

Driver Identification Methods in Electric Vehicles, a Review



Abstract
:1. Introduction
- (i)
- Elaboration on the recent research on driver recognition model, presenting conclusions on the state of the art in driver study field and a potential solution to help researchers develop models with higher performance.
- (ii)
- Understanding the characteristics of the data sources for driver recognition, providing reference for further research on data collection, help researchers to find more reasonable data for training driver recognition model.
- (iii)
- Serving as a guide for future research on driver identification methods, addressing the ambiguities in the driver recognition, and providing valuable information on technical trends to promote the development of electric vehicles.
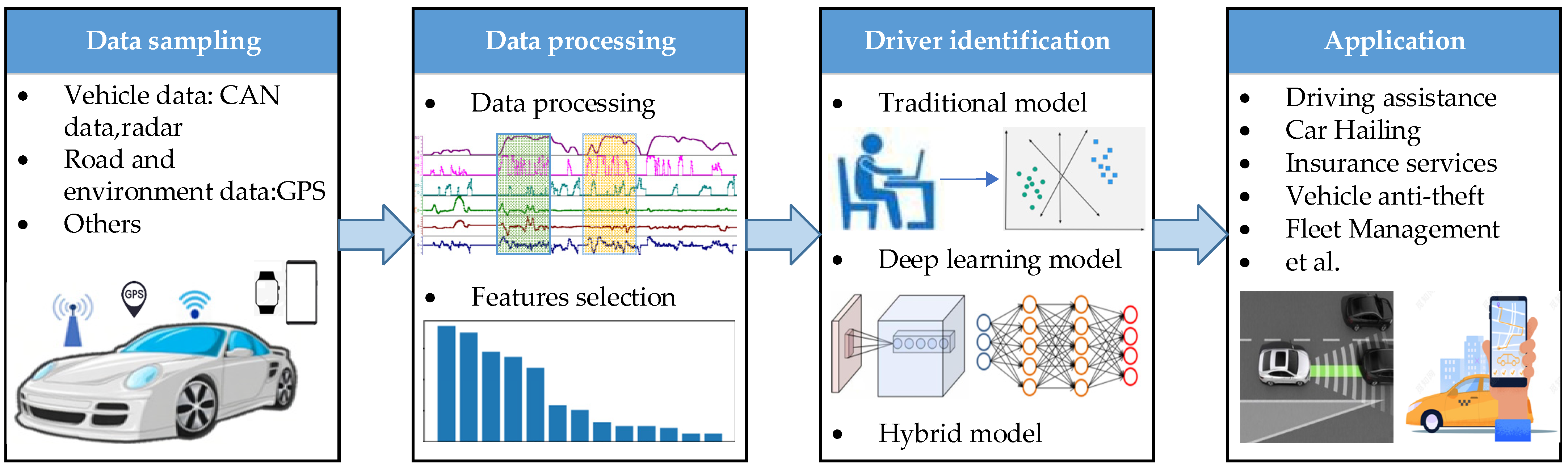
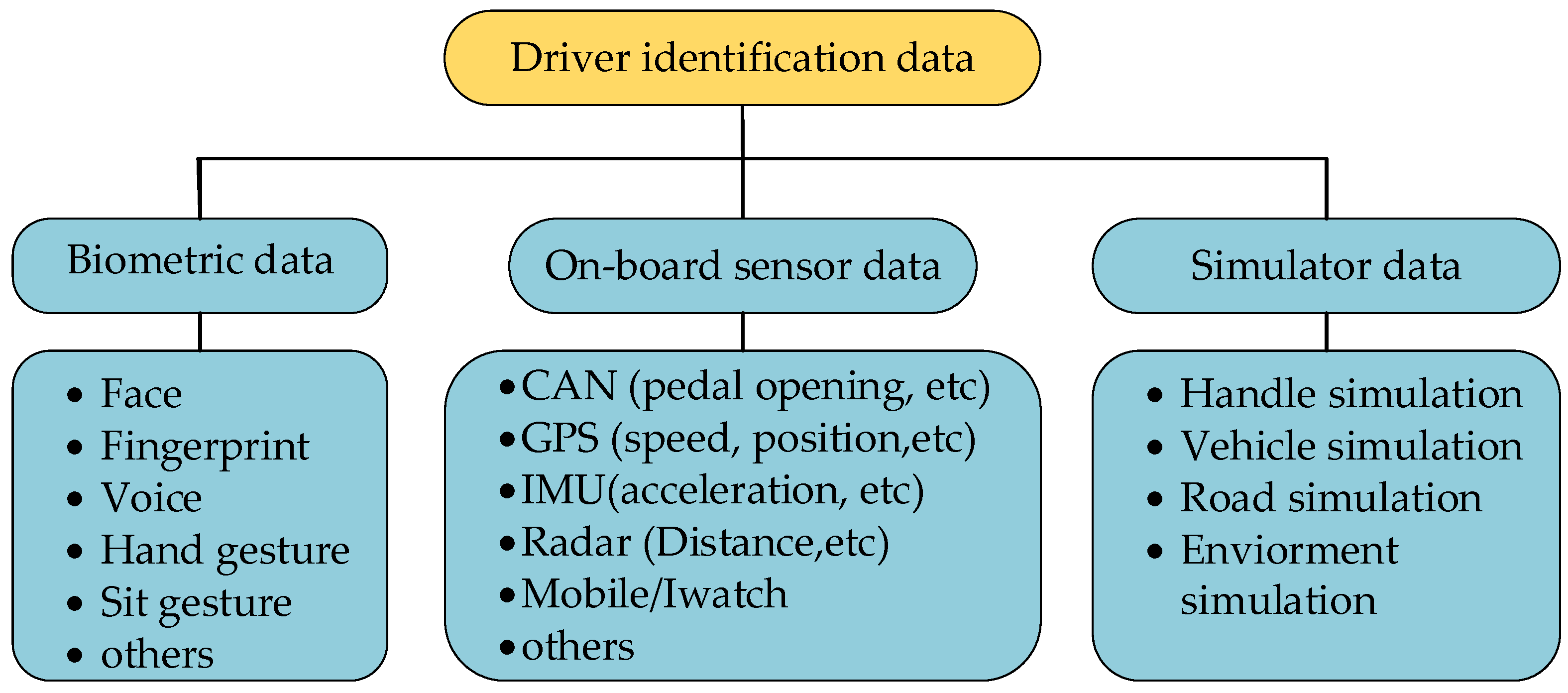
2. Data for Driver Identification
2.1. Biometric Data
2.2. Driving Simulator Data
2.3. On-Board Sensor Data
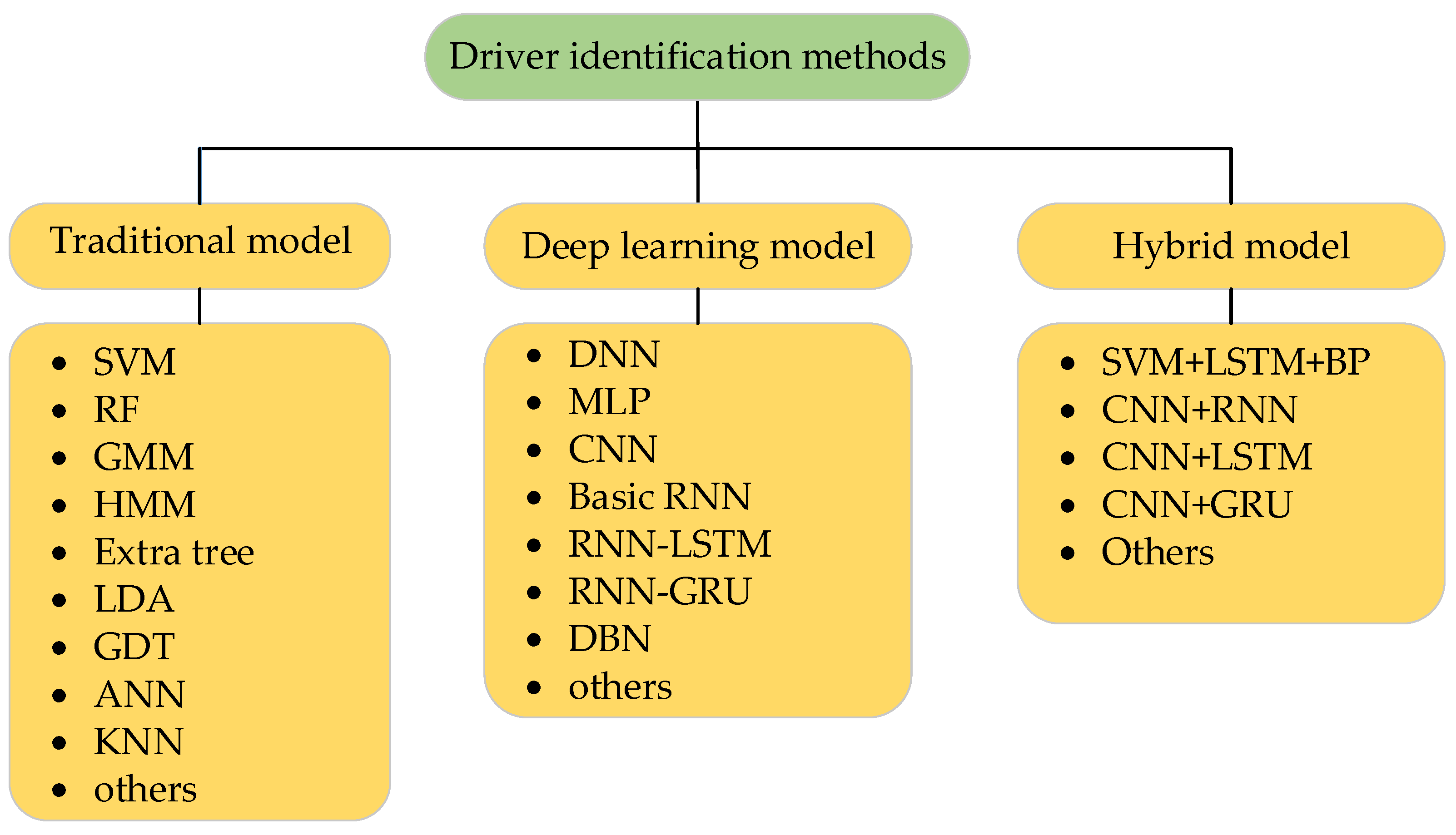
3. Driver Identification Models
3.1. Traditional Model
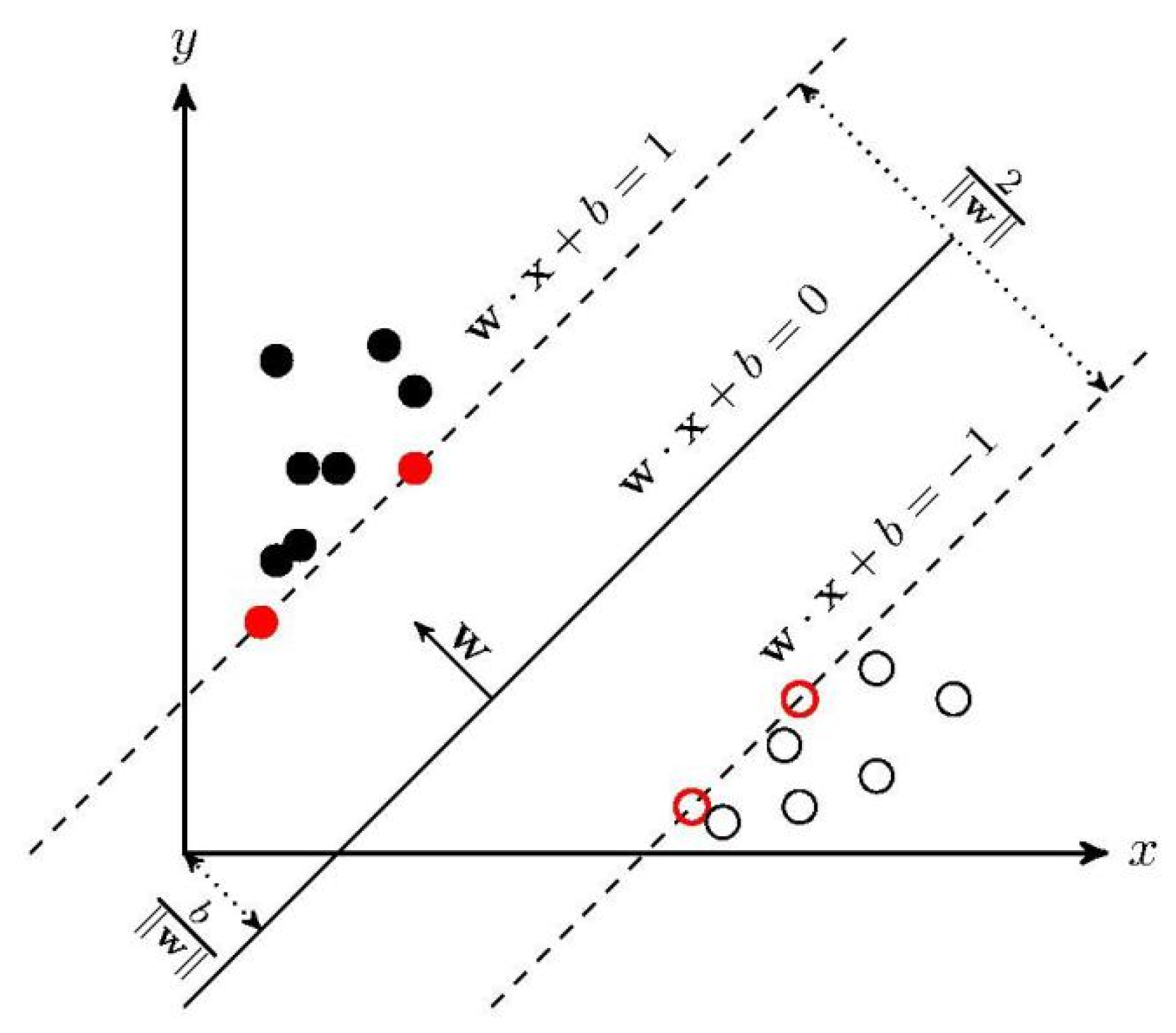
3.1.1. SVM Model
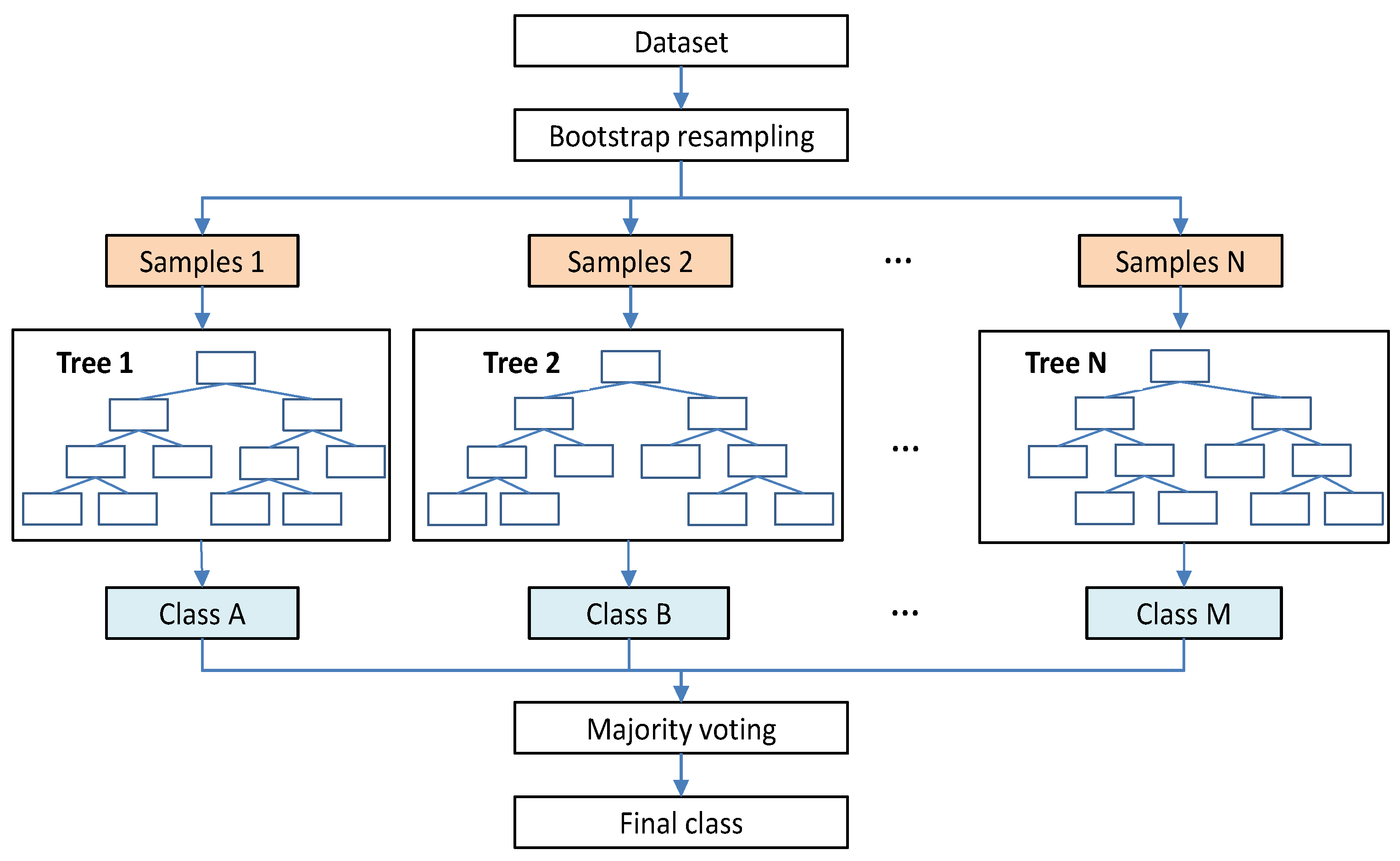
3.1.2. RF Model
3.2. Deep Learning Model
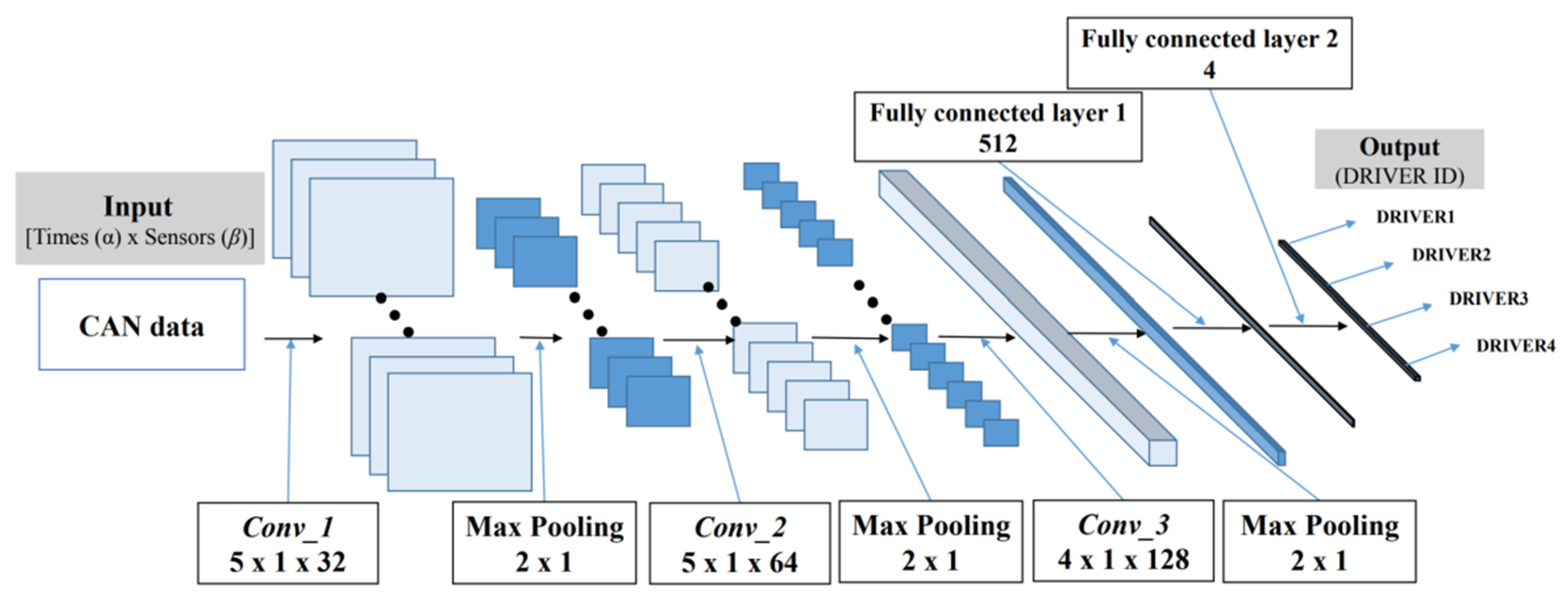
3.2.1. CNN Model

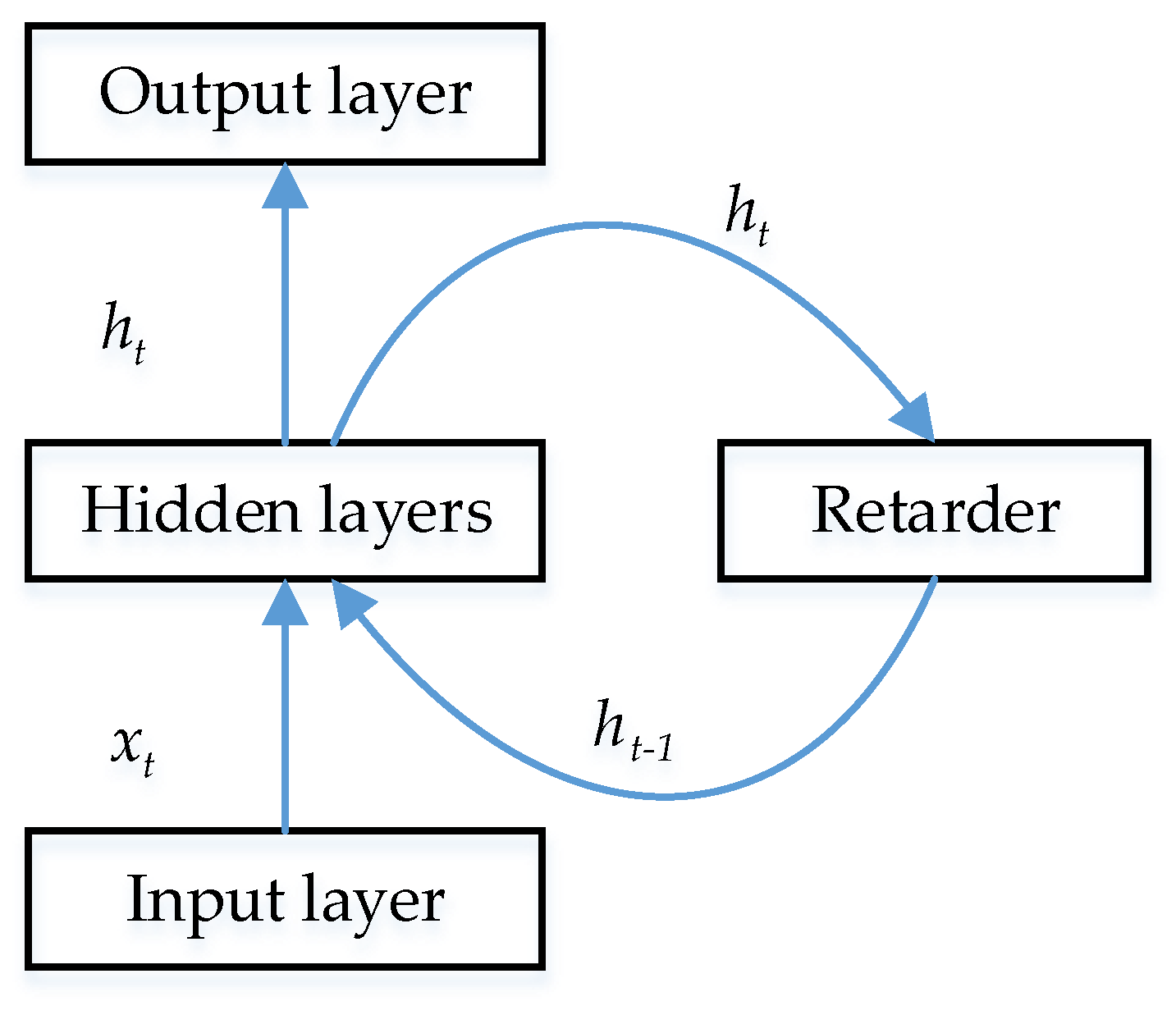
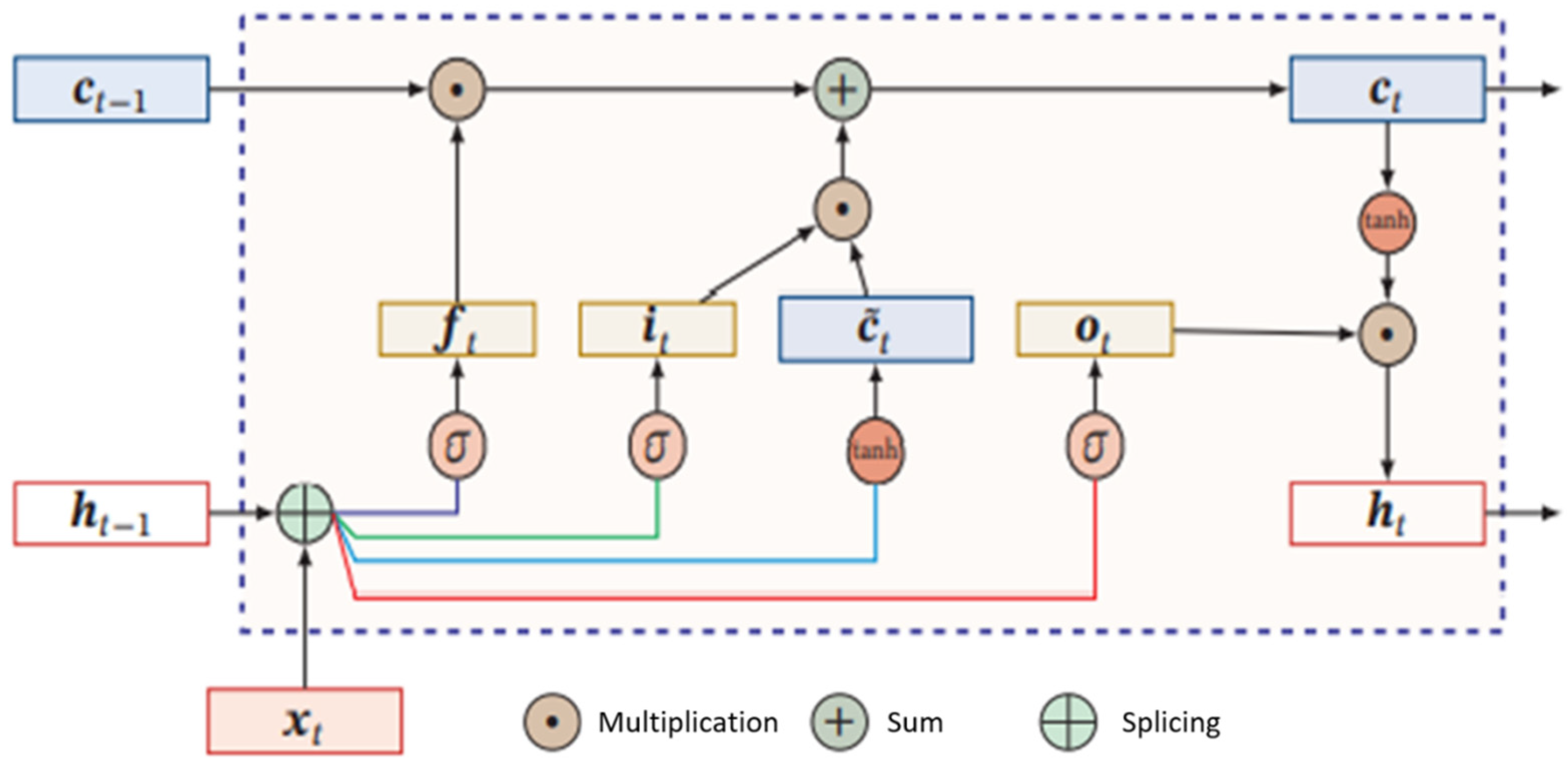
3.2.2. RNN Model
3.3. Hybrid Model
4. Summaries and Prospects
Funding
Conflicts of Interest
References
- Narasipuram, R.P.; Mopidevi, S. A technological overview & design considerations for developing electric vehicle charging stations. J. Energy Storage 2021, 43, 103225. [Google Scholar] [CrossRef]
- Mopidevi, S.; Narasipuram, R.P.; Aemalla, S.R.; Rajan, H. E-mobility: Impacts and analysis of future transportation electrification market in economic, renewable energy and infrastructure perspective. Int. J. Powertrains 2022, 11, 264–284. [Google Scholar] [CrossRef]
- Rundo, F.; Trenta, F.; Leotta, R.; Spampinato, C.; Piuri, V.; Conoci, S.; Labati, R.D.; Scotti, F.; Battiato, S. Advanced Temporal Dilated Convolutional Neural Network for a Robust Car Driver Identification. In International Conference on Pattern Recognition; Springer: Cham, Switzerland, 2021; pp. 184–199. [Google Scholar]
- Klusek, A.; Kurdziel, M.; Paciorek, M.; Wawryka, P.; Turek, W. Driver profiling by using LSTM networks with Kalman filtering. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1983–1988. [Google Scholar]
