
Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles

 , , and
, , and 
Abstract
:1. Introduction
- Able to provide high starting torque;
- Higher torque and output power per unit volume due to the usage of permanent magnets;
- High magnetic flux density in the air gap allows for better dynamic performance of the motor, which is essential when using EVs;
- High efficiency since there are no energy losses in the field due to usage of permanent magnets;
- Flux weakening technique can be used to increase the maximum speed that can be attained in the constant power region;
- Motor is compact, and its construction is simple.
- Uses a model for future prediction of control variables, thereby making it fast;
- Good transient response due to the reduced number of controllers;
- Incorporates a cost function which can have additional constraints such as switching frequency reduction, torque ripple minimization, etc. [2].
Technology Gap and Contribution of the Proposed Work
2. FOC Theory and Modeling
FOC Principle
- Conversion of stator current from three-phase abc frame to two-phase stationary dq frame (Forward Park Transform).
- Using PI controllers to control the dq0 currents by generating gating signals for the PWM Inverter.
- Application of inverter voltage to the PMSM to obtain the required torque and speed.
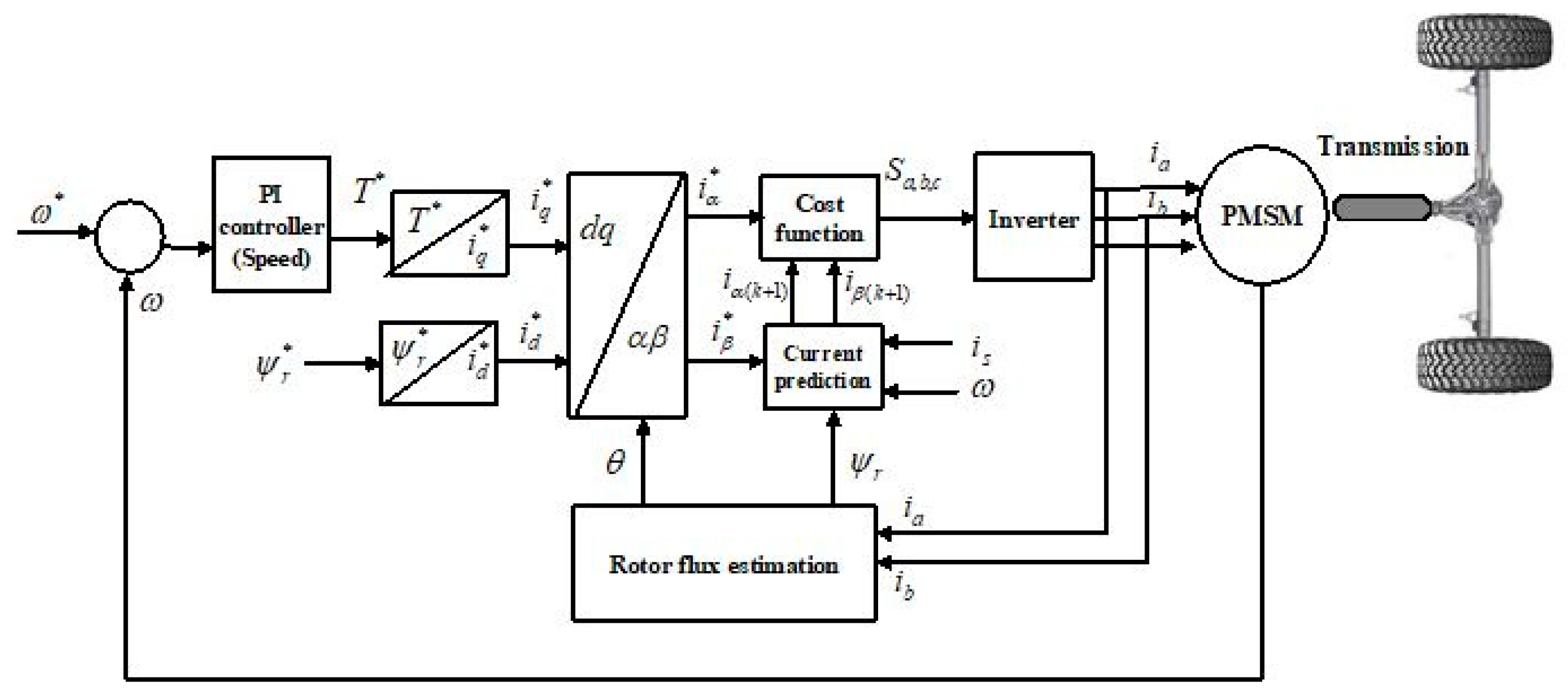
3. FCS-MPC Theory and Modeling
- Implementing a mathematical model for the system in consideration, which is used to predict the future values of the control variable;
- Implementing a cost function to minimize error in the control variables.
4. Simulation Modeling and Demonstration
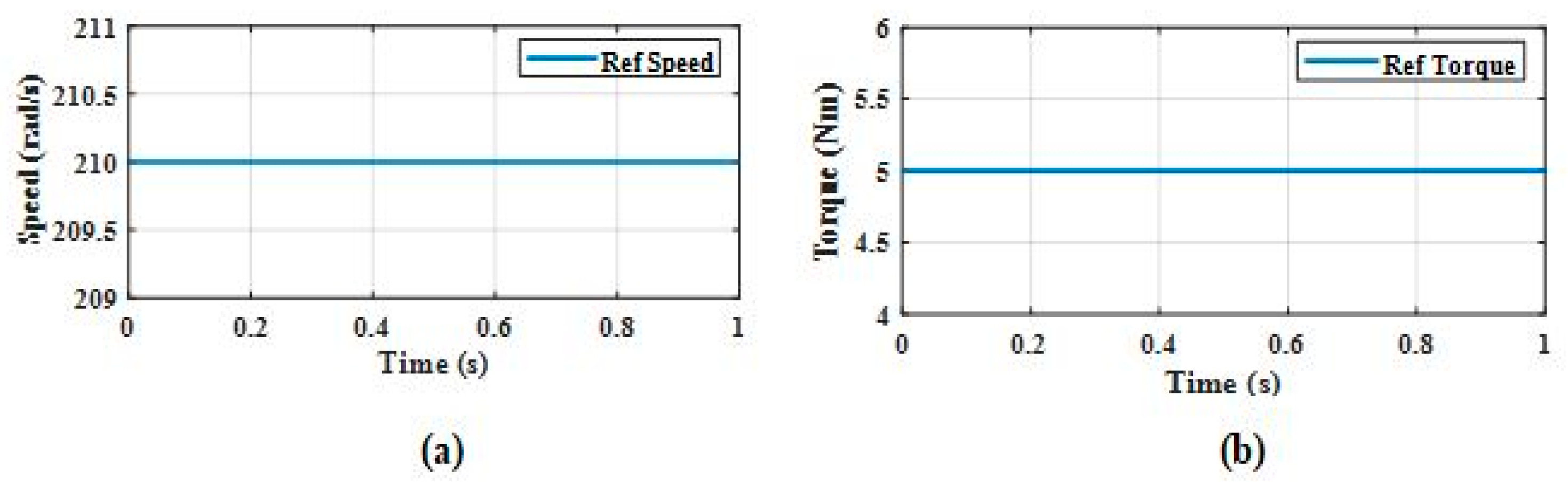
- Best-Case Condition: Constant Speed and Constant Torque.
- Worst-Case Condition: Variable Speed and Variable Torque.
