
Design of a Data Security Access Control Algorithm for the Electric Vehicle Internet of Vehicles Based on Blockchain Technology

Abstract
:1. Introduction
2. Blockchain Technology
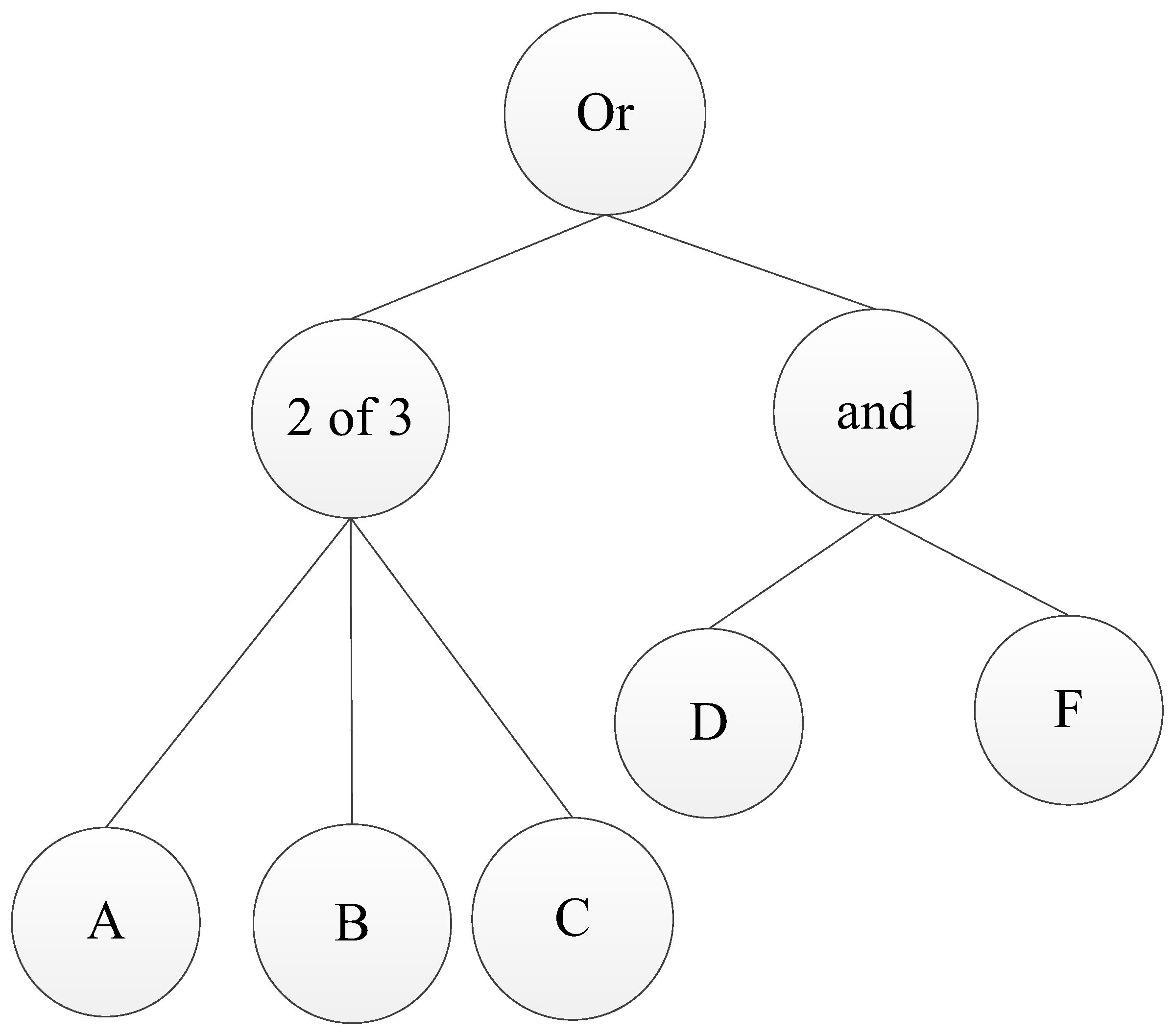
2.1. Design of Data Security Access Tree Structure of Internet of Vehicles
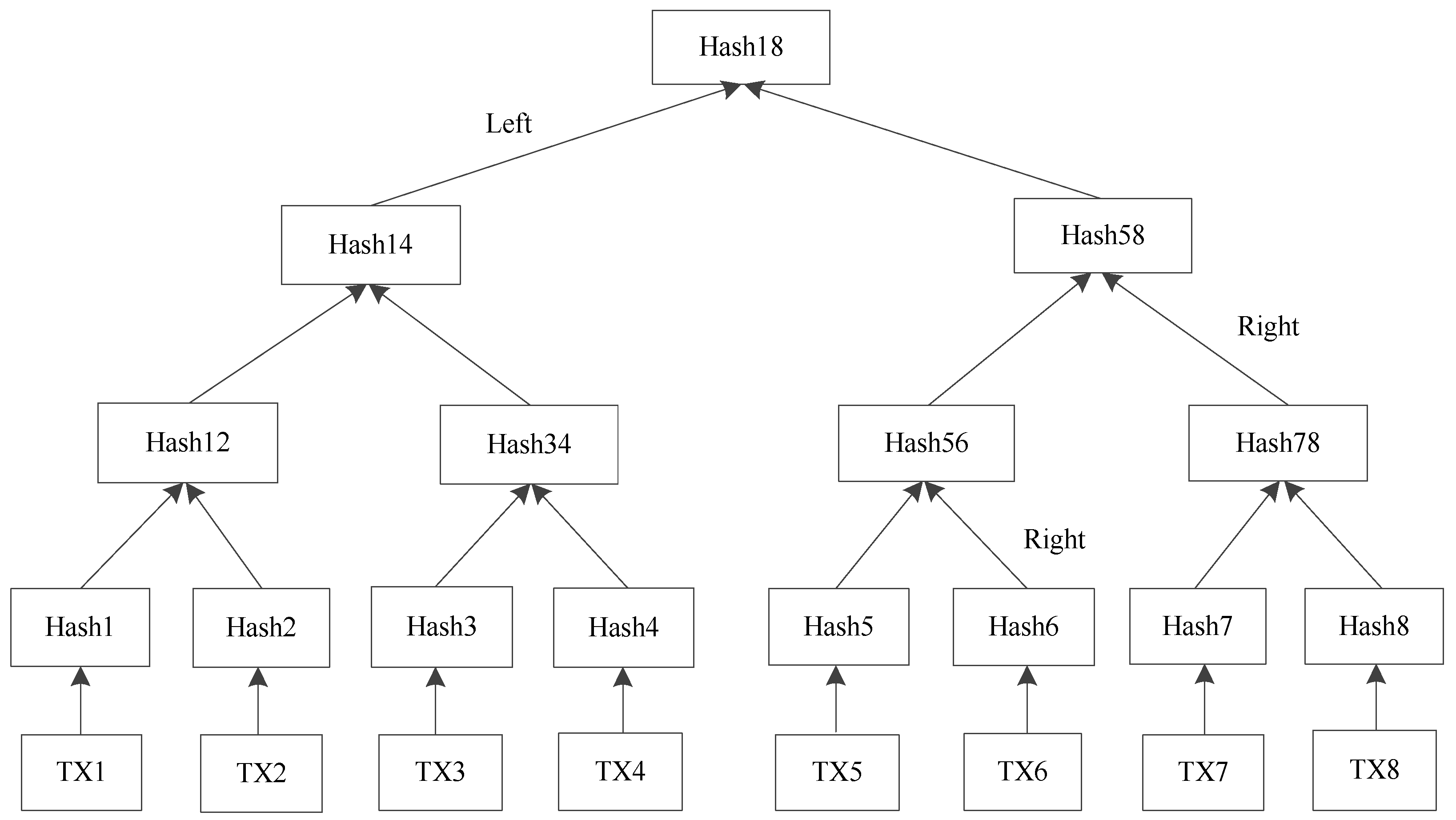
2.2. Blockchain Structure
- (1)
- Public chain: in the public chain, each node can check the transaction and verify it, or participate in the process of reaching a consensus, e.g., Bitcoin and Ethereum.
- (2)
- (3)
- Private chain: in the private chain, nodes will be restricted. Not all nodes can participate in the blockchain. Nodes boast strict permission management for data access.

