

Research on Control Method of Dual-Motor Load Simulator

Abstract
:1. Introduction
2. Working Principle of Electric Load Simulator and Dual-Motor Load Simulator
- (1)
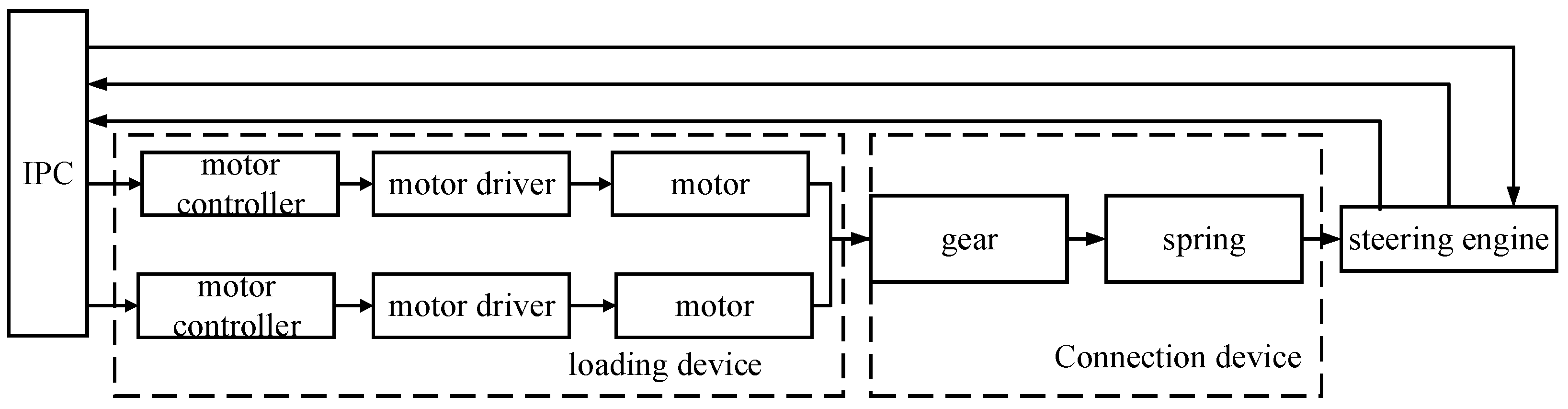
- The torque loading part is changed from single-motor to double-motor. It can not only share the loading task with two motors, but also restrain the interference caused by backlash with the dual-motor drive redundancy algorithm.
- (2)
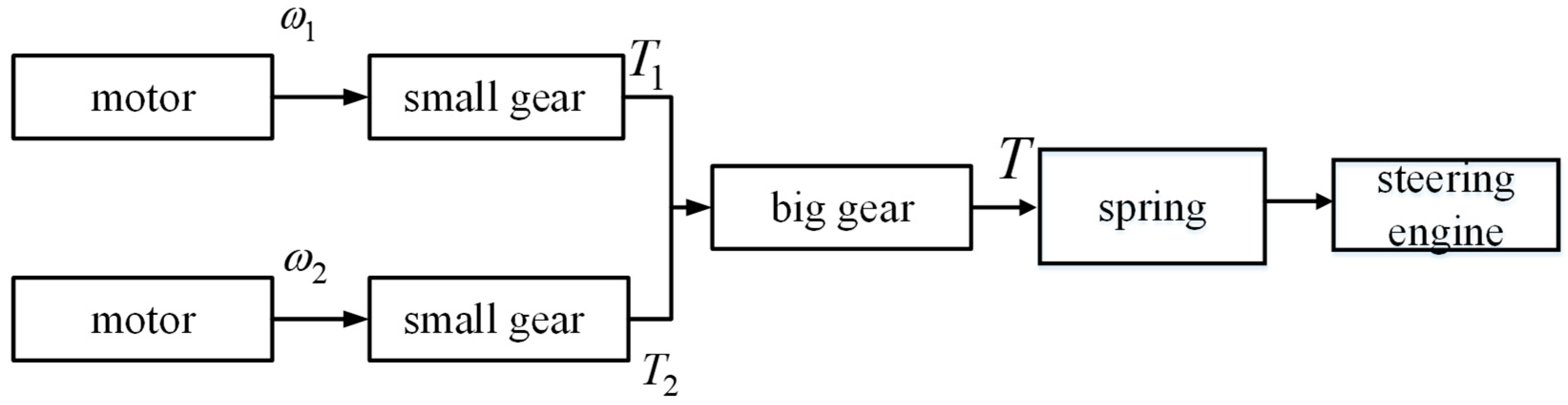
- The loading torque is not directly output to the tested steering gear. Instead, the resultant torque is first output through the gear structure. The schematic diagram of the gear drive is shown in Figure 3. The two small gears rotate at the same time and push the big gear to rotate together. The big gear is connected with the metal rubber buffer spring and outputs the simulated hinge torque to the tested steering gear.
- (1)
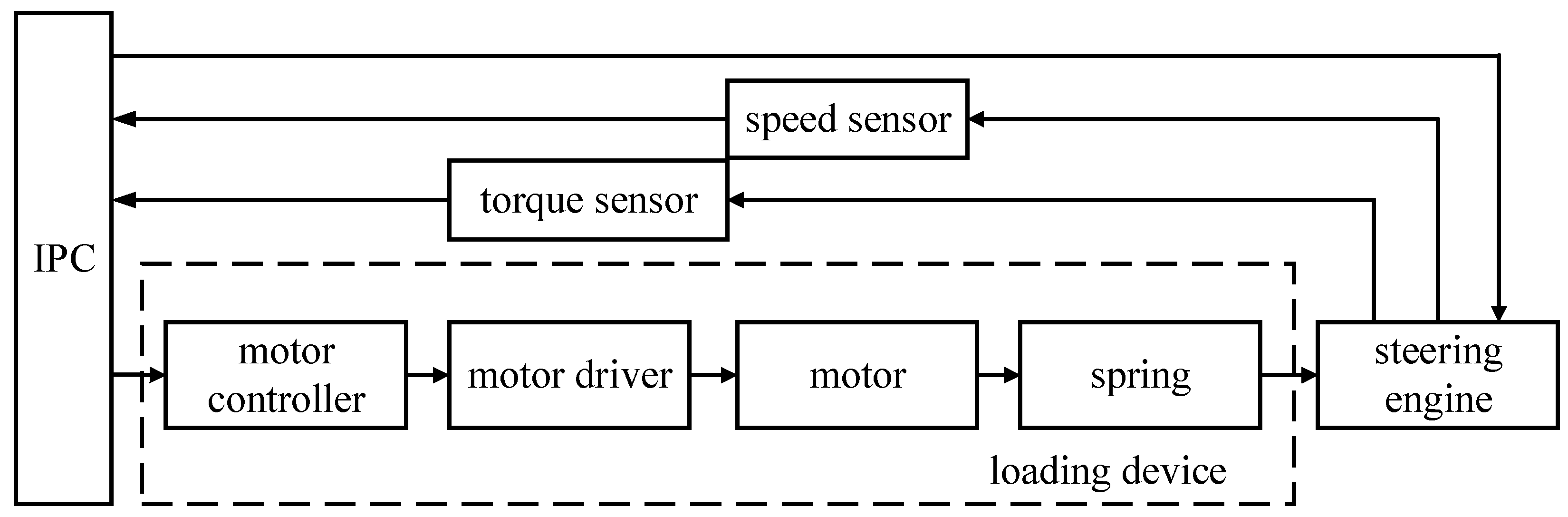
- The industrial computer outputs the preset torque signal to the motor controller of each motor, and the control signal makes each loading motor output the loading torque to the gear through the motor driver.
