Conceptual Design Optimization of Autonomous Electric Buses in Public Transportation


Abstract
:1. Introduction
2. Methodology
2.1. Derivation of Properties
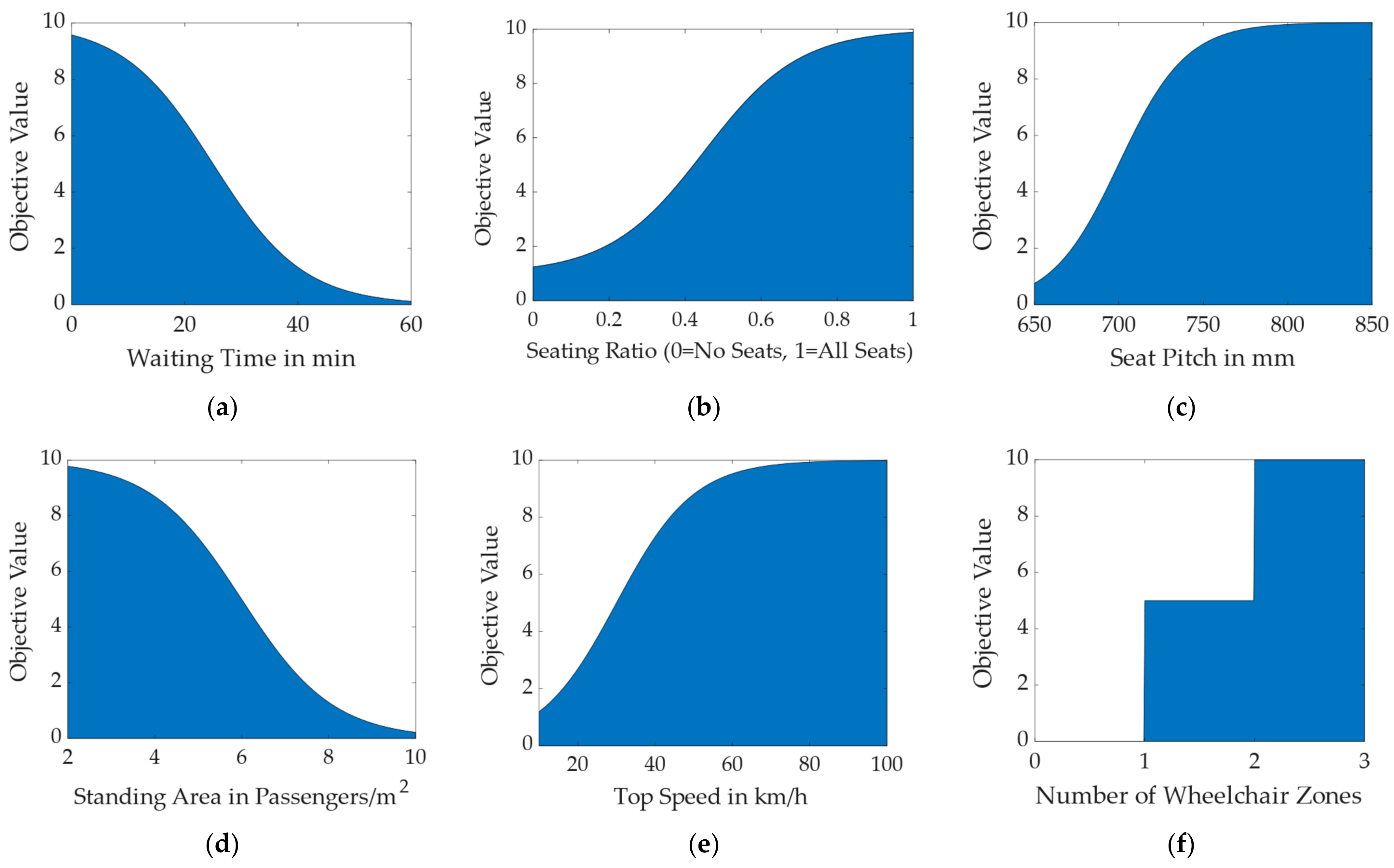
2.2. Formulation of the Objective Function
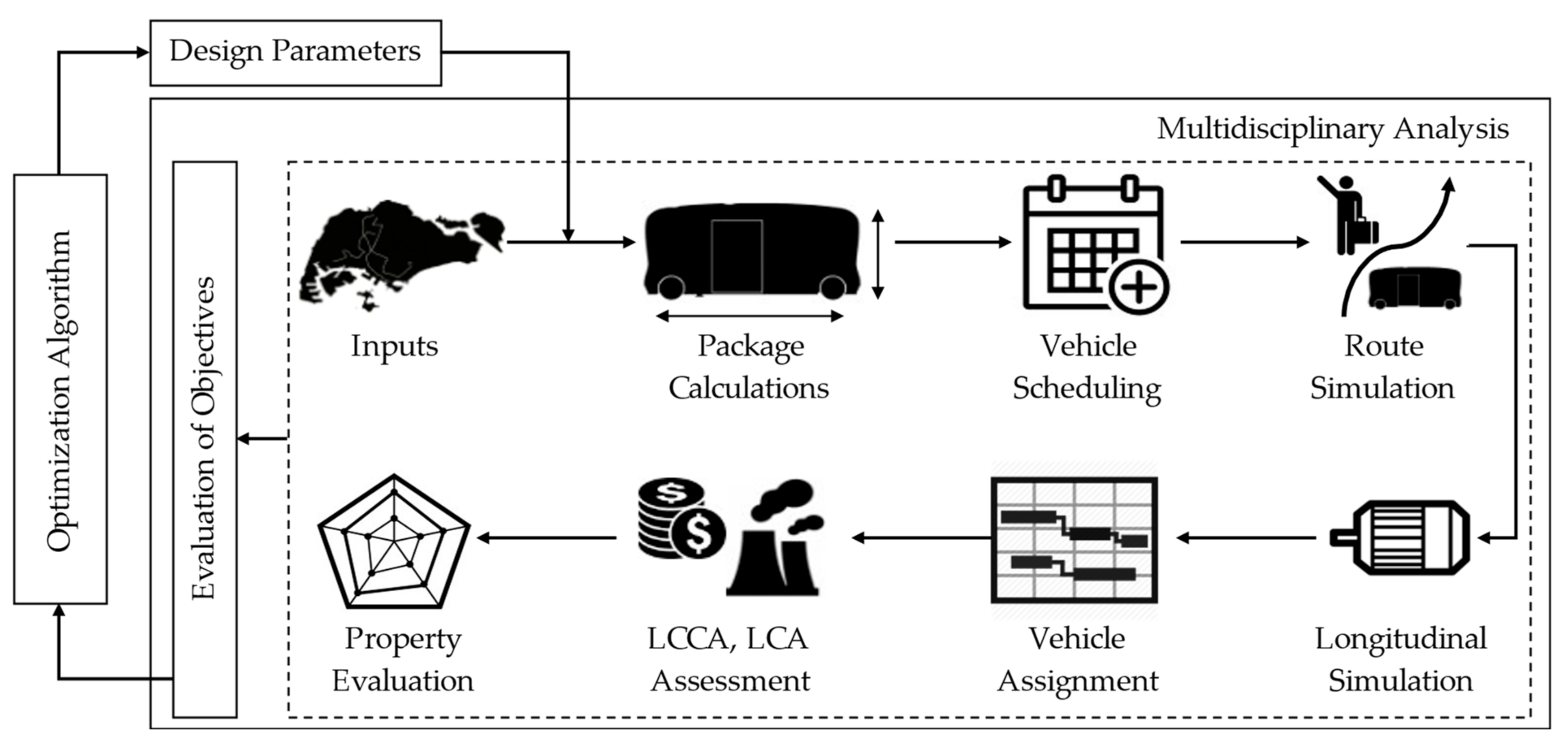
2.3. Implementation of Simulation Models
2.3.1. Inputs
2.3.2. Package Calculation