| Characteristic | Public Chain | Alliance Chain | Private Chain |
|---|---|---|---|
| Decentralization | Completely | Part | Part |
| Immutability | Immutable | Partially variable | Variable |
| Non repudiation | Cannotrefuse | Partial rejection | Can refuse |
| Transparency | Transparent | Partially transparent | Opaque |
| Traceability | Traceable | Partially traceable | Traceable |
| Scalability | Poor | Good | Superior |
| Flexibility | Poor | Good | Superior |
| Ask for permission | No need | Need | Need |
| Consensus algorithm | PoW | PoS Ripple PBFT | PoA |
3. Design of Data Security Access Control Algorithm for Electric Vehicle Internet of Vehicles Based on Blockchain Technology
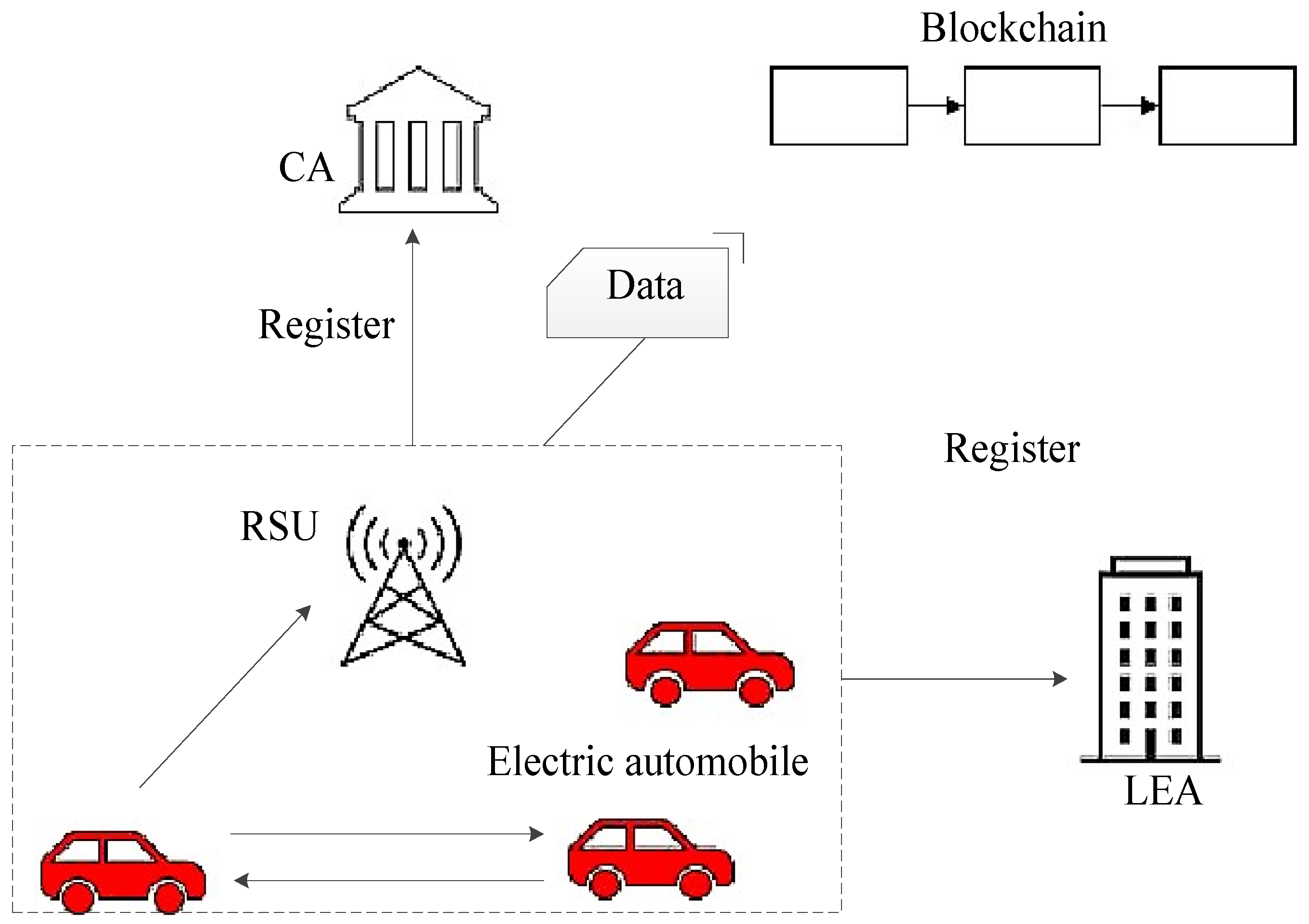
