Design and Implementation of Reduced Grid Impact Charging Station for Public Transportation Applications




Abstract
:1. Introduction
1.1. General Context and Motivation
1.2. State of the Art
- from the point of view of the electricity network operator, who has to manage very high loads for short and intermittent times, as well as the impossibility of supplying the high powers due to an inadequate electricity network. A storage unit on the ground can reduce the demand for power to the network by contributing to the fast recharge of the bus and subsequently being recharged at lower power;
- for the charging mode, high energy and low charging times need automated systems that do not require the presence of an operator;
- for onboard storage units, due to the involved high energy, batteries with higher specific energy than most of the batteries available on the market are required, with a high number of life cycles at high currents and with a carefully sized cooling system.
1.3. Contribution
1.4. Paper Organization
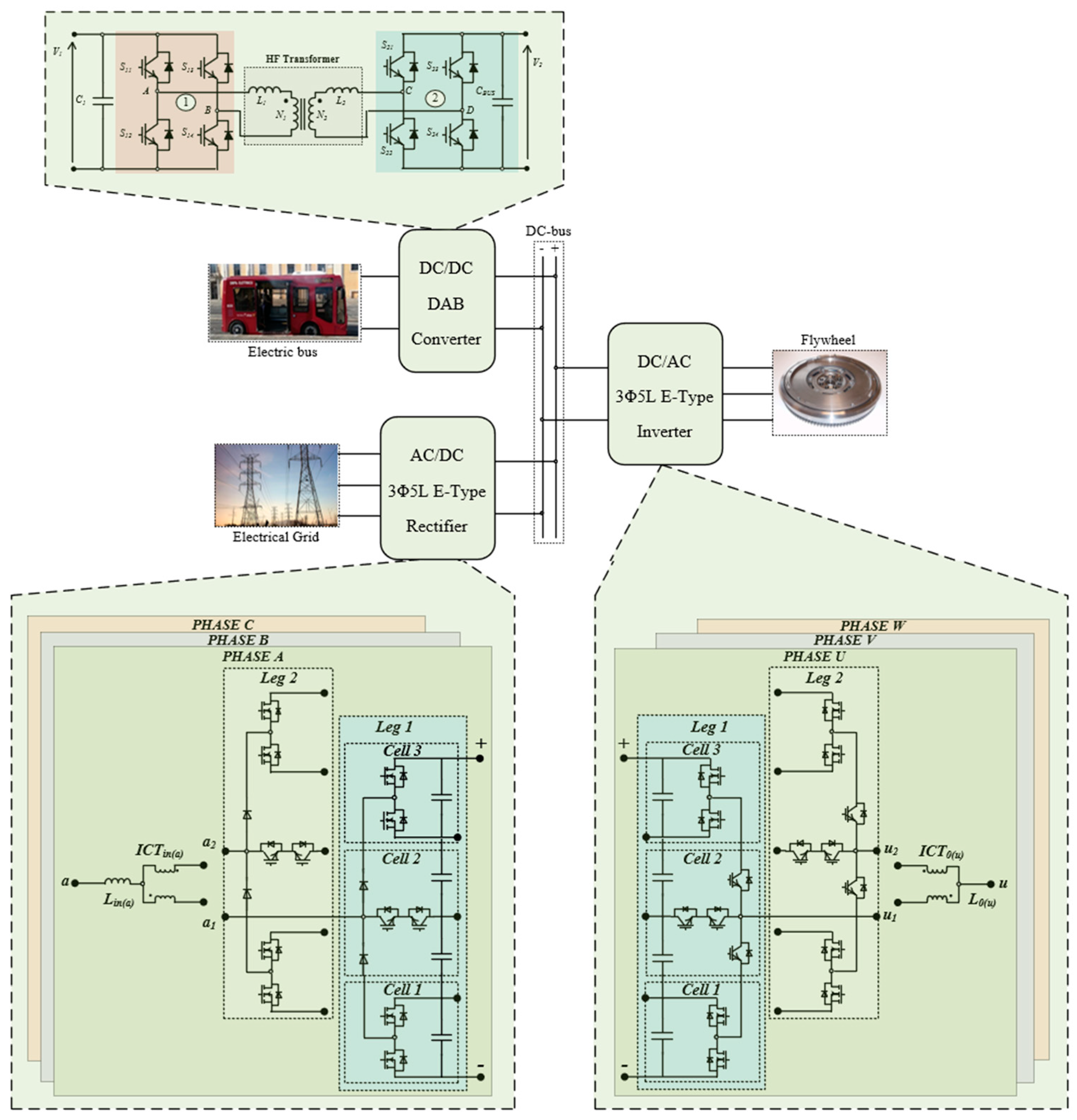
2. Charging Station
2.1. Multilevel Converters
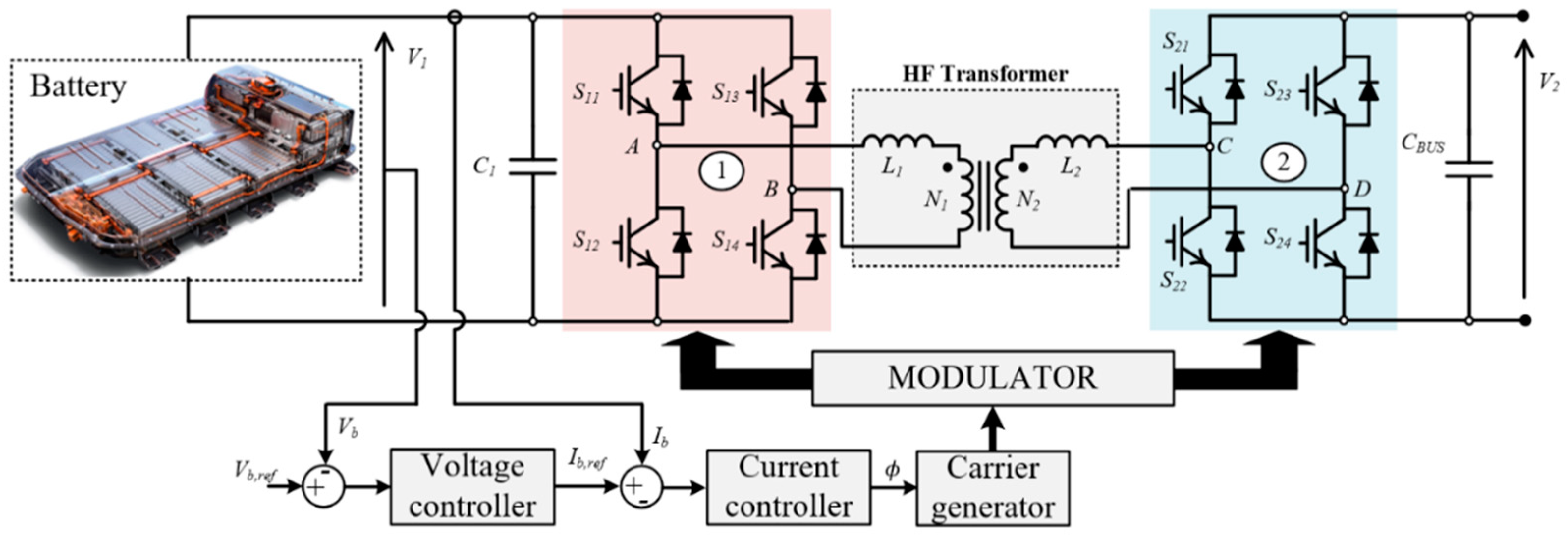
2.2. Dual Active Bridge Converter
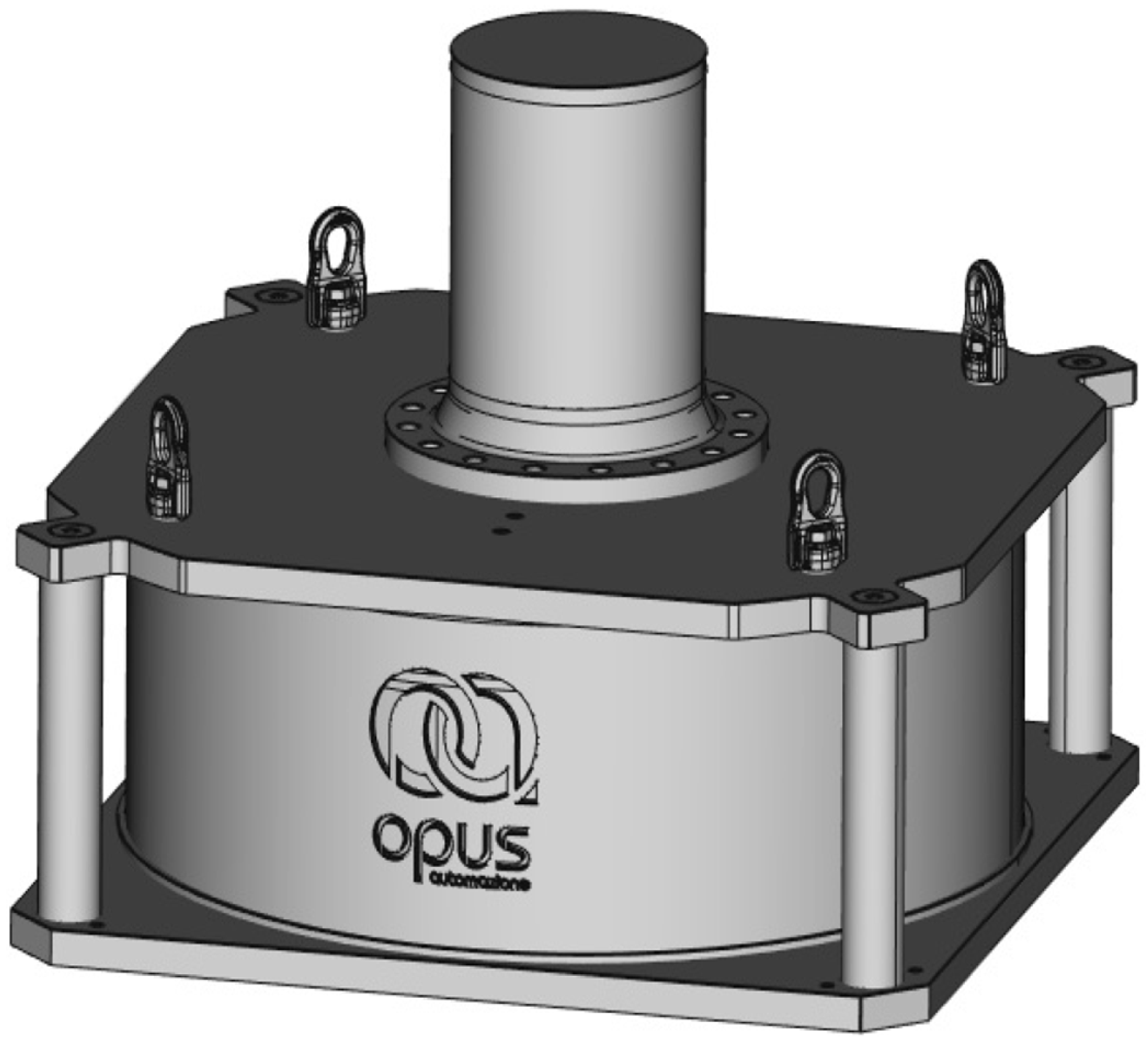
2.3. Flywheel Energy Storage System
3. Control System and Implementation
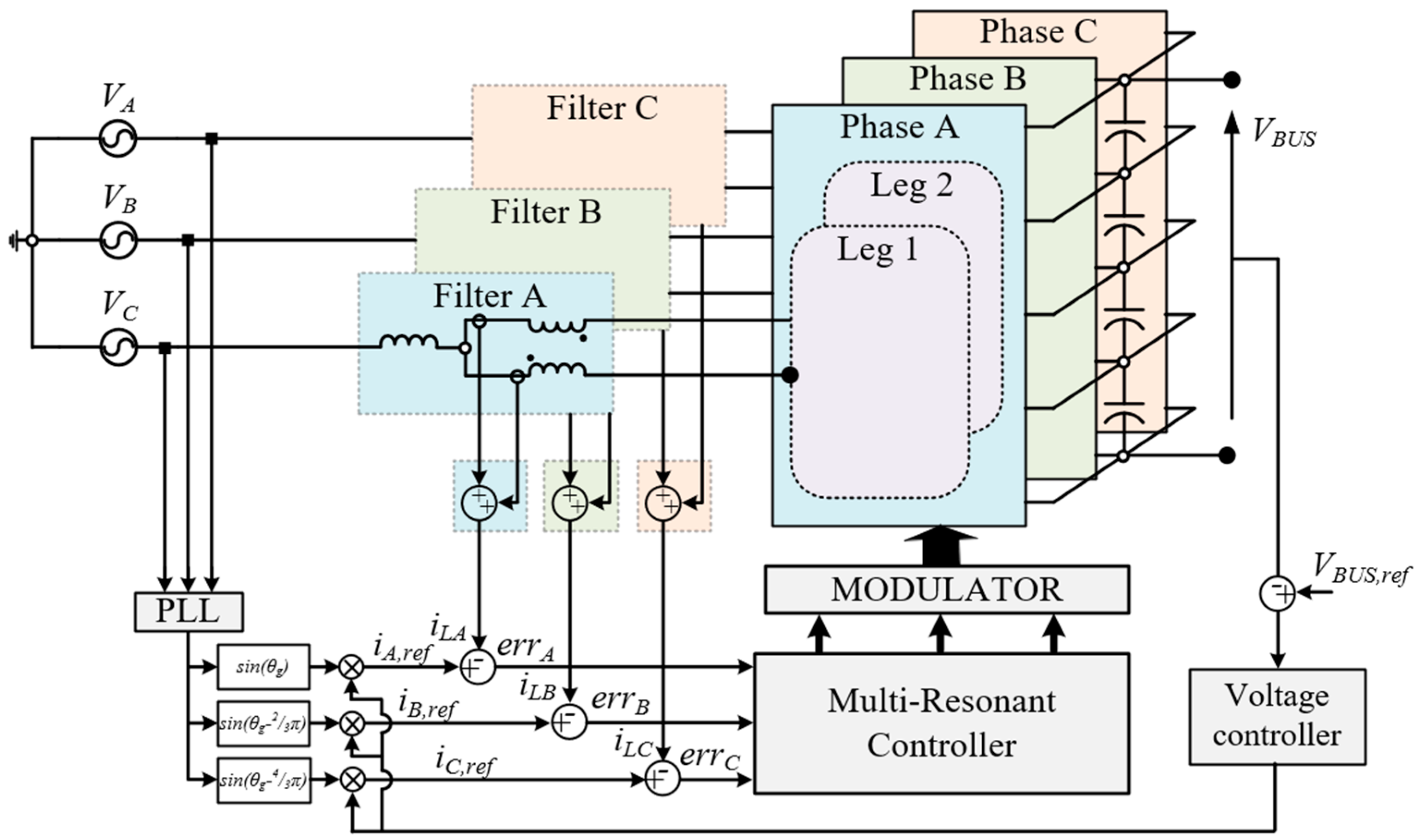
3.1. Control Tuning of the 3Φ5L E-Type Rectifier System
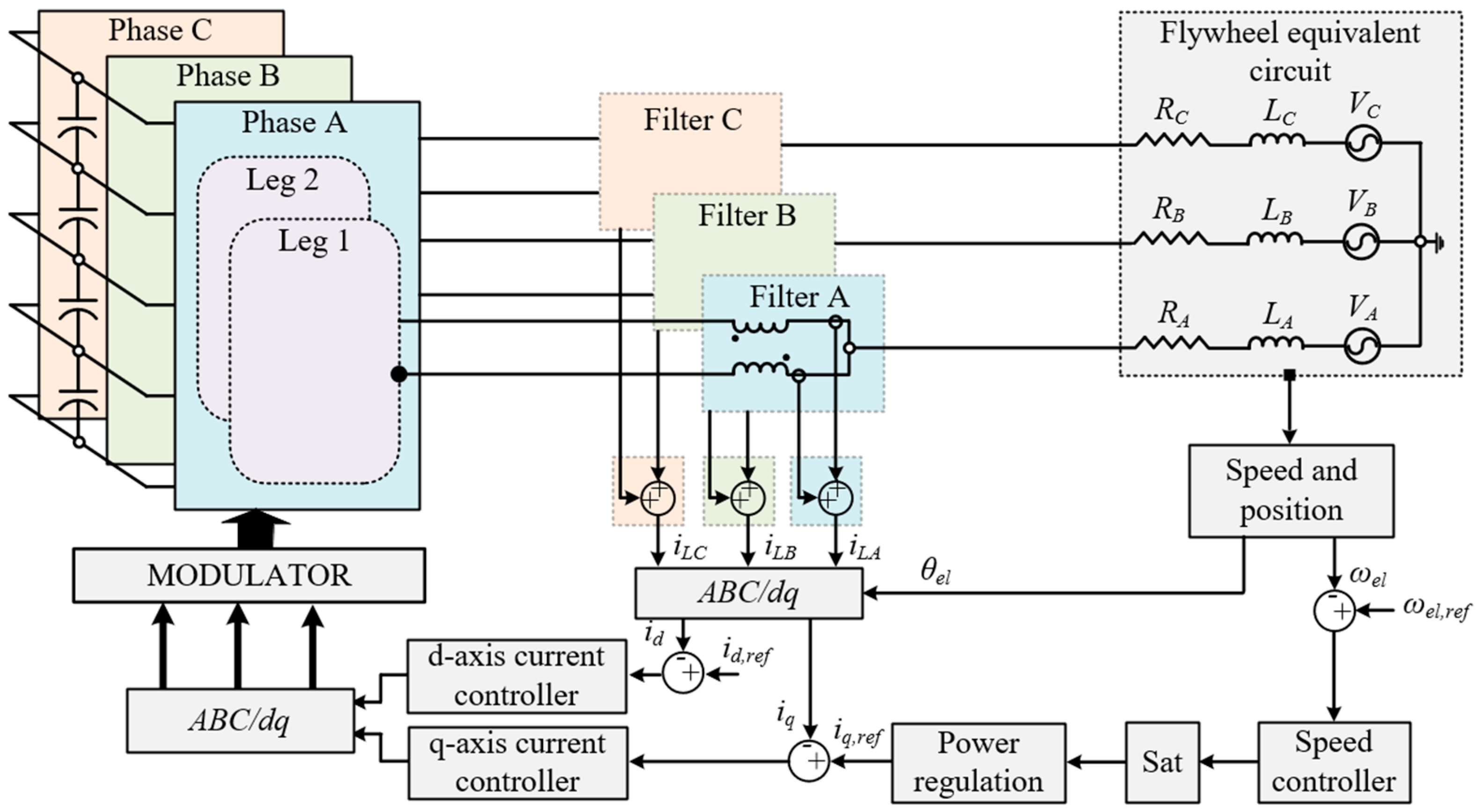
3.2. Control Tuning of the 3Φ5L E-Type Inverter System
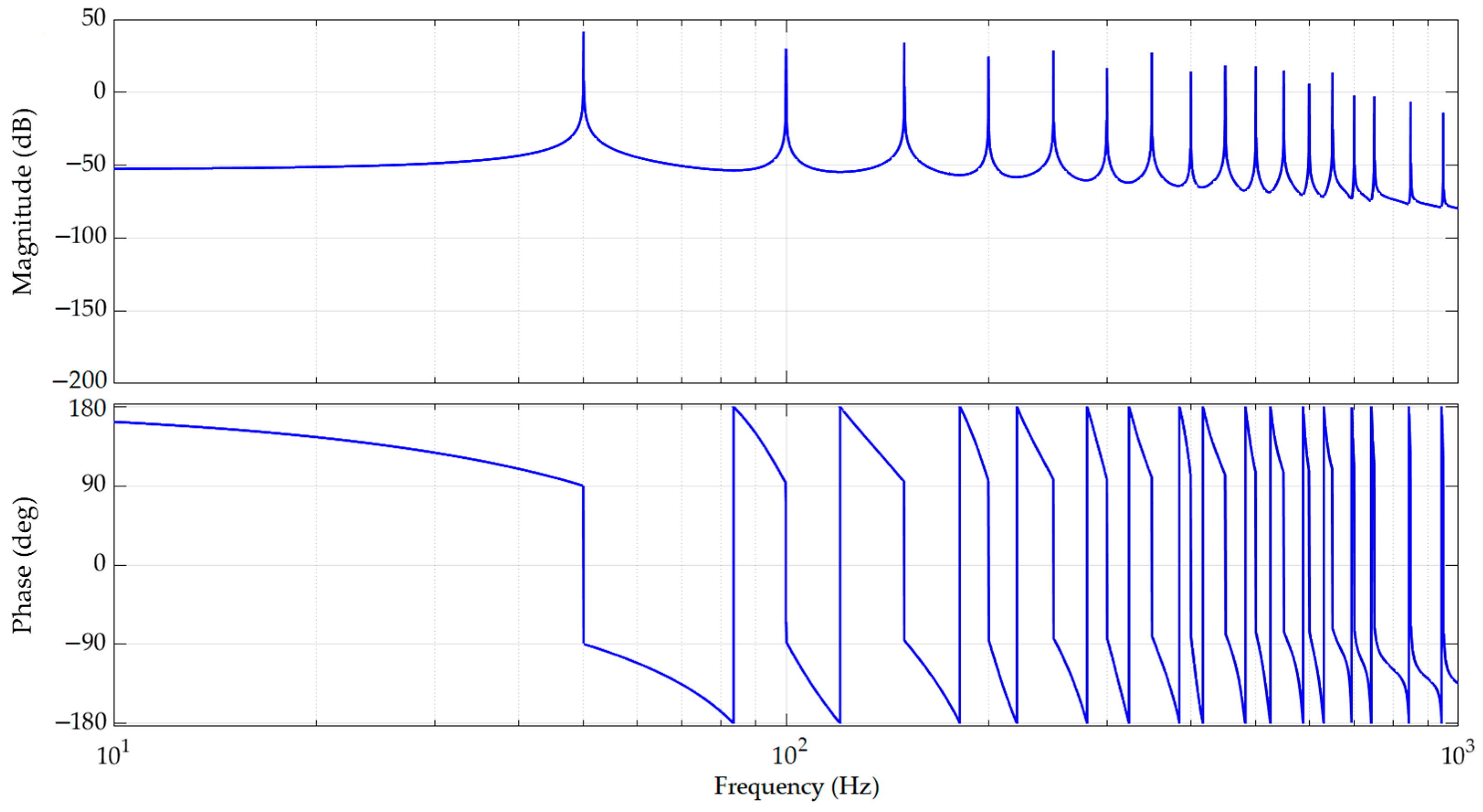
3.3. Control Tuning of DAB System
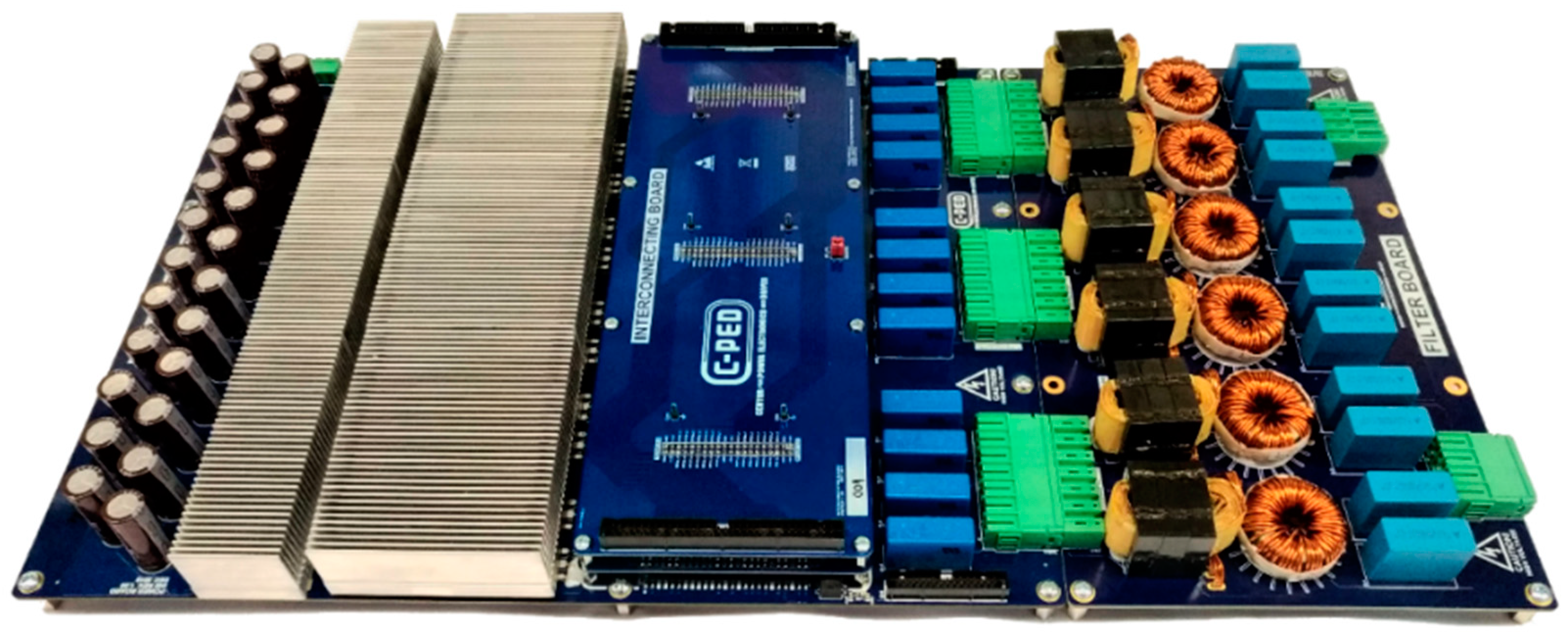
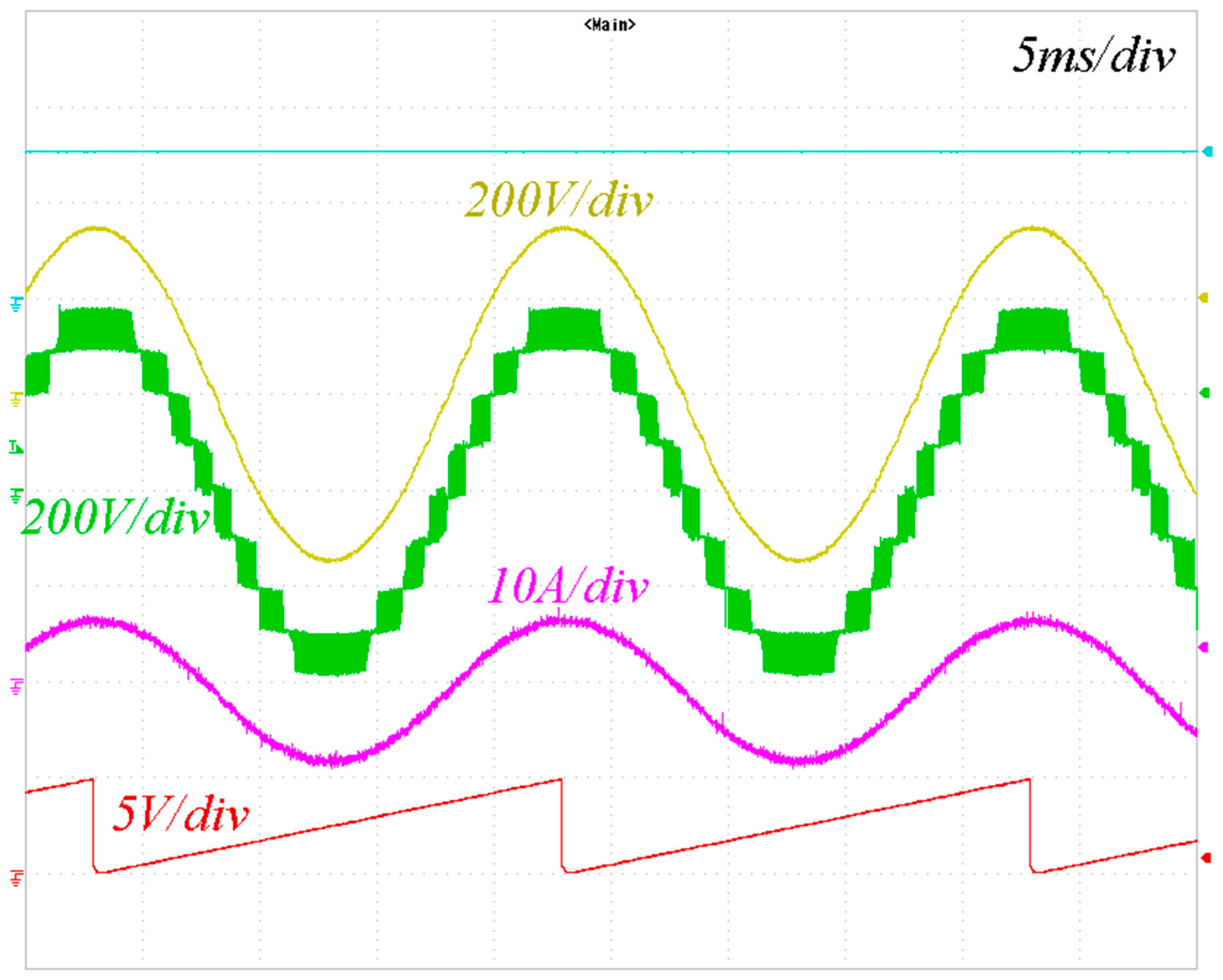
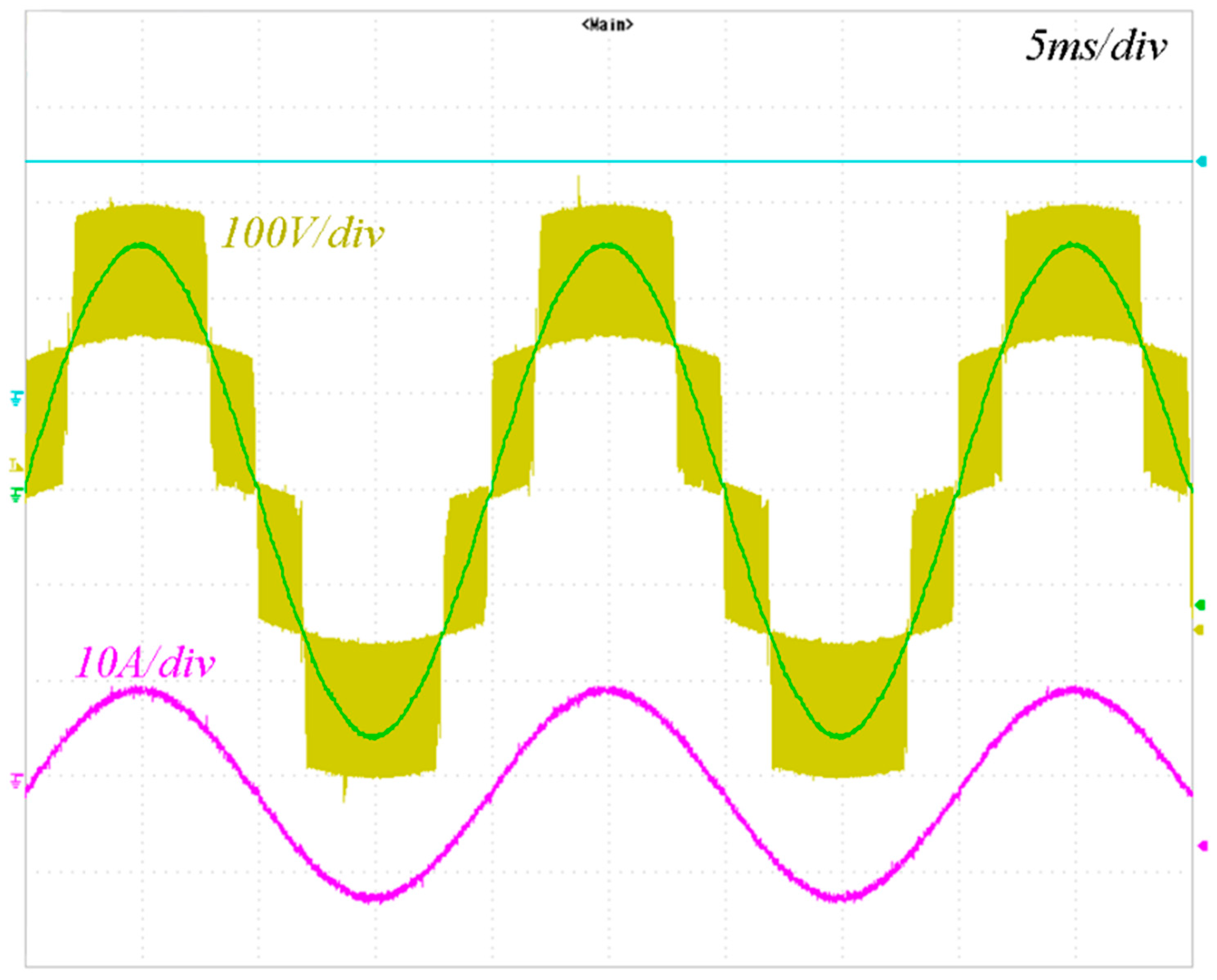
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Halilcevic, S.S.; Georgilakis, P.S. How and Why the Batteries in the Sectors of Photovoltaics and Electric Vehicles Could Have Impact on the Society. IEEE Milan Power Tech. 2019, 1–6. [Google Scholar] [CrossRef]