- (2)
- The two pinions jointly drive the big gear to rotate, and the combined loading torque is output to the tested steering gear through the metal rubber buffer spring.
- (3)
- The IPC independently controls the movement of the tested steering gear and receives the steering gear sensor signal to evaluate the performance of the steering gear, and completes the steering gear test experiment.
3. Mathematical Model of Dual Motor Load Simulator
- (1)
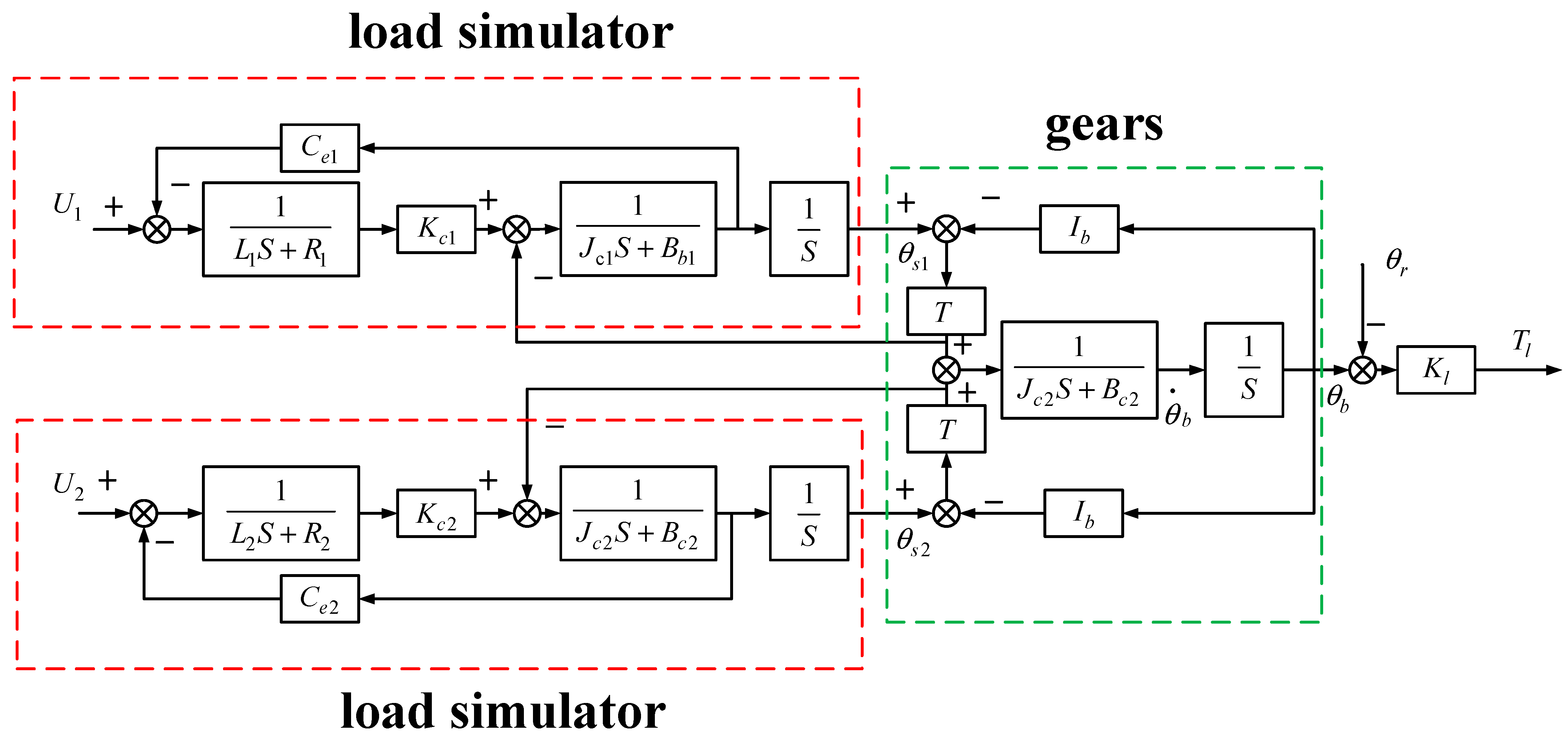
- The structure of the double-motor load simulator is established, and the gear connection structure is introduced to model and analyze it. At the same time, irrelevant factors such as viscous friction coefficient are ignored. The influence of redundant torque and backlash interference on the loading torque are highlighted;
- (2)
- The metal rubber buffer spring is introduced into the system to improve the connection between the loading motor and the tested steering gear. Compared with the commonly used spring rod structure, the buffer spring can realize continuous loading with variable stiffness and has better practical value.
