
Magnetic Gears and Magnetically Geared Machines with Reduced Rare-Earth Elements for Vehicle Applications


Abstract
:1. Introduction
1.1. Main Introduction
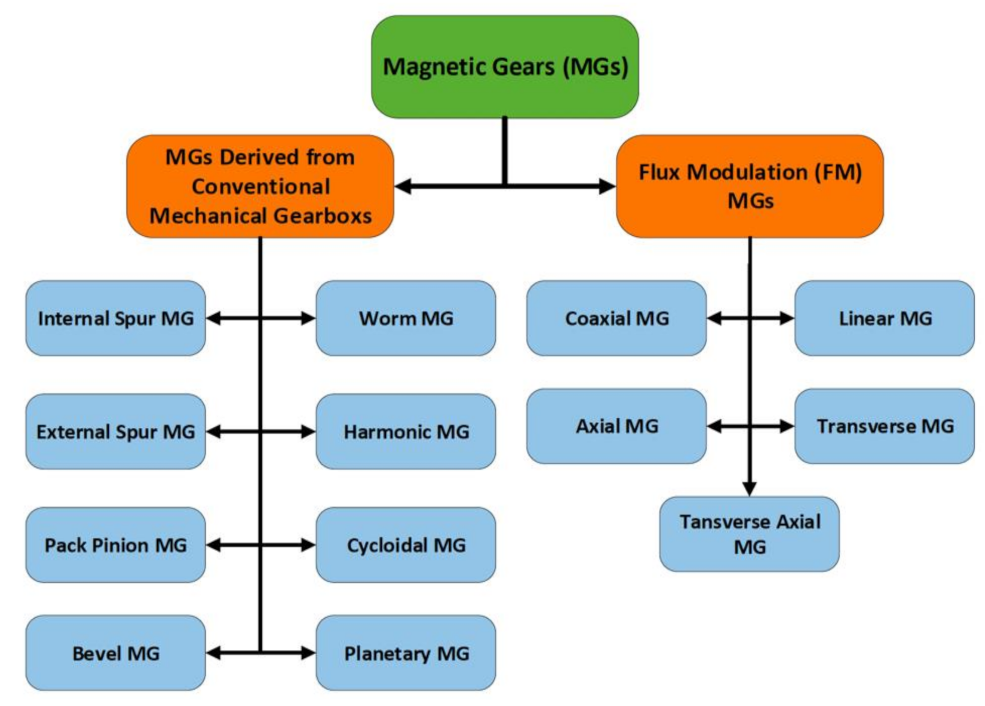
1.2. Literature Review on Flux Modulation Magnetic Gears
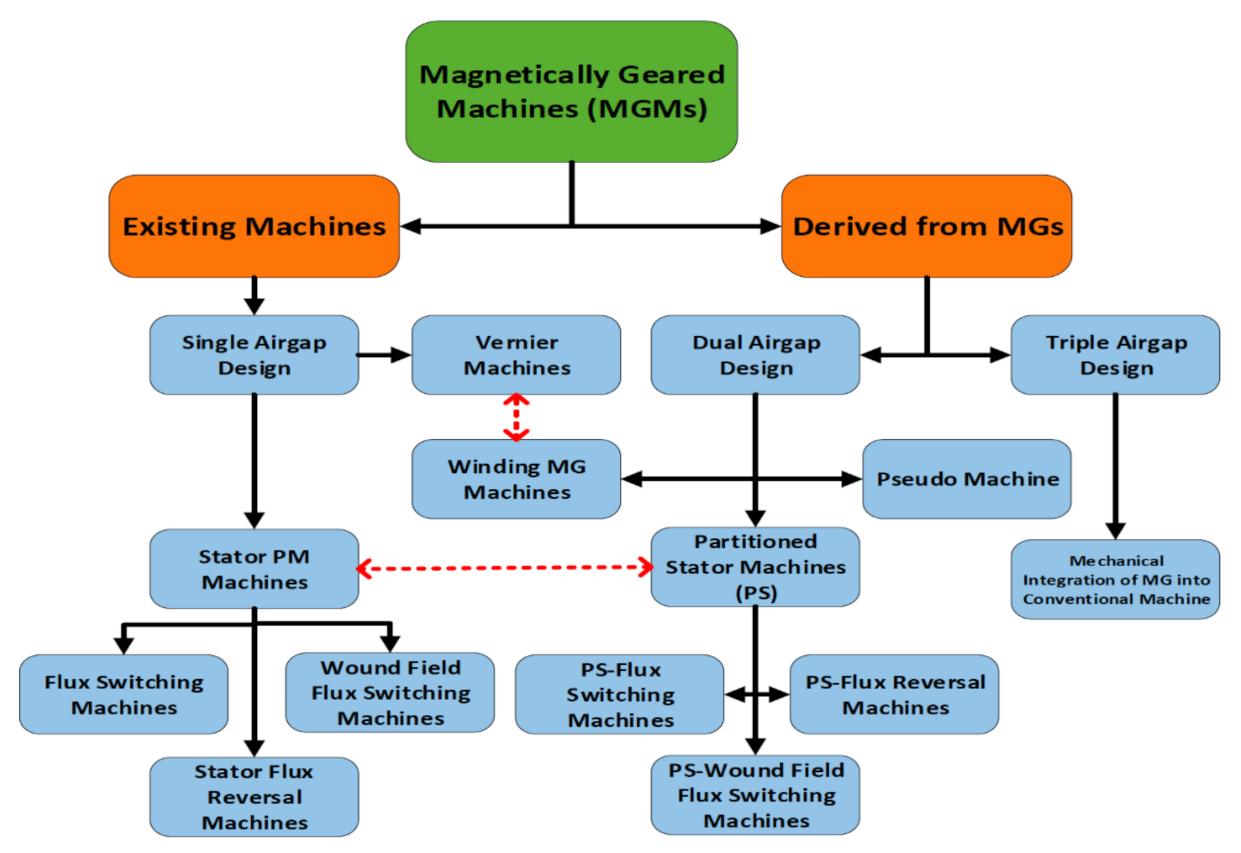
1.3. Literature Review on Magnetically Geared Machines
1.4. Challenges of Magntic Gears and Magnetically Geard Machines
1.5. Motivation of This Study
1.6. Objective and Organization of This Paper
2. High Torque Density Low-Cost Flux Modulation-Coaxial Magnetic Gear
2.1. Intorduction and Application
2.2. Baseline Design, Materials, and Specifications
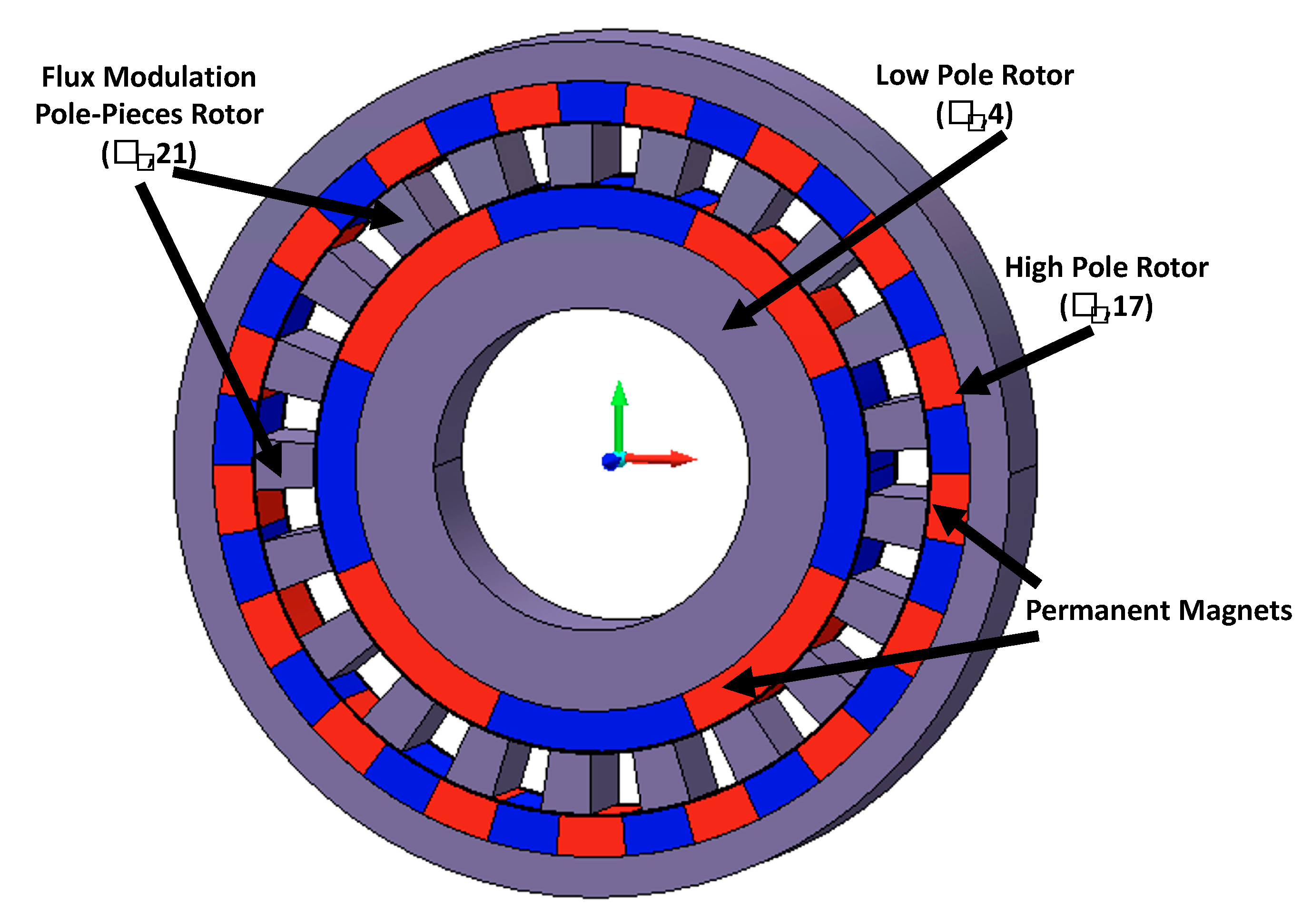
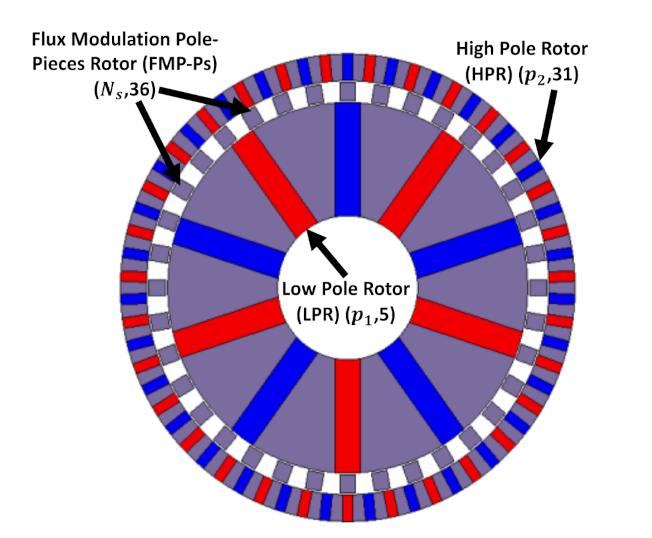
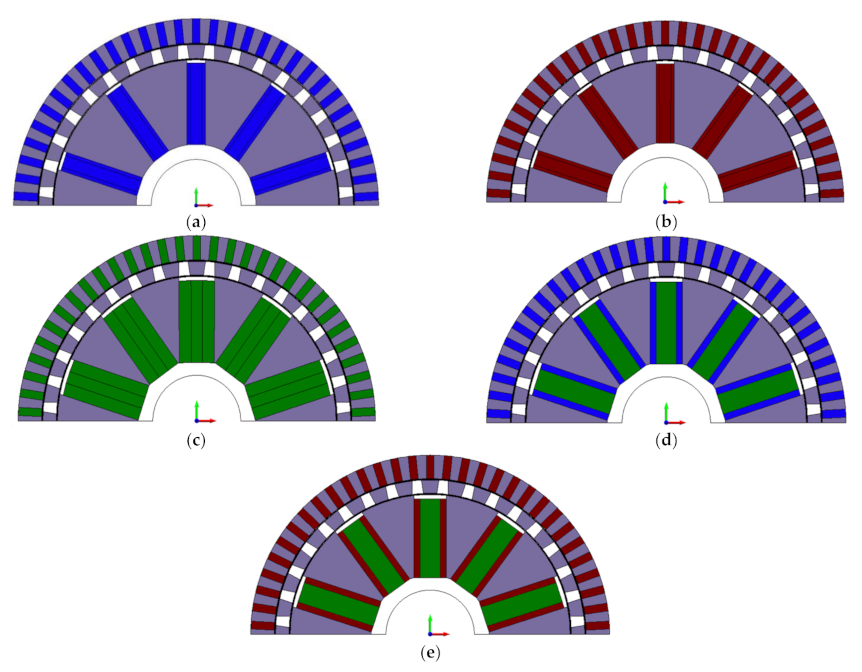
2.3. Design Configuration
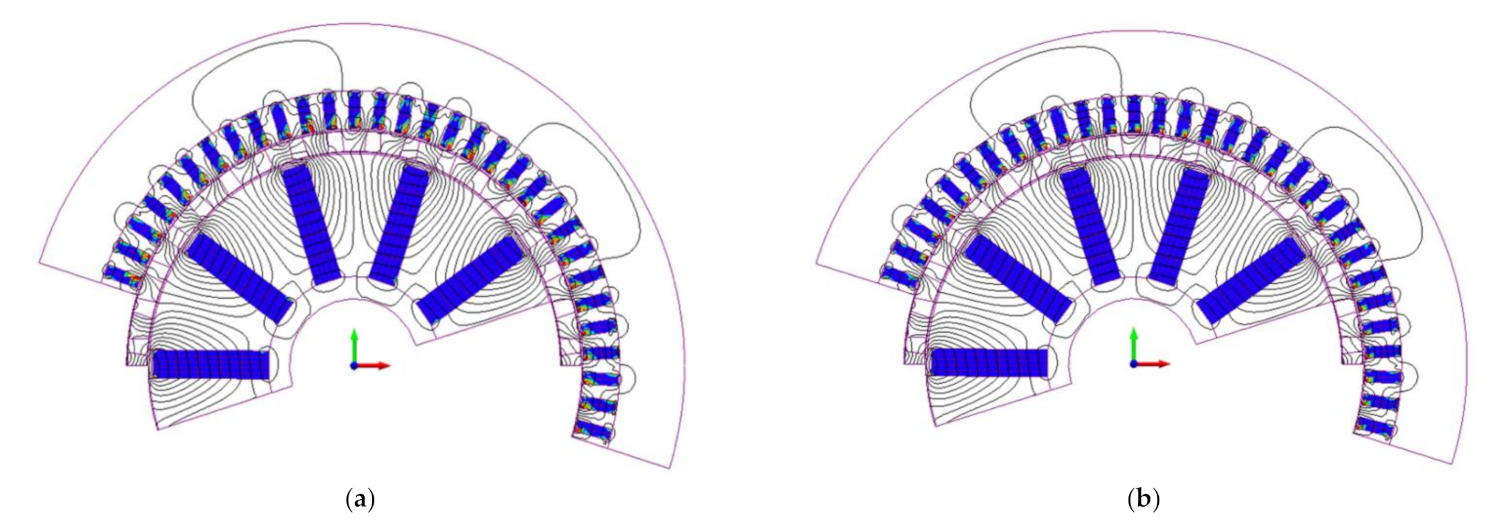
2.4. Torque Capabilities Repersenation
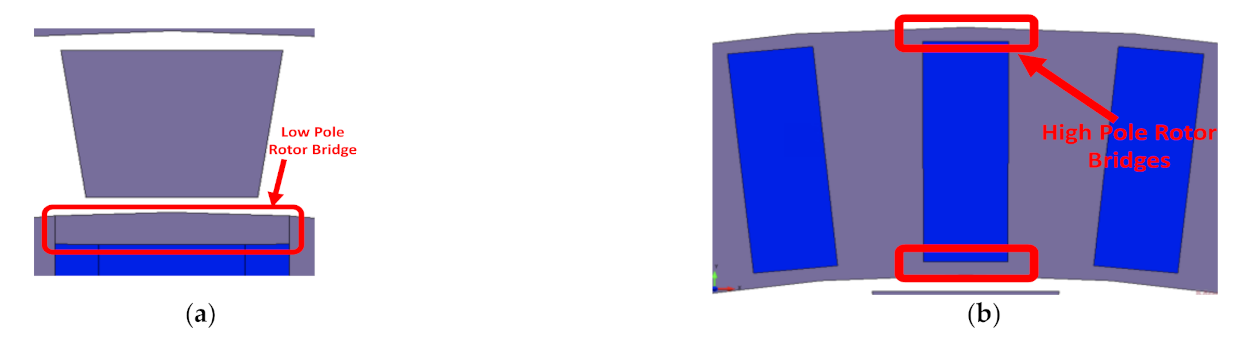
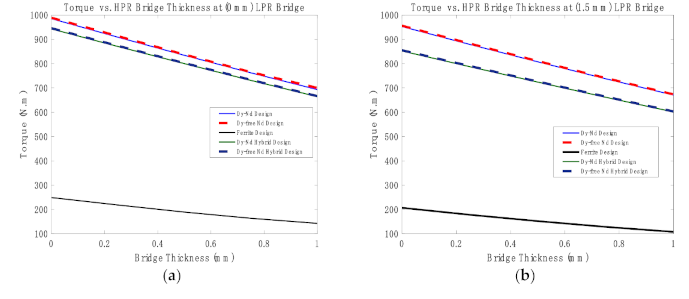
2.5. Impact of Rotors Retention
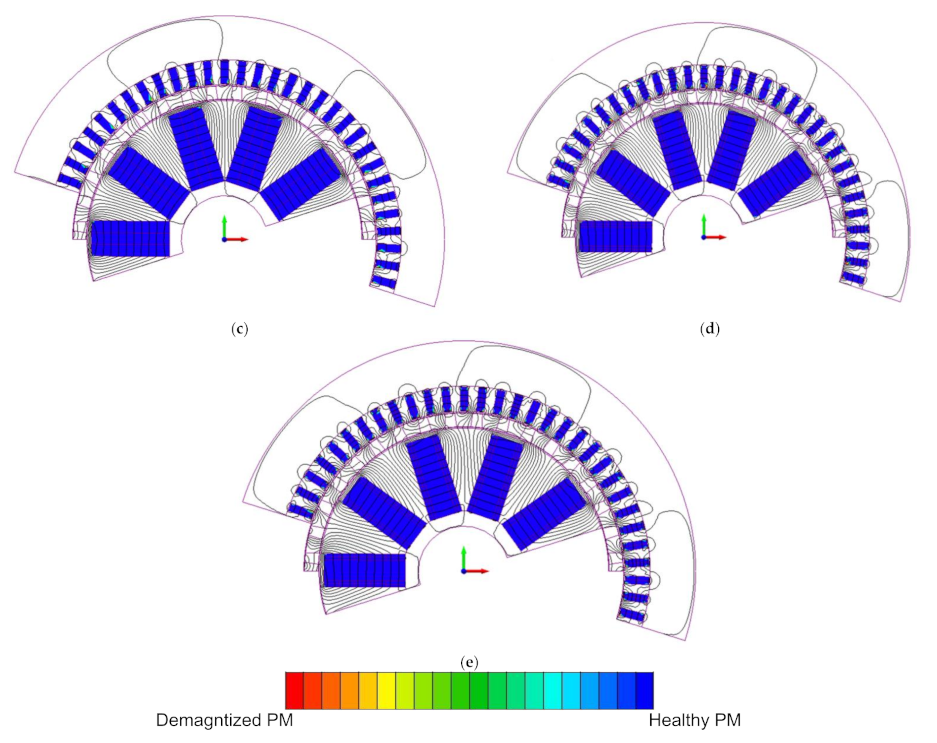
2.6. Evaluation of PM Demagnetization
2.7. Efficiency and Cost Analysis
3. Partitioned-Stator Permanent Magnet Flux Switching Machines with Reduced Rare-Earth Content
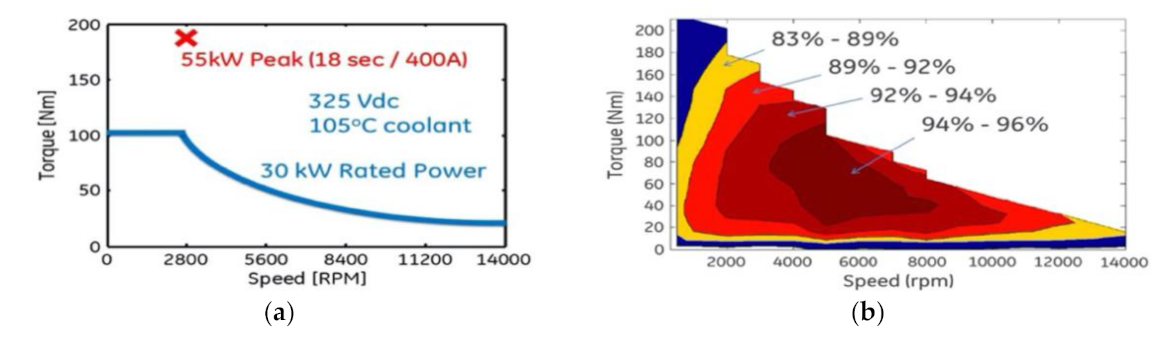
3.1. Introduction and Specifications
3.2. Materials
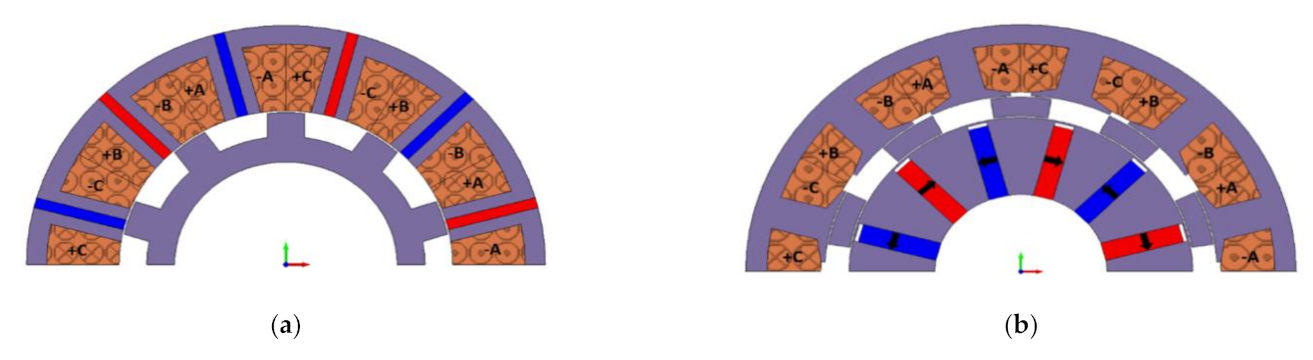
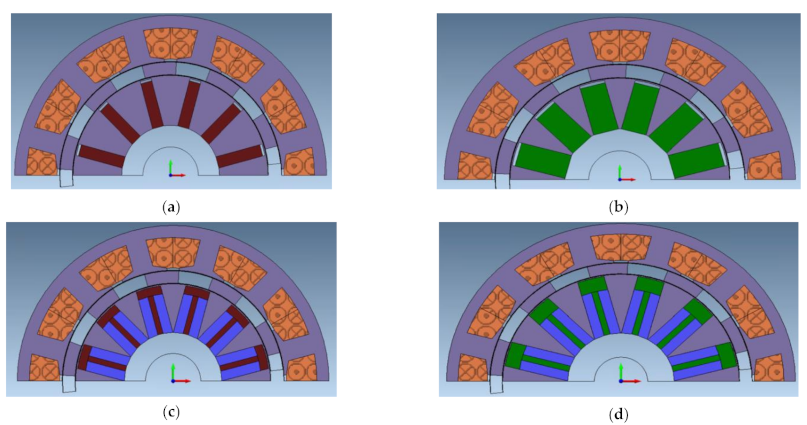
3.3. Considered Designs
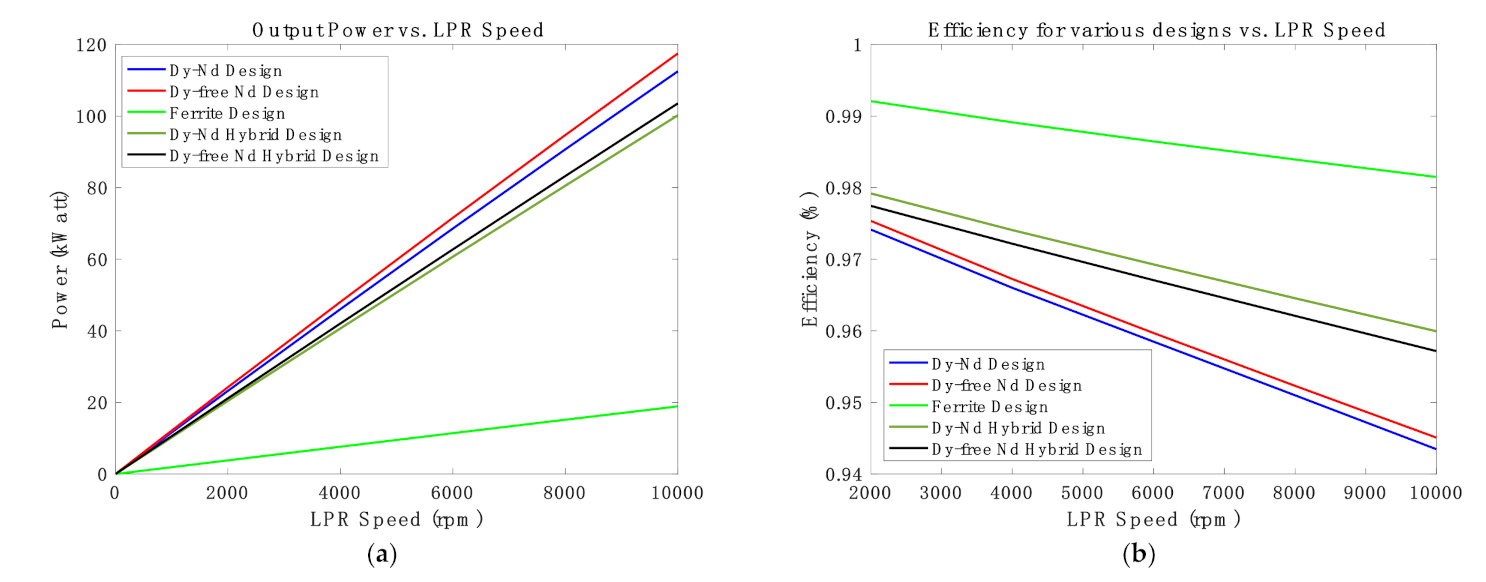
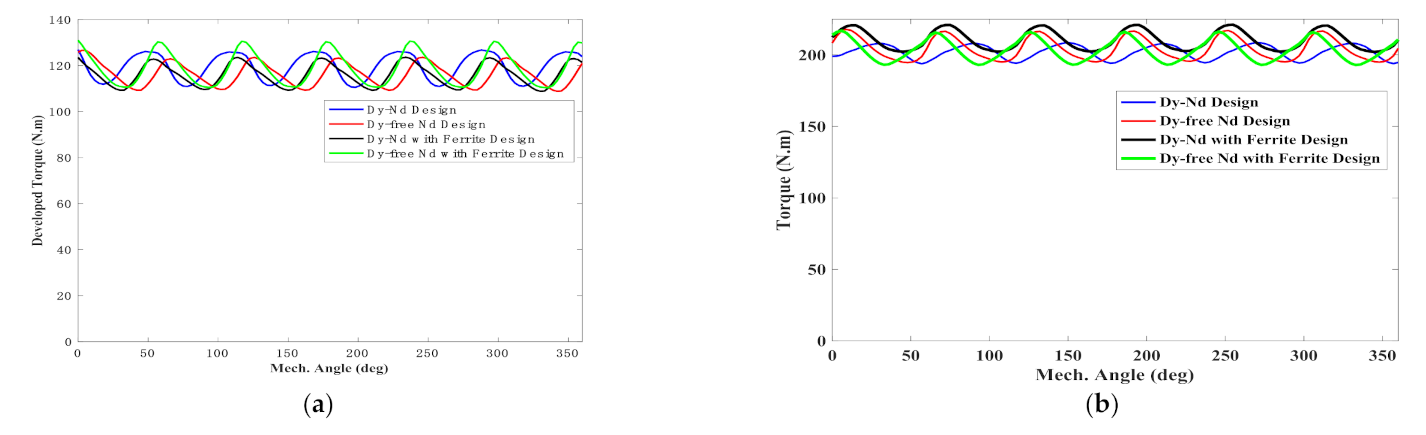
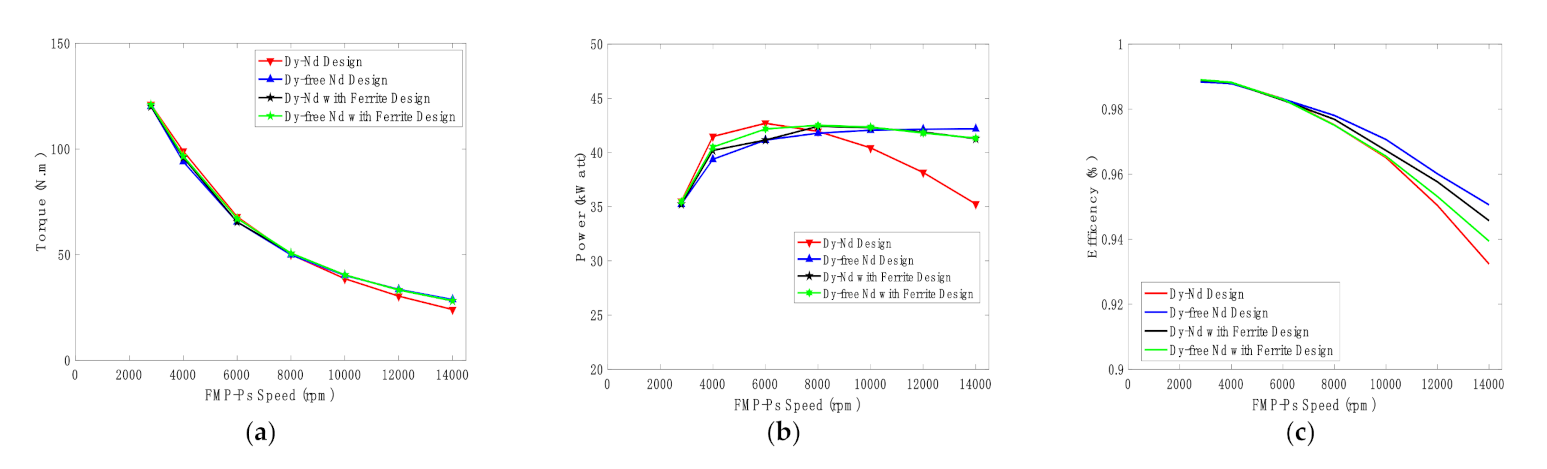
3.4. Electromagnetic Performance
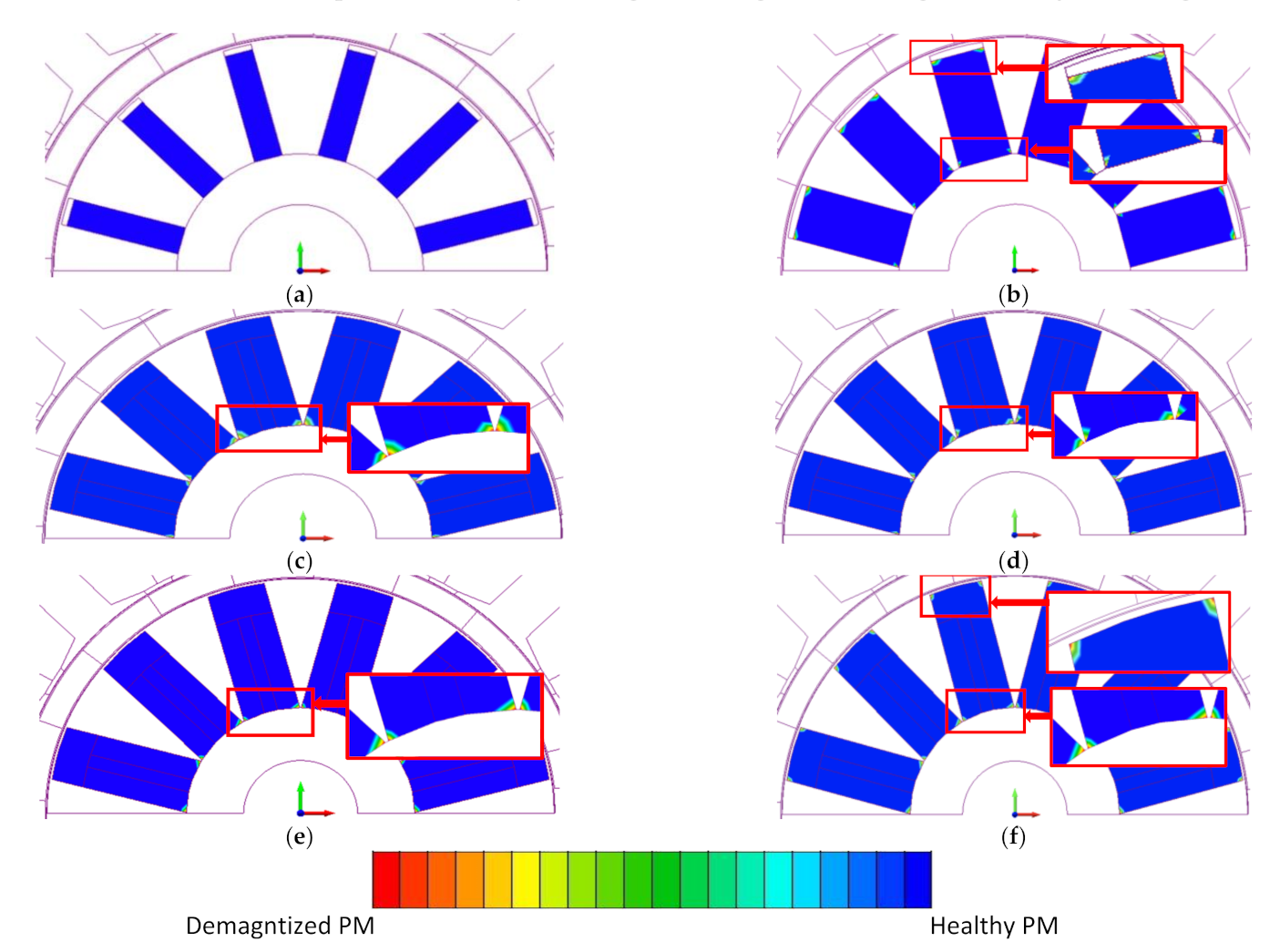
3.5. Demagnetization Analysis
3.6. Cost Analysis
4. Discussion and Overview
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Ragheb, A.; Ragheb, M. Wind turbine gearbox technologies. In Proceedings of the 2010 1st International Nuclear & Renewable Energy Conference (INREC), Amman, Jordan, 21–24 March 2010; pp. 1–8. [Google Scholar]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef] [Green Version]
- Tlali, P.M.; Wang, R.; Gerber, S. Magnetic gear technologies. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 544–550. [Google Scholar]
- Wang, Y.; Filippini, M.; Bianchi, N.; Alotto, P. A Review on Magnetic Gears: Topologies, Computational Models and Design Aspects. In Proceedings of the XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 527–533. [Google Scholar]
- Li, K.; Bird, Z. A Review of the Volumetric Torque Density of Rotary Magnetic Gear Designs. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 2016–2022. [Google Scholar]
- Praslicka, B.; Gardner, M.C.; Johnson, M.; Toliyat, H.A. Review and Analysis of Coaxial Magnetic Gear Pole Pair Count Selection Effects. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 1. [Google Scholar] [CrossRef]