- Said, D.; Mouftah, H.T. A Novel Electric Vehicles Charging/Discharging Management Protocol Based on Queuing Model. IEEE Trans. Intell. Veh. 2020, 5, 100–111. [Google Scholar] [CrossRef]
- Liu, X. Dynamic Response Characteristics of Fast Charging Station-EVs on Interaction of Multiple Vehicles. IEEE Access 2020, 8, 42404–42421. [Google Scholar] [CrossRef]
- Moradzadeh, M.; Abdelaziz, M.M.A. A New MILP Formulation for Renewables and Energy Storage Integration in Fast Charging Stations. IEEE Trans. Transp. Electrif. 2020, 6, 181–198. [Google Scholar] [CrossRef]
- Jayakumar, A.; Chalmers, A.; Lie, T. Review of prospects for adoption of fuel cell electric vehicles in New Zealand. IET Electr. Syst. Transp. 2017, 7, 259–266. [Google Scholar] [CrossRef]
- Shakeel, F.M.; Malik, O.P. Vehicle-To-Grid Technology in a Micro-grid Using DC Fast Charging Architecture. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019; IEEE: New York, NY, USA, 2019; pp. 1–4. [Google Scholar]
- Amanor-Boadu, J.M.; Abouzied, M.A.; Sanchez-Sinencio, E. An Efficient and Fast Li-Ion Battery Charging System Using Energy Harvesting or Conventional Sources. IEEE Trans. Ind. Electron. 2018, 65, 7383–7394. [Google Scholar] [CrossRef]
- Yao, L.W.; Aziz, J.A.; Kong, P.Y.; Idris, N.R.N.; Alsofyani, I.M. Modeling of lithium titanate battery for charger design. In Proceedings of the 2014 Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 28 September–1 October 2014; IEEE: New York, NY, USA, 2014; pp. 1–5. [Google Scholar]
- Nadeem, F.; Hussain, S.M.S.; Tiwari, P.K.; Goswami, A.K.; Ustun, T.S. Comparative Review of Energy Storage Systems, Their Roles, and Impacts on Future Power Systems. IEEE Access 2019, 7, 4555–4585. [Google Scholar] [CrossRef]