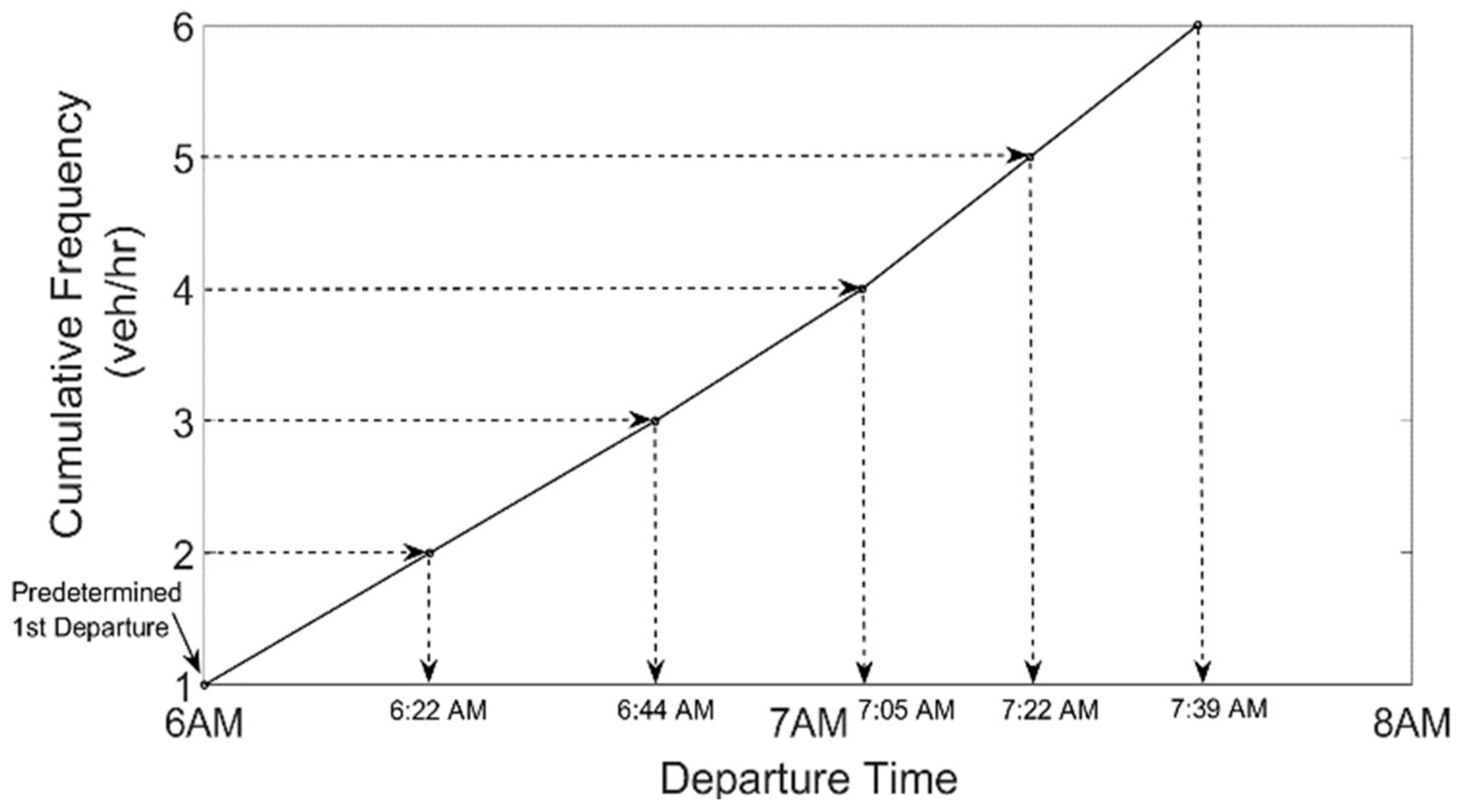
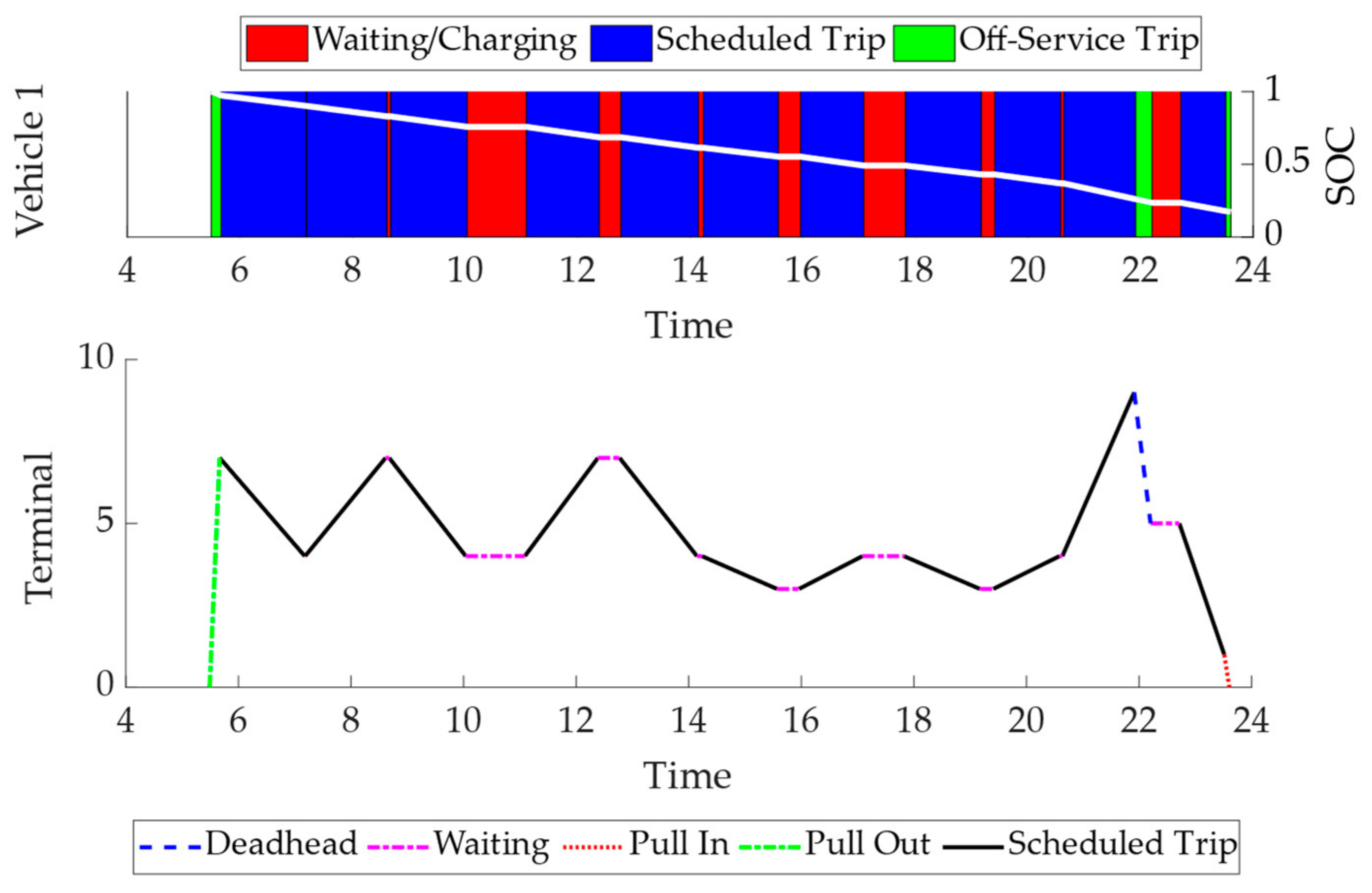
2.3.3. Vehicle Scheduling
2.3.4. Route Simulation
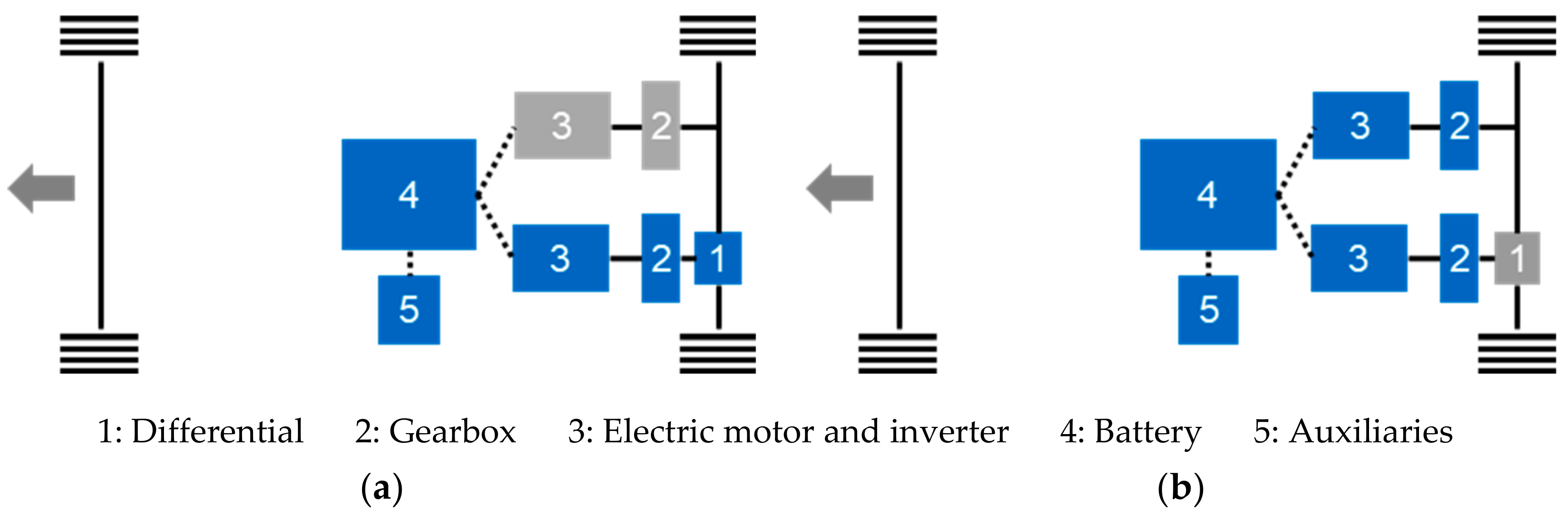
2.3.5. Longitudinal Dynamics Simulation
2.3.6. Vehicle Assignment
2.3.7. Lifecycle Cost Assessment (LCCA) Model
2.3.8. Lifecycle Assessment Model (LCA)