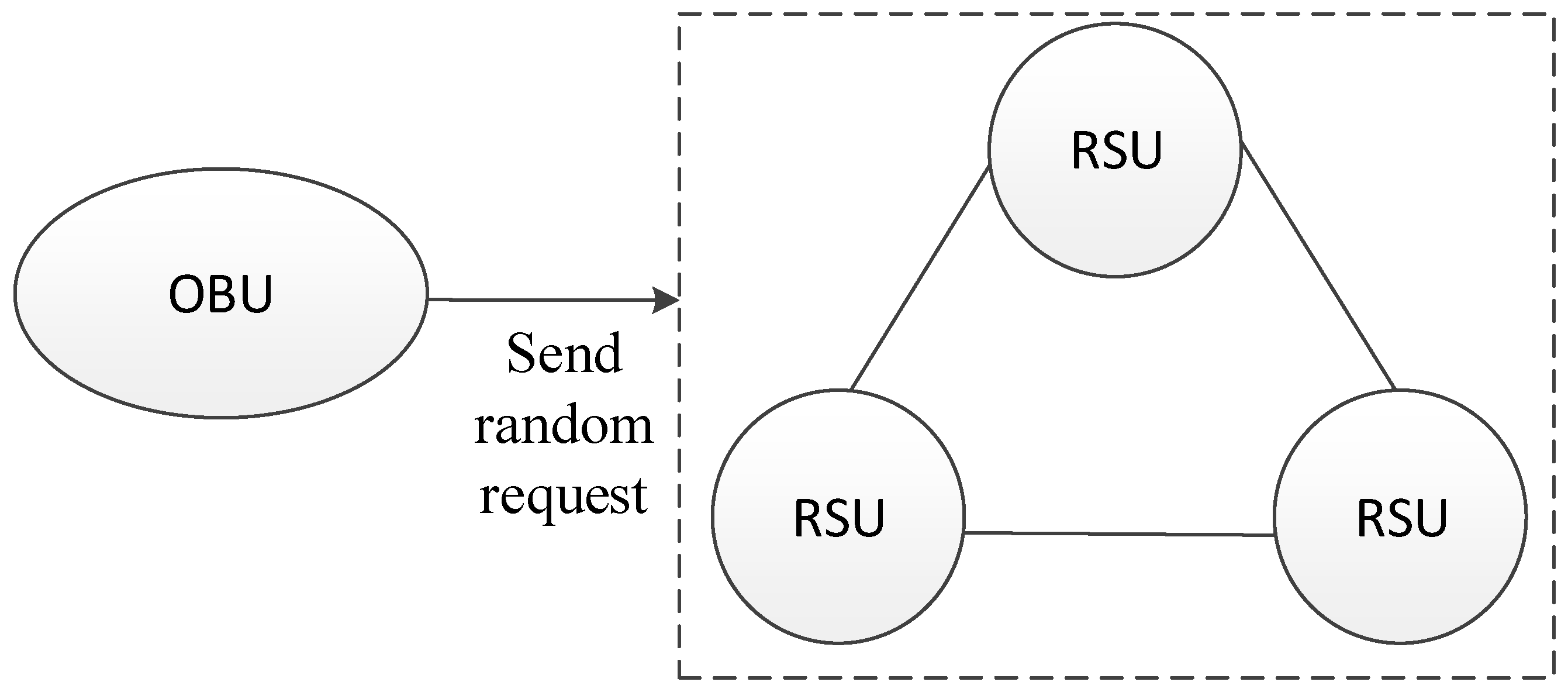
3.1. Composition of Electric Vehicle Networking System
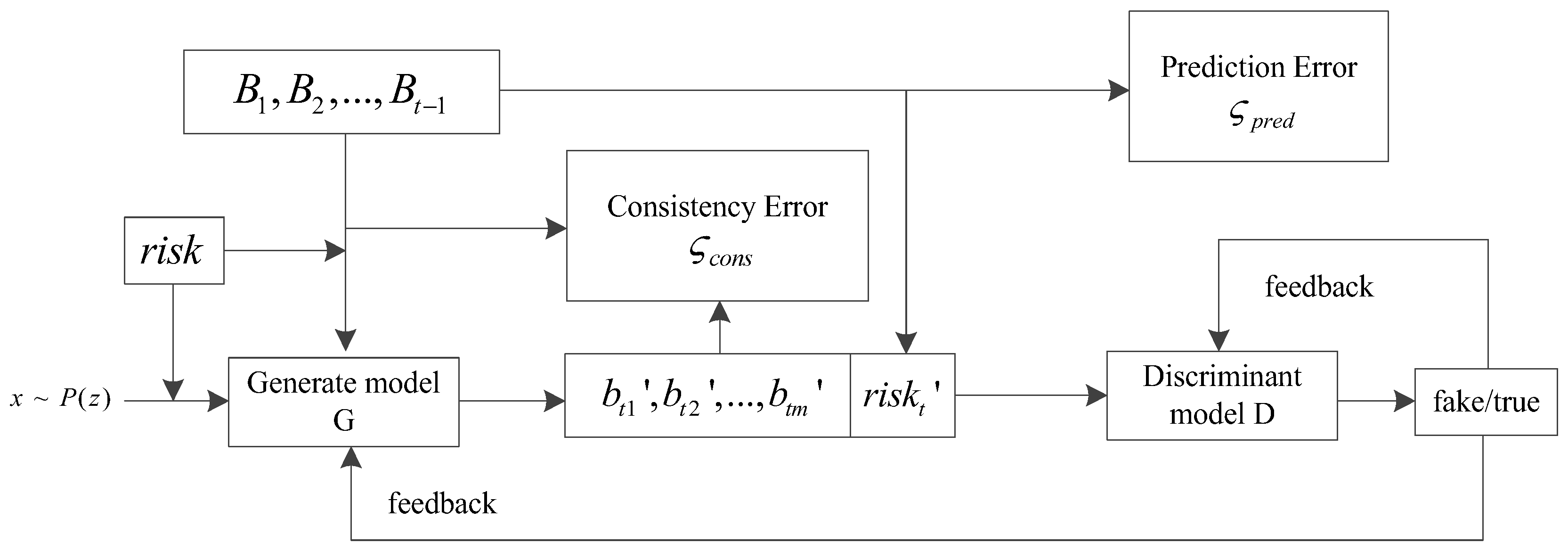
3.2. Data Risk Forecast Model of Electric Vehicle Internet of Vehicles Based on a Generated Countermeasure Network
3.3. Internet of Vehicles Data Access Security Optimization
4. Experiment
4.1. Experimental Scheme
4.2. Experimental Result