- Azadani, M.N.; Boukerche, A. Convolutional and Recurrent Neural Networks for Driver Identification: An Empirical Study. In Proceedings of the NOMS 2022-2022 IEEE/IFIP Network Operations and Management Symposium. IEEE, Budapest, Hungary, 25–29 April 2022; p. 21781205. [Google Scholar]
- Abu-Gellban, H.; Nguyen, L.; Moghadasi, M.; Pan, Z.; Jin, F. Livedi: An anti-theft model based on driving behavior. In Proceedings of the 2020 ACM Workshop on Information Hiding and Multimedia Security, Denver, CO, USA, 22–24 June 2020; pp. 67–72. [Google Scholar]
- Guan, L.; Xu, J.; Wang, S.; Xing, X.; Lin, L.; Huang, H.; .Liu, P.; Lee, W. From physical to cyber: Escalating protection for personalized auto insurance. In Proceedings of the 14th ACM Conference on Embedded Network Sensor Systems CD-ROM, Stanford, CA, USA, 14–16 November 2016; pp. 42–55. [Google Scholar]
- El Mekki, A.; Bouhoute, A.; Berrada, I. Improving Driver Identification for the Next-Generation of In-Vehicle Software Systems. IEEE Trans. Veh. Technol. 2019, 68, 7406–7415. [Google Scholar] [CrossRef]
- Azadani, M.N.; Boukerche, A. Driving Behavior Analysis Guidelines for Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6027–6045. [Google Scholar] [CrossRef]
- Choi, S.; Kim, J.; Kwak, D.; Angkititrakul, P.; Hansen, J.H. Analysis and Classification of Driver Behavior Using in-Vehicle Can-Bus Information. Available online: https://www.semanticscholar.org/paper/Analysis-and-Classification-of-Driver-Behavior-Choi-Kim/f54fb0d1d3582ac5b533fa228f46fb4246a2c69b (accessed on 13 October 2022).
- Miyajima, C.; Nishiwaki, Y.; Ozawa, K.; Wakita, T.; Itou, K.; Takeda, K.; Itakura, F. Driver Modeling Based on Driving Behavior and Its Evaluation in Driver Identification. Proc. IEEE 2007, 95, 427–437. [Google Scholar] [CrossRef]
- Qian, H.; Ou, Y.; Wu, X.; Meng, X.; Xu, Y. Support Vector Machine for Behavior-Based Driver Identification System. J. Robot. 2010, 2010, 397865. [Google Scholar] [CrossRef]
- Ezzini, S.; Berrada, I.; Ghogho, M. Who is behind the wheel? Driver identification and fingerprinting. J. Big Data 2018, 5, 9. [Google Scholar] [CrossRef] [Green Version]
- Shojaeilangari, S.; Yau, W.-Y.; Nandakumar, K.; Li, J.; Teoh, E.K. Robust Representation and Recognition of Facial Emotions Using Extreme Sparse Learning. IEEE Trans. Image Process. 2015, 24, 2140–2152. [Google Scholar] [CrossRef]
