An Assessment of Low-Cost Tractor Motorization with Main Farming Implements


Abstract
:1. Introduction
2. State of the Art
3. Hybrid Architecture Adopted
- At high speeds, the combustion engine is used as the drive.
- At low speeds, the electric motor is activated to optimize fuel efficiency and consumption; the electric motor does not run at a standstill to save the battery.
- When the driver strongly accelerates, both the electric and combustion engines work simultaneously to transmit more power.
4. Mathematical Model
4.1. Definition of the Sub-Models Composing the Sketch
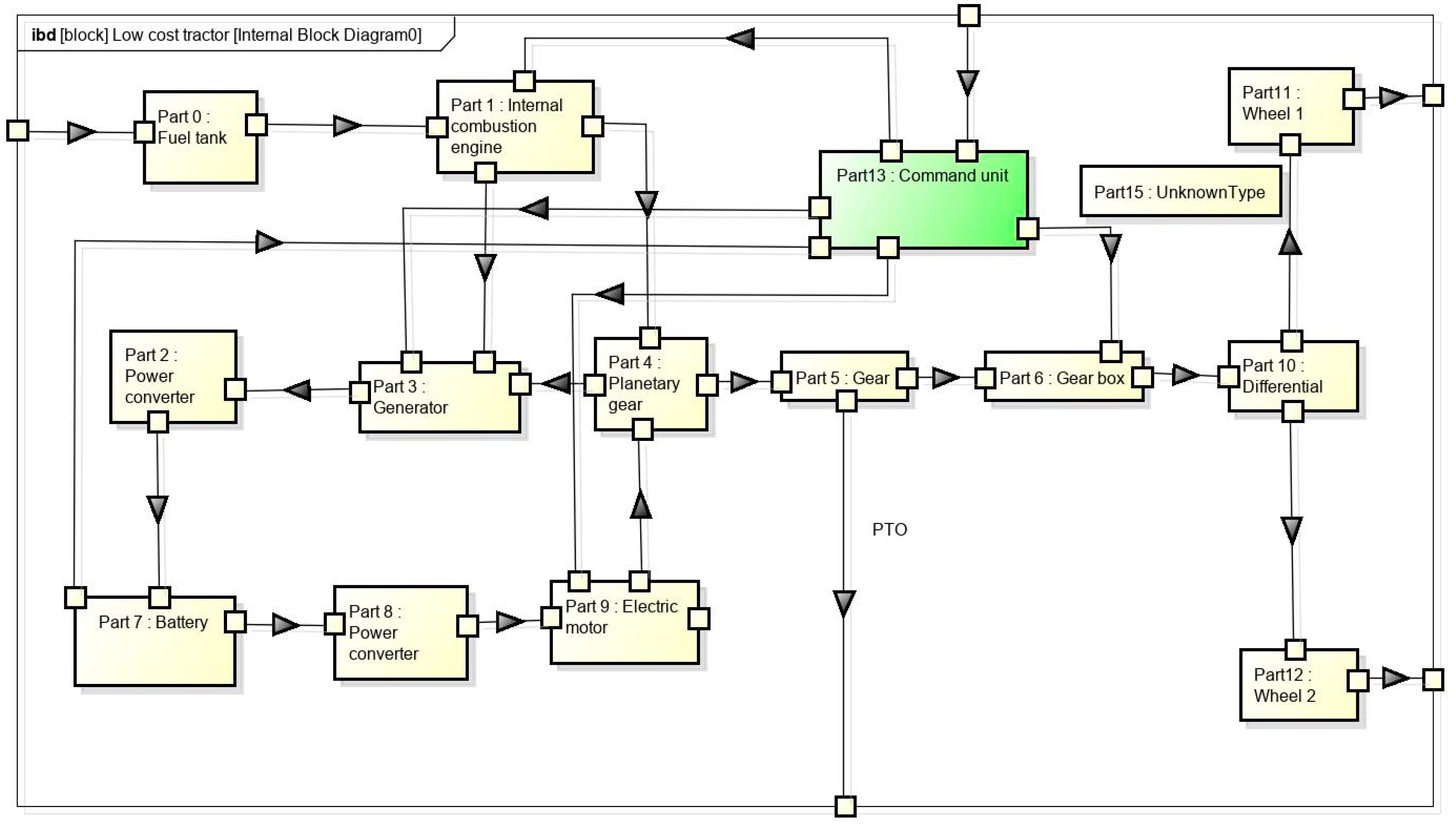
4.1.1. Tractor
4.1.2. Control Unit
- Mode 1: The battery must not be charged; the combustion engine is not used.
- Mode 2: The battery does not need to be charged; the combustion engine is used.
- Mode 3: The battery is fully charged; the engine is not used.
- Mode 4: The battery is not fully charged; the engine is used.
- If the engine speed is less than idle speed/2, then the clutch is engaged and the engine does not start.
- When the engine reaches idle speed/2, the clutch remains closed and the engine starts [34].
- Mode 1: The battery is fully charged; the combustion engine is not used.
- The battery charge state is below the lower limit (parameter) and the engine can start (the rotation speed of the gearbox input shaft is higher than the engine idling speed).
- The vehicle speed is above the speed limit (parameter).
- Mode 2: The battery is not fully charged; the combustion engine is used.
- The battery charge status is below the lower limit (parameter).
- Vehicle speed is below the speed limit (parameter).
- Mode 3: The battery is fully charged; the engine is not used.
- The battery’s state of charge is above the upper limit (parameter).
- Vehicle speed is above the speed limit (parameter).
- The engine can be started (the rotation speed of the gearbox input shaft is higher than the engine idle speed).
- Mode 4: The battery is not fully charged; the engine is used.
- The battery’s state of charge is above the upper limit (parameter).
- The engine cannot be used (the speed of rotation of the gearbox input shaft is lower than the engine idle speed).
4.1.3. Gearbox
- Torque loss
- Input shaft speed
- Rotational speed of the secondary shaft
- Torque transmitted by the secondary shaft
- Torque transmitted by the drive shaft
- Torque transmitted by the drive axle
- Power Losses
4.1.4. Internal Combustion Engine
- Torque calculation
- Dynamic Correction
- Impact of temperature
- Fuel consumption
- ➢
- Impact of temperature;
- ➢
- Overconsumption when starting the engine;
- ➢
- Deactivation of cylinders.
