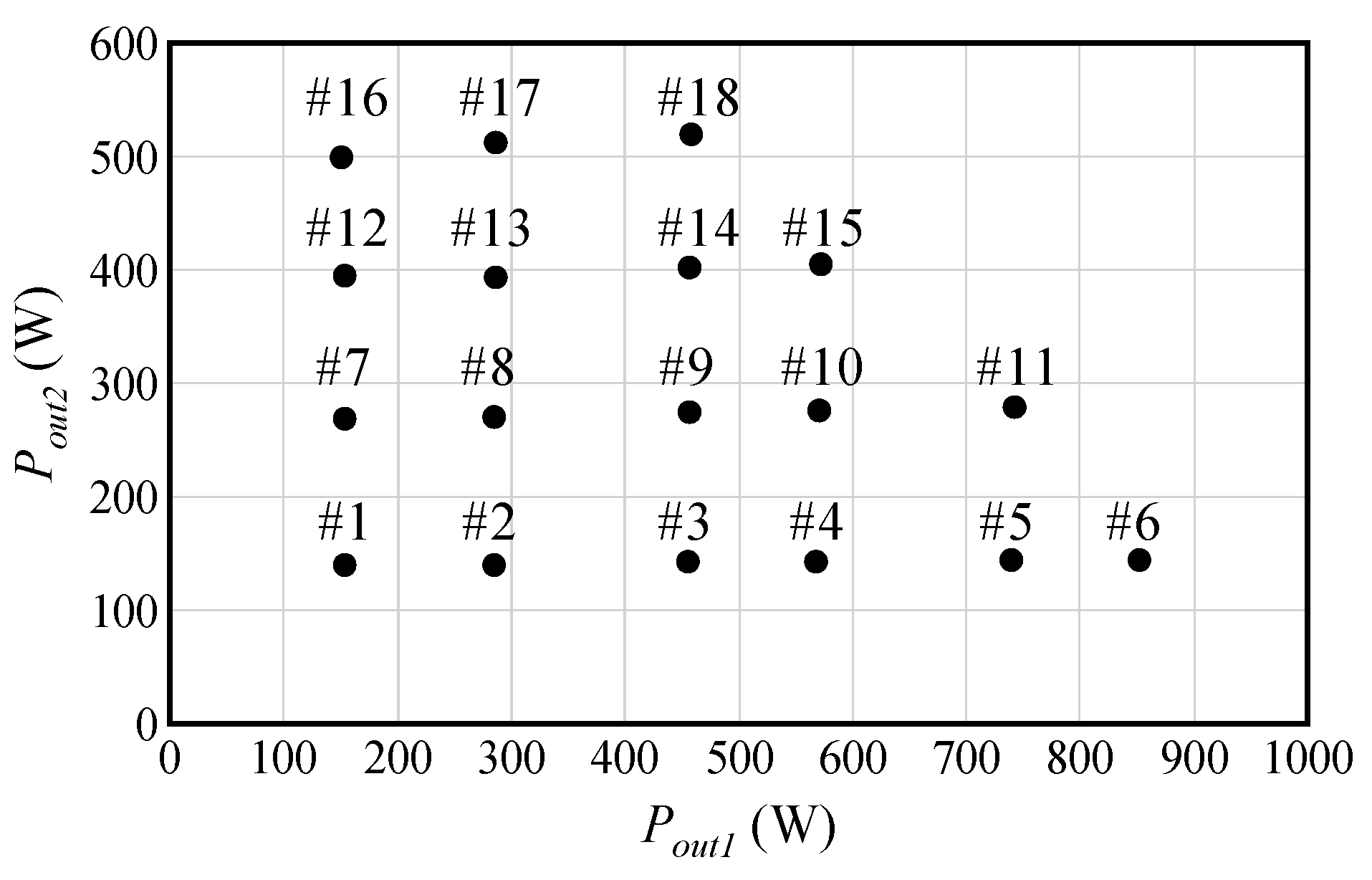
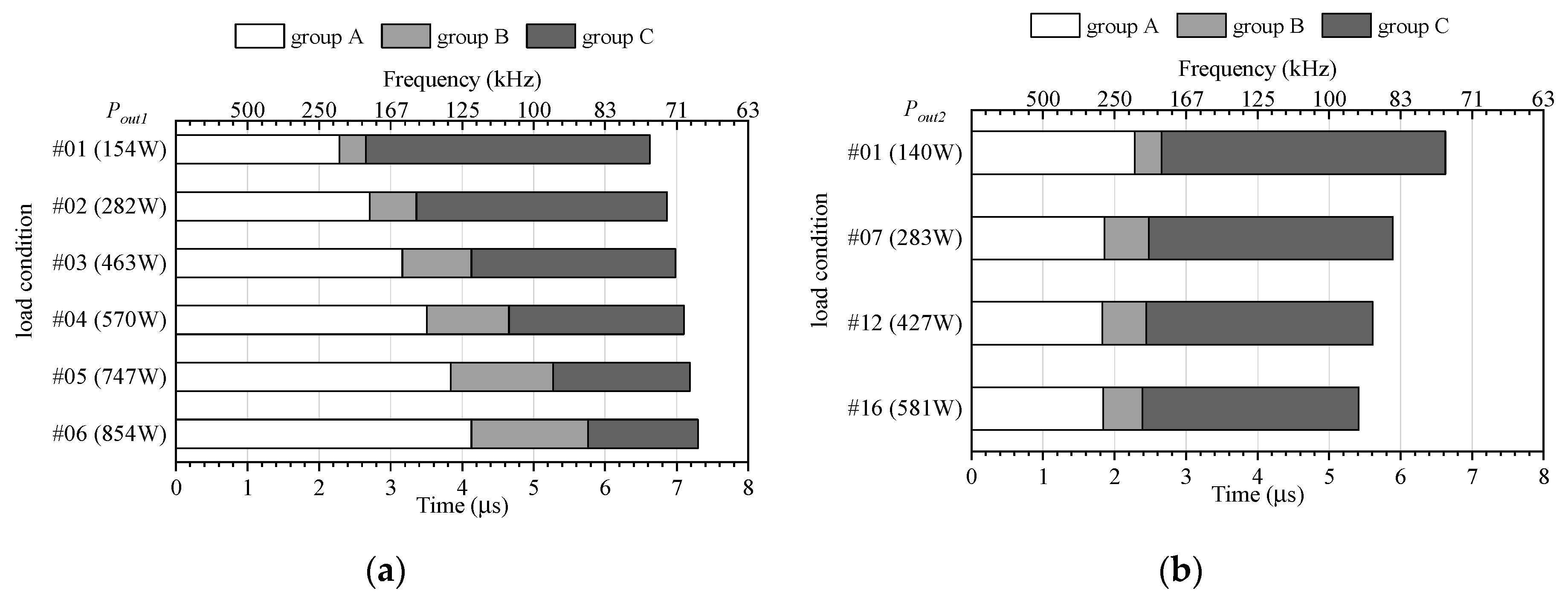
3.3. Operation Points
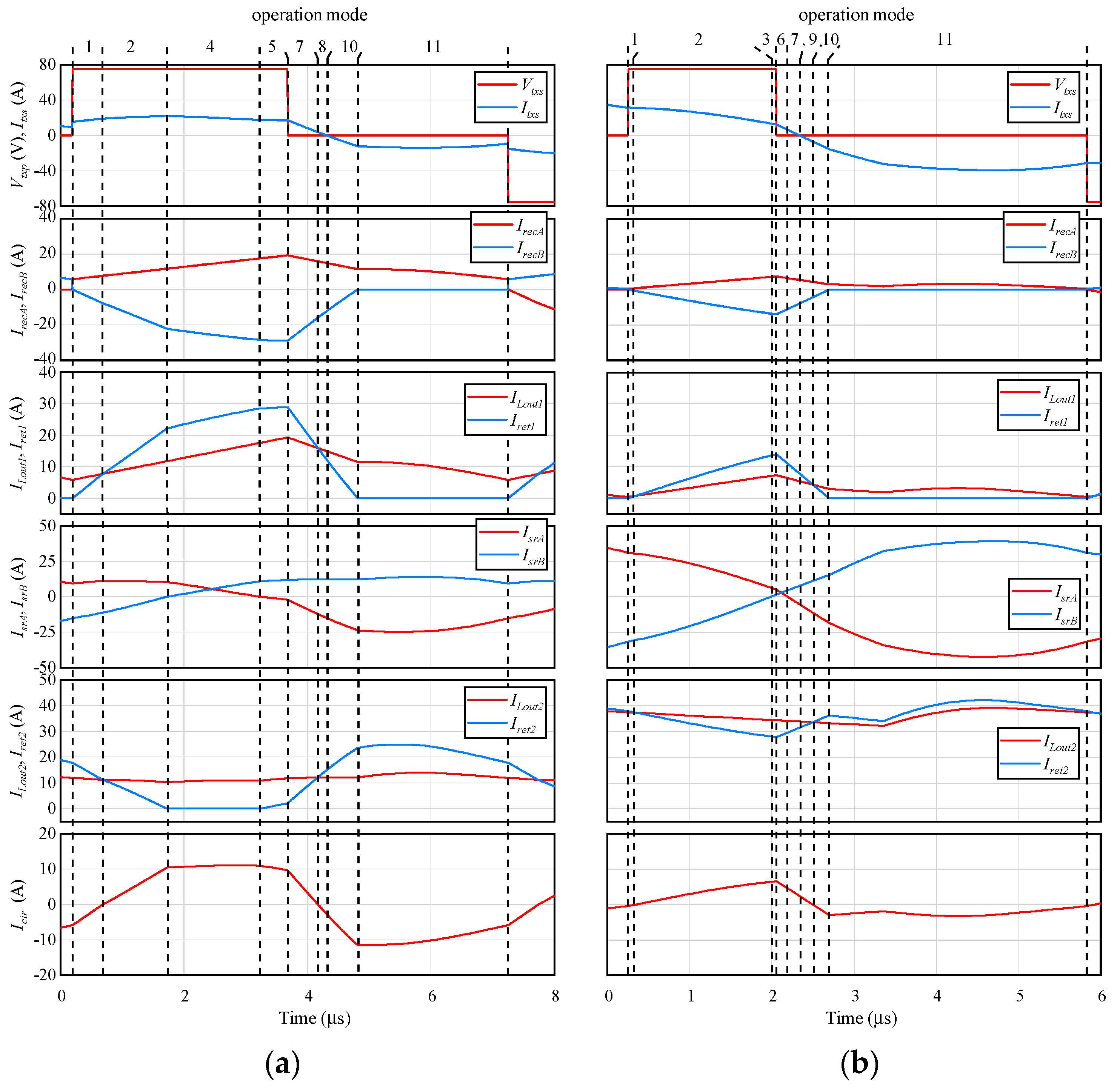
3.4. Analysis of Steady Operation
- Group A: Lout1 is charged (modes 1 to 5)
- Group B: Lout1 discharges (modes 6 to 10)
- Group C: The charge/discharge of Lout1 depends on the resonant filter voltage (mode 10)
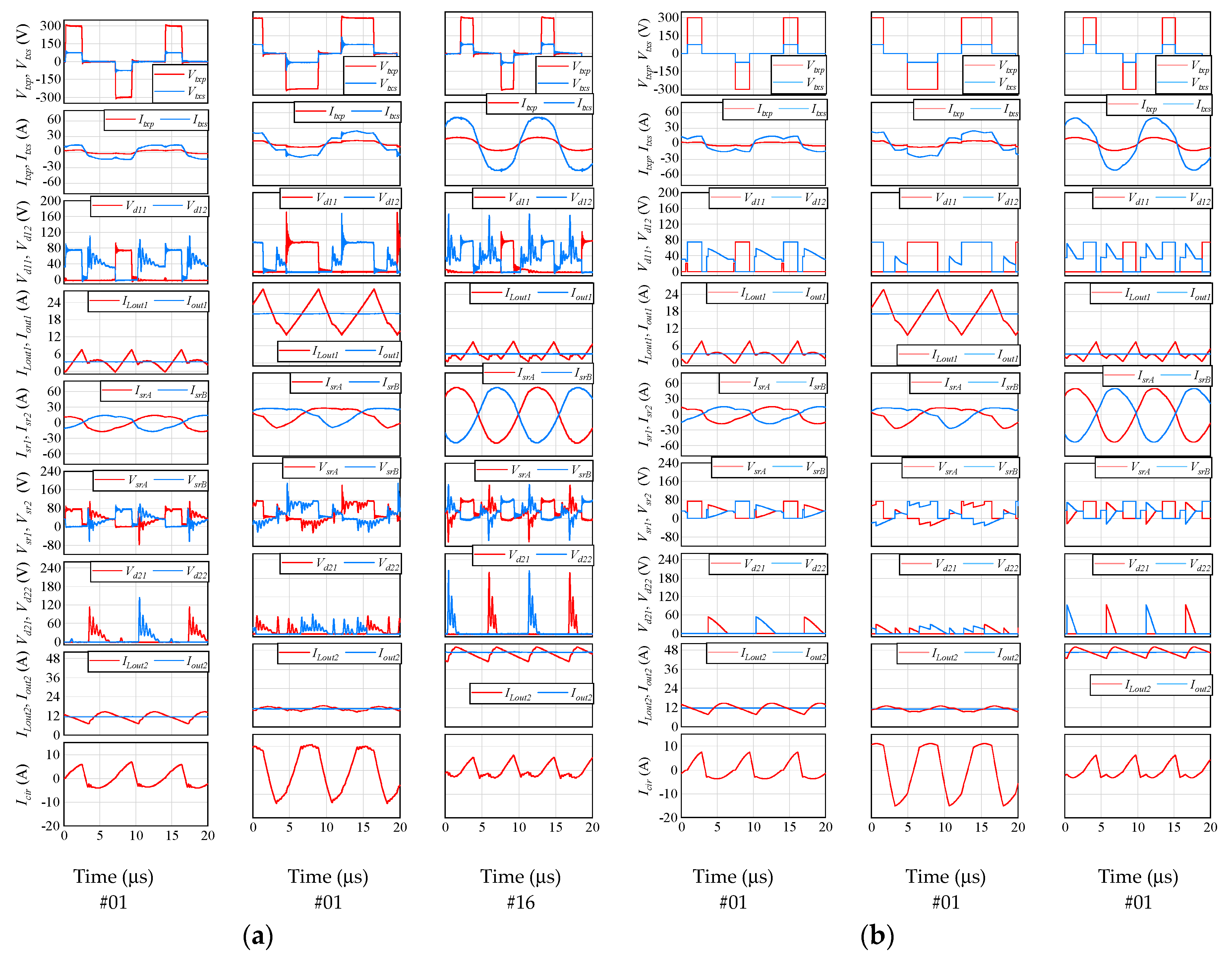
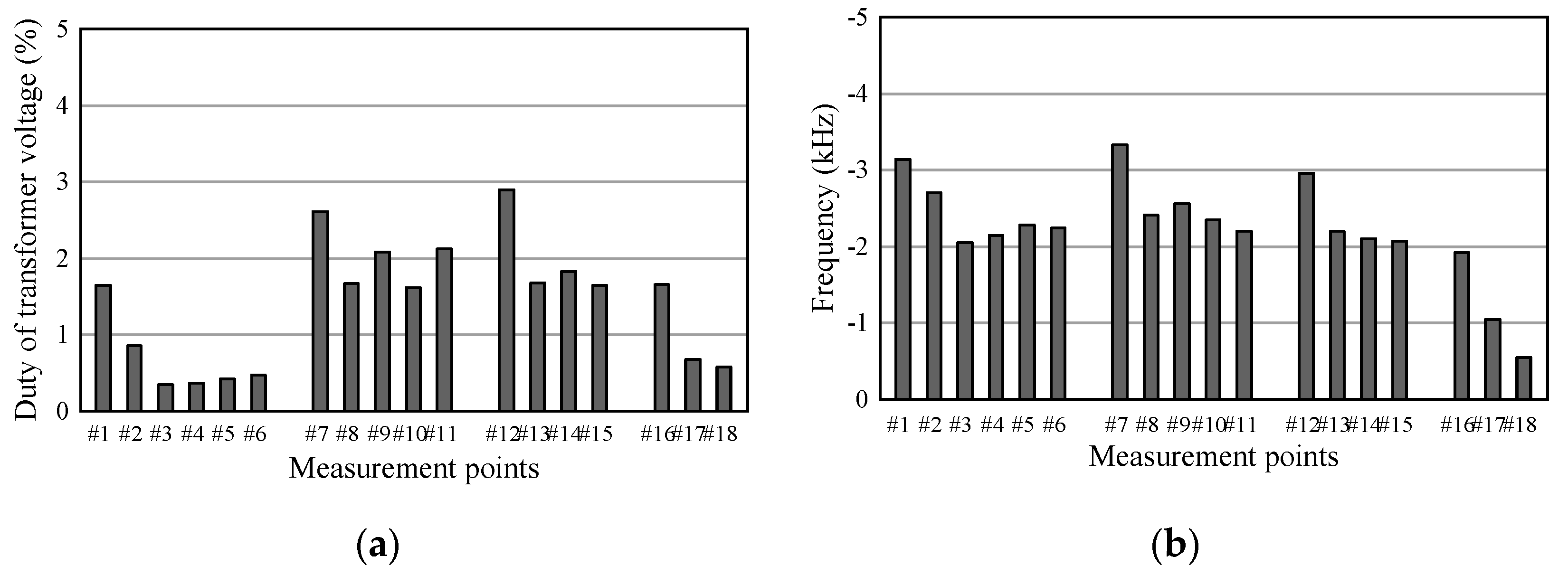
3.5. Comparative Evaluation of Simulation and Measured Results
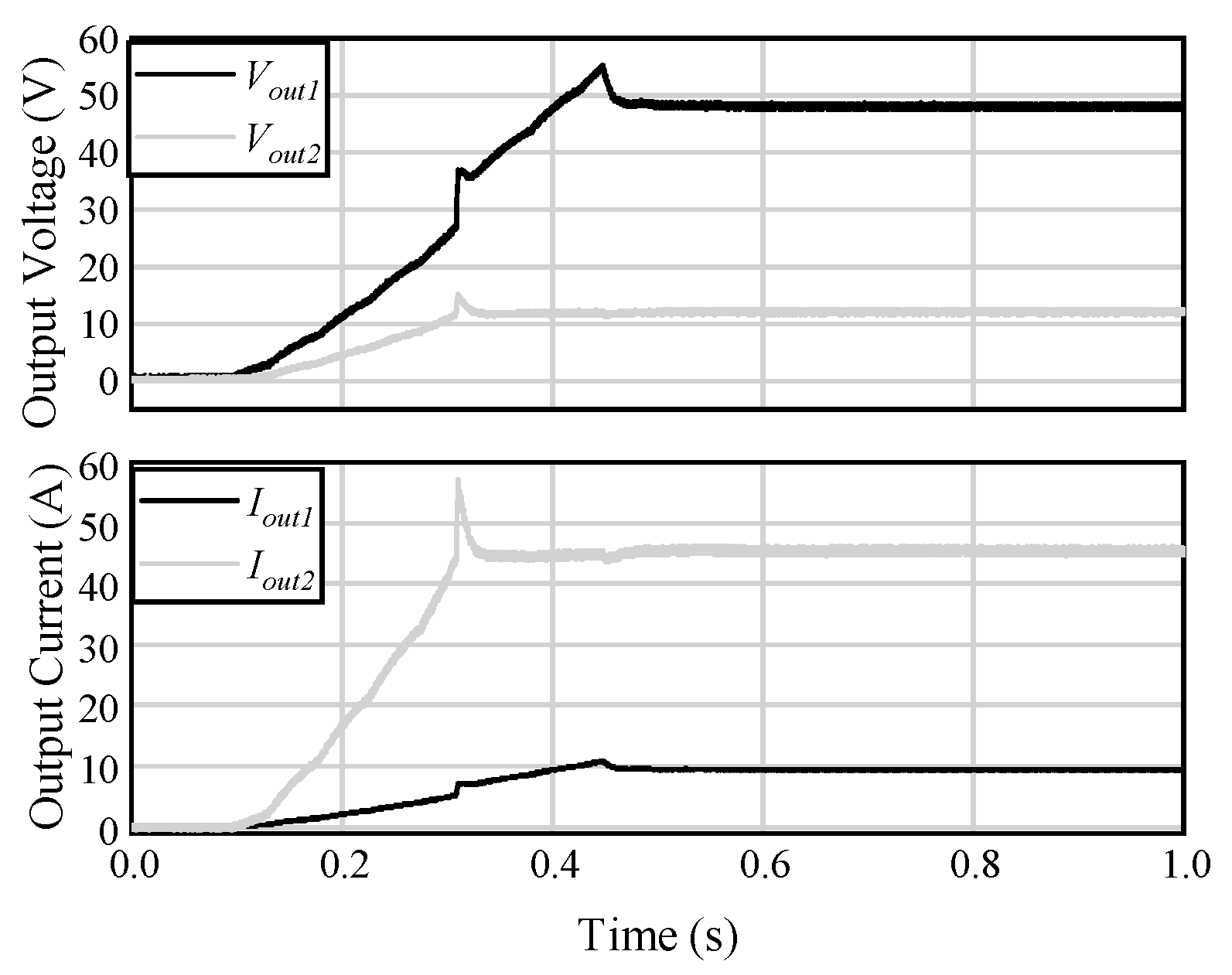
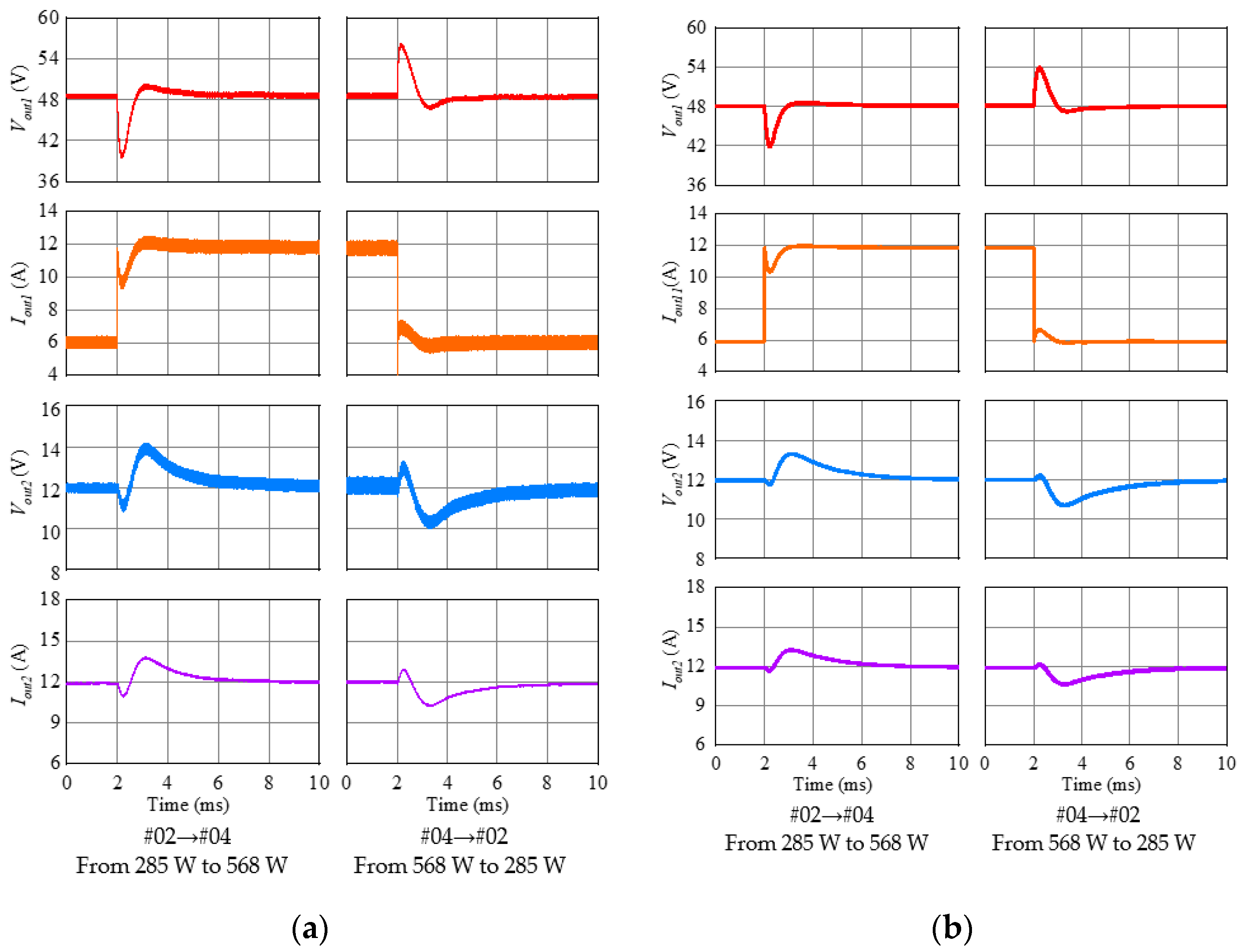
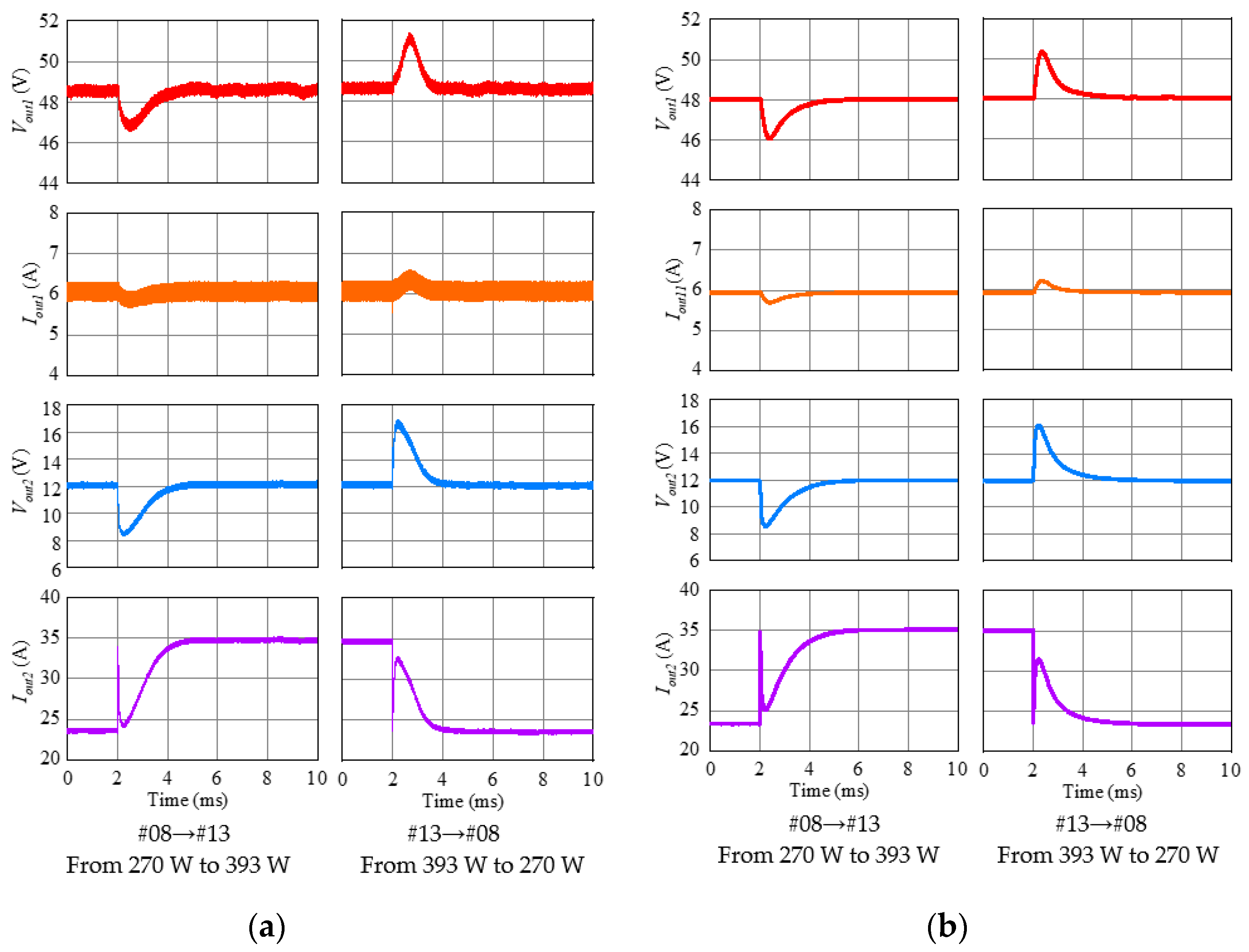
3.6. Dynamic Characteristics
4. Evaluation of Efficiency and Losses
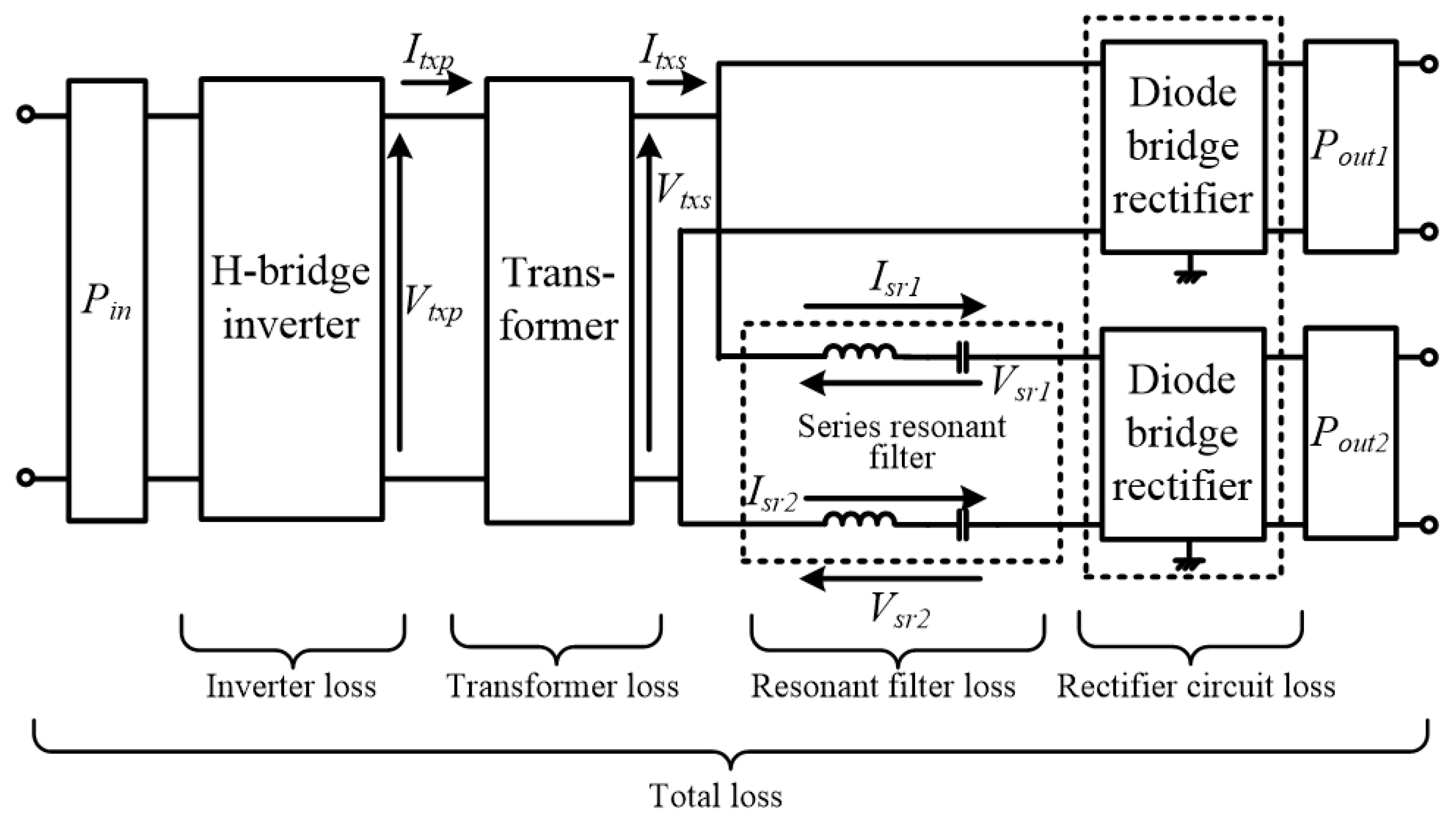
4.1. Measurement Method
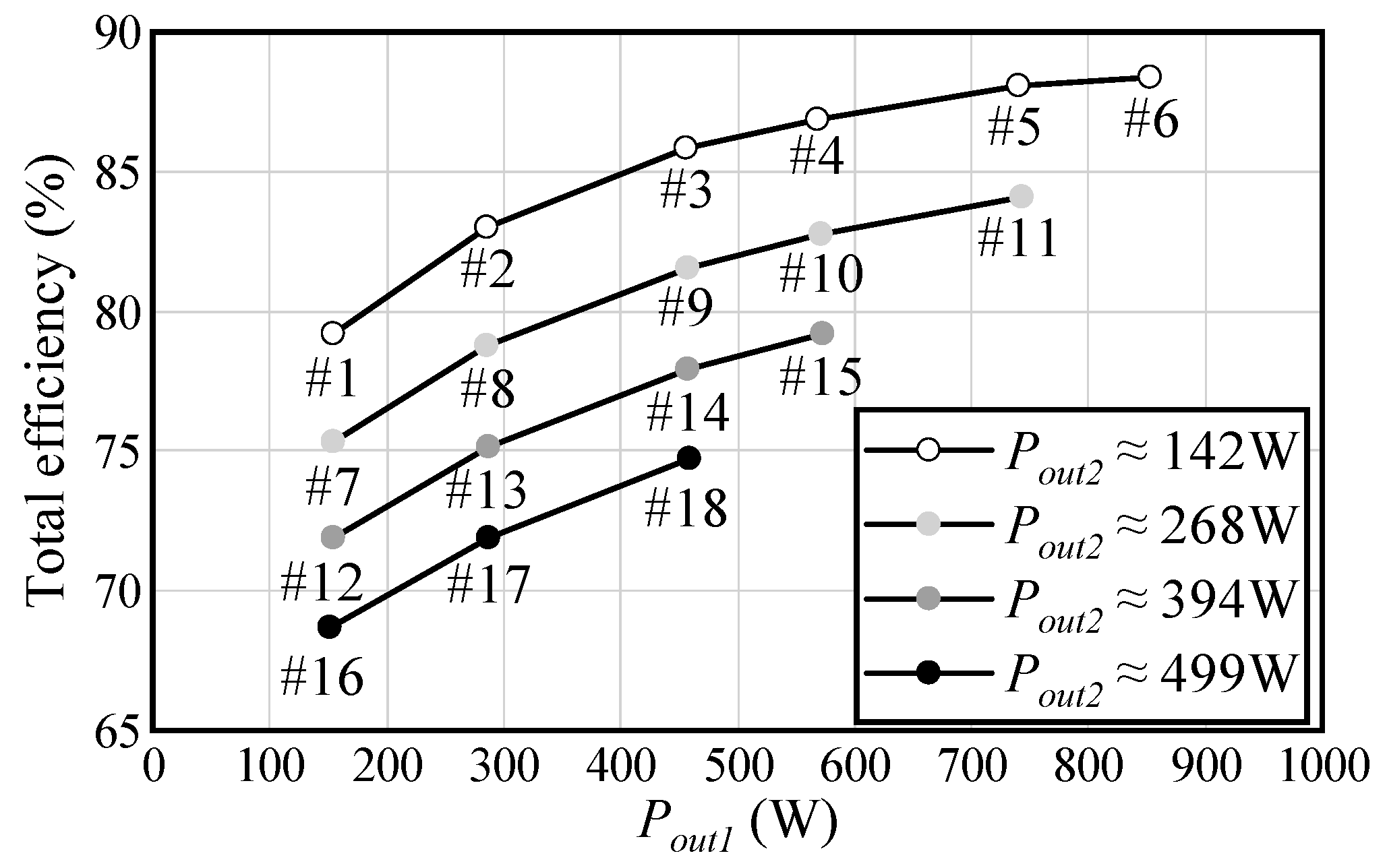
4.2. Efficiency Characteristics
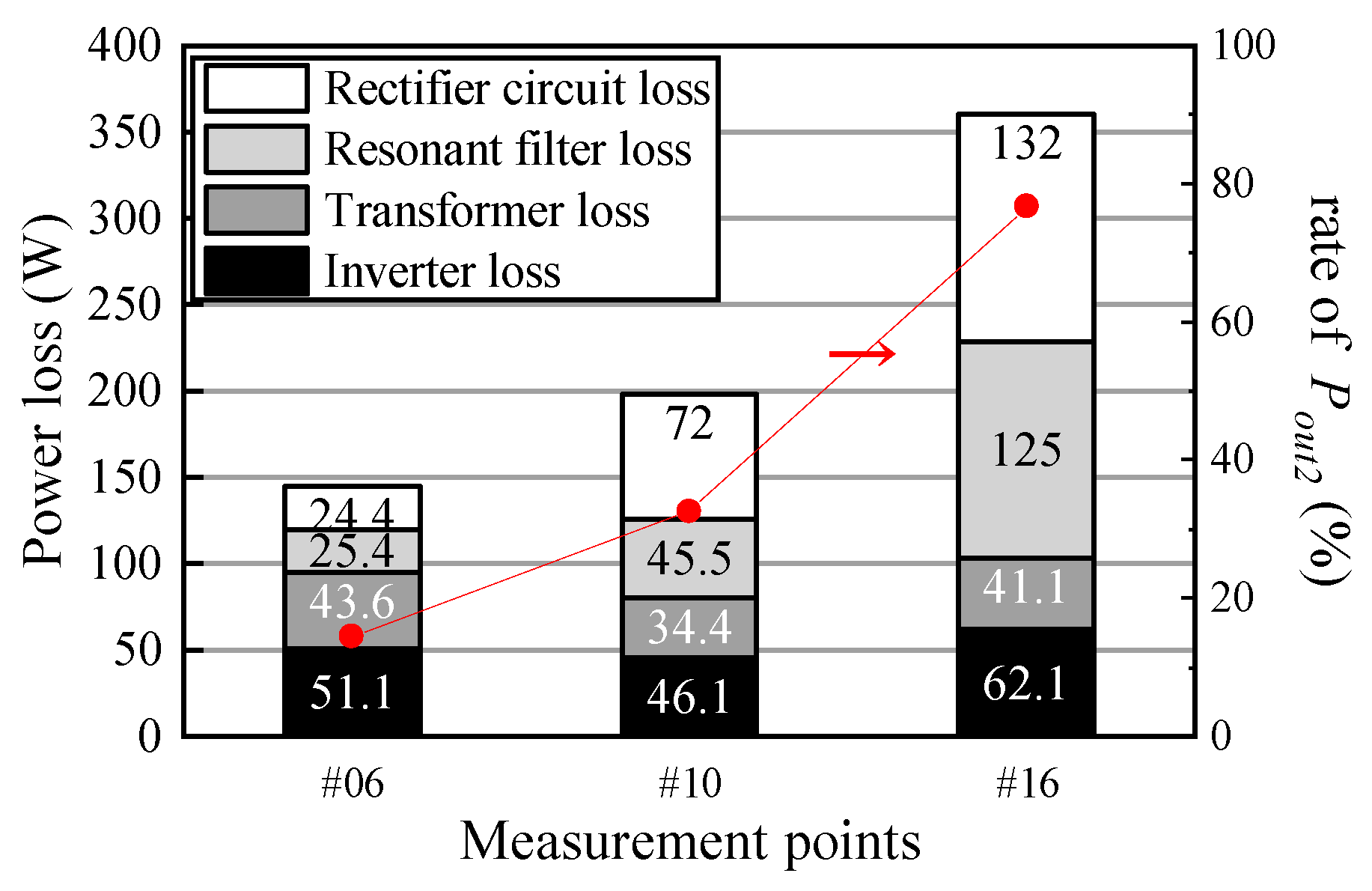
4.3. Loss Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IEA—International Energy Agency. CO2 Emissions from Fuel Combustion: Overview. Available online: https://www.iea.org/reports/co2-emissions-from-fuel-combustion-overview (accessed on 28 September 2020).