2.3.9. Property Evaluation and Parameter Variation
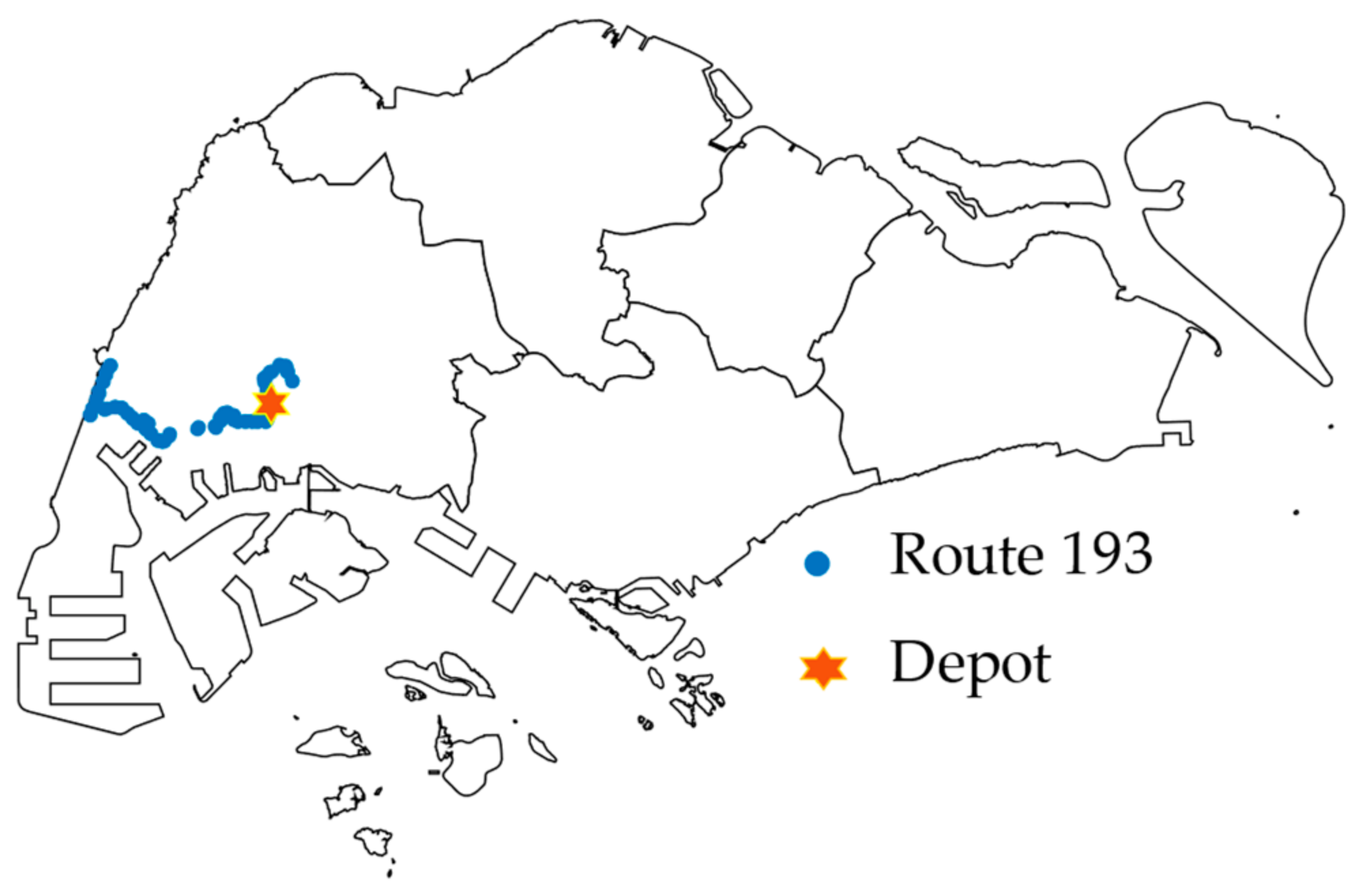
3. Case Study
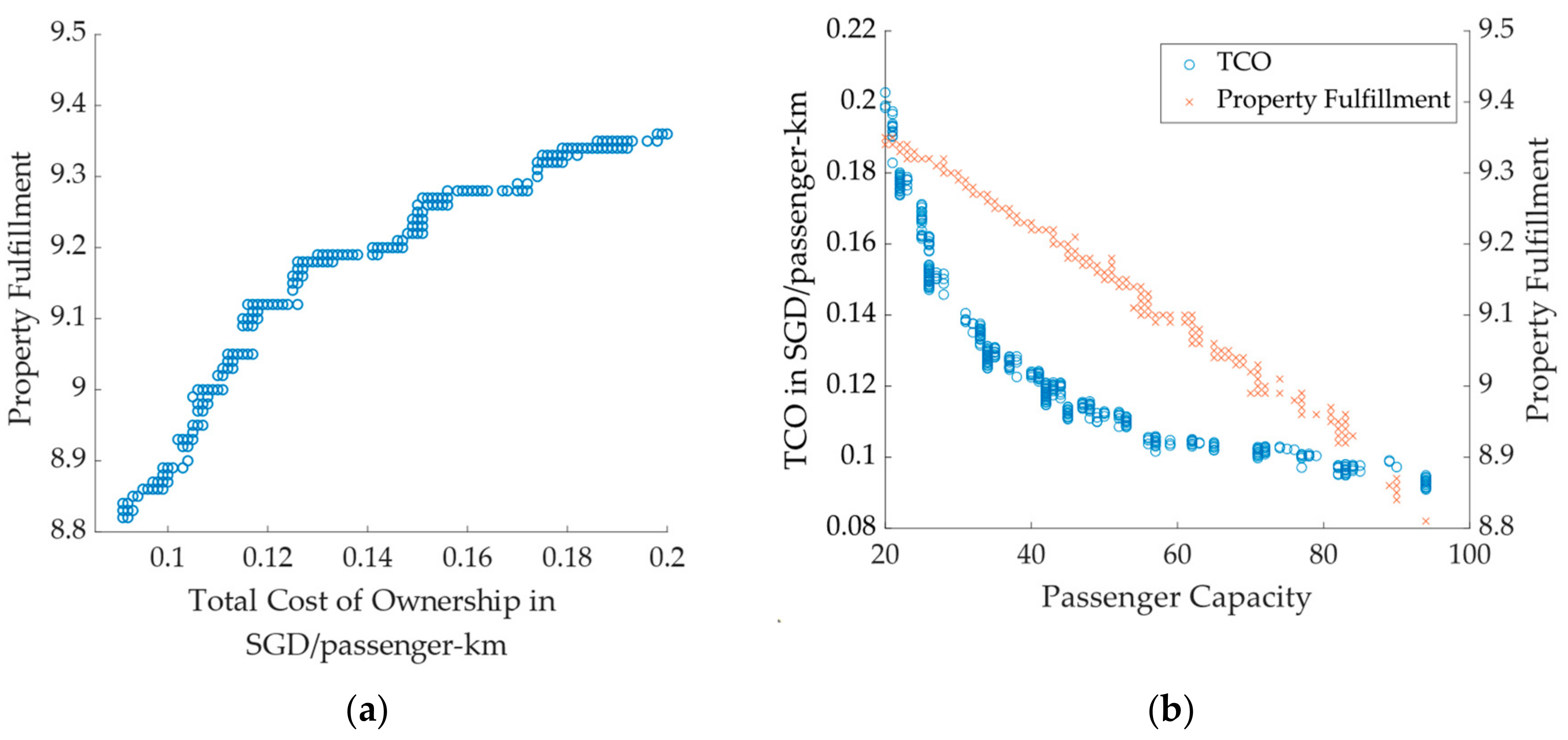
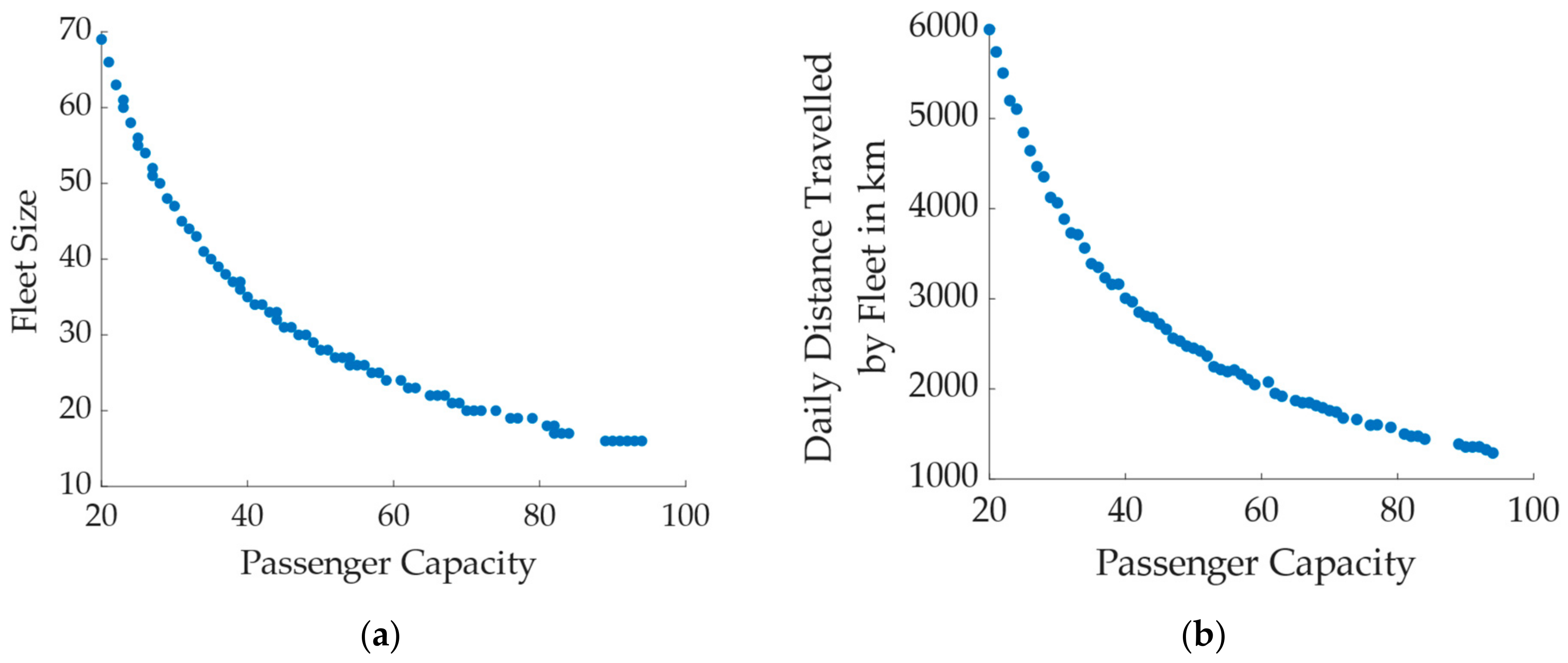
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wadud, Z. Fully automated vehicles: A cost of ownership analysis to inform early adoption. Transp. Res. Part A Policy Pract. 2017, 101, 163–176. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Chang. 2015, 5, 860–863. [Google Scholar] [CrossRef]
- Azad, M.; Hoseinzadeh, N.; Brakewood, C.; Cherry, C.R.; Han, L.D. Fully Autonomous Buses: A Literature Review and Future Research Directions. J. Adv. Transp. 2019, 2019, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Rau, A.; Tian, L.; Jain, M.; Xie, M.; Zhou, Y. Dynamic autonomous road transit (DART) for use-case capacity more than bus. Transp. Res. Procedia 2018, 41, 812–823. [Google Scholar] [CrossRef]
- Project HEAT—Hamburger Hochbahn AG. Available online: https://www.hochbahn.de/hochbahn/hamburg/en/home/projects/expansion_and_projects/project_heat (accessed on 1 December 2020).
