

Variable Switching Frequency Deadbeat Predictive Current Control for PMSM with High-Speed and Low-Carrier Ratio

Abstract
:1. Introduction
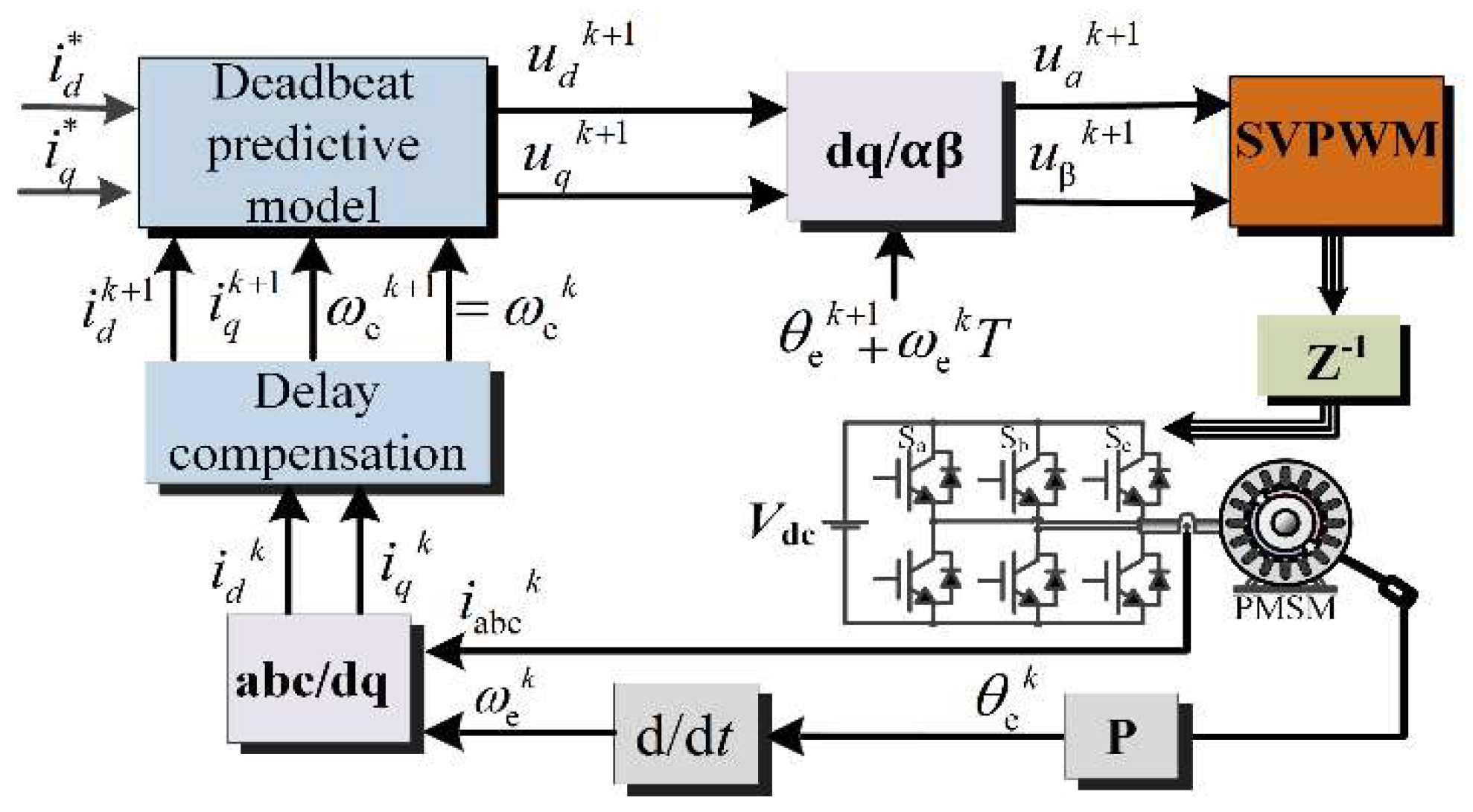
2. Deadbeat Predictive Current Control Principle and Error Analysis
3. Variable Switching Frequency Deadbeat Predictive Current Control
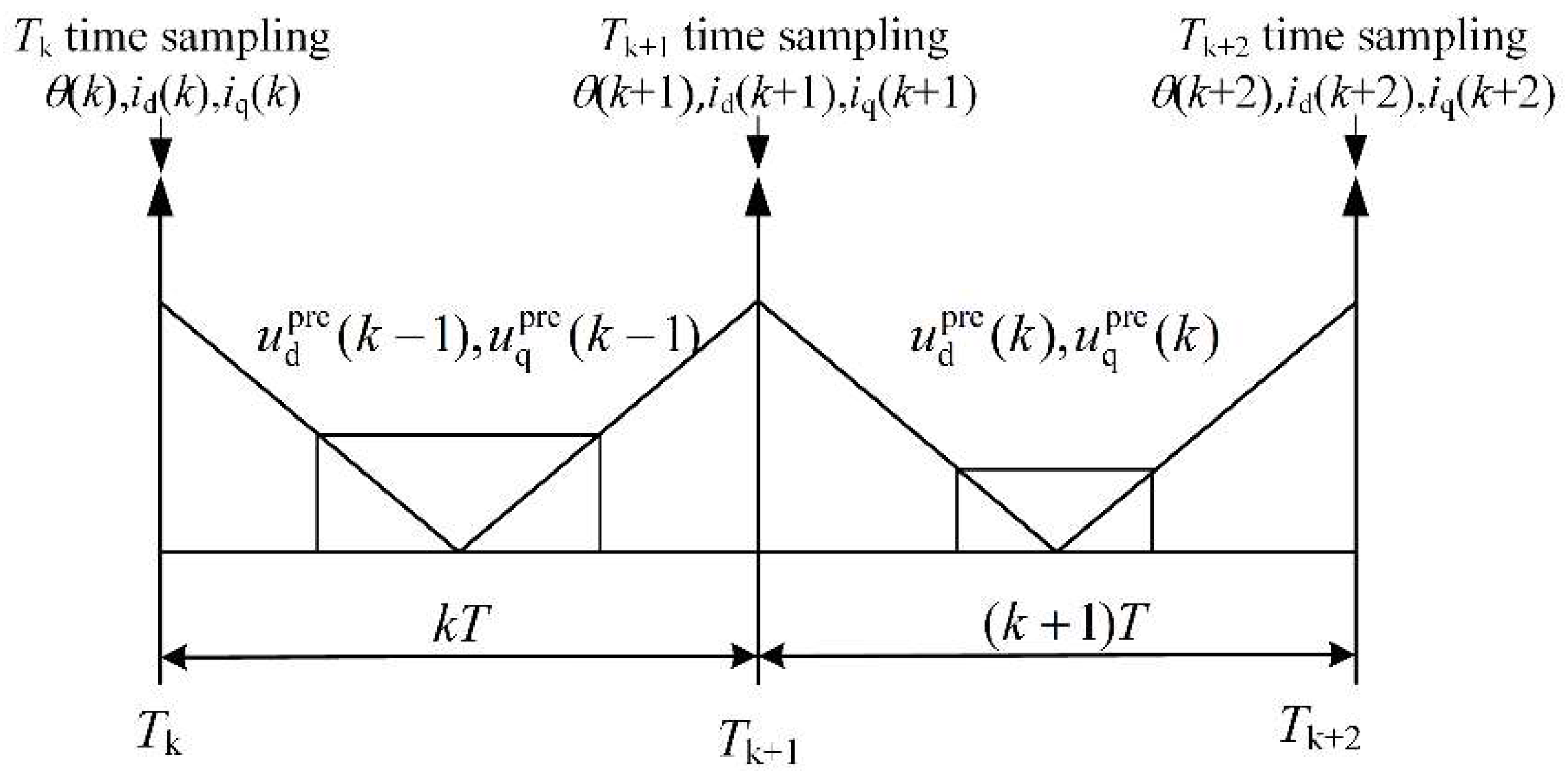
3.1. Improved Prediction Model Suits Low Carrier Ratio Condition
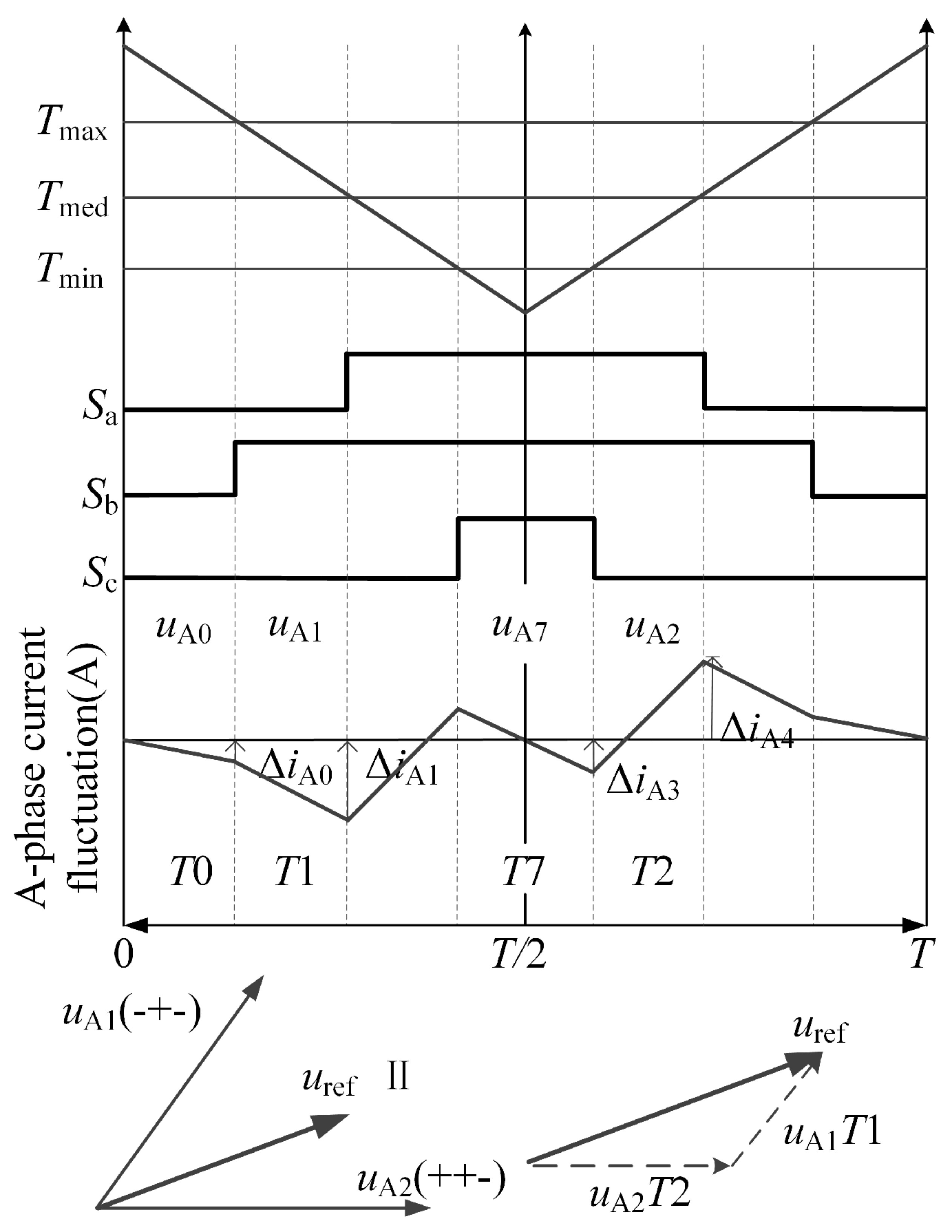
3.2. Clamping PWM Modulation Strategy
4. Simulation and Experimental Results
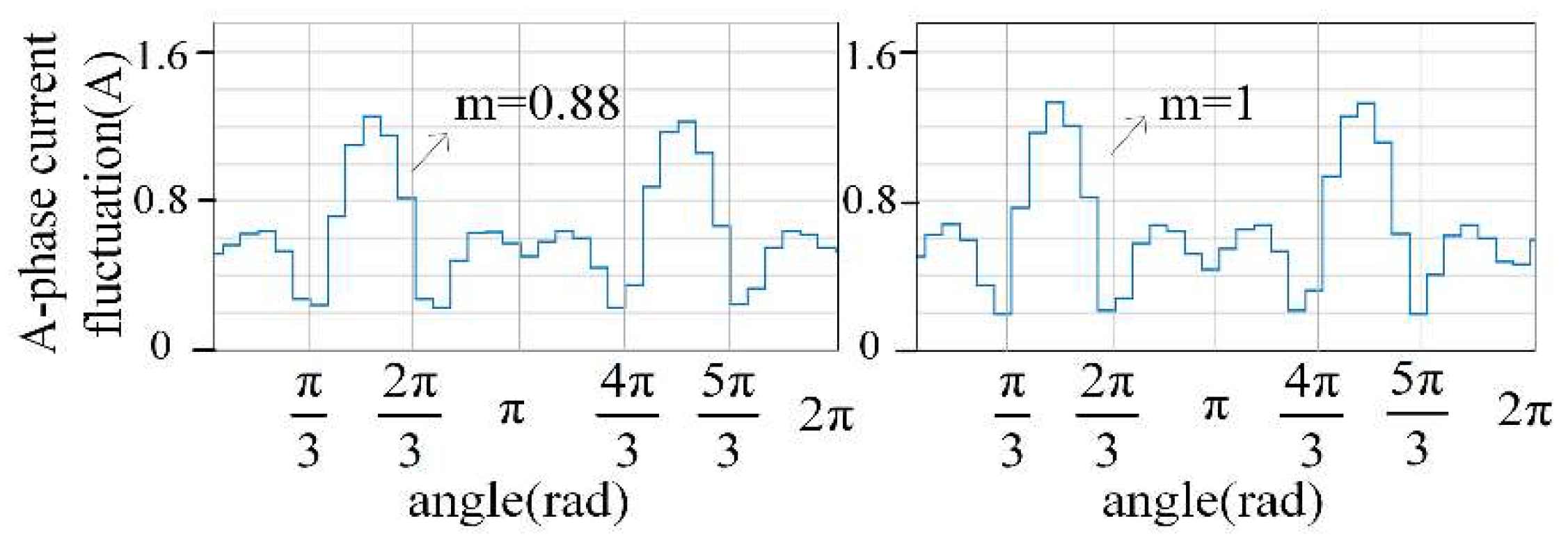
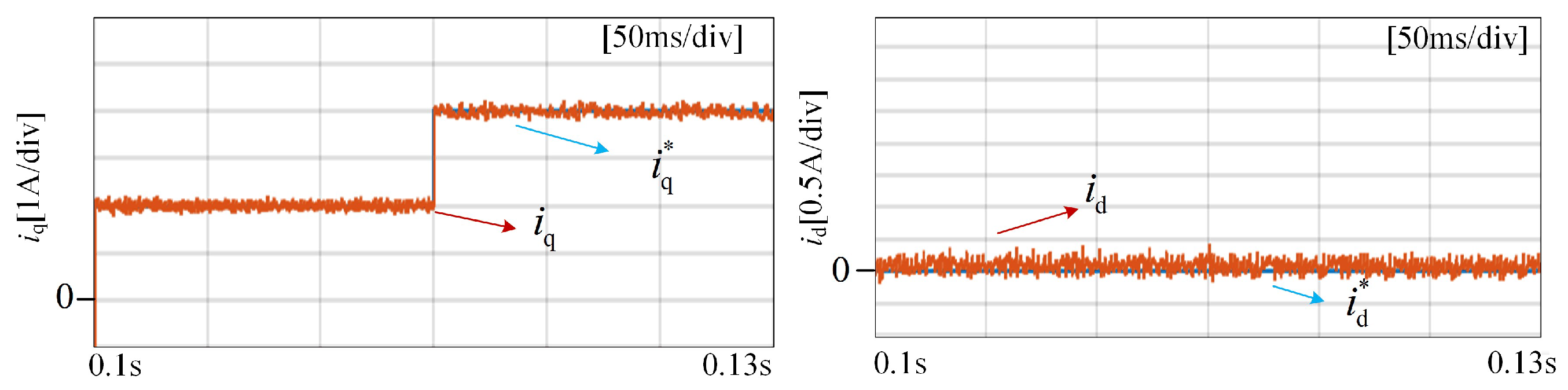
4.1. Simulation Results
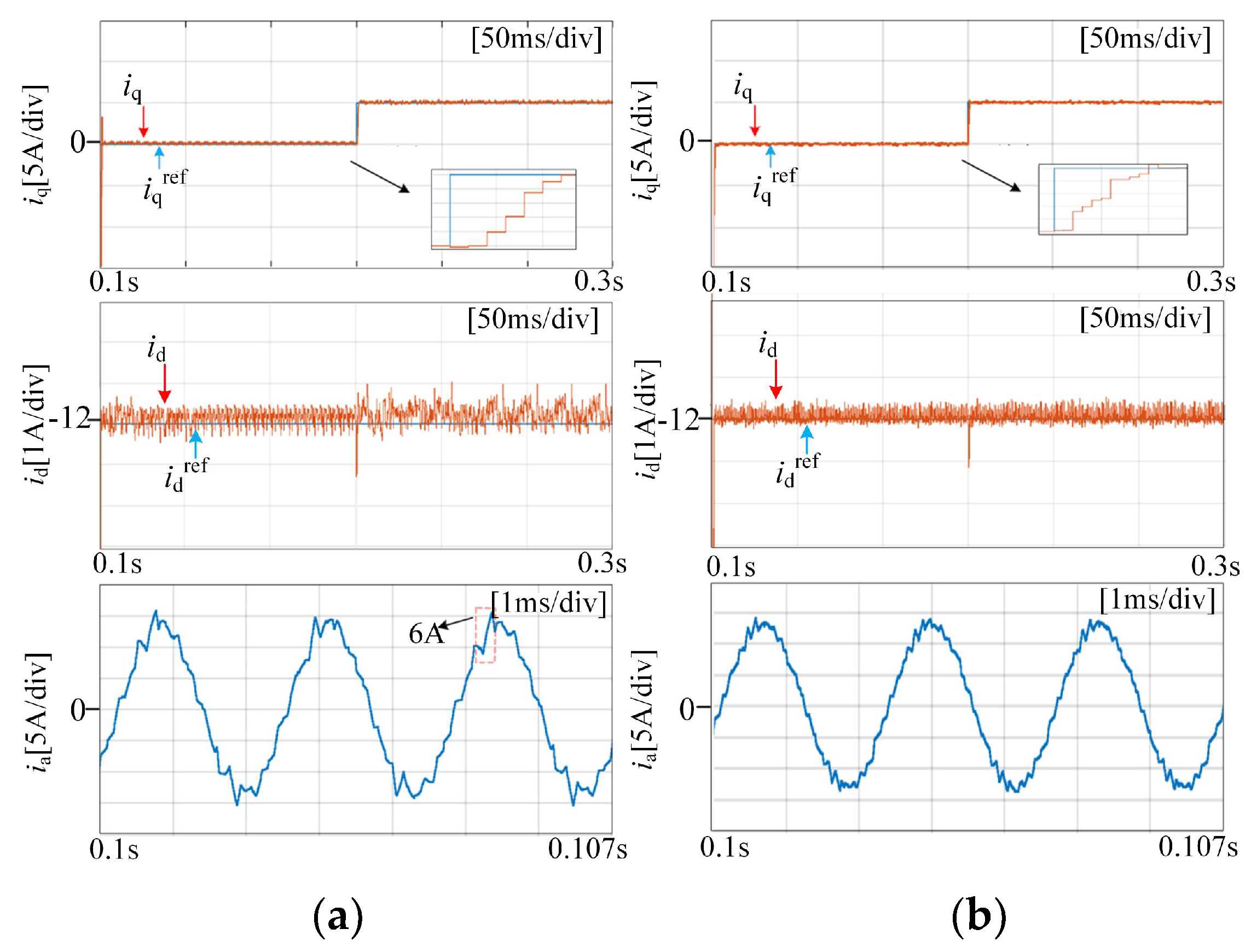
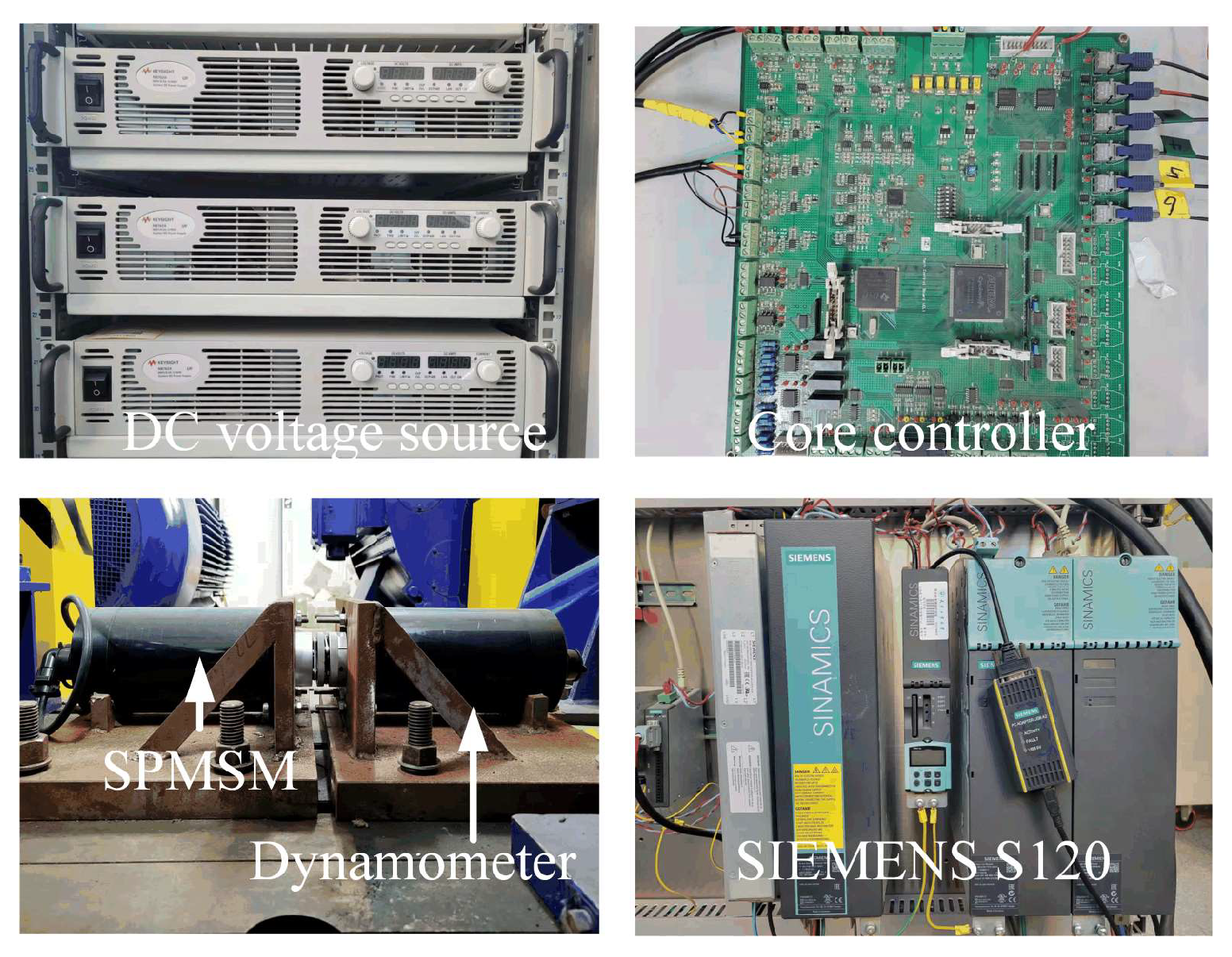
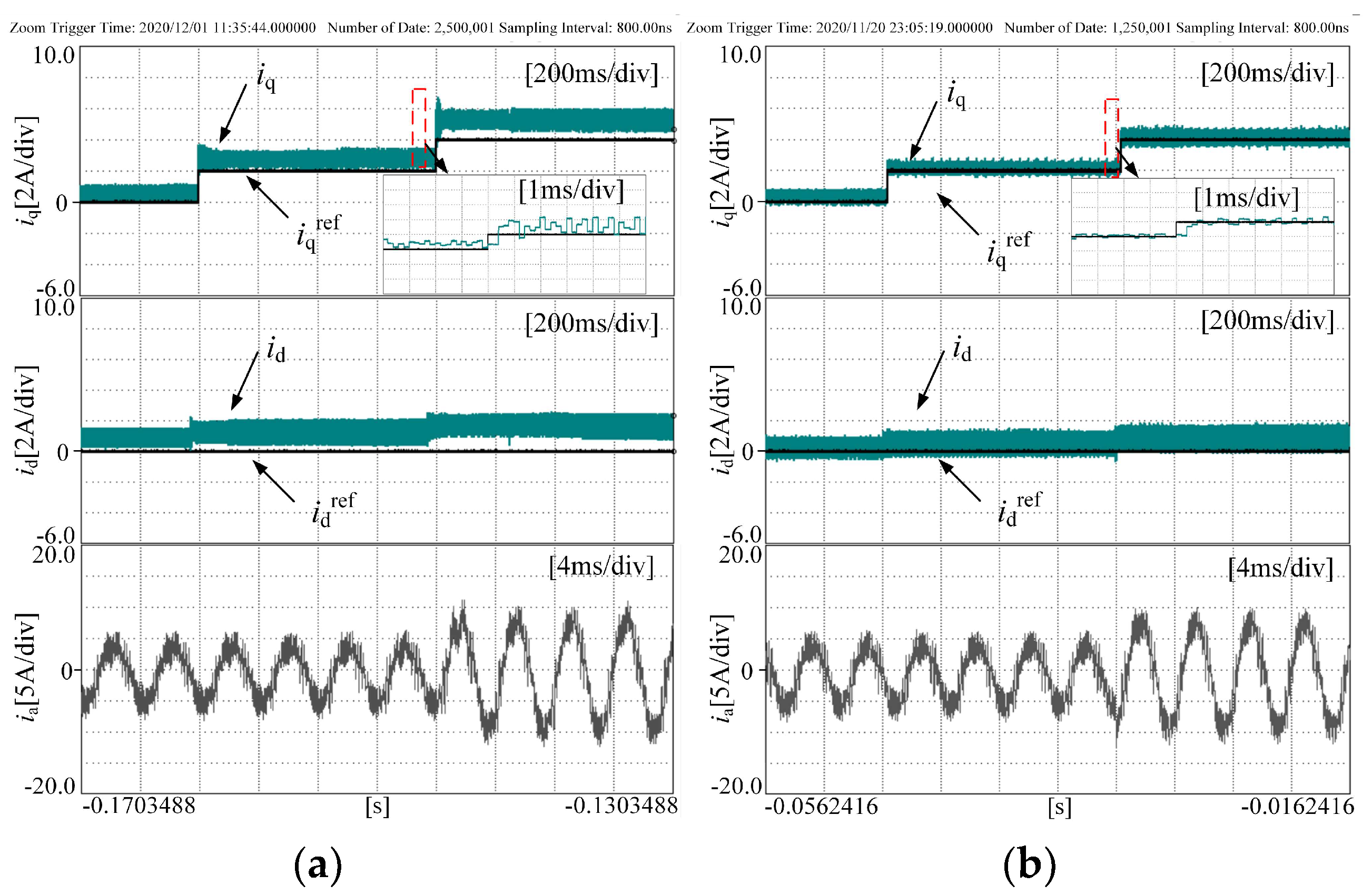
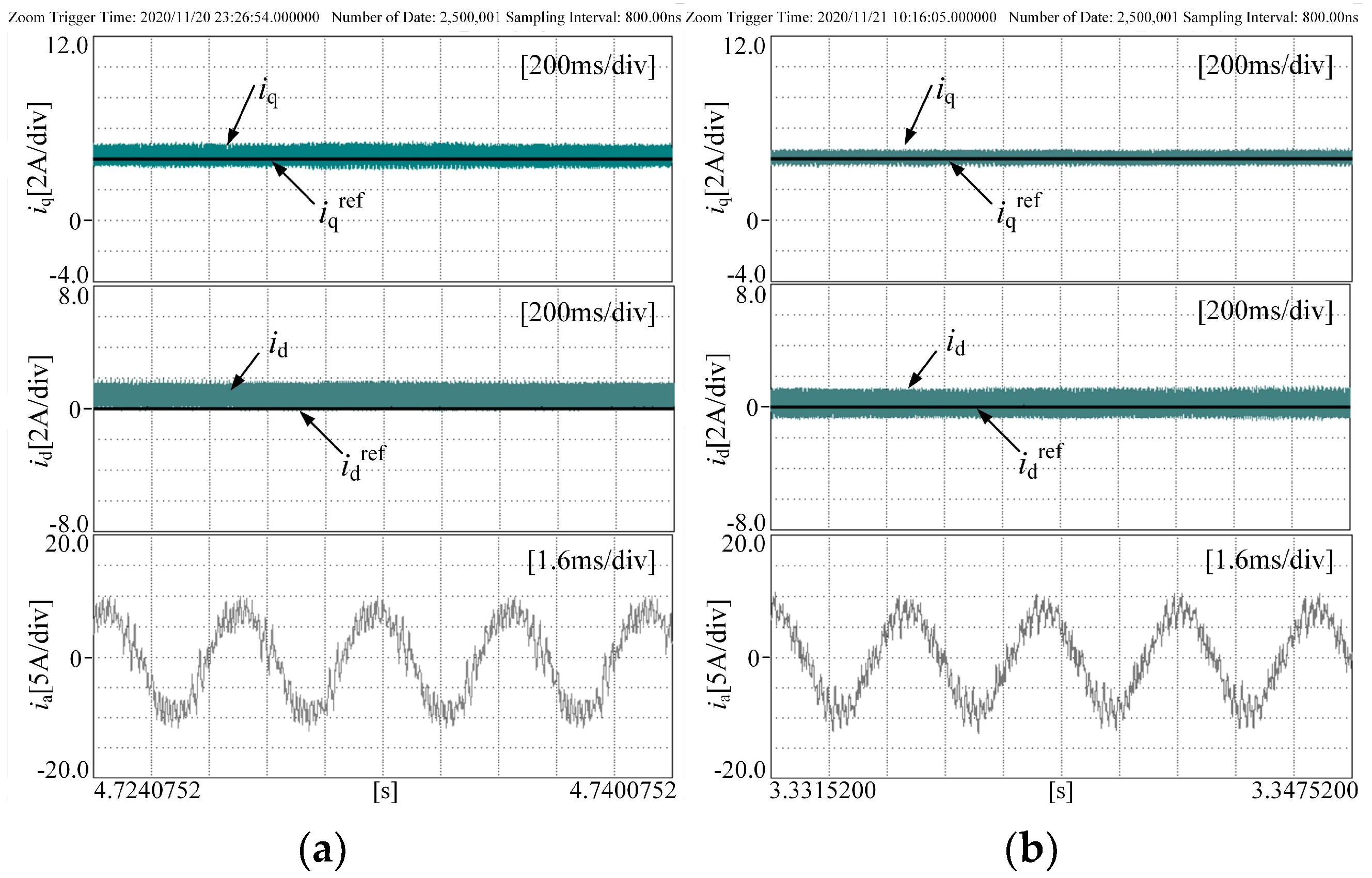
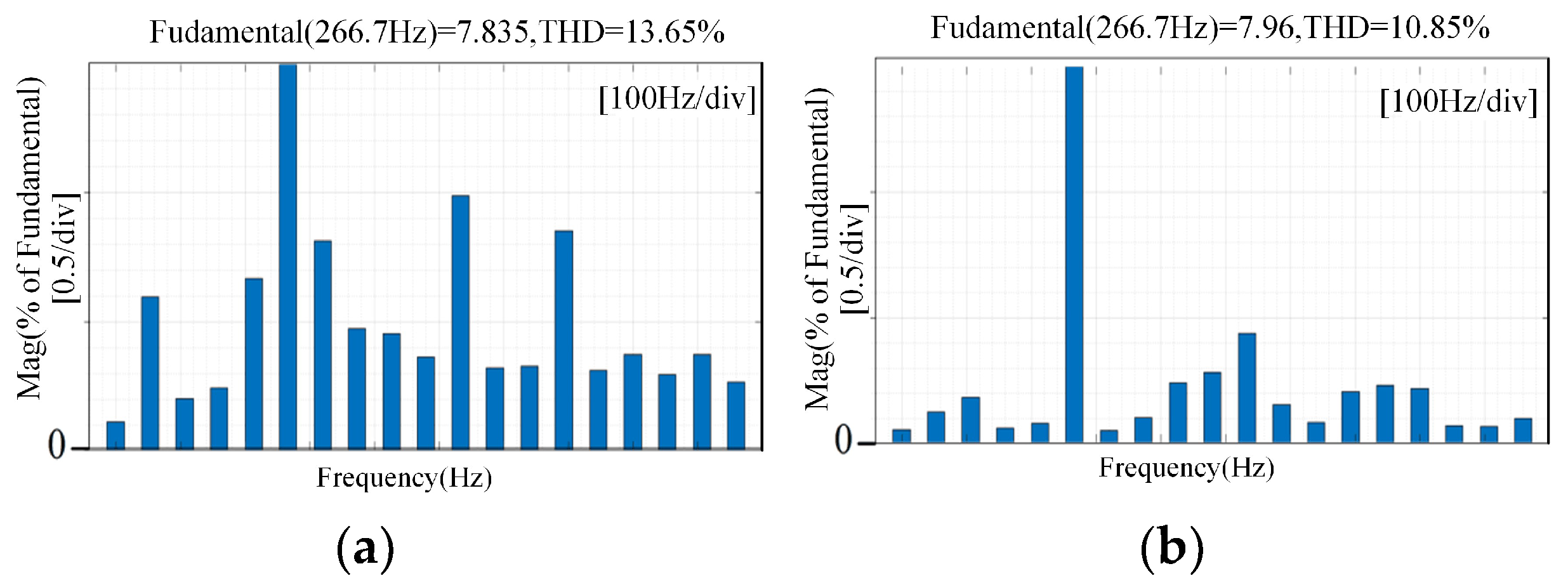
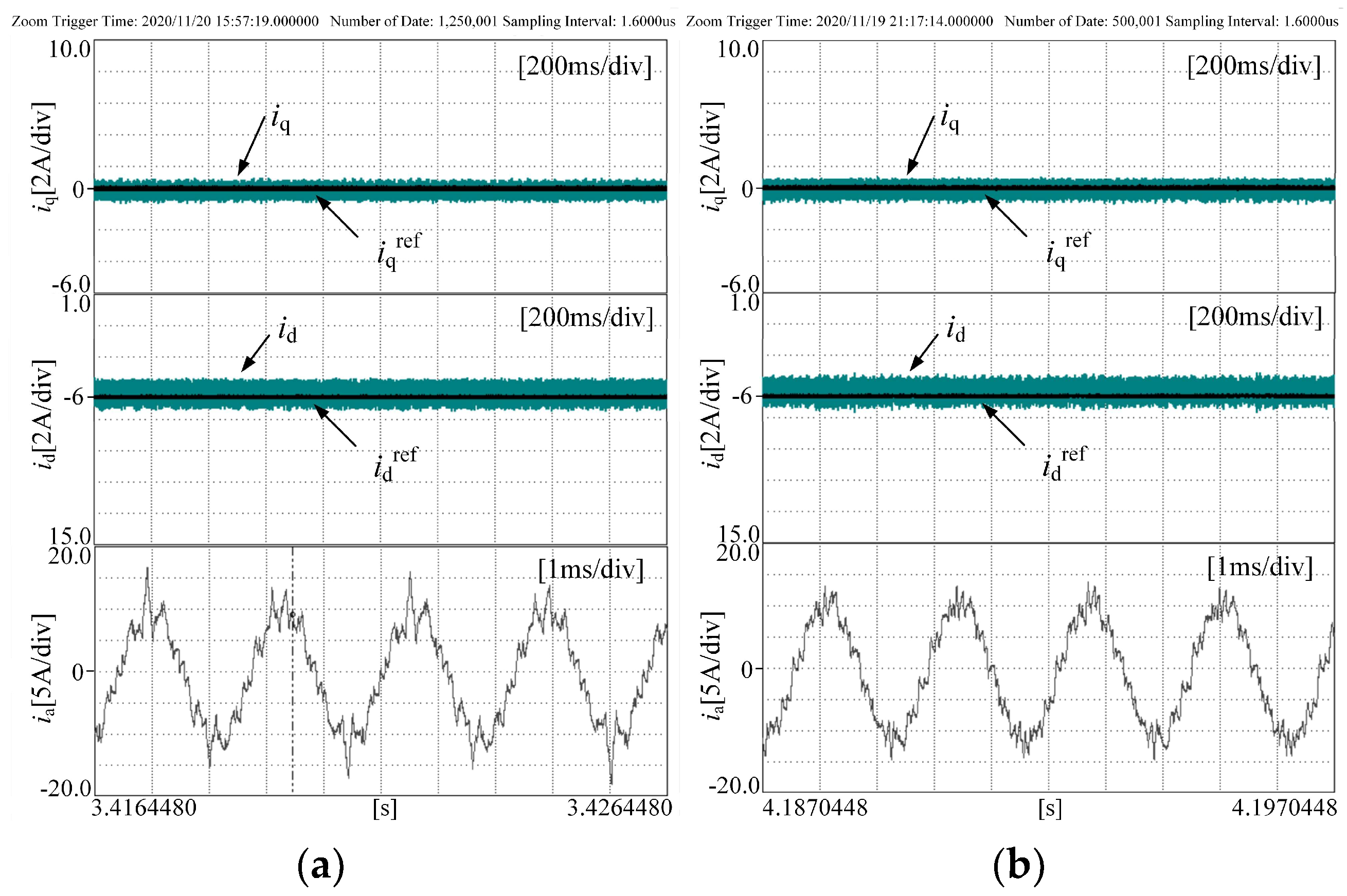