- Shah, L.; Cruden, A.; Williams, B.W. A Variable Speed Magnetic Gear Box Using Contra-Rotating Input Shafts. IEEE Trans. Magn. 2011, 47, 431–438. [Google Scholar]
- Rasmussen, P.O.; Andersen, T.O.; Jorgensen, F.T.; Nielsen, O. Development of a high-performance magnetic gear. IEEE Trans. Ind. Appl. 2005, 41, 764–770. [Google Scholar] [CrossRef]
- Liu, X.; Chau, K.T.; Jiang, J.Z.; Yu, C. Design and analysis of interior-magnet outer-rotor concentric magnetic gears. J. Appl. Phys. 2009, 105, 07F101. [Google Scholar] [CrossRef]
- Jian, L.; Chau, K.T. A coaxial magnetic gear with halbach permanent-magnet arrays. IEEE Trans. Energy Convers. 2010, 25, 319–328. [Google Scholar] [CrossRef] [Green Version]
- Aiso, K.; Akatsu, K. A novel reluctance magnetic gear for high-speed motor. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar]
- Frank, N.W.; Pakdelian, S.; Toliyat, H.A. Passive suppression of transient oscillations in the concentric planetary magnetic gear. IEEE Trans. Energy Convers. 2011, 26, 933–939. [Google Scholar] [CrossRef]
- Uppalapati, K.K.; Bomela, W.B.; Bird, J.Z.; Calvin, M.D.; Wright, J.D. Experimental evaluation of low-speed flux-focusing magnetic gearboxes. IEEE Trans. Ind. Appl. 2014, 50, 3637–3643. [Google Scholar] [CrossRef]
- Uppalapati, K.K.; Bird, J.Z.; Wright, J.; Pitchard, J.; Calvin, M.; Williams, W. A magnetic gearbox with an active region torque density of 239Nm/L. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1422–1428. [Google Scholar]
- Fu, W.N.; Li, L. Optimal design of magnetic gears with a general pattern of permanent magnet arrangement. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, W.N.; Li, W. Performance analysis of a novel triple-permanent-magnet- excited magnetic gear and its design method. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Som, D.; Li, K.; Kadel, J.; Wright, J.; Modaresahmadi, S.; Bird, J.Z.; William, W. Analysis and testing of a coaxial magnetic gearbox with flux concentration halbach rotors. IEEE Trans. Magn. 2017, 53, 1–6. [Google Scholar] [CrossRef]
- Esnoz-Larraya, J. OPTIMAGDRIVE: High-performance magnetic gears development for space applications. In Proceedings of the European Space Mechanisms and Tribology Symposium, Hatfield, UK, 20–22 September 2017. [Google Scholar]
- Mezani, S.; Atallah, K.; Howe, D. A high-performance axial-field magnetic gear. J. Appl. Phys. 2006, 99, 08R303. [Google Scholar] [CrossRef]
- Johnson, M.; Shapoury, A.; Boghrat, P.; Post, M.; Toliyat, H.A. Analysis and development of an axial flux magnetic gear. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 5893–5900. [Google Scholar]