- Pei Yulong, A.; Cavagnino, S.; Vaschetto, C.F.; Tenconi, A. Flywheel energy storage systems for power systems ap-plication. In Proceedings of the 2017 6th International Conference on Clean Electrical Power (ICCEP), Santa Margherita Ligure, Liguria, Italy, 27–29 June 2017; pp. 492–501. [Google Scholar]
- Krishna, K.S.; Vijayasree, G. Fast Charging Stations Supported By Flywheel Energy Storage Systems. In Proceedings of the 2020 IEEE 5th International Conference on Computing Communication and Automation (ICCCA), Galgotias University, Grater Noida, India, 30–31 October 2020; IEEE: New York, NY, USA, 2020; pp. 109–113. [Google Scholar]
- Iyer, V.M.; Gulur, S.; Gohil, G.; Bhattacharya, S. An Approach towards Extreme Fast Charging Station Power Delivery for Electric Vehicles with Partial Power Processing. IEEE Trans. Ind. Electron. 2020, 67, 8076–8087. [Google Scholar] [CrossRef]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme Fast Charging of Electric Vehicles: A Technology Overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Ortenzi, F.; Pasquali, M.; Prosini, P.P.; Lidozzi, A.; Di Benedetto, M. Design and Validation of Ultra-Fast Charging Infra-structures Based on Supercapacitors for Urban Public Transportation Applications. Energies 2019, 12, 2348. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.; Yu, F.; Lin, Z.; Wu, G.; Chen, H.; Hashimoto, S. Analysis and design of power management scheme for an on-board solar energy storage system. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014–ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; IEEE: New York, NY, USA, 2014; pp. 1471–1475. [Google Scholar]
- Obando, A.F.; Herrera, V.I.; Gaztanaga, H.; Gallardo, G.; Nieva, T.; Varela, M. Optimization Methodology of Infrastruc-ture and Onboard Energy Storage System for Cost-Reduction in Tramway Lines Design. In Proceedings of the 2017 IEEE Vehicle Power and Pro-pulsion Conference (VPPC), Belfort, France, 11–14 December 2017; pp. 1–7. [Google Scholar]