- Case 1: Constant Speed and Constant Torque
- Case 2: Variable Speed and Variable Torque
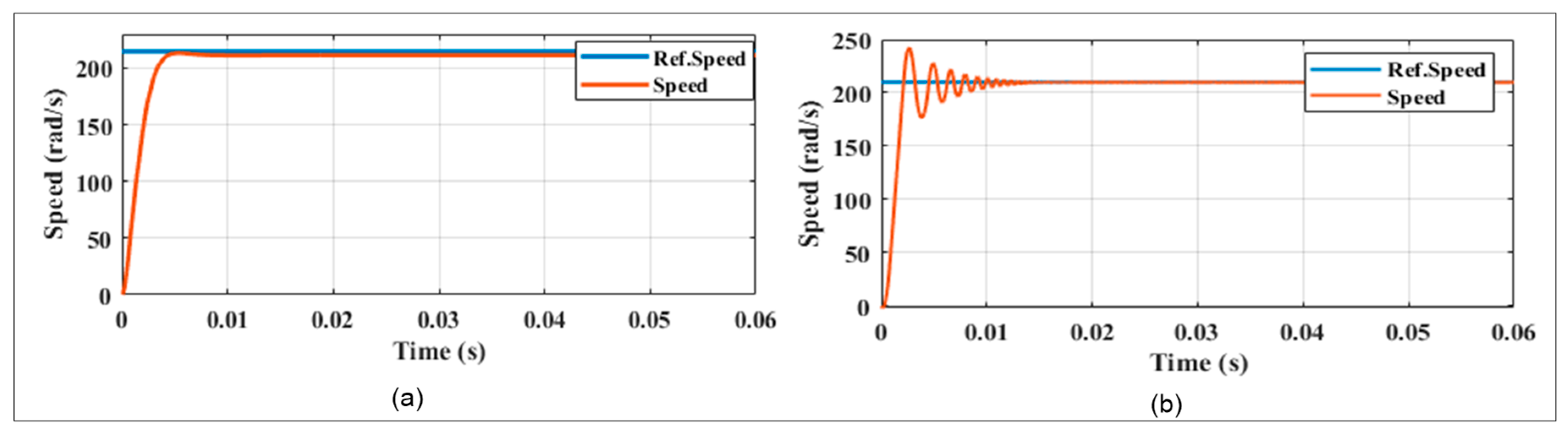
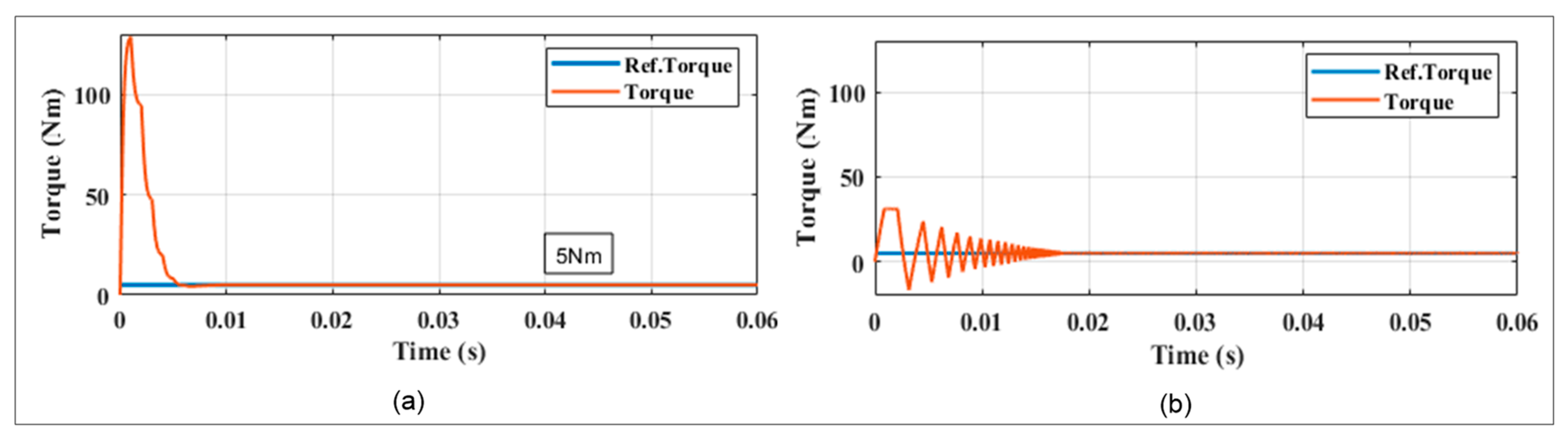
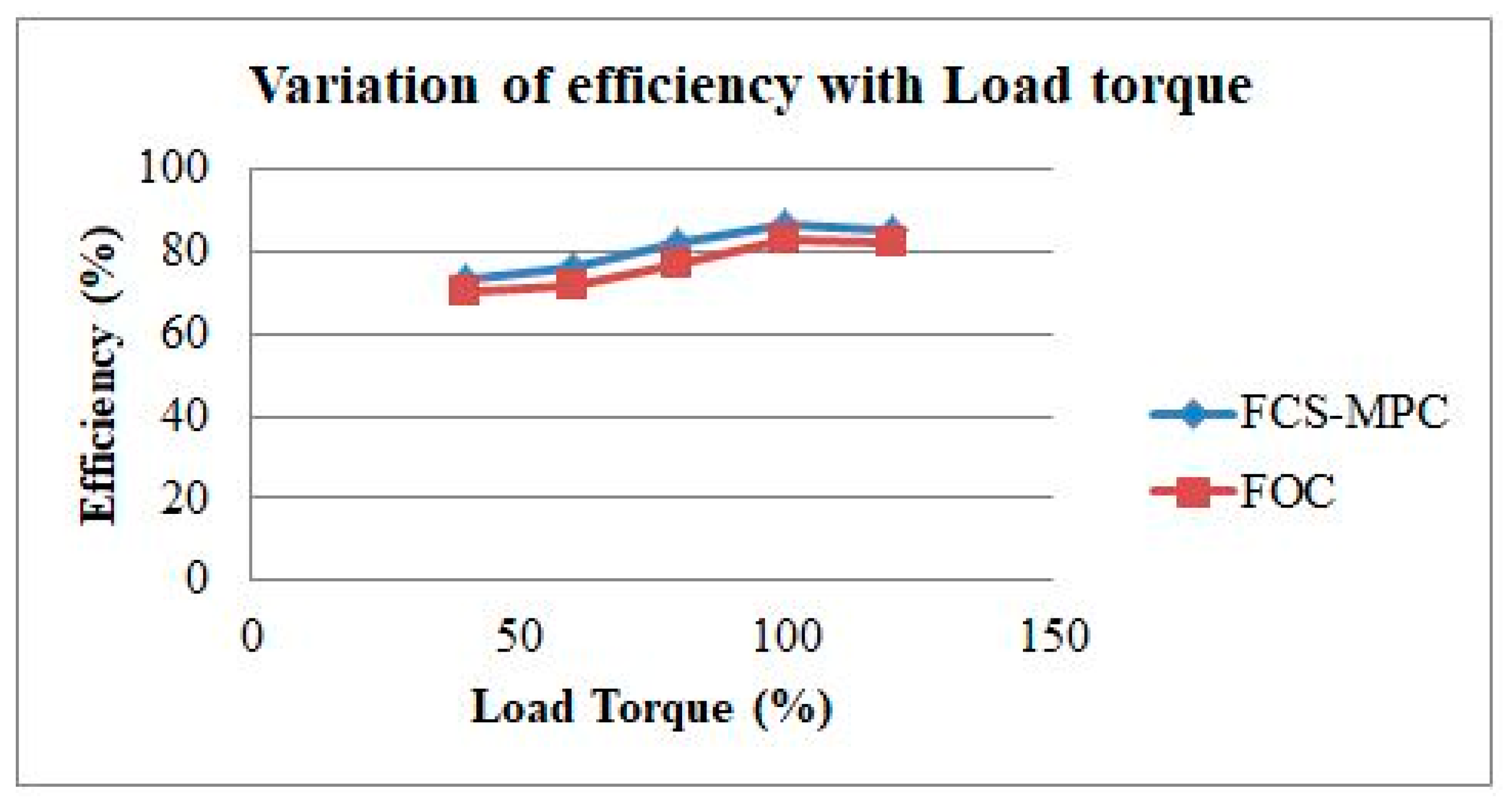
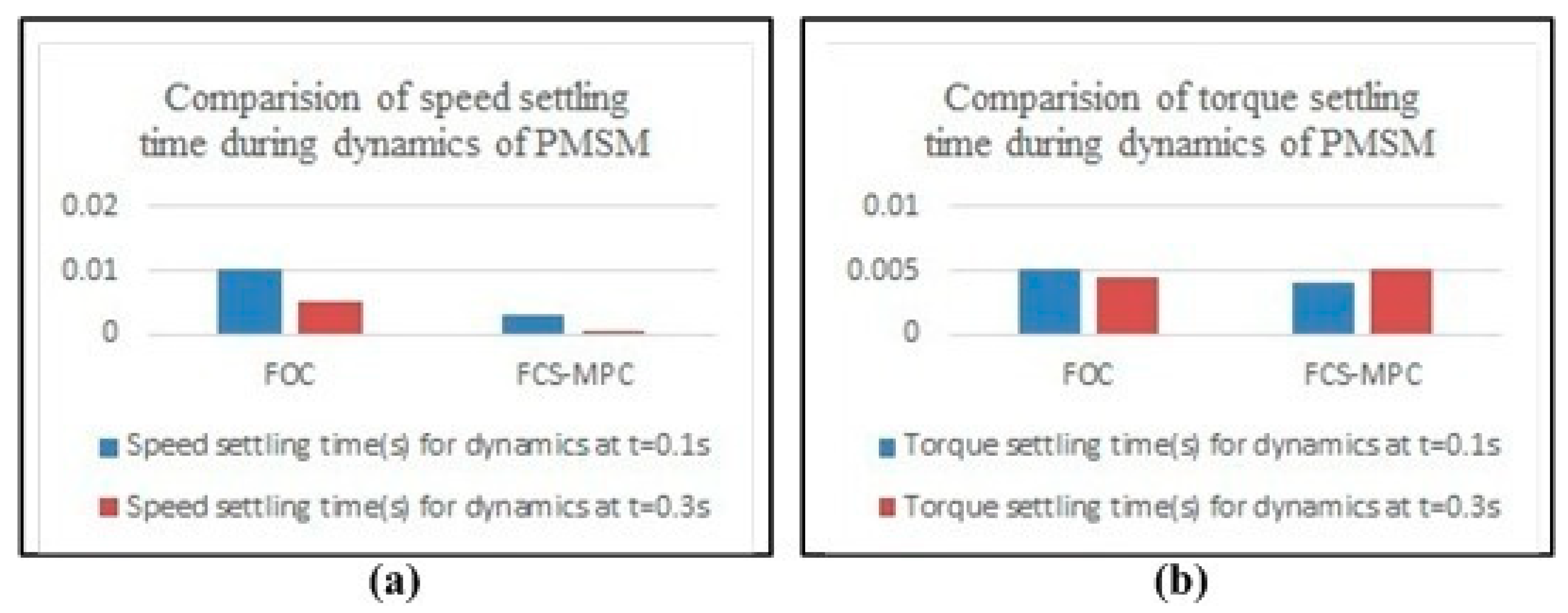
5. Results and Discussion
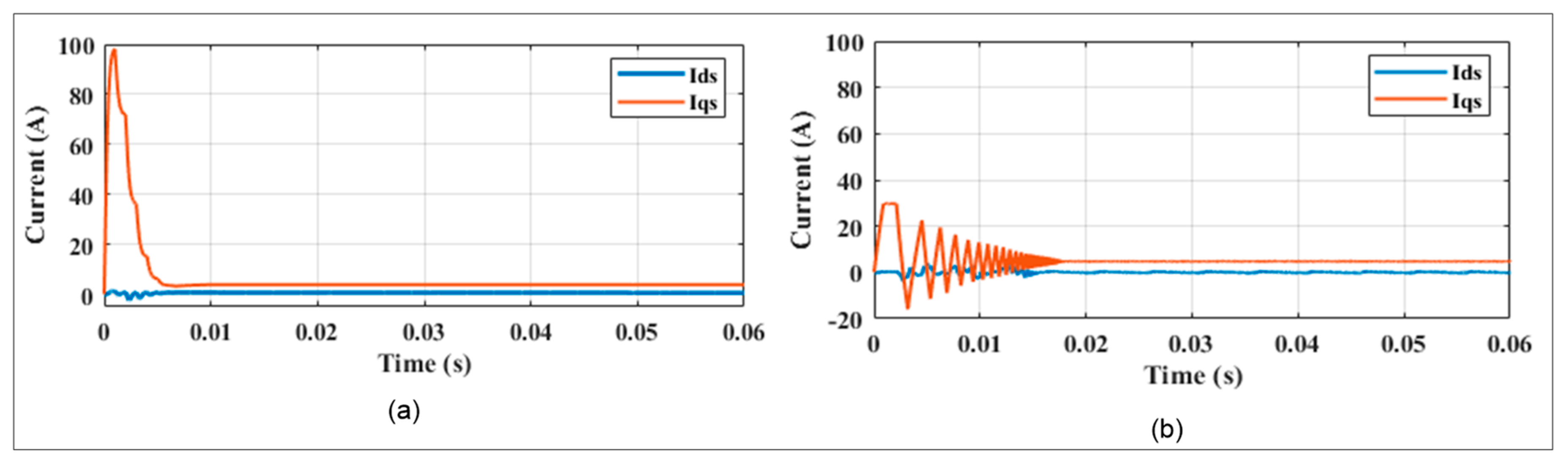
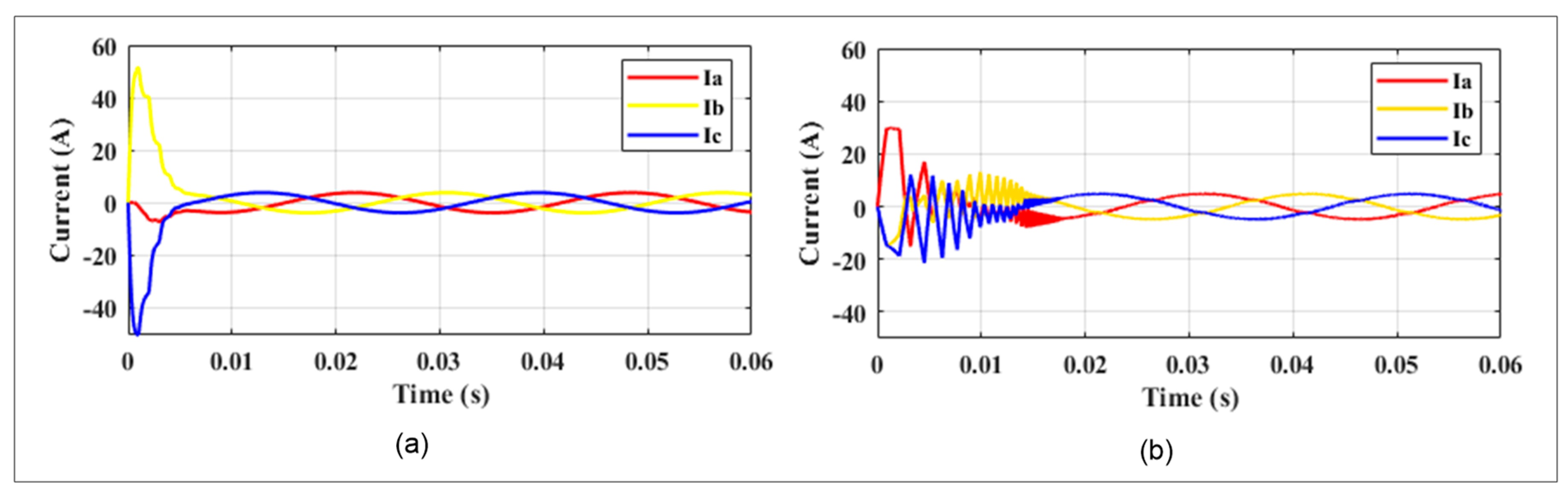
5.1. Results for Case 1
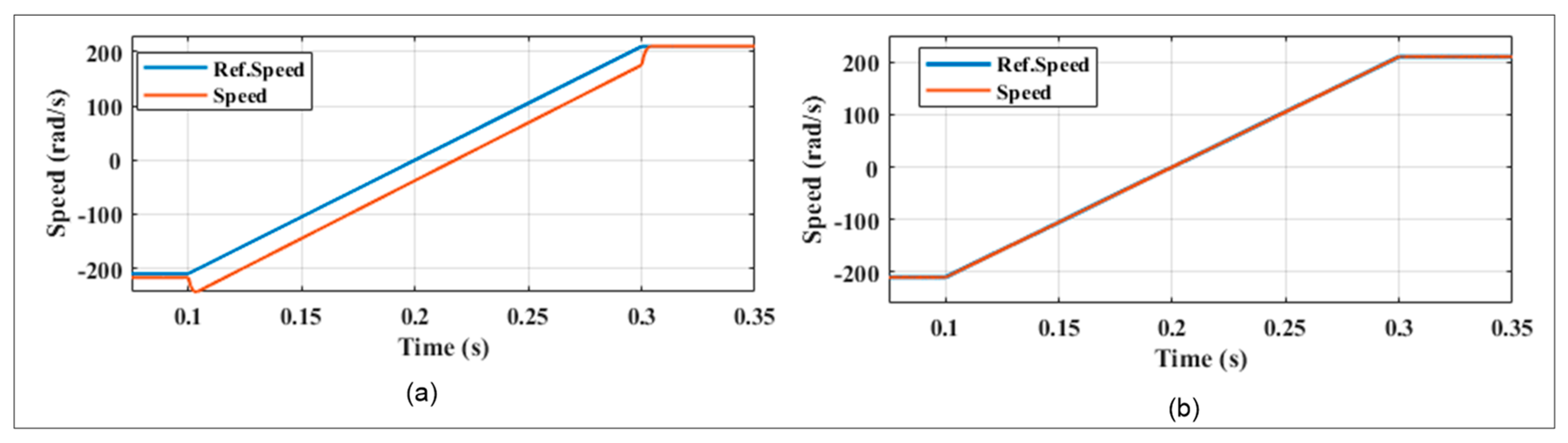
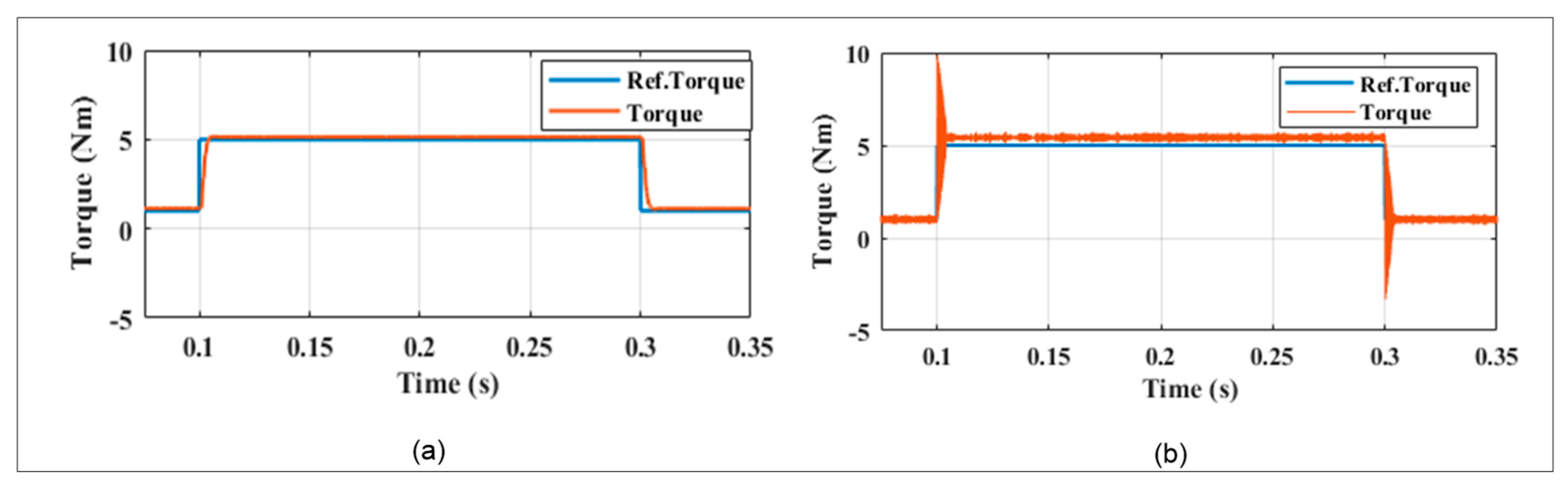
5.2. Results for Case 2
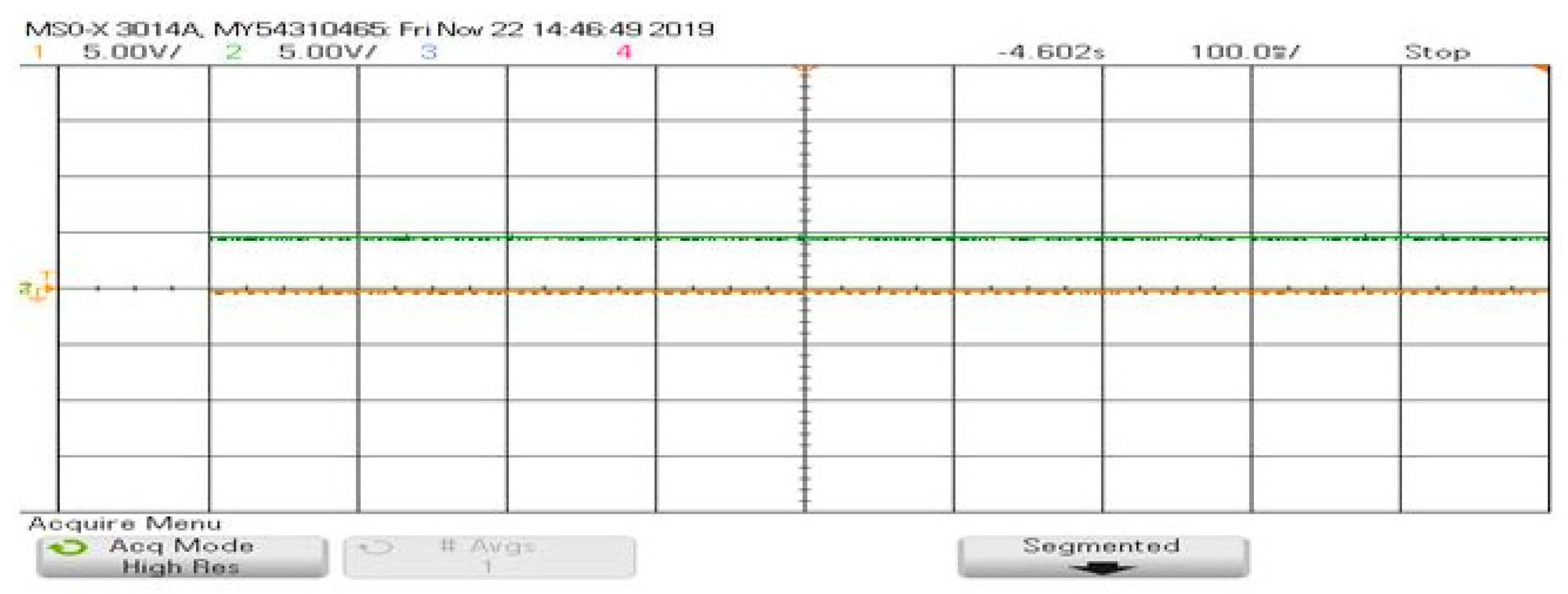
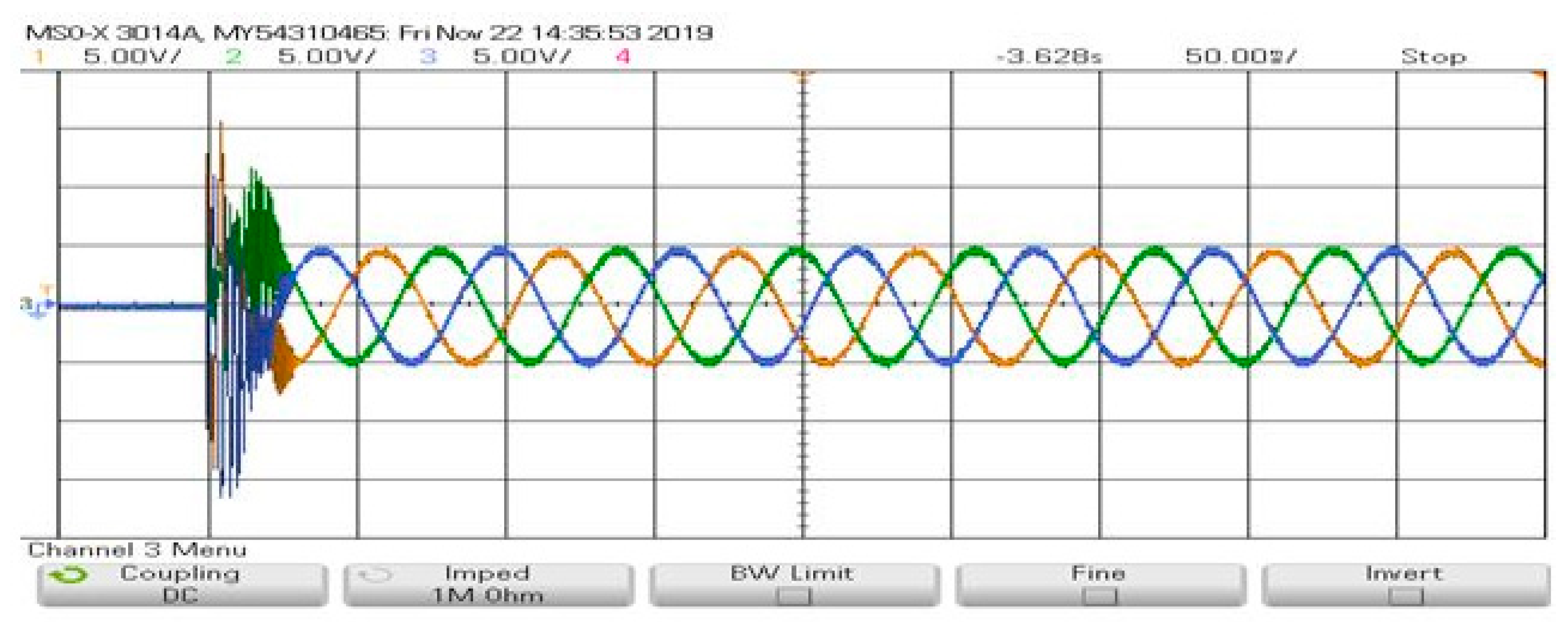
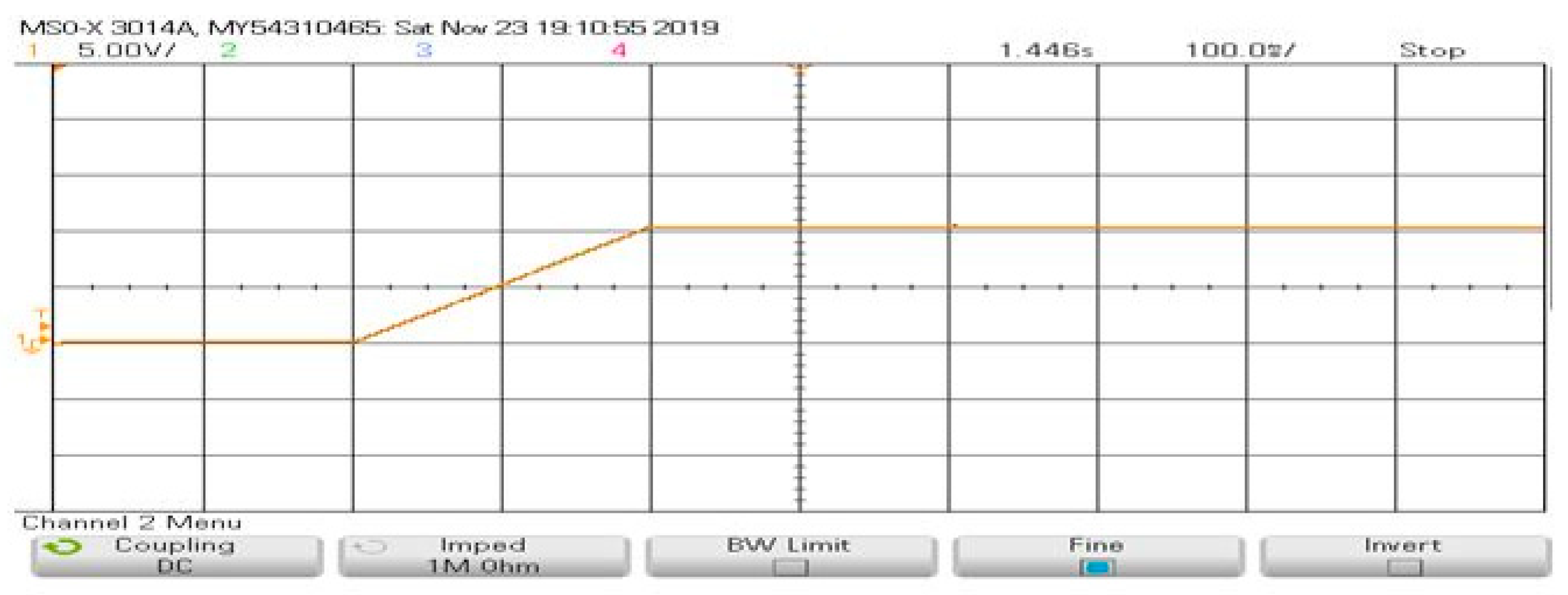
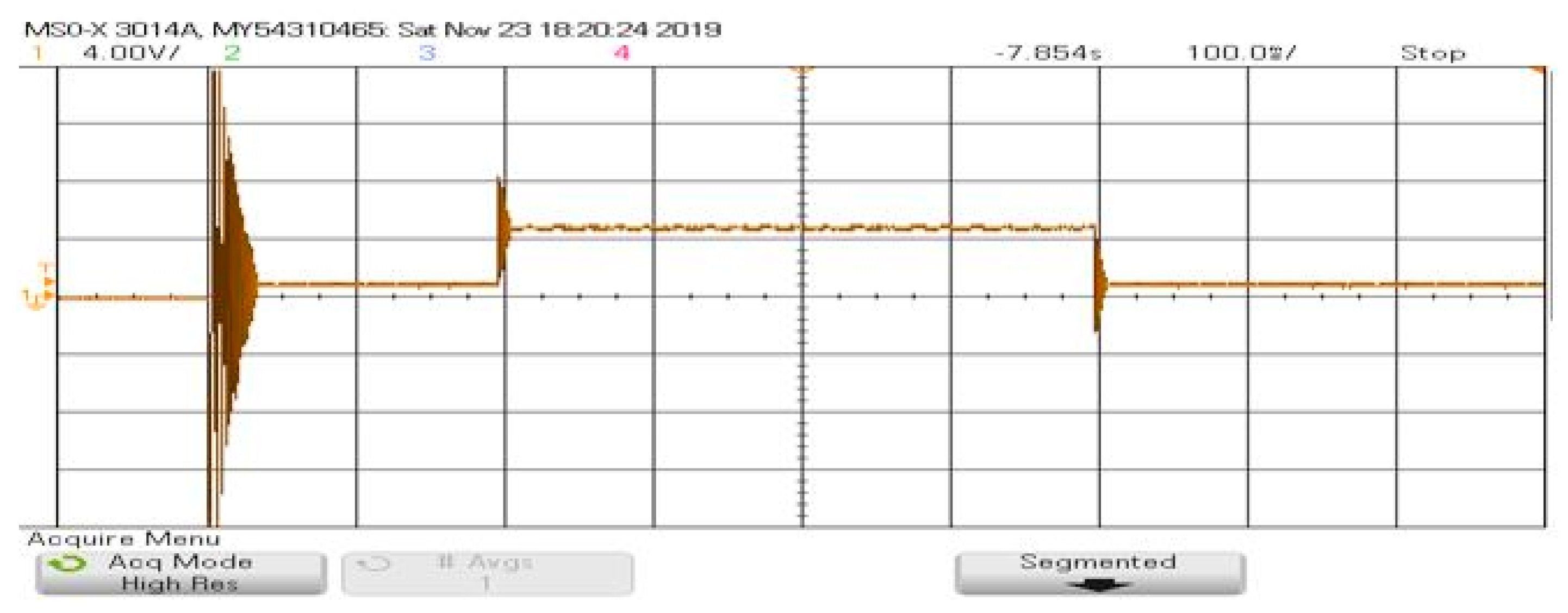
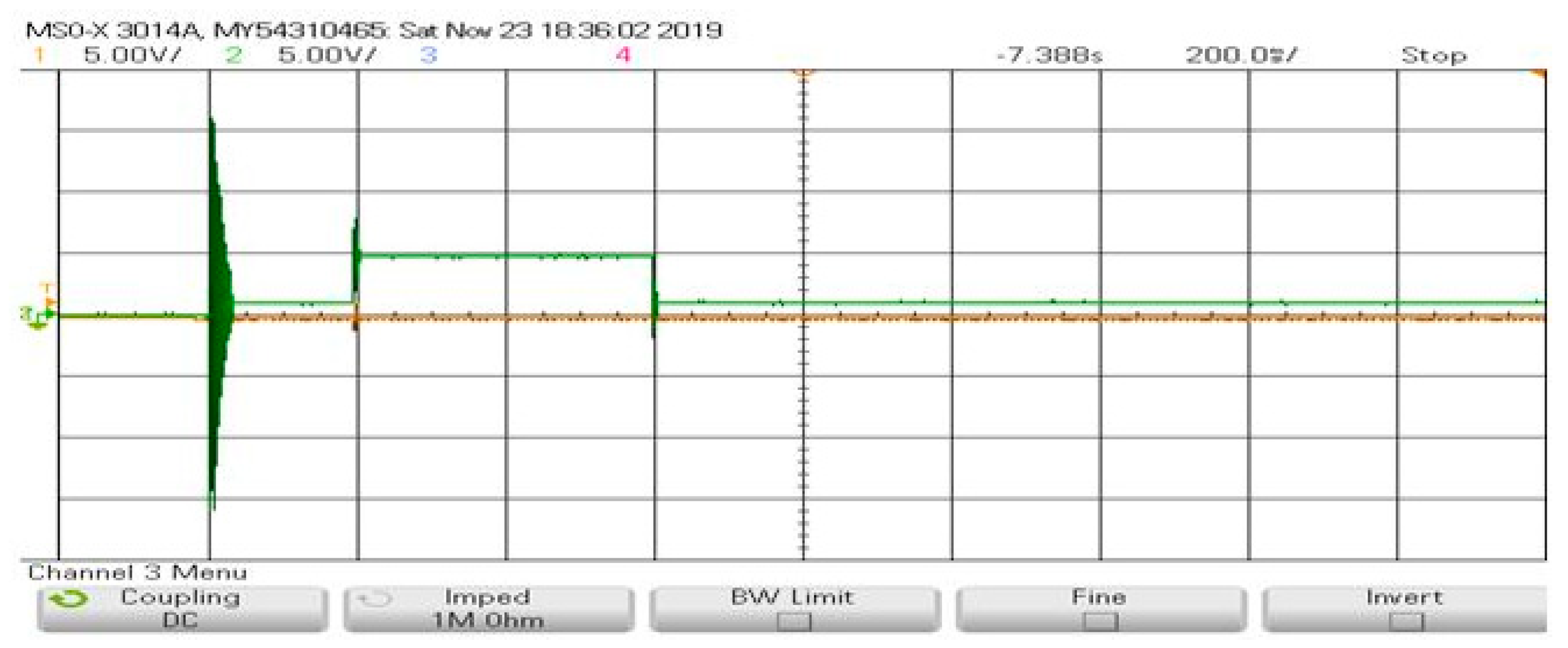
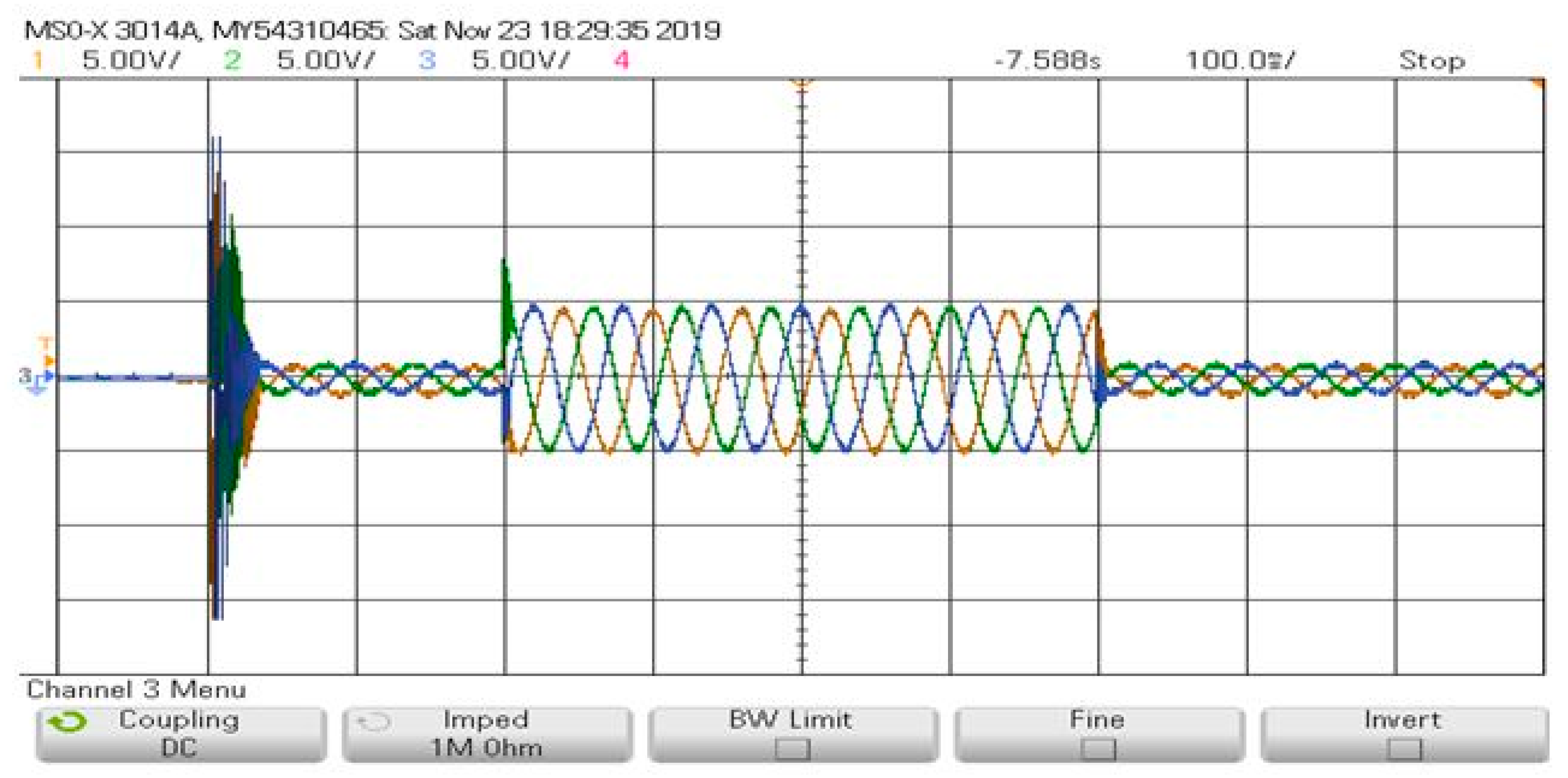
5.3. Real-Time Operating Results Using OPAL-RT
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Younesi, A.; Tohidi, S.; Feyzi, M.R.; Baradarannia, M. An improved nonlinear model predictive direct speed control of permanent magnet synchronous motors. Int. Trans. Energy Syst. 2018, 28, e2535. [Google Scholar] [CrossRef]
- Sultana, W.R.; Sahoo, S.K.; Saikiran, K.S.; Reddy, G.R.; Reddy, P.H. A computationally efficient finite state model predictive control for cascaded multilevel inverter. Ain Shams Eng. J. 2016, 7, 567–578. [Google Scholar] [CrossRef] [Green Version]
- Amezquita-Brooks, L.; Liceaga-Castro, J.; Liceaga-Castro, E. Speed and position controllers using indirect field-oriented control: A classical control approach. IEEE Trans. Ind. Electron. 2013, 61, 1928–1943. [Google Scholar] [CrossRef]