- IEA—International Energy Agency. Global EV Outlook 2020. Available online: https://www.iea.org/reports/global-ev-outlook-2020 (accessed on 28 September 2020).
- Krismer, F.; Kolar, J.W. Efficiency-Optimized High-Current Dual Active Bridge Converter for Automotive Applications. IEEE Trans. Ind. Electron. 2012, 59, 2745–2760. [Google Scholar] [CrossRef]
- Hou, R.; Magne, P.; Bilgin, B.; Emadi, A. A topological evaluation of isolated DC/DC converters for Auxiliary Power Modules in Electrified Vehicle applications. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015. [Google Scholar]
- Rhodes, K.; Kok, D.; Sohoni, P.; Perry, E.; Kraska, M.; Wallace, M. Estimation of the Effects of Auxiliary Electrical Loads on Hybrid Electric Vehicle Fuel Economy; SAE Technical Paper 2017-01-1155; SAE International: Pittsburgh, PA, USA, 2017. [Google Scholar]
- Adriano, S.; Chiara, F.; Fabrizio, Z.; Alessandro, D.; Fabio, O.; Annalisa, D. Experimental Analysis of the Auxiliaries Consumption in the Energy Balance of a Pre-series Plug-in Hybrid-electric Vehicle. Energy Procedia 2014, 45, 779–788. [Google Scholar] [CrossRef] [Green Version]