- Kim, K.-M.; Choi, J.-I. Passengers’ gesture recognition model in self-driving vehicles: Gesture recognition model of the passengers’ obstruction of the vision of the driver. In Proceedings of the 2019 IEEE 4th International Conference on Computer and Communication Systems (ICCCS), Singapore, 23–25 February 2019; pp. 239–242. [Google Scholar]
- Engelbrecht, J.; Booysen, M.J.; van Rooyen, G.-J.; Bruwer, F.J. Survey of smartphone-based sensing in vehicles for intelligent transportation system applications. IET Intell. Transp. Syst. 2015, 9, 924–935. [Google Scholar] [CrossRef] [Green Version]
- Song, T.; Cheng, X.; Li, H.; Yu, J.; Wang, S.; Bie, R. Detecting driver phone calls in a moving vehicle based on voice features. In Proceedings of the IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- He, J.; Chen, J.; Liu, J.; Li, H. A lightweight architecture for driver status monitoring via convolutional neural networks. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 388–394. [Google Scholar]
- Xing, Y.; Lv, C.; Zhang, Z.; Wang, H.; Na, X.; Cao, D.; Velenis, E.; Wang, F.-Y. Identification and Analysis of Driver Postures for In-Vehicle Driving Activities and Secondary Tasks Recognition. IEEE Trans. Comput. Soc. Syst. 2017, 5, 95–108. [Google Scholar] [CrossRef]
- Chen, R.; She, M.F.; Sun, X.; Kong, L.; Wu, Y. Driver recognition based on dynamic handgrip pattern on steeling wheel. In Proceedings of the 2011 12th ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing, Sydney, NSW, Australia, 6–8 July 2011; pp. 107–112. [Google Scholar]
- Rahim, M.A.; Zhu, L.; Li, X.; Liu, J.; Zhang, Z.; Qin, Z.; Khan, S.; Gai, K. Zero-to-Stable Driver Identification: A Non-Intrusive and Scalable Driver Identification Scheme. IEEE Trans. Veh. Technol. 2019, 69, 163–171. [Google Scholar] [CrossRef]
- Woo, H.; Ji, Y.; Tamura, Y.; Kuroda, Y.; Sugano, T.; Yamamoto, Y.; Yamashita, A.; Asama, H. Driver classification in vehicle following behavior by using dynamic potential field method. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Mihály, A.; Gáspár, P. Identification of a linear driver model based on simulator experiments. In Proceedings of the 2014 IEEE 9th IEEE International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 15–17 May 2014; pp. 13–18. [Google Scholar]
- Li, Z.; Wang, H.; Zhang, Y.; Zhao, X. Random forest–based feature selection and detection method for drunk driving recognition. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720905234. [Google Scholar] [CrossRef] [Green Version]