- Kiran, K.; Das, S.; Singh, D. Model predictive field oriented speed control of brushless doubly-fed reluctance motor drive. In Proceedings of the International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 18–20 January 2018; pp. 1–6. [Google Scholar]
- Liu, T.; Chen, G.; Li, S. Application of Vector Control Technology for PMSM Used in Electric Vehicles. Open Autom. Control Syst. J. 2014, 6, 1334–1341. [Google Scholar] [CrossRef]
- Li, N.; Ming, Y.; Xianguo, G.; Dianguo, X. A comparative study of model predictive current control and FOC for PMSM. In Proceedings of the 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22 October 2014; pp. 3143–3147. [Google Scholar]
- Niu, F.; Wang, B.; Babel, A.S.; Li, K.; Strangas, E.G. Comparative evaluation of direct torque control strategies for permanent magnet synchronous machines. IEEE Trans. Power Electron. 2015, 31, 1408–1424. [Google Scholar] [CrossRef]
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the performances and parameters of interior PMSM used for electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, J. A robust adaptive control for permanent magnet synchronous motor subject to parameter uncertainties and input saturations. J. Electr. Eng. Technol. 2018, 13, 2125–2133. [Google Scholar]
- Zhang, Y.; Xia, B.; Yang, H. Performance evaluation of an improved model predictive control with field oriented control as a benchmark. IET Electr. Power Appl. 2017, 11, 677–687. [Google Scholar] [CrossRef]