- Navya. AUTONOM® SHUTTLE: For more fluid mobility. Available online: https://navya.tech/wp-content/uploads/documents/Brochure_Shuttle_EN.pdf (accessed on 1 December 2020).
- Easy Mile. An Introduction to the EZ10. Available online: https://coloradotransit.com/wp-content/uploads/2018/10/EasyMile-CASTA-Oct-2018.pdf (accessed on 1 December 2020).
- 2getthere. GRT Vehicle: Automated Minibus—2getthere. Available online: https://www.2getthere.eu/technology/vehicle-types/grt-vehicle-automated-minibus/ (accessed on 1 December 2020).
- Kane, M. Electric, Autonomous and Modular Scania NXT Unveiled. Available online: https://insideevs.com/news/354248/electric-autonomous-modular-scania-nxt/ (accessed on 1 December 2020).
- Nicoletti, L.; Romano, A.; König, A.; Schockenhoff, F.; Lienkamp, M. Parametric Modeling of Mass and Volume Effects for Battery Electric Vehicles, with Focus on the Wheel Components. WEVJ 2020, 11, 63. [Google Scholar] [CrossRef]
- Fuchs, S.; Lienkamp, M. Parametric Modelling of Mass and Efficiency of New Vehicle Concepts. Atz Worldw 2013, 115, 60–67. [Google Scholar] [CrossRef]
- Felgenhauer, M.; Nicoletti, L.; Schockenhoff, F.; Angerer, C.; Lienkamp, M. Empiric Weight Model for the Early Phase of Vehicle Architecture Design. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Koenig, A.; Schockenhoff, F.; Koch, A.; Lienkamp, M. Concept Design Optimization of Autonomous and Electric Vehicles. In Proceedings of the 8th International Conference on Power Science and Engineering, (ICPSE 2019), Dublin, Ireland, 2–4 December 2019. [Google Scholar]
- Wiedemann, E.; Meurle, J.; Lienkamp, M. Optimization of Electric Vehicle Concepts Based on Customer-Relevant Characteristics; SAE Technical Paper 2012-01-0815; SAE: Warrendale, PA, USA, 2012. [Google Scholar] [CrossRef]
- Matz, S. Nutzerorientierte Fahrzeugkonzeptoptimierung in Einer multimodalen Verkehrsumgebung. Ph.D. Thesis, Technische Universität München, München, Germany, 2015. [Google Scholar]
- Kuchenbuch, K. Methodik zur Identifikation und zum Entwurf Packageoptimierter Elektrofahrzeuge. Ph.D. Thesis, Technische Universität Braunschweig, Braunschweig, Germany, 2012. [Google Scholar]
- Holjevac, N.; Cheli, F.; Gobbi, M. Multi-objective vehicle optimization: Comparison of combustion engine, hybrid and electric powertrains. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 469–487. [Google Scholar] [CrossRef]
- Lin, X.; Kerler, M.; Birke, K.P.; Lienkamp, M. Optimal Battery Cell Design for Electric Vehicles—A Holistic Method with Consideration of Ageing due to Electrothermal Gradients. In Proceedings of the 8th International Conference on Power Science and Engineering, (ICPSE 2019), Dublin, Ireland, 2–4 December 2019; ISBN 9781728160818. [Google Scholar]
- Angerer, C.; Krapf, S.; Buß, A.; Lienkamp, M. Holistic modeling and optimization of electric vehicle Powertrains considering longitudinal performance, vehicle Dynamics, costs and energy consumption. In Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar]
- Schönknecht, A.; Babik, A.; Rill, V. Electric Powertrain System Design of BEV and HEV Applying a Multi Objective Optimization Methodology. Transp. Res. Procedia 2016, 14, 3611–3620. [Google Scholar] [CrossRef] [Green Version]
- Scholl, M.; Minnerup, K.; Reiter, C.; Bernhardt, B.; Weisbrodt, E.; Newiger, S. Optimization of a Thermal Management System for Battery Electric Vehicles. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Fries, M.; Lehmeyer, M.; Lienkamp, M. Multi-criterion optimization of heavy-duty powertrain design for the evaluation of transport efficiency and costs. In Proceedings of the IEEE 20th International Conference on Intelligent Transportation Systems, Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Ziemann. Zielsystemmanagement für die Produktentstehung von PKW; Books on Demand: Norderstedt, Germany, 2007. [Google Scholar]
- Meurle, J.; Rigel, S.; Muigg, A. Fahrzeugeigenschaften—Erwartungshaltung des Kunden und Technische Umsetzbarkeit; Zenloop: Graz, Austria, 2009. [Google Scholar]
- Weber, J. Automotive Development Processes; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-642-01252-5. [Google Scholar]
- Schockenhoff, F.; König, A.; Koch, A.; Lienkamp, M. Customer-Relevant Properties of Autonomous Vehicle Concepts. Procedia CIRP 2020, 91, 55–60. [Google Scholar] [CrossRef]
- Wiedemann, E. Ableitung von Elektrofahrzeugkonzepten aus Eigenschaftszielen. Ph.D. Thesis, Technische Universität München, München, Germany, 2013. [Google Scholar]
- Moataz, M.; Ryan, G.; Mark, F.; Pavlos, K. Electric buses: A review of alternative powertrains. Renew. Sustain. Energy Rev. 2016, 62, 673–684. [Google Scholar] [CrossRef]
- Lajunen, A. Energy consumption and cost-benefit analysis of hybrid and electric city buses. Transp. Res. Part C Emerg. Technol. 2014, 38, 1–15. [Google Scholar] [CrossRef]