- Van Ly, M.; Martin, S.; Trivedi, M.M. Driver classification and driving style recognition using inertial sensors. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013; pp. 1040–1045. [Google Scholar]
- Xun, Y.; Liu, J.; Kato, N.; Fang, Y.; Zhang, Y. Automobile Driver Fingerprinting: A New Machine Learning Based Authentication Scheme. IEEE Trans. Ind. Informatics 2020, 16, 1417–1426. [Google Scholar] [CrossRef]
- Azadani, M.N.; Boukerche, A. Siamese Temporal Convolutional Networks for Driver Identification Using Driver Steering Behavior Analysis. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18076–18087. [Google Scholar] [CrossRef]
- Hallac, D.; Sharang, A.; Stahlmann, R.; Lamprecht, A.; Huber, M.; Roehder, M.; Leskovec, J. Driver identification using automobile sensor data from a single turn. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 953–958. [Google Scholar]
- Zhang, J.; Wu, Z.; Li, F.; Xie, C.; Ren, T.; Chen, J.; Liu, L. A Deep Learning Framework for Driving Behavior Identification on In-Vehicle CAN-BUS Sensor Data. Sensors 2019, 19, 1356. [Google Scholar] [CrossRef] [Green Version]
- Remeli, M.; Lestyán, S.; Acs, G.; Biczók, G. Automatic driver identification from in-vehicle network logs. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1150–1157. [Google Scholar]
- Abdennour, N.; Ouni, T.; Ben Amor, N. Driver identification using only the CAN-Bus vehicle data through an RCN deep learning approach. Robot. Auton. Syst. 2021, 136, 103707. [Google Scholar] [CrossRef]
- Banerjee, T.; Chowdhury, A.; Chakravarty, T.; Ghose, A. Driver authentication by quantifying driving style using GPS only. In Proceedings of the 2020 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Austin, TX, USA, 23–27 March 2020; pp. 1–6. [Google Scholar]
- Chowdhury, A.; Chakravarty, T.; Ghose, A.; Banerjee, T.; Balamuralidhar, P. Investigations on Driver Unique Identification from Smartphone’s GPS Data Alone. J. Adv. Transp. 2018, 2018, 9702730. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Wu, J.; Long, C.; Lin, Y.-B. MobiDIV: A Privacy-Aware Real-Time Driver Identity Verification on Mobile Phone. IEEE Internet Things J. 2021, 9, 2802–2816. [Google Scholar] [CrossRef]
- Hernández Sánchez, S.; Fernández Pozo, R.; Hernández Gómez, L.A. Deep neural networks for driver identification using accelerometer signals from smartphones. In International Conference on Business Information Systems; Springer: Cham, Switzerland, 2019; pp. 206–220. [Google Scholar]