- Adamopoulos, N.K.; Karamountzou, F.A.; Sarigiannidis, A.G.; Kladas, A.G. Comparison of field oriented versus model predictive torque control techniques for monitoring interior PM traction motor over wide speed range. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017. [Google Scholar]
- Yang, J.; Mao, Y.; Chen, Y. Sensorless control of permanent magnet synchronous motors with compensation for parameter uncertainty. J. Electr. Eng. Technol. 2017, 12, 1166–1176. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Hameyer, K. Torque ripple minimization for direct torque control of PMSM with modified FCSMPC. IEEE Trans. Ind. Appl. 2016, 52, 4855–4864. [Google Scholar] [CrossRef]
- Ben Salem, F.; Feki, M. An Improved DTC Induction Motor for Electric Vehicle Propulsion: An Intention to Provide a Comfortable Ride. Solving Transp. Probl. Towards Green Logist. 2019, 16, 185–201. [Google Scholar]
- Justo, J.J.; Mwasilu, F.; Kim, E.K.; Kim, J.; Choi, H.H.; Jung, J.W. Fuzzy model predictive direct torque control of IPMSMs for electric vehicle applications. IEEE/ASME Trans. Mechatron. 2017, 22, 1542–1553. [Google Scholar] [CrossRef]
- de Castro, A.G.; de Andrade Pereira, W.C.; de Oliveira, C.M.; de Almeida, T.E.; Guazzelli, P.R.; de Almeida Monteiro, J.R.; de Oliveira Junior, A.A. Finite control-set predictive power control of BLDC drive for torque ripple reduction. IEEE Latin Am. Trans. 2018, 16, 1128–1135. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X. Finite-control-set model predictive control for eight-switch three-phase NPC converters. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 105–115. [Google Scholar] [CrossRef] [Green Version]