- Johnson, M.; Gardner, M.C.; Toliyat, H.A. Analysis of axial field magnetic gears with Halbach arrays. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 108–114. [Google Scholar]
- Acharya, V.M.; Calvin, M.; Bird, J.Z. A low torque ripple flux focusing axial magnetic gear. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–6. [Google Scholar]
- Li, Y.; Xing, J.; Peng, K.; Lu, Y. Principle and simulation analysis of a novel structure magnetic gear. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 3845–3849. [Google Scholar]
- Bomela, W.; Bird, J.Z.; Acharya, V.M. The performance of a transverse flux magnetic gear. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Zhu, D.; Yang, F.; Du, Y.; Xiao, F.; Ling, Z. An axial-field flux modulated magnetic gear. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Peng, S.; Fu, W.N.; Ho, S.L. A novel triple-permanent-magnet excited hybrid-flux magnetic gear and its design method using 3-Dfinite element method. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar]
- Yin, X.; Pfister, P.D.; Fang, Y. A novel magnetic gear: Toward a higher torque density. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, W. A novel hybrid-flux magnetic gear and its performance analysis using the 3-D finite element method. Energies 2015, 8, 3313–3327. [Google Scholar] [CrossRef] [Green Version]
- Atallah, K.; Wang, J.; Howe, D. A high-performance linear magnetic gear. J. Appl. Phys. 2005, 97, 10N516. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Li, H.Y.; Deodhar, R.; Pride, A.; Sasaki, T. Recent developments and comparative study of magnetically geared machines. CES Trans. Electr. Mach. Syst. 2018, 2, 13–22. [Google Scholar] [CrossRef]
- Jian, L.; Chau, K.T.; Jiang, J.Z. A Magnetic-Geared Outer-Rotor Permanent-Magnet Brushless Machine for Wind Power Generation. IEEE Trans. Industry Appl. 2009, 45, 954–962. [Google Scholar]
- Atallah, K.; Rens, J.; Mezani, S.; Howe, D. A novel ‘pseudo’ direct-drive brushless permanent magnet machine. IEEE Trans. Magn. 2008, 44, 4605–4617. [Google Scholar]
- Tlali, P.M.; Gerber, S.; Wang, E.J. Optimal design of an outer-stator magnetically geared permanent magnet machine. IEEE Trans. Magn. 2016, 52, 8100610. [Google Scholar]
- Wang, L.L.; Shen, J.X.; Jin, M.J. Design of a multi-power-terminals permanent magnet machine with magnetic field modulation. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS 2011), Beijing, China, 20–23 August 2011. [Google Scholar]
- Zhang, X.; Liu, X.; Chen, Z. A Novel Coaxial Magnetic Gear and Its Integration with Permanent-Magnet Brushless Motor. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar]