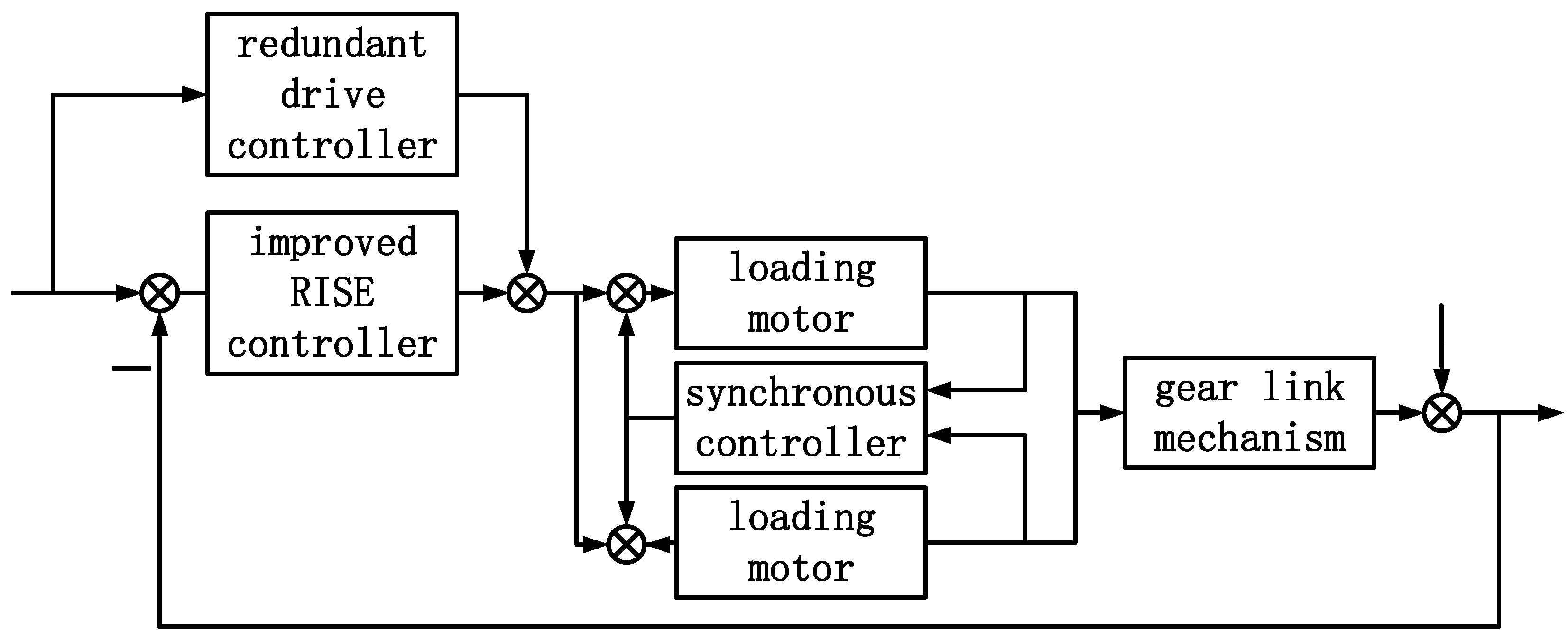
4. Control Strategy Design of Dual-Motor Load Simulator
- (1)
- Aiming at the problem of system output torque control, the controller is designed based on the improved RISE control strategy. The RISE controller is improved by combining the dimension-matching criterion of the self-coupling PID and the adaptive symbolic integration, which simplifies the parameter-tuning process and improves the tracking effect.
- (2)
- Aiming at the problem of backlash interference, a backlash compensator is designed based on the dual-motor drive redundancy strategy. Based on the analysis of the generating link of the backlash, the system preset is used as the input of the compensator, and the backlash interference is compensated by changing the output direction of the dual motors in turn.
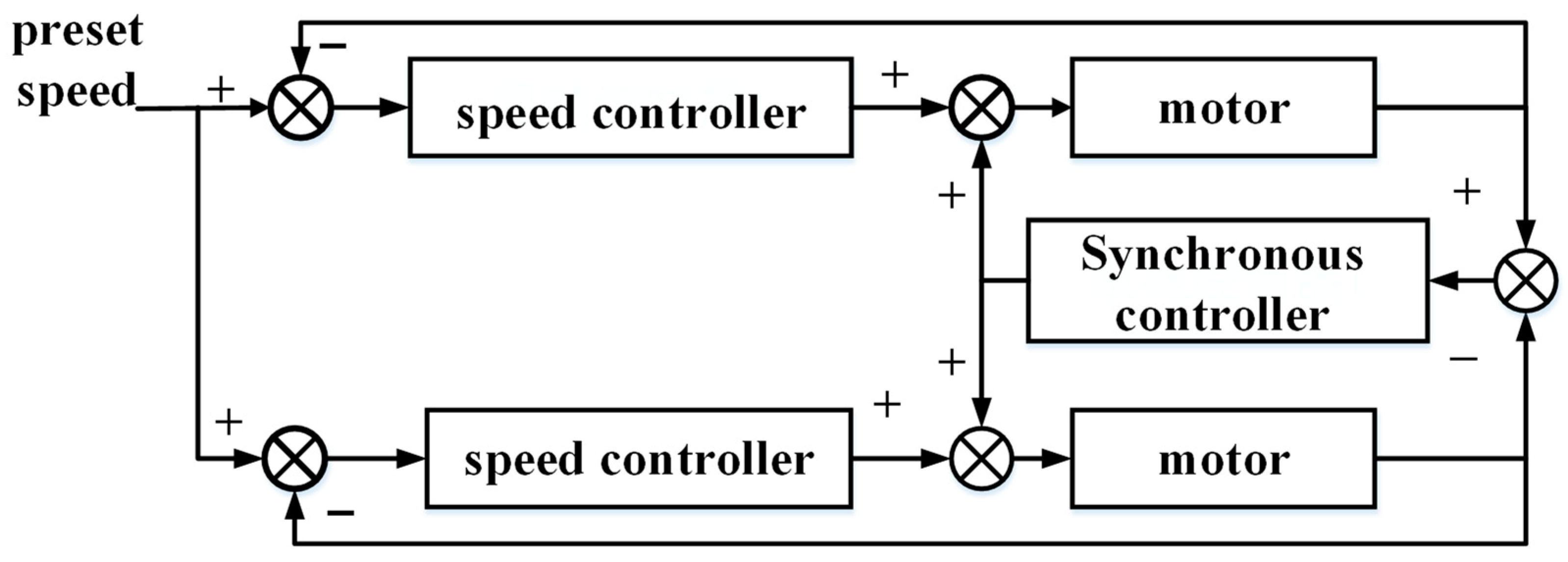
- (3)
- Aiming at the problem of asynchronous running speed of dual motors caused by the difference of dual-motor parameters, a synchronization controller is designed based on cross-coupling control to ensure the synchronous running of the dual-motor system. The tracking differentiator is used to eliminate noise and interference, and the improved RISE control strategy is combined to ensure the speed synchronization of the two motors in operation.
- (1)
- Based on the dimension-matching principle of self-coupling PID control, the paper improves it. In RISE control, parameters, , , are independent parameters. There is no universal tuning method in parameter tuning. According to the physical attributes in the control link, each parameter can be regarded as a unified whole through the dimension-matching mechanism. It can not only simplify the parameter adjustment process, but also optimize the control effect by making use of the internal connection of each link [25]. References [26,27] proved through experiments that the improved control method of the dimension-matching criterion has better anti-interference and better control performance than the original algorithm.Analyzing the physical significance of each link in RISE control:In RISE control, both the actual output and the preset output are assumed to be generalized displacements with the dimensional attribute of generalized displacements.
- can be written to . is a generalized displacement error. Its dimension attribute is a generalized displacement, temporarily recorded as . is the differential of the generalized displacement, with the dimensional attribute of the generalized velocity, temporarily recorded as .
- can be written to . The dimension attribute of generalized displacement is temporarily recorded as . has the dimension attribute of generalized displacement · second, temporarily recorded as .
- is dimensionless, considering that the symbolic integral functions in the controller can quickly make the error return to 0 through the symbolic function in case of small error, similar to the role of differential term in general control. Therefore, the dimensional attribute with generalized velocity is defined.
