
A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology


Abstract
:1. Introduction
2. Proposed Topology and Principle of Operation
2.1. Proposed Sub-Harmonic Synchronous Machine Topology
2.2. Principle of Operation
3. Design and Analysis of the Proposed Machine
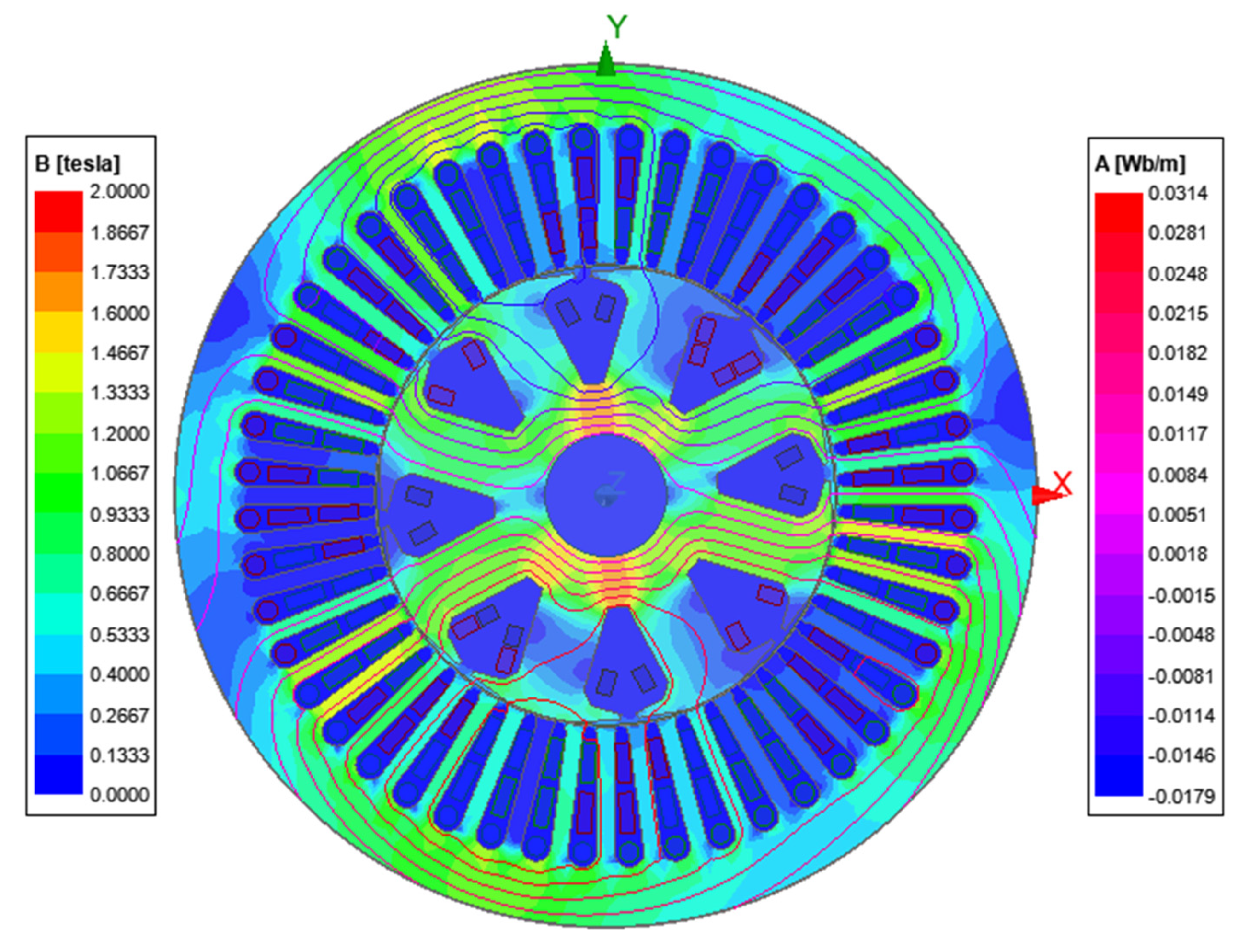
4. 2-D Finite Element Analysis
5. Conclusions
- Significantly greater torque generation.