- Zhu, Z.Q.; Khatab, M.F.; Li, H.; Liu, Y. A Novel Axial Flux Magnetically Geared Machine for Power Split Application. IEEE Trans. Ind. Appl. 2018, 54, 5954–5966. [Google Scholar] [CrossRef]
- Chmelicek, P.; Calverley, S.D.; Dragan, R.S.; Atallah, K. Dual rotor magnetically geared power split device for hybrid electric vehicles. IEEE Trans. Ind. Appl. 2018, 55, 1484–1494. [Google Scholar]
- Wu, Z.Z.; Zhu, Z.Q. Analysis of Magnetic Gearing Effect in Partitioned Stator Switched Flux PM Machines. IEEE Trans. Energy Convers. 2016, 31, 1239–1249. [Google Scholar] [CrossRef]
- Zhu, Z.Q. Overview of novel magnetically geared machines with partitioned stators. IET Electr. Power Appl. 2018, 12, 595–604. [Google Scholar]
- Li, D.; Qu, R.; Li, J.; Xu, W.; Wu, L. Synthesis of Flux Switching Permanent Magnet Machines. IEEE Trans. Energy Convers. 2016, 31, 106–117. [Google Scholar] [CrossRef]
- Awah, C.C. Comparison of Partitioned Stator Switched Flux Permanent Magnet Machines Having Single- or Double-Layer Windings. IEEE Trans. Magn. 2016, 52, 1–10. [Google Scholar] [CrossRef]
- Wu, F.; El-Refaie, A.M. Permanent magnet vernier machine: A review. IET Electr. Power Appl. 2019, 13, 127–137. [Google Scholar] [CrossRef]
- Qu, R.; Li, D.; Wang, J. Relationship between magnetic gears and vernier machines. In Proceedings of the International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar]
- Lipo, T.L.; Liu, W.; Du, Z. Comparison of AC Motors to an Ideal Machine Part II-Non-Sinusoidal AC Machines. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019. [Google Scholar]
- Li, D.; Qu, R.; Lipo, T.A. High-Power-Factor Vernier Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2014, 50, 3664–3674. [Google Scholar] [CrossRef]
- Li, X.; Chau, K.T.; Cheng, M.; Kim, B.; Lorenz, R.D. Performance Analysis of a Flux-Concentrating Field-Modulated Permanent-Magnet Machine for Direct-Drive Applications. IEEE Trans. Magn. 2015, 51, 1–11. [Google Scholar]
- Rauch, S.E.; Johnson, L.J. Design principles of flux-switching alternators. AIEE Trans. 1955, 74, 1261–1268. [Google Scholar]
- McFarland, J.D.; Jahns, T.M.; EL-Refaie, A.M. Analysis of the Torque Production Mechanism for Flux-Switching Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2015, 51, 3041–3049. [Google Scholar] [CrossRef]
- Chen, J.T.; Zhu, Z.Q.; Thomas, A.S.; Howe, D. Optimal combination of stator and rotor pole numbers in flux-switching PM brushless AC machines. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 2905–2910. [Google Scholar]
- Chen, J.T.; Zhu, Z.Q. Winding Configurations and Optimal Stator and Rotor Pole Combination of Flux-Switching PM Brushless AC Machines. IEEE Trans. Energy Convers. 2010, 25, 293–302. [Google Scholar] [CrossRef]