- Engine Emissions
- Equivalence report
- Exhaust gas mass flow rate
- Pollutant emissions
- Exhaust gas temperature
- Heat loss from engines
- Losses of combustion heat
- Energy balance
- Deactivation of cylinders
- Displacement variation
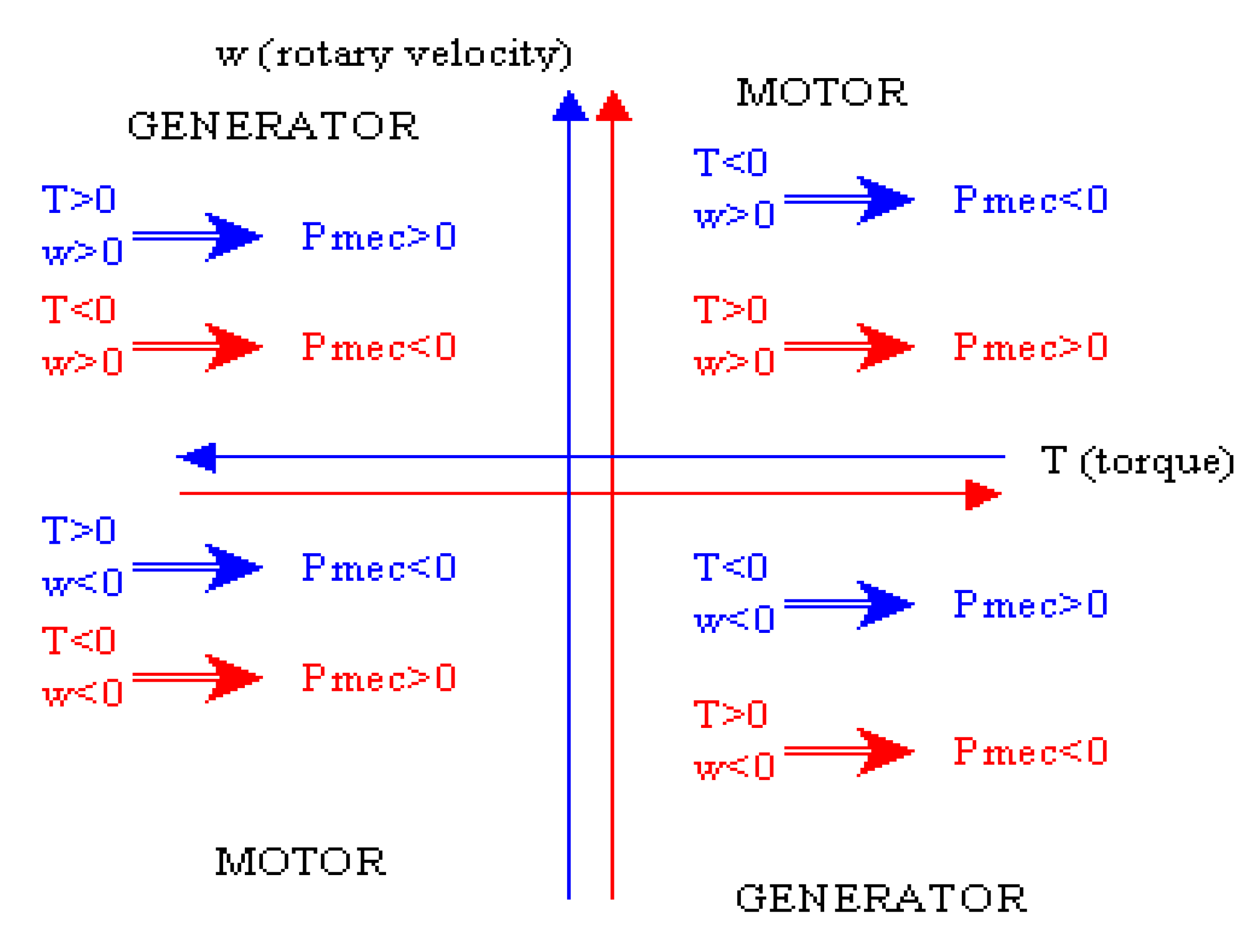
4.1.5. Electric Motor/Generator
- Torque
- Power balance
- Motor mode.
- Generator mode.
- in engine mode.
- in generator mode.
- .
- Limitation
- in engine mode.
- in generator mode.
- Electric current
4.1.6. Battery
- State of charge (SOC)
- Charge used by the load
- Output power at port 1
5. Results and Discussion
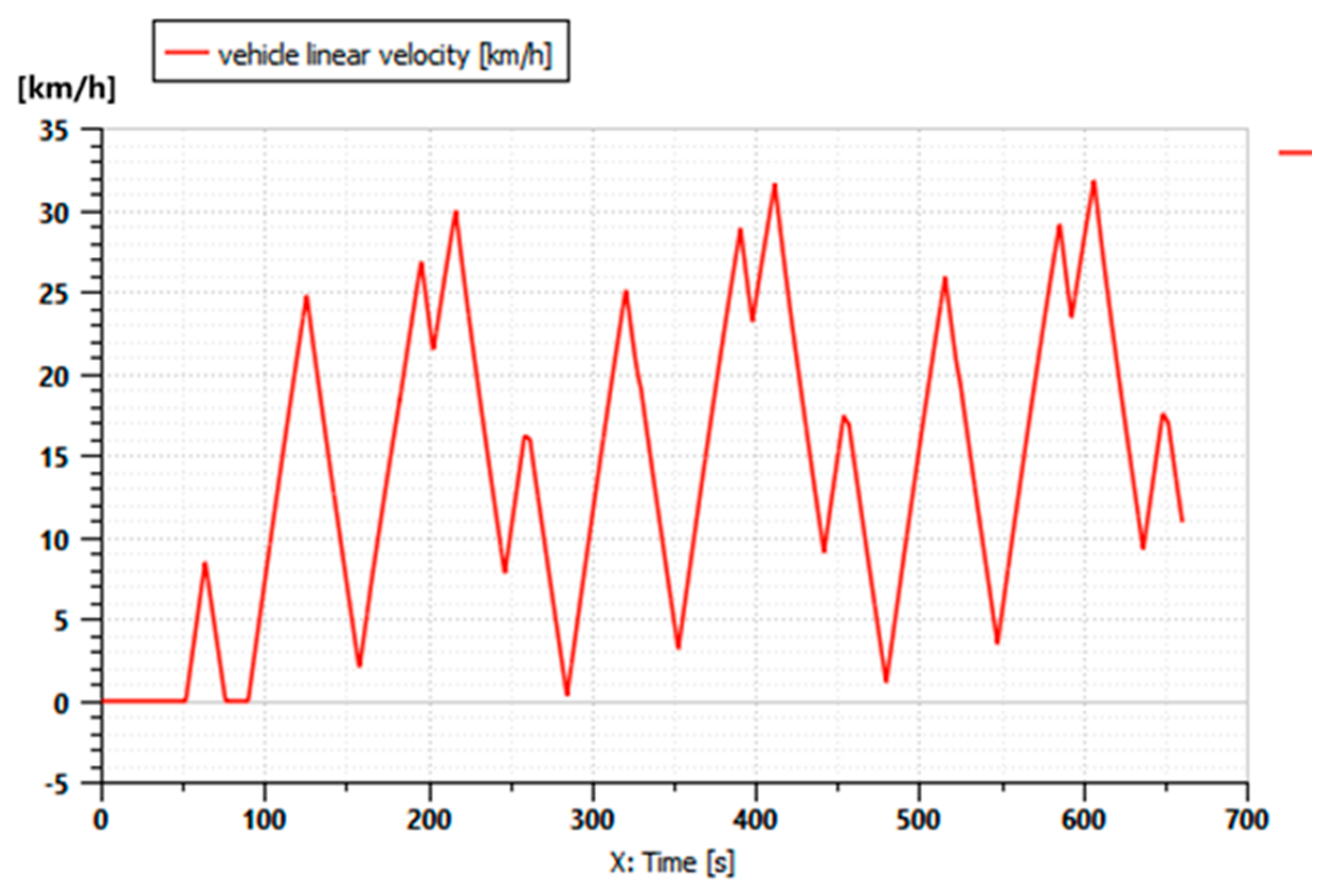
5.1. Tractor without Attached Tools
5.2. Tractor with a Moldboard Plow
5.3. Tractor with the Bette Harvest
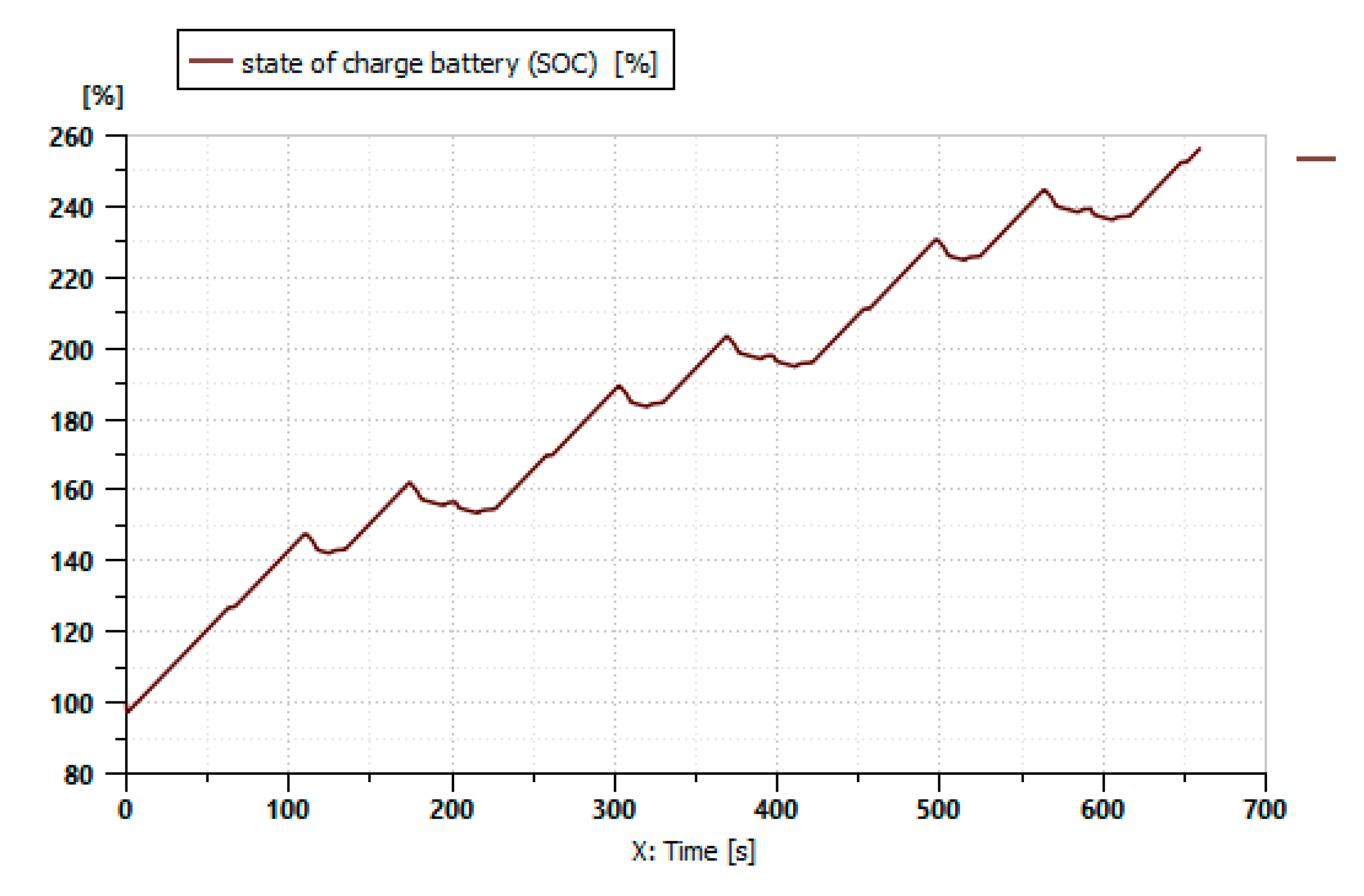
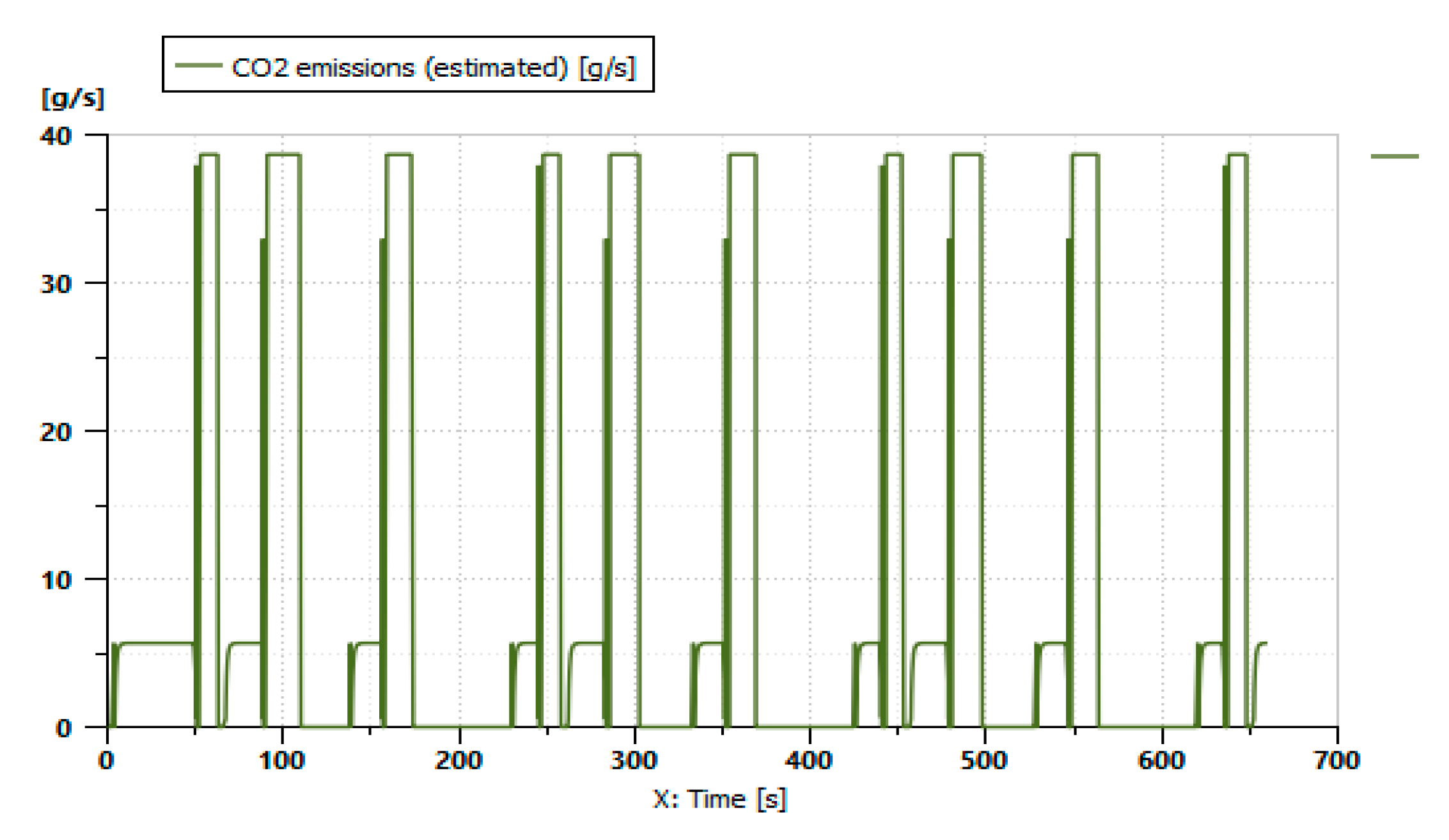
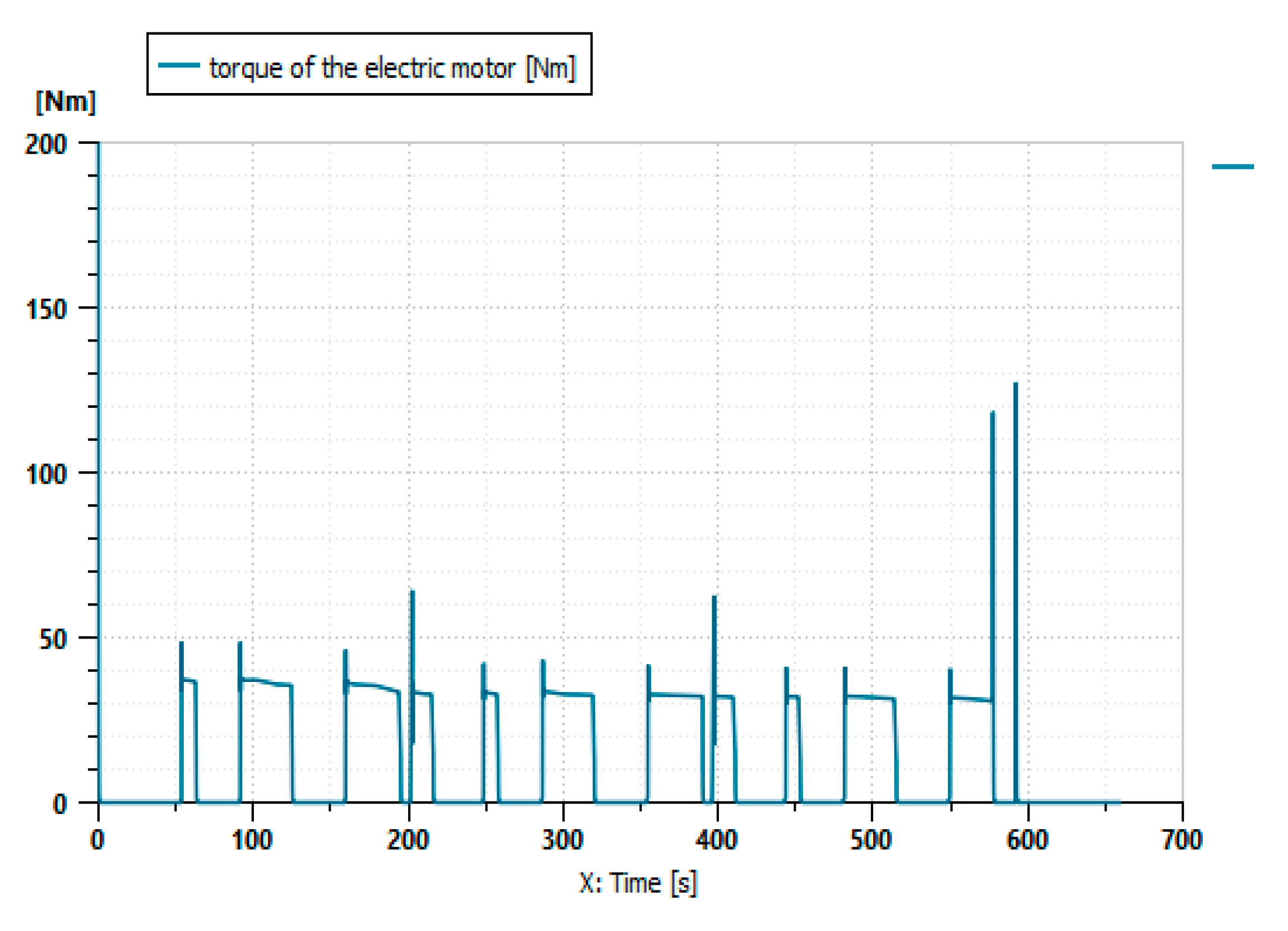