- Abbaszadeh, A.; Khaburi, D.A.; Rodríguez, J. Predictive control of permanent magnet synchronous motor with non-sinusoidal flux distribution for torque ripple minimisation using the recursive least square identification method. IET Electr. Power Appl. 2017, 11, 847–856. [Google Scholar] [CrossRef]
- Xia, C.; Deng, W.; Shi, T.; Yan, Y. Torque ripple minimization of PMSM using parameter optimization based iterative learning control. J. Electr. Eng. Technol. 2016, 11, 425–436. [Google Scholar] [CrossRef]
- Lalezar, G.; Nejad, S.M.; Mojiri, M. Enhancing surface-mounted permanent magnet synchronous motor drives in steady and transient states through improved MPCC method. Int. Trans. Electr. Energy Syst. 2020, 30, e12331. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, P.; Hang, J.; Ding, S.; Liu, L.; Wang, Q. Comparison of dynamic characteristics of field oriented control and model predictive control for permanent magnet synchronous motor. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 2431–2434. [Google Scholar]
- Tang, M.; Zhuang, S. On speed control of a permanent magnet synchronous motor with current predictive compensation. Energies 2019, 12, 65. [Google Scholar] [CrossRef] [Green Version]
- Shu, H.; Guo, C.; Song, Y.; Chen, X.; Luo, S. Design of model predictive controllers for PMSM drive system based on the extended Kalman filter observer. Int. J. Electr. Hybrid Veh. 2019, 11, 378–394. [Google Scholar] [CrossRef]