- Owen, R.L.; Zhu, Z.Q.; Thomas, A.S.; Jewell, G.Q.; Howe, D. Alternate Poles Wound Flux-Switching Permanent-Magnet Brushless AC Machines. IEEE Trans. Ind. 2010, 46, 790–797. [Google Scholar] [CrossRef]
- McFarland, J.D.; Jahns, T.M.; El-Refaie, A.M. Demagnetization performance characteristics of flux switching permanent magnet machines. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 2001–2007. [Google Scholar]
- Raminosoa, T. Reduced Rare-Earth Flux-Switching Machines for Traction Applications. IEEE Trans. Ind. Appl. 2015, 51, 2959–2971. [Google Scholar] [CrossRef]
- Boldea, I.; Serban, E.; Babau, R. Flux-Reversal Stator-PM Single Phase Generator with Controlled dc. Output. In Proceedings of the OPTIM’96, Brasov, Romania, 15–17 May 1996; pp. 1124–1134. [Google Scholar]
- El-Refaie, A. Comparison of traction motors that reduce or eliminate rare-earth materials. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- McFarland, J.D.; Jahns, T.M.; EL-Refaie, A.M.; Reddy, P.B. Effect of magnet properties on power density and flux-weakening performance of high-speed interior permanent magnet synchronous machines. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; Institute of Electrical and Electronics Engineers: Pittsburgh, PA, USA, 2014; pp. 4218–4225. [Google Scholar]
- Du, Z.S.; Lipo, T.A. Interior permanent magnet machines with rare earth and ferrite permanent magnets. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–8. [Google Scholar]
- Galioto, S.J.; Reddy, P.B.; EL-Refaie, A.M.; Alexander, J.P. Effect of Magnet Types on Performance of High-Speed Spoke Interior-Permanent-Magnet Machines Designed for Traction Applications. IEEE Trans. Ind. Appl. 2015, 51, 2148–2160. [Google Scholar] [CrossRef]
- Al-Qarni, A.; Wu, F.; El-Refaie, A. High-Torque-Density Low-Cost Magnetic Gear Utilizing Hybrid Magnets and Advanced Materials. In Proceedings of the 2019 IEEE International Electric Machines and Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019. [Google Scholar]
- Al-Qarni, A.; El-Refaie, A. Partitioned Stator- Flux Switching Machine Utilizing Different Magnet Grades. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019. [Google Scholar]
- Nissan Leaf. Available online: http://www.carinf.com/en/9e60422878.html (accessed on 27 February 2021).
- Sasaki, S. Toyota’s newly developed hybrid power train. In Proceedings of the IEEE International Symposium on Power Semiconductor Devices ICs, Kyoto, Japan, 3–6 June 1997; pp. 17–22. [Google Scholar]
- Chen, Y.; Fu, W.N.; Ho, S.L.; Liu, H. A Quantitative Comparison Analysis of Radial-Flux, Transverse-Flux, and Axial-Flux Magnetic Gears. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Li, X.; Chau, K.T.; Cheng, M.; Hua, W.; Du, Y. An improved coaxial magnetic gear using flux focusing. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011. [Google Scholar]