- Harris, A.; Soban, D.; Smyth, B.M.; Best, R. A probabilistic fleet analysis for energy consumption, life cycle cost and greenhouse gas emissions modelling of bus technologies. Appl. Energy 2020, 261, 114422. [Google Scholar] [CrossRef]
- Lajunen, A. Lifecycle costs and charging requirements of electric buses with different charging methods. J. Clean. Prod. 2018, 172, 56–67. [Google Scholar] [CrossRef]
- Kunith, A.; Mendelevitch, R.; Goehlich, D. Electrification of a city bus network—An optimization model for cost-effective placing of charging infrastructure and battery sizing of fast-charging electric bus systems. Int. J. Sustain. Transp. 2017, 11, 707–720. [Google Scholar] [CrossRef] [Green Version]
- Teichert, O.; Chang, F.; Ongel, A.; Lienkamp, M. Joint Optimization of Vehicle Battery Pack Capacity and Charging Infrastructure for Electrified Public Bus Systems. IEEE Trans. Transp. Electrif. 2019, 5, 672–682. [Google Scholar] [CrossRef]
- van Kooten Niekerk, M.E.; van den Akker, J.M.; Hoogeveen, J.A. Scheduling electric vehicles. Public Transp. 2017, 9, 155–176. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Xu, J.; Barclay, N. Optimal recharging scheduling for urban electric buses: A case study in Davis. Transp. Res. Part E Logist. Transp. Rev. 2017, 100, 115–132. [Google Scholar] [CrossRef]
- Nicoletti, L.; Bronner, M.; Danquah, B.; Koch, A.; Konig, A.; Krapf, S.; Pathak, A.; Schockenhoff, F.; Sethuraman, G.; Wolff, S.; et al. Review of Trends and Potentials in the Vehicle Concept Development Process. In Proceedings of the 2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 September 2020; pp. 1–15. [Google Scholar] [CrossRef]
- Scheuermann, S. Development of a Customer-Centric Approach to Derive Autonomous Electric Vehicle Concepts for Public Transportation in Singapore. Master’s Thesis, Technical University of Munich, Munich, Germany, 2020. [Google Scholar]
- Aigner, J. Zur zuverlässigen Beurteilung von Fahrzeugen. ATZ Automobiltechnische Zeitschrift 1982, 84, 447–450. [Google Scholar]
- Sethuraman, G.; Schwarz, M.; Maxl, S.; Ongel, A.; Lienkamp, M.; Ng, H.W.; Raksincharoensak, P. Development of an Overall Vehicle Sizing and Packaging Tool for Autonomous Electric Buses in the Early Concept Phase. SAE Int. J. Commer. Veh. 2020, 13, 23–42. [Google Scholar] [CrossRef]
- Nicoletti, L.; Mayer, S.; Brönner, M.; Schockenhoff, F.; Lienkamp, M. Design Parameters for the Early Development Phase of Battery Electric Vehicles. WEVJ 2020, 11, 47. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Pesce, T. Ein Werkzeug zur Spezifikation von Effizienten Antriebstopologien für Elektrofahrzeuge. Ph.D. Thesis, Technische Universität München, München, Germany, 2014. [Google Scholar]
- Seeger, F. Energetische Modellierung Verschiedener Systeme zur Momentenverteilung für ein Adaptives Antriebsstrangmodell. Semester Thesis, Technische Universität München, München, Germany, 2017. [Google Scholar]
- Friedrichshafen, Z.F. Axle & Transmission Systems for Buses. Available online: https://www.zf.com/master/media/corporate/m_zf_com/company/download_center/products/trucks/2020_3/TU_Product_Overview_202012_DE_EN_LowRes.pdf (accessed on 15 December 2020).
- Sethuraman, G.; Tran, P.R.; Ongel, A.; Lienkamp, M.; Raksincharoensak, P. Development of a parametric packaging and sizing tool for autonomous electric bus system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020. [Google Scholar] [CrossRef]
- Ceder, A.; Hassold, S.; Dano, B. Approaching even-load and even-headway transit timetables using different bus sizes. Public Transp. 2013, 5, 193–217. [Google Scholar] [CrossRef]
- Sun, L.; Tirachini, A.; Axhausen, K.W.; Erath, A.; Lee, D.-H. Models of bus boarding and alighting dynamics. Transp. Res. Part A Policy Pract. 2014, 69, 447–460. [Google Scholar] [CrossRef] [Green Version]
- Pathak, A.; Sethuraman, G.; Krapf, S.; Ongel, A.; Lienkamp, M. Exploration of Optimal Powertrain Design Using Realistic Load Profiles. World Electr. Veh. J. 2019, 10, 56. [Google Scholar] [CrossRef] [Green Version]
- Ongel, A.; Loewer, E.; Roemer, F.; Sethuraman, G.; Chang, F.; Lienkamp, M. Economic Assessment of Autonomous Electric Microtransit Vehicles. Sustainability 2019, 11, 648. [Google Scholar] [CrossRef] [Green Version]
- Fries, M.; Kerler, M.; Rohr, S.; Sinning, M.; Schickram, S.; Lienkamp, M.; Kochhan, R.; Fuchs, S.; Reuter, B.; Burda, P.; et al. An Overview of Costs for Vehicle Components, Fuels, Greenhouse Gas Emissions and Total Cost of Ownership—Update 2017. Res. Gate 2017. [Google Scholar] [CrossRef]
- Fuchs, S. Verfahren zur Parameterbasierten Gewichtsabschätzung neuer Fahrzeugkonzepte. Ph.D. Thesis, Technische Universität München, München, Germany, 2014. [Google Scholar]
- Energy Market Authority. Singapore Energy Statistics—Energy Prices. Available online: https://www.ema.gov.sg/singapore-energy-statistics/Ch05/index5 (accessed on 16 December 2020).