- Ahmad, B.I.; Langdon, P.M.; Liang, J.; Godsill, S.J.; Delgado, M.; Popham, T. Driver and Passenger Identification from Smartphone Data. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1278–1288. [Google Scholar] [CrossRef] [Green Version]
- Putri, R.R.M.; Yang, C.-H.; Chang, C.-C.; Liang, D. Smartwatch-Based Open-Set Driver Identification by Using GMM-Based Behavior Modeling Approach. IEEE Sensors J. 2020, 21, 4918–4926. [Google Scholar] [CrossRef]
- Öztürk, E.; Erzin, E. Driver status identification from driving behavior signals. In Digital Signal Processing for In-Vehicle Systems and Safety; Springer: New York, NY, USA, 2012; pp. 31–55. [Google Scholar]
- Nishiwaki, Y.; Ozawa, K.; Wakita, T.; Miyajima, C.; Itou, K.; Takeda, K. Driver identification based on spectral analysis of driving behavioral signals. In Advances for In-Vehicle and Mobile Systems; Springer: Boston, MA, USA, 2007; pp. 25–34. [Google Scholar]
- Zhang, X.; Zhao, X.; Rong, J. A study of individual characteristics of driving behavior based on hidden Markov model. Sens. Trans. 2014, 167, 194. [Google Scholar]
- Meng, X.; Lee, K.K.; Xu, Y. Human driving behavior recognition based on hidden markov models. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; pp. 274–279. [Google Scholar]
- Rettore, P.H.L.; Campolina, A.B.; Souza, A.; Maia, G.; Villas, L.A.; Loureiro, A.A.F. Driver authentication in VANETs based on intra-vehicular sensor data. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 78–83. [Google Scholar]
- Fung, N.C.; Wallace, B.; Chan, A.D.; Goubran, R.; Porter, M.M.; Marshall, S.; Knoefel, F. Driver identification using vehicle acceleration and deceleration events from naturalistic driving of older drivers. In Proceedings of the 2017 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Rochester, MN, USA, 7–10 May 2017; pp. 33–38. [Google Scholar]
- Tahmasbi, F.; Wang, Y.; Chen, Y.; Gruteser, M. Your phone tells us the truth: Driver identification using smartphone on one turn. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking, New Delhi, India, 29 October–1 November 2018; pp. 762–764. [Google Scholar]
- Yang, J.; Zhao, R.; Zhu, M.; Hallac, D.; Sodnik, J.; Leskovec, J. Driver2vec: Driver identification from automotive data. arXiv 2021, arXiv:2102.05234. [Google Scholar]