5.4. Tractor with a Straw Tub grinder
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Paillard, S. Agrimonde—Scenarios and Challenges for Feeding the World in 2050; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Alexandratos, N.; Bruinsma, J. World Agriculture towards 2030/2050; Food and Agriculture Organization of the United Nations: Roma, Italy, 2012. [Google Scholar]
- Food and Agriculture Organization of the United Nations. The Future of Food and Agriculture—Trends and Challenges; FAO: Rome, Italy, 2017. [Google Scholar]
- Kormawa, P. La Mécanisation Agricole Durable Cadre Stratéguique pour L’Afrique; FAO: Rome, Italy, 2019. [Google Scholar]
- Renius, K.T. Fundamentals of Tractors Design; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar]
- Tordo, S.; Lorenzato, G.; Zhao, J.; McEneaney, K.; Sarmiento-Saher, S.P. Options for Increased Private Sector in Resilience Investment Focus on Agriculture; World Bank: Washington, DC, USA, 2017. [Google Scholar]
- Salvat, B. Tracteurs Agricoles Renault; France Agricole: Paris, France, 2012. [Google Scholar]
- Sakai, J. Tractors: Two-wheel tractors for wet land farming. In Handbook of Agriculture Engineering; International Commission of Agricultural and Biosystems Engineering (CIGR): Liege, Belgium, 1999; Volume III, pp. 54–95. [Google Scholar]
- Karner, J.; Baldinger, M.; Schober, P.; Reichl, P.H. Hybrid systems for agricultural engineering. Landtechnik 2013, 68, 22–25. [Google Scholar]
- Karner, M.J. Prospects of hybrid systems on agricultural machinery. J. Agric. Eng. 2014, 1, 33–37. [Google Scholar] [CrossRef]
- Office of Mobile Sources. Non-Road Engines and Air Pollution; Environmental Protection Agency (EPA): Washington, DC, USA, 1669.