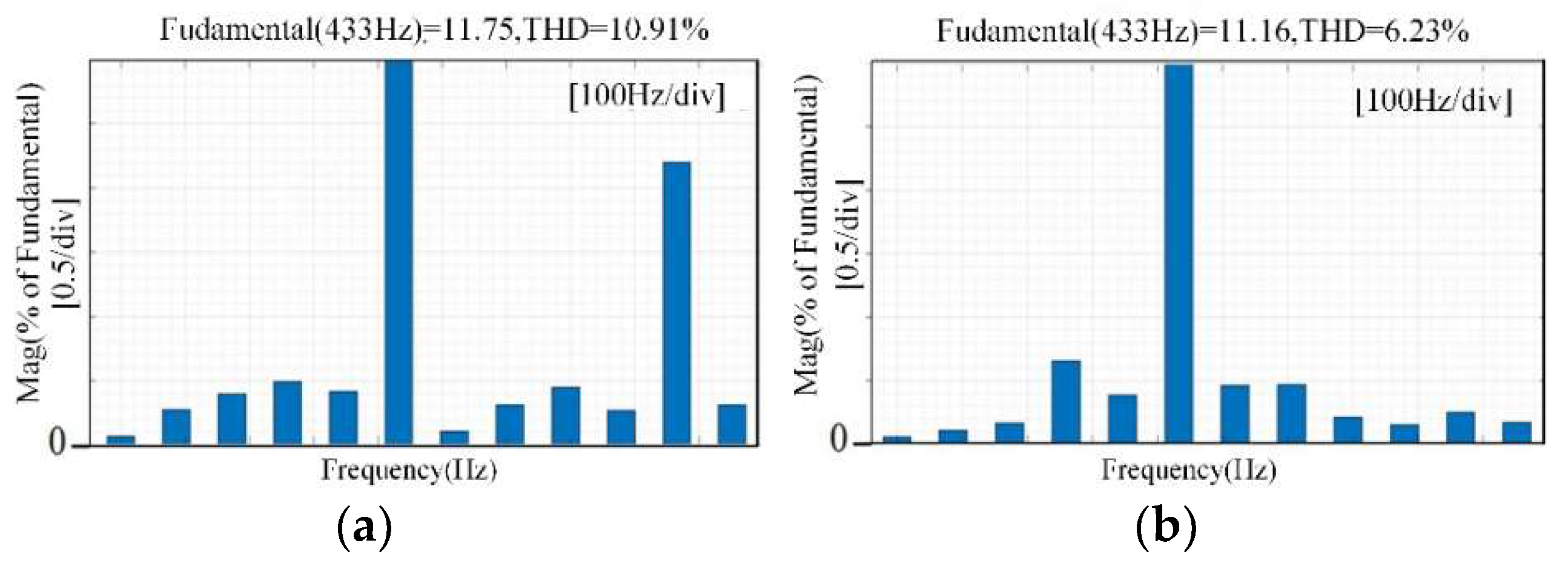
4.2. Experimantal Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lunardi, A.; Conde, D.E.R.; de Assis, J.; Fernandes, D.A. Model Predictive Control with Modulator Applied to Grid Inverter under Voltage Distorted. Energies 2021, 14, 4953. [Google Scholar] [CrossRef]
- Fang, S.; Meng, J.; Wang, W.; Meng, Y.; Wang, Y.; Huang, D. Compensation Strategy of PMSM Predictive Control with Reduced Parameter Disturbance. Sustainability 2022, 14, 9868. [Google Scholar] [CrossRef]
- Jo, G.-J.; Choi, J.-W. Gopinath Model-Based Voltage Model Flux Observer Design for Field-Oriented Control of Induction Motor. IEEE Trans. Power Electron. 2019, 34, 4581–4592. [Google Scholar] [CrossRef]
- Cai, X.; Zhang, Z.; Wang, J.; Kennel, R. Optimal Control Solutions for PMSM Drives: A Comparison Study With Experimental Assessments. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 352–362. [Google Scholar] [CrossRef]