- del Campo, I.; Finker, R.; Martinez, M.V.; Echanobe, J.; Doctor, F. A real-time driver identification system based on artificial neural networks and cepstral analysis. In Proceedings of the 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 1848–1855. [Google Scholar]
- Martínez, M.V.; Echanobe, J.; del Campo, I. Driver identification and impostor detection based on driving behavior signals. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 372–378. [Google Scholar]
- Virojboonkiate, N.; Chanakitkarnchok, A.; Vateekul, P.; Rojviboonchai, K. Public Transport Driver Identification System Using Histogram of Acceleration Data. J. Adv. Transp. 2019, 2019, 6372597. [Google Scholar] [CrossRef] [Green Version]
- Junli, C.; Licheng, J. Classification mechanism of support vector machines. In Proceedings of the WCC 2000-ICSP 2000, 2000 5th International Conference on Signal Processing Proceedings, 16th World Computer Congress 2000, Beijing, China, 21–25 August 2000; Volume 3, pp. 1556–1559. [Google Scholar]
- Burton, A.; Parikh, T.; Mascarenhas, S.; Zhang, J.; Voris, J.; Artan, N.S.; Li, W. Driver identification and authentication with active behavior modeling. In Proceedings of the 2016 12th International Conference on Network and Service Management (CNSM), Montreal, QC, Canada, 19 January 2017; pp. 388–393. [Google Scholar]
- Marchegiani, L.; Posner, I. Long-term driving behaviour modelling for driver identification. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 913–919. [Google Scholar]
- Azadani, M.N.; Boukerche, A. Driver identification using vehicular sensing data: A deep learning approach. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Kwak, B.I.; Han, M.L.; Kim, H.K. Driver Identification Based on Wavelet Transform Using Driving Patterns. IEEE Trans. Ind. Inform. 2020, 17, 2400–2410. [Google Scholar] [CrossRef]
- Haddouchi, M.; Berrado, A. A survey of methods and tools used for interpreting random forest. In Proceedings of the 2019 1st International Conference on Smart Systems and Data Science (ICSSD), Rabat, Morocco, 3–4 October 2019; pp. 1–6. [Google Scholar]
- Wang, B.; Panigrahi, S.; Narsude, M.; Mohanty, A. Driver Identification Using Vehicle Telematics Data (No. 2017-01-1372); SAE International. Available online: https://saemobilus.sae.org/content/2017-01-1372/ (accessed on 13 October 2022).
- Luo, D.; Lu, J.; Guo, G. Driver Identification Using Multivariate In-Vehicle Time Series Data (No. 2018-01-1198); SAE Technical Paper. Available online: https://saemobilus.sae.org/content/2018-01-1198/ (accessed on 13 October 2022).