- EL-Refaie, A.M.; Jahns, T.M. Optimal flux weakening in surface PM machines using fractional-slot concentrated windings. IEEE Trans. Ind. Appl. 2005, 41, 790–800. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration Type | Gear Ratio | Torque/Force Density | Reference Number |
|---|---|---|---|
| Coaxial | 1:5.5 | (Prototype) > 100 kN·m/m3 | [2] |
| Coaxial | 1:5.5 | (Prototype) 54.5 kN·m/m3 | [8] |
| Coaxial | 1:7.33 | (Prototype) 53.3 kN·m/m3 | [9] |
| Coaxial | 1:4.25 | (Prototype) 108.3 kN·m/m3 | [10] |
| Coaxial | 1:8 | (Calculated) 29.4 kN·m/m3 | [11] |
| Coaxial | 1:5.5 | (Prototype) 42 kN·m/m3 | [12] |
| Coaxial | 1:4.25 | (Prototype) 66 kN·m/m3 | [13] |
| Coaxial | 1:4.25 | (Prototype) 151 kN·m/m3 | [13] |
| Coaxial | 1:4.25 | (Prototype) 239 kN·m/m3 | [14] |
| Coaxial | 1:7.33 | (Calculated) 382.7 kN·m/m3 | [15] |
| Coaxial | 1:7.33 | (Calculated) 226 kN·m/m3 | [16] |
| Coaxial | 1:4.25 | (Prototype) 82.8 kN·m/m3 | [17] |
| Coaxial | 1:75 | (Prototype) 37.1 kN·m/m3 | [18] |
| Axial | 1:5.75 | (Calculated) 70 kN·m/m3 | [19] |
| Axial | 1:8 | (Calculated) 22.4 kN·m/m3 | [20] |
| Axial | 1:4.14 | (Calculated) 183.9 kN·m/m3 | [21] |
| Axial | 1:4.17 | (Calculated) 289.9 kN·m/m3 | [22] |
| Transverse | 1:6.5 | (Calculated) 2.4 kN·m/m3 | [23] |
| Transverse | 1:3.75 | (Calculated) 80.6 kN·m/m3 | [24] |
| Transverse | 1:4.25 | (Calculated) 77 kN·m/m3 | [25] |
| Transverse-Axial | 1:5.5 | (Calculated) 181.2 kN·m/m3 | [26] |
| Transverse-Axial | 1:4.17 | (Calculated) 268.4 kN·m/m3 | [27] |
| Transverse-Axial | 1:5.5 | (Calculated) 108 kN·m/m3 | [28] |
| Linear | 1:3.25 | (Calculated) 1.7 MN/m3 | [29] |
| Classification Criteria | Description of Configuration | Reference Number |
|---|---|---|
| Triple Airgap Design | Mechanical Integration of FM-MGs into electric conventional machine | [31] |
| Dual Airgap Design | Pseudo Machine Winding MG Machine Partitioned Stator Machines | [32,33,34,35,36] [37] [38,39,40,41] |
| Single Airgap Design | Vernier Machine Stator Permanent Magnet (PM) or Wound Field Machines | [42,43,44,45,46] [47,48,49,50,51,52,53,54] |
| PM Commercial Name | Temperature °C | Remanence (Br)—Tesla | Coercivity (Hc)—kA/m | Demagnetization (Bdemag)—Tesla |
|---|---|---|---|---|
| Dy-NdFeB Arnold N40H | 20 | 1.28 | −985.6 | −0.48 |
| 80 | 1.19 | −909.8 | 0.062 | |
| Dy-free NdFeB VACODYM 247AP | 20 | 1.28 | −987 | −0.772 |
| 80 | 1.22 | −931 | −0.0129 | |
| Ferrite Hitachi NMF-15G | 20 | 0.48 | −360 | −0.05 |
| 80 | 0.43 | −320 | −0.17 |
| Material Commercial Name | Price Assumption ($/kg) | Volumetric Mass Density (KG/M3) |