- Shi, T.; Zhang, W.; Xiao, M.; Geng, Q.; Xia, C.L. Predictive Current Control for Permanent Magnet Synchronous Motor Based on Operating Time of Vector. Trans. China Electrotech. Soc. 2017, 32, 1–10. [Google Scholar]
- Xu, C.; Han, Z.; Lu, S. Deadbeat Predictive Current Control for Permanent Magnet Synchronous Machines With Closed-Form Error Compensation. IEEE Trans. Power Electron. 2020, 35, 5018–5030. [Google Scholar] [CrossRef]
- Wang, H.; Xu, D.; Yang, M.; Li, N. Improved Deadbeat Predictive Current Control Strategy of Permanent Magnet Motor Drives. In Proceedings of the 2011 6th IEEE Conference on Industrial Electronics and Applications, Beijing, China, 21–23 June 2011; Volume 26, pp. 39–45. [Google Scholar]
- Zhang, X.; Hou, B.; Mei, Y. Deadbeat Predictive Current Control of Permanent-Magnet Synchronous Motors with Stator Current and Disturbance Observer. IEEE Trans. Power Electron. 2017, 32, 3818–3834. [Google Scholar] [CrossRef]
- Walz, S.; Lazar, R.; Buticchi, G.; Liserre, M. Dahlin-Based Fast and Robust Current Control of a PMSM in Case of Low Carrier Ratio. IEEE Access 2019, 7, 102199–102208. [Google Scholar] [CrossRef]
- Zhang, Z.; Jing, L.; Zhao, Y.; Wu, X.; Yang, J.; Wang, J. Decoupling Control of Permanent Magnet Synchronous Motor at High Speed and Low Switching Frequency. Proc. CSEE 2020, 40, 6345–6354. [Google Scholar]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Yu, A.; Wang, S.; Zhang, C.; Chai, X.; Kan, Z. Design of Digital Current Regulator for PMSM with Low Carrier Ratio. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar]
- Guo, J.; Fan, T.; Zhang, H. Stability Analysis of Permanent Magnet Synchronous Motor Current Loop Control at High Speed and Low Carrier Ratio. Proc. CSEE 2019, 39, 7336–7346. [Google Scholar]