- Enev, M.; Takakuwa, A.; Koscher, K.; Kohno, T. Automobile Driver Fingerprinting. Proc. Priv. Enhanc. Technol. 2016, 2016, 34–50. [Google Scholar] [CrossRef] [Green Version]
- Lestyán, S.; Acs, G.; Biczók, G.; Szalay, Z. Extracting vehicle sensor signals from CAN logs for driver re-identification. arXiv 2019, arXiv:1902.08956. [Google Scholar]
- Tanaka, D.; Baba, Y.; Kashima, H.; Okubo, Y. Large-scale driver identification using automobile driving data. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 3441–3446. [Google Scholar]
- Kwak, B.I.; Woo, J.; Kim, H.K. Know your master: Driver profiling-based anti-theft method. In Proceedings of the 14th Annual Conference on Privacy, Security and Trust (PST), Auckland, New Zealand, 12–14 December 2016; pp. 211–218. [Google Scholar]
- Jafarnejad, S.; Castignani, G.; Engel, T. Towards a real-time driver identification mechanism based on driving sensing data. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Azadani, M.N.; Boukerche, A. Performance evaluation of driving behavior identification models through can-bus data. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Bernardi, M.L.; Cimitile, M.; Martinelli, F.; Mercaldo, F. Driver identification: A time series classification approach. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–7. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Jeong, D.; Kim, M.; Kim, K.; Kim, T.; Jin, J.; Lee, C.; Lim, S. Real-time driver identification using vehicular big data and deep learning. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 123–130. [Google Scholar]
- Chen, J.; Wu, Z.; Zhang, J. Driver identification based on hidden feature extraction by using adaptive nonnegativity-constrained autoencoder. Appl. Soft Comput. 2019, 74, 1–9. [Google Scholar] [CrossRef]
- Cai, H.; Hu, Z.; Chen, Z.; Zhu, D. A Driving Fingerprint Map Method of Driving Characteristic Representation for Driver Identification. IEEE Access 2018, 6, 71012–71019. [Google Scholar] [CrossRef]
- Choi, G.; Lim, K.; Pan, S.B. Driver Identification System using 2D ECG and EMG based on Multi-stream CNN for Intelligent Vehicle. IEEE Sens. Lett. 2022, 6, 1–4. [Google Scholar] [CrossRef]
- Hu, H.; Liu, J.; Gao, F.; Gao, Z.; Mei, X.; Yang, G. Driver Identification Based on 1-D Convolutional Neural Networks. China J. Highw. Transp. 2020, 33, 195. [Google Scholar]
- Al-Hussein, W.A.; Por, L.Y.; Kiah, M.L.M.; Zaidan, B.B. Driver Behavior Profiling and Recognition Using Deep-Learning Methods: In Accordance with Traffic Regulations and Experts Guidelines. Int. J. Environ. Res. Public Health 2022, 19, 1470. [Google Scholar] [CrossRef]
- Aslan, C.; Genc, Y. Driver Identification Using Vehicle Diagnostic Data with Fully Convolutional Neural Network. In Proceedings of the 2021 29th Signal Processing and Communications Applications Conference (SIU), Istanbul, Turkey, 9–11 June 2021; pp. 1–4. [Google Scholar]
- Wang, S.; Zhao, J.; Shao, C.; Dong, C.D.; Yin, C. Truck Traffic Flow Prediction Based on LSTM and GRU Methods With Sampled GPS Data. IEEE Access 2020, 8, 208158–208169. [Google Scholar] [CrossRef]
- Rundo, F. Deep LSTM with Dynamic Time Warping Processing Framework: A Novel Advanced Algorithm with Biosensor System for an Efficient Car-Driver Recognition. Electronics 2020, 9, 616. [Google Scholar] [CrossRef]
- Ravi, C.; Tigga, A.; Reddy, G.T.; Hakak, S.; Alazab, M. Driver Identification Using Optimized Deep Learning Model in Smart Transportation. ACM Trans. Internet Technol. 2020, 7. [Google Scholar] [CrossRef]
- Khairdoost, N.; Shirpour, M.; Bauer, M.A.; Beauchemin, S.S. Real-Time Driver Maneuver Prediction Using LSTM. IEEE Trans. Intell. Veh. 2020, 5, 714–724. [Google Scholar] [CrossRef]
- Girma, A.; Yan, X.; Homaifar, A. Driver identification based on vehicle telematics data using LSTM-recurrent neural network. In Proceedings of the 2019 IEEE 31st International Conference on Tools with Artificial Intelligence (ICTAI), Portland, OR, USA, 4–6 November 2019; pp. 894–902. [Google Scholar]
- Choi, G.H.; Lim, K.; Pan, S.B. Driver Identification System Using Normalized Electrocardiogram Based on Adaptive Threshold Filter for Intelligent Vehicles. Sensors 2020, 21, 202. [Google Scholar] [CrossRef]
- Dang, H.; Furnkranz, J. Driver information embedding with siamese LSTM networks. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 935–940. [Google Scholar]
- Hema, D.D.; Kumar, K.A. Hyperparameter optimization of LSTM based Driver’s Aggressive Behavior Prediction Model. In Proceedings of the 2021 International Conference on Artificial Intelligence and Smart Systems (ICAIS), Coimbatore, India, 25–27 March 2021; pp. 752–757. [Google Scholar]
- Cura, A.; Kucuk, H.; Ergen, E.; Oksuzoglu, I.B. Driver Profiling Using Long Short Term Memory (LSTM) and Convolutional Neural Network (CNN) Methods. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6572–6582. [Google Scholar] [CrossRef]
- Du, G.; Li, T.; Li, C.; Liu, P.X.; Li, D. Vision-Based Fatigue Driving Recognition Method Integrating Heart Rate and Facial Features. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3089–3100. [Google Scholar] [CrossRef]
- Saleh, K.; Hossny, M.; Nahavandi, S. Driving behavior classification based on sensor data fusion using LSTM recurrent neural networks. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Würtz, S.; Göhner, U. Driving Style Analysis Using Recurrent Neural Networks with LSTM Cells. J. Adv. Inf. Technol. 2020, 11, 1–9. [Google Scholar] [CrossRef]
- Kadri, N.; Ellouze, A.; Ksantini, M.; Turki, S.H. New LSTM Deep Learning Algorithm for Driving Behavior Classification. Cybern. Syst. 2022, 4, 1–19. [Google Scholar] [CrossRef]
- Wijnands, J.S.; Thompson, J.; Aschwanden, G.D.; Stevenson, M. Identifying behavioural change among drivers using Long Short-Term Memory recurrent neural networks. Transp. Res. Part F Traffic Psychol. Behav. 2018, 53, 34–49. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Q.; He, Y.; Williams, H.; Xu, H. Driver-Identified Supervisory Control System of Hybrid Electric Vehicles Based on Spectrum-Guided Fuzzy Feature Extraction. IEEE Trans. Fuzzy Syst. 2020, 28, 2691–2701. [Google Scholar] [CrossRef]
- Li, J.; Zhao, K.; Tang, Y.; Luo, X.; Ma, X. Inaccurate Prediction Is Not Always Bad: Open-World Driver Recognition via Error Analysis. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–7. [Google Scholar]
- Gahr, B.; Liu, S.; Koch, K.; Barata, F.; Dahlinger, A.; Ryder, B.; Fleisch, E.; Wortmann, F. Driver identification via the steering wheel. arXiv 2019, arXiv:1909.03953. [Google Scholar]