- Kampeerawar, W.; Koseki, T.; Zhou, F. Efficient Urban Railway Design integrating Train Scheduling, Onboard Energy Storage, and Traction Power Management. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018–ECCE Asia), Niigata, Japan, 20–24 May 2018; IEEE: New York, NY, USA, 2018; pp. 3257–3264. [Google Scholar]
- Mei, J.; Cheng, E.K.W.; Fong, Y.C. Lithium-titanate battery (LTO): A better choice for high current equipment. In Proceedings of the 2016 International Symposium on Electrical Engineering (ISEE), Hong Kong, China, 14 December 2016; IEEE: New York, NY, USA, 2017; pp. 1–4. [Google Scholar]
- Cignini, F.; Genovese, A.; Ortenzi, F.; Alessandrini, A.; Berzi, L.; Pugi, L.; Barbieri, R. Experimental Data Comparison of an Electric Minibus Equipped with Different Energy Storage Systems. Batteries 2020, 6, 26. [Google Scholar] [CrossRef]
- Ortenzi, F.; Andrenacci, N.; Pasquali, M.; Villante, C. On the Hybridization of Microcars with Hybrid UltraCapacitors and Li-Ion Batteries Storage Systems. Energies 2020, 13, 3230. [Google Scholar] [CrossRef]
- Liu, Y.; Tang, Y.; Shi, J.; Shi, X.; Deng, J.; Gong, K. Application of Small-Sized SMES in an EV Charging Station With DC Bus and PV System. IEEE Trans. Appl. Supercond. 2014, 25, 1–6. [Google Scholar] [CrossRef]
- Sun, B.; Dragičević, T.; Freijedo, F.D.; Vasquez, J.C.; Guerrero, J.M. A Control Algorithm for Electric Vehicle Fast Charg-ing Stations Equipped with Flywheel Energy Storage Systems. IEEE Trans. Power Electron. 2016, 31, 6674–6685. [Google Scholar] [CrossRef] [Green Version]
- Stroe, A.; Stroe, D.; Knap, V.; Swierczynski, M.; Teodorescu, R. Accelerated Lifetime Testing of High-Power Lithium Titan-ate Oxide Batteries. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 3857–3863. [Google Scholar]