- Teratani, T. Impact of DC48V on Automotive Power Supply Systems—Comparison with DC42V and Future View under DC60V. IEEJ Trans. Ind. Appl. 2015, 135, 892–897. [Google Scholar] [CrossRef]
- Hayslett, S.; Maanen, K.V.; Wenzel, W.; Husain, T. The 48-V Mild Hybrid: Benefits, Motivation, and the Future Outlook. IEEE Electrif. Mag. 2020, 8, 11–17. [Google Scholar] [CrossRef]
- Chen, G.; Deng, Y.; Dong, J.; Hu, Y.; Jiang, L.; He, X. Integrated Multiple-Output Synchronous Buck Converter for Electric Vehicle Power Supply. IEEE Trans. Veh. Technol. 2017, 66, 5752–5761. [Google Scholar] [CrossRef]
- Kim, T.; Baek, S. Multiple bus motor drive based on a single inductor multi output converter in 48 V electrified vehicles. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017. [Google Scholar]
- Kim, T.; Kwak, S. A Flexible Voltage Bus Converter for the 48-/12-V Dual Supply System in Electrified Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 2010–2018. [Google Scholar] [CrossRef]
- Dao, N.D.; Lee, D.; Phan, Q.D. High-Efficiency SiC-Based Isolated Three-Port DC/DC Converters for Hybrid Charging Stations. IEEE Trans. Power Electron. 2020, 35, 10455–10465. [Google Scholar] [CrossRef]