- Hallac, D.; Bhooshan, S.; Chen, M.; Abida, K.; Leskovec, J. Drive2vec: Multiscale state-space embedding of vehicular sensor data. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3233–3238. [Google Scholar]
- Srivastava, A.; Sangwan, K.S. Real-Time Driver Drowsiness Detection Using GRU with CNN Features. In International Conference on Computer Vision and Image Processing; Springer: Singapore, 2020; pp. 501–513. [Google Scholar]
- Carvalho, E.; Ferreira, B.V.; Ferreira, J.; De Souza, C.; Carvalho, H.V.; Suhara, Y.; Pentland, A.S.; Pessin, G. Exploiting the use of recurrent neural networks for driver behavior profiling. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 3016–3021. [Google Scholar]
- Talebloo, F.; Mohammed, E.A.; Far, B. Deep Learning Approach for Aggressive Driving Behaviour Detection. arXiv 2021, arXiv:2111.04794. [Google Scholar]
- Ping, P.; Ding, W.; Liu, Y.; Takeda, K. An enhanced driver’s risk perception modeling based on gate recurrent unit network. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 1234–1240. [Google Scholar]
- Dua, I.; Nambi, A.U.; Jawahar, C.V.; Padmanabhan, V. AutoRate: How attentive is the driver? In Proceedings of the 2019 14th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2019), Lille, France, 14–18 May 2019; pp. 1–8. [Google Scholar]
- Ullah, S.; Kim, D.-H. Lightweight Driver Behavior Identification Model with Sparse Learning on In-Vehicle CAN-BUS Sensor Data. Sensors 2020, 20, 5030. [Google Scholar] [CrossRef]
- Moosavi, S.; Mahajan, P.D.; Parthasarathy, S.; Saunders-Chukwu, C.; Ramnath, R. Driving Style Representation in Convolutional Recurrent Neural Network Model of Driver Identification. arXiv 2021, arXiv:2102.05843. [Google Scholar]
- Hammann, M.; Kraus, M.; Shafaei, S.; Knoll, A. Identity Recognition in Intelligent Cars with Behavioral Data and LSTM-ResNet Classifier. arXiv 2020, arXiv:2003.00770. [Google Scholar]
- Moreira-Matias, L.; Farah, H. On Developing a Driver Identification Methodology Using In-Vehicle Data Recorders. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2387–2396. [Google Scholar] [CrossRef]
- Jafarnejad, S.; Castignani, G.; Engel, T. Driver Identification Only Using GPS Trajectories: A Deep Learning Approach. 2019. Available online: https://sasan.jafarnejad.io/publication/driver-identification-gps-data/ (accessed on 13 October 2022).
- Sanchez, S.H.; Pozo, R.F.; Gomez, L.A.H. Driver Identification and Verification From Smartphone Accelerometers Using Deep Neural Networks. IEEE Trans. Intell. Transp. Syst. 2020, 23, 97–109. [Google Scholar] [CrossRef]
- Xun, Y.; Liu, J.; Shi, Z. Multitask Learning Assisted Driver Identity Authentication and Driving Behavior Evaluation. IEEE Trans. Ind. Informatics 2020, 17, 7093–7102. [Google Scholar] [CrossRef]
- Zeng, L.; Al-Rifai, M.; Chelaru, S.; Nolting, M.; Nejdl, W. On the importance of contextual information for building reliable automated driver identification systems. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8. [Google Scholar]
- Ahmadian, R.; Ghatee, M.; Wahlström, J. Discrete Wavelet Transform for Generative Adversarial Network to Identify Drivers Using Gyroscope and Accelerometer Sensors. IEEE Sens. J. 2022, 22, 6879–6886. [Google Scholar] [CrossRef]
- Park, K.H.; Kim, H.K. This car is mine!: Automobile theft countermeasure leveraging driver identification with generative adversarial networks. arXiv 2019, arXiv:1911.09870. [Google Scholar]
- Lu, L.; Xiong, S. Few-shot driver identification via meta-learning. Expert Syst. Appl. 2022, 203, 117299. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Biometric Data | Driving Simulator Data | On-Board Sensor Data |
|---|---|---|---|
| Strengths | Simple, directSpecial sensor, high accuracyEasy to implement | Convenient to manually set driving scenarios and obtain data of different working conditionsEasy to repeat the test | Objective and real driving sceneThe data are objective, accurate and hard to forgeGood real-time data and low costNo invasion of personal privacy |
| Weakness | Unable to identify continuously onlineBuilt in sensor increases hardware costThe device needs to be activated manuallyImage intrusion into personal privacy | Different from the actual working condition, and the data accuracy is not highHigh cost of test facilities | CAN bus protocol is confidential, and data acquisition requires authorizationLarge investment in establishing database |
| Model Type | Traditional Model [38,39,40,41,42,43,44,45,46,47,48,50,51,52,53,54,55,56,57,58,59] | Deep Learning Model | Hybrid Model [8,29,96,97,98,99,100,101] |
|---|---|---|---|
| Typical model | SVM [12,21,50,51,52,53] RF [28,55,56,57,58,59] | CNN [27,31,62,65,66,67,68,69,70,71] LSTM [73,74,75,76,77,78,79,80,81,82,83,84,85,86], GRU [87,88,89,90,91,92,93,94,95] | CNN + RNN |
| Characteristics | Can be used for all kinds of driver recognition, extract statistical features with expert experiences | Can be used for all kinds of driver recognition, automatically extract data features and time feature (LSTM) | Can be used for all kinds of driver recognition, using the advantages of different models |
| Accuracy | >70%, discrete distribution | >85% | >85% |
| Computation | Low | High | High |
| Efficiency | High | Middle | Low |
| Adaptability | Static model | Static and dynamic adaptive model | All models |
| Defects | Manually extract feature, poor feature consistency, unable to obtain time-series features | Sample data size is fixed, and the features have no clear meaning, unable to obtain time-series features (CNN) | The model is complex and requires high ability of researchers |
| Application | Suitable to pattern recognition classification, small sample data | Suitable to pattern recognition classification, large samples of fixed length | Suitable to pattern recognition classification, all kinds of data |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Hou, J.; Zhong, Y.; He, W.; Fu, Z.; Zhou, F. Driver Identification Methods in Electric Vehicles, a Review. World Electr. Veh. J. 2022, 13, 207. https://doi.org/10.3390/wevj13110207
Zhao D, Hou J, Zhong Y, He W, Fu Z, Zhou F. Driver Identification Methods in Electric Vehicles, a Review. World Electric Vehicle Journal. 2022; 13(11):207. https://doi.org/10.3390/wevj13110207
Chicago/Turabian StyleZhao, Dengfeng, Junjian Hou, Yudong Zhong, Wenbin He, Zhijun Fu, and Fang Zhou. 2022. "Driver Identification Methods in Electric Vehicles, a Review" World Electric Vehicle Journal 13, no. 11: 207. https://doi.org/10.3390/wevj13110207
APA StyleZhao, D., Hou, J., Zhong, Y., He, W., Fu, Z., & Zhou, F. (2022). Driver Identification Methods in Electric Vehicles, a Review. World Electric Vehicle Journal, 13(11), 207. https://doi.org/10.3390/wevj13110207