- Kannusamy, M.Y.L.; Ravindran, V.; Rao, N. Analysis of Multiple Hybrid Electric Concept in Agricultural Tractor through Simulation Technique; SAE International: Warrendale, PA, USA, 2019. [Google Scholar]
- Zahidi, Y.; Benhadou, S.; Medromi, H. Determining the optimal motorization for low-cost tractor. Int. J. Simul. Syst. Sci. Technol. 2020, 21, 1–13. [Google Scholar]
- Wang, L.; Zhang, Y.; Yin, C.; Zhang, H.; Wang, C. Hardware-in-the-loop simulation for the design and verification of the control system of a series–parallel hybrid electric city-bus. Simul. Model. Pract. Theory 2012, 25, 148–162. [Google Scholar] [CrossRef]
- Inoue, H. Development of hybrid hydraulic excavators. In Proceedings of the 9th JFPS International Symposium, Matsue, Japan, 28–31 October 2014. [Google Scholar]
- Zhang, B.; Guo, S.; Zhang, X.; Xue, Q.; Teng, L. Adaptive smoothing power following control strategy based on an optimal efficiency map for a hybrid electric tracked vehicle. Energies 2020, 13, 1893. [Google Scholar] [CrossRef]
- Ceresoli, F. Excavator with Two or Three Arms: Dynamical Behavior and Structural Implications; Department of Mechanical and Industrial Engineering, University of Brescia: Brescia, Italy, 2020. [Google Scholar]
- Wang, D.; Lu, X.; Wang, H.; Chen, M. A new design of foaming agent mixing device for a pneumatic foaming system used for mine dust suppression. Int. J. Min. Sci. Technol. 2016, 26, 187–192. [Google Scholar] [CrossRef]
- Shen, W.; Jiang, J.; Su, X.; Karimi, H.R. Control strategy analysis of the hydraulic hybrid excavator. J. Frankl. Inst. 2014, 352, 541–561. [Google Scholar] [CrossRef]
- Lin, T.; Wang, Q.; Hu, B.; Gong, W. Development of hybrid powered hydraulic construction machinery. Autom. Constr. 2020, 19, 11–19. [Google Scholar] [CrossRef]
- Choi, J.; Kim, H.; Yu, S.; Yi, K.C. Development of integrated controller for a compound hybrid excavator. J. Mech. Sci. Technol. 2011, 25, 1557. [Google Scholar] [CrossRef]
- Yoon, J.I.; Truong, D.Q.; Ahn, K.K. A generation step for an electric excavator with a control strategy and verifications of energy consumption. Int. J. Precis. Eng. Manuf. 2013, 14, 755–766. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, N.; Peng, Y.; Zhang, Y.; Wang, J. Research on energy saving control strategy of parallel hybrid loader. Autom. Constr. 2014, 38, 100–108. [Google Scholar] [CrossRef]
- Hui, J.J.S. Research on the system configuration and energy control strategy for parallel hydraulic hybrid loader. Autom. Constr. 2010, 19, 100–108. [Google Scholar] [CrossRef]
- Dagci, O.H.; Peng, H.; Grizzle, J.W. Power-Split Hybrid Electric Powertrain Design with Two Planetary Gearsets for Light-Duty Truck Applications; International Federation of Automatic Control (IFAC): New York, NY, USA, 2015; pp. 8–15. [Google Scholar]
- van Keulen, T.; van Mullem, D.; de Jager, B.; Kessels, J.T.; Steinbuch, M. Design, implementation, and experimental validation of optimal power split control for hybrid electric trucks. Control Eng. Pract. 2012, 20, 547–558. [Google Scholar] [CrossRef]
- Bodria, L. Evolution and Prospects of Agricultural Mechanization in the World; Italian Agriculture Machinery Manufacture Federation: Boulogne, Italy, 2016. [Google Scholar]
- Ehsani, M.; Gao, Y.; Miller, J.M. Hybrid electric vehicles: Architecture and motor drives. Proc. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- Modern, C.K. Electric Vehicle Technology; Springer: New York, NY, USA, 2001. [Google Scholar]
- American Society of Agricultural and Biological Engineers. Agricultural Machinery Management Data; American Society of Agricultural Engineers: St. Joseph, MI, USA, 2000. [Google Scholar]
- Baek, S.W.; Lee, S.W. Aerodynamic drag reduction on a realistic vehicle using continuous. Microsyst. Technol. 2019, 26, 11–23. [Google Scholar] [CrossRef]
- Khanipour, A.; Ebrahimi, K.M.; Seale, W.J. Conventional design and simulation of an urban hybrid bus. Int. J. Mech. Mechatron. Eng. 2007, 1, 147. [Google Scholar]
- Szadkowski, B.; Chrzan, P.J.; Roye, D. A study of energy requirements for electric and hybrid vehicles in cities. In Proceedings of the 2003 International Conference on Clean, Efficient and Safe Urban Transport, Gdansk, Poland, 4–6 June 2003. [Google Scholar]
- Bissam, A. Étude et Commande des Véhicules Hybrides Parallèles; Université de Bejaïa: Bejaïa, Algery, 2013. [Google Scholar]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybride Electric and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Bouzidi, I. Etude des Vibrations Libres D’une Boite de Vitesse Par la Méthode des Éléments Finis. Ph.D. Thesis, The Universite Abou Bekr Belkaid-Tlemcenfaculte De Technologie, Chetouane, Algery, 2013. [Google Scholar]
- Dion, J.L.; Le Moyne, S.; Chevallier, G.; Sebbah, H. Gear impacts and idle gear noise: Experimental study and non linear dynamic model. Mech. Syst. Signal Process. 2009, 23, 2608–2628. [Google Scholar] [CrossRef] [Green Version]
- Mèmeteau, H.B. Technologie Fonctionnelle de L’automobile: Transmission, Train Roulant et Equipement Electrique; Dunod: Paris, France, 2014. [Google Scholar]
- Martin, M.R.; Hoeijmakers, J. The electrical variable transmission in a city bus. In Proceedings of the 35th Annual IEEE Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004. [Google Scholar]
- Kowalak, P.; Borkowski, T.; Bonisławski, M.; Hołub, M.; Myśków, J. A statistical approach to zero adjustment in torque measurement of shippropulsion shafts. Measurement 2020, 164, 108088. [Google Scholar] [CrossRef]
- Tamada, S.; Bhattacharjee, D.; Dan, P.K. Review on automatic transmission control in electric and non-electric automotive powertrain. Int. J. Veh. Perform. 2020, 6, 98–128. [Google Scholar] [CrossRef]