- He, Y.; Xu, Y. Dynamic Model Predictive Current Control Based on Deviation for Permanent Magnet Synchronous Motor. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 313–317. [Google Scholar]
- Zaky, M.S.; Morsi, M.A.; Shokrallah, S.S. High dynamic performance of interior permanent magnet synchronous motor drives based on feed-forward load torque compensator. Electr. Power Compon. Syst. 2013, 41, 235–251. [Google Scholar] [CrossRef]
- Yunfei, L.; Chengning, Z. A comparative experimental analysis of PMSM between deadbeat prediction current control and field-oriented control. Energy Procedia 2019, 158, 2488–2493. [Google Scholar] [CrossRef]
- Lara, J.; Xu, J.; Chandra, A. Effects of rotor position error in the performance of field-oriented-controlled PMSM drives for electric vehicle traction applications. IEEE Trans. Ind. Electron. 2016, 63, 4738–4751. [Google Scholar] [CrossRef]
- Razia Sultana, W.; Sahoo, S.K. Finite control set model predictive current control for a cascaded multilevel inverter. J. Electr. Eng. Technol. 2016, 11, 1674–1683. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Mei, X.; Tao, P.; Kennel, R.; Rodriguez, J. Predictive field-oriented control for electric drives. Chin. J. Electr. Eng. 2017, 3, 73–78. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Stator three phase voltages | |
| Direct and Quadrature axis voltages | |
| Direct and Quadrature axis currents | |
| Rotor flux linkages | |
| Number of pole pairs | |
| present value of Quadrature axis voltage | |