- Introduce the speed factor (dimension is 1/s) into the RISE controller and rewrite the controller expression as followsIn the improved formula, each part of the sum has the highest dimension attribute. It can be seen from reference [28] that this method has global stability in the third-order system when the speed factor is greater than 0.
- (2)
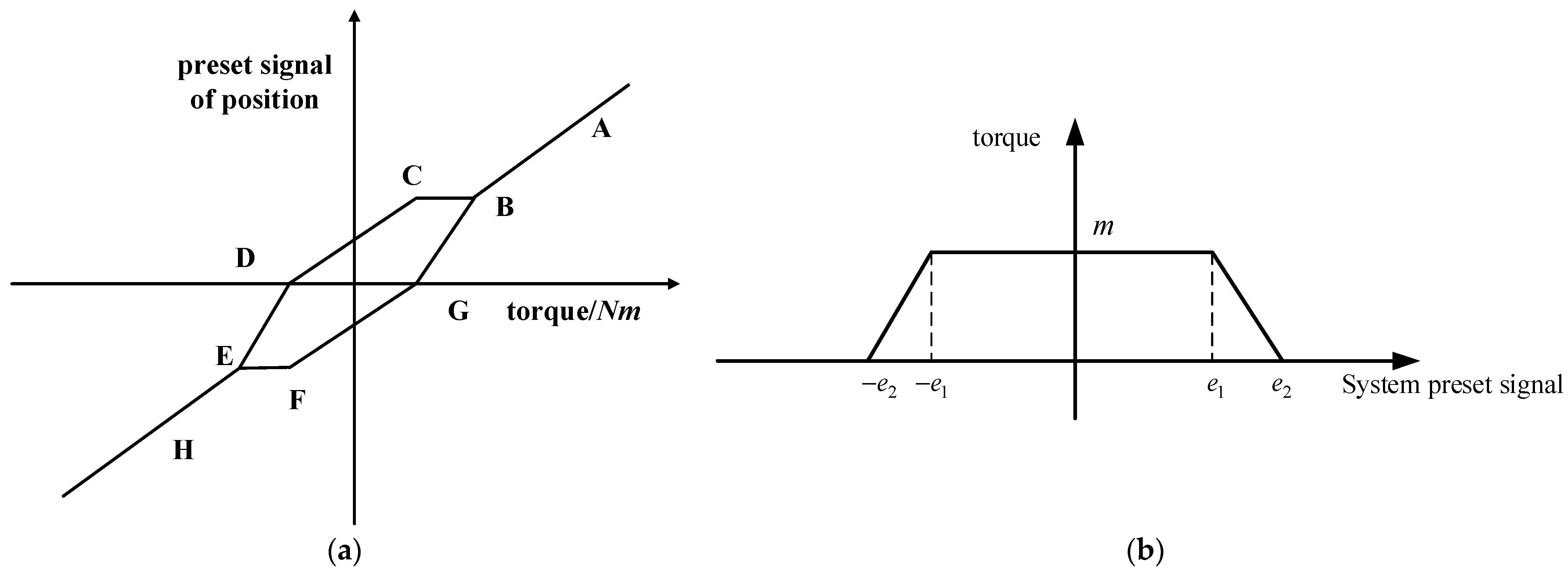
- Variable Parameter Control Based on Sigmoid Function
- (1)
- When the direction of the output torque of the system changes, the indirect contact surface of the gear will also change, and the backlash interference will be formed in the process of changing the contact surface.
- (2)
- When the system is started, the gear contact surface may change and the backlash interference may be formed.
- (1)
- A tracking differentiator is added to track the motor speed signal as the input of the RISE controller. The tracking differentiator obtains the tracking signal and its derivative through the fastest synthesis function, which can effectively filter out noise and high-order interference. The mathematical expression of the tracking differentiator isThe function is as follows:
- (2)
- The sign function in the RISE controller is replaced with the limiting function. Symbolic functions enable the controller to quickly adjust the output within small errors and ranges. The sign function is improved into a continuous limiting function, The output of sat (e2) will not have a sudden change, which is more conducive to speed synchronization control. The improved controller is
5. Results and Discussion
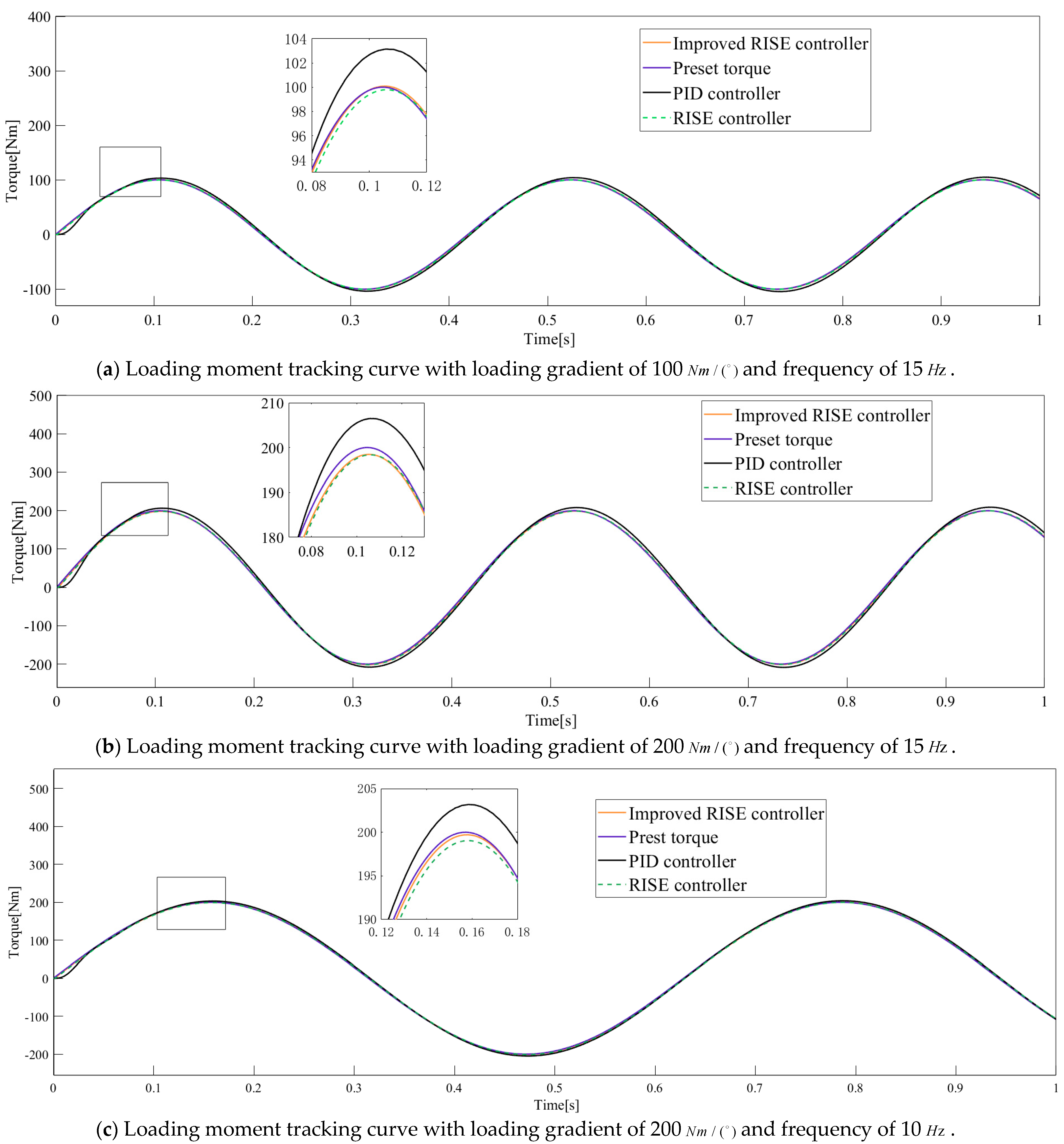
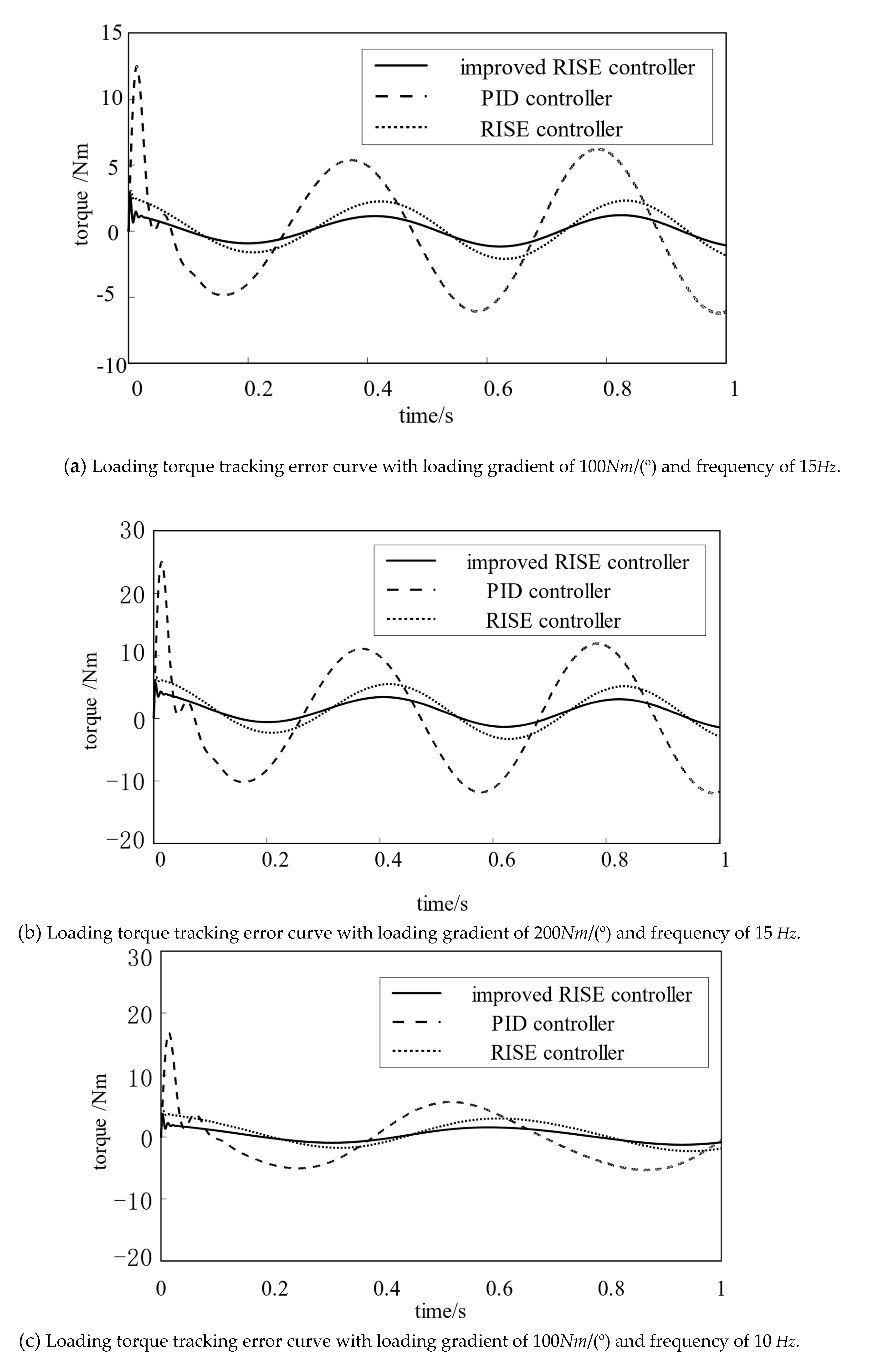
- (1)
- Under the same loading frequency, the tracking error of the RISE controller is better by changing the loading gradient. When the loading frequency is 15Hz, the loading gradient is changed to 100 Nm/(°) and 200 Nm/(°), and the error of the improved RISE controller is 1.13% and 1.70%, which is far lower than the former two control methods. Under the conditions of 15Hz and 200 Nm/(°), the tracking error of the improved RISE controller is 72.5% and 44.0% lower than that of PID controller and RISE controller, respectively.