- Tang, Y.; Lu, J.; Wu, B.; Zou, S.; Ding, W.; Khaligh, A. An Integrated Dual-Output Isolated Converter for Plug-in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 966–976. [Google Scholar] [CrossRef]
- Inoue, S.; Itoh, K.; Ishigaki, M.; Sugiyama, T.; Sugai, M. An isolated three-port DC-DC converter with high power density in 10 cm × 5cm × 0.8 cm card size for flexible automotive systems. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar]
- Matsushita, Y.; Noguchi, T.; Kimura, O.; Sunayama, T. Current-doubler based multiport DC/DC converter with galvanic isolation. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017. [Google Scholar]
- Noguchi, T.; Shimizu, K.; Matsushita, Y. Dual-port output control of isolated DC/DC converter focusing on duty cycle and frequency of primary inverter. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017. [Google Scholar]
- Jones, E.A.; Rooij, M.; Biswas, S. GaN Based DC-DC Converter for 48 V Automotive Applications. In Proceedings of the 2019 IEEE Workshop on Wide Bandgap Power Devices and Applications in Asia (WiPDA Asia), Taipei, Taiwan, 23–25 May 2019. [Google Scholar]
- Martines-Heredia, J.M.; Colodro, F.; Mora-Jiménez, J.L.; Remujo, A.; Soriano, J.; Esteban, S. Development of GaN Technology-Based DC/DC Converter for Hybrid UAV. IEEE Access 2020, 8, 88014–88025. [Google Scholar] [CrossRef]
- Mitova, R.; Ghosh, R.; Mhaskar, U.; Klikic, D.; Wang, M.; Dentella, A. Investigations of 600-V GaN HEMT and GaN Diode for Power Converter Applications. IEEE Trans. Power Electron. 2014, 29, 2441–2452. [Google Scholar] [CrossRef]
- Huang, X.; Lee, F.C.; Li, Q.; Du, W. High-Efficiency GaN-Based Interleaved CRM Bidirectional Buck/Boost Converter with Inverse Coupled Inductor. IEEE Trans. Power Electron. 2016, 31, 4343–4352. [Google Scholar] [CrossRef]
- Rahmani, F.; Niknejad, P.; Agarwal, T.; Barzegaran, M. Gallium Nitride Inverter Design with Compatible Snubber Circuits for Implementing Wireless Charging of Electric Vehicle Batteries. Machines 2020, 8, 56. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pout1 + Pout2 (MAX) | 1 kW |
| Pout2 (MAX) | 500 W |
| Vin | 300 V |
| Vout1 | 48 V |
| Vout2 | 12 V |
| fswmin | 50 kHz |
| fswMAX | 100 kHz |
| FPGA | XC7K70T-1FBG484C |
| fCLK (TCLK) | 200 MHz (5 ns) |
| K1 | 2.5 |
| K2 | 0.5 |
| τ1 | 3 μs |
| τ2 | 8 μs |
| Cin | 330 μF |
| S1, S2, S3, S4 | SCT3030AL (ROHM) |