- Lu, F.; Liu, D.; Liu, Y.; Li, Z.; Jiang, Q.; Chen, Y. A Study on Low-Temperature Model Parameter Identification of LTO Bat-tery by Cuckoo Search. In Proceedings of the 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020; pp. 490–494. [Google Scholar]
- Zhang, X.; Peng, H.; Wang, H.; Ouyang, M. Hybrid Lithium Iron Phosphate Battery and Lithium Titanate Battery Systems for Electric Buses. IEEE Trans. Veh. Technol. 2017, 67, 956–965. [Google Scholar] [CrossRef]
- Di Benedetto, M.; Solero, L.; Crescimbini, F.; Lidozzi, A.; Grbovic, P.J. 5-Level E-type back to back power converters—A new solution for extreme efficiency and power density. In Proceedings of the 2017 13th Conference on Ph.D. Research in Microelectronics and Electronics (PRIME), Taormina, Italy, 12–15 June 2017; IEEE: New York, NY, USA, 2017; pp. 341–344. [Google Scholar]
- Di Benedetto, M.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Grbovic, P.J. Low Volume and Low Weight 3-Phase 5-Level Back to Back E-Type Converter. IEEE Trans. Ind. Appl. 2019, 55, 7377–7388. [Google Scholar] [CrossRef]
- Deng, F.; Lu, Y.; Liu, C.; Heng, Q.; Yu, Q.; Zhao, J. Overview on submodule topologies, modeling, modulation, control schemes, fault diagnosis, and tolerant control strategies of modular multilevel converters. Chin. J. Electr. Eng. 2020, 6, 1–21. [Google Scholar] [CrossRef]
- Di Benedetto, M.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Grbovic, P.J. Five-level back to back E-Type converter for high speed gen-set applications. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; IEEE: New York, NY, USA, 2016; pp. 3409–3414. [Google Scholar]
- Di Benedetto, M.; Lidozzi, A.; Solero, L.; Grbovic, P.J.; Bifaretti, S. ISOP DC-DC converters equipped 5-level unidirectional T-Rectifier for aerospace applications. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, Canada, 20–24 September 2015; IEEE: New York, NY, USA, 2015; pp. 1694–1700. [Google Scholar]