- Hoffmann, N.; Fuchs, F.W.; Kazmierkowski, M.P.; Schröder, D. Digital current control in a rotating reference frame-Part l: System modeling and the discrete time-domain current controller with improved decoupling capabilities. IEEE Trans. Power Electron. 2016, 31, 5290–5305. [Google Scholar] [CrossRef]
- Jarzebowicz, L. Errors of a Linear Current Approximation in High-Speed PMSM Drives. IEEE Trans. Power Electron. 2017, 32, 8254–8257. [Google Scholar] [CrossRef]
- Jarzebowicz, L.; Mirchevski, S. Modeling the impact of rotor movement on non-linearity of motor currents waveforms in high-speed PMSM driver. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications, Warsaw, Poland, 11–14 September 2017; pp. 1–8. [Google Scholar]
- Pei, G.; Liu, J.; Gao, X.; Tian, W.; Li, L.; Kennel, R. Deadbeat Predictive Current Control for SPMSM at Low Switching Frequency With Moving Horizon Estimator. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 345–353. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Z.; Gu, X.; Xia, C. Predictive Current Control of PMSM with High Speed and Low frequency ratio. Proc. CSEE 2020, 40, 3663–3673. [Google Scholar]
- Liang, Y.; Liang, D.; Jia, S.; Chu, S.; He, J. A Full-Speed Range Hybrid PWM Strategy for High-Speed Permanent Magnet Synchronous Machine Considering Mitigation of Current Harmonics. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 1886–1890. [Google Scholar] [CrossRef]
- Wang, H.; Liu, S.; Wu, S.; Guo, L.; Shi, T. Optimal Design of Permanent Magnet Structure to Reduce Unbalanced Magnetic Pull in Sur-face-Mounted Permanent-Magnet Motors. IEEE Access 2020, 8, 77811–77819. [Google Scholar] [CrossRef]
- Gao, J.; Gong, C.; Li, W.; Liu, J. Novel Compensation Strategy for Calculation Delay of Finite Control Set Model Predictive Current Control in PMSM. IEEE Trans. Ind. Electron. 2020, 67, 5816–5819. [Google Scholar] [CrossRef]