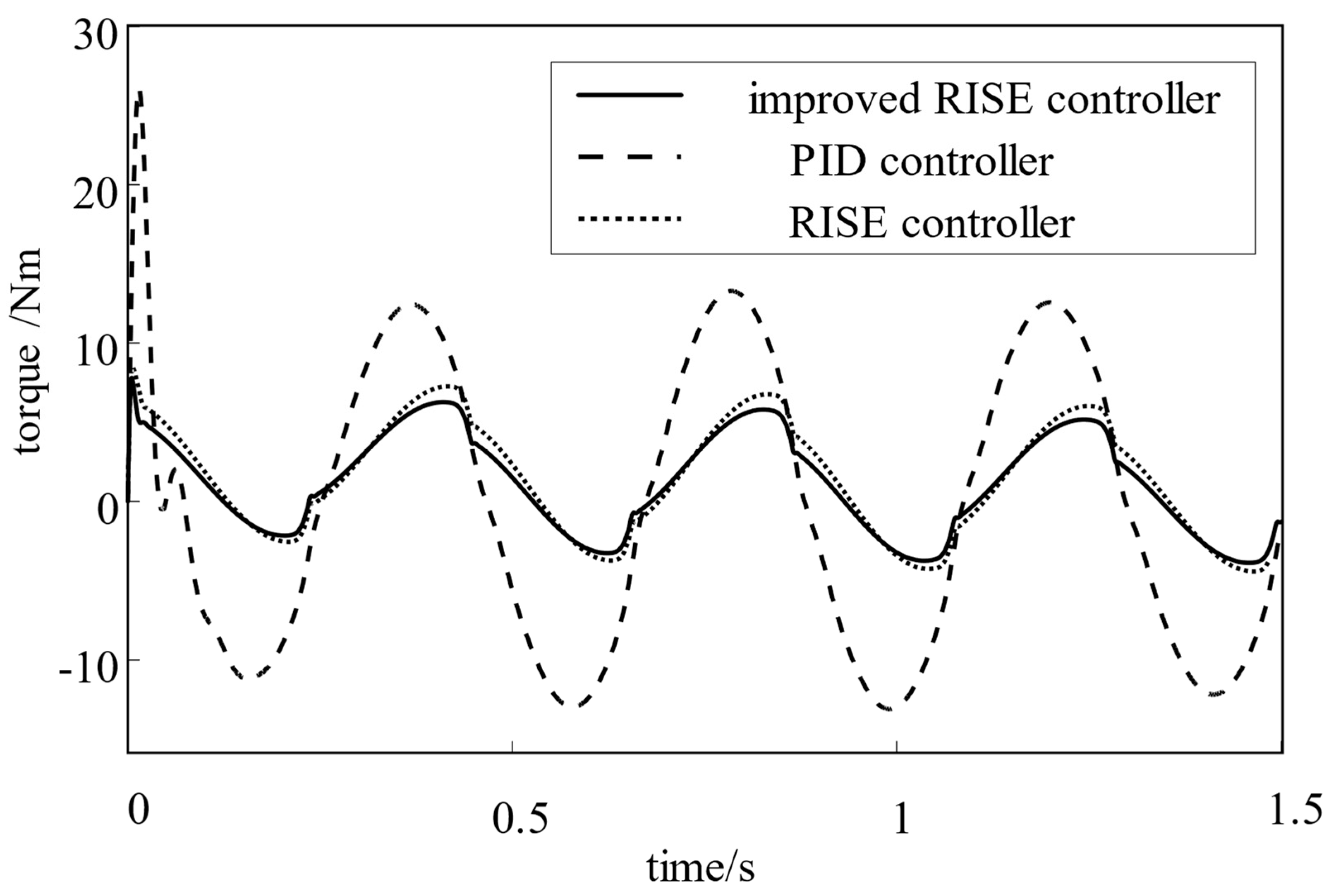
- (2)
- Change the frequency of the preset signalunder the same loading gradient condition 200 Nm/(°). The tracking error effect of the improved RISE controller is still the best, and the error at 10:00 is only 0.77%. Compared with the PID controller and RISE controller, the tracking error is reduced by 72.8% and 47.3%, respectively, and the effect is significantly improved. When the system is started, the improved RISE controller has no error peak, which proves that the adaptive integral factor plays a role in improving the accuracy.
Influence of Backlash and Dual Motor Parameters on Control Error
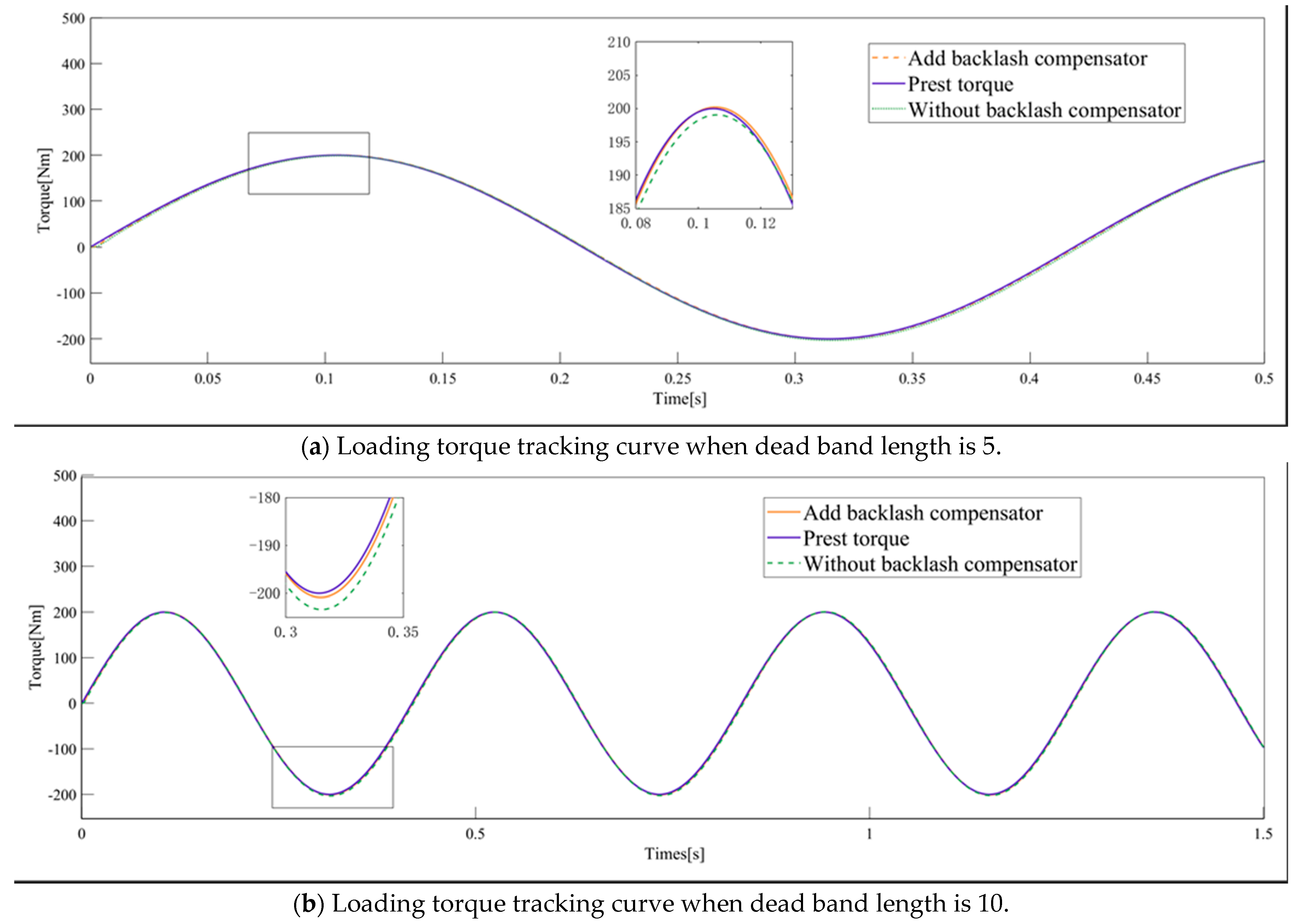
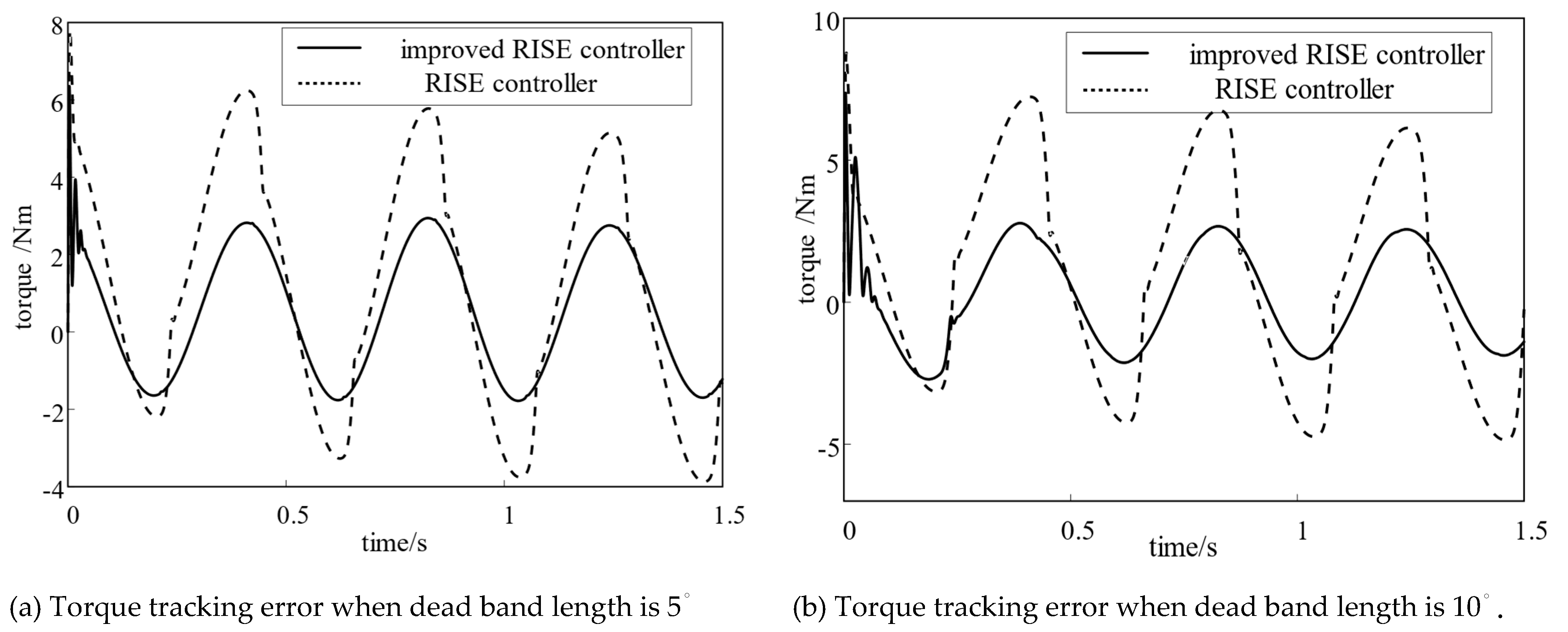
- (1)
- After compensating the system backlash interference, the system loading torque tracking error decreases by 52% and 57%. It is proved that the offset force compensation method can effectively eliminate the influence of backlash on tracking error in dual-motor system. The offset force compensation has an excellent inhibition effect for different backlash.
- (2)
- Under different backlash conditions, the cross-coupling control strategy improved by tracking differentiator can keep the speed synchronization of the two motors. According to the tracking error curve, the response time of the system is accelerated, and the speed error is reduced by 62.1% and 61.2%, which proves that the improved algorithm can effectively control the smooth synchronous operation of dual motors.
- (3)
- According to the analysis in Table 1 and Table 4, the proposed composite control strategy of the loading torque controller backlash compensator speed synchronization controller can achieve high-precision output of system loading torque under the conditions of redundant torque disturbance, backlash dead zone disturbance, and dual-motor parameter difference in the aircraft steering gear electric load simulator with dual-motor loading structure.
6. Conclusions
- (1)
- The electric load simulator of an aircraft steering gear loaded with two motors is designed, which can output the loading torque through the cooperation of two motors. A compound control strategy consisting of torque control feedback, backlash compensation feedforward, and cross-coupling speed synchronization control of dual motors is proposed.
- (2)
- Compared with the conventional PID controller, the proposed compound control strategy can achieve the accurate output of analog torque, and the error is only 1.13% when there is only the disturbance of redundant torque. The tracking error is only 1.54% under the conditions of redundant torque, backlash interference, and different parameters of dual motors. The experimental results show the effectiveness of the proposed control strategy.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, Y.B.; Yu, Z.L.; Ma, G.Q. Model Error Analysis of Load Simulator System. J. Phys. Conf. Ser. 2020, 1676, 1–11. [Google Scholar] [CrossRef]
- Yang, B.; Bao, R.; Han, H. Robust hybrid control based on PD and novel CMAC with improved architecture and learning scheme for electric load simulator. IEEE Trans. Ind. Electron. 2014, 61, 5271–5279. [Google Scholar] [CrossRef]
- Li, C.G.; Jin, H.T.; Jiao, Z.X. Mechanism and suppression of extraneous torque of motor driver load simulator. J. Beijing Univ. Aeronaut. Astronaut. 2006, 32, 204–208. [Google Scholar]