- Sethuraman, G. Vehicle Component Configuration Design and Packaging in Virtual Environment for Autonomous Electric Buses. Ph.D. Thesis, Tokyo University of Agriculture and Technology, Tokyo, Japan, 2020. [Google Scholar]
- Umberto LCA+. Umberto LCA+. Available online: https://www.ifu.com/en/umberto/lca-software/ (accessed on 8 May 2020).
- Ecoinvent. Ecoinvent 3.5. Available online: https://www.ecoinvent.org/database/olderversions/ecoinvent-35/ecoinvent-35.html (accessed on 3 February 2019).
- Pathak, A.; Sethuraman, G.; Ongel, A.; Lienkamp, M. Impacts of electrification & automation of public bus transportation on sustainability—A case study in Singapore. Forsch. Ing. 2020. [Google Scholar] [CrossRef]
- EMA Supply. Energy Market Authority|Energy Supply. Available online: https://www.ema.gov.sg/cmsmedia/Publications_and_Statistics/Publications/ses/2018/energy-supply/index.html (accessed on 7 May 2020).
- Kelly, S.; Apelian, D. Automotive Aluminum Recycling at End of Life: A Grave-to-Gate Analysis. Available online: http://www.drivealuminum.org/wp-content/uploads/2016/06/Final-Report-Automotive-Aluminum-Recycling-at-End-of-Life-A-Grave-to-Gate-Analysis.pdf (accessed on 16 December 2020).
- LithoRec II. Recycling of EV-Lithium-Ion-Batteries. Available online: http://www.lithorec2.de/index.php/en/ (accessed on 1 October 2019).
- McGlothlin, S. Copper Recycling Process Technology in End of Life Vehicle (ELV) Shredder Plants. Available online: https://www.metalbulletin.com/events/download.ashx/document/speaker/6539/a0ID000000X0jUWMAZ/Presentation (accessed on 1 October 2019).
- WorldAutoSteel. Recycling. Available online: https://www.worldautosteel.org/life-cyclethinking/recycling/ (accessed on 2 July 2019).
- Lai, J.; Yu, L.; Song, G.; Guo, P.; Chen, X. Development of City-Specific Driving Cycles for Transit Buses Based on VSP Distributions: Case of Beijing. J. Transp. Eng. 2013, 139, 749–757. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Attributes |
|---|---|
| Service Performance | Waiting time Travel time Seat availability |
| Accessibility | Entry height Wheelchair zones Number of doors |
| Comfort | Seat width Legroom Standing space Headroom Thermal comfort Ride comfort |
| Functionality | Luggage storage Power outlets Bicycle storage |
| Information | Human-machine interfaces |
| Safety | Handrails and handles Seatbelts Security/surveillance cameras |
| Longitudinal Dynamics | Top speed Acceleration Gradeability |
| Environmental Performance | Lifecycle greenhouse gas emissions |
| Costs | Total Cost of Ownership |
| Vehicle Parameters | Lower Bound | Upper Bound | Type |
|---|---|---|---|
| Vehicle Height | 2100 mm | 3000 mm | Continuous |
| Vehicle Length | 5000 mm | 13000 mm | Continuous |
| Vehicle Width | 2500 mm | 2600 mm | Continuous |
| Interior Layout | Layout 1 | Layout 2 | Categorical |
| Wheelbase | 2500 mm | 9000 mm | Continuous |
| Seat Pitch | 650 mm | 850 mm | Continuous |
| Seat Width | 400 mm | 550 mm | Continuous |
| Standing Space | 2 Passengers/m2 | 8 Passengers/m2 | Continuous |
| Powertrain Topology | Topology 1 | Topology 2 | Categorical |
| Total Power | 40 kW | 400 kW | Continuous |
| Gear Ratio | 1 | 30 | Continuous |
| Battery Capacity | 30 kWh | 350 kWh | Continuous |
| Wheelchair Zones | 0 | 2 | Discrete |
| Number of Doors | 1 | 2 | Discrete |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pathak, A.; Scheuermann, S.; Ongel, A.; Lienkamp, M. Conceptual Design Optimization of Autonomous Electric Buses in Public Transportation. World Electr. Veh. J. 2021, 12, 30. https://doi.org/10.3390/wevj12010030
Pathak A, Scheuermann S, Ongel A, Lienkamp M. Conceptual Design Optimization of Autonomous Electric Buses in Public Transportation. World Electric Vehicle Journal. 2021; 12(1):30. https://doi.org/10.3390/wevj12010030
Chicago/Turabian StylePathak, Aditya, Silvan Scheuermann, Aybike Ongel, and Markus Lienkamp. 2021. "Conceptual Design Optimization of Autonomous Electric Buses in Public Transportation" World Electric Vehicle Journal 12, no. 1: 30. https://doi.org/10.3390/wevj12010030
APA StylePathak, A., Scheuermann, S., Ongel, A., & Lienkamp, M. (2021). Conceptual Design Optimization of Autonomous Electric Buses in Public Transportation. World Electric Vehicle Journal, 12(1), 30. https://doi.org/10.3390/wevj12010030