- Wang, Z.; Xie, S.; Jin, X.; Shi, T.; Yang, M. A novel deadbeat predictive current control of permanent magnet synchronous motor based on oversampling scheme. IET Power Electr. Appl. 2021, 15, 1029–1044. [Google Scholar] [CrossRef]
- Narayanan, G.; Krishnamurthy, H.K.; Zhao, D.; Ayyanar, R. Advanced bus-clamping PWM techniques based on space vector approach. IEEE Trans. Power Electron. 2006, 21, 974–984. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UN/V | IN/A | PN/kW | TN/N·m | ωN/r/min | Pn | Ls/mH | Rs/Ω | ψf/Wb |
|---|---|---|---|---|---|---|---|---|
| 540 | 19.3 | 3.7 | 11.8 | 3000 | 2 | 3.2 | 0.38 | 0.145 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Wang, C.; Liang, H.; Han, Z.; Jin, X.; Zhang, G. Variable Switching Frequency Deadbeat Predictive Current Control for PMSM with High-Speed and Low-Carrier Ratio. World Electr. Veh. J. 2023, 14, 64. https://doi.org/10.3390/wevj14030064
Wang Z, Wang C, Liang H, Han Z, Jin X, Zhang G. Variable Switching Frequency Deadbeat Predictive Current Control for PMSM with High-Speed and Low-Carrier Ratio. World Electric Vehicle Journal. 2023; 14(3):64. https://doi.org/10.3390/wevj14030064
Chicago/Turabian StyleWang, Zhiqiang, Chenyu Wang, Haishen Liang, Zhuangzhuang Han, Xuefeng Jin, and Guozheng Zhang. 2023. "Variable Switching Frequency Deadbeat Predictive Current Control for PMSM with High-Speed and Low-Carrier Ratio" World Electric Vehicle Journal 14, no. 3: 64. https://doi.org/10.3390/wevj14030064
APA StyleWang, Z., Wang, C., Liang, H., Han, Z., Jin, X., & Zhang, G. (2023). Variable Switching Frequency Deadbeat Predictive Current Control for PMSM with High-Speed and Low-Carrier Ratio. World Electric Vehicle Journal, 14(3), 64. https://doi.org/10.3390/wevj14030064