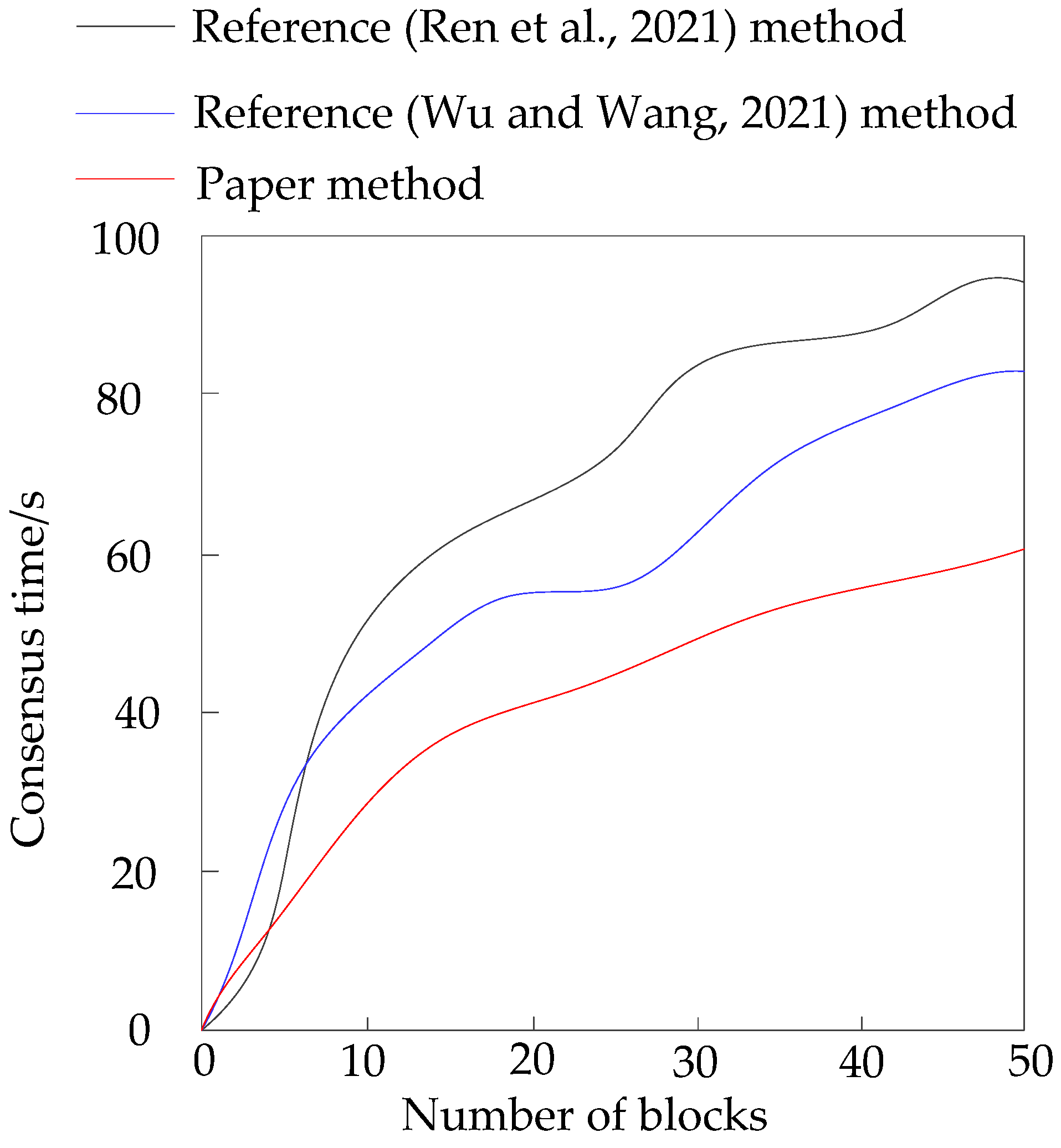
4.2.1. Time Cost of Private Vehicle Encryption
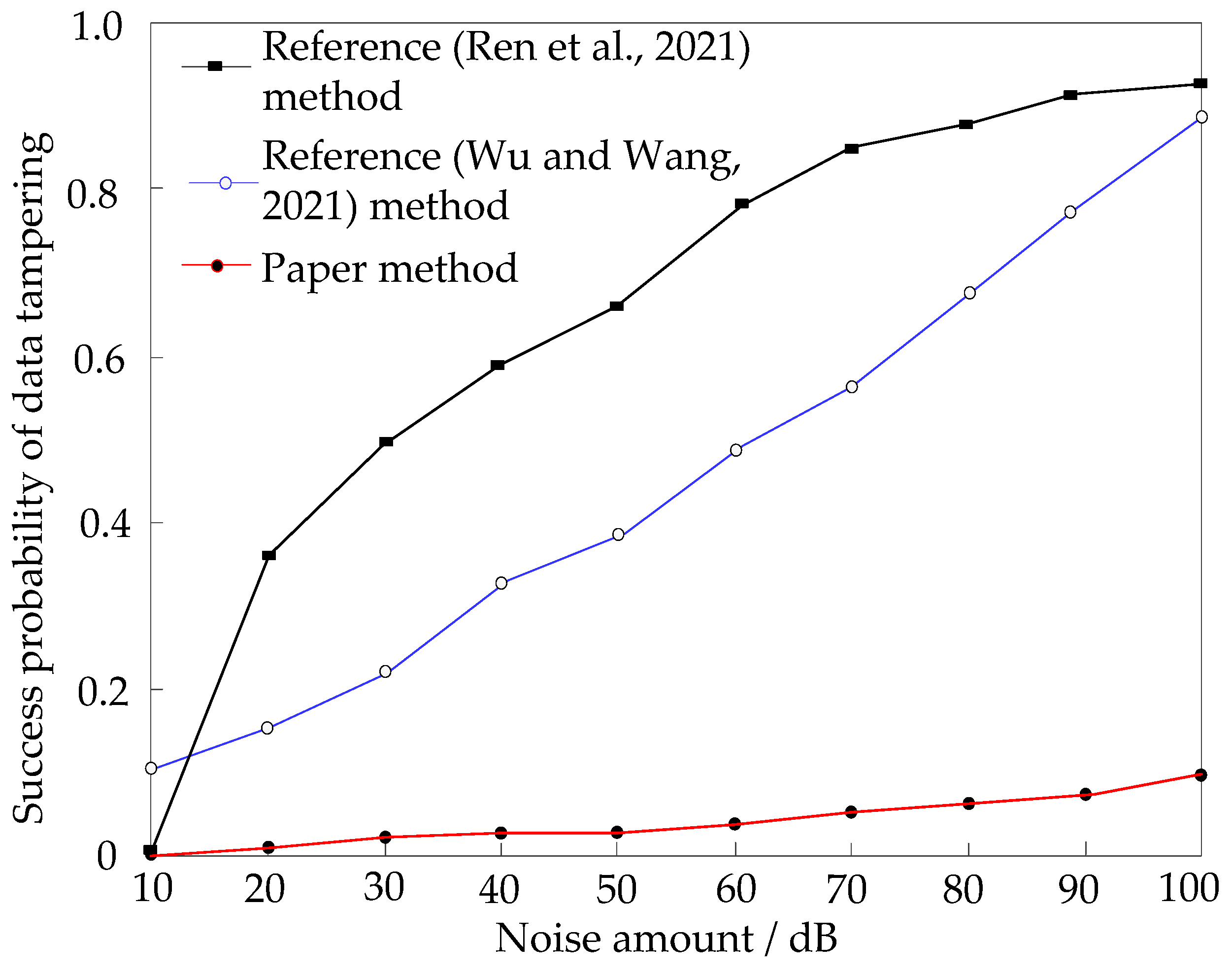
4.2.2. Data Access Security of Electric Vehicle Internet of Vehicles
5. Conclusions
- (1)
- This method can greatly reduce the encryption time of private vehicles. This paper shows that this method of electric vehicle networking has high security.