|---|---|---|
| Arnold N40H | 100 | 7500 |
| VACODYM 247AP | 60 | 7600 |
| Hitachi NMF-15G | 10 | 4800 |
| DI-MAX HF-10 by AK Steel | 2 | 7600 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Inner radius of LPR | 40 mm | Stack Length | 86 mm |
| Outer radius of LPR | 95 mm | LPR pole-pairs count | 5 (Rotational) |
| LPR PM width | 12.5 mm | HPR pole-pairs count | 31 (Fixed) |
| Airgap thickness | 1 mm | FMP-Ps count | 36 (Rotational) |
| FMP-Ps radial height | 9 mm | Gear ratio | 1:7.2 |
| Inner radius of HPR | 106 mm | FMP-Ps rotational speed | 1388.88 rpm |
| Outer radius of HPR | 122 mm | LPR rotational speed | 10,000 rpm |
| HPR PM width | 5.3 mm | PM Type | Arnold N40H |
| Design | Torque on Components (N·m) | PM Mass (kg) | Lamination Mass (kg) | Volume (Liter) | Torque Density (kN·m/m3) | ||
|---|---|---|---|---|---|---|---|
| LPR | FMP-Ps | NdFeB | Ferrite | ||||
| Dy-NdFeB Design | −136.8 | 985 | 7.7 | -- | 17 | 4.02 | 245 |
| Dy-free NdFeB Design | −137.3 | 988.8 | 7.9 | -- | 17 | 4.02 | 245.9 |
| Ferrite PM Design | −34.5 | 248.8 | -- | 7.55 | 12.7 | 4.02 | 61.9 |
| Dy-NdFeB with Ferrite Design | −131 | 942.7 | 6.4 | 3 | 13.5 | 4.02 | 234.4 |
| Dy-free NdFeB with Ferrite Design | −131.3 | 945.6 | 6.5 | 3 | 13.5 | 4.02 | 235.2 |
| Design | Torque on FMP-Ps at 80 °C (N·m) | Torque Density at 80 °C (kN·m/m3) | Active Material Cost ($) | PM NdFeB Utilization Efficiency (N·m/kg) |
|---|---|---|---|---|
| Dy-NdFeB Design | 706 | 175.5 | 811.5 | 90.8 |
| Dy-free NdFeB Design | 735.3 | 182.8 | 506.8 | 93.3 |
| Ferrite PM Design | 114 | 28.3 | 100.9 | -- |
| Dy-NdFeB with Ferrite Design | 618.4 | 153.8 | 698.5 | 96.4 |
| Dy-free NdFeB with Ferrite Design | 640.4 | 159.2 | 447 | 98.5 |
| Requirement | Target | Condition |
|---|---|---|
| Maximum top speed | 14,000 rpm | at 20% speed and nominal voltage |
| Peak output power | 55 kW for 18 sec | |
| Continuous output power | 30 kW | at 20~100% speed and nominal voltage |
| Weight | ≤35 kg | |
| Operating DC bus voltage | 200~450 V (325 V nominal) | at 140 °C |
| Maximum phase current | 400 Arms | |
| Torque pulsation | <5% peak torque | at any speed |
| PM Commercial Name | Temperature°C | Remanence (Br)—Tesla | Coercivity (Hc)—kA/m | Demagnetization (Bdemag)—Tesla |
|---|---|---|---|---|
| Dy-NdFeB Vacuumschelze VACODYM 890 TP | 140 | 1.065 | −782 | −0.74 |
| Dy-free NdFeB Magnequench MQ2-14-12 | 140 | 0.7 | −400 | −0.23 |
| Ferrite Hitachi NMF-12K | −40 | 0.48 | −365 | −0.21 |
| 140 | 0.32 | −250 | −0.282 |
| Material Commercial Name | Price Assumption ($/kg) | Volumetric Mass Density (kg/m3) |
|---|---|---|
| VACODYM 890 TP | 120 | 7700 |
| MQ2-14-12 | 30 | 7620 |