| present value of Direct axis current | |
| present value of Quadrature axis current | |
| Reference value of Direct axis current | |
| Reference value of Quadrature axis current | |
| Electro magnetic Torque | |
| Stator restistance per phase | |
| Stator inductance per pahse | |
| Sampling time | |
| present value of Direct axis voltage | |
| Future value of Direct axis current | |
| Future value of Quadrature axis current | |
| Angular velocity of the rotor | |
| Reference Torque | |
| Maximum permissible dq currents for motor | |
| Switching state minimization | |
| WLTP | Worldwide Harmonized Light Vehicles Test Procedure |
| Parameter | Value |
|---|---|
| Rotor Type | Salient Pole |
| Stator Resistance per phase | 0.02 Ω |
| Direct and Quadrature Axis Inductance | 1.7 and 3.2 mH |
| Flux Linkage in Airgap | 0.2205 V.s |
| No. of Pole Pairs | 4 |
| Rated Torque | 8 Nm |
| Rated Speed | 2000 rpm |
| Rated Power | 2.8 kW |
| PI Controller 1 | KP = 0.1, KI = 0.1 |
| PI Controller 2 | KP = 7.74, KI = 26.84 |
| PI Controller 3 | KP = 7.74, KI = 26.84 |
| Parameter | Value |
|---|---|
| Weight | 125 kg |
| Rolling resistance coefficient (Crr) | 0.01 |
| Drag coefficient (Cd) | 0.2 |
| Frontal area | 0.85 square meters |
| Wheel radius | 0.16 m |
| Air density | 1.22 kg/meter cube |
| Velocity | 75 Kmph |
| Steady State Characteristic | FOC | FCS-MPC |
|---|---|---|
| Speed SSE (%) | 0.15 | −0.003 |
| Torque Ripple (%) | 0.2 | 0.14 |
| Operating Condition | Dynamic Characteristic | FOC | FCS-MPC |