- Liu, G.; Li, K.; Wang, Y.; Luo, H.; Luo, H. Recent advances and trend of HEV/EV-oriented power semiconductors—An overview. IET Power Electron. 2020, 13, 394–404. [Google Scholar] [CrossRef]
- Kucka, J.; Karwatzki, D.; Mertens, A. Enhancing the Reliability of Modular Multilevel Converters Using Neutral Shift. IEEE Trans. Power Electron. 2017, 32, 8953–8957. [Google Scholar] [CrossRef]
- Di Benedetto, M.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Grbovic, P.G. Low-Frequency State-Space Model for the Five-Level Unidirectional T-Rectifier. IEEE Trans. Ind. Appl. 2017, 53, 1127–1137. [Google Scholar] [CrossRef]
- Di Benedetto, M.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Grbovic, P.J. Small-Signal Model of the Five-Level Unidirectional T-Rectifier. IEEE Trans. Power Electron. 2017, 32, 5741–5751. [Google Scholar] [CrossRef]
- Bal, S.; Yelaverthi, D.B.; Rathore, A.K.; Srinivasan, D. Improved Modulation Strategy Using Dual Phase Shift Modulation for Active Commutated Current-Fed Dual Active Bridge. IEEE Trans. Power Electron. 2018, 33, 7359–7375. [Google Scholar] [CrossRef]
- La Mendola, M.; Di Benedetto, M.; Lidozzi, A.; Solero, L.; Bifaretti, S. Four-Port Bidirectional Dual Active Bridge Converter for EVs Fast Charging. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; IEEE: New York, NY, USA, 2019; pp. 1341–1347. [Google Scholar]
- Nguyen, D.-D.; Yukita, K.; Katou, A.; Yoshida, S. Design Optimization of a Three-Phase Dual-Active-Bridge Converter for Charging Stations. In Proceedings of the 2019 IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019; pp. 1–6. [Google Scholar]
- Di Benedetto, M.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Bifaretti, S. Hardware design of SiC-based Four-Port DAB Con-verter for Fast Charging Station. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 1231–1238. [Google Scholar]