| D11, D12, D13, D14, D21, D22, D23, D24 | FFSH4065A (ON Semiconductor) |
| Transformer turn ratio | N1:N2 = 20:5 |
| Lsr | 4.5 μH |
| Csr | 560 nF |
| Lout1 | 7.3 μH |
| Lout2 | 7.0 μH |
| Cout1 | 44 μF |
| Cout2 | 188 μF |
| f0 | 100.3 kHz |
| Instrument | Model Number |
|---|---|
| Oscilloscope | HDO6104A-MS (TELEDYNE) |
| Voltage differential probe | 700924 (YOKOGAWA) |
| Current probe (<30 A) | TCP312A (Tektronix) |
| Current probe (>30 A) | TCP303 (Tektronix) |
| Deskew calibration source | DCS025 (TELEDYNE) |
| Parameter | Value |
|---|---|
| Vin | 300 V |
| Vout1 | 48 V |
| Vout2 | 12 V |
| fswmin | 50 kHz |
| fswMAX | 100 kHz |
| fCLK (TCLK) | 200 MHz (5 ns) |
| K1 | 2.5 |
| K2 | 0.5 |
| τ1 | 3 μs |
| τ2 | 8 μs |
| Cin | 330 μF |
| S1, S2, S3, S4 | Ideal devices |
| D11, D12, D13, D14, D21, D22, D23, D24 | Ideal devices |
| Transformer turn ratio | N1:N2 = 20:5 |
| Lsr | 4.5 μH |
| Csr | 560 nF |
| Lout1 | 7.3 μH |
| Lout2 | 7.0 μH |
| Cout1 | 44 μF |
| Cout2 | 188 μF |
| Voltage/Current | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Vtxs | + | + | + | + | + | 0 | 0 | 0 | 0 | 0 | 0 |
| Itxs | + | + | + | + | + | + | + | + | − | − | − |