- (2)
- When the amount of noise is 80 dB, the success probability of vehicle networking data tampering in this method is 0.09; this shows that the data access security of electric vehicle networking based on this method is high.
Funding
Data Availability Statement
Conflicts of Interest
References
- Meng, X.; Lv, J.; Ma, S. Applying improved K-means algorithm into official service vehicle networking environment and research. SoftComput. 2020, 24, 8355–8363. [Google Scholar] [CrossRef]
- Guo, X.; Aoki, T.; Lin, H.H. Model checking of in-vehicle networking systems with CAN and FlexRay. J. Syst. Softw. 2020, 161, 110461. [Google Scholar] [CrossRef]
- Song, M.; Li, R.; Wu, B. Intelligent control method for traffic flow at urban intersection based on vehicle networking. Int. J. Inf. Syst. Chang. Manag. 2020, 12, 35–52. [Google Scholar]
- Wang, X.; Qiu, P. A freight integer linear programming model under fog computing and its application in the optimization of vehicle networking deployment. PLoS ONE 2020, 15, e0239628. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, C. Modeling analysis and algorithm optimization design of vehicle networking based on information transmission. J. Phys. Conf. Ser. 2021, 1769, 12072–12076. [Google Scholar] [CrossRef]
- Ren, T.; Zheng, J.; Chen, Y.; Chen, Q.; Liu, B. Research on data security communication model of Internet of vehicles nodes based on blockchain. Automot. Technol. 2021, 52, 30–35. [Google Scholar]
- Wu, G.; Wang, Y. Secure storage and sharing scheme of Internet of vehicles data based on blockchain and cloud edge computing hybrid architecture. Comput. Appl. 2021, 41, 2885–2892. [Google Scholar]
- Fan, K.; Pan, Q.; Zhang, K.; Bai, Y.; Sun, S.; Li, H.; Yang, Y. A secure and verifiable data sharing scheme based on blockchain in vehicular social networks. IEEE Trans. Veh. Technol. 2020, 69, 5826–5835. [Google Scholar] [CrossRef]
- Oham, C.; Jurdak, R.; Kanhere, S.S.; Dorri, A.; Jha, S. B-fica: Blockchain based framework for auto-insurance claim and adjudication. In Proceedings of the 2018 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Halifax, NS, Canada, 30 July–3 August 2018; pp. 1171–1180. [Google Scholar]
- Kim, H.J.; Choi, M.H.; Kim, M.H.; Lee, S. Development of an Ethernet-based heuristic time-sensitive networking scheduling algorithm for real-time in-vehicle data transmission. Electronics 2021, 10, 157. [Google Scholar] [CrossRef]
- Le, Q.; Jiang, K.; Zhang, F. Design of automatic detection system for vehicle networking communication abnormal data based on CAN bus. Int. J. Inf. Commun. Technol. 2020, 16, 123–136. [Google Scholar] [CrossRef]
- Rawat, D.B.; Doku, R.; Adebayo, A.; Bajracharya, C.; Kamhoua, C. Blockchain enabled named data networking for secure vehicle-to-everything communications. IEEE Netw. 2020, 34, 185–189. [Google Scholar] [CrossRef]
- Hou, R.; Zhou, S.; Cui, M.; Zhou, L.; Zeng, D.; Luo, J.; Ma, M. Data forwarding scheme for vehicle tracking in named data networking. IEEE Trans. Veh. Technol. 2021, 70, 6684–6695. [Google Scholar] [CrossRef]
- Shon, T. In-vehicle networking/autonomous vehicle security for Internet of things/vehicles. Electronics 2021, 10, 637. [Google Scholar] [CrossRef]
- Yang, M. Design of recognition and compensation system for vehicle communication signal based on vehicle networking. Int. J. Veh. Inf. Commun. Syst. 2020, 5, 187–196. [Google Scholar]
- Luo, Q.; Zang, X.; Cai, X.; Gong, H.; Yuan, J.; Yang, J. Vehicle lane-changing safety pre-warning model under the environment of the vehicle networking. Sustainability 2021, 13, 5146. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, R.; Wang, J.; Xu, W. Blockchain-based key management and green routing scheme for vehicular named data networking. Secur. Commun. Netw. 2021, 20, 1–13. [Google Scholar] [CrossRef]