- Utilizes maximum allowable stator slot space.
- Single inverter brushless usage
- No requirement of imposing complex unbalanced-cooling system.
Author Contributions
Funding
Conflicts of Interest
References
- Zdeněk, Č.; Pavel, M. Electric, hybrid electric and combustion engine driven cars and their impact on environment. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–5. [Google Scholar]
- Aruna, P.; Vasan, P.V. Review on Energy Management System of Electric Vehicles. In Proceedings of the 2019 2nd International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, India, 21–23 August 2019; pp. 371–374. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Chu, W.Q.; Guan, Y. Quantitative comparison of electromagnetic performance of electrical machines for HEVs/EVs. CES Trans. Electr. Mach. Syst. 2017, 1, 37–47. [Google Scholar] [CrossRef]
- Pellegrino, G.; Vagati, A.; Boazzo, B.; Guglielmi, P. Comparison of Induction and PM Synchronous Motor Drives for EV Application Including Design Examples. IEEE Trans. Ind. Appl. 2012, 48, 2322–2332. [Google Scholar] [CrossRef] [Green Version]
- Sarlioglu, B.; Morris, C.T.; Han, D.; Li, S. Driving Toward Accessibility: A Review of Technological Improvements for Electric Machines, Power Electronics, and Batteries for Electric and Hybrid Vehicles. IEEE Ind. Appl. Mag. 2017, 23, 14–25. [Google Scholar] [CrossRef]
- Pellegrino, G.; Vagati, A.; Guglielmi, P.; Boazzo, B. Performance Comparison Between Surface-Mounted and Interior PM Motor Drives for Electric Vehicle Application. IEEE Trans. Ind. Electron. 2012, 59, 803–811. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Trans. Transp. Electrif. 2015, 3, 245–254. [Google Scholar] [CrossRef]
- Lipo, T.A.; Du, Z.S. Synchronous motor drives-a forgotten option. In Proceedings of the 2015 Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Dai, J.; Hagen, S.D.; Ludois, C.; Brown, I.P. Synchronous Generator Brushless Field Excitation and Voltage Regulation via Capacitive Coupling Through Journal Bearings. IEEE Trans. Ind. Appl. 2017, 53, 3317–3326. [Google Scholar] [CrossRef]
- Bilgin, B.; Liang, J.; Terzic, M.V.; Dong, J.; Rodriguez, R.; Trickett, E.; Emadi, A. Modeling and Analysis of Electric Motors: State-of-the-Art Review. IEEE Trans. Transp. Electrif. 2019, 5, 602–617. [Google Scholar] [CrossRef] [Green Version]
- Yao, F.; Sun, D.; Sun, L.; Lipo, T.A. Dual Third-Harmonic-Current Excitation Principle of a Brushless Synchronous Machine Based on Double Three-Phase Armature Windings. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Ali, Q.; Lipo, T.A.; Kwon, B.-I. Design and Analysis of a Novel Brushless Wound Rotor Synchronous Machine. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Ali, Q.; Atiq, S.; Lipo, T.A.; Kwon, B. PM Assisted, Brushless Wound Rotor Synchronous Machine. J. Magn. 2016, 21, 399–404. [Google Scholar] [CrossRef] [Green Version]
- Hussain, A.; Kwon, B. A new brushless wound rotor synchronous machine using a special stator winding arrangement. Electr. Eng. 2018, 100, 1797–1804. [Google Scholar] [CrossRef]
- Hussain, A.; Atiq, S.; Kwon, B. Optimal Design and Experimental Verification of Wound Rotor Synchronous Machine Using Subharmonic Excitation for Brushless Operation. Energies 2018, 11, 554. [Google Scholar] [CrossRef] [Green Version]
- Sirewal, G.J.; Bukhari, S.S.H. Cost-Effective Scheme for a Brushless Wound Rotor Synchronous Machine. World Electr. Veh. J. 2021, 12, 194. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Ali, Q.; Doval-Gandoy, J.; Ro, J.-S. High-Efficient Brushless Wound Rotor Synchronous Machine Topology Based on Sub-Harmonic Field-Excitation Technique. Energies 2021, 14, 4427. [Google Scholar] [CrossRef]