|---|---|---|---|
| Ramp change in speed at t = 0.1 s | Speed Undershoot (%) Speed Overshoot (%) | 15 0 | 0 0 |
| Speed Settling Time (s) | 0.01 | 0.005 | |
| Ramp change in speed at t = 0.3 s | Speed Overshoot (%) | 0.01 | 0 |
| Speed Settling Time (s) | 0.003 | 0.0001 | |
| Torque step increase from 1 to 5 Nm | Torque Settling Time (s) | 0.005 | 0.004 |
| Torque step decrease from 5 to 1 Nm | Torque Settling Time (s) | 0.0045 | 0.005 |
| Steady State Characteristic | FOC | FCS-MPC |
|---|---|---|
| Speed SSE (%) | 2 | 0.004 |
| Torque Ripple (%) | 0.15 | 0.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murali, A.; Wahab, R.S.; Gade, C.S.R.; Annamalai, C.; Subramaniam, U. Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles. World Electr. Veh. J. 2021, 12, 41. https://doi.org/10.3390/wevj12010041
Murali A, Wahab RS, Gade CSR, Annamalai C, Subramaniam U. Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles. World Electric Vehicle Journal. 2021; 12(1):41. https://doi.org/10.3390/wevj12010041
Chicago/Turabian StyleMurali, Abhishek, Razia Sultana Wahab, Chandra Sekhar Reddy Gade, Chitra Annamalai, and Umashankar Subramaniam. 2021. "Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles" World Electric Vehicle Journal 12, no. 1: 41. https://doi.org/10.3390/wevj12010041
APA StyleMurali, A., Wahab, R. S., Gade, C. S. R., Annamalai, C., & Subramaniam, U. (2021). Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles. World Electric Vehicle Journal, 12(1), 41. https://doi.org/10.3390/wevj12010041