- Gill, L.; Ikari, T.; Kai, T.; Li, B.; Ngo, K.; Dong, D. Medium Voltage Dual Active Bridge Using 3.3 kV SiC MOSFETs for EV Charging Application. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; IEEE: New York, NY, USA, 2019; pp. 1237–1244. [Google Scholar]
- Amamra, S.-A.; Marco, J. Vehicle-to-Grid Aggregator to Support Power Grid and Reduce Electric Vehicle Charging Cost. IEEE Access 2019, 7, 178528–178538. [Google Scholar] [CrossRef]
- Ghosh, A.; Aggarwal, V. Menu-Based Pricing for Charging of Electric Vehicles with Vehicle-to-Grid Service. IEEE Trans. Veh. Technol. 2018, 67, 10268–10280. [Google Scholar] [CrossRef] [Green Version]
- Bifaretti, S.; Lidozzi, A.; Solero, L.; Crescimbini, F. Anti-Islanding Detector Based on a Robust PLL. IEEE Trans. Ind. Appl. 2014, 51, 398–405. [Google Scholar] [CrossRef]
- Lidozzi, A.; Solero, L.; Crescimbini, F. Adaptive Direct-Tuning Control for Variable-Speed Diesel-Electric Generating Units. IEEE Trans. Ind. Electron. 2011, 59, 2126–2134. [Google Scholar] [CrossRef]
- Lidozzi, A.; Di Benedetto, M.; Bifaretti, S.; Solero, L.; Crescimbini, F. Resonant Controllers with Three Degrees of Freedom for AC Power Electronic Converters. IEEE Trans. Ind. Appl. 2015, 51, 4595–4604. [Google Scholar] [CrossRef]
- Lidozzi, A.; Serrão, V.; Solero, L.; Crescimbini, F.; Di Napoli, A. Direct Tuning Strategy for PMSM Drives. IEEE Ind. Appl. Soc. Annu. Meet. 2008, 1–7. [Google Scholar] [CrossRef]
- Solero, L.; Lidozzi, A.; Pomilio, J. Design of multiple-input power converter for hybrid vehicles. Ninet. Annu. IEEE Appl. Power Electron. Conf. Expo. APEC 2004, 20, 1007–1016. [Google Scholar] [CrossRef]
- Grbovic, P.G.; Lidozzi, A.; Solero, L.; Crescimbini, F. Five-Level Unidirectional T-Rectifier for High-Speed Gen-Set Appli-cations. IEEE Trans. Ind. Appl. 2016, 52, 1642–1651. [Google Scholar] [CrossRef]