- Rafin, S.M.H.; Lipo, T.A.; Kwon, B. A novel topology for a voltage source inverter with reduced transistor count and utilizing naturally commutated thyristors with simple commutation. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 643–648. [Google Scholar] [CrossRef]
- Rafin, S.M.H.; Lipo, T.A.; Kwon, B. Performance analysis of the three transistor voltage source inverter using different PWM techniques. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 1428–1433. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Rated power | W | 1281 |
| Operating speed | rpm | 900 |
| Stator outer diameter | mm | 177 |
| Stator inner diameter | mm | 95 |
| Air-gap length | mm | 0.5 |
| Shaft diameter | mm | 25 |
| Stack length | mm | 80 |
| Number of poles of stator ABC winding | - | 8 |
| Number of poles of stator XYZ winding | - | 2 |
| Number of poles of rotor harmonic winding | - | 2 |
| Number of poles of rotor field winding | - | 8 |
| Number of stator slots | - | 48 |
| Conductors per stator slot in ABC winding | - | 30 |
| Conductors per stator slot in XYZ winding | - | 10 |
| Conductors per pole of harmonic winding | - | 50 |
| Conductors per pole of field winding | - | 24 |
| Indicator | Unit | WRSM [14] | BL-WRSM [15] | Novel SHSM |
|---|---|---|---|---|
| Stator current | Arms | 4.50 | 4.50 | 4.50 |
| Filed current | Aavg | 9.5 | 9.8 | 20.18 |
| Harmonic current | Arms | 0 | 5.1 | 14.05 |
| Terminal voltage | Vrms | 68.10 | 72.0 | 113.89 |
| Average torque | Nm | 7.30 | 7.83 | 12.53 |
| Torque ripple | % | 16.67 | 18.0 | 32 |
| Number of layers of stator winding | 2 | 2 | 3 | |
| Number of poles for rotor harmonic winding | - | 4 | 2 | |
| Number of ABC conductors/slot of stator winding | 40 | 40 | 30 | |
| Number of XYZ conductors/slot of stator winding | - | 20 | 10 |
| Indicator | Unit | Number of Conductors per Slot in XYZ Winding While Having 30 Conductors per Slot in ABC Winding | ||||
|---|---|---|---|---|---|---|
| 10 | 8 | 6 | 4 | 2 | ||
| Stator current | Arms | 4.50 | 4.50 | 4.50 | 4.50 | 4.50 |
| Field current | Aavg | 20.18 | 15.74 | 10.81 | 6.09 | 1.78 |
| Harmonic current | Arms | 14.05 | 11.28 | 8.27 | 5.07 | 1.81 |
| Terminal voltage | Vrms | 113.89 | 102.46 | 87.64 | 68.48 | 50.86 |
| Induced field voltage | Vrms | 6.11 | 5.67 | 5.01 | 4.02 | 2.73 |
| Rotor voltage | Vavg | 1.57 | 1.38 | 1.09 | 0.69 | 0.22 |
| Average torque | Nm | 12.53 | 11.15 | 9.10 | 6.04 | 2.02 |
| Torque ripple | % | 32 | 31 | 31 | 33 | 38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rafin, S.M.S.H.; Ali, Q.; Lipo, T.A. A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology. World Electr. Veh. J. 2022, 13, 16. https://doi.org/10.3390/wevj13010016
Rafin SMSH, Ali Q, Lipo TA. A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology. World Electric Vehicle Journal. 2022; 13(1):16. https://doi.org/10.3390/wevj13010016
Chicago/Turabian StyleRafin, S M Sajjad Hossain, Qasim Ali, and Thomas A. Lipo. 2022. "A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology" World Electric Vehicle Journal 13, no. 1: 16. https://doi.org/10.3390/wevj13010016
APA StyleRafin, S. M. S. H., Ali, Q., & Lipo, T. A. (2022). A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology. World Electric Vehicle Journal, 13(1), 16. https://doi.org/10.3390/wevj13010016