- Adeline, A. Modelisation Dynamique Globale des Boites de Vitesses Automobile; L’Institut National des Sciences Appliquees de Lyon: Lyon, France, 1997. [Google Scholar]
- Barathiraja, K.; Devaradjane, G.; Paul, J.; Rakesh, S.; Jamadade, G. Analysis of automotive transmission gearbox synchronizer wear due to torsional vibration and the parameters influencing wear reduction. Eng. Fail. Anal. 2019, 105, 427–443. [Google Scholar]
- Hridoy, S.A.A. Lightweight Authenticated Encryption for Vehicle Controller Area Network. Ph.D. Thesis, The Queen’s University, Kingston, ON, Canada, 2020. [Google Scholar]
- Kaveh, M.; Abbaspour-Gilandeh, Y. Impacts of hybrid (convective-infrared-rotary drum) drying on the quality attributes of green pea. J. Food Process. Eng. 2020, 43, e13424. [Google Scholar] [CrossRef]
- Baytorun, A.N.; Zaimoğlu, Z.; Akyüz, A.; Üstün, S.; Çaylı, A. Comparison of greenhouse fuel consumption calculated using different methods with actual fuel consumption. Turk. J. Agric. Food Sci. Technol. 2018, 7, 850–857. [Google Scholar] [CrossRef]
- Hansson, P.A.; Lindgren, M.; Norén, O. A comparison between different methods of calculating average engine emissions for agricultural tractors. J. Agric. Eng. 2001, 1, 80. [Google Scholar]
- Coelho, M.C.; Farias, T.L.; Rouphail, N.M. Effect of roundabout operations on pollutant emissions. Transp. Res. D Transp. Environ. 2006, 11, 333–343. [Google Scholar] [CrossRef]
- Galindo, J.; Lujan, J.M.; Serrano, J.R.; Dolz, V.; Guilain, S. Description of a heat transfer model suitable to calculate transient processes of turbocharged diesel engines with one-dimensional gas-dynamic codes. Appl. Therm. Eng. 2006, 26, 66–76. [Google Scholar] [CrossRef]
- Açıkgöz, B.; Çelik, C.; Soyhan, H.S.; Gökalp, B.; Karabağ, B. Emission characteristics of a hydrogen–CH4 fuelled spark ignition engine. Fuel 2015, 159, 298–307. [Google Scholar] [CrossRef]
- Chewning, S.R. Micro Adiabatic Combustion Engine: Concept Development, Simulation and Combustion Experiments. Ph.D. Thesis, Oregon State University, Corvallis, OR, USA, 2009. [Google Scholar]
- Abedin, M.J.; Masjuki, H.H.; Kalam, M.A.; Sanjid, A.; Rahman, S.A.; Masum, B.M. Energy balance of internal combustion engines using alternative fuels. Int. J. Simul. Syst. Sci. Technol. 2013, 26, 20–33. [Google Scholar] [CrossRef]
- Bertana, M.; Truchot, B.; Marlair, G. Comparison of the fire consequences of an electric vehicle and an internal combustion engine vehicle. In Proceedings of the International Conference on Fires in Vehicles, Chicago, IL, USA, 27–28 September 2012. [Google Scholar]
- Janhunen, T.T. Ultra-Low Nox Hcci-Combustion in the Z Engine; SAE Technical Paper; SAE: Warrendale, PA, USA, 2012. [Google Scholar]
- Sim, K.; Koo, B.; Kim, C.H.; Kim, T.H. Development and performance measurement of micro-power packusing micro-gas turbine driven automotive alternators. Appl. Energy 2013, 103, 309–319. [Google Scholar] [CrossRef]
- Galindo, J.; Serrano, J.R.; Climent, H.; Varnier, O. Impact of two-stage turbocharging architectures on pumping losses of automotive engines based on an analytical model. Energy Convers. Manag. 2010, 51, 1958–1969. [Google Scholar] [CrossRef]
- Fu, J.; Liu, J.; Yang, Y.; Ren, C.; Zhu, G. A new approach for exhaust energy recovery of internal combustion engine: Steam turbocharging. Appl. Therm. Eng. 2013, 52, 150–159. [Google Scholar] [CrossRef]
- Boretti, A.; Scalco, J. Piston and Valve Deactivation for Improved Part Load Performances of Internal Combustion Engines; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Ibrahim, H.; Ilinca, A.; Perron, J. Moteur Diesel Suralimenté Bases et Calculs Cycles Réel, Théorique et Thermodynamique; Université du Québec à Rimouski: Rimouski, QC, Canada, 2006. [Google Scholar]
- Hanselman, D. Minimum torque ripple, maximum efficiency excitation of brushless permanent magnet motors. IEEE Trans. Ind. Electron. 1994, 41, 292–300. [Google Scholar] [CrossRef]
- Rigacci, M.; Sato, R.; Shirase, K. Experimental evaluation of mechanical and electrical power consumption of feed drive systems driven by a ball-screw. Precis. Eng. 2020, 64, 280–287. [Google Scholar] [CrossRef]
- Mohammed, K.G. Mechanical and electrical design calculations of hybrid vehicles. In Applied Electromechanical Devices and Machines for Electric Mobility Solutions; IntechOpen: London, UK, 2020. [Google Scholar]
- Chung, C.T.; Wu, C.H.; Hung, Y.H. Evaluation of driving performance and energy efficiency for a novel full hybrid system with dual-motor electric drive and integrated input- and output-split e-CVT. Energy 2020, 191, 116508. [Google Scholar] [CrossRef]
- Daguse, B. Modélisation Analytique Pour le Dimensionnement par Optimisation D’une Machine Dédiée à une Chaîne de Traction Hybride à Dominante Électrique. Ph.D. Thesis, Ecole Doctorale Sciences et Technologies de l’Information des Télécommunications et des Systèmes, Paris, France, 2013. [Google Scholar]
- Chouchane, M.; Primo, E.N.; Franco, A.A. Mesoscale effects in the extraction of the solid-state lithium diffusion coefficient values of battery active materials: Physical insights from 3D modeling. J. Phys. Chem. Lett. 2020, 11, 2775–2780. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Tang, S.; Li, L.; Liu, F.; Jiang, L.; Jia, M. Simulation and parameter identification based on electrochemical- thermal coupling model of power lithium ion-battery. J. Alloy. Compd. 2020, 844, 156003. [Google Scholar] [CrossRef]
- Li, A. Analyse Expérimentale et Modélisation d’Eléments de Batterie et de Leurs Assemblages: Application Aux Véhicules Electriques Et Hybrides. Ph.D. Thesis, L’Universite Claude Bernard, Lyon, France, 2006. [Google Scholar]