| IrecA | + | + | + | + | + | + | + | + | + | + | + |
| IrecB | − | − | − | − | − | − | − | − | − | − | 0 |
| ILout1 | + | + | + | + | + | + | + | + | + | + | + |
| Iret1 | + | + | + | + | + | + | + | + | + | + | 0 |
| IsrA | + | + | + | + | − | + | − | − | − | − | − |
| IsrB | − | − | + | + | + | + | + | + | + | + | + |
| ILout2 | + | + | + | + | + | + | + | + | + | + | + |
| Iret2 | + | + | + | 0 | + | + | + | + | + | + | + |
| Icir | − | + | + | + | + | + | + | − | + | − | − |
| Operation Point | Operation Mode | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| #01 | ○ | ○ | ○ | ○ | ○ | ||||||
| #02 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ||||
| #03 | ○ | ○ | ○ | ○ | ○ | ○ | |||||
| #04 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | |||
| #05 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | |||
| #06 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | |||
| #07 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ||||
| #12 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | |||
| #16 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ||||
| Part | Symbol | Equation |
|---|---|---|
| Total loss | Wtotal | Pin − (Pout1 + Pout2) |
| Inverter loss | Winv | Pin − Ptxp |
| Transformer loss | Wtx | Ptxp − Ptxs |
| Resonant filter loss | Wsr | Pr1 + Pr2 |
| Rectifier circuit loss | Wrec | Wtotal − (Winv + Wtx + Wsr) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsushita, Y.; Noguchi, T.; Shimizu, K.; Taguchi, N.; Ishii, M. Control of Dual-Output DC/DC Converters Using Duty Cycle and Frequency. World Electr. Veh. J. 2020, 11, 72. https://doi.org/10.3390/wevj11040072
Matsushita Y, Noguchi T, Shimizu K, Taguchi N, Ishii M. Control of Dual-Output DC/DC Converters Using Duty Cycle and Frequency. World Electric Vehicle Journal. 2020; 11(4):72. https://doi.org/10.3390/wevj11040072
Chicago/Turabian StyleMatsushita, Yoshinori, Toshihiko Noguchi, Kazuki Shimizu, Noritaka Taguchi, and Makoto Ishii. 2020. "Control of Dual-Output DC/DC Converters Using Duty Cycle and Frequency" World Electric Vehicle Journal 11, no. 4: 72. https://doi.org/10.3390/wevj11040072
APA StyleMatsushita, Y., Noguchi, T., Shimizu, K., Taguchi, N., & Ishii, M. (2020). Control of Dual-Output DC/DC Converters Using Duty Cycle and Frequency. World Electric Vehicle Journal, 11(4), 72. https://doi.org/10.3390/wevj11040072