- Jiao, Z.X.; Hua, Q.; Wang, X.D.; Zhang, S.P. Estimation for performance of load simulator. Chin. J. Mech. Eng. 2002, 38, 26–30. [Google Scholar] [CrossRef]
- Gao, F.; Lin, H.; Du, X.G. Research of a dynamic measuring method of moment of inertia and an elimination method of plus torque in electric loading system. Comput. Meas. Control 2005, 13, 635–637. [Google Scholar]
- Lyu, S.S.; Lin, H. Composite control for electric dynamic loading system based on fractional order iterative learning. J. Beijing Univ. Aeronaut. Astronaut. 2016, 42, 1944. [Google Scholar]
- Bo, Y.; Fuhuang, L.; Meng, Z. A Loading Control Strategy for Electric Load Simulator Based on New Mapping Approach and Fuzzy Inference in Cerebellar Model Articulation Controller. Meas. Control 2019, 52, 131–144. [Google Scholar]
- Gu, N.; Yang, B. Semi-fuzzy CMAC and PD hybrid controller with compressed memory and semi-regularization for electric load simulator. IET Control Theory Appl. 2019, 13, 3065–3074. [Google Scholar] [CrossRef]
- Zheng, D.K.; Xu, H.G. Torque tracking experiment of a friction based electro-hydraulic load simulator. J. of Harbin Inst. of Technol. Jan. 2017, 49, 66–71. [Google Scholar]
- Dai, M.G.; Qi, R. Backstepping sliding mode control of electric dynamic load simulator based on extended state observer. Acta Aeronaut. ET Astronaut. Sin. 2020, 41, 280–290. [Google Scholar]
- Wang, L.S.; Wang, M.Y.; Guo, B. A high frequency loading control strategy based on proportional resonant control and stability analysis for electric load simulators. Proc. CSEE 2018, 38, 4262–4270. [Google Scholar]
- Liu, X.L.; Jiang, M.X. A study on double loop composite control based on WOA for an aircraft rudder electric loading system. J. Vib. Shock. 2021, 40, 246–253, 289. [Google Scholar]
- Liu, H.; Liu, H.; Shan, X. Linear active disturbance rejection control with torque compensation for electric load simulator. J. Power Electron. 2021, 21, 195–203. [Google Scholar] [CrossRef]
- Niu, G.C.; Wang, W.; Zong, G.H. Composite control for electric load simulator based on iterative learning. Control Theory Appl. 2014, 31, 1740–1747. [Google Scholar]
- Dai, M.G.; Qi, R. Composite iterative learning control for electric dynamic loading system with control time delay. J. Beijing Univ. Aeronaut. Astronaut. 2020, 46, 340–349. [Google Scholar]
- Li, C.C.; Wang, G.L.; Pan, X.D.; Li, Y.F. Research on parameter identification method of friction model for electric load simulator. J. Vib. Meas. Diagn. 2020, 40, 519–525, 626. [Google Scholar]
- Pan, W.D.; Fan, Y.X.; Lei, J.J.; Dawei, C.A.O.; Pengcheng, L.U.; Zhiwei, X.U. Effect of friction on electric linear load simulator and research on friction suppression. Acta Armamentarii 2019, 40, 2050–2059. [Google Scholar]
- Patre, P.M.; Mackunis, W.; Makkar, C.; Dixon, W.E. Asymptotic tracking for systems with structured and unstructured uncertainties. IEEE Trans. Control Syst. Technol. 2008, 16, 373–379. [Google Scholar] [CrossRef]
- Shin, J.; Kim, H.J.; Kim, Y.; Dixon, W.E. Autonomous flight of the rotorcraft-based UAV using RISE feedback and NN feedforward terms. IEEE Trans. Control Syst. Technol. 2012, 20, 1392–1399. [Google Scholar] [CrossRef] [Green Version]
- Fishcher, N.; Bhasin, S.; Dixon, W.E. Nonlinear control of an autonomous underwater vehicle: A RISE-based approach. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 3972–3977. [Google Scholar]