- Urbain, M. Modélisation Electrique et Energétique des Accumulateurs Li-Ion. Estimation en Ligne de la SOC et de la SOHL. Ph.D. Thesis, Institut National Polytechnique de Lorraine, Lorraine, France, 2009. [Google Scholar]
- Fathollahzadeh, H.; Mobli, H.; Rajabipour, A.; Minaee, S.; Jafari, A.; Tabatabaie, S.M.H. Average and instantaneous fuel consumption of Iranian conventional tractor with moldboard plow in tillage. ARPN J. Eng. Appl. Sci. 2010, 5, 30–35. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Air density | |
| Sx | Active area of the vehicle for air resistance |
| Cx | Coefficient of drag for longitudinal axis translation |
| Cz | Coefficient of drag for translation on the vertical axis |
| Wx | Stirring coefficient for the translation on the longitudinal axis |
| Wz | Stirring coefficient for translation on the vertical axis |
| Front-wheel torque | |
| Rear-wheel torque | |
| Front-wheel radius | |
| Rear-wheel radius | |
| Mass of the vehicle | |
| Gravity | |
| Slope angle in rad | |
| Angle of slope in % | |
| Longitudinal speed of the vehicle | |
| Viscous coefficient of friction | |
| Rolling resistance force | |
| Coefficients of rolling friction | |
| Vertical wind coefficient | |
| Wind speed | |
| Resistive force from the connected tool | |
| Trail mass capture | |
| Rear-wheel inertia | |
| Front-wheel inertia | |
| Driving force | |
| Braketorq | Braking torque required by the driver [Nm] |
| Torbrakdrv | Driver brake control [Nm] |
| Maxtorqveh | Maximum braking torque of the vehicle [Nm] |
| Sommetorq | Torque required by the driver [Nm] |
| Torvehdrv | Driver acceleration control [W or Nm] |
| tmaxMel | Maximum engine torque [Nm] |
| Braketorq | Braking torque required by the driver [Nm] |
| sensorMErev | Speed of the electric motor [rpm] |
| Tpull | Torque of the electric motor for lifting [Nm] |
| sensorME | Speed of the electric motor [rad/s] |
| Gearratio | Transmission ratio between the electric motor and the vehicle |
| torME | Torque control of the electric motor [Nm] |
| Gainaccel | Gain on acceleration control |
| tmaxMel | Maximum engine torque [Nm] |
| Gearatio | Transmission ratio between the electric motor and the vehicle |
| Torbrak | Brake control |
| Gainbrakes | Gain on brake control |
| Maxtorqveh | Maximum braking torque of the vehicle [Nm] |
| tminMel | Minimum engine torque |
| tmaxMth | Maximum engine torque [Nm] |
| throttleMT | Thermal engine load |
| Gainacce | Gain on acceleration control |
| Clutchsig | Clutch control |
| starteng | Firing: engine on/off |
| torME | Torque control of the electric motor [Nm] |
| torbrak | Brake control |
| maxtorqveh | Maximum braking torque of the vehicle [Nm] |
| sensorME | Rotational speed of the electric motor [rad/s] |
| gainaccel | Gain on acceleration control |
| Rotational speed of the driven axle | |
| Drive axle transmission ratio | |
| Transmission ratio of the engaged gear | |
| Speed of rotation of the input shaft | |
| Speed of rotation of the secondary shaft | |
| Maximum Coulomb friction torque | |
| Relative rotational speed | |
| Speed threshold of the rotating stick | |
| Secondary shaft torque | |
| Efficiency of the engaged gear | |
| Loss of torque | |
| The transmission ratio of the engaged gear | |
| Drive axle transmission ratio | |
| Torque transmitted by the secondary shaft | |
| Coefficient of viscous friction on the flywheel | |
| Flywheel rotation speed | |
| Input shaft power | |
| Power to the drive axle | |
| Average effective brake pressure | |
| Mean effective friction pressure | |
| Engine output torque | |
| Engine friction torque | |
| Swept volume of the engine | |
| Maximum and minimum corrected torques | |
| Maximum engine torque read from the file | |
| Reference ambient air density | |
| Ambient air temperature | |
| Tref | Reference ambient temperature |
| Maximum engine torque [Nm] | |
| Frictional torque at high engine temperature [Nm] | |
| Frictional torque at the current temperature [Nm] | |
| “Hot engine temperature” parameter [degC] | |
| Current engine or oil temperature | |
| Actual fuel consumption | |
| Value read from the fuel file | |
| Overconsumption when starting the engine | |
| Effect of cold temperature (user-defined expression) | |
| Current equivalency report | |
| Value read from the data file | |
| Effect of cold temperature (user-defined expression) | |
| Exhaust gas mass flow rate [g/s] | |
| Fuel consumption [g/s] | |
| Stoichiometric air/fuel ratio [null] | |
| Motor speed [rpm] | |
| Engine idling speed [rpm] | |
| Fresh air mass flow rate at idle [g/s] | |
| Motor temperature [degC] | |
| High threshold for motor temperature parameter [degC] | |
| Low threshold for motor temperature parameter [degC] | |
| Correction coefficient for cold CO emission | |
| Coefficient of CO when enriching the fuel when starting the engine | |
| Overconsumption when starting the engine | |
| Value of CO | |
| Average effective friction pressure read in the [bar] file | |
| Temperature effect correction (user-defined expression) | |
| Exhaust gas temperature read in the [degC] file | |
| Temperature effect correction (user-defined expression) | |
| Combustion heat ratio for wall heating | |
| Fuel consumption [kg/s] | |
| Specific calorific value of the fuel [J/kg] | |
| Correction of the effect of temperature | |
| Fuel consumption [kg/s] | |
| HC emissions [kg/s] | |
| CO emissions [kg/s] | |
| Specific calorific value of the fuel [J/kg] | |
| Burnt exhaust gas | |
| Exhaust unburned air mass flow rate (when φ ≤ 1) | |
| Unburned fuel | Exhaust unburned fuel mass flow rate (when φ ≥ 1) |
| Thermal capacity of the flue gas set by the user [J/K/kg] for φ = 1 | |
| Heating capacity of the fuel set by the user [J/K/kg] | |