| Hitachi NMF-12K | 10 | 4800 |
| M-19 29 Gauge | 2 | 7650 |
| 100% IACS Copper | 3 | 8940 |
| Parameter\Design Name | Dy-NdFeB Design | Dy-Free NdFeB Design | Dy-NdFeB with Ferrite Design | Dy-free NdFeB with Ferrite Design | |
|---|---|---|---|---|---|
| Inner radius of inner stator (mm) | 44 | 44 | 44 | 50 | |
| Outer radius of outer stator (mm) | 88 | 88 | 88 | 111 | |
| FMP-Ps thickness (mm) | 11 | 11 | 11 | 11 | |
| Inner radius of inner stator (mm) | 100.5 | 100.5 | 100.5 | 123.5 | |
| Outer radius of inner stator (mm) | 141 | 141 | 141 | 164 | |
| Stack length (mm) | 80 | 90 | 88 | 80 | |
| PM masses (kg) | NdFeB | 3.2 | 7 | 2.8 | 4.63 |
| Ferrite | 0 | 0 | 3.2 | 4.14 | |
| Lamination mass (kg) | 18.5 | 17.3 | 15.9 | 22.3 | |
| Copper mass (kg) | 5 | 5.6 | 5.5 | 5 | |
| Overall active machine mass (kg) | 26.7 | 29.9 | 27.4 | 36 | |
| Machine (Liter) | 5 | 5.62 | 5.5 | 6.75 | |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Number of turns in series per phase | 5 | Maximum speed (rpm) | 14,000 |
| Number of turns in series per phase | 20 | FMP-Ps (Rotor) pole-pairs | 10 |
| Maximum RMS phase current (Arms) | 400 | Inner stator (PMs) pole-pairs | 6 |
| Rated RMS phase current (Arms) | 200 | Outer stator (winding) pole-pairs | 4 |
| Rated RMS current density (Arms/mm2) | 4.5 | Machine frequency at base speed (Hz) | 466.66 |
| Base speed (rpm) | 2800 | Rated simulation. Temperature (°C) | 140 |
| Design | Torque Density (kN·m/m3) | Power Density (kW/m3) | Active Material Cost ($) |
|---|---|---|---|
| Dy-NdFeB Design | 24.2 | 7048.8 | 436 |
| Dy-free NdFeB Design | 21.37 | 7504 | 261.4 |
| Dy-NdFeB with Ferrite Design | 21.7 | 7503.5 | 416.3 |
| Dy-free NdFeB with Ferrite Design | 17.9 | 6121.5 | 240 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Qarni, A.; EL-Refaie, A. Magnetic Gears and Magnetically Geared Machines with Reduced Rare-Earth Elements for Vehicle Applications. World Electr. Veh. J. 2021, 12, 52. https://doi.org/10.3390/wevj12020052
Al-Qarni A, EL-Refaie A. Magnetic Gears and Magnetically Geared Machines with Reduced Rare-Earth Elements for Vehicle Applications. World Electric Vehicle Journal. 2021; 12(2):52. https://doi.org/10.3390/wevj12020052
Chicago/Turabian StyleAl-Qarni, Ali, and Ayman EL-Refaie. 2021. "Magnetic Gears and Magnetically Geared Machines with Reduced Rare-Earth Elements for Vehicle Applications" World Electric Vehicle Journal 12, no. 2: 52. https://doi.org/10.3390/wevj12020052
APA StyleAl-Qarni, A., & EL-Refaie, A. (2021). Magnetic Gears and Magnetically Geared Machines with Reduced Rare-Earth Elements for Vehicle Applications. World Electric Vehicle Journal, 12(2), 52. https://doi.org/10.3390/wevj12020052