- Arcolezi, H.H.; Nunes, W.R.; de Araujo, R.A.; Cerna, S.; Sanches, M.A.; Teixeira, M.C.; de Carvalho, A.A. RISE controller tuning and system identification through machine learning for human lower limb rehabilitation via neuromuscular electrical stimulation. Eng. Appl. Artif. Intell. 2021, 102, 13. [Google Scholar] [CrossRef]
- Hfaiedh, A.; Chemori, A.; Abdelkrim, A. Observer-based robust integral of the sign of the error control of class I of underactuated mechanical systems: Theory and real-time experiments. Trans. Inst. Meas. Control 2022, 44, 339–352. [Google Scholar] [CrossRef]
- Lee, D.; Byun, J.; Kim, H.J. RISE-based trajectory tracking control of an aerial manipulator under uncertainty. IEEE Control Syst. Lett. 2022, 6, 3379–3384. [Google Scholar] [CrossRef]
- Meng, Q.; Liu, N.; Shao, X.; Yang, W. Desired Compensation RISE Attitude Control for a Quadrotor UAV with Adaptive Gain Adjustment. Electron. Opt. Control 2020, 27, 25–29. [Google Scholar]
- Zhao, G.F.; Fan, W.D.; Chen, Q.W.; Hu, W.L. A survey on backlash nonlinearity. Acta Armamentarii 2006, 6, 1072–1080. [Google Scholar]
- Zeng, Z.Z.; Liu, W.J. Self-coupling PID controllers. Acta Autom. Sin. 2021, 47, 404–422. [Google Scholar]
- Zeng, Z.Z.; Chen, Z.Y. On control theory of PID and auto-coupling PID. Control. Theory Appl. 2020, 37, 2654–2662. [Google Scholar]
- Su, J.; Zeng, Z.H. Auto-coupling pid control method for nonlinear time varying systems. Control. Theory Appl. 2022, 39, 299–306. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Method | Frequency/(Hz) | Loading Gradient/(N·m/(°)) | Amplitude/(N·m) | Error of Amplitude/% |
|---|---|---|---|---|
| PID controller | 15 | 100 | 105.37 | 5.37 |
| 15 | 200 | 211.63 | 5.57 | |
| 10 | 200 | 206.66 | 2.83 | |
| RISE controller | 15 | 100 | 97.69 | 2.31 |
| 15 | 200 | 194.53 | 2.73 | |
| 10 | 200 | 197.06 | 1.46 | |
| Improved RISE controller | 15 | 100 | 98.86 | 1.13 |
| 15 | 200 | 196.94 | 1.53 | |
| 10 | 200 | 198.46 | 0.77 |
| Controller Method | Error of Amplitude/(N·m) | Error of Amplitude/% | Error of Amplitude/(N·m) |
|---|---|---|---|
| PID controller | 13.21 | 6.61 | 13.21 |
| RISE controller | 7.21 | 3.61 | 7.21 |
| Improved RISE controller | 6.24 | 3.12 | 6.24 |
| Control Method | Length of Backlash | Error of Amplitude/(N·m) | Error of Amplitude/% |
|---|---|---|---|
| Uncompensated clearance, asynchronous speed | 0 | 3.40 | 1.70 |
| 5 | 6.23 | 3.12 | |
| 10 | 7.24 | 3.62 | |
| Compensation clearance, synchronous speed | 0 | 2.93 | 1.46 |
| 5 | 2.94 | 1.47 | |
| 10 | 3.08 | 1.54 |
| Control Method | Length of Backlash | Speed/(m/s) | Error of Speed/% |
|---|---|---|---|
| No speed synchronization | 5 | 183.7 | 2.96 |
| 10 | 182.3 | 2.97 | |
| Speed synchronization | 5 | 70 | 1.12 |
| 10 | 70.7 | 1.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Li, J. Research on Control Method of Dual-Motor Load Simulator. World Electr. Veh. J. 2023, 14, 28. https://doi.org/10.3390/wevj14020028
Liu X, Li J. Research on Control Method of Dual-Motor Load Simulator. World Electric Vehicle Journal. 2023; 14(2):28. https://doi.org/10.3390/wevj14020028
Chicago/Turabian StyleLiu, Xiaolin, and Jinkai Li. 2023. "Research on Control Method of Dual-Motor Load Simulator" World Electric Vehicle Journal 14, no. 2: 28. https://doi.org/10.3390/wevj14020028
APA StyleLiu, X., & Li, J. (2023). Research on Control Method of Dual-Motor Load Simulator. World Electric Vehicle Journal, 14(2), 28. https://doi.org/10.3390/wevj14020028