| Thermal capacity of fresh air and gas set at 1040.0 [J/K/kg] | |
| Total number of engine cylinders | |
| Number of deactivated cylinders | |
| Number of activated cylinders | |
| Maximum BMEP read from the file and corrected for temperature effects | |
| FMEP read from the file at current load and corrected for temperature effects | |
| FMEP at zero load | |
| and | Negative and positive torque corresponding to defined parameters |
| Couple | |
| Speed of rotation | |
| Electrical power | |
| SOC | State of charge |
| DOD | Depth of discharge |
| CPVO | Open-circuit voltage |
| V2 | Potential at negative pole [V] |
| fixedvoltage | Fixed battery voltage [V] |
| fixedcellvoltage | Fixed cell voltage [V]. |
| Seal | Number of cells in series |
| CPVObat | Open-circuit voltage read from the file/expression for the whole battery [V] |
| OCVcell | Open-circuit voltage read from the file/expression for a cell [V] |
| Rbat | Internal resistance read from the file/expression for the whole drum set [Ohm] |
| Rcell | Internal resistance read from the file/expression for a cell [Ohm] |
| I3 | Battery current at the positive pole [A] |
| Icell | Cellular current [A] |
| Cell | Number of cells in series |
| Cell | Number of parallel cells |
| Implement | Name of Implement | Maximal Velocity | The Needed Force for Implements |
|---|---|---|---|
 | Moldboard plow | 7 km/h | Draft power |
 | Bette Harvest | 8 km/h | PTO + Draft power |
 | Straw tub grinder | 0 km/h | PTO power |
| Brake Command: Signal [0.1] | Brake Command: Wheel Torque (Nm) | |
|---|---|---|
| braketorq |
| Sommetorq | |
|---|---|
| Acceleration signal command [0.1] | |
| Acceleration control: wheel power [W] | if |sensorMErev| < 1.0 in torvehdrv > 0 if |sensorMErev| < 1.0 in torvehdrv ≤ 0 if |sensorMErev| ≥ 1.0 |
| Acceleration control: wheel torque [Nm] |
| TorME | Torbrak | |
|---|---|---|
| Torque requested by the driver is positive (acceleration requested) | 0 | |
| Torque requested by the driver is negative or null (brake requested) and no gear is selected | 0 | |
| Torque requested by the driver is negative or null (brake requested) and no gear is selected | . |
| Sommetorq | |
|---|---|
| Acceleration command: signal [0.1] | |
| Acceleration command: wheel power [W] | Si |sensorMErev| < 5.0 and torvehdrv > 0 Si |sensorMErev| < 5.0 en torvehdrv ≤ 0 Si |sensorMErev| ≥ 5.0 |
| Acceleration command: wheel power [Nm] |
| ThrottleMT | Clutchsig | Starteng | |
|---|---|---|---|
| Torque requested by the driver is positive (acceleration requested). | 1 | 1 | |
| Torque requested by the driver is negative or null (acceleration requested). | 0 | 0 | 0 or 1 function of engdecel parameter |
| TorME | Torbrak | |
|---|---|---|
| Torque requested by the driver is positive (acceleration requested). | 0 | 0 |
| Torque requested by the driver is negative or null (brake requested) and no gear is selected. | 0 | |
| Torque requested by the driver is negative or null (brake requested) and the gear is selected. |
| Sommetorq | |
|---|---|
| Acceleration command: signal [0.1] | |
| Acceleration command: wheel power [W] | if |sensorMErev| < 1.0 and torvehdrv > 0 if |sensorMErev| < 1.0 and torvehdrv ≤ 0 if |sensorMErev| ≥ 1.0 |
| Acceleration command: wheel torque [Nm] |
| TorME | Torbrak | |
|---|---|---|
| Torque requested by the driver is positive (acceleration requested) | 0 | |
| Torque requested by the driver is negative or null (brake requested) and no gear is selected | 0 | |
| Torque requested by the driver is negative or null (brake requested) and no gear is selected |
| Sommetorq | |
|---|---|
| Acceleration command: signal [0.1]. | |
| Acceleration command: wheel power [W] | if |sensorMErev| < 1.0 and torvehdrv > 0 if |sensorMErev| < 1.0 and torvehdrv ≤ 0 if |sensorMErev| ≥ 1.0 |
| Acceleration command: wheel torque [Nm] |
| TorME | Torbrak | |
|---|---|---|
| Torque requested by the driver is positive (acceleration requested) and the torque requested for the engine is lower than the optimum torque. | 0 | |
| Torque requested by the driver is positive (acceleration requested) and torque requested for the engine is higher than the optimum torque. | 0 | 0 |
| Torque requested by the driver is negative or null (brake requested) and the gear is selected. | 0 |
| Throttlemt | Clutchsig | Starteng | |
|---|---|---|---|
| Torque requested by the driver is positive (acceleration requested) and the torque requested for the engine is lower than the optimum torque. | 1 | ||
| Torque requested by the driver is positive (acceleration requested) and the torque requested for the engine is higher than the optimum torque. | 1 | ||
| Torque requested by the driver is negative or null (brake requested). | 0 | 0 | 1 or 1 function of engdecel parameter |
| Positive Charge | Engine Brake |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zahidi, Y.; El Moufid, M.; Benhadou, S.; Medromi, H. An Assessment of Low-Cost Tractor Motorization with Main Farming Implements. World Electr. Veh. J. 2020, 11, 74. https://doi.org/10.3390/wevj11040074
Zahidi Y, El Moufid M, Benhadou S, Medromi H. An Assessment of Low-Cost Tractor Motorization with Main Farming Implements. World Electric Vehicle Journal. 2020; 11(4):74. https://doi.org/10.3390/wevj11040074
Chicago/Turabian StyleZahidi, Yassine, Mohamed El Moufid, Siham Benhadou, and Hicham Medromi. 2020. "An Assessment of Low-Cost Tractor Motorization with Main Farming Implements" World Electric Vehicle Journal 11, no. 4: 74. https://doi.org/10.3390/wevj11040074
APA StyleZahidi, Y., El Moufid, M., Benhadou, S., & Medromi, H. (2020). An Assessment of Low-Cost Tractor Motorization with Main Farming Implements. World Electric Vehicle Journal, 11(4), 74. https://doi.org/10.3390/wevj11040074