- Di Benedetto, M.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Grbovic, P.J. Design of High-Power Density Interleaved 3-Phase 5-Level E-Type Back-to-Back Converter. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; IEEE: New York, NY, USA, 2020; pp. 3957–3964. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
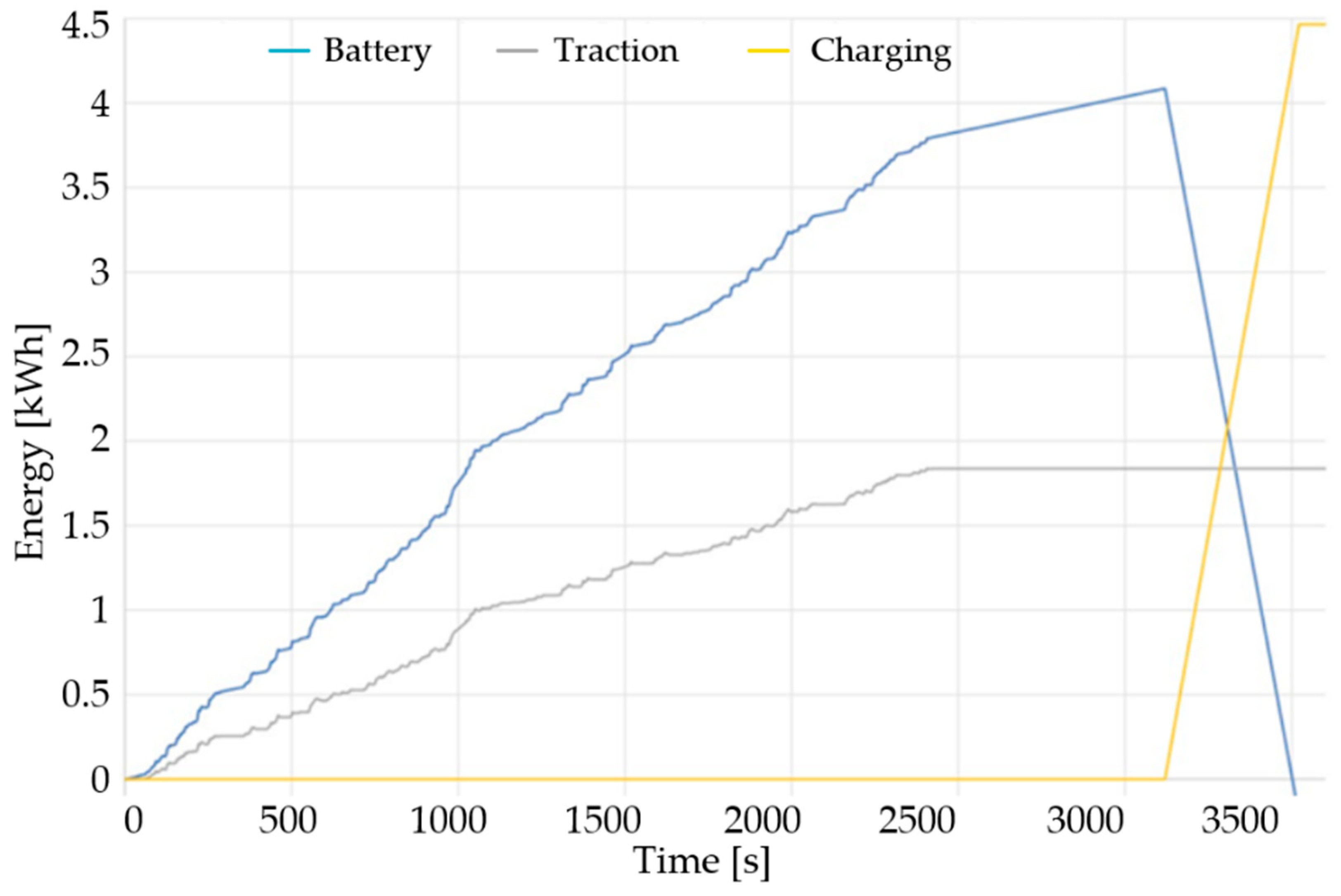
| Time [s] | 3600 |
| Avg Speed [km/h] | 12.4 |
| Max Speed [km/h] | 60 |
| Distance [km] | 8.34 |
| Avg [kW] | 2.78 |
| Battery energy [kWh] | 3.98 |
| Battery [kWh/km] | 0.481 |
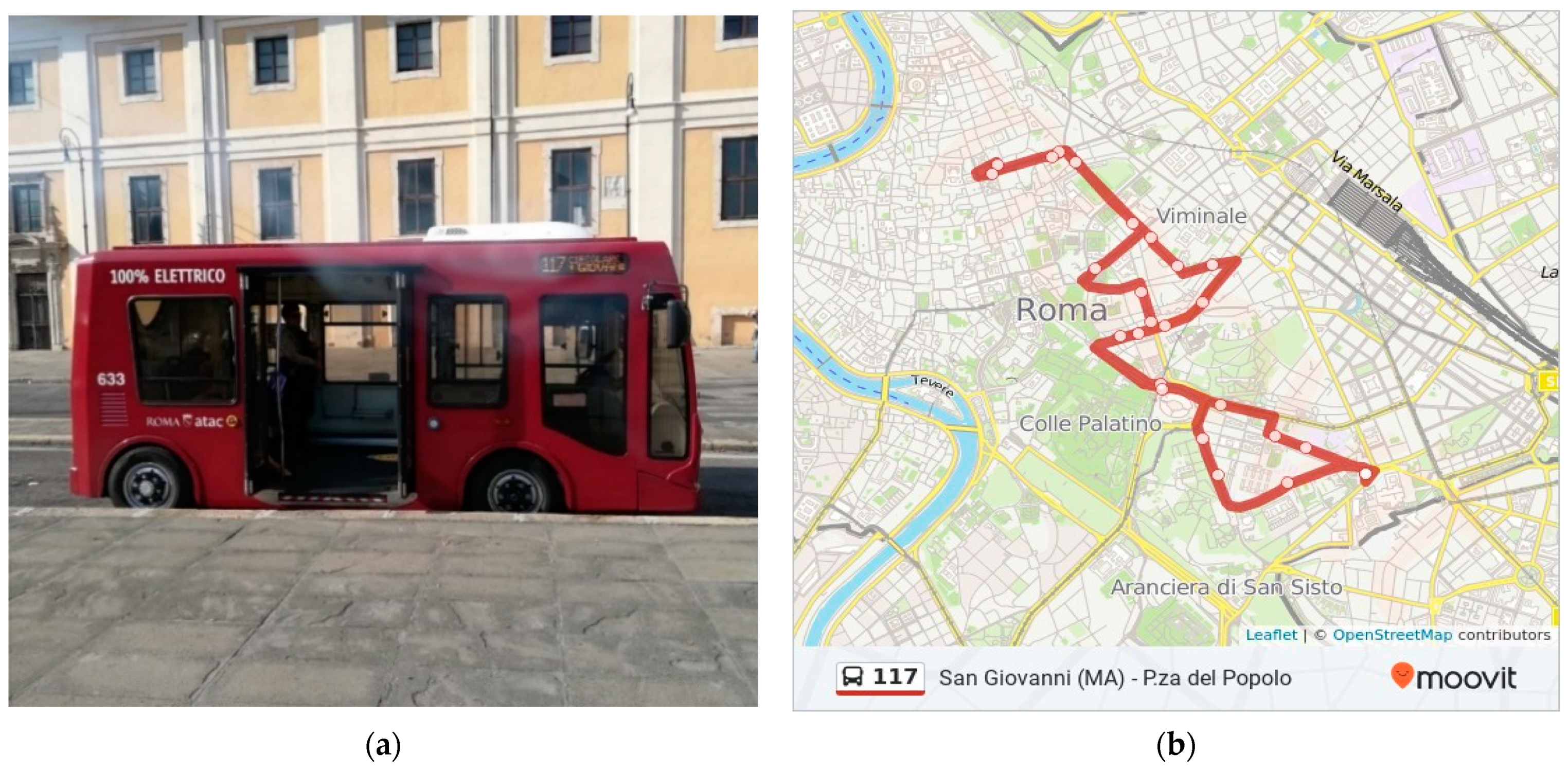
| Length [m] | 5.3 |
| Width [m] | 2.07 |
| Height [m] | 2.58 |
| Max passenger capacity | 28 |
| Gross Vehicle Weight (GVW) [kg] | 5826 |
| Parameter | Value |
|---|---|
| Range speed [rpm] | 2000–4000 |
| PMSM pole pairs | 4 |
| Density [g/cm3] | 7.68 |
| Total mass [kg] | 2300 |
| Moment of inertia [kg∙m2] | 171 |
| Energy [kJ] | 9800 |
| Power [kW] | 25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benedetto, M.d.; Ortenzi, F.; Lidozzi, A.; Solero, L. Design and Implementation of Reduced Grid Impact Charging Station for Public Transportation Applications. World Electr. Veh. J. 2021, 12, 28. https://doi.org/10.3390/wevj12010028
Benedetto Md, Ortenzi F, Lidozzi A, Solero L. Design and Implementation of Reduced Grid Impact Charging Station for Public Transportation Applications. World Electric Vehicle Journal. 2021; 12(1):28. https://doi.org/10.3390/wevj12010028
Chicago/Turabian StyleBenedetto, Marco di, Fernando Ortenzi, Alessandro Lidozzi, and Luca Solero. 2021. "Design and Implementation of Reduced Grid Impact Charging Station for Public Transportation Applications" World Electric Vehicle Journal 12, no. 1: 28. https://doi.org/10.3390/wevj12010028
APA StyleBenedetto, M. d., Ortenzi, F., Lidozzi, A., & Solero, L. (2021). Design and Implementation of Reduced Grid Impact Charging Station for Public Transportation Applications. World Electric Vehicle Journal, 12(1), 28. https://doi.org/10.3390/wevj12010028