- Zhou, H.; Li, C.; Zhang, L.; Song, W. Attention-Aware Network and Multi-Loss Joint Training Method for Vehicle Re-Identification. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020. [Google Scholar]
- Li, Y.; Xie, Y.Z.; Wang, Y.J.; Jiang, H. Traffic anomaly detection method for vehicular ad-hoc networkflooding attack. J. Nanjing Univ. Sci. Technol. 2020, 44, 454–461. [Google Scholar]
- Li, T.; Xie, Z.F. Advantages and security analysis of Internet of vehicles based on named data network. Commun. Technol. 2019, 52, 106–111. [Google Scholar]
- Raissi, K.; Gouissem, B.B. Hybrid communication architecture in VANETs via named data network. Int. J. Commun. Syst. 2021, 34, 126–139. [Google Scholar] [CrossRef]
- Zhang, H.T. Threat suppression of vehicle network data transmission based on anonymous exchange algorithm. Comput. Simul. 2021, 38, 162–166. [Google Scholar]
- Rana, M.M. IoT-based electric vehicle state estimation and control algorithms under cyber attacks. IEEE Internet Things J. 2019, 7, 874–881. [Google Scholar] [CrossRef]
- Aung, N.; Zhang, W.; Sultan, K.; Dhelim, S.; Ai, Y. Dynamic traffic congestion pricing and electric vehicle charging management system for the internet of vehicles in smart cities. Digit. Commun. Netw. 2021, 7, 492–504. [Google Scholar] [CrossRef]
- Yan, R.; Lin, C.; Zhang, W.F.; Chen, L.W.; Peng, K.N. Research on information security of users’ electricity data including electric vehicle based on elliptic curve encryption. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720968458. [Google Scholar] [CrossRef]
- Iranmanesh, S.; Abkenar, F.S.; Jamalipour, A.; Raad, R. A heuristic distributed scheme to detect falsification of mobility patterns in internet of vehicles. IEEE Internet Things J. 2022, 9, 719–727. [Google Scholar] [CrossRef]
- Ye, J.; Guo, L.; Yang, B.; Li, F.; Du, L.; Guan, L.; Song, W. Cyber–physical security of powertrain systems in modern electric vehicles: Vulnerabilities, challenges, and future visions. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4639–4657. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware | Number of CPU Cores | Dominant Frequency | Framework | Memory | Hard Disk |
|---|---|---|---|---|---|
| parameter | 20 | 3100 MHz | x86 | 64GB | 8T |
| Node Name | Node Function | Number of Nodes |
|---|---|---|
| Main | Block generation | Node monitoring 1 |
| RSU | Block coding and block storage | Multiple |
| OBU | Block verification | Multiple |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, J. Design of a Data Security Access Control Algorithm for the Electric Vehicle Internet of Vehicles Based on Blockchain Technology. World Electr. Veh. J. 2022, 13, 111. https://doi.org/10.3390/wevj13070111
Miao J. Design of a Data Security Access Control Algorithm for the Electric Vehicle Internet of Vehicles Based on Blockchain Technology. World Electric Vehicle Journal. 2022; 13(7):111. https://doi.org/10.3390/wevj13070111
Chicago/Turabian StyleMiao, Jia. 2022. "Design of a Data Security Access Control Algorithm for the Electric Vehicle Internet of Vehicles Based on Blockchain Technology" World Electric Vehicle Journal 13, no. 7: 111. https://doi.org/10.3390/wevj13070111
APA StyleMiao, J. (2022). Design of a Data Security Access Control Algorithm for the Electric Vehicle Internet of Vehicles Based on Blockchain Technology. World Electric Vehicle Journal, 13(7), 111. https://doi.org/10.3390/wevj13070111